Capítulo 7: Formas diferenciales
Anuncio

Capı́tulo 7
Formas diferenciales
1.
Campos vectoriales
El objetivo de este capı́tulo es establecer, de forma precisa e integral,
los conceptos del cálculo vectorial: campos vectoriales, gradiente, rotacional
y divergencia, integrales de lı́nea y superficie, etc. Es posible incluir todos
estos conceptos en una única teorı́a, la de formas diferenciales, la cual forma
la base no solo para éstos sino para la comprensión de la geometrá diferencial moderna, de la cual haremos una breve introducción en los capı́tulos
siguientes.
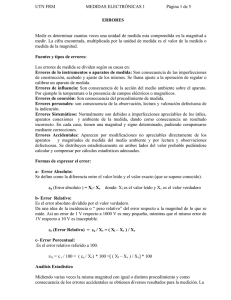
Definición 7.1. Para p ∈ Rn , el espacio tangente en p es el conjunto
Rnp = {(p, v) : v ∈ Rn }.
(p,v)
v
p
Figura 1. El espacio tangente puede verse como el espacio de n-vectores
cuyo punto inicial está ubicado en el punto p.
Es decir, Rnp es una copia del espacio euclideano Rn , con base en el punto
p. Podemos entender el espacio tangente como el espacio de n-vectores cuyo
129
130
7. Formas diferenciales
punto inicial, en lugar de estar ubicado en el origen, está ubicado en el punto
p, como en la figura 1. Si (p, v) ∈ Rnp , lo denotaremos simplemente como vp .
Es claro que Rnp es un espacio vectorial con operaciones
vp + up = (v + u)p ,
Además,
Rnp
y
λvp = (λv)p .
posee el producto interno
vp · up = v · u,
donde el producto de la derecha es el producto punto estándar en Rn .
A la unión puntual de los espacios tangentes en cada punto de Rn , es
decir
[
Rnp
p∈Rn
se le llama el haz tangente, y se denota por T Rn .
Definición 7.2. Un campo vectorial es una función F : Rn → T Rn tal que,
para cada p ∈ Rn ,
F (p) ∈ Rnp .
En otras palabras, el campo vectorial F asigna en cada punto p un vector
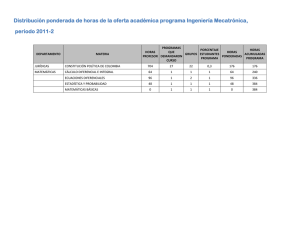
con inicio en p. La figura 2 ilustra, por ejemplo, el campo F (p) = (−p1 , p2 )p
en R2 .
Figura 2. El campo vectorial F (p) = (−p1 , p2 )p en R2 .
Si F, G : Rn → T Rn son campos vectoriales, entonces podemos definir
las siguientes opearaciones.
1. (F + G)(p) = F (p) + G(p);
2. (λF )(P ) = λF (p);
3. Si f : Rn → R, (f F )(p) = f (p)F (p);
4. (F · G)(p) = F (p) · G(p).
2. Formas diferenciales en R3
131
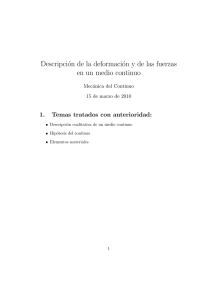
Si e1 , e2 , . . . , en es la base estándar en Rn , esta induce una base estándar
para Rnp en cada p ∈ Rn , a saber
(e1 )p , (e2 )p , . . . , (en )p .
Es decir, simplemente ubicamos el punto inicial de cada ei en el punto p
(figura 3).
(e2)p
p
(e1) p
e2
e1
Figura 3. La base estándar de R2p .
Si F : Rn → T Rn es un campo vectorial, entonces podemos escribirlo de
la forma
F (p) = F 1 (p)(e1 )p + F 2 (p)(e2 )p + . . . + F n (p)(en )p .
Las funciones F i : Rn → R son llamadas funciones componentes. Decimos
que el campo F es continuo (diferenciable, de clase C 1 , C k , etc.) si cada
componente F i es continua (diferenciable, de clase C 1 , C k , etc, respectivamente).
2.
Formas diferenciales en R3
Recordemos algunos conceptos del cálculo vectorial en R3 .
Gradiente Si f : R3 → R es una función diferenciable, el gradiente de f es el
campo
grad(f )(p) = (D1 f (p), D2 f (p), D3 f (p))p .
Es decir, el campo cuyas componentes son las derivadas parciales
de la función f . Este campo se suele denotar como ∇f
Rotacional Si F : R3 → T R3 es un campo vectorial diferenciable, el rotacional
de F es el campo
curl(F ) = (D2 F 3 − D3 F 2 , D3 F 1 − D1 F 3 , D1 F 2 − D2 F 1 ),
el cual se suele denotar por ∇ × F .
132
7. Formas diferenciales
Divergencia Si F : R3 → T R3 es diferenciable, la divergencia de F es la función
div(F ) = D1 F 1 + D2 F 2 + D3 F 3 ,
que suele denotarse por ∇ · F .
Procederemos, en el resto de esta sección, a integrar estos conceptos en
una clase única de operaciones. Para esto, como ya lo habı́amos mencionado,
necesitamos un concepto nuevo: el de formas diferenciales. Para simplificar
estas ideas, restringiremos nuestras definiciones y cálculos iniciales al espacio
R3 . La generalización a Rn es inmediata, y la dejaremos para la siguiente
sección.
Para cada p ∈ R3 , consideramos el espacio dual de R3p
(R3p )∗ = {ϕ : R3p → R : ϕ es lineal}.
Es decir, el espacio de las transformaciones lineales de R3p a R. No es difı́cil
ver que (R3p )∗ es un espacio vectorial de dimensión 3, al igual que R3p , y que
cualquier base {(v1 )p , (v2 )p , (v3 )p } de R3p induce una base de (R3p )∗ , llamada
[
[ [
la base dual y denotada por (v
1 )p , (v2 )p , (v3 )p , definida de la forma
(
1 i = j;
[
(v
i )p (vj )p =
0 i 6= j.
La base dual inducida por la base estándar (e1 )p , (e2 )p , (e3 )p se le llama
base dual estándar y se denota por
dx1p , dx2p , dx3p .
A cada una de las transformaciones dxip se les llama diferenciales elementales
en p. Nota que dxip (vp ) = v i , es decir, dxip solo toma la coordenada i del
vector vp ∈ Rnp . Además, para ψ ∈ (R3p )∗ , si definimos ξi = ψ((ei )p ), entonces
ψ = ξ1 dx1p + ξ2 dx2p + ξ3 dx3p .
S
A la unión p∈R3 (R3 )∗ de los espacios duales se le denomina haz cotangente
de R3 , y se denota por T ∗ R3 .
Una 1-forma diferencial en R3 es una función ω : R3 → T ∗ R3 tal que,
para cada p ∈ R3 ,
w(p) ∈ (R3p )∗ .
Por las observaciones anteriores, para cada p ∈ R3 podemos escribir
ω(p) = ω1 (p)dx1p + ω2 (p)dx2p + ω3 (p)dx3p .
A las funciones ωi : R3 → R se les llama funciones componentes de ω.
Solemos escribir, simplemente,
ω = ω1 dx1 + ω2 dx2 + ω3 dx3 .
2. Formas diferenciales en R3
133
Ejemplo 7.3. Sea f : R3 → R una función diferenciable. Definimos la
1-forma df como
df (p)(vp ) = Df (p)(v).
A la forma df se le llama el diferencial de f . Como el Jacobiano de f en
cada punto p está dado por
f ′ (p) = D1 f (p) D2 f (p) D3 f (p) ,
tenemos que
df = D1 f dx1 + D2 f dx2 + D3 f dx3 ,
o, en notación clásica,
df =
∂f
∂f
∂f
dx +
dy +
dz.
∂x
∂y
∂z
Podemos observar que df tiene las mismas componentes que grad f . Más
aún, si π i : R3 → R es la función π i (x) = xi , entonces
dπ i = dxi ,
lo que motiva a usar la notación dxi para la base dual estándar.
Definición 7.4. Sea ϕ : R3p × R3p → R. Decimos que ϕ es bilineal si es lineal
en cada coordenada. Es decir, para up , vp , wp ∈ R3p y α, β ∈ R,
ϕ(αup + βvp , ωp ) = αϕ(up , ωp ) + βϕ(vp , ωp ),
ϕ(up , αvp + βωp ) = αϕ(up , vp ) + βϕ(up , ωp ).
Ejemplo 7.5 (Producto punto). El ejemplo más natural de una forma bilineal es la inducida por el producto punto en R3p , dada por
ϕ(up , vp ) = u · v.
La bilinealidad se sigue directamente de la definición del producto punto.
Definición 7.6. Decimos que la forma bilineal ϕ es alternante si, para cada
up , vp ∈ R3p ,
ϕ(up , vp ) = −ϕ(vp , up ).
Podemos notar que, si ϕ es alternante, ϕ(up , up ) = 0 para todo up ∈ R3p .
Denotamos el espacio de formas bilineales alternantes en R3p por Λ2 (R3p ).
Si ϕ1 , ϕ2 ∈ (R3p )∗ , definimos el producto cuña de ϕ1 y ϕ2 como
ϕ1 (up ) ϕ1 (vp )
.
ϕ1 ∧ ϕ2 (up , vp ) = det
ϕ2 (up ) ϕ2 (vp )
134
7. Formas diferenciales
Por ejemplo, sean ϕ1 = 2dx1 − 3dx2 y ϕ2 = dx1 + dx2 . Entonces ϕ1 ∧ ϕ2
está dado por
ϕ1 (x) ϕ1 (y)
ϕ1 ∧ ϕ2 (x, y) = det
ϕ2 (x) ϕ2 (y)
= ϕ1 (x)ϕ2 (y) − ϕ1 (y)ϕ2 (x)
= (2x1 − 3x2 )(y 1 + y 2 ) − (2y 1 − 3y 2 )(x1 + x2 )
= 5x1 y 2 − 5x2 y 1 .
Nota que ϕ1 ∧ ϕ2 (y, x) = −ϕ1 ∧ ϕ2 (x, y); es decir, ϕ1 ∧ ϕ2 es alternante. Esta
es una de las propiedades del producto cuña, enumeradas en las siguiente
proposición.
Proposición 7.7. Sean ϕ1 , ϕ2 ∈ (R3p )∗ . Entonces
1. ϕ1 ∧ ϕ2 es bilineal y alternante.
2. ϕ1 ∧ ϕ2 = −ϕ2 ∧ ϕ1 .
3. dx1p ∧ dx2p , dx1p ∧ dx3p y dx2p ∧ dx3p forman una base para Λ2 (R3p ).
Denotaremos a dxip ∧ dxjp simplemente por (dxi ∧ dxj )p . Solo se demostrará la parte 3 de la proposición. Las primeras dos se dejan como ejercicio
al lector (ejercicio 3).
Demostración de 3: Para demostrar que (dx1 ∧dx2 )p , (dx1 ∧dx3 )p y (dx2 ∧
dx3 )p son linealmente independientes, definimos
Φ = α1 (dx1 ∧ dx2 )p + α2 (dx1 ∧ dx3 )p + α3 (dx2 ∧ dx3 )p
y suponemos que Φ = 0. Debemos mostrar entonces que α1 = α2 = α3 = 0.
Si i 6= j,
dxi (ek ) dxi (el )
(dx ∧ dx )p ((ek )p , (el )p ) = det
dxj (ek ) dxj (el )
i = k, j = l
1
= −1 i = l, j = k
0
en cualquier otro caso.
i
j
De aquı́ que
Φ((e1 )p , (e2 )p ) = α1 ,
Φ((e1 )p , (e3 )p ) = α2 ,
Φ((e2 )p , (e3 )p ) = α3 ,
Por lo tanto, como Φ = 0, α1 = α2 = α3 = 0.
2. Formas diferenciales en R3
135
Ahora demostraremos que (dx1 ∧ dx2 )p , (dx1 ∧ dx3 )p y (dx2 ∧ dx3 )p
generan el espacio Λ2 (R3p ). Sea ϕ ∈ Λ2 (R3p ). Entonces
3
3 X
3
3
X
X
X
xi y j ϕ((ei )p , (ej )p ).
y j (ej )p =
xi (ei )p ,
ϕ(xp , yp ) = ϕ
i=1
j=1
i=1 j=1
Como ϕ es alternante, ϕ((ei )p , (ei )p ) = 0 y ϕ((ei )p , (ej )p ) = −ϕ((ej )p , (ei )p ).
Por lo que
X
ϕ(xp , yp ) =
(xi y j − xj y i )ϕ((ei )p , (ej )p )
1≤i<j≤3
= (x1 y 2 − x2 y 1 )ϕ((e1 )p , (e2 )p ) + (x1 y 3 − x3 y 1 )ϕ((e1 )p , (e3 )p )
+ (x2 y 3 − x3 y 2 )ϕ((e2 )p , (e3 )p ).
Nota que
xi y j − xj y i = dxip (xp )dxjp (yp ) − dxjp (xp )dxip (yp ) = (dx1 ∧ dx2 )p (xp , yp ).
Si α1 = ϕ((e1 )p , (e2 )p ), α2 = ϕ((e1 )p , (e3 )p ), α3 = ϕ((e2 )p , (e3 )p ), entonces
ϕ = α1 (dx1 ∧ dx2 )p + α2 (dx1 ∧ dx3 )p + α3 (dx2 ∧ dx3 )p .
Corolario 7.8. Λ2 (R3p ) es un espacio vectorial de dimensión 3.
S
Una 2-forma diferencial es una función ω : R3 → p∈R3 Λ2 (R3p ) tal que,
para cada p ∈ R3 ,
ω(p) ∈ Λ2 (R3p ).
Por la proposición anterior, si ω es una 2-forma diferencial, entonces
ω(p) = ω12 (p)(dx1 ∧ dx2 )p + ω13 (p)(dx1 ∧ dx3 )p + ω23 (p)(dx2 ∧ dx3 )p ,
donde ω12 , ω13 , ω23 : R3 7→ R. Decimos que ω es continua (diferenciable, C 1 ,
etc.) si cada una de las componentes ωij son continuas (diferenciables, C 1 ,
etc., respectivamente).
Sea ω la 1-forma diferencial ω = ω1 dx1 + ω2 dx2 + ω3 dx3 . El diferencial
dω es la 2-forma diferencial dada por
dω(p) = (dω1 )p ∧ dx1p + (dω2 )p ∧ dx2p + (dω3 )p ∧ dx3p .
Como, para cada i = 1, 2, 3,
dωi = D1 ωi dx1 + D2 ωi dx2 + D3 ωi dx3 ,
tenemos que la 2-forma diferencial dω está dada por
dω = (D1 ω2 − D2 ω1 )dx1 ∧ dx2 + (D1 ω3 − D3 ω1 )dx1 ∧ dx3
+ (D2 ω3 − D3 ω2 )dx2 ∧ dx3 .
136
7. Formas diferenciales
En notación clásica, dω está dada por
∂ω
∂ω
∂ω
∂ω2 ∂ω3 ∂ω1 1
2
3
dy ∧ dz +
dz ∧ dx +
dx ∧ dy.
−
−
−
∂y
∂z
∂z
∂x
∂x
∂y
Observa que, escritas en ese orden, las componentes de dω son las mismas
que las del rotacional del campo vectorial con componentes w1 , w2 y w3 .
Consideremos una función ϕ : R3p × R3p × R3p → R tal que satisface las
siguientes propiedades:
1. ϕ es multilineal; es decir, es lineal en cada variable; y
2. ϕ es alternante; es decir,
ϕ(up , vp , wp ) = −ϕ(vp , up , wp ),
ϕ(up , vp , wp ) = −ϕ(wp , vp , up ),
ϕ(up , vp , wp ) = −ϕ(up , wp , vp ).
Es decir, el intercambio de cualquiera dos variables en ϕ implica
un cambio de signo.
Dichas formas en R3p forman un espacio vectorial, y se denota por Λ3 (R3p ).
Ejemplo 7.9 (Determinante). El ejemplo natural de una forma en Λ3 (R3p )
está dado por
ϕ(up , vp , wp ) = det u v w .
Es decir, el determinante de la matriz formada por los vectores u, v y w
como columnas. Las propiedades básicas del determinante implican que ϕ
es multilineal y alternante.
Las forma inducida por el determinante es denotada por
(dx1 ∧ dx2 ∧ dx3 )p .
Aunque no hemos definido el producto cuña de tres 1-formas, esta notación será justificada en la siguiente sección, cuando estudiemos el producto
cuña de k-formas diferenciales en Rn . Sin embargo, tenemos las siguiente
proposición.
Proposición 7.10. Sea ϕ ∈ Λ3 (R3p ). Entonces existe α ∈ R tal que
ϕ = α (dx1 ∧ dx2 ∧ dx3 )p .
Demostración. Observemos primero que
(
±ϕ(e1 , e2 , e3 ) i, j, k son diferentes
ϕ(ei , ej , ek ) =
0
de otra forma.
Esto se sigue directamente del hecho que ϕ es alternante. Sea
α = ϕ(e1 , e2 , e3 ).
137
3. Algebra exterior
Mostraremos que ϕ = α (dx1 ∧ dx2 ∧ dx3 )p . Sean x, y, z ∈ R3p . Entonces
3
3
3
X
X
X
X
j
i
y ej ,
z k ek =
x ei ,
ϕ(x, y, z) = ϕ
xi y j z k ϕ(ei , ej , ek )
i=1
j=1
k=1
1 2 3
2 3 1
i,j,k
3 1 2
= ϕ(e1 , e2 , e3 ) x y z + x y z + x y z
= α det x y z .
− x1 y 3 z 2 − x2 y 1 z 3 − x3 y 2 z 1
Como corolario, tenemos que Λ3 (R3p ) es un espacio vectorial de dimensión 1, y que cualquier forma en Λ3 (R3p ) es simplemente un múltiplo del
determinante de matrices de 3 × 3.
S
Decimos que ω : R3 → p∈R3 Λ3 (R3p ) es una 3-forma diferencial si, para
cada p ∈ R3 ,
ω(p) ∈ Λ3 (R3p ).
Si escribimos
ω(p) = α(p)(dx1 ∧ dx2 ∧ dx3 )p ,
diremos que ω es continua (diferenciable, C 1 , etc.) si α : R3 → R es continua
(diferenciable, C 1 , etc., respectivamente).
Si ω = ω1 dx2 ∧dx3 +ω2 dx3 ∧dx1 +ω3 dx1 ∧dx2 es una 2-forma diferencial,
entonces definimos el diferencial de ω como la 3-forma
dω = (D1 ω1 + D2 ω2 + D3 ω3 )dx1 ∧ dx2 ∧ dx3 .
La razón por la cual definimos el diferencial de esta manera la veremos,
igualmente, en la secciones siguientes, ya que necesitamos definir el producto
cuña de una 1-forma con una 2-forma. Sin embargo, podemos observar que
el diferencial dω tiene como componente la divergencia del campo vectorial
en R3 con componentes ω1 , ω2 y ω3 .
De esta forma, podemos concluir que el gradiente, el rotacional y la
divergencia forman parte de la misma operación en R3 : el diferencial de
formas. En las secciones siguientes generalizaremos estos conceptos al espacio
Rn .
3.
Algebra exterior
Sea V un espacio vectorial real de dimensión finita, y n = dim V . Decimos que la función T : V k → R, donde
k
z
}|
{
V = V × V × ··· × V ,
k
138
7. Formas diferenciales
es multilineal si es lineal en cada coordenada, es decir
i
z }| {
T (v1 , v2 , . . . , αvi + βu, . . . , vk )
i
i
z}|{
z}|{
= αT (v1 , v2 , . . . , vi , . . . , vk ) + βT (v1 , v2 , . . . , u , . . . , vk )
para cada i = 1, 2, . . . , k. Decimos que la función multilineal T es alternante
si
i
j
z}|{
z}|{
T (v1 , . . . , vi , . . . , vj , . . . , vk ) = −T (v1 , . . . , vj , . . . , vi , . . . , vk ),
para cada i, j = 1, 2, . . . , k, i 6= j.
Las principales propiedades de las funciones alternantes están enumeradas en la siguiente proposición.
Proposición 7.11. Si T : V k → R es alternante, entonces
1. Para σ ∈ Sk ,
T (vσ(1) , vσ(2) , . . . , vσ(k) ) = sgn(σ)T (v1 , . . . , vk ),
donde Sk es el grupo simétrico de k objetos y
(
1
si σ es par
sgn(σ) =
−1 si σ es impar;
2. T (v1 , . . . , vi , . . . , vi , . . . , vk ) = 0; y
3. Si los vectores v1 , . . . , vk son linealmente dependientes,
T (v1 , . . . , vk ) = 0.
Demostración. Demostraremos la tercera parte de esta proposición, mientras las dos primeras se dejan como ejercicio (ejercicio 5).
Si v1 , . . . , vk son vectores linealmente dependientes, entonces podemos
suponer, sin pérdida de generalidad, que existen α2 , . . . , αk ∈ R tales que
v1 =
k
X
αi vi .
i=2
Tenemos entonces que, por la linealidad de T en la primer variable,
T (v1 , v2 , . . . , vk ) =
k
X
αi T (vi , v2 , . . . , vk ) = 0,
i=2
donde la última igualdad se debe a que T es alternante.
139
3. Algebra exterior
Denotaremos el conjunto de funciones multilineales alternantes en V k
por Λk (V ). No es muy difı́cil verificar que Λk (V ) es un espacio vectorial,
con suma y multiplicación escalar puntuales. En el caso k = 1, Λ1 (V ) = V ∗ ,
el espacio dual de V . La tercera parte de la proposición 7.11 implica que
Λk (V ) = {0} si k > n.
Definición 7.12. Sean ϕ1 , ϕ2 , . . . , ϕk ∈ V ∗ . Definimos el producto exterior
de ϕ1 , ϕ2 , . . . , ϕk como la transformación multilineal alternante dada por
(7.1)
ϕ1 ∧ ϕ2 ∧ · · · ∧ ϕk (v1 , v2 , . . . , vk ) = det(ϕi (vj )).
El producto exterior es también llamado producto cuña. La propiedades
básicas del determinante permiten garantizar que la transformación dada
por (7.1) es, de hecho, multilineal y alternante.
Teorema 7.13. Sea V un espacio vectorial, con dim V = n < ∞. Sea
B = {v1 , v2 , . . . , vn } una base para V y {vb1 , vb2 , . . . , vc
n } la base dual de B
∗
para el espacio dual V . Entonces los productos
vc
c
c
i1 ∧ v
i2 ∧ · · · ∧ v
ik ,
con 1 ≤ i1 < i2 < . . . < ik ≤ n, forman una base para Λk (V ), 1 ≤ k ≤ n.
Como corolario, tenemos que la dimensión del espacio Λk (V ) es igual a
n
,
k
el coeficiente binomial de n en k.
Para simplificar la notación, denotaremos un multiı́ndice (i1 , i2 , . . . , ik )
como I; ası́, |I| representa su longitud (en este caso |I| = k). Decimos que
un multiı́ndice I = (i1 , i2 , . . . , ik ) es creciente si i1 < i2 < . . . < ik .
La lista (vi1 , vi2 , . . . , vik ) será denotada por vI , y
vbI = vc
c
c
i1 ∧ v
i2 ∧ · · · ∧ v
ik .
Procedemos ahora a la demostración del teorema 7.13.
Demostración. Mostraremos primero que los productos vI , con I creciente,
son linealmente independientes. Suponemos entonces que
X
aI vbI = 0,
I creciente
y demostraremos que todos los aI = 0.
Sea J un multiı́ndice creciente. Entonces
X
aI vbI (vJ ) = 0,
I creciente
140
7. Formas diferenciales
Pero
X
I creciente
aI vbI (vJ ) =
X
I creciente
aI vbI (vJ ) = aJ vc
J (vJ ) = aJ ,
por lo que aJ = 0, como querı́amos verificar.
Ahora, sea Φ ∈ Λk (V ), u1 , u2 , . . . , uk ∈ V , y evaluaremos
Φ(u1 , u2 , . . . , uk ).
Primero, sean aji ∈ R, i = 1, 2, . . . , k, j = 1, 2, . . . , n, tales que
ui =
n
X
aji vj ,
i = 1, 2, . . . , k.
j=1
Entonces
Φ(u1 , u2 , . . . , uk ) = Φ(
n
X
aj11 vj1 ,
=
J
=
n
X
ajkk vjk )
jk =1
aj11 aj22 . . . ajkk Φ(vj1 , vj2 , . . . , vjk )
X
J creciente
=
aj22 vj2 , . . . ,
j2 =1
j1 =1
X
n
X
X
X
σ(j1 ) σ(j2 )
σ(j )
a2
. . . ak k sgn(σ)
a1
σ∈Sk
Φ(vJ )
det(aji l )i,l=1,...,k Φ(vJ ).
J creciente
Si definimos ξJ = Φ(vJ ), entonces
Φ(u1 , . . . , uk ) =
X
ξJ det(aji l )1≤i,l≤k .
J creciente
Como cada aji l = vc
jl (ui ), tenemos que
Por lo tanto
det(aji l ) = vc
J (u1 , . . . , uk ).
Φ=
X
J creciente
ξJ vc
J,
y concluimos que los vbI , con I creciente, generan el espacio Λk (V ).
De la demostración del teorema 7.13, tenemos el siguiente corolario.
Corolario 7.14. Si v1 , v2 , . . . , vn es una base para V y Φ ∈ Λn (V ), entonces
Φ(u1 , . . . , un ) = det(aji )Φ(v1 , . . . , vn ),
si ui =
Pn
j
j=1 ai vj .
141
3. Algebra exterior
Si B = {v1 , v2 , . . . , vn } y C = {u1 , u2 , . . . , un } son bases para V , entonces
el corolario 7.14 implica que el signo del producto
Φ(v1 , v2 , . . . , vn ) · Φ(u1 , u2 , . . . , un )
es independiente de Φ, y está dado por el signo de det A, si A es la matriz
de cambio de base. Entonces, det A define una “paridad” de la base B con
respecto a la base C, la cual genera una relación de equivalencia entre las
bases de V :
{u1 , u2 , . . . , un } ∼ {v1 , v2 , . . . , vn }
si y solo si
Φ(v1 , v2 , . . . , vn ) · Φ(u1 , u2 , . . . , un ) > 0
Λn (V
para Φ ∈
), Φ 6= 0. A la clase de equivalencia de la base {v1 , v2 , . . . , vn }
se le denota por
[v1 , v2 , . . . , vn ],
y se le llama orientación de la base.
Ejemplo 7.15 (Orientación estándar en R2 ). . Tomemos E = {e1 , e2 }, la
base estándar de R2 , y
o
n
1
1
, u2 =
B = u1 =
−1
1
otra base para R2 . Como
u1 = e1 + e2
u2 = e1 − e2 ,
la matriz de cambio de base está dada por
1 1
A=
.
1 −1
Como det A = −2 < 0, concluimos que
[e1 , e2 ] 6= [u1 , u2 ].
Es decir, las bases E y B tienen distinta orientación. Geométricamente, mientras la base estándar está orientada en el sentido opuesto a las manecillas del
reloj, la base B está orientada en la dirección opuesta, como se ve en la figura 4. A la orientación de la base estándar en R2 la llamaremos simplemente
orientación estándar.
Ejemplo 7.16 (Regla de la mano derecha). La orientación [e1 , e2 , e3 ] de
la base estándar de R3 es conocida comúnmente como la regla de la mano
derecha. Es llamada ası́ porque, si identificamos los vectores e1 , e2 , e3 con la
dirección de cada uno de los ejes x, y y z, respectivamente, entonces estas
direcciones corresponden a las direcciones de los dedos ı́ndice, medio y pulgar de la mano derecha, respectivamente, con el ı́ndice extendido, el medio
142
7. Formas diferenciales
e2
u1
e1
u2
Figura 4. La orientación de las bases estándar y la base B. Mientras la
base estándar está orientada en el sentido opuesto a las manecillas del
reloj, la base B está orientada en la dirección opuesta.
e3
e2
e1
Figura 5. Los ejes x, y y z, con direcciones e1 , e2 y e3 , siguen las direcciones de los dedos ı́ndice, medio y pulgar de la mano derecha.
doblado hacia la palma y el pulgar hacia arriba, como se puede verificar con
ayuda de la figura 5.
Estamos listos para definir una forma diferencial en Rn .
Definición 7.17. S
Una k-forma exterior, o k-forma diferencial, en Rn , es una
n
función ω : R → p∈Rn Λk (Rnp ) tal que, para cada p ∈ Rn , ω(p) ∈ Λk (Rnp ).
Es decir, para cada p ∈ Rn , ω(p) es una transformación multilineal
alternante en (Rnp )k , donde Rnp es el espacio tangente en p.
Por el teorema 7.13, para cada p ∈ Rn y cada k-multiı́ndice creciente I
existen ωI (p) tales que
X
ω(p) =
ωI (p)dxIp ,
I creciente
donde
dxIp = dxip1 ∧ dxip2 ∧ · · · ∧ dxipk .
143
3. Algebra exterior
Si las funciones ωI : Rn → R son continuas (diferenciables, C 1 , etc.), entonces decimos que ω continua (diferenciable, C 1 , etc., respectivamente).
A una función f : Rn → R la llamaremos, por convención, una 0-forma.
Ejemplo 7.18 (Formas en R). Las únicas formas diferenciales no triviales
en el espacio unidimensional R, aparte de las 0-formas, son las 1-formas
ω0 dx, con ω0 : R → R.
Ejemplo 7.19 (Formas en R2 ). En R2 , las 1-formas diferenciales están
dadas por
ω1 dx1 + ω2 dx2 ,
con w1 , w2 funciones en R2 , mientras las 2-formas diferenciales se escriben
ω0 dx1 ∧ dx2 ,
o simplemente ω0 dx1 dx2 , o ω0 dxdy, en notación clásica, donde ω0 es una
función en R2 . A dx1 ∧ dx2 se le llama el elemento de área en R2 .
Ejemplo 7.20 (Formas en R3 ). En el espacio R3 , tenemos las 1-formas,
ω1 dx1 + ω2 dx2 + ω3 dx3 .
Las 2-formas se escriben comúnmente
F1 dx2 ∧ dx3 + F2 dx3 ∧ dx1 + F3 dx1 ∧ dx2 .
La notación y el orden en que se suelen escribir los productos exteriores se
aclararán más adelante. Las 3-formas se escriben
ω0 dx1 ∧ dx2 ∧ dx3 .
En notación clásica, simplemente se suele escribir ω0 dxdydz. dx1 ∧ dx2 ∧ dx3
es llamado el elemento de volumen en R3 .
Las k-formas diferenciales en Rn forman un espacio vectorial bajo las
operaciones suma y multiplicación puntuales. Es decir si ω y η son k-formas
diferenciales, entonces su suma está dada por
X
ω+η =
(ωI + ηI )dxI ,
mientras que la multiplicación escalar está dada simplemente por
X
λω =
λωI dxI .
Definición 7.21. Si ω es una k-forma diferencial y η es una l-forma diferencial en Rn , definimos el producto exterior ω ∧ η como la (k + l)-forma
diferencial
X
(7.2)
ω∧η =
ωI ηJ dxI ∧ dxJ ,
I,J
donde la suma corre sobre todos los multiı́ndices crecientes I de longitud k
y todos los multiı́ndices crecientes J de longitud l.
144
7. Formas diferenciales
En la fórmula (7.2), algunos, o todos, los productos dxI ∧ dxJ pueden ser
iguales a 0, lo cual depende de la longitud de I y de J, y de si I y J tienen
ı́ndices comunes. Al producto exterior también se le conoce comúnmente
como el producto cuña.
Ejemplo 7.22. Consideremos las formas ω y η en R3 dadas por
ω = xdx + ydy + zdz
y
η = xdx ∧ dy + ydx ∧ dz,
y vamos a calcular la 3-forma ω ∧ η. Entonces
ω ∧ η = x2 dx ∧ dx ∧ dy + xy dx ∧ dx ∧ dz + xy dy ∧ dx ∧ dy
+ y 2 dy ∧ dx ∧ dz + xz dz ∧ dx ∧ dy + yz dz ∧ dx ∧ dz.
De los términos anteriores, solo dos son desiguales a cero. Tenemos, por lo
tanto, que
ω ∧ η = y 2 dy ∧ dx ∧ dz + xz dz ∧ dx ∧ dy
= −y 2 dx ∧ dy ∧ dz + xz dx ∧ dy ∧ dz
= (xz − y 2 ) dx ∧ dy ∧ dz.
Algunas de las propiedades del producto exterior están enumeradas por
la siguiente proposición. Otras se explorarán en los ejercicios.
Proposición 7.23. Sean ω una k-forma, η una l-forma y ψ una p-forma
diferencial en Rn . Entonces
1. ω ∧ (η ∧ ψ) = (ω ∧ η) ∧ ψ;
2. ω ∧ η = (−1)kl η ∧ ω; y
3. Si l = p, ω ∧ (η + ψ) = ω ∧ η + ω ∧ ψ.
Demostración.
que
1. Es claro, de la definición del producto exterior,
dxI ∧ (dxJ ∧ dxL ) = (dxI ∧ dxJ ) ∧ dxL
para cualquiera multiı́ndices I, J y L. Entonces
X
ωI ηJ ψL dxI ∧ dxJ ∧ dxL = (ω ∧ η) ∧ ψ.
ω ∧ (η ∧ ψ) =
I,J,L
2. De manera similar, es suficiente con verificar esta parte para los
productos dxI ∧ dxJ . Como dxi ∧ dxj = −dxj ∧ dxi para cualquier
i, j,
dxI ∧ dxJ = dxi1 ∧ dxi2 ∧ · · · ∧ dxik ∧ dxj1 ∧ dxj2 ∧ · · · ∧ dxjl
= (−1)k dxj1 ∧ dxi1 ∧ dxi2 ∧ · · · ∧ dxik ∧ dxj2 ∧ · · · ∧ dxjl
= (−1)−kl dxJ ∧ dxI .
145
4. Cambio de coordenadas
3. La tercera parte se sigue de forma directa:
X
ω ∧ (η + ψ) =
ωI (ηJ + ψJ )dxI ∧ dxJ = ω ∧ η + ω ∧ ψ.
La segunda parte de la proposición 7.23 implica que, si k es impar y ω
es una k-forma diferencial, entonces
ω ∧ ω = 0.
Sin embargo, si k es par, es posible que ω ∧ ω no sea idénticamente cero,
como lo muestra el siguiente ejemplo.
Ejemplo 7.24. Sea ω la 2-forma diferencial en R4 dada por
ω = x1 dx1 ∧ dx2 + x2 dx3 ∧ dx4
Tenemos entonces que
ω ∧ ω = x1 x2 dx1 ∧ dx2 ∧ dx3 ∧ dx4 + x1 x2 dx3 ∧ dx4 ∧ dx1 ∧ dx2
= 2x1 x2 dx1 ∧ dx2 ∧ dx3 ∧ dx4 ,
la cual no es idéntica a cero en R4 .
4.
Cambio de coordenadas
En esta sección estudiamos el efecto de un cambio de variable en una
forma diferencial.
Definición 7.25. Sea k ≥ 1. Si ω es una k-forma diferencial en Rm y
f : Rn → Rm una función diferenciable, f ∗ ω es la k-forma diferencial en Rn
dada por
f ∗ ω(p)((v1 )p , . . . , (vk )p ) = ω(f (p))(Df (p)(v1 )f (p) , . . . .Df (p)(vk )f (p) ).
Si g es una 0-forma en Rm , definimos simplemente f ∗ g = g ◦ f .
A f ∗ se le suele llamar el levantamiento inducido por f . Las propiedades
elementales de f ∗ se enumeran en la siguiente proposición.
Proposición 7.26. Sea f : Rn → Rm diferenciable. Entonces
1. Si ω, η son k-formas diferenciales en Rm ,
f ∗ (ω + η) = f ∗ ω + f ∗ η;
2. Si g es una 0-forma diferencial,
f ∗ (gω) = f ∗ g · f ∗ ω;
y
146
7. Formas diferenciales
3. Si ϕ1 , ϕ2 ,...,ϕk son 1-formas diferenciales en Rn ,
f ∗ (ϕ1 ∧ · · · ∧ ϕk ) = f ∗ ϕ1 ∧ · · · ∧ f ∗ ϕk .
Demostración. Las primeras dos partes de la proposición se siguen directamente de la definición de f ∗ y se dejan como ejercicio (ejercicio 10).
Rn ,
Para demostrar la parte 3, sean ϕ1 , ϕ2 ,...,ϕk 1-formas diferenciales en
p ∈ Rn y (v1 )p , (v2 )p , . . . , (vk )p ∈ Rnp . Entonces
f ∗ (ϕ1 ∧ . . . ∧ ϕk )(p)((v1 )p , . . . , (vk )p )
= (ϕ1 ∧ · · · ∧ ϕk )(f (p))(Df (p)(v1 )f (p) , . . . , Df (p)(vk )f (p) )
= det ϕi (f (p))(Df (p)(vj )f (p) ) = det f ∗ ϕi (p)(vj )p
= (f ∗ ϕ1 ∧ · · · ∧ f ∗ ϕk )(p)((v1 )p , . . . , (vk )p ).
P
De la proposición 7.26, si ω = I ωI dxI , entonces
X
f ∗ω =
(ωI ◦ f )f ∗ (dxI ),
I
donde cada sumando es igual a
f ∗ (dxI ) = f ∗ (dxi1 ∧ · · · ∧ dxik ) = f ∗ dxi1 ∧ · · · ∧ f ∗ dxik .
Cada una de las 1-formas en el producto, evaluadas en un punto p, es igual
a
f ∗ (dxi )(p)(vp ) = dxif (p) (Df (p)(v)f (p) ) = Df i (p)(v),
es decir, la derivada de la i-ésima componente de f en p, aplicada al vector
v. Entonces, como Df i (p)(v) = df i (p)(vp ), podemos escribir f ∗ dxi = df i . Si
I es un multiı́ndice, escribimos
df I = df i1 ∧ · · · ∧ df ik ,
por lo que entonces
f ∗ω =
X
(ωI ◦ f )df I .
I
Ası́, vemos que f ∗ actúa como un cambio de coordenadas. Si las coordenadas de Rn están descritas por (x1 , x2 , . . . , xn ), y (y 1 , y 2 , . . . , y m ) son las
coordenadas en Rm dadas por y i = f i (x1 , x2 , . . . , xn ), entonces tenemos que,
si
X
ω(y) =
ωI (y 1 , . . . , y m )dy I
I
es una forma en
Rm ,
está dada en Rn por
X
f ∗ ω(x) =
ωI (f 1 (x), . . . , f m (x))(df I )x .
f ∗ω
I
147
4. Cambio de coordenadas
Ejemplo 7.27 (Coordenadas polares). Sea U ⊂ R2 el conjunto (0, 2π) × R
(figura 6), y f : U → R2 dada por
f (r, θ) = (r cos θ, r sen θ).
Sean x, y las coordenadas en R2 dadas por x = f 1 (r, θ) y y = f 2 (r, θ).
La transformación (r, θ) 7→ (x, y) cambia de coordenadas polares (r, θ) a
θ
2π
U
r
Figura 6. Dominio de definición de las coordenadas polares.
coordenadas cartesianas (x, y). Ası́ que, si ω es una forma diferencial en el
plano en coordenadas cartesianas (x, y), f ∗ ω es una forma diferencial en
coordenadas polares (r, θ). Tenemos que
(7.3)
f ∗ dx = df 1 = cos θdr − r sen θdθ y f ∗ dy = df 2 = sen θdr + r cos θdθ.
Por ejemplo, sea ω la 1-forma diferencial definida en R2 \ {0} por
−y
x
ω= 2
dx + 2
dy.
x + y2
x + y2
Entonces
−r sen θ ∗
r cos θ ∗
f ∗ω =
f dx +
f dy
r2
r2
cos θ
− sen θ
(cos θdr − r sen θdθ) +
(sen θdr − r cos θdθ)
=
r
r
= dθ.
Esta última identidad, junto con las ecuaciones (7.3), suelen simplemente
escribirse como
dx = cos θdr − r sen θdθ,
dy = sen θdr + r cos θdθ,
−y
x
dθ = 2
dx + 2
dy.
x + y2
x + y2
Como cos θdx + sen θdy = dr, también tenemos que
y
x
dx + p
dy.
dr = p
x2 + y 2
x2 + y 2
148
7. Formas diferenciales
La siguiente proposición extiende las propiedades enumeradas en la proposición 7.26.
Proposición 7.28. Sea f : Rn → Rm diferenciable.
1. Si ω y η son formas diferenciales en Rm , entonces
f ∗ (ω ∧ η) = f ∗ ω ∧ f ∗ η.
2. Si g : Rp → Rn es diferenciable, y ω es una forma diferencial en
Rm , entonces la forma diferencial (f ◦ g)∗ ω en Rp satisface
(f ◦ g)∗ ω = g∗ (f ∗ ω).
Observemos primero que la proposición 7.28 no hace ninguna referencia
al orden de las formas involucradas. En particular, la primera parte de esta
proposición es una generalización de la parte (3) de la proposición 7.26.
Demostración.
Para la primera parte, observemos que si ω =
P
η = J ηJ dxJ , entonces
X
ω∧η =
ωI ηJ dxI ∧ dxJ ,
P
I
ωI dxI y
I,J
y por lo tanto
f ∗ (ω ∧ η) =
X
I,J
X
(ωI ηJ ) ◦ f df I ∧ df J =
(ωI ◦ f )(ηJ ◦ f )df I ∧ df J
I,J
X
X
(ηJ ◦ f )df J = f ∗ ω ∧ f ∗ η.
=
(ωI ◦ f )df I ∧
J
I
P
Para la segunda parte, sea ω = I ωI dxI . Entonces
X
(f ◦ g)∗ ω(q) =
ωI (f (g(q)))d(f ◦ g)I (q).
I
Ahora bien, para q ∈
Rp ,
ωI (f (g(q))) = (ωI ◦ f )(g(q)) = (ωI ◦ f ) ◦ g(q),
por lo que es suficiente con mostrar que d(f ◦ g)I (q) = g∗ (df I )(q). Esta
identidad es, esencialmente, la regla de la cadena: como
d(f ◦ g)i (q)(vq ) = D(f ◦ g)i (q)(v) = Df i (g(q)) Dg(q)(v) ,
tenemos que
d(f ◦ g)i (q)(vq ) = df i (g(p))(Dg(q)(v)g(q) ) = g∗ (df i )(q)(vq ).
149
Ejercicios
Ejercicios
1. Dibuja un bosquejo de los siguientes campos vectoriales en R2 :
a) F (x, y) = (−y, x);
b) F (x, y) = (x, 0).
2. Calcula el producto cuña φ ∧ ψ de las siguientes 1-formas en R3 .
a) φ = 3dx + dz, ψ = dy − dz;
b) φ = dx − dy + 2dz, ψ = 3dx − 4dy − 2dz.
Escribe el resultado en la base dy ∧ dz, dz ∧ dx, dx ∧ dy.
3. Demuestra la proposición 7.7.
4. Calcula el diferencial dω de las siguientes 1-formas diferenciales en R3 .
a) ω(x, y, z) = (z 2 − x2 )dx + (y 2 − z 2 )dy + (x2 − y 2 )dz;
b) ω(x, y, z) = (3x2 − y 2 z)dx − 2xyzdy − xy 2 dz.
5. Demuestra las partes restantes de la proposición 7.11.
6. Calcula ω ∧ η, para las siguientes formas diferenciales en R3 .
a) ω = xdx − ydy, η = zdx ∧ dy + xdy ∧ dz;
b) ω = dx + dy + dz, η = dx ∧ dy + dx ∧ dz + dy ∧ dz;
c) ω = zdx ∧ dy + xdy ∧ dz, η = ω.
7. Sea ω la 2-forma diferencial en R2n dada por
w = dx1 ∧ dx2 + dx3 ∧ dx4 + . . . + dx2n−1 ∧ dx2n .
Calcula
n veces
}|
{
z
ω ∧ ω ∧ ... ∧ ω.
8. Para una k-forma diferencial ω en Rn , definimos la (n − k)-forma diferencial ∗ω como
X
∗ω =
sgn(I, J)ωI dxJ ,
I
donde (I, J) = (i1 , i2 , . . . , ik , j1 , j2 , . . . , j(n−k) ) es la permutación en Sn
tal que
i1 < i2 < · · · < ik
y
j1 < j2 < · · · < j(n−k) .
Calcula ∗ω para las siguientes formas diferenciales.
a) La 2-forma diferencial en R3 dada por
ω = ω12 dx ∧ dy + ω13 dx ∧ dz + ω23 dy ∧ dz.
b) La 1-forma diferencial en R2 dada por
ω = ω1 dx + ω2 dy.
9. Muestra que ∗ ∗ ω = (−1)k(n−k) ω.
150
7. Formas diferenciales
10. Demuestra las primeras dos partes de la proposicion 7.26.