Apellidos, Nombre:
Sistemas Automáticos
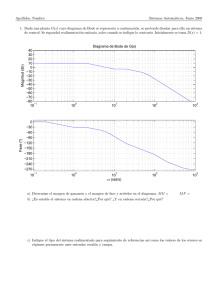
1. Dado el diagrama de Bode de G(s) para un sistema de control con realimentación unitaria:
Magnitud (db)
Diagrama de Bode
20
10
0
−10
−20
−30
−40
−50
−60
−70
−80
−90
−100
−1
10
0
10
1
10
2
10
3
10
−60
−90
Fase (º)
−120
−150
−180
−210
−240
−270
−1
0
10
10
1
10
ω (rad/s)
2
10
a) Determine el margen de ganancia y el margen de fase. Indı́quelos en el diagrama.
b) Diseñe el controlador más sencillo que consiga ev ≤ 0,1s y M F ≥ 60o .
c) Diseñe el controlador más sencillo que consiga ωcg ≥ 30rad/s y M F ≥ 45o .
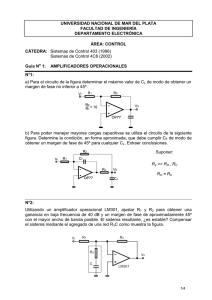
Maximum phase lead
90⬚
60⬚
30⬚
0⬚
1
2
4
6 8 10
1
a
20
40 60 100
3
10
2. Suponga que ha encontrado dos soluciones al control de un sistema, una con una red de adelanto y otra con una
red de atraso. Explique las ventajas e inconvenientes de decantarse bien por una, bien por otra.
3. Cuando diseña en frecuencia:
a) ¿Qué condición se impone a la función de lazo L(jw) para que los errores de seguimiento de referencias sean
pequeños?
b) ¿Qué condición se impone a la función de lazo L(jw) para reducir el riesgo de inestabilidades procedente de
las incertidumbres en el modelo del proceso?
c) ¿Qué problemas puede acarrear el intentar cumplir simultaneamente ambas condiciones, especialmente si son
muy restrictivas durante amplios rangos de frecuencia?
4. Para el sistema del ejercicio 1, con el controlador del apartado 3.
a) Elija un perı́odo de muestreo adecuado para discretizar el controlador analógico.
b) ¿Qué rango de valores de perı́odo de muestreo puede utilizar sin que el sistema se vuelva inestable?
 0
0