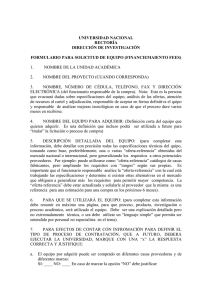
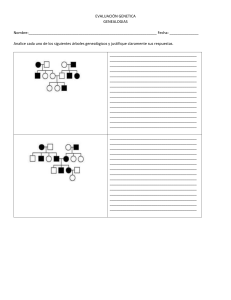
ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático SISTEMAS DE CONTROL AUTOMÁTICO – DEBER N°3 Análisis en el tiempo, Respuesta de Frecuencia, LGR Fecha de entrega: 17/07/2019 1. Relaciones las funciones de trasferencia con las respuestas al escalón dadas a continuación 𝐺1 (𝑠) = 𝐺4 (𝑠) = 𝐺7 (𝑠) = 𝑠2 𝑠2 𝑠 +𝑠+1 1 𝑠 + 10 1 + 0.5𝑠 + 1 𝐺2 (𝑠) = 1 𝑠+1 𝐺5 (𝑠) = 10 𝑠 + 10 𝐺8 (𝑠) = −𝑠 + 1 𝑠+1 𝐺3 (𝑠) = 𝑠2 𝐺6 (𝑠) = 1 + 2𝑠 + 1 −𝑠 + 1 +𝑠+1 𝑠2 𝐺9 (𝑠) = 𝑠2 3𝑠 + 1 + 2𝑠 + 1 ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático 2. En la figura 1 se muestra en diagrama de bloque de un sistema de control lineal, en donde 𝒓(𝒕) es la referencia de entrada y 𝒏(𝒕) es la perturbación a. Encuentre el valor en estado estable de 𝑒(𝑡) cuando 𝑛(𝑡) = 0 y 𝑟(𝑡) = 𝑡𝑢𝑠 (𝑡). b. Encuentre el valor en estado estable de 𝑦(𝑡) cuando 𝑟(𝑡) = 0 y 𝑛(𝑡) = 𝑢𝑠 (𝑡). Figura 1 3. Conteste las siguientes preguntas y justifique sus repuestas. a. Si un sistema de control con realimentación unitaria es del tipo 2, es verdad que el error en estado estable del sistema a una entrada escalón o rampa será cero? (V) (F) Justifique su respuesta b. Para un sistema de segundo orden, cuando la frecuencia natural no amortiguada wn se incrementa, el Máximo Sobreimpulso (Mp), permanece igual? (V) (F) Justifique su respuesta c. El incrementar la frecuencia natural no amortiguada wn, generalmente reducirá el tiempo de levantamiento de la respuesta al escalón? (V) (F) Justifique su respuesta d. El adicionar un cero a la función de trasferencia de la trayectoria directa generalmente mejorará el amortiguamiento del sistema, y por lo tanto siempre reducirá el Máximo Sobreimpulso (Mp) del sistema (V) (F) Justifique su respuesta e. Si un polo se mueve con una parte real constante, se mantiene constante el valor del tiempo de establecimiento? (V) (F) Justifique su respuesta ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático f. Si un polo se mueve a lo largo de una línea radial que se prolonga desde el origen del plano s, se mantiene constante el valor del tiempo pico y el Máximo Sobreimpulso (Mp) del sistema? (V) (F) Justifique su respuesta g. Al incrementar la ganancia de la función de transferencia de la trayectoria directa, el error en estado estable se incrementa? (V) (F) Justifique su respuesta 4. En función del gráfica de la magnitud del diagrama de bode que se observa en la figura: a. Determinar el tipo del sistema para los tres casos b. Los errores en estado 5. Para el sistema de la Figura 1 Figura 1. Sistema Realimentado Donde: ESCUELA POLITÉCNICA NACIONAL Sistemas de Control Automático 𝑮(𝒔) = 𝑲 (𝒔 + 𝟑)(𝒔 + 𝟒)(𝒔 + 𝟓) a. Bosquejar el diagrama de Bode (magnitud y fase) b. A partir del diagrama de Bode determinar el rango de K para que el sistema sea estable. c. Comprobar el rango de k usando el criterio de Ruth Hurwitz d. Determinar analíticamente y mediante el diagrama de Bode el Margen de Ganancia y de Fase para el sistema si K=200. 𝟏𝟔 6. Dibujar el diagrama de bode (magnitud) de lazo cerrado del sistema 𝑮(𝒔) = 𝒔(𝒔+𝟏.𝟔), con realimentación unitario, determinar, Mr, wr, AB, gráfica y analíticamente. 7. Determine: a. Los valores del parámetro α que aseguran la estabilidad del siguiente sistema de control. b. Obtenga el valor de la salida en régimen permanente cuando en la entrada que se aplica es un escalón unitario. 8. Para el sistema de la Figura 2 Figura 2. Sistema Realimentado Donde: 𝑮(𝒔) = (𝒔 + 𝟐) 𝑠(𝑠 − 2) a. Dibujar el LGR del sistema b. En base al LGR dibujado en el literal a responder las siguientes preguntas i. Existe un valor de K tal que el sistema es oscilatorio? ii. Para que rango de ganancia K, el sistema tiene un comportamiento subamortiguado iii. Cuál es el valor de K y donde se encuentras los polos de lazo cerrado cuando el sistema es críticamente amortiguado.