Descripción de la deformación y de las fuerzas
en un medio continuo
Mecánica del Continuo
15 de marzo de 2010
1.
Temas tratados con anterioridad:
Descripción cualitativa de un medio continuo
Hipótesis del continuo
Elementos materiales
1
2.
2.1.
Deformación en un medio continuo
Desplazamiento
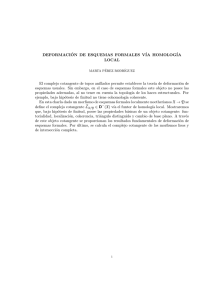
Cuando el medio se deforma, cada elemento material puntual se desplaza
desde su posición inicial xi a una nueva posición x′i . Se define el campo
vectorial desplazamiento como
ui = x′i − xi
ui
P´(x´i)
P (x i)
xi
x´i
0
Figura 1: Desplazamiento de un punto material
2
2.2.
Elemento material lineal: Deformación
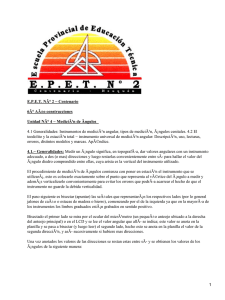
Este elemento es de dimensión infinitesimal y sus extremos tienen coordenadas xi (punto P ) y xi + dxi (punto Q). Sus extremos se desplazan a las
posiciones x′i (P ′) y x′i + dx′i (Q′ ), respectivamente. El desplazamiento de P
es ui y el de Q es ui + dui .
Q´(x i+ dx i+
u i+ du i )
dx´i
u i+ du i
P´(xi + ui )
ui
Q(xi + dx i)
dxi
P (xi )
Figura 2: Desplazamiento de una lı́nea material
De la figura se ve que:
dx′i = −ui + dxi + ui + dui = dxi + dui
Asumiendo que el campo de desplazamiento ui(xj ) es una función continua,
∂ui
dui =
dxj ,
∂uj
que es correcta a primer orden debdio a la pequeñez de dxi . Llamaremos a
∂ui /∂uj tensor de las derivadas de los desplazamientos.
3
Para analizar el tensor, lo separamos en su parte simétrica y antisimétrica,
∂ui
= ei,j + ξi,j
∂uj
donde
1 ∂ui ∂uj
+
ei,j =
2 ∂xj
∂xi
∂uj
1 ∂ui
−
ξi,j =
2 ∂xj
∂xi
1. Parte simétrica ei,j :
a) Consideremos sólo los elementos diagonales (por ejemplo, en el
sistema de ejes principales). Tenemos que:
dui = dx′i − dxi =
∂ui
dxi = ei,i dxi ,
∂xi
con i sin sumar. Luego,
ei,i =
dx′i − dxi
,
dxi
Es decir,
ǫ1
ǫ2
ǫ3
dx′1 − dx1
= e1,1 ,
=
dx1
dx′2 − dx2
=
= e2,2 ,
dx2
dx′3 − dx3
= e3,3 .
=
dx3
Vemos, entonces, que los ei,i están relacionados con la variación
relativa de longitud de los segmentos materiales (elongación o contracción).
4
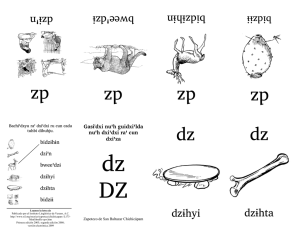
Si se considera el paralelepı́pedo de volumen V = dx1 dx2 dx3 formado por las componentes del elemento material, el volumen después de la deformación V ′ viene dado por:
V ′ = dx′1 dx′2 dx′3
= (1 + e1,1 )dx1 (1 + e2,2 )dx2 (1 + e3,3 )dx3 .
Como las deformaciones son pequeñas, ei,j << 1, entonces a primer orden tenemos que:
V ′ = V (1 + e1,1 + e2,2 + e3,3 ),
de donde,
V′−V
= e1,1 + e2,2 + e3,3 = T r(ei,j )
V
o sea que,
∆V
= ∇u
V
x3
dx3
dx
dx2
x
2
dx1
x
1
Figura 3: Paralelepı́pedo material formado por las componentes de dx.
Nótese que si e1,1 = e2,2 = e3,3 , el elemento material dx no rota,
y el volumen no se deforma. Entonces, un cubo se deformará en
un cubo y una esfera en otra esfera. Sólo cambia el volumen del
elemento material volumétrico, y se tienen sólo compresiones o
expansiones sin cambio de forma.
5
β
y + dy
θ
α
ux
x + uy
δuy dx
δx
uy
y
x
x + ux
x + dx
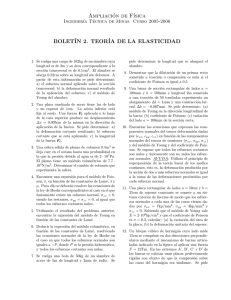
Figura 4: Desplazamiento y variación angular de dos elementos materiales
inicialmente perpendiculares.
b) Consideremos ahora los elementos no diagonales, ei,j con i 6= j. Sin
pérdidad de generalidad, podemos tomar dos elementos materiales
lineales perpendiculares entre sı́.
Asumiendo pequeñas deformaciones, los ángulos α y β vienen dados por:
∂uy
> 0,
∂x
∂ux
> 0.
β ≈ tan β =
∂y
α ≈ tan α =
Después de la deformación el ángulo entre ambos elementos materiales es: π/2 − (α + β). Entonces, la variación ∆θ del ángulo
entre los elementos es:
∂ux ∂uy
∆θ = −(α + β) = −
= −2ex,y ,
+
∂y
∂x
de donde deducimos que los elementos no-diagonales están asociados con las variaciones de los ángulos entre dos segmentos materiales inicialmente perpendiculares. Si ei,j > 0 los ángulos se
cierran, y viceversa.
6
De esta manera, es conveniente describir el tensor de deformación
como:
1
1
ei,j = ek,k δi,j + ei,j − ek,k δi,j
3
3
es decir,
ei,j
1
1
0
= ek,k
3
0
0 0
e1,1 − 13 ek,k
e2,1
1 0 +
e3,1
0 1
e1,2
e2,2 − 13 ek,k
e3,2
e1,3
.
e2,3
1
e3,3 − 3 ek,k
Tal como vimos anteriormente, el primer término de esta expresión corresponde a una compresión o expansión sin cambio de
forma.
Luego, el segundo término da cuenta de los cambios de forma sin
cambios de volumen. En efecto, la traza del segundo término es
idénticamente nula.
7
2. Consideremos finalmente el término antisimétrico, ξi,j : Para ello, tomemos como antes dos elementos materiales mutuamente perpendiculares,
pero veamos cómo es la deformación cuando no se modifica el ángulo
entre sı́.
β
y + dy
α
ux
x + uy
uy
y
x
x + ux
x + dx
Figura 5: Desplazamiento sin variación angular de dos elementos materiales
inicialmente perpendiculares.
De la geometrı́a de la figura vemos que:
∂uy
> 0,
∂x
∂ux
> 0.
β ≈ tan β = −
∂y
α ≈ tan α =
Dado que esta deformación corresponde a ei,j = 0, tenemos que
∂uy
∂ux
=−
,
∂y
∂x
es decir α = β, y el ángulo entre los elementos sigue siendo perpendicular después de la deformación.
8
Por otro lado, vemos que:
ξx,y
x̂
1 ∂ux ∂uy
1 =
= − ∂x
−
2 ∂y
∂x
2
ux
1
1
= − (∇ × u)z = − Ωz ,
2
2
ŷ
∂y
uy
ẑ
∂z
uz
z
(1)
donde hemos definido: Ω = ∇ × u. Las componentes de Ω corresponden
a los ángulos de rotación rı́gida.
En general,
ξi,j
0
1
−Ω
=−
z
2
Ωy
Ωz
0
−Ωx
−Ωy
1
Ωx = − ǫi,j,k Ωk ,
2
0
(2)
donde ǫi,j,k es el tensor de Levi-Civita.
Luego, el diferencial de desplazamiento es (con ei,j = 0):
dui =
∂ui
1
dxj = ξi,j dxj = − ǫi,j,k Ωk dxj ,
∂xj
2
(3)
o, en notación vectorial:
1
du = Ω × dx
2
(4)
Veamos que esta rotación deja invariante al módulo de dx. En efecto,
1
dx′ = dx + du = dx + Ω × dx.
2
(5)
1
1
dx + Ω × dx · dx + Ω × dx = |dx|2
2
2
(6)
de donde,
′ 2
|dx | =
9
Resumiendo todo lo expuesto, podemos enunciar lo siguiente:
El estado de deformación de un medio continuo puede considerarse como
la superposición de:
una expansión o compresión isótropa,
una deformación pura (sin cambio de volumen), y
una rotación pura.
Este resultado se conoce con el nombre de Teorema de Helmholtz.
10
3.
Fuerzas en un medio continuo
Consierando un volumen material V en un medio continuo, pueden distinguirse dos tipos de fuerzas: de volumen y de superficie.
3.1.
Fuerzas de volumen:
No dependen de la interacción del fluido con el volumen considerado, y
por lo tando existirı́an si V estuviera rodeado por el vacı́o. Ejemplos: fuerza
de gravedad, fuerzas ficticias o inerciales, fuerza de Lorentz, etc. Se las define
a través del campo de fuerzas por unidad de masa, G. Ası́, la fuerza sobre V
es:
Z
F = MG = G ρdV,
donde M es la masa encerrada en el volumen V .
3.2.
Fuerzas de superficie:
Dependen de la interacción entre el fluido en V con el fluido adyacente,
y por lo tanto se ejercen a través de la superficie S que encierra a V . Estas
fuerzas pueden tener dos orı́genes:
1. el transporte de cantidad de movimiento por migración de moléculas a
través de S (en gases y lı́quidos),
2. las fuerzas intermoleculares que las moléculas de un lado de S ejercen
sobre las del otro lado (en lı́quidos y sólidos).
11
Es conveniente asociar las fuerzas de superficie a elementos de superficie
planos, dS = dSn̂. Más aún, se suelen expresar las fuerzas de superficie en
términos de los esfuerzos (fuerzas por unidad de longitud), definidos por:
dF(n̂, r, t) = Σ(n̂, r, t)dS
(2)
n^
Σ
(1)
Figura 6: Elemento de superficie infinitesimal con normal n̂ orientada y el
esfuerzo Σ que ejerce el medio (2) sobre el medio (1).
Por el principio de Acción y Reacción, la fuerza ejercida por (1) sobre (2)
debe ser igual y contraria a la ejercida por (2) sobre (1):
Σ(−n̂, r, t) = −Σ(n̂, r, t)
12
Para comenzar a aclarar la relación entre las fuerzas de superficie y su
resultante sobre un elemento material, es útil estudiar la resultante de las
fuerzas de superficie sobre un elemento de caras planas.
^
Σ(n,r
,t)=−dFB /dS
B
n^
^
Σ(n,r
A,t)=−dFA /dS
111111111111111111
000000000000000000
dS
000000000000000000
111111111111111111
B, rB
000000000000000000
111111111111111111
000000000000000000dr
111111111111111111
000000000000000000
111111111111111111
A, rA
Figura 7: Elemento de superficie infinitesimal de caras planas.
La fuerza sobre el elemento debido a la interacción con el medio por
debajo viene dada por:
dFA = −Σ(n̂, rA , t)dS,
mientras que la fuerza debido al medio por encima del elemento es:
dFB =
=
=
=
Σ(n̂, rB , t)dS
Σ(n̂, rA + dr, t)dS
Σ(n̂, rA , t)dS + dr dS [(n̂ · ∇) Σ(n̂, r, t)]rA
−dFA + dr dS [(n̂ · ∇) Σ(n̂, r, t)]rA
Luego, la resultante es:
dF = dFA + dFB = dr dS [(n̂ · ∇) Σ(n̂, r, t)]rA
O sea que los esfuerzos ejercidos sobre ambas caras difieren sólo de términos
del orden de dr y es proporcional a las dervidadas de Σ en la dirección
normal a las caras. Esto es consecuencia del Principio de Acción y Reacción
y de la continuidad asumida para Σ y no depende de la naturaleza fı́sica de
las fuerzas.
Además, nótese que el cociente dF/dm, con dm = ρdrdS la masa del
elemento, es independiente de dr, un hecho fundamental para la validez de
la Hipótesis del Continuo.
13
3.2.1.
El tensor de los esfuerzos
El ejemplo precedente muestra que la Hipótesis del Continuo implica que
las componentes de los esfuerzos están sometidas a ciertas restricciones. A
fin de investigar estas restricciones, consideramos un elemento material más
general, pero limitado por caras planas: el tetraedro de Cauchy.
z
δA
Σ(n)
n
δ Ay
δ Ax
y
δ Az
x
Figura 8: Tetraedro de Cauchy.
En efecto, mostraremos que el esfuerzo Σ(n̂) asociado a un elemento de
superficie está relacionado con sus componentes en los planos coordenados
de forma tal que la resultante sobre un volumen material posea aceleración
finita o nula en el lı́mite de volúmenes infinitésimos.
La resultante de las fuerzas de superficie sobre el tetraedro puede escribirse como:
δR = Σ (n̂)δA + Σ(−x̂) δAx + Σ(−ŷ) δAy + Σ(−ẑ) δAz
= δA [Σ(n̂) − Σ(x̂) x̂ · n̂ − Σ(ŷ) ŷ · n̂ − Σ(ẑ) ẑ · n̂] ,
donde hemos usado:
δAx = δA x̂ · n̂,
δAy = δA ŷ · n̂,
14
δAz = δA ẑ · n̂.
Dado que la masa del tetraedro es
1
δM = ρδV = δAδh,
3
donde δh es la distancia entre la cara δA y el vértice opuesto, la aceleración
del elemento viene dada por:
a=
3
δR
=
[Σ(n̂) − Σ(x̂) x̂ · n̂ − Σ(ŷ) ŷ · n̂ − Σ(ẑ) ẑ · n̂] .
δM
δh
Para δh → 0, a debe mantenerse bien definida en virtud de la Hipótesis
del Continuo. Luego, la expresión entre corchetes debe ser nula en este lı́mite,
de modo que debe satisfacerse:
Σ(n̂) = Σ(x̂) x̂ · n̂ + Σ(ŷ) ŷ · n̂ + Σ(ẑ) ẑ · n̂.
En términos de las componentes cartesianas, tenemos:
Σx (n̂) = Σx (x̂)nx + Σx (ŷ)ny + Σx (ẑ)nz
Σy (n̂) = Σy (x̂)nx + Σy (ŷ)ny + Σy (ẑ)nz
Σz (n̂) = Σz (x̂)nx + Σz (ŷ)ny + Σz (ẑ)nz
(7)
Si definimos,
σi,j = Σi (ĵ),
i, j = x, y, z
podemos resumir las ecuaciones anteriores en:
Σi (n̂) = σi,j nj
Ahora estamos en condiciones de obtener un resultado muy general sobre la resultante de las fuerzas de superficie sobre un volumen finito. Por
definición, ésta es (en componentes)
I
I
Ri =
Σi (n̂) dS =
σi,j nj dS
S(V )
S(V )
Aplicando el teorema de Green,
Ri =
Z
V
∂σi,j
dV,
∂xj
15
de modo que la resultante de las fuerzas de superficie por unidad de volumen
es:
δRi
∂σi,j
=
δV
∂xj
En notación vectorial,
δR
=∇·σ
δV
Vemos, entonces, cómo el tema cierra: la necesidad que las magnitudes
mecánicas macroscópicas cumplan con la Hipótesis del Continuo conduce a
que la resultante de las fuerzas de superficie sobre un elemento de volumen
deba ser proporcional al volumen encerrado, y no al área de la superficie que
lo limita.
Esta exigencia, sumada al carácter intrı́nseco de la relación que debe
existir entre la fuerza ejercida a través de un elemento plano de superficie y
la normal a ésta (tetraedro de Cauchy), implica que la entidad matemática
adecuada para representar las fuerzas de superficie es el flujo de un tensor de
rango dos: el tensor de los esfuerzos, σi,j .
3.3.
Simetrı́a del tensor de los esfuerzos
......
16
 0
0