ALGORITMO DE RESOLUCIÓN DEL PROBLEMA CINEMÁTICO
MEDIANTE MÉTODOS COMPUTACIONALES
Objetivo: Dada la topología del mecanismo y las funciones conductoras de sus grados
de libertad, hallar las posiciones, velocidades y aceleraciones de cada sólido en un
intervalo t i , t f .
[
]
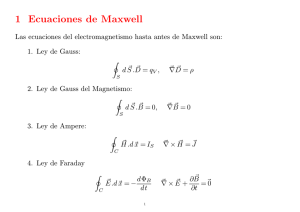
Definir un sistema de coordenadas global y los sistemas
locales fijados a cada uno de los sólidos del mecanismo
Definir las coordenadas generalizadas del sistema q , las
ecuaciones de restricción cinemática, y las funciones conductoras
Ensamblar las ecuaciones de posición : Φ ( q , t ) = 0 , las
⋅ q = − Φ t , y las de aceleración:
Φ q ⋅ q = −(Φ q ⋅ q ) q ⋅ q − 2Φ qt ⋅ q − Φ tt
ecuaciones de velocidad : Φ q
Estimar una solución
q̂ o , próxima a q o mediante
Incrementar t en ∆t . Usar como estimación
de la posición:
un método de ensamblaje inicial.
qˆ o ( t + ∆t ) = q o + q o ∆t + (1 / 2)qo ∆t 2
Aplicar el método de Newton-Raphson, para
obtener la solución exacta q o
q i +1 = q i −
Φ(q i )
Φ q (q i )
qo , t mediante
descomposición LU o Gauss Φ q ⋅ q = − Φ t , obteniendo q o
Resolver las ecuaciones de velocidad para
q o , q o , t mediante
= −(Φ q ⋅ q ) q ⋅ q − 2Φ qt ⋅ q − Φ tt
descomposición LU o Gauss Φ q ⋅ q
Resolver las ecuaciones de acelaración para
Obteniendo
qo
NO
¿Es t < t f ?
SI
FIN
 0
0