Cálculo de extremos. Resumen y ejemplos (20.03.2014)
Anuncio
")
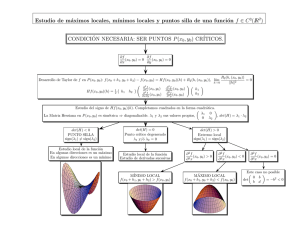
Cálculo de extremos. Resumen y ejemplos (20.03.2014) ◦ Sea f : D → R, D ⊂ Rn , f ∈ C 2 . Buscamos sus extremos en D, interior del dominio. 1) Condición necesaria. Al ser el conjunto abierto y f diferenciable, sus extremos están en puntos que cumplan la condición de gradiente nulo. Entonces los posibles extremos (puntos crı́ticos) vienen dados por las soluciones de la ecuación ~ = ~0 ∇f 2) Condición suficiente. Para saber qué puntos crı́ticos son extremos, el primer paso es determinar de qué tipo es la forma cuadrática d2 f en ellos. Sabemos que: - Si es definida, se trata de un mı́nimo (positiva) o de un máximo (negativa). - Si es indefinida, no hay máximo ni mı́nimo (punto de silla). - Si es semidefinida, solo sabemos que no puede haber máximo (si es SD positiva) o no puede haber mı́nimo (si es SD negativa). Ası́ pues, seguimos los pasos siguientes: a) ¿Es H definida? Se averigua aplicando el criterio de Sylvester. Entonces si es definida positiva, existe un mı́nimo. Si es definida negativa, un máximo. b) Si H no es definida, estudiando su determinante tenemos dos casos: b.1. |H| = 6 0 . Como |H| = |C|2 |D|, resulta que |D| = d1 d2 · · · = 6 0, lo que significa que ningún di es nulo, con lo que tendrán signos iguales o distintos. Si tuvieran igual signo, H serı́a definida, cosa que no ocurre. Entonces han de existir di ≷ 0, por lo que H es indefinida y tenemos un punto de silla. b.2. |H| = 0 . Entonces |D| = 0 por lo que los di pueden ser ≥ 0, ≤ 0 ó Q 0 (alguno ha de ser nulo), por lo que H puede ser semidefinida o indefinida. En estos casos se puede conocer el tipo diagonalizando por congruencia. En el caso particular n = 2, sólo existen dos di , de los que al menos uno es nulo. No puede entonces ser indefinida, por lo que será semidefinida. c) Casos dudosos (H semidefinida): para solucionarlos podemos probar distintas direcciones de alejamiento desde el punto ~a. Si en una dirección la función crece pero en otra decrece, se trata de un punto de silla. Lo mismo ocurre si, en la misma dirección, crece en un sentido y decrece en el otro. En el caso n = 2, podemos movernos desde (a, b) paralelamente a los ejes, o a las bisectrices y = x, y = −x. 3) Ejemplos. a) f (x, y) = x2 + y 2 + xy − x − 2y. Aplicando la condición necesaria, resulta el punto crı́tico P(0,1). La matriz hessiana 2 1 es H(0,1) = , definida positiva (Sylvester), luego se trata de un mı́nimo. 1 2 b) f (x, y) = xy + x − y − 1. Aplicando la condición resulta el punto crı́tico P(1,–1). La matriz hes necesaria, 0 1 siana es H(1,−1) = . En este caso H no es definida (Sylvester). Como 1 0 |H| = 6 0, resulta que H es indefinida, por lo que tenemos un punto de silla. c) f (x, y) = √ R 2 − x2 . Aplicando la C.N. =⇒ P(0,y) (son crı́ticos todos los puntos del eje Y ). En todos 1 −R 0 ellos, H = =⇒ |H| = 0 =⇒ H semidefinida (n = 2) =⇒ caso dudoso. 0 0 1 dx2 ≤ 0, que Para solucionarlo consideramos la diferencial segunda d2 f = − R toma valor negativo ∀ dx 6= 0. Luego el valor de f disminuye si nos movemos, desde los puntos (0, y) en cualquier dirección, salvo la dada por dx = 0. Pero dx = 0 corresponde al eje Y , donde el valor de la función es constante. Es decir, en todo punto (0, y) existe un máximo en sentido amplio, de valor z = R. Lo vemos gráficamente escribiendo la ecuación en la forma z 2 + x2 = R2 , que corresponde a un cilindro de radio R y eje horizontal (el eje OY ). La expresión del enunciado corresponde a la parte del cilindro sobre el plano XY (z ≥ 0). d) f (x, y) = y 3 − x2 − 2x − 1. Aplicando la C.N. =⇒ P(−1, 0). H(−1,0) −2 0 = . La matriz H, diagonal, es 0 0 semidefinida negativa (caso dudoso). Para resolverlo podemos –como en c)–observar que d2 f = −2dx2 . Esto nos indica que el valor de f disminuye al movernos en cualquier dirección, salvo la del eje Y . Estudiando este caso (variación sólo de la y), comprobamos que f crece si ∆y > 0 y decrece si ∆y < 0, por lo que es un punto de silla. Otra opción es movernos en las direcciones de los ejes, a partir de P(−1, 0), donde f es nula. Ası́ pues, incrementamos alternativamente x e y en un valor ∆: d.1. En cualquier punto de coordenadas (−1+∆, 0), la función toma el valor −∆2 , luego decrece, a partir de su valor en P, independientemente del signo de ∆. d.2. En cualquier punto de coordenadas (−1, ∆), la función vale ∆3 . Es decir, crece si nos movemos –a partir de P– en el sentido positivo del eje Y (∆ > 0), y decrece en caso contrario. Concluimos que, en P(−1, 0), f no tiene máximo ni mı́nimo (punto de silla). e) f (x, y, z) = 3x2 − 6x + y 4 − z 4 . Aplicando la C.N. =⇒ P(1,0,0). H(1,0,0) 6 0 0 = 0 0 0 . 0 0 0 H es semidefinida positiva (caso dudoso) y la diferencial segunda vale d2 f = 6dx2 , por lo que la función crecerá siempre que dx 6= 0. Si en cambio nos movemos a partir de P , paralelamente al plano Y Z (dx = 0), la diferencial segunda vale 0. Para identificar el tipo de extremo, nos movemos paralelamente a dicho plano a partir de P, modificando el valor de una de las variables y, z cada vez: e.1. Valor de f en P: f (1, 0, 0) = −3. e.2. Incrementamos y: f (1, ∆, 0) = −3 + ∆4 =⇒ ∆f = ∆4 , luego f crece. e.3. Incrementamos z: f (1, 0, ∆) = −3 − ∆4 =⇒ ∆f = −∆4 , luego f decrece. Se trata, entonces, de un punto de silla. No hemos probado a modificar el valor de la x, pues, como se ha dicho, la función crecerá siempre que dx 6= 0 (compruébese).