Clase05-02
Anuncio

Universidad Nacional de Ingenierı́a - Facultad de Ingenierı́a Mecánica
Departamento Académico de Ingenierı́a Aplicada
CONTROL MODERNO Y ÓPTIMO (MT 227C)
Clase05-02
Elizabeth Villota Cerna
30/04/2010
Semestre 2010I - UNI
El mundo real es no lineal, sin embargo existen un número de razones para investigar sistemas lineales.
Los sistemas lineales se usan a menudo para aproximar sistemas no lineales. Muchas veces, esta aproximación
es suficiente para el diseño del controlador. El conocimiento de la teorı́a de sistemas lineales ayuda también
a entender la complicada teorı́a de sistemas no lineales.
En esta parte, analizaremos más conceptos básicos de sistemas lineales. La forma general del sistema
lineal en la forma de espacio de estados, con correspondiente ecuación de salida, es:
dx
dt
y
= Ax + Bu,
(1)
= Cx + Du,
donde A ∈ Rn×n , B ∈ Rn×m , C ∈ Rp×n y D ∈ Rp×m .
1.
Controlabilidad
Decimos que el sistema dinámico descrito por la ecuación (1) o el par n-dimensional (A, B) es controlable
si existe una ley de control u(t) que transfiere cualquier estado inicial xo = x(to ) en cualquier tiempo to a un
estado final xf = x(tf ) del espacio de estados en un tiempo tf > to . De otra forma, el sistema o par (A, B)
en no controlable.
Teorema 1 Las siguientes condiciones son equivalentes:
1. El par n-dimensional (A, B) es controlable.
2. La matriz de controlabilidad n × nm
Wc =
tiene rango de fila completo.
B
AB
An−1 B
...
=n
3. Las n filas de la matriz e−At B son linealmente independientes para todo t ∈ [0, ∞).
4. La matriz
Vc (t) =
Z
t
e−Aτ BB T e−A
0
es no singular para todo t > 0.
T
τ
dτ =
Z
t
e−A(t−τ ) BB T e−A
T
(t−τ )
dτ
0
⋄
Demostración Probando la implicación 1 → 2; esto es, si el par (A, B) es controlable entonces la llamada
matriz de controlabilidad
B AB ... An−1 B ∈ Rn×mn
es de rangode fila completo. Probaremos
este enunciado por contradicción (∼ 2 →∼ 1). Entonces, asumimos
que: rango B AB ... An−1 B < n; entonces, existe una vector constante de orden n, q 6= 0 tal que:
q T B = 0T , q T AB = 0T , ...q T An−1 B = 0T .
Por el teorema de Cayley-Hamilton, la matriz A satisface su propia ecuación caracterı́stica. Entonces:
An = −an−1 An−1 − ... − a1 A − ao In .
CONTROL POR REALIMENTACIÓN DE ESTADOS/CONTROLABILIDAD
Luego:
q T An B = 0T = q T (−an−1 An−1 B − ... − a1 AB − ao B) = 0T .
Por inducción obtenemos:
q T Ai B = 0T ,
para i = n + 1, n + 2, ...
Ahora sea x(0) = 0 y x(tf ) = q. Ahora mostraremos que no existe ley de control que transfiera al sistema
de x(0) = 0 a x(tf ) = q. De la solución de la ecuación espacio de estados obtenemos:
q = eA(tf −to ) x(0) +
Z
tf
eA(tf −τ ) Bu(τ )dτ
to
q=
Z
tf
eA(tf −τ ) Bu(τ )dτ.
0
Ahora premultiplicamos la ecuación resultante por q T para obtener:
Z tf
2
q T eA(tf −τ ) Bu(τ )dτ = 0
0 6= kqk =
0
porque
q T eA(tf −τ ) B = q T
B + (tf − τ )AB +
(tf − τ 2 ) 2
A B − ... = 0T .
2!
Luego el sistema no puede ser transferido desde x(0) = 0 hasta x(tf ) = q, y luego el sistema ẋ = Ax + Bu
es no controlable.
⋄
1.1.
Ejemplo: Motor DC
Máquinas de corriente contı́nua son bastante usadas en sistemas de control en lazo cerrado, en particular
para el control de velocidad y torque. Existen de diversos tamaños comenzando a partir de unos cuantos watts,
accionados por amplificadores electrónicos, a varios cientos de kilowatss, accionados por generadores WardLeonard. Servomotores de bajo consumo de potencia se usan a menudo en instrumentación, particularmente
en sistemas de control de aviones, donde limitaciones de peso y espacio requieren de motores que provean el
máximo de potencia por unidad de volumen. Estos son usados para ciclos de trabajo intermitentes o donde
se requieran grandes torques en el arranque.
Un conductor que transporta corriente cuando inmerso en un campo magnético experimenta una fuerza
proporcional a la magnitud del fujo, la corriente y la longitud del conductor, y el ángulo entre el conductor
y la dirección del flujo. Cuando el conductor se localiza a una distancia fija de un eje, con respecto al cual
puede rotar, se genera un torque proporcional al producto de la fuerza y el radio. En un motor, el torque
resultante es la suma de torques producidos por conductores individualmente. Para un rotor dado las únicas
dos cantidades que se pueden manipular son la corriente de armadura y el flujo. Luego, existen dos modos
de operación de un servomotor DC: a)modo por armadura controlada y b) modo por campo controlado.
1.1.1.
Control de armadura
En el motor DC de armadura controlada el campo es excitado de forma separada por una corriente
constante if a apartir de una fuente DC fija. El flujo puede ser escrito como φ = Kf if , Kf constante. El
torque desarrollado por el motor es proporcional al producto de φ y la corriente en la armadura y la longitud
de los conductores. Dado que el campo es asumido constante, el torque desarrollado por el motor se puede
expresar como:
τm = Ki ia .
El torque del motor es usado para accionar el sistema que posee una inercia total Ieq . Asumiendo el caso
ideal donde el torque entregado es igual a la carga (en la práctica no hay 100 % de eficiencia). Entonces:
Ieq θ̈ = Ki ia .
Clase05-02, pág. 2
(2)
CONTROL POR REALIMENTACIÓN DE ESTADOS/CONTROLABILIDAD
Ra
La (negligible)
⫹
ea
⫺
Ieq
if ⫽ constant
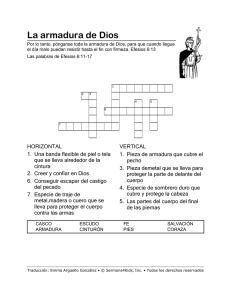
Figura 1: Modelo de un motor DC de armadura.
donde θ es la position angular del eje del motor.
A medida que la armadura rota en un campo, ésta desarrolla un voltaje inducido eb en dirección opuesta al
suministro de armadura. Este voltaje se llama fuerza contra-electromotriz y es proporcional a la velocidad de
˙ y el flujo creado por el campo. Dado que el campo es constante, la fuerza contra-electromotriz
rotación theta
puede ser expresada como:
(3)
eb = Kb θ̇.
donde Kb es la constante de voltaje del motor.
El control de la velocidad del motor se obtiene ajustando el voltaje aplicado a la armadura. Su polaridad
determina la dirección de rotación del motor. El diagrama esquemático del sistema motor DC de armadura
se presenta en la Fig. 1, donde Ra = 1Ω, La ∼ 0H, Kb = 5V/rad/sec, Ki = 5Nm/A, y el momento de inercia
efectivo es Ieq = 0,1kgm2 . La fricción y la inercia del engranaje son despreciables.
Aplicando la ley del voltaje de Kirchoff al circuito de la armadura resulta:
Ra ia + Kb θ̇ = ea .
(4)
Sustituyendo ia de (1) en la ecuación arriba mostrada y dividiendo ambos lados por Ieq resulta:
!
Ki ea − Kb θ̇
θ̈ =
Ieq
Ra
Ki
Ki Kb
θ̇ +
ea .
=
Ieq Ra
Ieq Ra
Sea x1 = θ, x2 = θ̇ y u = ea . Luego tomando en cuenta los parámetros del sistema, representamos la
ecuación arriba mostrada en la forma de espacio de estados.
ẋ1
0
1
x1
0
=
+
u.
ẋ2
x2
0 −250
50
Primero formamos la matriz de controlabilidad del sistema:
0
50
,
Wc = B AB =
50 −12500
y verificamos que el sistema es controlable.
Ahora encontraremos un control u que transfiere el sistema desde un estado inicial x(to ) = 10
T
al estado final x(2) = 0 0
. Recuerde que la solución del sistema controlado tiene la forma:
Z t
eA(t−τ ) Bu(τ )dτ.
x(t) = eA(t−to ) x(to ) +
to
Nuestro objetivo es encontrar u tal que:
0 = x(2) = e2A x(0) +
Z
2
eA(2−τ ) Bu(τ )dτ.
0
Clase05-02, pág. 3
1
T
CONTROL POR REALIMENTACIÓN DE ESTADOS/CONTROLABILIDAD
Se puede verificar que u tiene la forma:
T A(2−t)
u(t) = −B e
Z
2
A(2−τ )
e
T AT (2−τ )
BB e
dτ
0
donde:
At
−1
e
Entonces:
Z 2
Z
0
0
2
A(2−τ )
e
T AT (2−τ )
BB e
1
250 (1
1
0
=L
dτ
− e−250(2−τ ) )
e−250(2−τ )
−1
{(sI − A)
−1
La inversa de la matriz arriba es:
=
Entonces:
u(t) = −
0 50
}=
1
250 (1
1
0
−1
e2A x(0),
− e−250t )
e−250t
.
=
1
0
0 50
1
−250(2−τ )
−250(2−τ )
) e
250 (1 − e
0,07976 0,02
=
0,02
5
0
50
12,5502
−0,0502
1
1
−250(2−τ )
(1
−
e
)
250
−0,0502
0,2002
0
e−250(2−τ )
dτ
.
12,5502
−0,0502
−0,0502
0,2002
e2A
10
1
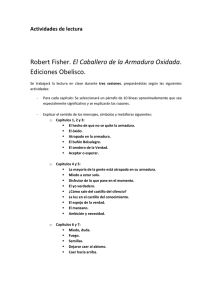
u(t) = 50,22e250t−500 − 25,11.
La estrategia de control arriba mostrada transfiere el sistema de x(0) =
10
1
T
a x(2) =
0 0
T
.
Gráficas de x1 y x2 versus tiempo son mostradas en la Fig. 2. Una gráfica de u versus tiempo está dada
en la Fig. 3.
12
x1
x2
10
8
6
4
2
0
⫺2
⫺4
⫺6
0
0.5
1
Time (sec)
1.5
2
Figura 2: Variables de estado versus tiempo.
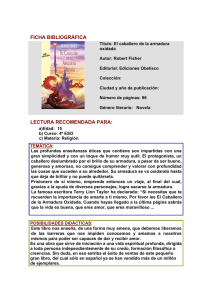
1.1.2.
Control de campo
La Fig. 4 muestra el diagram esquemático del motor DC de campo controlado donde la corriente de la
armadura es mantenida constante y el campo es suministrado a partir de un voltaje ajustable ef .
El torque τ desarrollado por el motor es proporcional al flujo creado por la corriente de armadura, la
corriente del campo y la longitud de los conductores. Para un motor dado, y dado que la corriente de
armadura es constante, el torque puede ser expresado como:
τ = KT if ,
Clase05-02, pág. 4
(5)
CONTROL POR REALIMENTACIÓN DE ESTADOS/CONTROLABILIDAD
30
20
10
u
0
⫺10
⫺20
⫺30
0
0.5
1
Time (sec)
1.5
2
Figura 3: Acción de control versus tiempo.
donde KT es la constante de torque. Este torque es usado para mover yba carda de inercia total J y para
vencer la fricción viscosa. Eso puede ser expresado, despreciando la constante de rigidez K, como:
τ = J θ̈m + B θ̇m .
(6)
Aplicando la ley de volatje de Kirchoff en el circuito del campo se obtiene:
ef = Rf if + Lf i̇f .
(7)
La representación espacio de estados se obtiene considerando a la posición angular y sus derivada como los
primeros estados, x1 = θm , x2 = θ̇m , la corriente de campo como el tercer estado, x3 = if , y al voltaje del
campo como la entrada u = ef donde la posición angular se considera como la salida y = θm = x1 . Luego
las matrices correspondientes son:
0
1
0
0
KT /J , b = 0 , c = 1 0 0 ,
A = 0 −B/J
0
0
−Rf /Lf
1/Lf
donde KT =
540
1.2.
INTRODUCTION TO CONTROL ENGINEERING
Sistema no controlable
Teorema 2 El sistema ẋ = Ax+Bu es no controlable si y sólo si existe una transformación de similaridad
z = T x tal que:
A1 A2
B1
−1
à = T AT =
, , B̃ = T B =
0 A4
0
donde el sistema ẋr = A1 xr + B1 u es controlable, A1 ∈ Rr×r , B1 ∈ Rr×m , y el rango de la matriz de
controlabilidad del sistema ẋ = Ax + Bu es igual a r.
Ia = Const.
Rf
+
ef
if
m
Lf
J
Fig. A.19 Field controlled DC motor
B
Figura 4: Motor DC de campo controlado.
Clase05-02, pág. 5
CONTROL POR REALIMENTACIÓN DE ESTADOS/CONTROLABILIDAD
1.2.1.
Ejemplo de sistema no controlable
Para el modelo del sistema:
−1
1
ẋ =
0
1
1
1
0
1
0
0
4
−1
1
0
x +
0
2
1
0
0
0
1
0
u,
0
1
construir la transformación de las variables de estado tal que en el nuevo sistema coordenado la parte
controlable sea separada de la parte no controlable.
Primero formamos la matriz de controlabilidad del sistema:
1 1 −1
0
0 1
Wc = B AB A2 B A3 B =
0 0 0
0 1 1
Usando el comando del MATLAB
−1 0
0
0
0
−1
Q=
0
0
0
0 −1 0
[Q,R]=qr(W_c) para obtener:
−1 −1 1
0
0 −1 −1
0
, R =
0
0 −1
1
0
0
0
0
0
1
0
3
3
0
0
2
0 −3
−3 −2
−1 0
0
0
4 −1
1 3
0 0
7 7
4
5
.
0
19
−4 1
−7 −7
−1 −3
0
0
−4
−19
.
−5
0
donde las matrices Q y R satisfacen Wc = QR, donde Q es una matriz ortogonal y R es una matriz triangular
superior tal que el rango R=rango Wc . Entonces, premultiplicando la matriz de controlabilidad, Wc , por
Q−1 reduce esta matriz a una matriz de filas triangular superior R porque Q−1 Wc = R. Sea z = Q−1 x
la transformación de las variables de estado. Entonces en el nuevo sistema coordenado las matrices A y B
toman la forma:
−1 1 1 0
−1 −1
1 2 1 1
0 −1
−1
.
Q−1 AQ =
1 0 1 0 , and Q B = 0
0
0 0 0 4
0
0
La dimensión de la parte no controlable es 1.
1.3.
Estabilizabilidad
Si los autovalores de la parte no controlada de un sistema ẋ = Ax + Bu están todo en el semiplano
complejo izquierdo abierto- esto es, que la parte no controlada es asintóticamente estable- luego el sistema
ẋ = Ax + Bu es estabilizable.
Fuente: Capı́tulo 3 del libro Systems and Control de Stanislaw H. Zak (2002).
Fuente: Capı́tulo 6 del libro Feedback Systems: An Introduction for Scientists and Engineers, de Karl J.
Åström y Richard M. Murray.
Fuente: Capı́tulo 6 del libro Linear System Theory and Design, de C.T.Chen.
Clase05-02, pág. 6