Capítulo 2
Marco Teórico
En este capítulo encontraremos las deniciones y notaciones que usaremos a lo largo de
la tesis, así como también algunos lemas y teoremas que nos serán de gran ayuda.
2.1 Deniciones y Conceptos Básicos
A continuación presentaremos la denición de conjunto factible esencial para el resto
de la tesis.
Denición 2.1.
Sea
M = {x ∈ Rn | hi (x) = 0, i ∈ I = {1, . . . , m} ,
gj (x) ≥ 0, j ∈ J = {1, . . . , p}}
donde hi , gj ∈ C 1 (Rn , R), i ∈ I , j ∈ J . A M se le conoce como conjunto factible,
a las funciones hi se les llama restricciones igualdad (o ecuaciones) y a las funciones
gj , restricciones desigualdad. Cuando hablemos de restricciones, estaremos hablando
indistintamente de las restricciones de igualdad o desigualdad.
Cabe mencionar que es posible que el problema sólo tenga restricciones desigualdad,
es decir m = 0, o viceversa (p = 0).
6
CAPÍTULO 2.
7
MARCO TEÓRICO
A continuación veremos algunas deniciones que nos ayudarán a comprender la
teoría básica de la optimización no lineal.
Denición 2.2.
El problema (P ) se expresa de la siguiente manera:
(P ) mı́n {f (x) | x ∈ M }
Al punto x ∈ M se le conoce como punto factible.
A f se le llama función objetivo, es decir, la función que se busca minimizar.
Usualmente se habla de minimizar y no de maximizar. Claramente maximizar f
puede obtenerse de minimizar −f .
Denición 2.3.
Sea M como en la Denición 2.1. A x̄ ∈ M se le llama mínimo local
del problema (P ), si existe una vecindad U(x̄) de x̄ tal que f (x̄) ≤ f (x) para toda
x ∈ U(x̄) ∩ M .
Denición 2.4.
Un punto x̄ ∈ M es mínimo global del problema (P ), si f (x̄) ≤ f (x)
para toda x ∈ M .
Denición 2.5.
Sea x̄ mínimo local del problema (P ). Una restricción desigualdad se
dice que es activa cuando cumple la igualdad. Denotemos J0 (x̄) = {j ∈ J | gj (x̄) = 0}.
A J0 (x̄) se le llama conjunto de índices activos de x̄.
n
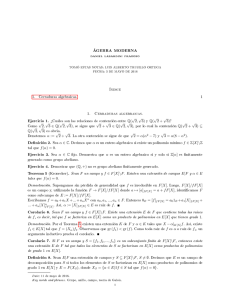
Ejemplo 2.1. En este ejemplo consideremos M = x = xx12 ∈ R2 | g1 (x) = x31 + x2 ≥
o
3
0, g2 (x) = −x1 + x2 ≥ 0 y f (x) = x1 2 + x2 , entonces el problema (P ) de minimizar
f (x) sujeto a x ∈ M se escribe como:
(P ) mı́n {f (x) | x ∈ M } .
Si x =
0
0
0
, entonces g1 y g2 son activas, y por lo tanto J0 (x ) = {1, 2}. En x =
0
1
1
1
CAPÍTULO 2.
8
MARCO TEÓRICO
Figura 2.1: La región sombreada es el conjunto factible M .
sólo g2 es activa y J0 (x ) = {2}. Finalmente, en x =
1
2
0
1
, ninguna restricción es activa,
y por lo tanto J0 (x2 ) = ∅ (Véase Figura 2.1).
Además x̄ = 00 es mínimo local y global del problema (P ).
Denición 2.6.
Sean u ∈ Rm , v ∈ Rp . La función Lagrangiana asociada al problema
(P ) se dene de la siguiente manera:
L(x, u, v) = f (x) −
X
i∈I
ui hi (x) −
X
vj gj (x)
j∈J
y sean Dx L(x, u, v) y Dxx L(x, u, v) las derivadas parciales de primer y segundo orden
de L con respecto a x, respectivamente.
Esta función es importante ya que en base a ella podemos establecer cómo encontrar
mínimos locales del problema (P ).
Al problema (P ) se le conoce como problema de programación (u optimización) no
lineal si alguna de las restricciones que hemos establecido o la función objetivo son
funciones no lineales. A lo largo de esta tesis consideraremos que (P ) es un problema
de optimización no lineal.
CAPÍTULO 2.
9
MARCO TEÓRICO
El conjunto factible M puede poseer ciertas propiedades o cualidades locales, es
decir, que dichas cualidades se cumplen para cierto punto factible. En la literatura
encontraremos una gran variedad de este tipo de cualidades, las cuales son llamadas
constraint qualications. En esta tesis, nos enfocaremos principalmente en dos de ellas:
Linear Independence constraint qualication (LICQ) y Mangasarian-Fromovitz constraint qualication (M F CQ).
Antes de explicar estos dos conceptos ((LICQ) y (M F CQ)), se dará una denición
que ayudará al lector a comprenderlos mejor.
Denición 2.7.
Sean x1 , x2 , . . ., xm ∈ Rn . Se dice que x1 , x2 , . . . , xm son linealmente
independientes si la ecuación:
m
X
(2.1)
αi xi = 0n
i=1
tiene como única solución α1 = α2 = . . . = αm = 0, donde 0n = (0, 0, . . . , 0)T (0n
representa el origen de Rn ). Por otro lado, si no son linealmente independientes, son lim
X
nealmente dependientes, esto es, que existen αi , i = 1, . . . , m,
|αi | > 0 que resuelven
i=1
la ecuación (2.1).
Ahora ya podemos denir, en términos de independencia lineal, los conceptos de
(M F CQ) y (LICQ).
Denición 2.8.
Se dice que (LICQ) se cumple en x̄ ∈ M si y sólo si los gradientes
Dhi (x̄), Dgj (x̄), i ∈ I , j ∈ J0 (x̄) son linealmente independientes.
Denición 2.9.
Se dice que (M F CQ) se cumple en x̄ ∈ M si y sólo si:
i) Dhi (x̄), i ∈ I son linealmente independientes.
ii) Existe un vector z ∈ Rn tal que:
Dhi (x̄)z = 0, i ∈ I
Dgj (x̄)z > 0, j ∈ J0 (x̄).
CAPÍTULO 2.
10
MARCO TEÓRICO
A tal vector z ∈ M que cumple con las condiciones anteriores, le llamaremos MF-vector
en x̄.
A continuación se presenta un lema que será de gran apoyo de aquí en adelante.
Lema 2.1 ([4], Teorema 10.4.7). Dados los vectores ai , bj , ck ∈ Rn , con i = 1, . . . , ma ,
j = 1, . . . , mb y k = 1, . . . , mc . Una y sólo una de las siguientes armaciones se cumple:
1. El sistema
ξ T ai < 0, i = 1, . . . , ma , ma ≥ 1
ξ T bj ≤ 0, j = 1, . . . , mb ,
ξ T ck = 0, k = 1, . . . , mc .
es soluble con ξ ∈ Rn .
2. Existen números reales αi ≥ 0, i = 1, . . . , ma , βj ≥ 0, j = 1, . . . , mb , y γk , k =
1, . . . , mc , tales que:
ma
X
i
αi a +
i=1
con
mb
X
j
βj b +
j=1
ma
X
mc
X
γk ck = 0
k=1
αi > 0.
i=1
Enseguida se presenta un teorema que relaciona (LICQ) y (M F CQ), en cuya demostración se utiliza el lema anterior.
Teorema 2.1. Sea x̄ ∈ M . Si (LICQ) se cumple en x̄, entonces (M F CQ) se cumple
en x̄.
Demostración. Si (LICQ) se cumple en x̄, entonces los vectores Dhi (x̄), Dgj (x̄), i ∈
I, j ∈ J0 (x̄) son linealmente independientes. Veamos que entonces Dhi (x̄), i ∈ I deben
ser linealmente independientes.
CAPÍTULO 2.
11
MARCO TEÓRICO
Si fueran linealmente dependientes, existirían αi ∈ R, i ∈ I donde no todos son
ceros, de tal manera que:
X
αi Dhi (x̄) = 0
i∈I
y por lo tanto
X
X
αi Dhi (x̄) +
i∈I
0 · Dgj (x̄) = 0
j∈J0 (x̄)
lo cual indicaría que Dhi (x̄), Dgj (x̄), i ∈ I , j ∈ J0 (x̄) son linealmente dependientes,
contradiciendo el supuesto inicial.
Entonces Dhi (x̄), i ∈ I son linealmente independientes, y se cumple i) de la Denición 2.9.
Antes de seguir con la demostración, veamos lo siguiente:
Sean wk ∈ Rn , k = 1, . . . , mw vectores linealmente independientes, entonces también lo son los vectores −wk , k = 1, . . . , mw , ya que de lo contrario existirían números
reales ck , k = 1, . . . , mw no todos cero tales que:
mw
X
ck (−wk ) = 0
k=1
y cambiando de lugar el signo, obtenemos
mw
X
−ck wk = 0
k=1
lo cual indicaría que los vectores wk , k = 1, . . . , mw son linealmente dependientes,
llegando a una contradicción.
Sigamos con la demostración.
Sabemos que al ser Dhi (x̄), Dgj (x̄), i ∈ I , j ∈ J0 (x̄) vectores linealmente independientes, también lo son −Dhi (x̄), −Dgj (x̄), i ∈ I , j ∈ J0 (x̄) por lo anterior; por lo tanto
no se puede dar el caso de que existan números reales αj ≥ 0, j ∈ J0 (x̄), βi , i ∈ I con:
X
j∈J0 (x̄)
αj > 0
CAPÍTULO 2.
12
MARCO TEÓRICO
de modo que:
X
αj (−Dgj (x̄)) +
X
βi (−Dhi (x̄)) = 0.
i∈I
j∈J0 (x̄)
Por el Lema 2.1 el sistema
−Dhi (x̄)ξ = 0, i ∈ I
−Dgj (x̄)ξ < 0, j ∈ J0 (x̄)
tiene solución con ξ ∈ Rn . Multiplicando ambos lados de las expresiones anteriores por
menos uno, tenemos que el sistema:
Dhi (x̄)ξ = 0, i ∈ I
Dgj (x̄)ξ > 0, j ∈ J0 (x̄)
es soluble con ξ ∈ Rn cumpliéndose así la parte ii) de la Denición 2.9.
Por lo tanto, si (LICQ) se cumple en x̄, entonces (M F CQ) se cumple en x̄.
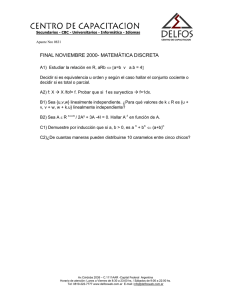
Ejemplo 2.2.
Donde se cumplen (M F CQ) y (LICQ) en x̄.
n
o
x1
n
4
Consideremos M = x = x2 ∈ R | g1 (x) = x1 − x2 ≥ 0, g2 (x) = −x1 + x2 ≥ 0
y x̄ = 00 .
Figura 2.2: (LICQ) y (M F CQ) se cumplen en x̄ =
0
0
.
CAPÍTULO 2.
13
MARCO TEÓRICO
Como ambas restricciones son activas en x̄, entonces J0 (x̄) = {1, 2}. Los gradientes
de g1 y g2 son:
Dg1 (x) = (1, −1)
Dg2 (x) = (−4x31 , 1)
y evaluados en x̄ tenemos
Dg1 (x̄) = (1, −1)
Dg2 (x̄) = (0, 1)
además existe z =
1
1
2
tal que:
Dg1 (x)z = (1, −1) 11 = 12 > 0
2
Dg2 (x)z = (0, 1) 11 = 21 > 0,
2
por lo tanto se cumple (M F CQ) en x̄.
Veamos que también se cumple (LICQ) en x̄. Para esto consideremos
α1 Dg1 (x̄) + α2 Dg2 (x̄) = (0, 0),
y resolviendo el sistema de ecuaciones llegamos a que la única solución es α1 = 0 y
α2 = 0, entonces Dg1 (x̄) y Dg2 (x̄) son linealmente independientes y por lo tanto se
cumple (LICQ) en x̄.
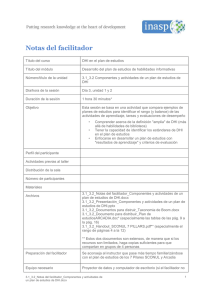
Ejemplo 2.3.
Donde se cumple (M F CQ) y no se cumple (LICQ) en x̄.
n
o
x1
2
3
3
Sean M = x = x2 ∈ R | g1 (x) = x1 + x2 ≥ 0, g2 (x) = −x1 + x2 ≥ 0 y
x̄ = 00 .
Notemos que J0 (x̄) = {1, 2}. Las derivadas de g1 , g2 son:
Dg1 (x) = (3x21 , 1)
Dg2 (x) = (−3x21 , 1)
y evaluadas en x̄:
Dg1 (x̄) = (0, 1)
Dg2 (x̄) = (0, 1)
CAPÍTULO 2.
14
MARCO TEÓRICO
Figura 2.3: Sólo (M F CQ) se cumple en x̄ =
por lo tanto existe z =
0
1
0
0
con Dj (x̄)z = (0, 1) 01 = 1 > 0, j ∈ J0 (x̄) = {1, 2}, y por
esto se cumple (M F CQ) en x̄. Sin embargo, si resolvemos la ecuación
α1 Dg1 (x̄) + α2 Dg2 (x̄) = (0, 0),
entonces existen innitas soluciones, en particular α1 = 1 y α2 = −1 resuelven la
ecuación, entonces Dg1 (x̄) y Dg2 (x̄) no son linealmente independientes, por lo que no
se cumple (LICQ) en x̄.
Ejemplo 2.4.
Donde no se cumplen (M F CQ) ni (LICQ) en x̄.
n
o
Sean M = x = xx12 ∈ R2 | g1 (x) = −x21 +4x1 −x22 ≥ 0, g1 (x) = x21 −2x1 +x22 ≥ 0
y x̄ = 00 .
Las derivadas de g1 y g2 son:
Dg1 (x) = (−2x1 + 4, −2x2 )
Dg2 (x) = (2x1 − 2, 2x2 )
y evaluadas en x̄:
Dg1 (x̄) = (4, 0)
Dg2 (x̄) = (−2, 0)
CAPÍTULO 2.
15
MARCO TEÓRICO
Figura 2.4: Ni (LICQ) ni (M F CQ) se cumplen en x̄ =
0
0
por lo tanto no existe z ∈ R2 con Dj (x̄)z > 0, j ∈ J0 (x̄) = {1, 2}, y entonces no se
cumple (M F CQ) en x̄. Tampoco se cumple (LICQ) en x̄ ya que si α1 = 1 y α2 = 2
entonces se resuelve la ecuación
α1 Dg1 (x̄) + α2 Dg2 (x̄) = (0, 0).
Cabe recalcar que por el Teorema 2.1 tenemos que si (LICQ) se cumple en x̄,
entonces también se cumple (M F CQ) en x̄, pero el recíproco no se cumple, pues el
ejemplo 2.3 nos sirve de contraejemplo.
2.2 Teoremas de Necesidad y Suciencia de Primer y
Segundo Orden
En esta sección daremos a conocer los teoremas que relacionan x̄ ∈ M como mínimo
local del problema (P ).
Teorema 2.2 (([3], Teorema 1) Condición necesaria de optimalidad de primer orden).
Si x̄ es un mínimo local del problema (P ), entonces existen coecientes reales α ≥
CAPÍTULO 2.
16
MARCO TEÓRICO
0, λi , µj ≥ 0, i ∈ I, j ∈ J0 (x̄), no todos cero, tales que:
αDf (x̄) −
X
λi hi (x̄) −
i∈I
X
µj gj (x̄) = 0
j∈J
Hagamos ahora una combinación entre (M F CQ) y la condición necesaria de primer
orden.
Teorema 2.3
([2], Teorema 2). Sea x̄ mínimo local del problema (P ). Si (M F CQ) se
cumple en x̄, entonces existen reales λi , i ∈ I y µj ≥ 0, j ∈ J0 (x̄) tales que:
Df (x̄) −
X
λi Dhi (x̄) −
i∈I
X
µj Dgj (x̄) = 0.
j∈J0 (x̄)
Por el momento hemos establecido la condición necesaria para que x̄ sea mínimo
local del problema (P ), en donde se pide que todas las funciones en el problema (P )
pertenezcan a C 1 (Rn , R). La condición suciente que veremos a continuación, exige un
poco más, ya que considera las derivadas de segundo orden de dichas funciones.
Teorema 2.4 ([3], Teorema 4) Condición suciente de optimalidad de segundo orden).
Supongamos f , hi , gj ∈ C 2 (Rn , R), i ∈ I , j ∈ J .
Si existen vectores λ̄ ∈ Rm y µ̄ ∈ Rp tales que (x̄, λ̄, µ̄) cumplan:
I)
hi (x̄) = 0, i ∈ I,
(2.2)
gj (x̄) ≥ 0, j ∈ J,
(2.3)
µ̄j gj (x̄) = 0, j ∈ J,
(2.4)
µ̄j ≥ 0, j ∈ J,
(2.5)
Dx L(x̄, λ̄, µ̄) = 0.
(2.6)
II) y que para cada z ∈ Rn r {0n } con:
CAPÍTULO 2.
MARCO TEÓRICO
17
i) Dhi (x̄)z = 0, i ∈ I ,
ii) Dgj (x̄)z = 0, j ∈ B(x̄, µ̄) := {j ∈ J | µ̄j > 0} y
iii) Dgj (x̄)z ≥ 0, j ∈ J0 (x̄) r B(x̄, µ̄),
tenemos que:
h
i
2
z T Dxx
L(x̄, λ̄, µ̄) z > 0.
(2.7)
Entonces x̄ es un mínimo local del problema (P ).
En este capítulo hemos denido el típico problema de optimización no lineal así
como las herramientas que nos ayudarán a saber si algún punto x̄ es o no un mínimo
local de dicho problema.
En el siguiente capítulo perturbaremos la condición suciente de segundo orden y,
en base a ello, deniremos las funciones que usaremos para resolver el problema de
minimización.
 0
0