Controlabilidad
Anuncio

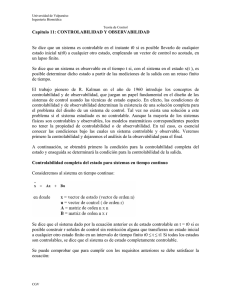
Controlabilidad Tres características importantes en sistemas de control 1. Controlabilidad. 2. Observabilidad. 3. Estabilidad. Nota. Para poder controlar un sistema sin problemas se requiere al menos dos de estas características. Controlabilidad y observabilidad Controlabilidad. Un sistema es controlable si existe un control que transfiera el estado de x (t0 ) a cualquier otro estado. Observabilidad. Un sistema es observable si es posible determinar el estado inicial x (t0 ) a través de mediciones de la salida. I La existencia de una solución completa depende de si el sistema es controlable y observable. I La solución puede no existir si el sistema es no controlable. Excurso Figure 1: Rudolph E. Kálmán (n. 1930) I Kálmán introdujo ambos conceptos. Desviación: Teorema Cayley–Hamilton I Sea la matriz A ∈ Rn×n y con ecuación caracterísitca 1. |λI − A| = λn + a1 λn−1 + · · · + an−1 λ + an = 0 I Entonces A satisface su propia ecuación 2. An + a1 An−1 + · · · + an−1 A + an I = 0. Resultado importante I Se puede definir un polinomio matricial tal que 3. e At = α0 (t)I + α1 (t)A + α2 (t)A2 + αm−1 (t)Am−1 donde m ≤ n. Definición formal de controlabilidad completa en sistemas LTI continuos I Sea el sistema 4. ẋ = Ax + Bu donde x ∈ Rn×n es el vector del estado, u ∈ R es la señal de control. I Se dice que el sistema (4) es controlable en t = t0 , si es posible construir una señal de control sin restricciones que transfiera un estado inicial a cualquier estado final en un intervalo finito t0 ≤ t ≤ t1 . Definición formal (II) I I Sin perder generalidad, se asume que x(t1 ) = 0 y t0 = 0. Entonces, aplicando la solución de x(t) para t = t1 5. x(t1 ) = e At1 x(0) + I R t1 A(t −τ ) 1 Bu(τ ) dτ = 0 0 e Lo que es igual 6. x(0) = − R t1 −Aτ Bu(τ ) dτ 0 e Definición formal (III) I Tomando en cuenta (3) se tiene que 7. e −Aτ = I Pn−1 k=0 αk (τ )A k Combinando (6) y (7) se tiene 8. x(0) = − k R t1 k=0 A B 0 Pn−1 αk (τ )u(τ ) dτ Definición formal (IV) I Si se define 9. βk = I R t1 0 αk (τ )u(τ ) dτ Entonces 10. x(0) = − Pn−1 k k=0 A Bβk 11. x(0) = − B AB · · · An−1 B β0 β1 .. . βn−1 Condición de controlabilidad completa I Sea la matriz 12. C = B AB · · · I An−1 B La matriz C debe ser de rango pleno (no singular). Controlabilidad de la salida I En ocasiones lo que interesa es controlar la salida. 13. Definición. Un sistema es de salida controlable completamente si es posible construir un vector de control sin restricciones u(t) que transfiera cualquier salida inicial y(t0 ) a cualquier salida final y(t1 ) en un intervalo de tiempo finito t0 ≤ t ≤ t1 . Controlabilidad de la salida (II) 14. Teorema. Sea el sistema ẋ = Ax + Bu y = Cx + Du, donde x ∈ Rn , u ∈ Rr y y ∈ Rm . El sistema es de salida completamente controlable si y sólo si la matriz m × (n + 1)r CB CAB CA2 B · · · es de rango m. CAn−1 B D Sistema no controlable Un sistema se dice no controlable si tiene un subsistema que esta desconectado de la entrada. Estabilizabilidad 15. Definición. Un sistema parcialmente controlable se dice estabilizable si los modos no controlables son estables y los modos no estables son controlables. 16. Ejemplo. ! ẋ = ! 1 0 1 u x+ 0 0 −1