capitulo 5 - DSpace en ESPOL
Anuncio

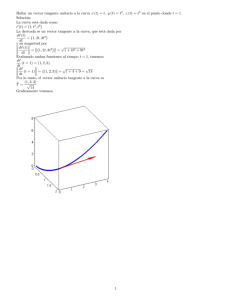
CAPITULO 5 _______________________________ “La geometría es una ciencia del conocimiento del ser, pero no de lo que esta sujeto a la generación o a la muerte. La geometría es una ciencia de lo que siempre es” Platón. TRAYECTORIAS EN R3 5.1 5.2 5.3 5.4 5.5 5.6 5.7 Interpretación de una curva como una función vectorial de variable escalar. Definiciones de velocidad, rapidez, aceleración y longitud de curva. Vectores unitarios elementales, curvatura y componentes de la aceleración para una curva en R3. Fórmulas prácticas para calcular las componentes tangencial, normal de la aceleración y curvatura. Funciones vectoriales de variable vectorial. Rotacional y divergencia de un campo vectorial. Campos vectoriales gradientes. 5.1 INTERPRETACION DE UNA CURVA VECTORIAL DE VARIABLE ESCALAR. COMO UNA FUNCION Cuando estudiamos las ecuaciones paramétricas de una curva plana en el curso de cálculo elemental para funciones de variable real, vimos que una forma de parametrizar una función de variable real y = f (x ) es de la forma: x = g (t ) ; esto es, expresar tanto la variable independiente x como la y = f ( g (t )) variable dependiente y en función de un tercer parámetro t . De igual forma, en el capítulo 2, estudiamos la forma paramétrica de expresar una recta en R3. Sin temor a equivocarnos podemos expresar una curva cualquiera en x = x(t ) , este razonamiento lo R en forma paramétrica de la forma: y = y (t ) z = f ( x(t ), y (t )) 3 podemos generalizar a la representación paramétrica de una curva en Rn, de la forma: x1 = x1 (t ) x = x (t ) 2 2 • , estas parametrizaciones son funciones • x n = x n (t ) z = f ( x1 (t ), x 2 (t ),......., x n (t )) R → R 2 para una curva plana, de R → R 3 para una curva en el n espacio tridimensional y de R → R para una curva en el espacio n – dimensional; vectoriales; de estas parametrizaciones de trayectorias son funciones vectoriales de la forma: σ (t ) = ( x1 (t ), x 2 (t ),........x n (t )) Esta función, lo que hacen es transformar un número real del dominio en un vector del espacio n – dimensional en el rango o imagen de la función; así: t ∈ (a, b) ⊂ R → ( x1 (t ), x 2 (t ),........x n (t )) ∈ U ⊂ R n , a estas se las conoce como trayectorias σ (t ) : (a, b) ⊂ R → R n . en Rn y son funciones vectoriales Entonces, figura 5-1. σ (t ) : (a, b) ⊂ R → R 3 , es una trayectoria en R3 como lo indica la Z σ (t ) σ (a) ) b ( a Figura 5-1 σ (b) Y X Definición: Una trayectoria en Rn es una función vectorial de la forma: σ (t ) : t ∈ (a, b) ⊂ R → ( x1 (t ), x 2 (t ),........x n (t )) ⊂ R n Donde x1 (t ), x 2 (t ),........, x n (t ) son sus componentes. Esta trayectoria es de 1 tipo C (diferenciable, hasta sus derivadas contínuas) en su dominio (a, b) si cada una de sus componentes son también de tipo C1 en (a, b); σ ( a ), σ (b) son los extremos de la trayectoria y su imagen es una curva en Rn Entonces para una trayectoria en R3: σ (t ) = ( x(t ), y (t ), z (t )) ; x(t ) , y (t ) y z (t ) son las componentes de la trayectoria y esta es diferenciable en (a, b) si y sólo si cada una de sus componentes son diferenciables en (a, b). Ejemplo 5-1 Analizar el gráfico de la función: σ (t ) = (t − sent ,1 − cos t ) , que es una curva plana conocida como la cicloide, formada por la trayectoria que describe un punto de un círculo rodante de radio 1. Solución: El círculo esta en el plano “X,Y” y rueda sobre el eje “X”, de tal forma que su centro se mueve hacia la derecha sobre la recta y = 1 con rapidez constante de 1 radián por unidad de tiempo. El punto del círculo rodante tiene un movimiento más complicado y es la imagen de σ (t ) , la curva que va describiendo se conoce como la cicloide, la misma que se representa en la figura 5-2 1 Figura 5-2 Ejemplo 5-2 Representar una circunferencia de radio r como una trayectoria en R2 y discutir su gráfico. Solución: El círculo de radio r es una trayectoria en R2 y esta dada por la función vectorial: σ (t ) = (r cos t , rsent ) que es la parametrización de la circunferencia de radio r, usando coordenadas polares, su gráfico se aprecia en la figura 5-3. y σ (t ) • r x Figura 5-3 Ejemplo 5-3 Analizar el gráfico de la función: σ (t ) = ( a cos t , asent , bt ) , que es una curva en R3, conocida con el nombre de hélice circular recta. Solución: Esta curva representa una espiral circular donde a es el radio de la espira y b es el espaciamiento entre espiras, su gráfico se lo puede z apreciar en la figura 5-4. σ (t ) b a y (a ,0,0 ) Figura 5-4 x 5.2 DEFINICIONES DE VELOCIDAD, LONGITUD DE CURVA. RAPIDEZ, ACELERACION Y Si consideramos una partícula de masa desplazándose por una trayectoria σ (t ) , la forma vectorial de la trayectoria representa el desplazamiento de la partícula en función del tiempo t, si la trayectoria es diferenciable, su diferencial como lo vimos en el capítulo 3 sección 3-5, tiene una singular importancia en el estudio del desplazamiento de dicha partícula. Definición: Sea de σ (t ) : t ∈ (a, b) ⊂ R → ( x1 (t ), x 2 (t ),.......x n (t )) ∈ R n , una trayectoria 1 tipo C en (a, b) el diferencial de σ (t ) es la matriz columna x1 ' (t ) x ' (t ) 2 D[σ (t )] = • , que expresada como vector representa la velocidad de una • x n ' (t ) partícula que se desplaza por la trayectoria en el tiempo t y es tangente a la misma en cualquier punto. Si la trayectoria esta en R3 es de la forma σ (t ) = ( x(t ), y (t ), z (t )) , su velocidad es el vector σ ' (t ) = x ' (t )i + y ' (t ) j + z ' (t ) k , que expresado como matriz columna es el diferencial de la función vectorial, y es tangente a la trayectoria en cualquier punto. Definición: Sea σ (t ) : t ∈ (a, b) ⊂ R → ( x1 (t ), x 2 (t ),.......x n (t )) ∈ R n , de tipo una trayectoria 1 C en (a, b) la norma del vector velocidad es la rapidez; representada por: S (t ) = σ ' (t ) Para una trayectoria en R3 la rapidez será: S (t ) = ( x' (t )) 2 + ( y ' (t )) 2 + ( z ' (t )) 2 Definición: σ (t ) : t ∈ (a, b) ⊂ R → ( x(t ), y (t ), z (t )) ∈ R 3 , una trayectoria de tipo C 1 en R3, la recta tangente a la curva en σ (t 0 ) , en forma vectorial y en función del parámetro λ esta dada por: Sea l (λ ) = σ (t 0 ) + λσ ' (t 0 ) La recta tangente a la curva punto será: x(λ ) = x(t 0 ) + λx' (t 0 ) y (λ ) = y (t 0 ) + λy ' (t 0 ) z (λ ) = z (t 0 ) + λz ' (t 0 ) σ (t ) en R3, en forma paramétrica y en cualquier Ejemplo 5-4 Solución: Calcular el vector velocidad y la rapidez de la hélice σ (t ) = (cos t , sent , t ) en R3 − sent v = σ ' (t ) = cos t ; v' = (− sent )i + (cos t ) j + k 1 S (t ) = v = (− sent ) 2 + (cos t ) 2 + 1 = 2 Ejemplo 5-5 Considere una partícula que se mueve sobre la hélice 3 σ (t ) = (cos t , sent , t ) en R ; inicia su movimiento en el punto σ (0) . En el tiempo t = π la partícula deja la trayectoria y vuela hacia fuera por la tangente, encontrar la posición de la partícula en el tiempo t = 2π suponiendo que ninguna fuerza externa actúa sobre ella después de abandonar la trayectoria. Solución: z l (π ) y = σ ' (π ) σ (π ) σ (t ) = (cos t , sent , t ) l (λ ) y σ ' (t ) = (− sent , cos t ,1) σ (0) = (1,0,0) σ (0) = (1,0,0) σ (π ) = (−1,0, π =) σ ' (t ) = (0,−1,1) x Figura 5-5 Como se aprecia en la figura 5-5 el recorrido total lo realiza la partícula por dos trayectorias; la primera es sobre la hélice σ (t ) , durante un tiempo t = π y la segunda sobre la recta tangente a la hélice en el punto σ (π ) y durante un tiempo t = π , también, por cuanto el tiempo total del recorrido es 2π ; por lo tanto al cabo del tiempo t = 2π la partícula estará sobre la recta tangente y para esto es necesario encontrar la ecuación de la recta tangente a la hélice en el punto σ (π ) : l (λ ) = (−1,0, π ) + λ (0,−1,1) Luego la posición final de la partícula será en el punto l (π ) l (π ) = (−1,−π ,2π ) ; por lo tanto en el tiempo t = 2π la partícula se encuentra en el punto (−1,−π ,2π ) Como la rapidez, representa el tamaño del vector velocidad en un punto dado, es razonable pensar que la longitud del recorrido de una partícula desde t = a , hasta t = b sea el limite de la longitud total de la poligonal que se formaría por los vectores entre cada dos puntos, hasta cubrir el total del recorrido, cuando se toman infinitos vectores desde t = a hasta t = b . Esta observación se la resume en la siguiente definición. Definición: Sea 1 σ (t ) : t ∈ (a, b) ⊂ R → ( x(t ), y (t ), z (t )) ∈ R 3 , una trayectoria de tipo 3 C en R , la longitud de curva desde t = a hasta t = b , esta dada por: b l (σ ) = ∫ σ ' (t ) dt a Otra forma de expresar la longitud de curva será: l (σ ) = ∫ b a ( x' (t )) 2 + ( y ' (t )) 2 + ( z ' (t )) 2 dt Si la curva esta en R2, la longitud de curva será: l (σ ) = ∫ b a ( x' (t )) 2 + ( y ' (t )) 2 dt Definición: Sea σ (t ) : t ∈ (a, b) ⊂ R → ( x1 (t ), x 2 (t ),.......x n (t )) ∈ R n , 2 una trayectoria de tipo C en (a, b) la aceleración de una partícula de masa que se desplaza por la trayectoria esta dada por: a = σ ' ' (t ) = ( x ' ' (t ), y ' ' (t ), z ' ' (t )) Entonces resumiendo las definiciones que hemos estudiado hasta este punto para una curva en R3 son: Definiciones: σ (t ) = ( x(t ), y (t ), z (t )) “Vector posición del punto” v = σ ' (t ) = ( x' (t ), y ' (t ), z ' (t )) “Vector velocidad del punto” a = σ ' ' (t ) = ( x' ' (t ), y ' ' (t ), z ' ' (t )) “Vector aceleración del punto” S (t ) = σ ' (t ) = l (σ ) = ∫ b a Ejemplo 5-6 [x' (t )]2 + [ y ' (t )]2 + [z' (t )]2 “Rapidez (escalar)” [x' (t )]2 + [ y ' (t )]2 + [z ' (t )]2 dt ”Longitud de arco” Encontrar la longitud de una circunferencia de radio r: σ (θ ) = (r cos θ , rsenθ ) 2π Solución: L= ∫ (− r Senθ ) 2 + (r Cosθ ) 2 dθ 0 2π L= ∫ r 2 Sen2θ + r 2 Cos 2θ dθ 0 2π L= Ejemplo 5-7 2π ∫ r dθ = r dθ = 2πr 0 0 2 ∫ Encontrar la longitud de curva de la hipocicloide: σ (t ) = (cos 3 t , sen 3 t ) , de t = 0 Solución: a t = 2π Como podemos ver en la figura 5-6, la hipocicloide no es una curva diferenciable en 0,2π ; por lo tanto, para encontrar su longitud total lo podemos hacer calculando la longitud de una de sus ramas; del punto (1,0) al punto (0,1) y por ser simétrica esta longitud la multiplicamos por 4, así: [ ] 1 3 3 Imagen de σ (t ) = (cos t , sen t ) σ ' (t ) σ (t ) 1 1 Figura 5-6 1 π L = 4 ∫ 2 (−3 cos 2 t sent ) 2 + (3sen 2 t cos t ) 2dt 0 π L = 12 ∫ 2 cos 4 t sen 2 t + sen 4 t cos 2t dt 0 π sen 2 t 2 L = 12 ∫ 2 sent cos t dt = 12 0 2 0 π L=6 Ejemplo 5-8 Encontrar la longitud de trayectoria σ (t ) = (| t |, | t − 12 |,0 ) de [− 1,1] . Solución: Este recorrido se lo puede apreciar en la figura 5-7 y por tratarse de una curva con la presencia de valor absoluto tampoco es diferenciable de − 1,1 y la podemos tomar por fragmentos de la siguiente manera: [ ] σ 1 (t ) = (−t ,−t + 12 ,0) de [− 1,0] σ 2 (t ) = (t ,−t + 12 ,0) de [0, 12 ] σ 3 (t ) = (t , t − 12 ,0) de [12 ,1] Y σ (−1) 1 ( ) σ 12 σ ( 0) ( ) σ 12 1 X 2 Figura 5-7 L = L1 + L2 + L3 L=∫ 0 −1 1 1 1 + 1dt + ∫ 2 1 + 1dt + ∫1 1 + 1dt 0 L= 2+ 2 2 + 2 2 2 =2 2 ( Ejemplo 5-9 Dada la hélice σ (t ) = cos 2t , sen 2t , 5t calcular: a.- La velocidad en t = 2π . b.- La aceleración en t = 2π . c.- La rapidez en t = 2π . d.- la longitud de curva desde t = 0 a t = 4π . Solución: a.- σ ' (t ) = (−2 sen 2t ,2 cos 2t , 5 ) v(2π ) = σ ' (2π ) = (0,2, 5) b.- σ ' ' (t ) = (−4 cos 2t ,−4 sen 2t ,0) a (2π ) = σ ' ' (2π ) = (−4,0,0) c.- S (t ) = 4sen 2 2t + 4 cos 2 2t + 5 = 3 S (2π ) = 3 ; constante, independiente de t. 4π d.- L = ∫ 3dt = 12π 0 ) en [0,4π ] , 5.3 VECTORES UNITARIOS ELEMENTALES CURVATURA COMPONENTES DE LA ACELARACION PARA UNA CURVA EN R3. Y Ahora aplicaremos los conceptos básicos estudiados en la sección anterior al movimiento de una partícula sobre la trayectoria y a la interpretación geométrica de la misma. Cuando una partícula se desplaza sobre una trayectoria C, su velocidad puede cambiar lenta o rápidamente dependiendo de si la curva se dobla en forma gradual o brusca, respectivamente. Para medir la rapidez con que se encorva, o cambia de forma una curva, se usa el concepto de curvatura, que en otras palabras seria la mediad de la rapidez con que la curva se tuerce o se dobla en un punto dado. Comencemos con los conceptos básicos que son; los de Vector Tangente Unitario y Vector Normal Unitario. Definición: Sea σ (t ) : t ∈ (a, b) ⊂ R → ( x1 (t ), x 2 (t ),.......x n (t )) ∈ R n , de tipo C 2 en (a, b), se conoce como vector tangente unitario, denotado por T (t ) , a: T (t ) = σ ' (t ) σ ' (t ) denotado por N (t ) , a: ; de igual forma se conoce como vector normal unitario, N (t ) = T ' (t ) . T ' (t ) Como se puede apreciar en la figura 5-8 T (t ) y N (t ) son vectores ortogonales y el primero es tangente a la curva y el segundo normal a la misma; además es fácil demostrar que T (t ) y N (t ) son ortogonales. Ejemplo 5-10 una trayectoria Demostrar que los vectores tangente y normal unitarios son perpendiculares en cualquier punto de la curva. Z P C T (t ) N (t ) σ (t ) Y Figura 5-8 X Solución: T (t ) = 1 ; por ser un vector unitario T (t ) • T (t ) = 1 ; propiedad del producto interno, sección 1-5 D[T (t ) • T (t )] = D[1] ; aplicando la regla de la cadena T ' (t ) • T (t ) + T (t ) • T ' (t ) = 0 2T (t ) • T ' (t ) = 0 ⇒ lo que demuestra que T (t ) y T ' (t ) son ortogonales. Ejemplo 5-11 Dada la hélice σ (t ) = (4 cos t ,4 sent ,3t ) para t ≥ 0 , encontrar los vectores T (t ) y N (t ) en cualquier punto. Solución: σ ' (t ) = (−4 sent ,4 cos t ,3) T (t ) = (−4 sent ,4 cos t ,3) = (− 45 sent , 54 cos t , 53 ) 5 T ' (t ) = (− 45 cos t ,− 45 sent ,0) (− 45 cos t ,− 45 sent ,0) N (t ) = = (− cos t ,− sent ,0) 4 5 A continuación; primero definamos curvatura para una curva plana, para luego hacerlo para una curva en R3. Como lo dijimos anteriormente, una curva plana puede parametrizarce de muchas maneras; supongamos que la paramatrizamos en función de la longitud de arco s , como lo vemos en la figura 59 cualquier punto de la curva plana C estará dado por: r ( s ) = ( x ( s ), y ( s )) , donde s , en este caso, es la longitud de curva de los puntos A a P, derivando con respecto a s se obtiene el vector tangente r ' ( s) = dx dy i+ j ds ds y su norma es: Y P r ' ( s) s C A r (s ) X Figura 5-9 2 2 2 dx dy ds r ' ( s ) = + = = 1 ; por cuanto, como se vio en el ds ds ds curso de cálculo elemental para funciones de variable real, el diferencial de longitud de 2 arco es: 2 dx dy ds = (dx) 2 + (dy ) 2 = + dt . dt dt En base a lo anterior punto P, como se aprecia en la figura 5-9, a este vector lo denotamos por T (s ) . En la figura 5-10 observamos que θ es el ángulo que forma T (s ) con el vector unitario i , la rapidez de variación de θ con respecto a s esta dθ medida por y en el ds r ' ( s ) es un vector unitario tangente a la curva C en el R Y Y V Q T (s ) C P θ W i mismo gráfico podemos X apreciar que esta rapidez de variación es pequeña en los puntos Q y V, donde la Figura 5-10 curva se dobla levemente; mientras que en los puntos R y W esta rapidez de variación es grande y aquí la curva se dobla en forma abrupta. Estas observaciones se concretan en la siguiente definición. Definición: Sea C una curva plana regular, dada por: r ( s ) = ( x( s ), y ( s )) , donde el parámetro s es la longitud de curva y sea θ el ángulo que forma el vector tangente unitario T (s ) con el vector unitario i , la curvatura k de la curva C en el punto P(x, y) esta dada por: k= dθ ds Ejemplo 5-12 Demostrar que la curvatura de una recta es cero en todos sus puntos. Y Solución: Como se aprecia en la figura 5-11, en todos los puntos de la recta l el ángulo θ es constante; l T (s ) dθ =0 y ds por lo tanto k = 0 en θ = cte P por lo tanto i X todos sus puntos. Figura 5-11 Ejemplo 5-13 Demostrar que la curvatura en todos los puntos de una circunferencia de radio R es Solución: 1 . R En la figura 5-12 hemos graficado una circunferencia de radio R y con centro en el origen; P es un punto de la circunferencia en el primer cuadrante α es el ángulo AOP medido en radianes y s es la longitud de arco AP, por lo tanto: Y Y T (s ) θ P α 0 A(k ,0) Figura 5-12 s = Rα ; α = s ; R en la figura 5-12 podemos ver: θ =α + π 2 = s π + ; derivando con respecto a s: R 2 X dθ 1 dθ 1 = +0 ⇒ k = = ds R ds R Como mensaje del ejemplo 5-13 podemos definir radio de curvatura, denotado por ρ , como el radio de una circunferencia imaginaria a la que pertenecería el arco de curva C; con esto es fácil interpretar que el radio de curvatura de un recta es infinito y el de cualquier otra curva regular que no sea recta es un valor finito definido por: ρ= 1 ; el inverso de la curvatura. k Si la curva plana esta como 5-1 y = f (x) : tan θ = y ' de donde, θ = tan −1 y ' Derivando θ con respecto a 5-2 x y aplicando la regla de la cadena se tiene: dθ dθ dθ ds dθ dx = , ⇒ = ds dx ds dx ds dx Como la curvatura es el valor absoluto de la variación de de la ecuación 5-3: 5-3 θ con respecto a s, dθ dx ; De la ecuación 5-2; dx dθ 1 = y ' ' y por otro lado ds = 1 + ( y ' ) 2 ; entonces: 2 dx 1 + ( y ' ) k= k= ds y' ' [1 + ( y' ) ] 2 3 2 5-4 La ecuación 5-4 serviría para calcular la curvatura de una curva plana cuando se tiene a la curva de la forma normal de expresar una función de variable real y = f ( x) . Si la curva esta dada en forma paramétrica σ (t ) = ( x(t ), y (t )) tenemos: y ' (t ) −1 y ' (t ) , derivando esta última: ; θ = tan x' (t ) x' (t ) dθ 1 x' (t ) y ' ' (t ) − x' ' (t ) y ' (t ) = , además: 2 dt 1 + ( y ' (t ) x' (t ) ) ( x' (t )) 2 ds = ( x' (t )) 2 + ( y ' (t )) 2 , entonces: dt tan θ = k= x' (t ) y ' ' (t ) − x' ' (t ) y ' (t ) dθ dt dθ = = 3 ds ds dt ( x' (t )) 2 + ( y ' (t )) 2 2 [ ] 5-5 La ecuación 5-5 sirve para calcular la curvatura de una curva plana cuando esta está dada en forma paramétrica. Sea C una curva regular en el espacio tridimensional, el análisis de la curvatura no puede hacerse en forma análoga al que acabamos de hacer para una curva plana por cuanto el ángulo θ no es único; por lo tanto el análisis lo vamos hacer desde otro enfoque que es similar al usado para curvas en dos dimensiones. En dos dimensiones, el vector tangente unitario escribir: T ( s ) se lo puede, también, T ( s ) = cos θi + senθj , donde θ es el mismo ángulo del que hablamos anteriormente, derivando esta última con respecto a s tenemos: T ' ( s ) = − senθ T ' (s) = dθ dθ dθ i + cos θ j= (− senθi + cos θj ) , su norma será: ds ds ds dθ dθ − senθi + cos θj = =k. ds ds Este es el enfoque que usaremos para analizar la curvatura en tres dimensiones, escribiremos el vector tangente unitario T ( s ) sin hacer referencia al ángulo θ y luego definiremos k como: k = T ' ( s) 5-6 Dada la curva en R3 de la forma anteriormente: 2 r ( s ) = ( x( s ), y ( s ), z ( s )) , como lo vimos 2 2 2 dx dy dz ds r ' (s) = + + = = 1 ds ds ds ds Lo que quiere decir que T (s) = r ' (s ) . Si la curva esta dada en función del parámetro t , de la forma: σ (t ) = ( x(t ), y (t ), z (t )) , el vector tangente unitario también lo podemos escribir de la forma: σ ' (t ) σ ' (t ) T (s) = En la 5-7 como y por tanto: σ ' (t ) σ ' (t ) = T ( s ) σ ' (t ) es la velocidad 5-7 v(t ) y σ ' (t ) es la rapidez conocida como la razón de cambio de la longitud de curva con respecto al tiempo, tenemos: v(t ) = ds T ( s ) , derivando esta expresión con respecto al tiempo, tenemos: dt a (t ) = v' (t ) = d 2s ds d (T ( s )) d 2 s ds ds T ( s ) + = 2 T ( s ) + T `( s ) 2 dt dt dt dt dt dt a (t ) = v' (t ) = d 2s ds T ( s ) + T `( s ) 2 dt dt 2 5-8 Como se demostró en el ejemplo 5-10, las vectores T (s ) y T ' ( s ) son perpendiculares; entonces el normal unitario en función del parámetro s esta dado por: N ( s) = T ' (s) , remplazando 5-6 en esta última tenemos: T `( s ) N (s) = T ' (s) , o lo que es lo mismo: T ' ( s ) = kN ( s ) k 5-9 Remplazando 5-9 en 5-8, tenemos: 2 d 2s ds a (t ) = v' (t ) = 2 T ( s ) + k N ( s ) dt dt 5-10 Como la aceleración se puede escribir de la forma: a (t ) = aT T ( s ) + a N N ( s ) Z donde d 2s aT = 2 dt la componente tangencial de la aceleración y N ( s) X es aN la componente normal de la aceleración; podemos deducir de la ecuación 5-10, que: T ( s) ds aN = K dt aT a (t ) aT = Y 2 dv d 2 s = dt dt 2 5-11 2 ds a N = kv = k 5-12 dt Figura 5-13 2 La figura 5-13 permite apreciar cada una de estas componentes de la aceleración. 5.4 FÓRMULAS PRÁCTICAS PARA CALCULAR LAS COMPONENTES TANGENCIAL, NORMAL DE LA ACELERACIÓN Y CURVATURA. Dada una curva en R3 como una función vectorial de la forma σ (t ) = ( x(t ), y (t ), z (t )) , la componente tangencial de la aceleración es la proyección escalar de la aceleración en la dirección del vector tangente unitario; por lo tanto: aT = a(t ) • T (t ) = σ ' ' (t ) • aT = σ ' (t ) σ ' (t ) , de aquí: σ ' (t ) • σ ' ' (t ) σ ' (t ) 5-13 a (t ) en función de T (s ) y N (s ) en la ecuación 5-10, también podemos expresar v(t ) en función de T (s ) de la siguiente De igual forma que calculamos la forma: v(t ) = vT ( s ) = ds T ( s ) , ahora hagamos el producto vectorial v(t ) × a (t ) : dt 2 2 ds d s ds v(t ) × a (t ) = T ( s) × 2 T ( s) + k N ( s) , o lo que es lo mismo: dt dt dt 3 2 ds d s ds v(t ) × a(t ) = 2 (T ( s) × T ( s) ) + k (T ( s ) × N ( s) ) , como: dt dt dt 3 ds T ( s ) × T ( s ) = 0 ⇒ v(t ) × a (t ) = k (T ( s ) × N ( s ) , sacando la dt norma en esta última igualdad vectorial, y sabiendo que: T ( s ) × N ( s ) = 1 , tenemos: ds v(t ) × a (t ) = k dt 3 5-14 Viendo la ecuación 5-12, podemos decir que la componente normal de la aceleración deducida de la ecuación 5-14, y sabiendo que aN = σ ' (t ) × σ ' ' (t ) σ ' (t ) ds es la rapidez,es: dt 5-15 De la 5-14 también podemos deducir una expresión práctica para la curvatura: k= σ ' (t ) × σ ' ' (t ) σ ' (t ) 3 5-16 Ejemplo 5-14 Dada la trayectoria: σ (t ) = (1 + cos t − sent , sent + cos t ) , encontrar: a.- La velocidad y la rapidez. b.- La aceleración tangencial, la aceleración normal, la curvatura y el radio de curvatura Solución: a.- σ (t ) = (1 + Cost − Sent )i + ( Sent + Cost ) j v = D[σ (t )] = σ ' (t ) = (− Sent − Cost )i + (Cost − Sent ) j rapidez = v = (−Cost − Sent ) 2 + (Cost − Sent ) 2 v = cos 2 t + 2 cos tsent + sen 2 t + cos 2 t − 2 cos tsent + sen 2 t v = 2 b.- a = σ ' ' (t ) = (− cos t + sent )i + (− sent − cos t ) j aT = (− sent − cos t )(− cos t + sent ) + (cos t − sent )(− sent − cos t ) 2 aT = 0 i σ ' (t ) × σ ' ' (t ) = − sent − cos t j cos t − sent − cos t + sent − sent − cos t σ ' (t ) × σ ' ' (t ) = 2k aN = k 0 0 2 =2 2 2 2 a = aT + a N = 2 a = sen 2 t − 2 cos tsent + cos 2 t + sen 2 t + 2 sent cos t + cos 2 t a = 2 k= ρ= Ejemplo 5-15 2 ( 2) 3 = 1 2 = 2 2 1 = 2 k Dada la trayectoria: σ (t ) = (t , t 2 , t 3 ) , encontrar: a.- La velocidad y la rapidez, para t = 1 . b.- La aceleración tangencial, la aceleración normal, la curvatura y el radio de curvatura, para t = 1 . Solución: a.- σ (t ) = ti + t 2 j + t 3 k v = D[σ (t )] = σ ' (t ) = i + 2tj + 3t 2 k vt =1 = i + 2 j + 3k rapidez = v = (1) 2 + (2t ) 2 + (3t 2 ) 2 = 1 + 4t 2 + 9t 4 v t =1 = 1 + 4 + 9 = 14 b.- a = σ ' ' (t ) = 2 j + 6tk aT = 4t + 18t 3 1 + 4t 2 + 9t 4 aTt =1 = 22 11 14 = 7 14 i j k σ ' (t ) × σ ' ' (t ) = 1 2t 3t 2 0 2 6t σ ' (t ) × σ ' ' (t ) = 6t 2 i − 6tj + 2k 36t 4 + 36t 2 + 4 aN = 1 + 4t 2 + 9t 4 a N t =1 = Para 38 7 t = 1: 2 2 a = aT + a N = 1960 = 40 49 a = 4 + 36 = 40 k t =1 = ρ t =1 = 76 ( 14 ) 3 = 1 38 14 7 1 7 = 14 k 38 5.5 FUNCIONES VECTORIALES DE VARIABLE VECTORIAL. En el capitulo 2 sección 2-6, cuando hablamos de las funciones de varias variables, mencionamos a las funciones vectoriales de variable vectorial como aquellas que transforma un vector del dominio Rn en otro vector del rango Rm; esto es: Podemos citar algunos ejemplos prácticos de este tipo de funciones como: Imaginémonos un gas comprimido en una cámara; y en el, una función vectorial que relaciona un punto cualquiera del interior de la cámara con la velocidad del gas de una partícula del mismo situada en dicho punto del interior de la cámara; esta función vectorial relaciona: Como se puede ver es una función vectorial de R3 a R3 5.6 ROTACIONAL Y DIVERGENCIA DE UN CAMPO VECTORIAL. Definición: Dado un campo vectorial F : U ⊆ R 3 → R 3 , F = (F1 , F2 , F3 ) diferenciable, definido en el conjunto abierto producto vectorial (∇ × F ) ∂ ∂ ∂ U en R 3 , ∇ el operador , , ; al ∂x ∂y ∂z se lo llama rotacional del campo y se lo simboliza rot F . rot F = (∇ × F ) = i j k ∂ ∂x ∂ ∂y ∂ ∂z F1 F2 F3 ∂F ∂F ∂F ∂F ∂F ∂F rot F = 3 − 2 i + 1 − 3 j + 2 − 1 k ∂z ∂z ∂x ∂x ∂y ∂y • • • Observaciones El rotor del campo es un vector Es aplicable para verificar si un campo vectorial es gradiente o no. Es aplicable para verificar si un campo vectorial es de fuerzas rotacionales o no. Ejemplo 5-16 Encontrar ( el ) rotacional ( ) F ( x, y, z ) = x + y i + xyz j + z + x k 2 2 del campo Solución: i ∂ rot F = ∂x x2 + y j ∂ ∂y xyz k ∂ ∂z z2 + x ∂ 2 ∂ 2 ∂ 2 ∂ = z + x − ( xyz )i + x +y − z +x ∂z ∂x ∂y ∂z ( ) ( ) ( ∂ ∂ 2 + ( xyz ) − x + y k ∂y ∂x = (0 − xy )i + (0 − 1) j + ( yz − 1)k rot F = − xy i − j + ( yz − 1)k ( ) Teorema 5-1 Sea R3 . f : U ⊂ R 3 → R ; una función de clase C2 definida el conjunto abierto U de Su gradiente ∇f : U ⊆ R 3 → R 3 , ∇f = ( ∂f ∂x ) , ∂∂fy , ∂∂fz . Entonces el rotacional del gradiente es cero. Demostración: rot ∇f = i j k ∂ ∂x ∂f ∂x ∂ ∂y ∂f ∂y ∂ ∂z ∂f ∂z ∂2 f ∂2 f ∂2 f ∂2 f ∂2 f ∂2 f i + j + k = − − − ∂z∂y ∂y∂z ∂x∂z ∂z∂x ∂y∂x ∂x∂y = (0,0,0 ) ∴ rot ∇f = 0 Definición: ) j Dado un campo vectorial F : U ⊆ R 3 → R 3 , F = (F1 , F2 , F3 ) diferenciable, definido en el conjunto abierto producto vectorial ∂ ∂ ∂ U en R 3 , ∇ el operador , , ; al ∂x ∂y ∂z (∇ • F ) se lo llama divergencia del campo y se lo simboliza div F . ∂ ∂ ∂ ∂F ∂F ∂F div F = (∇ • F ) = , , • (F1 , F2 , F3 ) = 1 + 2 + 3 ∂x ∂y ∂z ∂x ∂y ∂z • • Observaciones La divergencia del campo es un escalar La divergencia sólo se aplica para funciones vectoriales Encontrar Ejemplo 5-17 ( la divergencia F ( x, y, z ) = e , x + y + z , xyz xyz 2 2 2 ) del campo Solución: ∂ ∂ ∂ div F = , , • e xyz , x 2 + y 2 + z 2 , xyz ∂x ∂y ∂z ∂ xyz ∂ 2 ∂ = e + x + y 2 + z 2 + ( xyz ) ∂x ∂y ∂z ( ( ) ( ) ) = yze xyz + 2 y + xy div F = yze xyz + 2 y + xy Teorema 5-2 3 3 Sea F : U ⊆ R → R ; un campo de clase C2 definida el conjunto abierto U de R3. Entonces la divergencia del rotacional del campo es cero. Demostración: ∂F ∂F ∂F ∂F ∂F ∂F rot F = 3 − 2 i + 1 − 3 j + 2 − 1 k ∂z ∂z ∂x ∂x ∂y ∂y ∂ ∂F ∂F ∂ ∂F ∂F ∂ ∂F ∂F div(rot F ) = 3 − 2 + 1 − 3 + 2 − 1 ∂x ∂y ∂z ∂y ∂z ∂x ∂z ∂x ∂y ∂ 2 F3 ∂ 2 F2 ∂ 2 F3 ∂ 2 F1 ∂ 2 F2 ∂ 2 F1 − + − + − =0 ∂y∂x ∂z∂x ∂z∂y ∂x∂y ∂x∂z ∂y∂z ∴ div(rot F ) = 0 = 5.7 CAMPOS VECTORIALES GRADIENTES. Una función F ( x, y, z ) = ( f1 ( x, y, z ), f 2 ( x, y, z ), vectorial en R3 , f 3 (x, y, z )) puede ser una función gradiente; lo que quiere decir que puede tratarse del gradiente de una cierta función escalar (f) en cuyo caso la función “f” se la llama función potencial del campo. Las funciones gradientes constituyen campos conservativos (en los cuales el trabajo es independiente de la trayectoria), las funciones que no son gradientes constituyen campos disipativos o no conservativos (en los cuales el trabajo no es independiente de la trayectoria). Averiguamos si un campo vectorial F es o no gradiente con su rotor, si es igual a cero es un campo gradiente, si distinto a cero no es gradiente. Cuando un campo es gradiente podemos encontrar su función potencial. rot F = 0 Campo Vectorial Gradiente rot F ≠ 0 Campo Vectorial No gradiente Campo Vectorial F Ejemplo 5-18 Investigar si el campo vectorial campo gradiente Función Potencial No tiene Función Potencial F ( x, y, z ) = yi − xj es o no un Solución: rot F = i j k ∂ ∂x ∂ ∂y ∂ ∂z y −x 0 = 0i + 0 j + ( −1 − 1)k = −2k ≠ 0 i j k ∂ ∂x ∂ ∂y ∂ ∂z F1 F2 F3 rot F = (∇ × F ) = ∂F ∂F ∂F ∂F ∂F ∂F rot F = 3 − 2 i + 1 − 3 j + 2 − 1 k ∂z ∂z ∂x ∂x ∂y ∂y ∴ F no es un campo gradiente Ejemplo 5-19 Averiguar si ( F ( x, y, z ) = 2 xye el x2 y campo 2 x2 y 3 , z +x e , 3 yz 2 vectorial ) es o no conservativo, y en caso de serlo determinar su función potencial. Solución: i rot F = j ∂ ∂x 2 xye x k ∂ ∂y 2 y ∂ ∂z z 3 + x 2e x 2 y 3 yz 2 = (3 z 2 − 3 z 2 )i + (0 − 0 ) j 2 2 2 2 + ( 2 xe x y + 2 x 3 ye x y − 2 xe x y − 2 x 3 ye x y )k =0 ∴ F es un campo gradiente 2 2 2 ∂f = 2xyex y f (x, y, z ) = ∫ 2xyex y ∂x =e x y + k ( y, z ) x ∂x 2 2 2 ∂f = z 3 + x 2e x y f (x, y, z ) = ∫ z 3 + x2e x y ∂y = z 3 y + e x y + k (x, z ) y ∂y ∂f = 3 yz2 f (x, y, z ) = ∫ 3yz2∂z = z 3 y + k (x, y ) z ∂z x2 y 3 f ( x, y , z ) = e + z y + k ( )