Procesos Estocásticos
Anuncio

Actividad 9, pág. 1 de 3
Procesos Estocásticos
Un sistema que puede caracterizarse por estar en cualquiera de un conjunto de estados
y puede cambiar o evolucionar de un estado a otro en el tiempo sujeto a una ley de
movimiento. Si denotamos con Xt al estado del sistema en un tiempo t y si el sistema
evoluciona de forma no deterministica, se dice que Xt es una variable aleatoria para cada
valor de t, en donde una variable aleatoria es una regla que asigna a cada respuesta ω
de un experimento un número X(ω)
Por otro lado, se dice que X(t, ω) es un proceso estocástico de espacio discreto
si sus valores son contables (variable aleatoria discreta) y en caso contrario, será
un proceso estocástico de espacio continuo.
Tal vez es evidente, pero vale la pena señalar que para un valor fijo t0 , X(t0 , ω) es una
variable aleatoria pura, para un valor ω0 fijo, X(t, ω0 ) es una magnitud deterministica
pura.
Procesos Estocásticos
Un proceso estocástico X(t) es una regla que asigna a cada evento ω una función Xt (ω) (o X(t, ω)). Ası́,
un proceso estocástico es una familia de funciones que dependen del parámetro ω o en forma equivalente, una
función de t y ω.
El dominio de ω es el conjunto de todos los posibles resultados de un experimento y el dominio de t es un
subconjunto R ⊆ IR de los números reales.
Formalmente: Sea T ⊂ IR y sea (Ω, A, P ) un espacio de probabilidad (A es una
σ−álgebra y P es una medida de probabilidad). La función
Probability, Random Variables, and Stochastics Processes, Third Edition,
Athanasios Papoulis, 1965, McGraw Hill, p.285.
es un Proceso Estocástico si se tiene que: a) Xt = X(t, ·) : Ω → IR es una variable
aleatoria para cada t ∈ T . b) Xω = X(·, ω) : T → IR es una realización o ruta muestral
para cada ω ∈ Ω
Si R es la recta real, Xt (ω) es un proceso en tiempo continuo.
X : T × Ω → IR
En la práctica, usualmente se dice que un proceso estocástico (PE) es una colección de
variables aleatorias (v.a.) {Xt , t ≥ 0} definidas sobre un espacio de probabilidad común
(Ω, A, P ).
Conceptos básicos
Evidentemente, se pueden revisar todos y cada uno de los conceptos que se revisaron
en estadı́stica básica y probabilidad, es decir, conceptos como:
Si R es contable - numerable, entonces Xt (ω) es un proceso en tiempo discreto;
de modo que, se puede decir que Xt (ω) es una secuencia y se puede denotar por
Xn (ω) o Xn .
Distribución de probabilidad: para un t especı́fico, la función de distribución de la
v.a.Xt está dada por
FX (x, t) = P {Xt ≤ x} .
Esta función dependen solamente de t y es igual a la probabilidad del evento
{Xt ≤ x}. La función FX (x, t) se conoce como distribución de primer orden
del PE Xt .
Densidad de probabilidad: La derivada
∂FX (x, t)
∂x
se conoce como densidad de primer orden del PE Xt .
f (x, t) =
Como es de esperarse, si un experimento se lleva a cabo un número n finito de veces
y de ellas se observan n funciones Xn (ω), una en cada ensayo se denota con nt (x) al
número de curvas en el tiempo t que no exceden el valor x, se concluye que
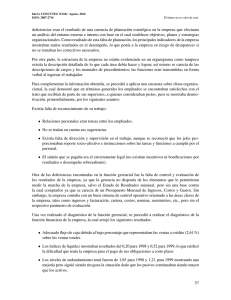
Nota: Ambos gráficos representan una trayectoria muestral de un proceso
estocástico.
I9880 – Estadı́stica y Procesos Estocásticos – Ingenierı́a Robótica.
Depto. de Cs. Computacionales, DIVEC, CUCEI, UdeG.
FX (x, t) '
nt (x)
.
n
Introducción a los Procesos Estocásticos
Laura E. Cortés N. – Rubén Sánchez G.
Actividad 9, pág. 2 de 3
Distribución de segundo orden: para dos realizaciones, la distribución conjunta
FX (x1 , x2 ; t1 , t2 ) = P {Xt1 ≤ x1 , Xt2 ≤ x2 }
de las variables Xt1 y Xt2 se conoce como distribución de segundo orden del
PE Xt y la densidad correspondiente es igual a
fX (x1 , x2 ; t1 , t2 ) =
∂FX (x1 , x2 ; t1 , t2 )
∂x1 ∂x2
PE estacionario
Un proceso estocástico es estacionario en sentido estricto si sus propiedades
estadı́sticas son invariantes ante desplazamientos temporales, es decir, si para h ≥ 0 se
tiene que
p(Xt1 +h , . . . , Xtn +h ) = p(Xt1 , . . . , Xtn )
y será estacionario en sentido amplio si
Media: la media η(t) de Xt es el valor esperado
Z
η(t) = EXt (ω) = xf (x, t)dx
R
Autocorrelación: R(t1 , t2 ) de Xt es el valor esperado
Z Z
R(t1 , t2 ) = E {Xt1 (ω)Xt2 (ω)} =
x1 x2 f (x1 , x2 ; t1 , t2 )dx1 dx2
R R
y el valor R(t1 , t2 ) sobre la diagonal t1 = t2 = t se conoce como potencia
promedio de Xt
E Xt2 (ω) = R(t, t)
Correlación cruzada: En el caso de dos procesos Xt (ωx ), Yt (ωy ), la función
ηt
=
Σt
=
EXt = m,
E (Xt − ηt )2 = C(0),
Vt,s
=
E {(Xt − ηt )(Xs − ηs )} = C(t − s).
para todo s, t ∈ R.
Se dice que un PE es de incrementos estacionarios si Xt+s − Xt tiene la misma
distribución que Xs , para todo s, t ∈ R y será de incrementos independientes si para
0 ≤ t1 < t2 < · · · < tn , las v.a.’s Xt1 , Xt2 − Xt1 , . . . , Xtn − Xtn−1 son independientes.
De forma análoga, dos procesos Xt y Yt son estacionarios en sentido estricto si la
densidad conjunta de Xt , Yt es la misma que la de Xt+h y Yt+h .
RXY (t1 , t2 ) = E[Xt1 Yt2 ]
es la correlación cruzada.
Autocovarianza: se representa con Cov(t1 , t2 ) o C(t1 , t2 ) y se define como
C(t1 , t2 ) = R(t1 , t2 ) − η(t1 )η(t2 )
Objetivos:
a) Que el alumno calcule caracterı́sticas básicas de procesos estocásticos. b) Que obtenga
representaciones gráficas de procesos estocásticos.
y su valor C(t, t) sobre la diagonal t1 = t2 = t es igual a la varianza de Xt .
Covarianza cruzada: Para los procesos Xt (ωx ), Yt (ωy ), la función
CXY (t1 , t2 ) = RXY (t1 , t2 ) − ηX (t1 )ηY (t2 )
se conoce como la correlación cruzada de Xt (ωx ) y Yt (ωy ).
Los procesos Xt (ωx ), Yt (ωy ) son mutuamente ortogonales si RXY (t1 , t2 ) = 0 para todo
t1 , t2 y serán no correlacionados si CXY (t1 , t2 ) = 0 para todo t1 , t2 .
Reportes entregables:
NOTA: Resuelva usando software [MatLab(octave) preferible] y entregue (por correo
electrónico) sus respuestas en un archivo PDF (Portable Document Format)
Fecha de entrega: Domingo 25 de octubre de 2015.
La integral
Zb
s(ω) =
a) Considere el proceso estocástico dado por
Xt (ω)dt
Xt = a + bt
a
del PE Xt es una v.a. y su valor s(ω) para un ω especı́fico corresponde al área bajo la
curva Xt en el intervalo (a, b). Por linealidad (como integral de Riemann) se tiene que
Zb
ηs = E {s} =
Zb
E {Xt (ω)} dt =
a
η(t)dt
a
I9880 – Estadı́stica y Procesos Estocásticos – Ingenierı́a Robótica.
Depto. de Cs. Computacionales, DIVEC, CUCEI, UdeG.
en donde a ∼ Exp(5) es independiente de b ∼ Exp(7), para t ∈ IR+ .
1) ¿Qué tipo de PE es?, en tiempo contı́nuo, de estado discreto, ¿cómo se clasifica?
2) Calcule η(t), R(t1 , t2 ) y C(t1 , t2 ). 3) Tiene incrementos independientes 4) Tiene
incrementos estacionarios. 5) Obtenga una representación gráfica de una realización
de Xt .
Introducción a los Procesos Estocásticos
Laura E. Cortés N. – Rubén Sánchez G.
Actividad 9, pág. 3 de 3
b) Sea ω una v.a.discreta, distribuida como se muestra en la siguiente tabla.
w
−1
0
1
p(ω = x)
0.3
0.4
0.3
y sea {Xn : n = 0, 1, . . .} el proceso estocástico dado por
Xn+1 = Xn + ω
con X0 = 0.1) Escriba la clasificación de este PE.2) Dibuje tres trayectorias del
proceso para n = 15. 3) Calcule η(t), R(t1 , t2 ) y C(t1 , t2 ). 4) Tiene incrementos
independientes 5) Tiene incrementos estacionarios.
c) Sea {Xn : n = 0, 1, . . .} una caminata aleatoria simple sobre el conjunto de números
enteros Z que evoluciona de acuerdo a la siguiente regla
p si j = i + 1,
P (Xn+1 = j|Xn = i) =
q si j = i − 1,
0 en otro caso.
1) ¿Qué tipo de PE es? 2) Obtenga una representación gráfica para n = 10 y p = 0.11,
sabiendo que p + q = 1. 3) Calcule EXn para n ≥ 0. 4) Calcule V ar(Xn ) para n ≥ 0
d) Considere el PE normal Xt con
η(t) = 7
y
t2 −t1
C(t1 , t2 ) = 3e−
/5
1) Obtenga X3 .5 2) Calcule p(|X1 0 − X3 .5|) 3) Obtenga la representación gráfica de
una trayectora. 4) Grafique la densidad de probailidad de X3 . 5) Tiene incrementos
independientes.
Bibliografı́a
[1] Papoulis, A. & Pillai, S. U. (2002) Probability, Random Variables and Stochastic
Processes, McGraw−Hill, Inc.
[2] Kannan, D. (1979) An introduction to stochastic processes, Elsevier North Holland,
Inc.
I9880 – Estadı́stica y Procesos Estocásticos – Ingenierı́a Robótica.
Depto. de Cs. Computacionales, DIVEC, CUCEI, UdeG.
Introducción a los Procesos Estocásticos
Laura E. Cortés N. – Rubén Sánchez G.