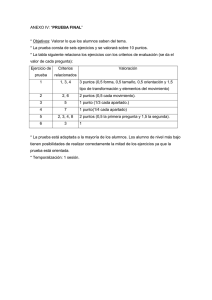
MATRIZ HOMOGÉNEA Las matrices de rotación únicamente permiten representar cambios de orientación entre dos sistemas de coordenadas diferentes. En robótica de manipuladores es evidente la necesidad de representar cambios traslacionales, además de los rotacionales. Para ello se definen las matrices de transformación homogénea. Una matriz de transformación homogénea es un operador que soporta ambas transformaciones de manera integrada, además de escalado y perspectiva. Son matrices de 4x4 que transforman un vector expresado en 28 coordenadas homogéneas desde un sistema de coordenadas hasta otro sistema de coordenadas. Consisten de 4 submatrices. } La submatriz superior derecha tiene el efecto de trasladar el sistema de coordenadas OUVW que tiene ejes paralelos al sistema de referencia OXYZ, pero cuyo origen está en el punto Posición3x1. La submatriz superior izquierda corresponde al operador de rotación que relaciona la orientación entre dos sistemas de coordenadas. La submatriz inferior izquierda se emplea para variaciones en la perspectiva visual de los elementos y la submatriz inferior derecha corresponde a un parámetro de escalado (ambos empleados en aplicaciones de simulación y modelado). Una extensa parte del estudio de la cinemática trata de establecer la relación que existe entre un sistema de coordenadas y otro marco de referencia. La relación que existe entre ambos sistemas se llama transformación homogénea, la cual involucra a la geometría en tres dimensiones, por lo tanto, este esquema permite analizar las operaciones de rotación de un sistema de coordenadas a otro, así como las operaciones de translación en la que se conocen las coordenadas de un vector que se desplaza en algunos de los tres ejes del marco de referencia. ROTACIÓN Si se tiene un marco de referencia fijo X0,YQ,Z0 y otro XX,YX,ZX, que está rotado un ángulo 6 con respecto al primero como se muestra en la siguiente figura. Fig.: -Rotación de un sistema de coordenadas alrededor de eje Z0 La rotación del marco XX, YX, ZX, está hecho tomando como base el eje Z0, por lo tanto, cualquier vector representando en el eje Zx, tendrá el mismo componente en el eje Z0; esto no sucede para los ejes X1 y Y1, para poder representar un vector que se encuentra en el marco X1, Y1, Z1, en el marco X0, Y0, Z0. Es necesario hacer una transformación de coordenadas, y el procedimiento es el siguiente: Se busca la proyección del vector unitario i1, (del eje X1), en i0 (del eje X0), el valor de esta proyección es cosθ. Posteriormente se busca la proyección de j1, en el mismo i0 y k1, con el mismo procedimiento entonces se tiene que la proyección de j1, en i0 es igual a -senθ y la proyección k1 i0 es 0. Con estos resultados se obtiene los tres primeros elementos de la matriz de transformación la cual tiene la siguiente estructura: Como se dijo: El paso siguiente es encontrar las proyecciones restantes, las cuales son: Finalmente, la matriz de transformación resulta: Como conclusión de lo anterior, se puede decir de la matriz R lo siguiente: • Es útil para conocer la orientación de un vector, que está vinculado a un marco de referencia en otro marco de referencia. • El marco de referencia dos está rotado 9 radianes con respecto al marco de referencia uno, tomando como pivote el eje Z. • El marco de referencia uno es denominado marco fijo y el dos es variable con respecto al primero. Cada eslabón de un robot manipulador se considera idealmente rígido, con una longitud conocida, de esta forma el motor o los motores que mueven a cada eslabón harán que el robot manipulador tenga una dirección y sentido, por lo tanto, cada una de las articulaciones puede ser representada en forma vectorial. La transformación de rotación Rl0 es la matriz de transformación asociada a cada eslabón en otro marco de referencia rotado 0 radiantes, es decir, es la representación del eslabón uno (sistema de referencia uno), respecto al sistema (base) del eslabón cero. La situación anterior resuelve parcialmente el problema de representar un vector (la posición y orientación de un eslabón) en un marco de referencia rotado un ángulo 6xm eje con respecto al otro, sin embargo, la cinemática en un robot manipulador, por ser en un espacio de tres dimensiones, las rotaciones puedan presentarse para cualquiera de los tres ejes, por lo tanto, al aplicar el mismo análisis presentado en el primer caso, se tienen permite obtener los siguientes resultados: Para el caso de la rotación respecto al eje XO : Y para la rotación respecto al eje Y0 Estas tres transformaciones permiten describir un vector en un marco (uno) que rota un ángulo θ, α, β alrededor de los ejes X0, Y0, Z0 respectivamente, es decir, sólo se tienen que multiplicar las matrices RZ, θ, Rx, α, Ry, β en el orden adecuado, puesto que en la multiplicación de matrices no existe la propiedad de conmutación. Como puede apreciarse, el análisis anterior solo define la matriz rotación en los tres ejes, y debido a que algunos robots manipuladores poseen articulaciones (prismáticas) que se mueven linealmente, por lo tanto, se tiene que definir ahora la matriz (transformación) de translación, la cual permitirá describir un vector asociado a un marco que se traslada una distancia lineal con respecto a otro sistema de referencia. Así, tomando un marco X0, Y0, Z0 fijo con respecto a otro X1,Y1,Z1 que se mueve como se observa en la siguiente figura, se requiere representar un vector asociado al marco móvil respecto al marco fijo, es decir, se desea conocer la orientación y dirección de un vector asociado al sistema X1,Y1,Z1 que se mueve linealmente con respecto a los ejes del sistema X0,Y0,Z0. Un sistema de referencia desplazado linealmente con respecto a otro. Entonces, cualquier punto P tiene una representación tanto en X0, Y0, Z0 como en X1, Y1, Z1. Puesto que los ejes coordenados respectivos de los dos sistemas son paralelos, los vectores del sistema X0, Y0, Z0 y los del sistema X1, Y1, Z1 están relacionados por: Como se puede observar, a cada uno de los ejes (del sistema móvil) se le suma la distancia que existe entre el marco móvil y fijo con respecto a cada eje (del sistema fijo), es decir, se suma una distancia a para el eje X, una distancia b para Y, y una distancia c para el eje Z Una relación más general entre los sistemas de coordenadas X0, Y0, Z0 y X1, Y1, Z1 puede ser expresada como una combinación de una rotación pura y una traslación pura, es decir; Por lo tanto, la transformación homogénea puede ser expresada como: De esta forma, se tiene que, para el primer caso, que representa un movimiento de traslación respecto al eje X, se tiene una matriz de traslación en representación homogénea es: Siguiendo con el mismo análisis, las matrices de traslación para el eje Y y Z resultan: La representación homogénea de las matrices de rotación, está dada por: Mediante la integración de las matrices de rotación y de traslación, es posible obtener la representación de un vector en un marco que se rota un ángulo θ alrededor de Z, un ángulo α alrededor de X, un ángulo β alrededor de Y, se desplaza una distancia a con respecto al eje X, una distancia b con respecto al eje Y, o una distancia c con respecto al eje z, todo esto transforma a las coordenadas de un marco fijo. UNIVERSIDAD MAYOR DE SAN SIMON U.M.S.S. FACULTAD DE CIENCIAS Y TECNOLOGIA FCYT MATRIZ HOMOGENEA ESTUDIANTE: CÁCERES AGUILAR LUIS FERNANDO CARRERA: INGENIERIA ELECTROMECANICA DOCENTE: MARCO ANTONIO ARANCIBIA MIRANDA MATERIA: ROBOTICA GESTION: I/2018 Cochabamba - Bolivia