- Ninguna Categoria
Solución - IES Francisco Ayala
Anuncio
I.E.S. “CASTELAR” BADAJOZ
PRUEBA DE ACCESO (LOGSE)
UNIVERSIDAD DE VALENCIA
SEPTIEMBRE – 2007
(RESUELTOS por Antonio Menguiano)
MATEMÁTICAS II
Tiempo máximo: 1 hora y 30 minutos
Se elegirán TRES bloque y se hará un problema de cada uno de ellos.
Cada estudiante podrá disponer de una calculadora científica o gráfica. Se prohíbe su
utilización indebida (guardar fórmulas o texto en memoria). Se utilice o no la calculadora, los resultados analíticos y gráficos deberán estar debidamente justificados.
BLOQUE 1.- ÁLGEBRA LINEAL.
6 x + 3 y + 2 z = 5
1º) Dado el sistema de ecuaciones lineales 3 x + 4 y + 6 z = 3 , se pide:
x + 3 y + 2z = α
a ) Justificar que para cualquier valor del parámetro α , el sistema tiene solución única.
b ) Hallar la solución del sistema en función del parámetro α .
c ) Determinar el valor de α para que la solución (x, y, z) del sistema satisface la ecuación x + y + z = 1 .
---------a)
Para que el sistema tenga solución única es condición suficiente que el determinante de la matriz de coeficientes sea tres. Según el Teorema de Rouché-Fröbenius, un
sistema es compatible determinado cuando el rango de las matrices de coeficientes y
ampliada son iguales e iguales al número de incógnitas y, en este caso el número de incógnitas es tres y el rango de la matriz ampliada no puede ser mayor que tres, cualquiera
que sea el valor del parámetro α .
6 3 2
La matriz de coeficientes es M = 3 4 6 .
1 3 2
6 3 2
Rango M ⇒ 3 4 6 = 48 + 18 + 18 − 8 − 108 − 18 = 84 − 134 = −50 ≠ 0 ⇒ Rango M = 3
1 3 2
A. Menguiano
El sistema tiene solución única (es Compatible Deter min ado), c.q. j.
b)
Resolvemos aplicando la Regla de Cramer.
x=
5
3 2
5
3 1
3
4 6
3 2
3
4 3
3 1
α
− 50
6
y=
α
− 25
5
2
6
3 3
1 α
6
2
3 3 3
1 α 1
− 50
6 3
z=
=
20 + 9 + 9α − 4α − 45 − 9 5α − 25 5 − α
=
=
=x
− 25
− 25
5
=
18 + 3α + 15 − 3 − 18α − 15 − 15α + 15 3α − 3
=
=
=y
− 25
− 25
5
5 1
− 25
5
3 4 3
1 3 α
− 50
=
=
=
24α + 45 + 9 − 20 − 54 − 9α 15α − 20 4 − 3α
=
=
=z
− 50
− 50
10
c)
Para que la solución cumpla que x + y + z = 1 tiene que ser:
5 − α 3α − 3 4 − 3α
= 1 ; ; 2(5 − α ) + 2(3α − 3) + 4 − 3α = 10 ; ;
+
+
5
5
10
10 − 2α + 6α − 6 + 4 − 3α = 10 ; ; α − 2 = 0 ⇒ α = 2
**********
6
4
x
y X = , se pide:
2º) Dadas las matrices A =
−1 1
y
0
a ) Obtener razonadamente todos los valores de α para los que es la única solución
0
de la ecuación matricial A · X = α · X .
b ) Resolver la ecuación matricial A · X = 2 X .
---------a)
6 4 x
· = α
A · X = α · X ⇒
−1 1 y
6 x + 4 y = αx
x
6 x + 4 y αx
= ⇒
· ; ;
− x + y = αy
y
− x + y αy
(6 − α )x + 4 y = 0
.
− x + (1 − α ) y = 0
Se trata de un sistema homogéneo que, para que tenga solamente la solución trivial x = 0, y = 0 es necesario que el rango de la matriz de coeficientes tenga de rango
dos.
6 −α
La matriz de coeficientes es M =
−1
Rango M ⇒
=
6 −α
4
−1
1−α
4
.
1 − α
= 6 − 6α − α + α 2 + 4 = 0 ; ; α 2 − 7α + 10 = 0. α =
7 ± 49 − 40
=
2
7± 9 7±3
=
⇒ α 1 = 2 ; ; α 2 = 5 ⇒ α 2 − 7α + 10 ≠ 0 para α ≠ 2 y α ≠ 5 .
2
2
0
Las soluciones para las que se produce son ∀α ∈ R − {2, 5}
0
b)
6 x + 4 y = 2 x
6 4 x
x
6x + 4 y 2x
· = 2 · ; ;
= ⇒
A · X = 2 · X ⇒
− x + y = 2y
−1 1 y
y
− x + y 2y
4 x + 4 y = 0 x + y = 0
⇒ x+ y =0
− x − y = 0 x + y = 0
**********
BLOQUE 2.- GEOMETRÍA.
1º) Dado el plano π ≡ 2 x + y + 3z − 1 = 0 y el punto Q(2, 1, 3), se pide calcular:
a ) La distancia del punto Q al plano π .
b ) El área del triángulo cuyos vértices P1 , P2 y P3 son los puntos de intersección del
plano π con los ejes coordenados.
c ) El volumen del tetraedro de vértices P1 , P2 , P3 y Q .
---------a)
La distancia de un punto P0 (x 0 , y 0 , z 0 ) a un plano α ≡ Ax + By + Cz + D = 0 viene
dado por la fórmula: d (P0 , α ) =
Ax 0 + By 0 + Cz 0 + D
A2 + B 2 + C 2
.
Considerando el punto Q(2, 1, 3) y el plano π ≡ 2 x + y + 3z − 1 = 0 es:
d (Q, π ) =
2 · 2 +1 · 1 + 3 · 3 −1
2 2 + 12 + 3 2
=
4 +1 + 9 −1
4 +1+ 9
=
13 13 14
=
unidades = d (Q, π )
14
14
b)
Los puntos de corte del plano π ≡ 2 x + y + 3z − 1 = 0 con los ejes coordenados son:
y = 0
x = 0
x = 0
1
X ⇒
→ P1 ( 2 , 0, 0) ; ; Y ⇒
→ P2 (0, 1, 0 ) ; ; Z ⇒
→ P3 (0, 0,
z = 0
z = 0
y = 0
1
3
)
Los vectores que determinan el triángulo son:
u = P1 P2 = P2 − P1 = (0, 1, 0) − ( 12 , 0, 0) = (− 12 , 1, 0)
v = P1 P3 = P3 − P1 = (0, 0,
1
3
) − ( 12 ,
0, 0) = (− 12 , 0,
1
3
)
El área de un triángulo es la mitad del área del paralelogramo que determinan dos
vectores y el área del paralelogramo, a su vez, es el módulo del producto vectorial de
los dos vectores, por lo cual:
SPP P
1 2 3
i
1
1
= · u ∧ v = · − 12
2
2
− 12
j k
1 1
1
1
1
1 0 = · i+ k+ j =
· 2i + j + 3k =
2
3
2
6
12
0 13
=
1
1
14 2
2 2 + 12 + 3 2 =
· 14 =
u = SPP P
12
12
12
1 2 3
c)
Considerando el vector w = P1Q = Q − P1 = (2, 1, 3) − ( 12 , 0, 0 ) = ( 32 , 1, 3) , los vec-
tores u , v y w determinan un paralelepípedo cuya base es el triángulo considerado
anteriormente y cuya arista lateral la constituye el vector w .
Sabiendo que el volumen de un tetraedro es un sexto del volumen del paralelepípedo que determinan los mismos vectores que definen al tetraedro, es decir, un sexto
del producto mixto de los vectores u , v y w , en valor absoluto:
VTETRAEDRO
− 12
1
1
= · V PARALELEPÍ PEDO = · − 12
6
6
3
2
=
1 0
1 1 1 3
1
0 13 = · + + =
· 3 +1+ 9 =
6 2 6 2
36
1 3
1
13 3
· 13 =
u = VTETRAEDRO
36
36
**********
2º) Dados los planos π 1 ≡ x + 2 y + z + 3 = 0 y π 2 ≡ 2 x + y − z − 6 = 0 , se pide:
a ) Calcular el ángulo α que forman los planos π 1 y π 2 .
b ) Calcular las ecuaciones paramétricas de la recta r, que es la intersección de los planos π 1 y π 2 .
c ) Comprobar que el plano π ≡ x + y − 1 = 0 es el plano bisector de π 1 y π 2 , es decir,
π forma un ángulo α / 2 con cada uno de los planos π 1 y π 2 , donde α es el ángulo
obtenido en el apartado a ).
---------a)
El ángulo que forman dos planos es el mismo que forman sus vectores normales.
Los vectores normales de los planos son n1 = (1, 2, 1) y n 2 = (2, 1, − 1) .
Sabiendo que el ángulo que forman dos vectores se deduce del concepto de proa · b
ducto escalar: a · b = a · b · cos α ⇒ cos α =
.
a · b
Aplicando la fórmula a los vectores n1 = (1, 2, 1) y n 2 = (2, 1, − 1) :
cos α =
n1 · n 2
n1 · n 2
=
(1,
2, 1) · (2, 1, − 1)
12 + 2 2 + 12 · 2 2 + 12 + (− 1)
2
=
2 + 2 −1 3 1
= =
⇒ α = 60º
6· 6 6 2
b)
x + 2 y + z + 3 = 0
.
2
x
+
y
−
z
−
6
=
0
Las ecuaciones implícitas de r son r ≡
Parametrizando una de las incógnitas y operando:
x + 2 y = −3 − λ 2 x + 4 y = −6 − 2λ
x + 2 y + z + 3 = 0
r≡
⇒ z=λ ⇒
⇒
2 x + y = 6 + λ − 2 x − y = −6 − λ
2 x + y − z − 6 = 0
⇒ 3 y = −12 − 3λ ; ; y = −4 − λ ; ; x = −2 y − 3 − λ = 8 + 2λ − 3 − λ = 5 + λ = x
x = 5 + λ
r ≡ y = −4 − λ
z = λ
c)
El plano bisector de dos planos dados es el lugar geométrico de los puntos que
equidistan de los dos planos.
La distancia de un punto P0 (x 0 , y 0 , z 0 ) a un plano α ≡ Ax + By + Cz + D = 0 viene
dado por la fórmula: d (P0 , α ) =
Ax 0 + By 0 + Cz 0 + D
A2 + B 2 + C 2
.
Siendo P(x, y, z) un punto perteneciente al plano bisector seria:
x + 2y + z + 3
d (P , π 1 ) = d ( P , π 2 ) ⇒
x + 2y + z + 3
6
=
12 + 2 2 + 12
2x + y − z − 6
6
=
2x + y − z − 6
2 2 + 12 + (− 1)
2
;;
; ; x + 2 y + z + 3 = 2 x + y − z − 6 ⇒ Dos soluciones ⇒
π ' ≡ x + 2 y + z + 3 = 2 x + y − z − 6 = 0 ; ; π ' ≡ x − y − 2 z − 9 = 0
⇒
π ' ' ≡ x + 2 y + z + 3 = −2 x − y + z + 6 = 0 ; ; π ' ' ≡ 3 x + 3 y − 3 = 0 ; ; π ' ' ≡ x + y − 1 = 0
En efecto : el plano π ≡ x + y − 1 = 0 es bi sec tor de π 1 y π 2 , c.q.c.
**********
BLOQUE 3.- ANÁLISIS.
1º) Dadas las funciones reales f (x ) = 4 x 2 + 2 x + 10 y g ( x ) = x 3 + x 2 + 5 x + 5 , se pide:
a ) Determinar las ecuaciones de las asíntotas a la gráfica de la función h(x ) =
b ) Calcular la función H (x ) = ∫
f (x )
· dx que cumple que H(0) = 0.
g (x )
f (x )
.
g (x )
---------a)
f (x )
4 x 2 + 2 x + 10
La función h(x ) =
=
tiene como asíntota horizontal la recta
g (x ) x 3 + x 2 + 5 x + 5
lím
lím
4 x 2 + 2 x + 10
y = 0 (eje X), por ser y = k =
h( x ) =
= 0.
x → ±∞
x → ±∞ x 3 + x 2 + 5 x + 5
Las asíntotas verticales son los valores de x que anulan el denominador y, como
toda ecuación grado impar tiene al menos una solución, la función h(x) tiene por lo menos una asíntota vertical.
Resolvemos por Ruffini la ecuación x 3 + x 2 + 5 x + 5 = 0 :
Por ser todos los coeficientes positivos, probamos con un valor negativo, (-1):
1
-1
1
1
-1
0
5
0
5
5
-5
0
La recta x = −1 es asíntota vertical de la función h( x) .
Para que una función racional tenga asíntota oblicua es necesario que el numerador tenga de grado una unidad menos que el denominador, por lo tanto:
La función h(x) no tiene asíntotas oblicuas.
b)
Teniendo en cuenta la descomposición del denominador, la integral pedida es:
H (x ) = ∫
f (x )
4 x 2 + 2 x + 10
4 x 2 + 2 x + 10
· dx = ∫ 3
·
dx
=
∫ (x + 1)(x 2 + 5) · dx ⇒
g (x )
x + x 2 + 5x + 5
4 x 2 + 2 x + 10
4 x 2 + 2 x + 10
A
Bx + C A(x 2 + 5) + ( x + 1)(Bx + C )
=
=
+
=
=
x 3 + x 2 + 5 x + 5 ( x + 1)(x 2 + 5) x + 1 x 2 + 5
x 3 + x 2 + 5x + 5
Ax 2 + 5 A + Bx 2 + Cx + Bx + C ( A + B )x 2 + (B + C )x + (5 A + C )
=
=
⇒
x 3 + x 2 + 5x + 5
x 3 + x 2 + 5x + 5
⇒C = 2 − B⇒
⇒ H (x ) = ∫
I =∫
A+ B = 4
B+C = 2 ⇒
5 A + C = 10
A + B = 4 A + B = 4
⇒ 6 A = 12 ; ; A = 2 ; ; B = 2 ; ; C = 0 ⇒
5 A + (2 − B ) = 10 5 A − B = 8
f (x )
2x
1
2x
2
· dx = ∫
+ 2
dx + ∫ 2
dx = 2 I 1 + I 2
dx = 2∫
g (x )
x +1
x +5
x +1 x + 5
1
dx = L x + 1 = I 1
x +1
x2 + 5 = t
2x
dt
2
I2 = ∫ 2
dx ⇒
⇒ I2 = ∫ = L t = L x + 5 = I2
x +5
t
2 x · dx = dt
Sustituyendo en (*) resulta:
[
]
H ( x ) = 2 L x + 1 + L x 2 + 5 + K = L ( x + 1) (x 2 + 5) + K = H ( x )
2
Teniendo en cuenta que H(0) = 0, sería:
[
]
H (0) = 0 ⇒ L (0 + 1) (0 2 + 5) + K = 0 ; ; L (1 · 5) + k = 0 ; ; K = − L 5
2
H (x ) = 2 L x + 1 + L x 2 + 5 − L 5
2
(
x + 1) (x 2 + 5)
H (x ) = L
5
**********
(*)
2º) Sea la función con dominio los números reales no nulos f (x ) = .
4
x
a ) Calcular la ecuación de la recta tangente y de la recta normal a la gráfica de f(x) en el
punto de abscisa x = 2.
b ) Determinar los puntos M y N de la gráfica de f(x) para los que las rectas tangentes a
la gráfica en M y N se cortan en el punto P(4, -8).
---------a)
La pendiente de la recta tangente a una función en un punto es el valor de la derivada de la función en ese punto; teniendo en cuenta que la recta normal es perpendicular
a la tangente, su pendiente es la inversa de signo contrario de la tangente.
f ' (x ) = −
4
4
4
⇒ m = f ' (2 ) = − 2 = − = − 1 = m ; ; m' = 1
2
x
2
4
El punto de tangencia es el siguiente: f (2 ) =
4
= 2 ⇒ A(2, 2 ) .
2
Sabiendo que la ecuación de una recta conocidos el punto y la pendiente viene
dada por la fórmula y − y 0 = m(x − x 0 ) , las ecuaciones de las rectas tangente y normal
son las siguientes:
Re cta tan gente : t ≡ y − 2 = −1( x − 2 ) = − x + 2 ; ; t ≡ x + y − 4 = 0
Re cta normal : n ≡ y − 2 = 1( x − 2 ) = x − 2 ; ; n ≡ x − y = 0
b)
El haz de rectas que pasan por el punto P(4, -8) es: y + 8 = m(x − 4) .
Si tienen que cumplir que son tangentes a la función su pendiente tiene que ser la
derivada de la función.
Teniendo en cuenta que y = f (x ) =
nérico de la función es P x,
4
4
y que m = f ' ( x ) = − 2 y que un punto gex
x
4
sería:
x
4
4
+ 8 = − 2 ( x − 4) ; ; 4 x + 8 x 2 = −4( x − 4) = −4 x + 16 ; ; 8 x 2 + 8 x − 16 = 0 ; ; x 2 + x − 2 = 0
x
x
x=
x1 = 1
−1± 1+ 8 −1± 9 −1 ± 3
⇒
=
=
2
2
2
x 2 = −2
4
x
=
1
→
y
=
= 4 ⇒ M (1, 4)
1
Los puntos pedidos son ⇒
x = −2 → y = 4 = −2 ⇒ N (− 2, − 2 )
−2
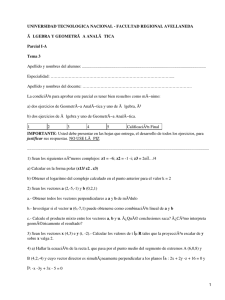
Para ilustrar le resolución del problema hacemos una representación gráfica aproximada de la situación:
Y
M
A
t2
f(x)
O
N
t
t1
P
**********
X
BLOQUE 4.- RESOLUCIÓN DE PROBLEMAS.
1º) Se tienen dos programas informáticos A y B. Para procesar n datos, el programa A
realiza un número de operaciones elementales no superior a 12 + n 4 n 3 , mientras que el
programa B ejecuta n 2 − 2n + 10 operaciones elementales. Comprobar que cuando el
número n de datos es grande, el programa A procesa los n datos con menos operaciones
elementales que el programa B.
---------Lo que el problema nos pide es demostrar que para n suficientemente grande tie12 + n 4 n 3
< 1.
n 2 − 2n + 10
ne que ser 12 + n 4 n 3 < n 2 − 2n + 10 , o lo que es lo mismo:
Tomando límites del cociente cuando n tiende a infinito, el resultado tiene que ser
menor que 1:
7
12 + n 4
lím 12 + n 4 n 3
lím
lím
lím
12 + 4 n 7
12 + n
n2
=
=
=
=
n → ∞ n 2 − 2n + 10 n → ∞ n 2 − 2n + 10 n → ∞ n 2 − 2n + 10 n → ∞ n 2 − 2n + 10
n2
12 1
+ 1
12 1
2
+
n
4
lím
n
∞
∞ = 0+0 = 0 = 0 <1
=
=
2 10
2 10 1 − 0 + 0 1
n→∞
1− + 2 1− +
n n
∞ ∞
7
4
Lo anterior demuestra lo pedido.
**********
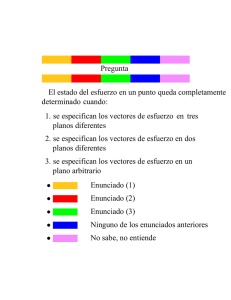
2º) El borde de un estanque está formado por el arco de curva y = 4 − x 2 de extremos
A(-2, 0) y B(2, 0) y el segmento rectilíneo que une estos dos puntos. Un surtidor está
situado en el punto de coordenadas S(0, 2). Se pide:
a ) Determinar, razonadamente, el punto del segmento rectilíneo del borde del estanque
que está más próximo del surtidor.
b ) Determinar, razonadamente, los puntos del arco de curva del borde del estanque que
están más próximos del surtidor.
c ) ¿Cuáles son los puntos del borde del estanque más próximos al surtidor?
---------a)
Y
y = 4 – x2
V
Q’
Q
S
A
B
O
X
El borde rectilíneo del estanque es el segmento AB perteneciente a la recta y = 0;
sus puntos tienen por expresión P(x, 0).
Se trata de averiguar el punto P’(x, 0) cuya distancia al punto S(0, 2) sea mínima.
d SP ' = SP ' =
( x − 0)2 + (0 − 2)2
=
x 2 + 4 ; ; d ' SP ' =
2x
2 x +4
2
= 0 ⇒ 2x = 0 ;; x = 0
Como cabía esperar, el punto más próximo al surtidor es O(0, 0).
b)
Los puntos del arco de curva tienen por expresión Q(x, 4 − x 2 ) .
La distancia de cualquiera de sus puntos al punto S(0, 2) es:
(0 − x )2 + [2 − (4 − x 2 )]2
d SQ = QS =
x 2 + (− 2 + x 2 ) =
=
x 2 + (x 2 − 2) .
2
2
Para que la distancia sea mínima es condición necesaria que su derivada sea cero:
2 x + 2 · (x 2 − 2 ) · 2 x
d ' QS =
=
2 x 2 + (x 2 − 2 )
2
x + 2x 3 − 4x
x 2 + (x 2 − 2 )
2
x(2 x 2 − 3) = 0 ⇒ x1 = 0 ; ; x 2 = +
2 x 3 − 3x
=
x 2 + (x 2 − 2)
2
= 0 ⇒ 2 x 3 − 3x = 0 ; ;
3
6
6
=
= x 2 ; ; x3 = −
2
2
2
De la observación de la figura se deduce que para x = 0 la distancia al punto S no
es mínima, por lo cual vamos a justificar, mediante la segunda derivada, que para x = 0
la segunda derivada no es positiva, que es condición necesaria para mínimo:
(6 x
− 3) ·
2
x + (x − 2 ) − (2 x − 3 x ) ·
2
2
2
d ' ' QS =
(6 x
x 2 + (x 2 − 2)2
− 3) ·
2
3
x + (x − 2) − (2 x − 3x ) ·
2
=
2
2
3
x 2 + (x 2 − 2 )
2 x 2 + (x 2 − 2 )
2
2
2
[
]
− 3) x 2 + (x 2 − 2) − (2 x 3 − 3x )
2
x 2 + (x 2 − 2)
2
=
2
x 2 + (x 2 − 2 )
2
=
x 2 + (x 2 − 2 )
2
=
(6 x
2
− 3)(x 4 − 3 x 2 + 4 ) − (4 x 6 − 12 x 4 + 9 x 2 )
(x
2
+ x − 4 x + 4) x + (x − 2 )
4
6 x 6 − 18 x 4 + 24 x 2 − 3x 4 + 9 x 2 − 12 − 4 x 6 + 12 x 4 − 9 x 2
(x
d ' 'QS (0 ) =
2
=
2 x 3 − 3x
2
(6 x
=
2 x + 2 · (x 2 − 2 ) · 2 x
+ x 4 − 4 x 2 + 4 ) x 2 + (x 2 − 2 )
2
2
=
(x
2
2
2
=
2 x 6 − 9 x 4 + 24 x 2 − 12
4
− 3x 2 + 4 ) x 4 − 3 x 2 + 4
− 12
< 0 ⇒ Para x = 0 no es distancia mínima.
4 4
Por el contrario, para los valores x = ±
6
la segunda derivada resulta positiva,
2
como comprobamos a continuación:
d ' ' QS
( )
3
2
27 81
54 96 − 54
− + 36 − 12
24 −
42
84
4
4
4 =
4
=
=
=
=
> 0 ⇒ Mínimo
55 55 55 55 55 55 55 55
9 9
9 9
− +4
− + 4
2
4 4
4 4
4 2
4 2
Los puntos pedidos son los siguientes, teniendo en cuenta que la función es simé-
trica con respecto al eje de ordenadas:
y
( )
6
2
2
6
6 5
6
3 5
6 5
= 4− = 4− =
y Q' −
= 4 −
⇒
,
Q
2 2
2 , 2
2
4
2
2
c)
Se trata de comparar las distancias d OS = 2 y d SQ =
6
.
2
Es evidente que d OS > d SQ , por lo cual:
Los puntos más próximos al surtidor son Q y Q’.
**********
 0
0
Anuncio
Documentos relacionados







Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados