Modelo de un motor DC
Anuncio

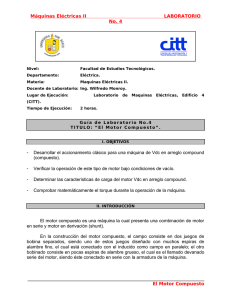
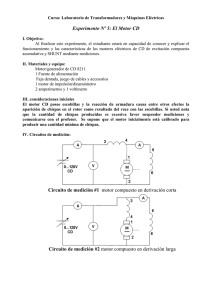
UNIVERSIDAD NACIONAL DE INGENIERÍA - FIM- MT 221C/D Ingenierı́a de Control TEMA: MOTOR DC Máquinas de corriente contı́nua son bastante usadas en sistemas de control en lazo cerrado, en particular para el control de velocidad y torque. Existen máquinas de diversos tamaños, comenzando a partir de unos cuantos Watts –accionados por amplificadores electrónicos, a varios cientos de kilowatss –accionados por generadores Ward-Leonard. Servomotores de bajo consumo de potencia se usan a menudo en instrumentación, particularmente en sistemas de control de aviones, donde limitaciones de peso y espacio requieren de motores que provean el máximo de potencia por unidad de volumen. Un cuerpo conductor que transporta corriente, cuando inmerso en un campo magnético, experimenta una fuerza proporcional a la magnitud del flujo, la corriente, la longitud del conductor y el ángulo entre el conductor y la dirección del flujo. Cuando el conductor se localiza a una distancia fija de un eje, con respecto al cual puede rotar, se genera un torque proporcional al producto de la fuerza y el radio. En un motor, el torque resultante es la suma de torques producidos por conductores individualmente. Para un rotor dado las únicas dos cantidades que se pueden manipular son la corriente de armadura y el flujo. Luego, existen dos modos de operación de un motor DC: a)modo por armadura controlada y b) modo por campo controlado. Control por armadura En el motor DC de armadura controlada el campo es excitado de forma separada por una corriente constante if a partir de una fuente DC fija. El flujo puede ser escrito como φ = Kf if , Kf constante. El torque desarrollado por el motor es proporcional al producto de φ y la corriente en la armadura y la longitud de los conductores. Dado que el campo es asumido constante, el torque desarrollado por el motor se puede expresar como: τm = Ki ia . Ra La (negligible) ⫹ ea ⫺ Ieq if ⫽ constant Figura 1: Modelo de un motor DC de armadura. El torque del motor es usado para accionar el sistema que posee una inercia total Ieq . Asumiendo el caso ideal donde el torque entregado es igual a la carga (en la práctica no hay 100 % de eficiencia). Entonces: Ieq θ̈ = Ki ia . (1) donde θ es la position angular del eje del motor. A medida que la armadura rota en un campo, ésta desarrolla un voltaje inducido eb en dirección opuesta al suministro de armadura. Este voltaje se llama fuerza contra-electromotriz y es proporcional a la velocidad de rotación θ̇ y el flujo creado por el campo. Dado que el campo es constante, la fuerza contra-electromotriz puede ser expresada como: eb = Kb θ̇. (2) donde Kb es la constante de voltaje del motor. El control de la velocidad del motor se obtiene ajustando el voltaje aplicado a la armadura. Su polaridad determina la dirección de rotación del motor. El diagrama esquemático del sistema motor DC de armadura se presenta en la Fig. 1, donde Ra = 1Ω, La ∼ 0H, Kb = 5V/rad/sec, Ki = 5Nm/A, y el momento de inercia efectivo es Ieq = 0,1kgm2 . La fricción y la inercia del engranaje son despreciables. Aplicando la ley del voltaje de Kirchoff al circuito de la armadura resulta: Ra ia + Kb θ̇ = ea . (3) Sustituyendo ia de (1) en la ecuación arriba mostrada y dividiendo ambos lados por Ieq resulta: ! Ki ea − Kb θ̇ θ̈ = Ieq Ra Ki Kb Ki = θ̇ + ea . 540 INTRODUCTION TO CONTROL ENGINEERING Ieq Ra Ieq Ra Sea x1 = θ, x2 = θ̇ y u = ea . Luego tomando en cuenta los parámetros del sistema, representamos la ecuación arriba mostrada en la forma de espacio de estados. 0 x1 0 1 ẋ1 u. + = 50 x2 0 −250 ẋ2 Control por campo La Fig. 2 muestra el diagrama esquemático del motor DC de campo controlado donde la corriente de la armadura es mantenida constante y el campo es suministrado a partir de un voltaje ajustable ef . Ia = Const. Rf + ef if m Lf J B Fig. A.19 Field controlled DC motor Figura 2: Motor DC de campo controlado. El torque τ desarrollado por el motor es proporcional al flujo creado por la corriente de armadura, la corriente del campo y la longitud de los conductores. Para un motor dado, con corriente de armadura constante, el torque puede ser expresado como: τ = KT if , (4) donde KT es la constante de torque. Este torque es usado para mover la carga de inercia total J y para vencer la fricción viscosa. Eso puede ser expresado, despreciando la rigidez torsional del eje, como: τ = J θ̈m + B θ̇m . (5) Aplicando la ley de voltaje de Kirchoff en el circuito del campo se obtiene: ef = Rf if + Lf i̇f . (6) La representación espacio de estados se obtiene considerando a la posición angular y su derivada como los primeros estados, x1 = θm , x2 = θ̇m , la corriente de campo como el tercer estado, x3 = if , y al voltaje del campo como la entrada u = ef donde la posición angular se considera como la salida y = θm = x1 . Luego las matrices correspondientes son: ẋ1 0 1 0 x1 0 x ẋ2 = 0 −B/J KT /J x2 + 0 u 1 x2 . ẋ3 0 −Rf /Lf x3 1/Lf 0 x3 y = 1 0 0