Realimentación (I)
Anuncio
")
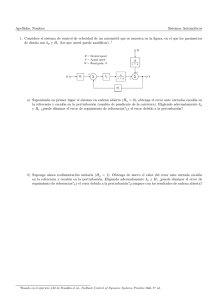
Apellidos, Nombre: W Compensator R ⫹ ⌺ ⫺ s⫹4 160 s ⫹ 30 ⫹ ⫹ ⌺ Plant 1 s(s ⫹ 2) Y Sensor H(s) En la figura se muestra un sistema de control de posición de un motor. 1 Asuma que la dinámica del sensor es H(s) = 1. 1. ¿Puede el sistema seguir un escalón en la entrada de referencia R con un error en régimen permanente nulo? Si es ası́, indique el valor de la constante de velocidad. 2. ¿Puede el sistema rechazar un escalón en la perturbación W con un error en régimen permanente nulo? Si es ası́, indique el valor de la constante de velocidad. 3. Sustituya el compensador por uno proporcional (D(s) = 160) y calcule la sensibilidad de la función de transferencia en cadena cerrada ante cambios en el polo de la planta en -2. Empleando el resultado anterior, indique el efecto en la ganancia estática del sistema realimentado de una modificación en la posición del polo de -2 a -1.8. 1 Basado en el ejercicio 4.18 de Franklin et al., Feedback Control of Dynamic Systems, Prentice Hall, 5a ed. 4. En algunos casos hay dinámica en el sensor. Repita el primer apartado para H(s) = de velocidad. 20 s+20 y compare las constantes 5. Repita el primer apartado para el caso de cadena abierta (H(s) = 0) y compare las constantes de velocidad.