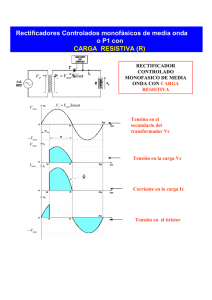
Rectificadores Controlados monofásicos de media onda o P1 con CARGA RESISTIVA (R) VP Vmax Vs = Vmax Senωt RECTIFICADOR CONTROLADO MONOFASICO DE MEDIA ONDA CON CARGA RESISTIVA Vs = Vmax Senωt Tensión en el secundario del transformador Vs − Vmax Vmax Tensión en la carga Vc I max Corriente en la carga Ic Tensión en el tiristor − V max Rectificadores Controlados monofásicos de media onda o P1 con CARGA RESISTIVA (R) Rectificadores monofásicos Región de funcionamiento. I La tensión de salida e intensidad poseen una sola polaridad. π 1 V V π ′ = U dc Vmax senωt dωt = max [− cosωt ]α = max (1 + cosα ) 2π α 2π 2π ∫ Para α=0° ′ = Vrms Para α=0° La tensión media en la carga se denomina Udc 1 2π π 2 ∫α (Vm Sen ω t ) dω t = U dc = V max π Vmax (π − α ) + 1 Sen (2α ) 2 2 π La tensión eficaz se denomina Vrms Tensión inversa soportada por el tiristor V rms = V max 2 π π = PIV = V max V max 2 2 Rectificadores Controlados monofásicos de media onda o P1 con CARGA INDUCTIVA (RL) VP RECTIFICADOR CONTROLADO MONOFASICO DE MEDIA ONDA CON CARGA INDUCTIVA (RL) Vs = Vmax Senωt VL i VR VS Para saber el instante en que se anula la corriente, es decir, el punto ωt2. ic R + L Operando: PARA ic =0 V ic = m Z di c = Vm Sen ω t dt α −ω t Q ( ) ( ) Sen ω t ϕ Sen α ϕ e − − − Sen (ω t 2 − ϕ ) = Sen (α − ϕ )e α −ω t 2 Q Rectificadores Controlados monofásicos de media onda o P1 con CARGA INDUCTIVA (RL) VP Vs = Vmax Senωt VL Rectificadores Controlados monofásicos de media onda o P1 con diodo volante y CARGA INDUCTIVA (RL) RECTIFICADOR CONTROLADO MONOFASICO DE MEDIA ONDA CON CARGA RL Y DIODO VOLANTE α pequeña π α grande V max 1 (1 + Cos α ) V dc′ = V Sen ω t d ω t = m ∫ 2π α 2π Rectificadores Controlados monofásicos de media onda o P1 con CARGA CARGA RLE RLE RECTIFICADOR CONTROLADO MONOFASICO DE MEDIA ONDA CON CARGA RLE m= E V max E V max λ = arcsen = arcsen ( m ) λ′ = π − λ Para que el TIRISTOR pase a conducción: E ≤ Vmax ⋅ senα → Vmax ⋅ senα − E ≥ 0 α ≥ arcsen(m) Cuando se produce el disparo se cumple: di V max ⋅ sen ω t − E = Ri c + L c dt Para ic=0 wt = wt1 α −ω t E Z Q E Vmax ic = − + − Sen(α − ϕ ) e Sen( ω t + ϕ ) + ⋅ R Z R V max Rectificadores Controlados polifásicos de media onda o Pq p = índice de pulsación de la tensión rectificada q = número de fases. p=q para rectificadores Pq Tensiones referidas al secundario: V S 1 = V max cos ω t 2π V S 2 = Vmax cos ω t − q 4π V S 3 = Vmax cos ω t − q cos(ω − 2π ) = VSq Vmax t 2π (q − 1) V S (q −1 ) = V max cos ω t − q El tiempo de conducción de cada tiristor será de T/q y el ángulo de conducción 2π/q, siempre que se suponga la corriente en la carga continuada. π ′ = U do q 2π q − +α ∫ π q +α V max ⋅ cos ω t d (ω t ) = π ⋅V max ⋅ sen π q q ′ = U do ⋅ cos α U do ⋅ cos α PUENTE RECTIFICADOR TRIFASICO TOTALMENTE CONTROLADO CON CARGA RESISTIVA α=30° 30°< α <150° LA CORRIENTE EN LA CARGA SERÁ CONTINUA LA CORRIENTE EN LA CARGA SERÁ DISCONTÍNUA Rectificadores Controlados trifásicos de media onda P3 CARGA Idc RECTIFICADOR CONTROLADO TRIFASICO DE MEDIA ONDA CON CARGA ALTAMENTE INDUCTIVA -Para α< 30°, la tensión en la carga será siempre positiva. -Para α>30° , la tensión en la carga se va a hacer negativa para unos fragmentos del periodo. Para 0°< α < 90° cuadrante (I) Para 90° < α < 180° cuadrante(IV) π V dc′ = 3 2π 3 − +α ∫ π 3 V max Cos ω t d ω t = +α O también: Vdc′ = 3 2π 3 3 V max Cos α = 0,827 V max Cos α = V dc Cos α 2π 5π +α 6 V ∫ π 6 +α max Sen ω t d ω t P3 con CARGA Idc + Diodo Volante CUADRANTE (I) Para eliminar la tensión negativa en la carga usaremos esta configuración con diodo volante. -Para α< 30°: V dc′ = 3 2π 5π +α 6 V ∫ π 6 max Sen ω t d ω t +α -Para 30° < α <150°: 3 V dc′ = 2π π V ∫ π 6 π p U do ≡ U do − U α 1 = ⋅ 2π / p π − 2 ∫π V p +α Sen ω t d ω t +α Cuando la conducción de los tiristores haga que la u'd sea negativa, el diodo volante conduce y bloquea al tiristor que conducía. Si u’d se hace negativa se verifica que: ' max m +α > 1 = ⋅ 2π / p π 2 π −α 0 ∫ α →→ α 0 ≥ π 2 − π p π V m ⋅ cos wt − ⋅ dwt = p ⋅ cos (wt ) ⋅ dwt = U do 1 − sen α − ⋅ π 2 ⋅ sen p π p