Trabajo Práctico Obligatorio 1 - Ingeniería en Automatización y
Anuncio

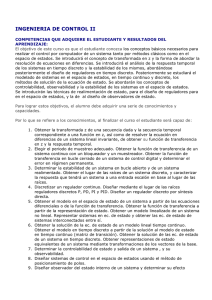
Universidad Nacional de Quilmes Ingenierı́a en Automatización y Control Industrial Segundo Cuatrimestre de 2013 Control Automático 2 Trabajo Práctico Obligatorio 1 El trabajo es de carácter individual y de entrega necesaria (no suficiente) para acceder a la aprobación de la materia. Fecha de lı́mite de entrega: 22 de Octubre. 1. Suponga el sistema que muestra la Figura 1 Figura 1: Sistema del ejercicio 1. en donde, 0= con α = pide: d θ L J d + m r̈ + mg sin( θ) − mr(α̇)2 R2 L (las referencias y valores numéricos se muestran en la Tabla 1). Se a) Linealizar entorno al equilibrio. b) Discretizar de forma exacta. c) Simular el sistema real y el discretizado. d ) Con el uso de Matlab, graficar el diagrama de fase. Obtener conclusiones. e) Estudie controlabilidad y observabilidad del sistema. Obtener conclusiones. 2. Diseño: 1 M R d g L J r α θ Masa de la bola Radio de la bola Desplazamiento desde el eje del brazo Aceleración de la gravedad Largo del brazo Momento de Inercia de la bola Posición de la bola Angulo del brazo Angulo de la rueda 0,11 Kg 0,015 m 0,03 m 9,8 m/s2 1m −6 9,99 × 10 kgm2 Cuadro 1: Valores númericos y referencias del ejercicio 1 a) Diseñe, mediante asignación de polos (técnicas vistas en Control Automático 1), un controlador tal que este defina una ganancia de continua unitaria para el sistema a lazo cerrado (T0 (s)). b) Discretize el controlador obtenido mediante una discretazación exacta. c) Implemente este controlador en simulación (controle el sistema real). Evalúe la ”robustez ”del controlador perturbando al sistema. d ) Tenga en cuenta que ocurre en los instantes que van entre dos muestras consecutivas. Saque conclusiones. e) Piense como implementarı́a este controlador en un microcontrolador. Opcional: f ) En un script de Matlab (o cualquier otro software de cálculo) implemente una rutina que simule la implementación digital en un microcontrolador (estructura for ). 3. Analizar la estabilidad a través de la ecuación de Lyapunov, del sistema cuya matriz de estados viene dada por: 0 1 A = −0,5 1 Nota: realiza los cálculos manualmente, luego verifique en Matlab. 4. Los tests de autovectores de Popov-Belevitch-Hautus (PBH) dan condiciones necesarias y suficientes para la controlabilidad y observabilidad de un sistema lineal estacionario definido por (A, B, C). Test PBH de Controlabilidad. Un sistema lineal estacionario es controlable si y solo si, para todo autovector izquierdo v de A (v T A = λv T ) se cumple que v T B 6= 0. Test PBH de Observabilidad. Un sistema lineal estacionario es observable si y solo si para todo autovector derecho u de A (Au = λu) se cumple que Cu 6= 0. Usando los resultados de Popov-Belevitch-Hautus, se pide: a) Mostrar que la controlabilidad es una propiedad invariante con respecto a la realimentación de estados: si el par (A,B) es controlable, entonces el par (A + BK, B) es controlable para cualquier K. b) Mostrar que la observabilidad no es una propiedad invariante con respecto a la realimentación de estados: si el par (A,C) es observable, el par (A + BK,C) puede no ser observable para algún K. 2