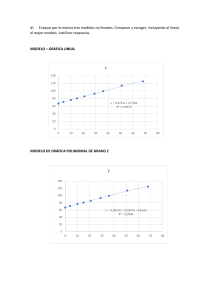
Transparencias del tema 5
Anuncio

Sistemas Automáticos- Tema 5 ` Seguimiento de referencias ` Errores en régimen permanente ` Comportamiento dinámico 2 Sensibilidad complementaria Sensibilidad ` ` ` ` Para analizar el seguimiento de referencias podemos utilizar tanto T como S . T nos informa del valor de la salida Y dada una f i R. referencia S nos da la diferencia entre la referencia R y la salida Y, es decir el error, E = R – Y . Se cumple que T + S = 1 3 4 y e 5 6 ` Se dice que un sistema es de tipo n (para seguimiento de referencias) cuando tiene error constante y no nulo en régimen permanente ante referencias de tipo polinomial de grado n. ` Las referencias de tipo polinomial de grado n son de la forma: ` Ejemplos de señales de referencia de tipo polinomial: ◦ E Escalón ló d de valor l A A: ◦ Rampa de pendiente P: ◦ Parábola no unitaria: 7 ep Tipo 0 Tipo 1 ev 8 9 Tipo 0 −9.54 dB Tipo 1 −26 dB +20 dB/déc −9.54 dB ≡ 0.333 −26 dB ≡ 0.0502 .0502/.1 = .502 10 Tipo 0 Tipo 1 Tipo 2 11 R(s) + − U(s) D W(s) Z(s) + + G Y(s) H + V(s) 12 W(s) R(s) + − U(s) D + 100 s (s + 100) Y(s) + V(s) D = 10 D = 30 D = 100 13 D = 100 D = 30 D = 10 14