transformaciones lineales - departamento de curso basico
Anuncio

UNIVERSIDAD MAYOR DE SAN ANDRÉS
FACULTAD DE INGENIERIA
INGENIERIA INDUSTRIAL
DEPARTAMENTO DE CURSO BÁSICO
EL CÁLCULO SUPERIOR
EN EL ENTORNO MATLAB
• APLICACIONES
AL
ALGEBRA
LINEAL
(CONTINUACION)
o ESPACIOS VECTORIALES
o PRODUCTO INTERIOR
o COMBINACION LINEAL
o TRANSFORMACIONES LINEALES
o AUTOVALORES Y AUTOVECTORES
Mg. Sc. Ing. Rafael Valencia Goyzueta
PERIODO ACADEMICO 2011
TRANSFORMACIONES LINEALES
Las transformaciones lineales son una clase especial de funciones entre espacios vectoriales, aquellas que
preservan las operaciones del espacio vectorial.
Serán útiles los siguientes comandos:
FUNCION
Z=null(A,’r’)
Z=null(A)
Q=orth(A)
[E,base]=RREF(A)
SIGNIFICADO
Devuelve una base estándar para el espacio nulo obtenida a partir de la
reducción de filas A*Z es un estimado de la nulidad de A
Da una Base ortonormal del núcleo de A (Z’Z=I). El número de columnas de Z es
la nulidad de A
Da una base ortonormal para el rango de A (Q’Q=I). Las columnas de Q generan
el mismo espacio que las columnas de A, y el número de columnas de Q es el
rango de A
Devuelve la forma escalonada de A y una posible base del espacio de columnas
de A
⎡x⎤
⎡ 4 1 −2 − 3 ⎤ ⎢ ⎥
⎢
⎥ y
4
3
Sea T : IR → IR tal que T ( x, y , z , w ) = 2 1 1 −4 ⎢ ⎥ . Hallar una base para el núcleo de T y su
⎢
⎥⎢z⎥
⎢⎣ 6 0 −9 9 ⎥⎦ ⎢ ⎥
⎣ w⎦
r
dimensión. Determinar la imagen del vector v = ( −1, 2, 4,3) . Hallar una base para la imagen de T y su
dimensión.
Definimos la matriz A
Hallamos la base del núcleo
Definimos la transpuesta del
vector de origen
Hallamos la imagen del vector
v = ( −1, 2, 4, 3)
T = ⎡⎣3 × 4 ⎤⎦ ⎡⎣ 4 × 1⎤⎦ = [3 × 1]
Para la base de la imagen.
Escalonamos la transpuesta de
la matriz A
>> A=[4 1 -2 -3;2 1 1 -4;6 0 -9 9]
A=
4 1 -2 -3
2 1 1 -4
6 0 -9 9
>> B=null(A,'r')
B=
1.5000
-4.0000
1.0000
0
>> v=[-1 2 4 3]'
v=
-1
2
4
3
>> imagen=A*v
imagen =
-19
-8
-15
>> rref(A')
ans =
1 0 0
0 1 0
0 0 1
0 0 0
⎧⎛ 3
⎞⎫
BN = ⎨⎜ , −4,1⎟ ⎬
⎠⎭
⎩⎝ 2
Nulidad = 1
vimagen = ( −19, −8, −15 )
BIMG = {(1, 0, 0 ) , ( 0,1, 0 ) , ( 0, 0,1)}
Rango = 3
TRABAJO PRÁCTICO
TRANSFORMACIONES LINEALES CON MATLAB
1. Dado
T : IR 5 → IR 6 una aplicación lineal tal que:
T ( 0, 2,1, 0,5 ) = (1, 2,1, 7,1, −1)
T (1, 2, 0,1,1) = ( 3,5,1, 4, 2, 0 )
T ( 0, 0,1, 2, −2 ) = ( 3,3,1,1, 2, 2 ) .
T (1, −2,1, 2, 0 ) = ( 4,1,8,1,5, 2 )
a) Hallar
la
imagen
de
T (1,1,1,1,1) = (1,3,5, −2, 4,1)
r
r
los vectores:
v1 = ( 2, 2,3,5, 4 ) ∧ v 2 = ( 4, 2,3,5,3)
tal
que
T ( x, y ) = ( x + y , x − y ) .
b) Hallar una base para el núcleo y una base para la imagen de la transformación
2.n Dada la transformación lineal
T : IR 5 → IR 4 definida por T ( x, y , z , w, u ) = ( x − y , y − z , z − w, w − u )
determinar la matriz asociada a T respecto de las bases.
•
B1 = {(1, 2, 3, 4, 5 ) , ( 0,1, 2,3, 4 ) , ( 0, 0,1, 2, 3) , ( 0, 0, 0,1, 2 ) , ( 0, 0, 0, 0,1)}
B2 = {(1,1,1,1) , (1, 2,1, 2 ) , ( 0, 0, 0,1) , (1, 3, −1, 3)} .
•
⎡1 0 0 2⎤
3
⎢
⎥
∧ IR 4 y las bases
3.y Sea la matriz A = 2 0 3 5 y las bases de IR
⎢
⎥
⎢⎣ 5 −2 1 1 ⎥⎦
•
B1 = {(1,1,1,1) , (1,1,1, 0 ) , (1,1, 0, 0 ) , (1, 0, 0, 0 )}
B2 = {(1, 2, 4 ) , ( 0, 2,1) , ( 3, 2, 3)} .
•
T : IR 4 → IR 3
4
3
4
3
b) Determinar la transformación lineal T : IR → IR , IR considera B1 , IR considera la base
a) Determinar la transformación lineal
canónica.
4.nDada la TL T
: IR 5 → IR 5 definida por T ( x, y , z , w, u ) = ( 2 x − y, 3 y + 4 w, z − y + u , x + u , 2u )
c) Hallar una base para el núcleo y una base para la imagen
−1
d) Determinar la transformación lineal G que tiene como matriz asociada A respecto de las bases.
•
B1 = (1,1,1,1,1) , (1,1,1,1, 0 ) , (1,1,1, 0, 0 ) , (1,1, 0, 0, 0 ) , (1, 0, 0, 0, 0 )
•
B2
{
}
= {( 2,1, 0,1, 0 ) , (1, 2, 0, 3, 0 ) , ( 0,1, 3,1, 0 ) , (1,1,1, 0, 0 ) , ( 0, 0, 0, 0,1)} .
2.n Dada la transformación lineal
T : IR 4 → IR 3 definida por la multiplicación de la matriz A
a) Determinar cual de los siguientes vectores están en el núcleo de T
⎛ 3⎞
⎛0⎞
⎜ ⎟
⎜ ⎟
1
−8
v1 = ⎜ ⎟ ∨ v2 = ⎜ ⎟ ∧
⎜ 2⎟
⎜0⎟
⎜ ⎟
⎜ ⎟
⎝0⎠
⎝ −8 ⎠
⎡ 4 1 −2 −3⎤
A = ⎢⎢ 2 1 1 −4 ⎥⎥
⎢⎣ 6 0 −9 9 ⎥⎦
b) Encontrar además una base para el núcleo y la imagen e indicar sus dimensiones.
MODIFICACION DE FIGURAS Y CUERPOS POR MEDIO DE TRANSFORMACIONES LINEALES
Modificación de figuras en el plano
Los vectores y matrices se relacionan a través de la multiplicación matricial. Si A es una matriz fija de m × n , a
ur
r
cualquier vector de n ×1 le podemos asociar un vector y = A x
principal ejemplo de una transformación lineal.
de
m ×1 . Y esta correspondencia es el
Las transformaciones lineales desempeñan un papel muy importante en muchas áreas de la ciencia e ingeniería
y de la vida diaria, por ejemplo en el procesamiento de imágenes y gráficos en computadora.
Supongamos que un dibujante emplea computadoras y álgebra lineal para transformar los dibujos.
Supongamos que trata de dar la sensación de movimientos a la primera imagen estirándola horizontalmente
para llegar a la segunda imagen. Si el estiramiento necesario a lo largo del eje x ’s es del 100%. ¿cómo puede
modelarlo matemáticamente y hacer que la computadora trace la imagen deseada?. El método debería ser
independiente de la imagen ¿verdad?….
¿Se le ocurre como resolver el problema?…..
Un hecho importante de las transformaciones lineales es que ellas están completamente determinadas por el
efecto sobre los vectores de una base. Si se conoce el efecto de una transformación lineal sobre los vectores de
la base, entonces se conoce el efecto sobre cualquier otro vector.
Sigamos con nuestra bicicleta. Supongamos que queremos pasar de la figura 1 a la figura 3. Podemos ver esta
relación de otra forma, definiendo una función de IR
2
en IR
2
que “transforma” el vector
( x, y )
en el vector
( 12 x, y ) , es decir:
Sea
T:IR 2 → IR 2 una transformación lineal y supongamos que:
T (1, 0 ) = (1, 0 ) ∧ T ( 0,1) = ( 12 ,1)
Queremos hallar T ( x, y ) para cualquier (x,y)∈ℜ
( x, y ) ∈ IR . Como T
( x, y ) = x (1, 0 ) + y ( 0,1)
2
2
Tomando transformaciones
(1)
es lineal tenemos
T ( x, y ) = T ⎡⎣ x (1, 0 ) + y ( 0,1) ⎤⎦ = xT (1, 0 ) + yT ( 0,1)
Por las condiciones dadas en (1)
T ( x, y ) = x T (1, 0 )
(1,0 )
⎛1 ⎞
⎜ ,1⎟
⎠
+ y T ( 0,1) ⎝ 2
= x (1, 0 ) + y ( 12 ,1)
De donde se tiene:
1
1
1
⎛
⎞ ⎡ x + 2 y ⎤ ⎡1 2 ⎤ ⎡ x ⎤
T ( x, y ) = ⎜ x + y , y ⎟ = ⎢
=
⎥ ⎢
⎥⎢ ⎥
2
⎝
⎠ ⎣ y ⎦ ⎣0 1⎦ ⎣ y ⎦
Es una transformación lineal que satisface (1). Esta transformación se llama deslizamiento a lo largo del eje x ’s
(cada punto se mueve a lo largo de la dirección x ’s una cantidad proporcional a la distancia del eje x ’s)
Esta función preserva las operaciones del
r r
r r
r
r
r
r
T u + v = A u + v = A u + A v = T u +T v
(
)
(
)
, +, ⋅) en el sentido de que
r
r
r
r
y T k ⋅ u = A k ⋅ u = k A ⋅ u = k ⋅ T u . Estas dos
espacio vectorial
() () () ()
propiedades caracterizarán a las transformaciones lineales.
( IR
2
( ) ( ) (
)
()
Las siguientes son matrices asociadas a algunas transformaciones respecto de la base canónica de IR
TRANSFORMACION
MATRIZ ESTANDAR
Sea la transformación
lineal el cual representa un
cuadrado unitario:
⎡1 0 ⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣0 1 ⎦ ⎣ y ⎦
⎡1
T ( x, y ) = ⎢
⎣0
Reflexión sobre el eje x.
EFECTOS SOBRE EL CUADRADO UNITARIO
0⎤ ⎡ x ⎤
-1 ⎥⎦ ⎢⎣ y ⎥⎦
y
y
⎡ −1 0 ⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣ 0 1⎦ ⎣ y ⎦
Reflexión sobre el eje y.
1
1
1
Reflexión
origen.
respecto
al
Contracción o compresión
horizontal.
Expansión horizontal.
Expansiónvertical.
-1
x
⎡ K 0⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣ 0 1⎦ ⎣ y ⎦
0 < k <1
y
y
1
1
1 x
Contracción o compresión
vertical.
x
⎡ −1 0 ⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣ 0 −1⎦ ⎣ y ⎦
⎡ K 0⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣ 0 1⎦ ⎣ y ⎦
k >1
⎡1 0 ⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣0 k ⎦ ⎣ y ⎦
0 < k <1
⎡1 0 ⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣0 k ⎦ ⎣ y ⎦
k >1
2
k x
y
Trasquilado horizontal o
deslizamiento a lo largo
del eje x.
⎡1 k ⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣0 1 ⎦ ⎣ y ⎦
k <0
y
1
1
Trasquilado horizontal o
deslizamiento a lo largo
del eje x.
x
y
⎡ 1 0⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣k 1⎦ ⎣ y ⎦
k <0
1
1
Proyección sobre el eje x.
⎡1 0 ⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣0 0⎦ ⎣ y ⎦
y
y
1
1
⎡0 0⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣0 1 ⎦ ⎣ y ⎦
⎡cos θ
T( x , y ) = ⎢
⎣ senθ
− senθ ⎤ ⎡ x ⎤
cos θ ⎥⎦ ⎢⎣ y ⎥⎦
1 x
x
y
y
1
1
1
Rotación
en
sentido
contrario
a las manecillas del reloj
por un ángulo .
1
x
⎡ 1 0⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣k 1⎦ ⎣ y ⎦
k >0
1
Proyección sobre el eje y.
x
k
1
Trasquilado
vertical
o
deslizamiento a lo largo
del eje y.
1 x
⎡1 k ⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣0 1 ⎦ ⎣ y ⎦
k >0
y
Trasquilado
vertical
o
deslizamiento a lo largo
del eje y.
k
x
1
x
Modificación de figuras y cuerpos en el espacio
Al igual que en el plano, se puede ver en el espacio tridimensional, los efectos que produce una determinada
transformación lineal sobre una figura o un cuerpo.
Para realizar la grafica d figuras o cuerpos se puede usar el comando plot3
COMANDO
ACLARACIÓN
Dados los vectores
y Z = [ z1
X = [ x1
z3 L z n ]
z2
( x3 , y3 , z3 ) ,…, ( xn , yn , zn )
>> plot3(X,Y,Z)
x2
dibuja
x3 L xn ] , Y = [ y1
los
puntos
y2
y3 L yn ]
( x1 , y1 , z1 ) , ( x2 , y2 , z2 ) ,
y los une con un segmento de recta. De esto se deduce
que el vector X esta formado por las primeras componentes de tales puntos y el
vector Y por las segundas componentes y el vector Z por las terceras
componentes.
Las siguientes son matrices asociadas de algunas transformaciones lineales en el espacio respecto de la base
canónica de IR
3
Rotación alrededor del eje x un ángulo
θ
Rotación alrededor del eje y un ángulo θ
Rotación alrededor del eje
z un ángulo θ
Expansión para un factor k > 1
Contracción para un factor 0 < k
Proyección sobre el plano
Proyección sobre el plano
<1
IP : XY
IP : YZ
Reflexión respecto del eje x
Reflexión respecto del plano
IP : XZ
0
0 ⎤ ⎡ x⎤
⎡1
⎢
T ( x, y, z ) = ⎢0 cos θ − senθ ⎥⎥ ⎢⎢ y ⎥⎥
⎢⎣0 senθ cos θ ⎥⎦ ⎢⎣ z ⎥⎦
⎡cos θ 0 − senθ ⎤ ⎡ x ⎤
T ( x, y, z ) = ⎢⎢ 0
1
0 ⎥⎥ ⎢⎢ y ⎥⎥
⎢⎣ senθ 0 cos θ ⎥⎦ ⎢⎣ z ⎥⎦
⎡cos θ − senθ 0 ⎤ ⎡ x ⎤
T ( x, y, z ) = ⎢⎢ senθ cos θ 0 ⎥⎥ ⎢⎢ y ⎥⎥
⎢⎣ 0
0
1 ⎥⎦ ⎢⎣ z ⎥⎦
⎡k
T ( x, y, z ) = ⎢⎢ 0
⎢⎣ 0
⎡1
T ( x, y, z ) = ⎢⎢0
⎢⎣0
0 0⎤ ⎡ x ⎤
k 0 ⎥⎥ ⎢⎢ y ⎥⎥
0 k ⎥⎦ ⎢⎣ z ⎥⎦
0 0⎤ ⎡ x ⎤
1 0 ⎥⎥ ⎢⎢ y ⎥⎥
0 0 ⎥⎦ ⎢⎣ z ⎥⎦
⎡0
T ( x, y, z ) = ⎢⎢0
⎢⎣0
⎡1
T ( x, y, z ) = ⎢⎢0
⎢⎣0
0 0⎤ ⎡ x ⎤
1 0 ⎥⎥ ⎢⎢ y ⎥⎥
0 1 ⎥⎦ ⎢⎣ z ⎥⎦
0 0 ⎤ ⎡ x⎤
−1 0 ⎥⎥ ⎢⎢ y ⎥⎥
0 −1⎥⎦ ⎢⎣ z ⎥⎦
⎡1 0 0 ⎤ ⎡ x ⎤
T ( x, y, z ) = ⎢⎢0 −1 0 ⎥⎥ ⎢⎢ y ⎥⎥
⎢⎣0 0 1 ⎥⎦ ⎢⎣ z ⎥⎦
Ejemplos (transformación lineal en el plano y en el espacio):
Para el triangulo de vértices P(0,0) Q(2,5) R(6,3) realizar una expansión a lo largo del eje x con un factor
de escala k = 3 .
Solución. Sea la transformación lineal
T : IR 2 → IR 2 tal que T ( x, y ) = ( 3 x, y ) . La matriz asociada a esta
⎡3 0⎤ ⎡ x ⎤
⎥⎢ ⎥
⎣0 1 ⎦ ⎣ y ⎦
transformación respecto de la base canónica de IR es: T ( x, y ) = ⎢
2
Se introducen los vectores P, Q, R expresados
como vectores columna
Se construye la matriz T cuyas columnas son
los vectores P, Q, R Esta matriz tiene como
primera fila a las absisas de los vértices y como
segunda fila a las ordenadas
Se forman los vectores x y y de las abscisas y
ordenadas de los vértices y se realiza la grafica
del triangulo
Se realiza el producto A por T para obtener las
imágenes
Se construyen los vectores x
1
y y
1
de las
abscisas y las ordenadas de las imágenes y se
realiza la grafica en una misma figura
>> P=[0 0]';
>> Q=[2 5]';
>> R=[6 3]';
>> T=[P Q R P]
T=
5
4.5
4
3.5
3
2.5
0 2 6 0
0 5 3 0
>> x=T(1,:);
>> y=T(2,:);
>> plot(x,y)
>> A=[3 0;0 1]
A=
3 0
0 1
>> Im=A*T;
>> hold on
>> x1=Im(1,:);
>> y1=Im(2,:);
>> plot(x1,y1,'g')
2
1.5
1
0.5
0
0
1
2
3
4
5
6
5
4.5
4
3.5
3
2.5
2
1.5
1
0.5
0
0
2
4
6
8
10
Para el mismo triangulo realizar una expansión a lo largo del eje y con un factor de escala
Solución. La matriz asociada a la >> P=[0 0]';
10
transformación es:
>> Q=[2 5]';
9
>> R=[6 3]';
8
>> T=[P Q R P];
⎡1 0 ⎤ ⎡ x ⎤
7
>>
x=T(1,:);
T ( x, y ) = ⎢
⎥
⎢
⎥
6
>> y=T(2,:);
⎣0 2⎦ ⎣ y ⎦
5
>> plot(x,y) ;
4
>> A=[1 0;0 2];
3
>> Im=A*T;
2
>> hold on;
1
>> x1=Im(1,:);
0
0
1
2
3
4
>> y1=Im(2,:);
>> plot(x1,y1,'r')
>> grid
12
14
16
18
k = 2.
Realizar el trasquilado horizontal o deslizamiento a lo largo del eje x con un factor de escala
Solución. La matriz asociada a la >> P=[0 0]';
transformación es:
>> Q=[2 5]';
5
>> R=[6 3]';
4.5
>> T=[P Q R P];
4
⎡1 −5⎤ ⎡ x ⎤
>>
x=T(1,:);
T ( x, y ) = ⎢
3.5
⎥⎢ ⎥
>> y=T(2,:);
3
⎣0 1 ⎦ ⎣ y ⎦
>> plot(x,y) ;
2.5
k <0
>> A=[1 -5;0 1];
2
>> Im=A*T;
1.5
k = −5
>> hold on;
1
0.5
>> x1=Im(1,:);
0
>> y1=Im(2,:);
-25
-20
-15
-10
-5
0
>> plot(x1,y1,'r')
>> grid
5
6
k = −5
5
10
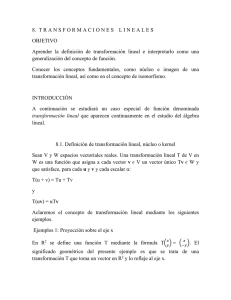
Realizar una rotación de 45ª a la porción de la parábola
⎡ cos θ
Solución. La matriz asociada a la TL es: T ( x, y ) = ⎢
⎣ − senθ
Dibujamos la parábola original
La matriz asociada
Forma la matriz cuya primera fila esta
compuesta por las abscisas y la
segunda fila por las ordenadas de los
puntos de la parábola
Calcula la imagen de los puntos
y = x 2 + 2 en el intervalo [ −2, 2] .
⎡ cos π
senθ ⎤ ⎡ x ⎤
4
⇒ T ( x, y ) = ⎢
⎢ − sen π
cos θ ⎥⎦ ⎢⎣ y ⎥⎦
⎢⎣
4
π
sen ⎤ ⎡ x ⎤
4⎥
π ⎥ ⎢ y⎥
cos ⎥ ⎣ ⎦
4⎦
>> x=-2:.1:2;
>> y=4*x.^2+2;
>> plot(x,y);
>> A=[cos(pi/4) sin(pi/4) ;-sin(pi/4) cos(pi/4)];
18
>> puntos=[x;y];
16
14
12
>> puntosIm=A*puntos;
>> hold on;
Forma el vector de abscisas y
coordenadas de los puntos de la
imagen
>> x1=puntosIm(1,:);
>> y1=puntosIm(2,:);
Grafica la parábola rotada
>> plot(x1,y1,'r')
>> grid
10
8
6
4
2
0
-2
0
2
4
6
8
10
12
14
16
3
3
Dado el tetraedro de vértices P=(-1,6,0), Q=(0,2,0),R =(2,4,0), y S=(0,4,5). Aplicar la TL T : IR → IR
tal que T ( x, y, z ) = (5 x,5 y,5 z ) (La transformación T produce una expansión a lo largo del eje y )
EXPANSION POR UN FACTOR
>> T=[-1 0 2 -1 0 2 0 0 -1 ;6 2 4 6 4 4 2 4 6 ;0 0 0 0 5 0 0 5 0];
>> x=T(1,:);y=T(2,:);z=T(3,:);
>> plot3(x,y,z,'b')
>> title('EXPANSION POR UN FACTOR');
>> A=[2 0 0;0 2 0;0 0 2];
>> pt=A*T;
>> hold on
>> xt=pt(1,:);yt=pt(2,:);zt=pt(3,:);
>> plot3(xt,yt,zt)
>> grid
10
8
6
4
2
0
15
4
10
2
5
0
0
-2
Dado el triangulo de vértices P(2,3,-1) Q(5,0,-2) R(4,-2,0) aplique las siguientes transformaciones:
Solución. La matriz asociada a
la transformación es:
⎡1 0 0 ⎤ ⎡ x ⎤
T ( x, y, z ) = ⎢⎢0 1 0 ⎥⎥ ⎢⎢ y ⎥⎥
⎢⎣0 0 −1⎥⎦ ⎢⎣ z ⎥⎦
T : IR 3 → IR 3 tal que T ( x, y , z ) = ( x, y , − z ) .
>> P=[2 3 -1]';
>> Q=[5 0 -2]';
>> R=[4 -2 0]';
>> T=[P Q R P];
>> x=T(1,:);
>> y=T(2,:);
>> z=T(3,:);
>> plot3(x,y,z);
>> A=[1 0 0;0 1 0;0 0 -1];
>> Im=A*T;
>> hold on;
>> x1=Im(1,:);
>> y1=Im(2,:);
>> z1=Im(3,:);
>> plot3(x1,y1,z1,'r')
>> xlabel('eje x ');
>> ylabel('eje y ');
>> zlabel('eje z ');
>> grid
2
1
eje z
Simetría respecto del plano XY definida por
0
-1
-2
4
5
2
4
0
eje y
3
-2
2
eje x
Solución. La matriz asociada a
la transformación es:
⎡ −1 0 0 ⎤ ⎡ x ⎤
T ( x, y, z ) = ⎢⎢ 0 −1 0 ⎥⎥ ⎢⎢ y ⎥⎥
⎢⎣ 0 0 −1⎥⎦ ⎢⎣ z ⎥⎦
T : IR 3 → IR 3 tal que T ( x, y , z ) = ( − x, − y, − z ) .
>> P=[2 3 -1]';
>> Q=[5 0 -2]';
>> R=[4 -2 0]';
>> T=[P Q R P];
>> x=T(1,:);
>> y=T(2,:);
>> z=T(3,:);
>> plot3(x,y,z);
>> A=[-1 0 0;0 -1 0;0 0 -1];
>> Im=A*T;
>> hold on;
>> x1=Im(1,:);
>> y1=Im(2,:);
>> z1=Im(3,:);
>> plot3(x1,y1,z1,'r')
>> xlabel('eje x ');
>> ylabel('eje y ');
>> zlabel('eje z ');
>> grid
Simetría respecto del eje Z definida por
2
1
eje z
Simetría respecto del origen definida por
0
-1
-2
4
5
2
0
0
-2
-4
eje y
-5
eje x
T : IR 3 → IR 3 tal que T ( x, y , z ) = ( − x, − y , z ) .
Solución. La matriz asociada a
la transformación es:
eje z
>> P=[2 3 -1]';
>> Q=[5 0 -2]';
>> R=[4 -2 0]';
>> T=[P Q R P];
⎡ −1 0 0 ⎤ ⎡ x ⎤
>> x=T(1,:);
T ( x, y, z ) = ⎢⎢ 0 −1 0 ⎥⎥ ⎢⎢ y ⎥⎥
>> y=T(2,:);
0
>>
z=T(3,:);
⎢⎣ 0 0 1 ⎥⎦ ⎢⎣ z ⎥⎦
-0.5
>> plot3(x,y,z);
>> A=[-1 0 0;0 -1 0;0 0 1];
-1
>> Im=A*T;
-1.5
>> hold on;
>> x1=Im(1,:);
-2
4
>> y1=Im(2,:);
2
0
>> z1=Im(3,:);
-2
>> plot3(x1,y1,z1,'r')
eje y
>> xlabel('eje x ');
>> ylabel('eje y ');
>> zlabel('eje z ');
>> grid
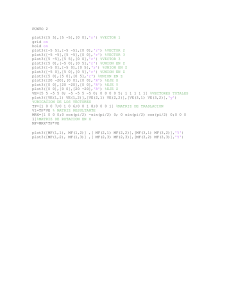
10. Para la figura mostrada en el plano (para esto considere usted las dimensiones
mas adecuadas). Realizar un programa en Matlab el cual permita aplicarle cualquier
transformación lineal ingresando desde el teclado la matriz asociada.
Creamos
el
programa
transformacion con extensión m.
que permite aplicar diversas
transformaciones ingresando la
matriz asociada desde el teclado
5
0
-4
-5
eje x
function M=transformacion(A) % linea que define la funcion
%________________________________________________________
% Archivo de funcion que permite aplicar diversas transformaciones %
lineales a
% una figura dada, ingresando la matriz asociada desde el teclado
%________________________________________________________
disp(' ______________________________________________________')
disp('| Archivo de funcion que permite aplicar diversas transformaciones |')
disp('| lineales a una figura dada, ingresando la matriz asociada |')
disp('| desde el teclado |')
disp(' _____________________________________________________')
A=input('Ingrese la matriz asociada entre corchetes a la TL lineal de R2 en R2: ')
dibuja la cara
t=-3:.01:3;x=cos(t)+1;y=sin(t)+1;
plot(x,y,'r')
grid
axis equal
hold on
x1=[4 1 0 1 1 1 -1 1 3 4];y1=[-2 0 -2 -3 0 -4 -8 -4 -5 -8];
plot(x1,y1,'r')
% forma la matriz de puntos
Pcara=[x;y];Pcuerpo=[x1;y1];
dibuja el cuerpo
aplica una transformacion lineal de
R2 en R2 cuya matriz asociada es
la ingresada A
Imcara=A*Pcara;
Imcuerpo=A*Pcuerpo;
xim=Imcara(1,:);yim=Imcara(2,:);x1im=Imcuerpo(1,:);y1im=Imcuerpo(2,:);
plot(xim,yim,x1im,y1im,'b')
hold off
Llamamos
al
programa
e
introducimos
la
matriz
de
transformación y se de despliega la
figura según su matriz asociada.
>> transformación
Ingrese la matriz asociada entre corchetes a la TL de R2 en R2:
⎡0.5 0 ⎤ ⎡ x ⎤
T ( x, y ) = ⎢
⎥⎢ ⎥
⎣ 0 0.5⎦ ⎣ y ⎦
Ingrese la matriz asociada entre corchetes a la TL de R2 en R2: [0.5 0;0 0.5]
⎡ −1
T ( x, y ) = ⎢
⎣0
⎡1
T ( x, y ) = ⎢
⎣5
0 ⎤ ⎡ x⎤
−1⎥⎦ ⎢⎣ y ⎥⎦
Ingrese la matriz asociada entre corchetes a la TL de R2 en R2: [-1 0;0 -1]
0⎤ ⎡ x ⎤
1 ⎥⎦ ⎢⎣ y ⎥⎦
Ingrese la matriz asociada entre corchetes a la TL de R2 en R2: [1 0;2 1]
Figura 3
Figura 2
Figura1
1
8
6
6
4
4
2
0
-1
-2
-3
-4
2
0
0
-2
-2
-4
-4
-6
-5
-6
-8
-6
-7
-8
-4
-2
0
Dada la helice
2
4
-8
-10
6
-10
-8
-6
-4
-2
0
2
4
6
8
10
-8
-6
-4
-2
0
2
4
6
8
10
ur
f ( t ) = ( sen ( t ) , cos ( t ) , t ) aplique la siguiente transformación dilatación T : IR 3 → IR 3
tal que T ( x, y , z ) = ( 2 x, 2 y , 2 z ) .
⎡2
Solución. La matriz asociada a la transformación es: T ( x, y, z ) = ⎢ 0
⎢⎣ 0
Grafica la helice
Aplicamos
la
transformación que la
expande un factor K=2
en todas las direcciones
>> t = 0:pi/50:10*pi;
>> x=sin(t);y=cos(t);z=t;
>> plot3(x,y,z,'m');
>> title('HELICE')
>> grid
>> hold on
>> puntos=[x;y;z];
>> M=[2 0 0;0 2 0;0 0 2];
>> Im=M*puntos;
>> xim=Im(1,:);yim=Im(2,:);zim=Im(3,:);
>> plot3(xim,yim,zim,'r')
0 0⎤ ⎡ x ⎤
2 0⎥ ⎢ y ⎥
0 2⎥
⎦ ⎢⎣ z ⎥⎦
HELICE
80
60
40
20
0
2
1
2
1
0
0
-1
-1
-2
-2
TRABAJO PRÁCTICO
MODIFICACION DE FIGURAS Y CUERPOS POR MEDIO DE TL CON MATLAB
1. Dibuje el cuadrilátero de vértices (0.1), (2,4) (4,4), (6,1) y luego aplique a este las siguientes transformaciones
lineales.
a) Expansión a lo largo del eje Y con un factor
k =5
b) Contracción en ambas direcciones con un factor de
k=
1
2
c) Reflexión respecto al eje x
2. Dibuje la figura de vértices (2,-2), (2,7), (4,5), (2,3) y aplique a estas las siguientes transformaciones lineales
a) Expansión en ambas direcciones para un factor de
b) Reflexión respecto al eje y
k =4
o
c) Rotación en sentido positivo con centro en el origen y un ángulo de 60
d) Reflexión respecto del origen y luego una expansión a lo largo del eje x con un factor
k =3
3. Dibuje la figura rellena de vértices (2,3), (3,1), (6,1), (7,3), (6,6), (4,3), (3,6) y aplique a esta las siguientes
transformaciones lineales:
a)
T : IR 2 → IR 2 tal que T ( x, y ) = ( x + y , x − y ) .
b)
T : IR 2 → IR 2 tal que T ( x, y ) = ( 2 x − 3 y, 5 y ) .
4. Al triangulo de vértices (2,3,-1), (5,0,-2), (4,-2,0) y aplique las siguientes transformaciones lineales:
a) Simetría respecto al plano
IP : XY definida por T : IR 3 → IR 3 tal que T ( x, y , z ) = ( x, y , − z ) .
b) Simetría respecto del origen, definidas por
c) Simetría respecto del eje Z definida por
T : IR 3 → IR 3 tal que T ( x, y, z ) = ( −3 x, −3 y, − z ) .
1 ⎞
⎛
T : IR 3 → IR 3 tal que T ( x, y, z ) = ⎜ − x, − y, z ⎟ .
2 ⎠
⎝
5. Dada la figura de vértices (2,0,0), (1,5,3), (0,-3,4), (-6,5,3) Hallar su imagen respecto de la transformación
lineal
T : IR 3 → IR 3 tal que T ( x, y , z ) = ( 2 x, 2 y, 2 z ) y a la figura resultante aplicar la transformación lineal
T : IR 3 → IR 3 tal que T ( x, y , z ) = ( x + y , y , x + y + z ) ..
6. Dibujar el tetraedro de vértices (2,4,0), (-1,6,0), (0,2,0), (0,4,5) y aplicar las siguientes transformaciones
lineales:
z con un ángulo de 60o
o
b) Rotación alrededor del eje x un ángulo 30
o
c) Rotación alrededor del eje y un ángulo de 45
a) Rotación alrededor del eje
7. Dibujar el triangulo de vértices (3,0,2), (1,-2,1), (0,1,3) y obtener su
proyección
a) Sobre el plano XY
b) Sobre el plano XZ
c) Sobre el plano YZ
Rellenar cada una de las figuras proyectadas con un distinto color como se
muestra en la figura de ejemplo.
;
8. Dibujar la carita de la figura (para esto considere usted las dimensiones mas
adecuadas). y a esta aplicarle las siguientes transformaciones lineales:
a) Simetría respecto al eje y
b) Simetría respectó al eje x
c) Trasquilado respecto al eje x para un factor
k =5
9. Dibujar la casita de la figura y a esta aplicarle las siguientes transformaciones
lineales:
30o
o
b) Rotar la figura en sentido negativo un ángulo de 90
c) Simetría respecto al eje x
d) Simetría respecto al eje y
a) Rotar la figura en sentido positivo un ángulo de
e) Simetría respecto al origen
10. Para las figuras mostrada en el plano (para esto considere usted las dimensiones mas adecuadas). Realizar
un programa en Matlab el cual permita aplicarle cualquier transformación lineal ingresando desde el teclado la
matriz asociada.
(
11. Para la curva en el espacio f ( t ) = cos t , sent ,3t
le permita:
2
)
∧ t ∈ [ 0,10π ] . Aplicar una transformación lineal que
k =7
1
b) Contracción en todas las direcciones con un factor k =
3
12. Dibujar el cuadrado unitario definido por: D = [ 0,1] × [ 01] y luego aplicarle la transformación lineal,
a) Expandirse en todas las direcciones con un factor
explicando claramente el resultado obtenido:
a)
T : IR 2 → IR 2 tal que T ( x, y ) = ( 2 + x − 2 y ,1 + x + y ) . Y graficar.
b)
⎛ x− y x+ y⎞
T : IR 2 → IR 2 tal que T ( x, y ) = ⎜
,
⎟ . Y graficar.
2 ⎠
⎝ 2
13. Realizar una rotación de 90ª, una reflexión respecto del origen, un desplazamiento a lo largo del eje x con
un factor de escala k=10 a las siguientes curvas
a)
x2 y 2 = 9 ( x2 + y 2 )
b)
r = 7 ( 3 + cos t )
c)
f (t ) = ( 2 − cos t ,5 + sent )
14. Realizar una rotación de 45ª, una expansión en todas sus direcciones con un factor de escala de k=7, una
contracción en todas sus direcciones con un factor de escala k=-5 a las siguientes ecuaciones
a)
b)
8 x 2 + 15 y 2 + 5 z 2 = 102
f = ( t 4 − t 2 + 1, t , t 2 )