MA0350 C´ALCULO EN UNA VARIABLE II Escuela de
Anuncio

MA0350 CÁLCULO EN UNA VARIABLE II
WILLIAM J. UGALDE, I - 2011
Escuela de Matemática, Universidad de Costa Rica.
1. Introducción
Este material fue diseñado para el segundo curso de una secuencia de tres
cursos de cálculo. Dos de cálculo en una variable real y uno de cálculo en
varias variables reales. A lo largo de esta secuencia de cursos se cubren los
temas usuales del cálculo, presentando el material en una forma rigurosa.
Además se ven algunas aplicaciones dando énfasis al planteamiento y resolución de problemas.
Al invitar al lector a leer estas notas, la primera observación es que no es
necesario leerlas en forma lineal. Siempre que el lector tenga familiaridad
con algunos conceptos, puede sentirse en completa libertad de leer secciones
seleccionadas.
Siempre con la intensión de desarrollar el buen uso del lenguaje lógico
matemático, el objetivo de estas notas en cubrir el material eferente al
cálculo integral en una variable. En particular, se cubren los conceptos
de integración de Riemann incluidas en forma breve las diferentes técnicas
de integración. El concepto de integración impropia. Sucesiones y series de
funciones, series numéricas y series de potencias.
Diferentes grupos de estudiantes han presentado diferentes retos y necesidades. Como resultado, la lista de contenidos que se presenta adelante
contiene algunos temas que vienen a llenar esas necesidades, o bien temas
que buscan explorar áreas de interés en diferentes momentos.
Algunos requisitos: Dado que este es el segundo curso de una secuencia
de cursos de cálculo, es natural tener una serie de requisitos, en particular el
material cubierto en el curso anterior. En esta sección listamos la mayorı́a
de esos requisitos, dejando de lado sus demostraciones formales.
Primero que todo, haremos uso del axioma del extremo superior, y por
ende, de las nociones de cota superior e inferior, y de máximos y mı́nimos.
Además de las nociones básicas sobre intervalos, tanto abiertos como cerrados, en R. El principio del primer elemento y la arquimedianidad de los
números naturales.
El principio de inducción es una herramienta que no puede faltar en nuestro haber.
1
2
1 Introducción
La naturaleza del presente curso, nos obliga a asumir un sólido conocimiento previo del tema de sucesiones numéricas reales. En particular los resultados principales sobre convergencia y la caracterización de Cauchy para
sucesiones convergentes. Las nociones de sucesión acotada y de subsucesión
convergente.
Sobre funciones requerimos entre otras las nociones de monotonicidad
y acotación, y los conceptos de lı́mite tanto puntuales como al infinito.
Además, una de las nociones centrales a tratar en este libro es la de continuidad. Una función f : A ⊂ R → R es continua alrededor de un punto a
en su dominio A si para todo > 0 existe δ > 0 (el cual puede depender de
a) tal que si |x − a| < δ para algún x en A se tiene que |f (x) − f (a)| < ε.
La función se dice ser continua en todo A si es continua en cada punto de
dicho dominio.
Muchos son los resultados centrales de la teorı́a de funciones continuas. El
más conocido es el que establece que toda función continua alcanza ambos
su máximo y su mı́nimo absoluto en todo intervalo cerrado y acotado. Más
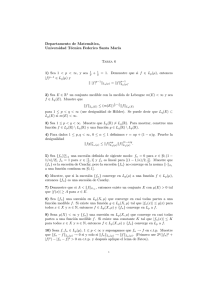
útil aún es el teorema de valores intermedios, según el cual, si f es continua
y f (x1 ) < y < f (x2 ) para algún valor y entonces, existe un x entre x1 y x2
tal que f (x) = y (véase la siguiente figura a la izquierda).
Evidentemente, usaremos que la composición de funciones continuas es
continua. Quizás el resultado referente a continuidad que más usaremos en
este libro, es el que establece que si una función es continua en un intervalo
cerrado y acotado, entonces la función es uniformemente continua en dicho
intervalo, i.e., para todo > 0 existe δ > 0 tal que si |x − y| < δ para x
y en A se tiene que |f (x) − f (y)| < ε. Aquı́ el valor de δ es independiente
de y (y de x). En forma intuitiva, este resultado crea una cuadrı́cula finita
en la que cada subdivisión es un rectángulo cuyo largo no excede δ y cuya
altura no excede ε, de modo tal que en cualquier punto dado, el cambio de
la función está contenido en dicho cuadriculado (véase la siguiente figura a
la derecha).
f (x2 )
ε
y
f
f (x1 )
x1
x
x2
δ
El siguiente gran tópico del cálculo en una variable es la diferenciación.
Como un segundo curso de cálculo, en el presente los resultados centrales de
la teorı́a de derivación serán pan de cada dı́a. Aparte de la noción de derivabilidad, usaremos el hecho que toda función derivable es continua. Además
las relaciones entre el signo de la derivada y la monotonicidad de la función,
y la teorı́a de los extremos relativos.
1 Introducción
3
Entre los resultados fundamentales destacamos la regla de la cadena, y el teorema del valor medio,
según el cual, si f es continua en
[a, b] y derivable en ]a, b[, existe un
c entre a y b para el cual
f 0 (c)(b − a) = f (b) − f (a).
a
c
b
Al estudiar la existencia de antiderivadas, es decir, si dada una función f
existe una función g de modo tal que g 0 = f , no será de utilidad el teorema de
Darboux. También conocido como el Teorema de Valores Intermedios para
Derivadas dicho resultado establece que si f es una función diferenciable en
[a, b] con f 0 (a) 6= f 0 (b), y si y es un número real entre f 0 (a) y f 0 (b) entonces,
existe un x ∈]a, b[ tal que f 0 (x) = y.
Por último, el teorema de Taylor será de gran inspiración en la sección
sobre series de potencias.
Las listas de ejercicios en cada sección son extensas, y es central para
la formación del estudiante, que intente resolver todos y cada uno de los
ejercicios propuestos.
4
1 Introducción
Contenidos
1. Introducción
2. Sucesiones y convergencia
2.1. Sucesiones
2.2. Lı́mites superior e inferior
2.3. Topologı́a muy básica
3. Continuidad uniforme
3.1. Continuidad uniforme
4. La integral de Riemann
4.1. Motivación
4.2. Integral definida
4.3. Sumas de Darboux
4.4. El teorema fundamental del cálculo
5. Técnicas de integración
5.1. Integrales inmediatas a partir de derivadas
5.2. Integración por partes
5.3. Integración por sustitución
5.4. Fracciones parciales
5.5. Otras técnicas
6. Aplicaciones de la integral definida
6.1. Áreas encerradas por curvas
6.2. Longitud de curvas planas
6.3. Volumen de revolución
6.4. Área en coordenadas polares
6.5. Masa de un alambre
6.6. Otras aplicaciones
7. Integración numérica
7.1. Aproximaciones con sumas de Riemann
7.2. Aproximaciones de tipo geométrico
8. Integrales dependientes de un parámetro
9. Sucesiones de funciones
9.1. Convergencia puntual y uniforme
9.2. Continuidad de la función lı́mite
9.3. Derivabilidad de la función lı́mite
9.4. Integrabilidad de la función lı́mite
9.5. Aproximación de funciones continuas
10. Integrales impropias
10.1. Integrales impropias de primer especie
10.2. Integrales impropias de segunda especie
10.3. Integrales impropias con un parámetro
11. Series numéricas
11.1. Convergencia de series numéricas
11.2. Convergencia absoluta y condicional
11.3. Series de productos y series alternantes
1
6
6
16
21
27
27
32
32
33
44
53
61
61
62
63
65
66
71
71
72
74
75
75
76
83
83
86
90
96
96
101
101
103
105
114
114
123
130
142
142
146
149
1 Introducción
11.4. Criterios de la razón y de la raı́z
12. Series de funciones
12.1. Series de funciones
12.2. Series de potencias
12.3. Series de Taylor
13. Introducción a la teorı́a de Fourier
13.1. Series de Fourier
13.2. Convergencia en norma
13.3. Integrales de Fourier
14. Productos infinitos
15. Bibliografı́a recomendada
Índice Alfabético
5
150
158
158
161
164
177
177
183
192
197
204
205
6
2. Sucesiones y convergencia
En este capı́tulo estudiamos sucesiones y el concepto de convergencia
de las mismas. Vamos además a aprovechar dicho recurso para hacer una
pequeña introducción a la topologı́a de los números reales.
2.1. Sucesiones.
Definición 2.1. Una sucesión {xk }k∈N en R es el ámbito de una función
f : N → R, donde el único elemento que corresponde bajo esta relación al
punto k ∈ N es xk ∈ R, i.e. xk := f (k). A una tal sucesón la denotaremos
mediante
(xk )k = (x0 , x1 , . . . , xn , . . . ).
Ejemplos 2.2. (1) La sucesión númerica (1, −1, 1, −1, . . . ) corresponde a
la definición xn := (−1)n para n ∈ N.
(2) La sucesión xn := 1/(n + 1) para n ∈ N representa la colección ordenada
de números reales
1
1 1
,...
1, , , . . . ,
2 3
n+1
(3) El factorial definido como x0 = 0! = 1, x1 = 1! = 1 y
xn = n! = nxn−1 = n · (n − 1) · (n − 2) · · · 3 · 2 · 1,
es el ejemplo clásico de una sucesión definida por recurrencia.
De los ejemplos anteriores observamos que desde el punto inicial del estudio de las sucesiones, es necesario iniciar un proceso de clasificación de las
mismas.
Definición 2.3. Una sucesión (xk )k es acotada si y solo si existe M > 0
tal que |xk | ≤ M para todo k ∈ N .
En ambos Ejemplos 2.2.1 y 2.2.2, basta con tomar M = 1 para tener
|xk | ≤ M para todo k ∈ N. En el Ejemplo 2.2.3 en cambio, no existe M ∈ R
para el cual n! ≤ M para todo n ∈ N.
Definición 2.4. Una sucesión (xk )k es creciente si xn ≤ xm siempre que
n ≤ m en N y es decreciente si xn ≥ xm siempre que n ≤ m en N. En
ambos casos diremos que la sucesión es monótona. Es usual agregar la
palabra “estricta” para el caso xn < xm , o xn > xm , para todo n < m en
N, según corresponda.
En el Ejemplo 2.2 tenemos una sucesión (estrictamente) decreciente y en
el Ejemplo 2.2.3 tenemos una sucesión (estrictamente) creciente
La más importante de las propiedades referente a una sucesión es su
“convergencia”, es decir, si existe un número real al cual los valores de la
sucesión se acercan más y más conforme el ı́ndice crece.
2 Sucesiones y convergencia
2.1 Sucesiones
7
Definición 2.5. Una sucesión (xk )k es convergente si y solo si existe x ∈ R
para el cual, para todo ε > 0 existe un K(ε) = K ∈ N tal que |x − xk | < ε
para todo k ≥ K en N. En tal caso decimos que la sucesión (xk )k converge
a x, o bien que x es el lı́mite de la sucesión (xk )k , y escribimos
x = lim xk
k→∞
o bien
xk → x.
Ejemplos 2.6. (1) La sucesión númerica xn := (−1)n para n ∈ N del
Ejemplo 2.2 no es convergente. De hecho, si suponemos que existe x ∈
R para el cual, al tomar ε = 1/2 > 0, existe un K ∈ N de modo tal
que |x − xk | < 1/2 para todo k ≥ K entonces, tomando k impar y par
respectivamente concluimos que
1
3
− <x<−
2
2
lo cual es una contradicción.
y
−
1
3
<x< ,
2
2
(2) La sucesión xn := 1/(n+1) para n ∈ N converge a x = 0. De hecho, para
ε > 0 arbitrario existe por arquimedianidad K ∈ N tal que 1 < ε(K + 1).
De este modo
1
1
≤
< ε,
|0 − xk | =
k+1
K +1
para todo k ≥ K.
Nota. Vamos a encontrar sucesiones (xn )n que crecen indefinidamente. En
tal caso escribimos lim xn = ∞, donde por esto entendemos que para todo
N ∈ N existe un K ∈ N tal que xn ≥ N para todo n ≥ K.
♦
Lema 2.7. Toda sucesión convergente posee un único lı́mite.
La demostración se deja como Ejercicio 2.5 para el estudiante.
Lema 2.8. Toda sucesión convergente es acotada.
Prueba: Basta tomar ε = 1, y por la Definición 2.5 se tiene para K = K(1)
que
|xn | ≤ max{|x0 |, |x1 |, . . . , |xK−1 |, |x + 1|, |x − 1|},
si lim xn = x.
Nota. Haciendo uso de la contrapositiva se concluye que toda sucesión que
no es acotada, no es convergente. En particular xn = n! del Ejemplo 2.2 no
es convergente.
Observe además que existen sucesiones que son acotadas pero que no son
convergentes.
♦
Lema 2.9. Toda sucesión monótona y acotada es convergente.
8
2 Sucesiones y convergencia
2.1 Sucesiones
Prueba: Sin pérdida de generalidad supongamos que (xn )n es una sucesión
creciente y acotada. Como el conjunto {xn : n ∈ N} es no vacı́o y acotado
superiormente, posee un supremo. Sea x = sup{xn : n ∈ N}. Dado ε > 0,
por la caracterización de los supremos, existe xK ∈ {xn : n ∈ N} tal que
x − ε < xK ≤ xk ≤ x,
para todo k ≥ K, donde usamos en la segunda desigualdad el hecho que la
sucesión es creciente. En particular 0 ≤ x − xk < ε, y el resultado sigue de
la Definición 2.5.
Ejemplo 2.10. Si |x| < 1 entonces la sucesión xn = |x|n es monótona y
acotada, por lo cual es convergente, digamos a l ∈ R. De hecho, |x|n+1 =
|x|n |x| ≤ |x|n . De este modo, al hacer tender n al infinito concluimos del
Ejercicio 2.6 que |l| = |l| |x|. Por lo tanto limn xn = 0, si |x| < 1.
Ejemplo 2.11. Como (1 − x)(1 + x + x2 + · · · + xn ) = 1 − xn+1 , sabemos
que
1
1 − xn+1
=
,
lim 1 + x + x2 + · · · + xn = lim
n→∞
n→∞ 1 − x
1−x
siempre que |x| < 1.
Veamos ahora la aritmética de las sucesiones convergentes.
Teorema 2.12. Sean (xk )k y (yk )k sucesiones convergentes en R y sea
α ∈ R. Entonces:
i. La sucesión (αxk )k es convergente y lim αxk = α lim xk .
ii. La sucesión (xk +yk )k es convergente y lim xk +yk = lim xk +lim yk .
iii. La sucesión (xk yk )k es convergente y lim xk yk = (lim xk )(lim yk ).
iv. Si lim yk 6= 0 entonces, la sucesión (xk /yk )k es convergente y
xk
lim xk
lim
=
.
yk
lim yk
Prueba: Para i. el resultado es trivial si α = 0. Para ε > 0 y α 6= 0 tomamos
ε/|α| > 0 en la Definición 2.5 para tener para todo k ≥ K,
ε
= ε.
|αx − αxk | = |α| |x − xk | < |α|
|α|
Para ii. con ε/2 > 0 tanto para (xk )k como para (yk )k , existen respectivamente Kx (ε/2) y Ky (ε/2) en N que satisfacen la Definición 2.5. Al tomar
K = max{Kx , Ky } tenemos para todo k ≥ K(ε/|α|),
|(x + y) − (xk − yk )| ≤ |x − xk | + |y − yk | < ε.
Para iii. observamos que por ser convergente, la sucesion (yk )k es acotada,
digamos por M ∈ R. Ası́,
|xy − xk yk | = |xy − xyk + xyk − xk yk | ≤ |x| |y − yk | + |yk | |x − xk |
≤ |x| |y − yk | + M |x − xk |.
El resultado es entonces una consecuencia de los dos anteriores.
2 Sucesiones y convergencia
2.1 Sucesiones
9
Para iv. basta con usar iii. y el Ejercicio 2.7.
n1/n
1 + n1/n
n
−1 ,
Ejemplo 2.13. Veamos que limn
− 1 = 0. Como n =
por el binomio de Newton tenemos, para n ≥ 2
n
n = 1 + (n1/n − 1)
1
1
≥ 1 + n(n1/n − 1) + n(n − 1)(n1/n − 1)2 > n(n − 1)(n1/n − 1)2 .
2
2
De este modo,
r
2
1/n
0≤n
−1<
,
n−1
para todo n ≥ 2. El resultado sigue, con un poco de esfuerzo extra, del
Ejercicio 2.8.
Concluimos que limn n1/n = 1.
Un concepto fundamental en el estudio de las sucesiones es el de “subsucesión”. Intuitivamente una subsucesión es una selección de una cantidad
contable (tantos como elementos en N) de términos en la sucesión original,
respetando el orden en que aparecen.
Definición 2.14. Sea φ : N → N una función estrictamente creciente. Una
subsucesión de una sucesión (xk )k es una sucesión de la forma (f ◦ φ(k))k
donde xk = f (k) para una función f : N → R.
Observe que para cada k ∈ N existe un único n ∈ N con n = φ(k). A una
tal subsucesión la denotamos (xφ(k) )k = (xkn )n .
Ejemplo 2.15. La sucesión xk = 1 para todo k ∈ N es una subsucesión de
la sucesión ((−1)n )n . De hecho, basta con tomar φ(k) = 2k.
Teorema 2.16. Si (xk )k ⊂ R converge a x ∈ R entonces toda subsucesión
(xkn )n debe de converger al mismo punto x.
Prueba: Si lim xk = x y ε > 0, existe K ∈ N que satisface la Definición 2.5.
Si k ≥ K entonces por ser φ estrictamente creciente n = φ(k) ≥ φ(K) ≥ K
y ası́
|x − xkn | = |x − xφ(k) | < ε,
lo cual completa el resultado.
El siguiente es el primero de los grandes resultados del análisis que veremos en este curso. Para simplificar la presentación del mismo, vamos a
extraer la siguiente construcción de uso común.
Construcción 2.17. Sea (xn )n ⊂ R una sucesión acotada y sean a0 , b0 ∈ R
tales que xn ∈ [a0 , b0 ] para todo n ∈ N. Como
a0 + b0
a0 + b0 [
n∈N:
≤ xn ≤ b0 ,
N = n ∈ N : a0 ≤ xn ≤
2
2
uno de estos dos conjuntos debe de tener cardinalidad infinita (¿por qué?).
10
2 Sucesiones y convergencia
2.1 Sucesiones
Denotemos con A1 dicho conjunto y con a1 = a0 y b1 = (a0 + b0 )/2 si
A1 es el conjunto de la izquierda, o con a1 = (a0 + b0 )/2 y b1 = b0 , en caso
contrario.
Como
a1 + b1
a1 + b1 [
n ∈ A1 :
A1 = n ∈ A1 : a1 ≤ xn ≤
≤ xn ≤ b1 ,
2
2
uno de estos dos conjuntos debe de tener cardinalidad infinita.
Denotemos con A2 dicho conjunto y con a2 = a1 y b2 = (a1 + b1 )/2 si
A2 es el conjunto de la izquierda, o con a2 = (a1 + b1 )/2 y b2 = b1 , en caso
contrario.
Continuando con este proceso,
ak + bk
ak + bk [
Ak = n ∈ Ak : ak ≤ xn ≤
n ∈ Ak :
≤ xn ≤ bk ,
2
2
uno de estos dos conjuntos debe de tener cardinalidad infinita.
Denotemos con Ak+1 dicho conjunto y con ak+1 = ak y bk+1 = (ak +bk )/2
si Ak+1 es el conjunto de la izquierda, o con ak+1 = (ak + bk )/2 y bk+1 = bk ,
en caso contrario.
Hemos definido una colección de subconjuntos de N, cada uno de cardinalidad infinita,
N = A0 ⊇ A1 ⊇ A2 ⊇ · · · ⊇ Ak ⊇ · · · ,
y dos sucesiones monótonas de números reales (an )n y (bn )n tales que
b0 − a0
bk−1 − ak−1
=
,
2
2k
para todo n ∈ N. Por el Lema 2.9 existen a, b ∈ R tales que
bk − ak =
a = lim ak ≤ lim bk = b.
k→∞
k→∞
Como
b0 − a0
=0
k→∞
2k
0 ≤ b − a = lim bk − ak ≤ lim
k→∞
sabemos que a = b.
♦
Teorema 2.18. de Bolzano-Weierstrass en R. Toda sucesión acotada
en R posee una subsucesión convergente.
Prueba: Sea (xn )n una sucesión acotada de números reales y sean Ak , ak ,
bk y a = b como en la Construcción 2.17.
Definimos como xk0 cualquier elemento de la sucesión (xk )k que pertenece
a A1 . Como xk2 definimos cualquier elemento de la sucesión (xk )k que
pertenece a A2 de modo que k2 ≥ k1 (¿por qué es posible?). Sucesivamente,
como xkn definimos cualquier elemento de la sucesión (xk )k que pertenece
a An de modo que kn ≥ kn−1 .
2 Sucesiones y convergencia
2.1 Sucesiones
11
De este modo, hemos construido una subsucesión (xkn )n de la sucesión
(xk )k tal que xkn ∈ An , por lo cual an ≤ xkn ≤ bn . Por el Ejercicio 2.9
concluimos que lim xkn = a, como se deseaba.
La Definición 2.5 inspira la siguiente definición, como veremos en la demostración del Lema 2.21.
Definición 2.19. Una sucesión (xn )n ⊂ R es de Cauchy si y solo si para
todo ε > 0 existe N ∈ N tal que |xk − xm | < ε siempre que k, m ≥ N ;
Lema 2.20. Toda sucesión de Cauchy es acotada.
Prueba: Sea (xn )n una sucesión de Cauchy. Para ε = 1, por la Definición 2.19
existe K ∈ N tal que par todo k ≥ K se tiene |xk − xK | < 1. De este modo
|xn | ≤ max{|x0 |, |x1 |, . . . , |xK−1 |, |xK + 1|, |xK − 1|},
lo cual completa el resultado.
Lema 2.21. Toda sucesión convergente es de Cauchy.
Prueba: Sea ε > 0. Si lim xn = x entonces para ε/2 > 0 existe K ∈ N que
satisface la Definición 2.5. De este modo, si m y n son mayores que o iguales
a K se tiene
|xn − xm | ≤ |xn − x| + |x − xm | < ε,
lo cual completa el resultado.
Más interesante aún es el siguiente resultado el cual es el recı́proco del
lema anterior. Este nuevo resultado se obtiene a partir del Teorema de
Bolzano-Weierstrass con muy poco trabajo.
Proposición 2.22. Toda sucesión de Cauchy en R es convergente.
Prueba: Como toda sucesión de Cauchy es acotada, por el teorema de Bolzano-Weierstrass, toda sucesión de Cauchy posee una subsucesión convergente.
Sea entonces (xk )k una sucesión de Cauchy y sea (xkn )n una subsucesión
convergente, digamos a x ∈ R.
Para ε > 0 existen K1 (ε/2) y K2 (ε/2) en N que satisfacen respectivamente, la condición de Cauchy en la Definición 2.19 para la sucesión (xk )k ,
y la condición de convergencia en la Definición 2.5 para la sucesión (xkn )n .
De este modo, para kn y m mayores que o iguales al máximo entre K1 y K2
tenemos que
|xm − x| ≤ |xm − xkn | + |xkn − x| < ε,
lo cual completa el resultado.
El estudio de la convergencia de sucesiones va intimamente ligado al estudio de la continuidad de una función en un punto de su dominio. Evidencia
de este hecho es el siguiente resultado.
12
2 Sucesiones y convergencia
2.1 Sucesiones
Teorema 2.23. Caracterización de funciones continuas mediante
sucesiones. Sea f : A ⊂ R → R con A no vacı́o. Entonces f es continua
en a ∈ A si y solo si f (xk ) → f (a) para toda sucesión {xk }k ⊂ A tal que
xk → a.
Prueba: Supongamos primero que f es continua en a ∈ A y sea {xk }k ⊂ A
una sucesión tal que xk → a. Por la definición de continuidad, dado ε > 0
existe δ > 0 tal que si x ∈ A y |x − a| < δ entonces |f (x) − f (a)| < ε. Por
la Definición 2.5, existe K ∈ N tal que |xn − a| < δ siempre que n ≥ K. El
resultado es inmediato de estas dos condiciones.
Para el recı́proco supongamos por contradicción que f no es continua
en a ∈ A. Entonces existe ε > 0 para el cual, dado cualquier n ∈ N es
posible encontrar un elemento xn ∈ A de modo tal que |xn − a| < 1/n
(tomando δ = 1/n), pero |f (xn ) − f (a)| ≥ ε > 0. Evidentmemente la
sucesion (xn )n ⊂ A converge a a, pero (f (xn ))n no puede converger a f (a),
lo cual es una contradicción.
Ejemplo 2.24.
ln n
ln n/n
1/n
= ln lim e
= ln lim n
= 0,
lim
n→∞
n→∞
n→∞ n
gracias al Ejemplo 2.13.
Ejemplo 2.25. En el Ejercicio 2.23 se pide mostrar que la sucesión de
términos xn = (1 + 1/n)n es convergente. Su lı́mite es la llamada constante
de Napier e. Veamos ahora un artificio de cálculo para establecer que
1 n
lim 1 +
= e.
n→∞
n
Como la función x ln(1 + 1/x) es creciente, pues posee derivada siempre
positiva,
1
ln(1 + 1/x)
1
lim n ln 1 +
= lim x ln 1 +
= lim
= 1,
n→∞
x→∞
x→∞
n
x
1/x
usando la regla de L’Hôpital. Observe que el primer lı́mite es de sucesiones
y los otros dos son de funciones de variable real.
En conclusión
1 n
1
lim 1 +
= exp lim n ln 1 +
= e1 ,
n→∞
n→∞
n
n
como se deseaba indicar.
2 Sucesiones y convergencia
2.1 Sucesiones
13
2.1.1. Ejercicios.
Ejercicio 2.1. Calcule los lı́mites de las sucesiones cuyo término general
está dado por los siguientes criterios. Demuestre que su resultado es correcto.
ak = 1/k,
bk = 1 − 1/k 2 ,
ck = k/(k + 1),
dk = sen(1/k),
ek = ln(k √
+ 1) − ln(k), fk = 1/2k ,
2
2
gk = (k − 3k )/(k + k ), hk = k − k 2 + k,
ik = sen(πk),
jk = cos(1/k),
lk = cos(kπ/3),
mk =√
k sen(1/k),
√
nk = sen(k)/k,
ok = k 2 + 1 − k,
pk = 3 k 3 − 1 + 1.
Ejercicio 2.2. Estudie las sucesiones (sen n)n y (n sen n)n .
Sugerencia: La longitud del intervalo [π/6, 5π/6] es mayor que 2, por lo
cual existen dos números enteros en dicho intervalo.
Ejercicio 2.3. Sean p(x) y q(x) polinomos de coeficientes reales. Analice
la convergenia de la sucesiones (p(n)/q(n))n y (p(1/n)/q(1/n))n .
Ejercicio 2.4. Si (xn )n es una sucesión de números reales diferentes de
cero que converge a x 6= 0, muestre que inf{|xn | : n ∈ N} > 0.
Ejercicio 2.5. Demuestre el Lema 2.7.
Ejercicio 2.6. Muestre que si lim xn = x entonces lim |xn | = |x|.
Ejercicio 2.7. Si lim xn = x con x 6= 0 muestre que lim 1/xn = 1/x.
Sugerencia: Existe N ∈ N tal que xn 6= 0 para todo n ≥ N .
Ejercicio 2.8. Si limxn = x, limyn = y y xn ≤ yn para todo n ∈ N,
muestre que x ≤ y.
¿Qué se puede decir si x o y son ±∞?
Ejercicio 2.9. Si lim xn = lim yn y xn ≤ zn ≤ yn para todo n ∈ N, muestre
que lim xn = lim zn = lim yn .
Ejercicio 2.10. Muestre que lim xn = 0 si y solo si lim 1/|xn | = ∞.
√
Ejercicio 2.11. a) Sea a0 = 1 y para n ≥ 1 defina an = an−1 + 1. Muestre
que la sucesión (an )n es convergente y calcule su lı́mite.
b) Sea b0 = 1 y para n ≥ 1 defina bn = (b2n−1 + 2)/2bn−1 . Muestre que la
sucesión (bn )n es convergente y culcule su lı́mite.
c) Sea c0 = 1 y para n ≥ 1 defina cn = 3c2n−1 . Estudie la convergencia de
esta sucesión.
d) Sea d1 = 1 y para n ≥ 2 defina dn+1 = d2n /(n + 1). Muestre que lim dn =
0.
e) Sea e0 = 1 y para n ≥ 1 defina en = (en−1 +1)/3. Estudie la convergencia
de esta sucesión.
f) Sea f1 = 1 y para n ≥ 2 defina fn = (1 − 1/(4(n − 1)2 ))fn−1 . Estudie la
convergencia de esta sucesión.
14
2 Sucesiones y convergencia
2.1 Sucesiones
g) Sea g1 = 1 y para n ≥ 2 defina gn = (1 − 1/n2 ))gn−1 . Estudie la
convergencia de esta sucesión.
√
h) Sea h1 ≥ 0. Para n ≥ 1 defina hn+1 = 2 + hn . Estudie la convergencia
de esta sucesión.
√
i) Sea i1 ∈ [0, 1]. Para n ≥ 1 defina in+1 = 1 − 1 − in . Estudie la
convergencia de esta sucesión. Muestre además que si x1 ∈]0, 1[ entonces
lim xn+1 /xn = 1/2.
√
j) Sea j1 ∈]0, 3]. Para n ≥ 1 defina jn+1 = 2jn + 3. Muestre que esta
sucesión es creciente y que converge a 3.
√
k) Sea k1 ≥ 2. Para n ≥ 1 defina kn+1 = 1 + kn − 1. Muestre que esta
sucesión es decreciente y que converge a 2. ¿Qué sucede si 1 ≤ k1 < 2?
l) Sea l1 ∈ R. Para n ≥ 1 defina ln+1 = (1 + ln )/2. Muestre que esta
sucesión converge a 1.
m) Sea m1 ∈= 1. Para n ≥ 1 defina mn+1 = (2mn + 3)/4. Muestre que
esta sucesión converge a 2.
√
n) Sea n1 ∈= 1. Para k ≥ 1 defina nk+1 = 2nk . Muestre que esta sucesión
converge a 3/2.
Ejercicio 2.12. Muestre que 0.5 = 0.4999 . . .
Ejercicio 2.13. a) Muestre que dado x ∈ [0, 1[ existen enteros xk ∈ [0, 9],
k ∈ N, tales que
n
X
xk
x = lim
.
n→∞
10k
k=1
Sugerencias: Primero, si 0 ≤ y < 1/10n para algún n, muestre que existe
un tal entero yn tal que
yn
1
yn
≤ y < n+1 + n+1 .
10n+1
10
10
Segundo, si x ∈ [0, 1[ muestre que existen tales enteros xk de modo que
n
n
X
X
xk
xk
1
≤x<
+ n.
10
10k
10k
k=1
k=1
b) ¿Qué sucede si x es de la forma x = p/(2i 5j ) con p ∈ Z y i, j ∈ N? ¿Qué
sucede si no?
Ejercicio 2.14. Muestre que
lim x1/(2n−1) =
n→∞
1
0
−1
si x > 0,
si x = 0,
si x < 0.
Ejercicio 2.15. Sea (xn )n una sucesión de números reales diferentes de
cero tal que lim |xn+1 /xn | = l ∈ R.
2 Sucesiones y convergencia
2.1 Sucesiones
15
(1) Muestre que si l < 1 entonces lim xn = 0.
(2) Muestre que si l > 1 entonces lim |xn | = ∞.
(3) ¿Qué sucede si l = 1?
Ejercicio 2.16. Para p > 0 estudie la sucesión (an /np )n donde a ∈ R.
Ejercicio 2.17. Estudie la sucesión (an /n!)n donde a ∈ R.
Ejercicio 2.18. Muestre que si lim xn = x ∈ R entonces
x0 + · · · + xn−1
lim
= x.
n
Ejercicio 2.19. Muestre que si |xn+1 − xn | < 2−n para todo n ∈ N entonces
la sucesión (xn )n es de Cauchy.
¿Qué sucede si |xn+1 − xn | < 1/n?
Ejercicio 2.20. Muestre que si para todo n ∈ N
|xn+2 − xn+1 | ≤ C|xn+1 − xn |,
para alguna constante C ∈]0, 1[ entonces la sucesión (xn )n es de Cauchy.
Ejercicio 2.21. Muestre que si
1+n
1 + n + 2n2
entonces la sucesión (xn )n es de Cauchy.
|xn | ≤
Ejercicio 2.22. Sea a ∈ R con a > 0. Muestre que limn a1/n = 1.
Sugerencia: para a > 1 y n suficientemente grande, compare con el Ejemplo 2.13. Para 0 < a < 1 se tiene que 1/a > 1.
Ejercicio 2.23. Muestre que la sucesión dada por (1 + 1/n)n es creciente
y acotada, por lo cual es convergente. Su valor de convergencia es la constante e, y esta es una de las formas históricas de definir el valor de dicha
constante.
Sugerencia: Para mostrar que la sucesión es creciente considere su expanción binomial y use los siguientes dos hechos. Primero que n!/(n − k)!
tiene k factores. Segundo que 1 − k/n < 1 − k/(n + 1).
Para mostrar que la sucesión está acotada use nuevamente su expanción
binomial y los siguientes dos hechos. Primero que 1/k! < 1/2k−1 para todo
k ≥ 2. Segundo que n(n − 1) · · · (n − (k − 1)) < nk .
Ejercicio 2.24. Sea A ⊆ R un subconjunto no vacı́o y acotado superiormente de números reales. Muestre que existe una sucesión (xn )n ⊂ A tal
que lim xn = sup A.
Ejercicio 2.25. Muestre que para todo x ∈ R existe {xk } ⊂ Q tal que
xk → x.
Ejercicio 2.26. Si {xk }k y {yk }k son sucesiones en R tales que xk → 0 y
{yk }k es acotada muestre que xk yk → 0.
16
2 Sucesiones y convergencia
2.2 Lı́mites superior e inferior
Ejercicio 2.27. Muestre que toda sucesión (xn )n ⊂ R posee una subsucesión
monótona.
Sugerencia: Haga dos casos. Primero suponga que existen infinitos términos xn con la siguiente propiedad: “ xm < xn para todo m > n”. Segundo suponga que existen solo una cantidad finita de términos con dicha
propiedad.
Ejercicio 2.28. Caracterización de lı́mites mediante sucesiones.
Para a ∈ R, A ⊂ R un conjunto abierto, y f : A \ {a} → R muestre
que el lı́mite limx→a f (x) existe y es igual a l ∈ R si y solo si f (xk ) → l para
toda sucesión {xk }k ⊂ A \ {a} tal que xk → a.
2.2. Lı́mites superior e inferior. De la Definición 2.5 vemos que la convergencia de una sucesión (xn )n queda determinada por los conjuntos {xn :
n ≥ K}, con K ∈ N. Por ejemplo, es evidente que si (xn )n es una sucesión
convergente de números reales entonces
aK := inf{xn : n ≥ K} ≤ lim xn ≤ sup{xn : n ≥ K} =: bK .
n
Observe que
a1 ≤ a2 ≤ · · · ≤ aK ≤ · · ·
· · · ≤ bK ≤ · · · ≤ b2 ≤ b1 .
y
Por el Lema 2.9 existen a y b en R tales que
a = lim an ≤ lim bn = b,
n
n
dado que ak ≤ bK para todo K. En consecuencia,
a ≤ lim xn ≤ b.
n
A continuación extendemos este concepto para sucesiones que no son necesariamente convergentes.
Definición 2.26. Sea (xn )n una sucesión de números reales. Definimos el
lı́mite superior y el lı́mite inferior respectivamente mediante
lim sup xn := lim sup{xn : n ≥ K},
K→∞
lim inf xn := lim inf{xn : n ≥ K},
K→∞
siempre que (xn )n sea una sucesión acotada superior o inferiormente.
Si (xn )n no es acotada superiormente definimos lim sup xn := +∞. Si
(xn )n no es acotada inferiormente definimos lim inf xn := −∞.
Evidentemente lim inf xn ≤ lim sup xn para toda sucesión de números
reales. Más aún, como
inf{xn : n ≥ K + 1} ≥ inf{xn : n ≥ K}
y
sup{xn : n ≥ K + 1} ≤ sup{xn : n ≥ K},
2 Sucesiones y convergencia
2.2 Lı́mites superior e inferior
17
se tiene el siguiente resultado, cuya demostración es el Ejercicio 2.29 para
el lector.
Lema 2.27. Para cualquier sucesión de números reales (xn )n se tiene que
lim inf xn = sup{inf{xk : k ≥ n} : n ≥ N }
y
lim sup xn = inf{sup{xk : k ≥ n} : n ≥ N }.
Intuitivamente lim sup xn es el más grande valor al cual una cantidad
infinita de los xn se pueden acercar.
Lema 2.28. Sea (xn )n una sucesión de números reales. El lı́mite superior
de la sucesión es el mayor valor al cual alguna subsucesión de (xn )n puede
converger. Respectivamente, el lı́mite inferior de la sucesión es el menor
valor al cual alguna subsucesión de (xn )n puede converger.
En otras palabras, si (xkn )n es una subsucesión de (xn )n con xkn → x,
entonces
lim inf xn ≤ x ≤ lim sup xn .
Prueba: Sea (xkn )n es una subsucesión de (xn )n con xkn → x. Fijemos
N por un momento y tomemos K suficientemente grande de modo que si
n ≥ K entonces kn ≥ N . De este modo,
inf{xm : m ≥ N } ≤ xkn ≤ sup{xm : m ≥ N },
para todo n ≥ K. Al tomar el lı́mite cuando n → ∞ concluimos que
inf{xm : m ≥ N } ≤ x ≤ sup{xm : m ≥ N }.
El resultado se obtiene al tomar el lı́mite cuando N → ∞.
Nota. Para referirse a suceciones (xn )n tales que son convergentes on bien
lim xn = ±∞, algunos autores dicen que la sucesión (xn )n es convergente
en los “reales extendidos”.
♦
Ejemplo 2.29. Consideremos la sucesión (cos(nπ/2))n , la cual esta dada
por
(1, 0, −1, 0, 1, 0, −1, 0, . . . ).
En este caso
lim sup cos(nπ/2) := lim sup{cos(nπ/2) : n > K} = 1,
K→∞
lim inf cos(nπ/2) := lim inf{cos(nπ/2) : n > K} = −1,
K→∞
y sin embargo la sucesión no es convergente.
Teorema 2.30. Sea (xn )n una sucesión de números reales. Existen subsucesiones (xnj )j y (xnk )k tales que
lim xnj = lim inf xn
j→∞
y
lim xnk = lim sup xn .
k→∞
18
2 Sucesiones y convergencia
2.2 Lı́mites superior e inferior
Prueba: Veamos el caso para el lı́mite inferior. El caso del lı́mite superior
se deja como Ejercicio 2.39 para el lector.
Si lim inf xn = −∞ entonces, por definición, la sucesión (xn )n no es
acotada inferiomente. Para N = 1 existe n1 ∈ N para el cual xn1 ≤ −1.
Para N = 2 existe n2 ∈ N, el cual podemos tomar de modo que n2 > n1 ,
con xn2 ≤ −2. Evidentemente podemos construir una subsucesión xnN tal
que xnN ≤ −N , lo cual completa el resultado.
Si lim inf xn = +∞ entonces xN ≥ inf{xn : n ≥ N } → ∞. En particular,
lim xn = +∞.
Si lim inf xn = a ∈ R, tomemos n0 = 0. Por la caracterización del ı́nfimo
de un conjunto, existe n1 tal que
inf{xn : n ≥ n0 } ≤ xn1 < inf{xn : n ≥ n0 } + 1.
Similarmente, existe n2 ≥ n1 + 1 tal que
1
inf{xn : n ≥ n1 + 1} ≤ xn2 < inf{xn : n ≥ n1 + 1} + .
2
Continuando con este proceso, existe nk ≥ nk−1 + 1 tal que
1
inf{xn : n ≥ nk−1 + 1} ≤ xnk < inf{xn : n ≥ nk−1 + 1} + ,
k
para todo k ∈ N.
Como (inf{xn : n ≥ nk + 1})k es una subsucesión de (inf{xn : n ≥ k})k ,
también tienen por lı́mite a. Como conclusión, xnk → a cuando k → ∞. Estamos listos para caracterizar lı́mites de sucesiones en términos de
lı́mites superiores e inferiores.
Teorema 2.31. Sea (xn )n una sucesión de números reales. Se tiene que
lim xn = x ∈ R (o lim xn = ±∞, respectivamente), si y solo si lim inf xn =
x = lim sup xn (o lim inf xn = ±∞ = lim sup xn , respectivamente).
Prueba: Si (xn )n es una sucesión de números reales tal que lim xn = x ∈ R
(o bien lim xn = ±∞), entonces por el Teorema 2.16 toda subsucesión posee
el mismo tipo de convergencia. El resultado sigue del Teorema 2.30.
Para el recı́proco supongamos primero que lim inf xn = ±∞ = lim sup xn .
Multiplicando la sucesión por −1 de ser necesario, podemos asumir que
lim inf xn = ∞ = lim sup xn . Como xk ≥ inf {xn : n ≥ k}, se concluye
trivialmente que lim xn = ∞.
Supongamos ahora que lim inf xn = x = lim sup xn , para algún x ∈ R.
Dado ε > 0 podemos elegir un K ∈ N que satisface simultaneamente
ε
ε
y
x − inf{xk : k ≥ K} < .
sup{xk : k ≥ K} − x <
2
2
Si n, m ∈ N son ambos mayores que o iguales a K tenemos, suponiendo que
xn ≥ xm (por la Ley de Tricotomı́a),
|xn − xm | = xn − xm ≤ sup{xk : k ≥ K} − x + x − inf{xk : k ≥ K} < ε.
2 Sucesiones y convergencia
2.2 Lı́mites superior e inferior
19
De este modo la sucesión (xn )n es de Cauchy y por lo tanto, es convergente.
Una vez más, por el Teorema 2.16 toda subsucesión converge al mismo lı́mite,
y el resultado sigue del Teorema 2.30.
Teorema 2.32. Sea (xn )n una sucesión de números reales diferentes de
cero. Entonces
xn+1 xn+1 1/n
1/n
.
lim inf ≤ lim inf |xn |
≤ lim sup |xn |
≤ lim sup xn xn Prueba: La segunda de las desigualdades es inmediata. Vamos a probar la
primera, y dejamos la tercera como Ejercicio 2.30 para el lector.
Si lim inf |xn+1 /xn | = 0 el resultado es trivial.
Supongamos que lim inf |xn+1 /xn | = a ∈ R con a > 0. Nuestra estrategia es mostrar que lim inf |xn |1/n ≥ b para todo b < a (¿por qué es esto
suficiente?). Observe además que esta afirmación es trivial si b ≤ 0.
Si a > b > 0 entonces,
xn+1 xn+1 = lim inf :n≥K .
b < a = lim inf xn K→∞
xn Por ser creciente la sucesión de la derecha, existe un K ∈ N tal que
xn+1 xn+1 : n ≥ K , y entonces b < b < inf xn , para todo n ≥ K.
xn Para n > K escribimos
xn xn−1 xK+1 |xK | > bn |xK | .
···
|xn | = xn−1 xn−2 xK bK
En particular, para todo n > K se tiene que
|xK | 1/n
|xK | 1/n
1/m
|xn |1/n > b
y
entonces
inf{|x
|
:
m
≥
n}
≥
b
,
m
bK
bK
donde la constante |xK |/bK es positiva. Al tomar el lı́mite cuando n tiende
a infinito concluimos que lim inf |xm |1/m ≥ b, como se deseaba, gracias al
Ejercicio 2.22.
Corolario 2.33. Si lim |xn+1 /xn | existe y es igual a x entonces también
lim |xn |1/n existe y es igual a x.
Prueba: Basta aplicar los Teoremas 2.31 y 2.32.
Ejemplo 2.34. Para xn = n! en el Teorema 2.32 obtenemos
lim n + 1 = lim inf n + 1 ≤ lim inf (n!)1/n ≤ lim (n!)1/n .
Por lo tanto lim (n!)1/n = +∞. Al estudiar la fórmula de Stirling veremos
un resultado más preciso al respecto del crecimiento de n!.
20
2 Sucesiones y convergencia
2.2 Lı́mites superior e inferior
Ejemplo 2.35. Para xn = n!/nn en el Teorema 2.32 obtenemos
nn
(n!)1/n
(n!)1/n
nn
≤
lim
inf
.
≤
lim
sup
≤
lim
inf
(n + 1)n
n
n
(n + 1)n
Por el Ejemplo 2.25,
(n!)1/n
1
lim
= .
n
e
lim inf
2.2.1. Ejercicios.
Ejercicio 2.29. Demuestre el Lema 2.27.
Ejercicio 2.30. Muestre la tercer desigualdad en el Teorema 2.32.
Ejercicio 2.31. Muestre que lim inf xn = − lim sup −xn .
Ejercicio 2.32. Sea (xn )n una sucesión de números reales. Muestre que si
todos los xn excepto una cantidad finita están en el intervalo [a, b] entonces
ambos lim inf xn y lim sup xn están en dicho intervalo.
Ejercicio 2.33. Si xn ≤ yn para todo n ∈ N, muestre que lim sup xn ≤
lim sup yn y lim inf xn ≤ lim inf yn .
Ejercicio 2.34. Para (xn )n y (yn )n sucesiones de números reales tales que
lim xn existe, muestre que
lim inf xn + yn = lim xn + lim inf yn ,
lim sup xn + yn = lim xn + lim sup yn .
Ejercicio 2.35. Muestre que una sucesion (xn )n de números reales es acotada superiormente si y solo si lim sup xn < +∞, y que es acotada inferiormente si y solo si lim inf xn > −∞
Ejercicio 2.36. Para (xn )n y (yn )n sucesiones de números reales, muestre
que
lim inf xn + lim inf yn ≤ lim inf xn + yn
≤ lim sup xn + lim sup yn ≤ lim sup xn + yn ,
siempre que ninguna de las sumas sea de la forma “ ∞ − ∞”.
Ejercicio 2.37. Sean (xn )n y (yn )n sucesiones de números reales.
a) Si 0 ≤ xn y 0 ≤ yn muestre que
lim sup xn yn ≤ lim sup xn lim sup yn ,
siempre que ninguno de los productos sea de la forma “ 0∞”.
b) Si xn ≤ 0 ≤ yn muestre que
lim inf xn lim sup yn ≤ lim inf xn yn ,
siempre que ninguno de los productos sea de la forma “ 0∞”.
2 Sucesiones y convergencia
2.3 Topologı́a muy básica
21
Ejercicio 2.38. Para (xn )n y (yn )n sucesiones de números reales no negativos tales que lim xn existe o bien es ∞, muestre que
lim sup xn yn = lim xn lim sup yn ,
siempre que ninguno de los productos sea de la forma “ 0∞”.
Ejercicio 2.39. Complete la demostración del Teorema 2.30 para el caso
del lı́mite superior.
2.3. Topologı́a muy básica. En estas sección damos nuestros primeros y
pequeños pasos en topologı́a. Nuestra intención es caracterizar conjuntos
“abiertos” y “cerrados” en R apartir de sucesiones.
Definición 2.36. Decimos que un conjunto A ⊂ R es abierto si para todo
x ∈ A existe ρ > 0 tal que
Bρ (x) = {y ∈ R : |x − y| < ρ} ⊂ A.
Decimos que un conjunto C ⊂ R es cerrado si su complemento R \ C es
abierto.
Ejemplos 2.37. (1) Los intervalos de la forma ]a, b[ con a < b en R, ]a, ∞[
y ] − ∞, b[ son conjuntos abiertos.
(2) Los intervalos de la forma [a, b] con a < b en R, [a, ∞[ y ] − ∞, b] son
conjuntos cerrados.
(3) Los intervalos de la forma [a, b[ y ]a, b] con a < b en R, no son ni abiertos
ni cerrados. Además, observe que un conjunto que no es abierto, no es necesariamente cerrado, y un conjunto que no es cerrado, no es necesariamente
abierto.
(4) Trivialmente R es abierto y ası́ ∅ es cerrado. Por definición, ∅ es abierto
(¿por qué?) por lo cual R es cerrado. De este modo R y ∅ son abiertos y
cerrados a la vez. Ningún otro subconjunto de R posee dicha propiedad. Veamos ahora como caracterizar conjuntos cerrados en términos de lı́mites
de sucesiones convergentes contenidas en el conjunto. Para ello definimos
“puntos lı́mite”.
Definición 2.38. Dado un conjunto B ⊂ R, un punto x ∈ R es un punto
lı́mite de B si existe una sucesión {xk }k ⊂ B la cual converge a x.
Proposición 2.39. Un subconjunto C ⊂ R es cerrado si y solo si C posee
todos sus puntos lı́mite.
Prueba: Supongamos primero que C es cerrado y que existe una sucesión
{xk }k de elementos de C que converge a un x ∈ R \ C, el cual es abierto
en R. Por pertenecer x a un conjunto abierto, y por converger la sucesión
a x, podemos encontrar un ε > 0 y un N ∈ N tales que Bε (x) ⊂ R \ C y
22
2 Sucesiones y convergencia
2.3 Topologı́a muy básica
xk ∈ Bε (x) para todo k ≥ N . Esto es una contradicción pues cada uno de
estos xk estarı́a en C ∩ (R \ C). De este modo si C es cerrado debe de poseer
todos sus puntos lı́mite.
En la otra dirección supongamos que C ⊂ R posee todos sus puntos lı́mites
y no es cerrado. De este modo R \ C no es abierto por lo que que existe
x ∈ R \ C para el cual cualquier bola abierta centrada en x interseca a su
complemento, C. Vamos a tomar ventaja de este hecho para construir una
sucesión de elementos de C que converge a x y ası́ obtener una contradicción.
Para cada k ∈ N elija xk ∈ C ∩ B1/k (x) de modo que |xk − x| < 1/k.
Evidentemente xk → x por lo cual x es un punto lı́mite de C. Por hipótesis
x ∈ C y ası́ x ∈ C ∩ (R \ C) lo cual es una contradicción. De este modo C
es cerrado y completamos la prueba del resultado.
El último concepto que queremos ver en esta introducción es el de conjunto
“compacto”. Por ahora nos conformamos con la definición y un par de
observaciones.
Definición 2.40. Sea K un subconjunto de R. Un cubrimiento por
abiertos (o simplemente un cubrimiento abierto) para K S
es cualquier
colección {Vα }α∈A de conjuntos abiertos Vα ⊂ R tales que K ⊂ α∈A Vα . El
conjunto K se dice ser compacto si y solo si todo cubrimiento
por abiertos
S
para K posee un subcubrimiento finito,
S i.e., si K ⊂ α∈A Vα existe un
subconjunto finito A0 ⊂ A tal que K ⊂ α∈A0 Vα .
Lema 2.41. Si K es compacto entonces K es acotado.
S
Prueba: De hecho K ⊂ k∈N Bk (0). Por ser compacto, existe una cantidad finita de tales bolas abiertas que recubren K. Como dichas bolas son
concéntricas, es suficiente con tomar aquella de mayor radio, digamos r,
para obtener K ⊂ Br (0).
Lema 2.42. Si C es cerrado y C ⊂ K con K compacto entonces C es
compacto.
Prueba: De hecho, si {Vα }α∈A es un cubrimiento por abiertos para C entonces {R \ C} ∪ {Vα }α∈A es un cubrimiento abierto para K, el cual es
compacto. De Seste modo, existe un
S subconjunto finito A0 ⊂ A tal que
K ⊂ (R \ C) ∪ α∈A0 Vα y ası́ C ⊂ α∈A0 Vα .
Nuestro próximo gran objetivo es demotrar que los conjuntos cerrados
y acotados en R son precisamente los conjuntos compactos. En la literatura, la parte técnia de la prueba consiste en mostrar que todo conjunto
cerrado y acotado en R es compacto. Como es usual, vamos a presentar
un resultado previo que nos ayudará en dicha tarea. Es recomendable que
el estudiante visite las referencias para aprender diferentes formas de lidiar
con dicha tecnicalidad.
2 Sucesiones y convergencia
2.3 Topologı́a muy básica
23
Lema 2.43. del cubrimiento de Borel. Sea K ⊂ R un subconjunto
cerrado y acotado y sea p : K → R+ una función real y positiva definida
sobre K. Entonces existe una cantidad finita de puntos x1 , . . . , xN en K
tales que
N
[
K⊂
Bp(xj ) (xj ).
j=1
S
Prueba: Observe como K ⊂ x∈K Bp(x) (x). El primer paso es sustituir esta
colección de abiertos que cubren a K por una colección contable. Segundo,
argumentando por contradicción y haciendo uso del Teorema de BolzanoWeierstrass, construiremos una sucesión de elementos de K que converge a
un punto x el cual estará en K y en su complemento al mismo tiempo.
Sea x0 ∈ K y tome a ∈ Q tal que |x0 −a| < p(x0 )/4 (por densidad de Q en
R). Tome ρ ∈ Q tal que p(x0 )/4 < ρ < p(x0 )/2. De este modo x0 ∈ Bρ (a).
Veamos que Bρ (a) ⊂ Bp(x0 ) (x0 ). De hecho, si x ∈ Bρ (a) tenemos que
|x0 − x| ≤ |x0 − a| + |a − x| < ρ + ρ < p(x0 ).
Como resultado concluimos que existen ai y ρi en Q tales que
∞
[
K⊂
Bρi (ai ).
i=1
Supongamos ahora por contradicción que el enunciado es falso (¿qué
S
quiere decir esto?). Si k ∈ N, entonces kj=1 Bρj (aj ) no puede cubrir K pues
S
si lo hiciera, habrı́a un cubrimiento finito para K de la forma N
j=1 Bp(xj ) (xj ),
con cada xj en K. De este modo, para cada k ∈ N existe xk ∈ K tal que
S
xk ∈
/ kj=1 Bρj (aj ).
Por el Teorema de Bolzano-Weierstrass, por ser K acotado, la sucesión
{xk }k posee una subsucesı́on {xkj }j convergente, digamos a un punto x. Por
la Proposición 2.39, por ser K cerrado, x ∈ K, y ası́, existe i0 ∈ N tal que
x ∈ Bρi0 (ai0 ).
Como xkj → x, existe N ∈ N tal que xkj ∈ Bρi0 (ai0 ), para todo kj ≥
N . En particular, cuando kj > i0 , por la construcción de los xk , xkj ∈
/
S i0
/ Bi0 (ai0 ). Esto es una contradicción y se
j=1 Bρj (aj ), y entonces, xkj ∈
concluye el resultado.
Teorema 2.44. de Heine-Borel. Un subconjunto K ⊂ R es compacto si
y solo si es cerrado y acotado.
Prueba: Ya sabemos del Lema 2.41 que todo conjunto compacto en R es
acotado.
Supongamos ahora que K es compacto y que K no es cerrado. Por la
Proposición 2.39, existe una sucesión {xk }k ⊂ K tal que xk → x ∈
/ K.
Considere la función p : K → R+ definida para y ∈ K mediante p(y) =
|x − y|/2, el cual es positivo pues x ∈
/ K.
24
2 Sucesiones y convergencia
2.3 Topologı́a muy básica
S
Observe como K ⊂ y∈K Bp(y) (y), y por ser K compacto, podemos elegir
S
y1 , . . . , yN ∈ K tales que K ⊂ N
j=1 Bp(yj ) (yj ).
Sea p = min{p(y1 ), . . . , p(yN )}. Como xk → x, xk ∈ Bp (x) para todo
k suficientemente grande. Si tomamos cualquiera de estos xk tenemos que
xk ∈ Bp(yj ) (yj ) para algún j ∈ {1, . . . , N }, y ası́,
p(yj ) > |xk − yj | ≥ |x − yj | − |xk − x| = 2p(yj ) − |xk − x|
> 2p(yj ) − p = p(yj ) + p(yj ) − p ≥ p(yj ),
lo cual es una contradición. De este modo, si K ⊂ R es compacto, entonces
K es cerrado.
Ahora suponemos que K ⊂ R es cerrado y acotado. Sea {Vα }α∈A un
cubrimiento por abiertos para K. Definimos p : K → R+ de la siguiente
manera. Si x ∈ K entonces x ∈ Vα para algún α ∈ A. Como Vα es abierto,
existe p(x) > 0 tal que Bp(x) (x) ⊂ Vα . Por el Lema del cubrimiento de
Borel, existen x1 , . . . , xN ∈ K tales que
K⊂
N
[
j=1
Bp(xj ) (xj ) ⊂
N
[
Vαj .
j=1
De este modo obtenemos un subcubrimiento finito y concluimos que K es
compacto.
Nota. Obseve como el Teorema de Heine-Borel deja de ser válido si se
suprimen cualquiera de las hipótesis. De hecho, ninguno de los cubrimientos
por abiertos
[
[1
1
1
,1 −
,
[1, ∞[ =
1 − ,n ,
]0, 1[ =
n
n
n
n∈N
n∈N
posee un subcubrimiento finito.
♦
2.3.1. Ejercicios.
Ejercicio 2.40. Sea (In )n una sucesión de intervalos compactos (cerrados
y acotados) en R con la propiedad
I0 ⊇ I1 ⊇ · · · ⊇ In ⊇ · · ·
T
a. Muestre que n In 6= ∅.
b. Verifique con un ejemplo que el resultado no es cierto si los intervalos
son abiertos.
c. Verifique con un ejemplo que el resultado no es cierto si los intervalos
son cerradas y no acotados.
Ejercicio 2.41. Muestre que:
(1) Uniones arbitrarias de conjuntos abiertos son conjuntos abiertos.
(2) Uniones finitas de conjuntos cerrados son conjuntos cerrados.
2 Sucesiones y convergencia
2.3 Topologı́a muy básica
25
(3) Intersecciones arbitrarias de conjuntos cerrados son conjuntos cerrados.
(4) Intersecciones finitas de conjuntos abiertos son conjuntos abiertos.
(5) Existen uniones arbitrarias de conjuntos cerrados que no son conjuntos cerrados.
(6) Existen intersecciones arbitrarias de conjuntos abiertos que no son
conjuntos abiertos.
(7) Si A es un conjunto abierto y C es un conjunto cerrado respectivamente en R, entonces A \ C es abierto y C \ A es cerrado.
Ejercicio 2.42. Se define la frontera Fr(A) de un conjunto A ⊂ R como
el conjunto de puntos x ∈ R tales que para todo ε > 0 el conjunto Bε (x)
interseca a ambos, A y R \ A. Cada uno de estos puntos se llama punto
frontera.
Sea A ⊂ R un conjunto no vacı́o y sea x ∈ R. Muestre que x es un punto
frontera de A si y solo si existen dos sucesiones, {xk }k ⊂ A y {yk }k ⊂ R \ A
tales que xk → x y yk → x.
Ejercicio 2.43. Sea {xk }k ⊂ R una sucesión convergente a un punto x ∈ R.
Muestre que {x} ∪ {xk : k ∈ N} es un conjunto compacto.
Ejercicio 2.44. Muestre que K ⊂ R es compacto si y solo si toda sucesión
contenida en K posee un punto lı́mite que pertence a K.
Ejercicio 2.45. Un subconjunto L ⊂ R se llama secuencialmente compacto si y solo si toda sucesión {xk }k ⊂ L posee una subsucesión convergente, cuyo lı́mite pertenece a L.
a) Pruebe que todo conjunto compacto en R es secuencialmente compacto.
b) Muestre que R no es secuencialmente compacto.
Ejercicio 2.46. Sea A ⊂ R. Un punto x ∈ R se dice ser un punto de
acumulación de A si A ∩ Bε (x) contiene infinitos puntos para cualquier
ε > 0.
a) Pruebe que x es un punto de acumulación de A si y solo si para cada
ε > 0, (A ∩ Bε (x)) \ {x} es diferente de vacı́o.
b) Otra versión del Teorema de Bolzano-Weierstras. Pruebe
que todo subconjunto infinito y acotado de R posee almenos un punto
de acumulación.
Ejercicio 2.47. Sea C un conjunto cerrado y no vacı́o en R. Muestre que
si inf{|x − z| : z ∈ C} = 0 entonces x ∈ C.
Ejercicio 2.48. Teorema de Intersección de Cantor. Sea {Kk }k una
sucesión de conjuntos cerrados y no vacı́os en R tales que Kk+1 ⊂ Kk para
todo k ∈ N, con K1 acotado. Muestre que existe un x ∈ R tal que x ∈ Kk
para todo k ∈ N.
26
2 Sucesiones y convergencia
2.3 Topologı́a muy básica
Ejercicio 2.49. Sea f : K ⊂ R → R una función continua con K compacto
y no vacı́o. Usando el ejercicio anterior defina
|f |K := sup{|f (x)| : x ∈ K}.
Una sucesión de funciones fk : K → R se dice ser uniformemente convergente en K a una función f : K → R si y solo si para todo ε > 0 existe
un N ∈ N tal que k ≥ N y x ∈ K implican |fk (x) − f (x)| < ε.
a) Muestre que fk → f uniformemente en K si y solo si |fk − f |K → 0.
b) Pruebe que una sucesión de funciones {fk }k en K converge uniformemente si y solo si es de Cauchy con respecto a | |K , i.e. para
todo ε > 0 existe un N ∈ N tal que k, l ≥ N implica |fk − fl |K < ε.
Ejercicio 2.50. Sea B = {x ∈ R : |x| < 1} y sea f : B → B tal que
|f (x)| < |x| para todo x 6= 0. Tome x1 ∈ B \ {0}. Defina la sucesión
{xk }k ⊂ B mediante xk+1 = f (xk ) para todo k > 1. Muestre que lim xk = 0.
Ejercicio 2.51. Una función f : A ⊂ R → R se dice ser de Lipschitz si
existe una constante C > 0 tal que
|f (x) − f (y)| ≤ C|x − y|,
para todo x, y ∈ A.
Si 0 < C < 1 decimos que f es una contracción.
Si f : A ⊂ R → R, un punto a ∈ A se dice ser un punto fijo para f si
f (a) = a.
a) Teorema del punto fijo para contracciones. Muestre que si
f : R → R es una contracción entonces, f posee un único punto fijo.
Sugerencia: defina la sucesión {xk }k ⊂ R mediante xk+1 = f (xk )
con x1 ∈ R arbitrario.
b) Sea f : {x ∈ R : |x| ≤ B} → R una contracción de constante C tal
que |f (0)| ≤ B(1 − C). Muestre que la sucesón definida mediante
recursividad por la fórmula: x1 = 0, xk+1 = f (xk ), para k ≥ 2
converge a un único punto fijo de f en {x ∈ R : |x| ≤ B}.
c) Dé un ejemplo de una función f : R → R tal que |f (x) − f (y)| =
|x − y| para todo x, y en R que no tenga puntos fijos. ¿Por qué no
se contradice el Teorema del punto fijo para contracciones?
Ejercicio 2.52. Sea f : K ⊂ R → R una función continua. Si K es
compacto en R usando el Teorema de Heine-Borel muestre que f (K) es
compacto en R.
Sugerencia: para mostrar que f (K) es cerrado tome una sucesion {yk }k ⊂
f (K) tal que yk → y para algún y ∈ R y muestre que y ∈ f (K).
Para mostrar que f (K) es acotado suponga que no lo es y argumente por
contradicción.
27
3. Continuidad uniforme
En este capı́tulo estudiamos el concepto de continuidad uniforme. En
particular nos interesa concluir que toda función continua, definida en un
intervalo compacto (i.e. cerrado y acotado), es uniformemente continua.
3.1. Continuidad uniforme.
La continuidad es una propiedad local de las funciones. Una función dada
pude ser continua alrededor de un punto de su dominio y no serlo alrededor
de otro punto de su dominio.
La continuidad mide que tan cerca están las imágenes correspondientes
a preimágenes cercanas, y dicha cercanı́a también es local dado que puede
depender del punto en cuestión. Recordemos que una función f : A ⊆ R →
R es continua alrededor de un punto a ∈ A si para todo ε > 0, existe un
δ = δ(a, ε) > 0 que depende de a y de ε, de modo tal que si |x − a| < δ con
x ∈ A entonces |f (x) − f (a)| < ε. Esta dependencia de a y de ε es central
en esta sección.
Ejemplos 3.1. (1) Consideremos la función f : R → R dada por f (x) =
x + 2. Como |f (x) − f (a)| = |x − a|, basta con tomar δ = ε para demostrar
que esta función es continua en cualquier punto a, independientemente del
valor de a.
(2) Consideremos ahora la función f : ]0, ∞[→ R dada por f (x) = 1/x. De
la relación
1 1 |x − a|
,
|f (x) − f (a)| = − =
x a
|xa|
vemos que la cercanı́a entre las imágenes f (x) y f (a) depende no solo de la
cercanı́a de las preimágenes x y a, si no del valor de las mismas. De hecho,
si a es grande, x también lo es, y el cociente anterior es pequeño para x
no necesariamente muy cercano a a. Si a es pequeño, x también lo es, y el
cociente anterior es pequeño solamente si x es muy cercano a a.
f (x)
f (a)
f (x)
f (a)
ax
a
x
Definición 3.2. Una función f : A ⊆ R → R es uniformemente continua
en A si para todo ε > 0, existe un δ = δ(ε) > 0 que depende solo de ε, de
modo tal que si |x − y| < δ entonces |f (x) − f (y)| < ε, para todo x, y en A.
28
3 Continuidad uniforme
3.1 Continuidad uniforme
Cuando estudiamos funciones continuas, fué posible caracterizar la continuidad a partir de sucesiones convergentes (véase el Teorema 2.23). El
siguiente resultado caracteriza la no continuidad uniforme a partir de la
existencia de dos sucesiones con una caracterı́stica particular.
Lema 3.3. Criterio de continuidad uniforme. Los siguientes enunciados son equivalentes.
(1) La función f : A ⊆ R → R no es uniformemente continua en A.
(2) Existe ε > 0 para el cual, para todo δ > 0 existen x = x(δ) y y = y(δ)
en A tales que |x − y| < δ pero |f (x) − f (y)| ≥ ε.
(3) Existe ε > 0 y existen dos sucesiones (xn )n y (yn )n en A tales que
lim xn − yn = 0 pero |f (xn ) − f (yn )| ≥ ε, para todo n ∈ N.
Prueba: (1) ⇔ (2) : basta con negar la definición de continuidad uniforme.
(2) ⇒ (3) : al tomar δ = 1/n para cada n ∈ N, a partir de (2) obtenemos
sucesiones (xn )n y (yn )n en A con |xn − yn | < 1/n, y |f (xn ) − f (yn )| > ε.
(3) ⇒ (1) : supongamos por contradicción que f : A ⊆ R → R es uniformemente. Para el ε > 0 dado por (3), existe δ > 0 que satisface la
Definición 3.2 de continuidad uniforme. Como lim xn − yn = 0 existe N ∈ N
tal que |xn − yn | < δ para todo n ≥ N , y por ser f uniformemente continua,
|f (xn ) − f (yn )| < ε en clara contradicción con (3).
Ejemplo 3.4. Retomemos la función f : ]0, ∞[→ R dada por f (x) = 1/x y
consideremos las sucesiones dadas por
1
1
y
yn = ,
xn =
n+1
n
en ]0, ∞[. En este caso
xn − yn =
1
−1
1
− =
n+1 n
n(n + 1)
que tiende a 0 cuando n tiende a infinito, pero
f (xn ) − f (yn ) = n + 1 − n = 1,
para todo n ∈ N.
Teorema 3.5. Sea f : [a, b] → R una función continua. Entonces f es
uniformemente continua en [a, b].
Prueba: Supongamos por contradicción que f no es uniformemente continua en [a, b] y sean ε > 0, (xn )n y (yn )n como en (3) del Lema 3.3.
Como (xn )n ⊂ [a, b] es una sucesión acotada, el Teorema 2.18 de BolzanoWeierstrass implica que la sucesión (xn )n posee una subsucesión convergente,
digamos (xnk )k , que converge a un x ∈ A. Como
|yn k − x| ≤ |yn k − xnk | + |xnk − x|,
3 Continuidad uniforme
3.1 Continuidad uniforme
29
sabemos que (yn k )k también converge a x ∈ A. Como la función f es
continua tenemos que
lim f (xnk ) = f (x) = lim f (yn k ),
lo cual contradice la relación |f (xn ) − f (yn )| > ε para todo n ∈ N.
Ejemplo 3.6. La función f : [c, d] → R dada por f (x) = 1/x es uniformemente continua para todo 0 < c < d. De hecho,
1 1 |x − y|
|x − y|
|f (x) − f (y)| = − =
,
≤
x y
|xy|
c2
para todo x y y en [a, b]. Por lo cual basta con tomar δ(ε) = εc2 .
Más aún, el mismo razonamiento muestra que la función f : [c, ∞[→ R
dada por f (x) = 1/x es uniformemente continua para todo 0 < c.
Definición 3.7. Una función f : ]a, b[→ R posee una extensión continua
a [a, b] si existe una función continua fe : [a, b] → R tal que fe(x) = f (x),
para todo x en ]a, b[.
Ejemplos 3.8. (1) La función f :]0, 1/π] → R dada por f (x) = sen 1/x
posee muchas extensiones al intervalo [0, 1/π] pero ninguna de ellas es continua. De hecho la sucesión dada por xn = 2/(nπ) converge a 0 mientras
que la sucesión f (xn ) = nπ/2 no es convergente.
(2) La función f : ]0, 1/π] → R dada por f (x) = x sen 1/x posee como
extensión continua al intervalo [0, 1/π] a la función fe : [0, 1/π] → R que
satisface fe(0) = 0.
Teorema 3.9. Una función f : ]a, b[→ R es uniformente continua si y solo
si posee una extensión continua a [a, b].
Prueba: Si f posee una extensión continua fe : [a, b] → R, entonces fe es
uniformemente continua en [a, b] gracias al Teorema 3.5. En consecuencia,
f es uniformemente continua en ]a, b[.
Supongamos ahora que f : ]a, b[→ R es uniformente continua y veamos
la extensión a x = a. El caso x = b es similar. La idea es mostrar que
para toda sucesión (xn )n ⊂ ]a, b[ que converge a a, la sucesión (f (xn ))n es
convergente a un mismo valor.
Primero, si (xn )n ⊂ ]a, b[ converge a a entonces (xn )n es de Cauchy, y
por el Ejercicio 3.3, (f (xn ))n es de Cauchy. Por la Proposición 2.22, esta
sucesión es convergente.
Segundo, si (yn )n ⊂ ]a, b[ converge a a entonces, como (xn − yn )n converge
a 0, por la continuidad uniforme de f , la sucesión (f (xn )−f (yn ))n converge a
0 y en consecuencia, lim f (yn ) = lim f (xn ). Adelante, verifique los detalles!
Por último, sea L ∈ R el número tal que si (xn )n ⊂ ]a, b[ converge a a
entonces (f (xn ))n converge a L, y definamos la extensión fe : [a, b[→ R de
30
3 Continuidad uniforme
3.1 Continuidad uniforme
f a [a, b[ mediante fe(x) = f (x) si x ∈]a, b[ y fe(a) = L. Si (xn )n ⊂ ]a, b[
converge a a entonces (fe(xn ))n converge a L = fe(a), lo que demuestra que
fe es continua.
3.1.1. Ejercicios.
Ejercicio 3.1. Una función f : A ⊂ R → R se dice ser de Lipschitz si
existe una constante C > 0 tal que
|f (x) − f (y)| ≤ C|x − y|,
para todo x, y ∈ A.
Si 0 < C < 1 decimos que f es una contracción.
Muestre que toda función Lipschitz es uniformemente continua.
Ejercicio 3.2. Considere la función f : [0, 1] → R dada por f (x) =
Muestre que f es uniformemente continua pero que no es Lipschitz.
√
x.
Ejercicio 3.3. Muestre que si f : A ⊆ R → R es una función uniformemente continua y si (xn )n es una sucesión de Cauchy en A, entonces
(f (xn ))n es una sucesión de Cauchy en R.
Ejercicio 3.4. Muestre que la función f : [c, ∞[→ R dada por f (x) = 1/x2
es uniformemente continua para todo 0 < c, pero que la función g : ]0, ∞[→
R no es uniformemente continua.
Ejercicio 3.5. Muestre que la función f : [0, ∞[→ R dada por f (x) = x2
no es uniformemente continua.
Ejercicio 3.6. Muestre que la función f : ]0, ∞[→ R dada por f (x) =
sen 1/x no es uniformemente continua.
Ejercicio 3.7. Muestre que la función f : R → R dada por f (x) = 1/(1+x2 )
es uniformemente continua.
Ejercicio 3.8. Muestre que la suma de funciones uniformemente continuas
es uniformemente continua.
¿Qué podemos decir sobre el producto de funciones uniformemente continuas?
Sugerencia: considere f (x) = x y g(x) = sen x.
Ejercicio 3.9. Muestre que la composición de funciones uniformemente
continuas es uniformemente continua.
Ejercicio 3.10. Sea f : A ∪ B ⊂ R → R una función tal que ambas f |A :
A → R y f |B : B → R son uniformemente continuas. Muestre que f es
uniformemente continua A.
Ejercicio 3.11. Sea f : A ⊂ R → R una función uniformemente continua
con A un subconjunto acotado. Muestre que f es acotada en A.
Ejercicio 3.12. Sea f : A ⊂ R → R una función uniformemente continua
tal que f (x) ≥ c > 0 para todo x ∈ A. Muestre que 1/f es uniformemente
continua en A.
3 Continuidad uniforme
3.1 Continuidad uniforme
31
Ejercicio 3.13. Sea f : [0, ∞[→ R una función continua la cual es uniformemente continua en [c, ∞[ para algún c > 0. Muestre que f : [0, ∞[→ R
es uniformemente continua.
Ejercicio 3.14. Una función f : R → R se dice ser periódica si existe una
constante p > 0 tal que f (x + p) = f (x), para todo x ∈ R.
Muestre que toda función periódica y continua es acotada y uniformemente continua.
Ejercicio 3.15. Considere la función f : R \ {0} → R dada por f (x) =
sen x/x. Muestre que f es uniformemente continua.
Sugerencia: encuentre una extensión continua a todo R.
32
4. La integral de Riemann
4.1. Motivación. Consideremos el problema de determinar el área encerrada por curvas continuas en el plano.
La primera restricción que nos imponemos es que la región en cuestión
se pueda encerrar por un cı́rculo lo suficientemente grande, es decir que la
región sea acotada.
Para iniciar el ataque del problema suponemos:
(1) que el área de una curva es cero (dado que no tiene ancho);
(2) que el área de una región compuesta por dos regiones disjuntas corresponde a la suma de las áreas de las dos regiones que la componen;
(3) que el área de una región es invariante bajo traslaciones, reflecciones
y rotaciones de esta región en el plano; y
(4) que a regiones más grandes les corresponden áreas mayores.
Con estos principios en mano, podemos descomponer casi cualquier región
acotada, en un conjunto finito de regiones más sencillas que posiblemente
comparten tan solo una curva en su frontera, como en la figura a la izquierda.
f
a
b
Intercambiando el valor de x y de y de ser necesario, y haciendo reflexiones
verticales y horizontales, el área de cada región se reduce al cálculo del área
A(f, [a, b]) encerrada entre el gráfico de una función continua y positiva
f : [a, b] → R y el eje horizontal, sobre un intervalo cerrado y acotado [a, b]
de la recta real, que llamaremos compacto, como en la figura de la derecha.
Veamos ahora la idea intuitiva para el cálculo de áreas conocida como
sumas de Riemann. Para calcular el área bajo el gráfico de f : [a, b] → R,
dividimos el intervalo en una cantidad finita de subintervalos
[a0 = a, a1 ], [a1 , a2 ], . . . , [ai , ai+1 ], . . . , [an−1 , an = b].
Como la función f es continua y el intervalo [a, b] es compacto, en cada
subintervalo [ai , ai+1 ] la función f alcanza un mı́nimo mi y un máximo Mi .
De este modo, el área de la región está acotada entre las sumas “inferior” y
“superior” correspondientes a dicha subdivisión:
n−1
X
n−1
X
i=0
i=0
(ai+1 − ai )mi ≤ A(f, [a, b]) ≤
(ai+1 − ai )Mi .
4 La integral de Riemann
4.2 Integral definida
33
Mi
mi
a
ai ai+1
b
El siguiente paso es considerar los conjuntos de “sumas superiores” y
de “sumas inferiores”. Ninguno de estos dos conjuntos es vacı́o, más aún,
podemos considerar como cotas los elementos
(b − a) max{f (x) : x ∈ [a, b]}
(b − a) min{f (x) : x ∈ [a, b]}.
y
El conjunto de sumas superiores posee un ı́nfimo (por ser acotado inferiormente por cualquier suma inferior) y el conjunto de sumas inferiores posee
un supremo (por ser acotado superiormente por cualquier suma superior).
Si ambos números (supremo e ı́nfimo) coinciden, hemos encontrado el valor
del área de la región.
Nuestro objetivo en este capı́tulo es formalizar gran parte de estas ideas
intuitivas. Si bien la idea presentada anteriormente está ı́ntimamente relacionada con la forma usual de presentar la integral de Riemann, es decir, mediante sumas superiores e inferiores, nosotros vamos a estudiar un
desarrollo más general, usualmente relacionado con la llamada integral de
Riemann-Stieltjes. En nuestro desarrollo usaremos sumas de Riemann en un
sentido más general y dejaremos para la Sección 4.3 la relación de nuestro
tratamiento con el tratamiento usual mediante sumas superiores e inferiores.
4.2. Integral definida. En toda esta sección restringimos nuestro estudio
a funciones f reales y acotadas. De este modo, sobre cualquier intervalo
∅=
6 J ⊂ R tiene sentido considerar ambos el supremo y el ı́nfimo de f sobre
J, sup{f (x) : x ∈ J} e inf{f (x) : x ∈ J}.
El primer concepto que presentamos es el de partición de un intervalo
compacto, y como dos particiones pueden relacionarse entre sı́ mediante la
relación “más fina” o “refinamiento”.
Definición 4.1. Para un intervalo compacto [a, b] una partición P es un
conjunto finito de subintervalos de la forma
P = {[a = a0 , a1 ], [a1 , a2 ], . . . , [an−1 , an = b]},
con a0 = a ≤ a1 ≤ a2 ≤ · · · ≤ an = b.
Nótese como una partición P brinda una colección finita de puntos {a0 ≤
a1 ≤ a2 ≤ · · · ≤ an } de modo que
[a, b] =
n−1
[
[ai , ai+1 ].
i=0
34
4 La integral de Riemann 4.2 Integral definida
De este modo, es usual identificar la partición P con la colección de puntos
extremos de cada subintervalo, P = {a0 = a ≤ a1 ≤ a2 ≤ · · · ≤ an = b}.
Definición 4.2. Dado un intervalo compacto [a, b], una partición P es más
fina que una partición Q (ó P es un refinamiento de Q) si cada subintervalo
de Q es una unión finita de subintervalos de P .
Observamos que si P es más fina que Q se tiene que P posee más subintervalos de [a, b] que Q y además, si identificamos cada partición con el
conjunto finito de los puntos extremos de los subintervalos que la forman,
se tiene que P es más fina que Q siempre que Q ⊆ P .
Nota. Dadas dos particiones de un mismo intervalo no es necesario que
ninguna de ellas sea más fina que la otra, pero si es cierto que se puede
construir una partición más fina que ambas simplemente al considerar la
unión de todos los puntos extremos de los intervalos que las forman.
♦
Definición 4.3. Para una función f : [a, b] → R y una partición P = {a0 ≤
a1 ≤ a2 ≤ · · · ≤ an } de [a, b], se define una suma de Riemann de f con
respecto a P como cualquier suma de la forma
S(f, P ; ξ0 , . . . , ξn−1 ) =
n−1
X
f (ξi )(ai+1 − ai ),
i=0
donde los puntos ξi son arbitrariamente seleccionados en el intervalo [ai , ai+1 ]
para i = 0, 1, . . . , n − 1. Es usual abreviar S(f, P ) = S(f, P ; ξ0 , . . . , ξn−1 ).
Casos particulares se obtienen al considerar:
? ξi = ai lo cual produce la suma de Riemann izquierda
n−1
X
f (ai )(ai+1 − ai );
i=0
? ξi = ai+1 lo cual produce la suma de Riemann derecha
n−1
X
f (ai+1 )(ai+1 − ai );
i=0
Si además f alcanza un máximo y un mı́nimo en cada subintervalo cerrado
(por ejemplo si f es continua) podemos considerar:
? f (ξi ) = max{f (x) : ai ≤ x ≤ ai+1 } lo cual produce la suma de
Riemann superior
n−1
X
i=0
max{f (x) : ai ≤ x ≤ ai+1 }(ai+1 − ai );
4 La integral de Riemann
4.2 Integral definida
35
? f (ξi ) = min{f (x) : ai ≤ x ≤ ai+1 } lo cual produce la suma de
Riemann inferior
n−1
X
min{f (x) : ai ≤ x ≤ ai+1 }(ai+1 − ai ).
i=0
Todos los ejemplos anteriores son diferentes sumas de Riemann asociadas a
la misma función con respecto a la misma partición. Es claro que diferentes
elecciones de los puntos ξi van a producir en general, diferentes sumas de
Riemann. La idea central es que cada una de esta sumas aproxima en alguna
medida el área bajo el gráfico de la función f (siempre que f sea positiva).
Un tipo particular de partición es la llamada partición uniforme
b−a
b−a
, a2 = a + 2
, . . . , an = b ,
Pn = a0 = a, a1 = a +
n
n
en la cual cada subintervalo posee la misma longitud. La suma de Riemann
(izquierda) asociada a la partición uniforme está dada por
n−1
X b−a b−a
.
f a+i
n
n
i=0
Ejemplo 4.4. Si la función f : [a, b] → R es constante entonces es indiferente la elección del punto ξi pues para toda elección se tiene f (ξi ) = c.
Ası́
n−1
n−1
X
X
f (ξi )(ai+1 − ai ) = c
(ai+1 − ai ) = c(an − a0 ) = c(b − a),
i=0
i=0
y cualquier suma de Riemann coincide precisamente con el área bajo el
gráfico (en caso de tener c ≥ 0).
Nota. Si la función f : [a, b] → R es acotada, entonces
inf{f (x) : x ∈ [a, b]}(b − a) ≤
n−1
X
f (ξi )(ai+1 − ai )
i=0
≤ sup{f (x) : x ∈ [a, b]}(b − a).
Por lo cual el conjunto de sumas de Riemann para una función, el cual es
trivialmente no vacı́o, posee tanto un ı́nfimo como un supremo.
♦
Definición 4.5. Una función f : [a, b] → R es Riemann integrable en
[a, b] si existe un número I ∈ R tal que para todo ε > 0 existe una partición
Pε tal que
|S(f, P ; ξ0 , . . . , ξn−1 ) − I| < ε
para toda partición P = {a0 , . . . , an } más fina que Pε y toda elección de
puntos ξi ∈ [ai , ai+1 ] con i = 0, 1, . . . , n − 1. El número I se denota
Z b
I=
f (x) dx
a
36
4 La integral de Riemann 4.2 Integral definida
y se llama la integral definida de f en el intervalo [a, b] (en el sentido
de Riemann).
Nota. Es inmediato de la definición que el número I =
Además si b > a es común definir
Z b
Z a
f (x) dx,
f (x) dx := −
Rb
a
f (x) dx es único.
a
b
lo cual es fácil de justificar a partir de las sumas de Riemann. Del mismo
modo, no es difı́cil justificar que
Z a
f (x)dx = 0.
♦
a
Ejemplos 4.6. (1) Si f : [a, b] → R es constante f (x) = c, hemos mostrado
Rd
arriba que f es Riemann integrable al tomar I = a c dx = c(b − a).
(2) Sea g la función de Dirichlet en [a, b]:
0 si x es un número irracional en [a, b],
g(x) =
1 si x es un número racional en [a, b].
Observece que para cualquier partición P es posible elegir los ξi todos irracionales (aquı́ suponemos ai < ai+1 ) lo cual produce S(g, P, ξ0 , . . . , ξn ) = 0,
ó bien es posible elegir los ξi todos racionales para tener S(g, P, ξ0 , . . . , ξn ) =
b − a. De este modo es imposible hallar un número real I para el cual
|S(f, P ; ξ0 , . . . , ξn ) − I| < ε
para toda partición P = {a0 , . . . , an } más fina que Pε y toda elección de los
ξi . Por lo tanto, la función de Dirichlet no es integrable en el sentido de
Riemann.
A continuación vamos a mostrar un criterio de los llamados de Cauchy,
en este caso para concluir la integrabilidad en el sentido de Riemann de una
función. Es importante notar como la demostración del recı́proco se divide
en dos partes. Primero encontraremos un candidato para el valor deseado,
y segundo mostraremos que dicho valor es precisamente el que necesitamos.
Teorema 4.7. Criterio de Cauchy para integración de Riemann.
Sea f : [a, b] → R una función. La función f es Riemann integrable en [a, b]
si y solo si para todo ε > 0 existe una partición Pε de [a, b] de modo que
para todo par de particiones P, Q más finas que Pε se tiene
|S(f, P ) − S(f, Q)| < ε.
Prueba: Primero supongamos que f es Riemann integrable en [a, b]. Existe
I ∈ R tal que para todo ε > 0 existe una partición Pε de [a, b] de modo que
si P y Q son particiones más finas que Pε entonces
|S(f, P ) − S(f, Q)| ≤ |S(f, P ) − I| + |S(f, Q) − I| < ε/2 + ε/2 = ε.
4 La integral de Riemann
4.2 Integral definida
37
Para el recı́proco supongamos que para todo ε > 0 existe una partición
Pε de [a, b] de modo que para todo par de particiones P, Q más finas que Pε
se tiene
|S(f, P ) − S(f, Q)| < ε.
Considere ε1 = 1 y sea Q1 la correspondiente partición Q1 = Pε1 . Para
ε2 = 1/2 sea Q2 la partición que se obtiene al unir los puntos extremos de
Q1 con los de Pε2 . De este modo Q2 es más fina que Q1 y que Pε2 . En forma
sucesiva, para εn = 1/n sea Qn la partición que se obtiene al unir los puntos
extremos de Qn−1 con Pεn . De este modo Qn es más fina que Qn−1 y que
Pεn . Ası́, para cada n < m se tiene que
|S(f, Qn ) − S(f, Qm )| < 1/n
dado que ambas Qn y Qm son más finas que Pεn (independientemente de la
forma de elegir los puntos intermedios ξi en cada subintervalo).
Para cada Qn elija los diferentes ξi como los extremos izquierdos de cada
subintervalo y defina Sn := S(f, Qn ; {ξi }). Lo anterior demuestra que la
sucesión de los Sn es una sucesión de Cauchy, por lo cual posee un lı́mite I
en R.
Ahora sea ε > 0 y sea n ∈ N el primer número natural que satisface
1/n < ε. Sea Qε la partición que se obtiene al unir los puntos extremos de
Pε y Qn . Si P es una partición más fina que Qε entonces
|S(f, P )−I| ≤ |S(f, P )−S(f, Qε )|+|S(f, Qε )−Sn |+|Sn −I| < ε+2/n < 3ε
pues ambas P y Qε son más finas que Qε y Qε es más fina que Qn . Esto
concluye el resultado.
Lema 4.8. Sea f una función acotada en [a, b] y sea Q = {a0 , a1 , . . . , an }
una partición de [a, b] más fina que una partición dada P = {c0 , c1 , . . . , cm }
de [a, b]. Entonces
|S(f, Q; {ξj }) − S(f, P ; {ηk })| ≤
m−1
X
(Mi − mi )(ci+1 − ci )
i=0
para cualesquiera puntos intermedios {ξj } de Q y {ηk } de P , donde para
todo i = 0, 1, . . . , m − 1 se definen Mi = sup{f (x) : x ∈ [ci , ci+1 ]} y mi =
inf{f (x) : x ∈ [ci , ci+1 ]}.
Prueba: Como Q es más fina que P se tiene que ci = aj ≤ aj+1 ≤ aj+2 ≤
· · · ≤ aj+l = ci+1 para algunos j, l. Ası́, los ξj , . . . , ξj+l−1 pertenecen al
38
4 La integral de Riemann 4.2 Integral definida
intervalo [ci , ci+1 ]. De este modo, para ηi ∈ [ci , ci+1 ] se tiene que
l−1
X
f (ηi )(ci+1 − ci ) −
f (ξj+r )(aj+r+1 − aj+r )
r=0
l−1
X
=
f (ηi )(aj+r+1 − aj+r ) − f (ξj+r )(aj+r+1 − aj+r )
r=0
l−1
X
= (f (ηi ) − f (ξj+r ))(aj+r+1 − aj+r )
r=0
≤ (Mi − mi )
l−1
X
(aj+r+1 − aj+r ) = (Mi − mi )(ci+1 − ci ).
r=0
Por lo tanto,
|S(f, P ; η0 , . . . , ηm ) − S(f, Q; ξ0 , . . . , ξn )| ≤
m−1
X
(Mi − mi )(ci+1 − ci )
i=0
lo cual muestra el resultado.
Teorema 4.9. Criterio de Riemann. Una función acotada f : [a, b] → R
es Riemann integrable si y solo si para todo ε > 0 existe una partición Pε
de [a, b] tal que si P = {a0 , a1 , . . . , an } es un refinamiento de Pε entonces
n−1
X
(Mi − mi )(ai+1 − ai ) < ε
(1)
i=0
donde Mi = sup{f (x) : x ∈ [ai , ai+1 ]} y mi = inf{f (x) : x ∈ [ai , ai+1 ]} para
todo i = 0, 1, . . . , n − 1.
Mi
mi
ai−1
ai
ai+1
ai+2
Prueba: Si f es Riemann integrable y si ε > 0 sea Pε una partición de [a, b]
que satisface la Definición 4.5. Sea P = {a0 , a, . . . , an } un refinamiento de
Pε y elija zi , yi ∈ [ai , ai+1 ] de modo que Mi − ε < f (yi ) y f (zi ) < mi + ε. De
este modo Mi − mi < f (yi ) − f (zi ) + 2ε para todo i = 0, 1, . . . , n − 1 y ası́
n−1
X
n−1
X
i=0
i=0
(Mi −mi )(ai+1 −a1 ) ≤
f (yi )(ai+1 −ai )−
n−1
X
i=0
f (zi )(ai+1 −a1 )+2ε(b−a).
4 La integral de Riemann
4.2 Integral definida
39
En el lado derecho de la desigualdad tenemos dos sumas de Riemann correspondientes a la partición P que es más fina que Pε . De este modo la
diferencia entre ellas no puede ser mayor a 2ε por lo cual
n−1
X
(Mi − mi )(ai+1 − a1 ) < 2ε(1 + b − a),
i=0
y esto completa la primera parte de la demostración.
Para el recı́proco, suponga que ε > 0 y sea Pε = {c0 , c1 , . . . , cm } una
partición de [a, b] que satisface (1). En particular Pε es más fina que Pε por
lo cual la hipótesis implica que
n−1
X
(Mi − mi )(ci+1 − c1 ) < ε,
i=0
donde Mi = sup{f (x) : x ∈ [ci , ci+1 ]} y mi = inf{f (x) : x ∈ [ci , ci+1 ]}, para
todo i = 0, 1, . . . , m − 1.
Si P y Q son particiones de [a, b] más finas que Pε entonces por el Lema 4.8
se tiene que
|S(f, P ) − S(f, Q)| ≤ |S(f, P ) − S(f, Pε )| + |S(f, Pε ) − S(f, Q)|
≤2
m−1
X
(Mi − mi )(ci+1 − ci ) < 2ε.
i=0
El resultado se obtiene a partir del Criterio de Cauchy.
Corolario 4.10. Si f : [a, b] → R es monótona en [a, b] entonces f es
Riemann integrable en [a, b].
Prueba: Sin pérdida de generalidad suponemos que f es creciente en [a, b],
de este modo mi = f (ai ) y Mi = f (ai+1 ) para todo subintervalo [ai , ai+1 ]
de [a, b]. Si ε > 0 y elegimos los ai de modo que ai+1 − ai < ε tenemos que
n−1
X
n−1
X
i=0
i=0
(Mi − mi )(ai+1 − ai ) < ε
de lo cual se concluye el resultado.
f (ai+1 ) − f (ai ) = ε(f (b) − f (a))
Teorema 4.11. Si f : [a, b] → R es continua en [a, b] entonces f es Riemann
integrable en [a, b].
Prueba: Como f es continua en un intervalo cerrado y acotado, f es uniformemente continua, ası́ para todo ε > 0 existe un δ > 0 tal que si |x−y| < δ
para x, y ∈ [a, b] se tiene |f (x) − f (y)| < ε. Sea Pε una partición de [a, b] de
modo tal que cada subintervalo de Pε tiene longitud menor que δ. Entonces
40
4 La integral de Riemann 4.2 Integral definida
si P = {a0 , . . . , an } es un refinamiento de Pε se tiene que Mi − mi < ε para
cada i y ası́
n−1
X
(Mi − mi )(ai+1 − ai ) < ε(b − a),
i=0
por lo cual el resultado se obtiene a partir del Critero de Riemann.
Hasta ahora, hemos demostrado que la clase de funciones que son Riemann integrables sobre un intervalo compacto es bastante amplia, en particular, contiene todas las funciones monótonas y todas las funciones continuas. Por otra parte, la función de Dirichlet de el Ejemplo 4.6 nos dice
que una función con una cantidad contable (tantas como elementos en N) de
discontinuidades no es necesariamente Riemann integrable. A continuación
veremos como una función con una cantidad finita de discontinuidades es
Riemann integrable sobre un intervalo compacto.
Lema 4.12. Sea f : [a, b] → R una función Riemann integrable en ambos
intervalos [a, c] y [c, b] para algún c ∈]a, b[. Entonces f es Riemann integrable
en [a, b], además
Z b
Z c
Z b
f (x) dx =
f (x) dx +
f (x) dx.
(2)
a
a
c
Prueba: Sea ε > 0, por hipótesis existen particiones P1 de [a, c] y P2 de
[c, b] que satisfacen para ε/2 la Definición 4.5, en sus respectivos intervalos.
Evidentemente, Pε = P1 ∪ P2 es una partición de [a, b]. Si P es una partición
de [a, b] más fina que Pε entonces alguno de los puntos de P es precisamente
c. De este modo, los puntos en P entre a y c inclusive forman una partición
Q1 de [a, c] más fina que P1 y similarmente, los puntos en P entre c y b
inclusive forman una partición Q2 de [c, b] más fina que P2 . De este modo
Z c
Z b
S(f, P )[a,b] −
f
(x)
dx
−
f
(x)
dx
a
c
Z c
Z b
= S(f, Q1 )[a,c] −
f (x) dx + S(f, Q2 )[c,b] −
f (x) dx
a
c
Z c
Z b
f (x) dx < ε/2 + ε/2,
≤ S(f, Q1 )[a,c] −
f (x) dx + S(f, Q2 )[c,b] −
a
c
de lo cual se obtiene el resultado.
Compare el resultado anterior con el Ejercicio 4.5.
Lema 4.13. Sea f : [a, b] → R una función continua en ]a, b] con limx→a+ =
A ∈ R no necesariamente igual a f (a). Entonces f es Riemann integrable
en [a, b].
4 La integral de Riemann
4.2 Integral definida
41
Prueba: Sea ε > 0. Por hipótesis existe δ > 0 tal que si 0 < x − a ≤ δ
entonces |f (x) − A| < ε. Ası́ para todo x ∈ [a, a + δ] :
min{−ε + A, f (a)} ≤ f (x) ≤ max{ε + A, f (a)}.
Sea ρ = min{δ, ε, b − a}. Como f es continua en [a + ρ, b] se sigue que f es
Riemann integrable en [a + ρ, b] y ası́ existe una partición Pε0 de [a + ρ, b]
que satisface el criterio de Riemann en ese subintervalo.
Sea {a, a + ρ} la partición trivial de [a, a + ρ]. Si P = {a0 , . . . , an } es una
partición de [a, a + ρ] se tiene
n−1
X
(Mi − mi )(ai+1 − ai ) ≤ ρ max{2ε, f (a) − A + ε, A − f (a) + ε},
i=0
donde Mi y mi están definidos como en el enunciado del Criterio de Riemann.
Por último, si tomamos Pε como la partición del intervalo [a, b] dada por
Pε = {a, a + ρ} ∪ Pε0 , obtenemos para cualquier partición P de [a, b] más fina
que Pε la relación
n−1
X
(Mi − mi )(ai+1 − ai ) ≤ ε max{2ε, f (a) − A + ε, A − f (a) + ε} + 1 .
i=0
Del Criterio de Riemann, f es integrable en [a, b].
En forma análoga se puede demostrar el siguiente lema.
Lema 4.14. Sea f : [a, b] → R una función continua en [a, b[ con limx→b− =
B ∈ R no necesariamente igual a f (b). Entonces f es Riemann integrable
en [a, b].
Proposición 4.15. Sea f : [a, b] → R una función con un número finito de
discontinuidades en [a, b]. Entonces f es Riemann integrable en [a, b].
Prueba: Como f tiene solo una cantidad finita de discontinuidades en [a, b]
es posible descomponer [a, b] en una unión finita de subintervalos de modo tal
que en cada uno de ellos se satisfacen las hipótesis de uno de los Lemas 4.13
ó 4.14. El resultado se obtiene gracias al Lema 4.12.
En el siguiente ejemplo vemos que existen funciones con una cantidad
contable de discontinuidades y aún ası́ son Riemann integrables.
Ejemplo 4.16. Defina en [0, 1] la función
x si x = 1/n con n ∈ N,
f (x) =
0 en cualquier otro caso.
Es posible mostrar que la función f es discontinua en cada punto 1/n, por
lo cual posee una cantidad contable de discontinuidades.
Vamos a mostrar
R1
que f es Riemann integrable en [0, 1] y que 0 f (x) dx = 0.
42
4 La integral de Riemann 4.2 Integral definida
Para ε > 0 existe N ∈ N tal que 1 < N ε. Si P = {a0 , . . . , al } es una
partición de [0, 1/N ] sabemos que
0 ≤ S(f, P ; ξ0 , . . . , ξn ) =
l−1
X
f (ξi )(ai+1 − ai ) ≤ 1/N 2 < ε2 .
i=0
Como f solo posee una cantidad finita de discontinuidades en [1/N, 1]
se tiene que f Res Riemann integrable en dicho intervalo. Más aún, no es
1
difı́cil ver que 1/N f (x) dx = 0 dado que f es constante 0 en cada intervalo
]1/(m + 1), 1/m[ para todo m < N . En particular, existe una partición Pε0
de [1/N, 1] tal que
0 ≤ S(f, Q) < ε,
para cualquier partición Q de [1/N, 1] más fina que Pε0 .
Al tomar la parición Pε = {0, 1/N }∪Pε0 de [0, 1] obtenemos para cualquier
partición P de [0, 1] más fina que Pε la relación
0 ≤ S(f, P ) < ε2 + ε,
R1
y ası́ f es Riemann integrable en [0, 1] con 0 f (x) dx = 0.
El siguiente resultado nos será particularmente útil cuando calculemos
integrales propias más adelante.
Teorema 4.17. Linealidad de la integral. Sean f y g dos funciones
Riemann integrables en [a, b] entonces f + Cg es Riemann integrable en
[a, b] para toda constante C ∈ R y
Z b
Z b
Z b
f (x) + Cg(x) dx =
f (x) dx + C
g(x) dx.
a
a
a
Prueba: Sea ε > 0 y sean Pε y Qε particiones de [a, b] que satisfacen la
Definición 4.5 para f y g respectivamente. Sin pérdida de generalidad, al
tomar Pε ∪ Qε , podemos asumir Pε = Qε .
Notamos que
S(f + Cg, P ) =
n−1
X
(f + Cg)(ξi )(ai+1 − ai )
i=0
=
n−1
X
f (ξi )(ai+1 − ai ) + C
i=0
n−1
X
g(ξi )(ai+1 − ai ) = S(f, P ) + CS(g, P ),
i=0
para toda partición P . Por lo cual
Z b
Z b
S(f + Cg, P ) −
f (x) dx − C
g(x) dx
a
a
Z b
Z b
≤ S(f, P ) −
f (x) dx + |C|S(g, P ) −
g(x) dx,
a
de donde se obtiene el resultado.
a
4 La integral de Riemann
4.2 Integral definida
43
A continuación vamos a mostrar un teorema referente a la integrabilidad
de la composición de funciones. Como recompensa vamos a obtener un par
de corolarios que nos permiten ampliar la cantidad de funciones Riemann
integrables que conocemos.
Teorema 4.18. Sea f : [a, b] → R una función Riemann integrable con
f ([a, b]) ⊆ [c, d] y sea g : [c, d] → R una función continua. Entonces g ◦ f es
Riemann integrable en [a, b].
Prueba: Sea ε > 0. Como g es continua en [c, d] se tiene que g es uniformemente continua y ası́ existe δ > 0 tal que si |x − y| < δ entonces
|g(x) − g(y)| < ε para todo x, y ∈ [c, d]. Sea ρ := min{δ, ε}. Por el Criterio
de Riemann, existe una partición Pρ tal que si P = {a0 , . . . , an } es una
partición más fina que Pρ entonces,
n−1
X
(Mi − mi )(ai+1 − ai ) < ρ2 ,
i=0
donde Mi = sup{f (x) : x ∈ [ai , ai+1 ]} y mi = inf{f (x) : x ∈ [ai , ai+1 ]} para
todo i = 0, 1, . . . , n − 1.
Considere los conjuntos disjuntos de ı́ndices A y B de modo que A ∪ B =
{0, . . . n − 1} con k ∈ A si Mk − mk < ρ y k ∈ B si Mk − mk ≥ ρ.
Si x, y ∈ [ak , ak+1 ] para k ∈ A entonces |f (x) − f (y)| < ρ ≤ δ y ası́
fk = sup{g ◦ f (x) : x ∈ [ak , ak+1 ]} y
|g(f (x)) − g(f (y))| < ε. Por lo cual si M
m
fk = inf{g ◦ f (x) : x ∈ [ak , ak+1 ]} se tiene que
X
fk − m
M
fk (ak+1 − ak ) ≤ ε(b − a).
k∈A
Si x, y ∈ [ak , ak+1 ] para k ∈ B entonces ρ ≤ Mk −mk y si K := sup{|g(x)| :
x ∈ [c, d]} se tiene que
X
X
fk − m
M
fk (ak+1 − ak ) ≤ 2K
(ak+1 − ak )
k∈B
k∈B
2K X
Mk − mk )(ak+1 − ak ) < 2Kρ ≤ 2Kε,
≤
ρ
k∈B
al agregar a la última suma los ı́ndices k ∈ A. De este modo
n−1
X
fk − m
M
fk (ak+1 − ak ) ≤ (2K + b − a)ε.
k=0
El resultado se obtiene a partir del Criterio de Riemann para la función g ◦ f
y la partición Pρ .
Corolario 4.19. Sea f : [a, b] → R una función Riemann integrable.
(1) La función |f | es Riemann integrable en [a, b].
(2) La función f n es Riemann integrable en [a, b] para todo n ∈ N.
44
4 La integral de Riemann
4.3 Sumas de Darboux
(3) Si existe ε > 0 tal que f (x) ≥ ε para todo x ∈ [a, b] entonces 1/f es
Riemann integrable en [a, b].
Corolario 4.20. Sean f y g funciones Riemann integrables en [a, b]. Entonces f g es Riemann integrable en [a, b].
Prueba: Basta considerar f g = (f + g)2 − f 2 − g 2 /2.
4.3. Sumas de Darboux. En esta sección relacionamos nuestro tratamiento de la integral de Riemann, con el tratamiento mediante sumas superiores
e inferiores, tambien conocidas como sumas de Darboux. Al igual que antes,
en esta sección nuestras funciones son acotadas.
Definición 4.21. Para una partición P = {a0 , . . . , an } del intervalo [a, b]
definimos la suma superior de Darboux U (f, P ) de f con respecto a P
y la suma inferior de Darboux L(f, P ) de f con respecto a P mediante:
U (f, P ) :=
n−1
X
Mi (ai+1 − ai )
y
L(f, P ) :=
i=0
n−1
X
mi (ai+1 − ai ),
i=0
donde Mi = sup{f (x) : x ∈ [ai , ai+1 ]} y mi = inf{f (x) : x ∈ [ai , ai+1 ]} para
todo i = 0, 1, . . . , n − 1.
Observe que estas cantidades ya las habiamos estudiado en el Teorema 4.9
Nota. Dado que mi ≤ Mi para cada i = 0, 1, . . . , n − 1, es inmediato que
L(f, P ) ≤ U (f, P ).
♦
Lema 4.22. Si Q es un refinamiento de P entonces, L(f, P ) ≤ L(f, Q) y
U (f, Q) ≤ U (f, P ).
Prueba: Basta con observar que
sup{f (x) : x ∈ [bj , ai+1 ]}(ai+1 − bj ) + sup{f (x) : x ∈ [ai , bj ]}(bj − ai )
≤ Mi (ai+1 − bj ) + Mi (bj − ai ) = Mi (ai+1 − ai ),
e
inf{f (x) : x ∈ [bj , ai+1 ]}(ai+1 − bj ) + sup{f (x) : x ∈ [ai , bj ]}(bj − ai )
≥ mi (ai+1 − bj ) + mi (bj − ai ) = mi (ai+1 − ai ),
para todo ai < bj < ai+1 .
Corolario 4.23. Si P y Q son particiones cualesquiera del mismo intervalo
entonces, L(f, P ) ≤ U (f, Q).
Prueba: Basta con observar que
L(f, P ) ≤ L(f, P ∪ Q) ≤ U (f, P ∪ Q) ≤ U (f, Q),
para obtener el resultado
4 La integral de Riemann
4.3 Sumas de Darboux
45
Como un corolario del resultado anterior observamos que para cualquier
partición P de [a, b],
L(f, {a, b}) ≤ L(f, P ) ≤ U (f, P ) ≤ U (f, {a, b}).
En particular la siguiente definición tiene perfecto sentido.
Definición 4.24. Definimos la integral inferior (de Darboux) L(f ) de f
en [a, b] y la integral superior (de Darboux) U (f ) de f en [a, b] mediante
L(f ) := sup{L(f, P ) : P es una partición de [a, b]},
U (f ) := inf{U (f, P ) : P es una partición de [a, b]}.
Nota. Es inmediato que L(f ) ≤ U (f ).
♦
Definición 4.25. Definimos una función f como integrable en el sentido
de Darboux en [a, b] si L(f ) = U (f ). A dicho número le llamaremos la
integral de f en [a, b], en el sentido de Darboux.
Teorema 4.26. Otro Criterio de Riemann. Una función f es integrable
en el sentido de Darboux en [a, b] si y solo si para cada ε > 0 existe una
partición Pε de [a, b] tal que
U (f, P ) − L(f, P ) < ε,
para toda partición P de [a, b], más fina que Pε .
Prueba: Sea f una función Darboux integrable en [a, b] y sea ε > 0. Por
propiedades del supremo y del ı́nfimo existen particiones P y Q de [a, b] tales
que L(f ) − ε/2 < L(f, P ) y U (f, Q) < U (f ) + ε/2. Al tomar Pε = P ∪ Q,
obtenemos que
U (f, Pε ) − L(f, Pε ) ≤ U (f, Q) − L(f, P ) < U (f ) − L(f ) + ε = ε.
La primera parte del resultado se obtiene de la desigualdad
U (f, P 0 ) − L(f, P 0 ) ≤ U (f, Pε ) − L(f, Pε ),
para cualquier partición P 0 más fina que Pε .
Para el recı́proco, observamos que
U (f ) − L(f ) ≤ U (f, P ) − L(f, P ) < ε,
para todo ε > 0. Lo cual es suficiente para concluir el resultado.
Es posible demostrar para funciones Darboux integrables (con mayor o
menor esfuerzo) todos los resultados que hemos mostrado anteriormente
para funciones Riemann integrables. Nos concentramos ahora en mostrar
que ambas definiciones coinciden.
El siguiente resultado se basa en la sencilla observación, mi ≤ f (ξi ) ≤ Mi ,
para todo ξi ∈ [ai , ai+1 ].
46
4 La integral de Riemann
4.3 Sumas de Darboux
Lema 4.27. Para toda partición P de [a, b], se tiene que
L(f, P ) ≤ S(f, P ) ≤ U (f, P ).
Corolario 4.28. Una función f es Riemann integrable en el sentido de
la Definición 4.5 si y solo si es Darboux integrable en el sentido de la
Definición 4.24. Además
Z b
f (x) dx = L(f ) = U (f ).
a
Prueba: Primero observamos que una función f es Riemann integrable si y
solo si es Darboux integrable, gracias a los Teoremas 4.9 y 4.26.
Segundo, sea ε > 0 y sea Pε una partición de [a, b], dada por el Teorema 4.26. En particular, para cualquier partición P más fina que Pε ,
L(f ) − ε/2 < L(f, Pε ) ≤ L(f, P )
y U (f, P ) ≤ U (f, Pε ) < U (f ) + ε/2.
Por el Lema 4.27, como L(f, P ) ≤ L(f ) = U (f ) ≤ U (f, P ),
|S(f, P ) − L(f )| ≤ U (f, P ) − L(f, P ) < ε.
Rb
Por lo cual, L(f ) = a f = U (f ).
Presentamos ahora una tercera caracterización para la integral de Riemann, la cual es una generalización de los Teoremas 4.9 y 4.26.
Definición 4.29. Para una partición P = {a0 , . . . , an } de [a, b] definimos
la norma ||P || de P mediante
||P || := max{a1 − a0 , a2 − a1 , . . . , an − an−1 }.
Nota. Observe que la norma de una partición es simplemente el tamaño del
mayor de sus subintervalos.
♦
Teorema 4.30. Una función f es Darboux integrable (o bien Riemann integrable) en [a, b], si y solo si para todo ε > 0 existe un δ > 0 para el cual,
si P es cualquier partición de [a, b] con ||P || < δ entonces
U (f, P ) − L(f, P ) < ε.
Prueba: Sea ε > 0 y supongamos que f es Darboux (o Riemann) integrable
en [a, b]. Sea Q = {a = a0 , . . . , an = b} una partición de [a, b] tal que
U (f, Q)−L(f, Q) < ε/2. Como f es acotada, existe C ∈ R tal que |f (x)| ≤ C
para todo x en [a, b].
Consideremos ahora una partición arbitraria P = {a = b0 , . . . , bm = b} de
[a, b] y tratemos de identificar el δ > 0 que satisface el resultado para toda
partición P con ||P || < δ.
4 La integral de Riemann
4.3 Sumas de Darboux
47
Si existe un único elemento aj en P ∪ Q que no está en P , digamos
bi < aj < bi+1 , entonces tenemos con m[c,d] = inf{f (x) : x ∈ [c, d]} que
L(f, P ∪ Q) − L(f, P )
= m[bi ,aj ] (aj − bi ) + m[aj ,bi+1 ] (bi+1 − aj ) − m[bi ,bi+1 ] (bi+1 − bi )
≤ (C − (−C))(bi+1 − bi ) ≤ 2C||P ||.
Dado que la máxima cantidad de elementos en P ∪Q que no estén en P es
n − 1 (la cantidad de elementos en Q sin considerar ni a ni b), el argumento
anterior muestra que
L(f, P ∪ Q) − L(f, P ) ≤ 2(n − 1)C||P || < 2(n − 1)Cδ.
Como L(f, Q) ≤ L(f, P ∪ Q), sabemos que
L(f, Q) − L(f, P ) < 2(n − 1)Cδ.
Un argumento análogo muestra que
U (f, P ) − L(f, Q) < 2(n − 1)Cδ,
y en consecuencia
ε
+ 4(n − 1)Cδ.
2
Al tomar δ = ε/(8(n − 1)C) se concluye la primera parte del resultado.
Para el recı́proco basta con notar que, gracias al Teorema 4.26, es suficiente con tomar una partición uniforme Pε de [a, b] con ||Pε || < δ.
U (f, P ) − L(f, P ) < U (f, Q) − L(f, Q) + 4(n − 1)Cδ <
Para terminar esta sección presentamos un resultado que se basa tan solo
en la norma de la partición y que generaliza la Definición 4.5.
Corolario 4.31. Criterio de Darboux. Una función f es Riemann integrable (o bien Darboux integrable) en [a, b], si y solo si existe J ∈ R tal que
para todo ε > 0 existe un δ > 0 para el cual si P es cualquier partición de
[a, b] con ||P || < δ entonces
S(f, P ) − J < ε,
para cualquier suma de Riemann S(f, P ) asociada a P .
Rb
Además J = a f (x) dx.
Prueba: Dadas las hipótesis, el candidato ideal es J = I = L(f ) = U (f ).
Veamos que este número satisface las condiciones deseadas.
Sea ε > 0 y sea δ > 0 dado por el Teorema 4.30. Para cualquier partición
P de [a, b] con ||P || < δ, como ambos S(f, P ) y L(f ) = U (f ) = I = J están
entre L(f, P ) y U (f, P ), para cualquier suma de Riemann S(f, P ) asociada
a P , sabemos que
|S(f, P ) − J| < ε,
como se deseaba.
Para el recı́proco basta con notar que, gracias al Teorema 4.9, es suficiente
con tomar una partición uniforme Pε de [a, b] con ||Pε || < δ.
48
4 La integral de Riemann
4.3 Sumas de Darboux
4.3.1. Ejercicios.
Ejercicio 4.1. Demuestre que si P y Q son particiones del mismo intervalo
[a, b] entonces P ∪ Q es una partición de [a, b] más fina que P y que Q.
Ejercicio 4.2. Defina en [0, 1] la función h mediante
1 si x = 0,
1/n si x = m/n con (m, n) = 1,
h(x) =
0 en cual quier otro caso.
Esta función se conoce como la función de Thomae. Es posible mostrar
que es discontinua en cada punto racional y discontinua en cada punto irracional, por lo cual posee una cantidad contable
R 1 de discontinuidades. Muestre
que h es Riemann integrable en [0, 1] y que 0 h(x) dx = 0.
Ejercicio 4.3. Sea f la función en [0, 1] definida mediante f (x) = 0 si
x 6∈ Q y f (x) = x si x ∈ Q. Muestre que f no es Riemann integrable en
[0, 1].
Ejercicio 4.4. Sea f una función Riemann integrable en [a, b] y sea g una
función que coincide con f en [a, b] excepto por una cantidad finita de puntos.
Rb
Rb
Muestre que g es Riemann integrable en [a, b] y que a f (x) dx = a g(x) dx.
Sugerencia: considere f − g.
Dé un ejemplo para mostrar que este resultado puede no ser cierto si las
funciones son diferentes en una cantidad contable de puntos.
Ejercicio 4.5. Sea f : [a, b] → R una función Riemann integrable en [a, b].
Muestre que f es Riemann integrable en ambos intervalos [a, c] y [c, b] para
todo c ∈]a, b[ y que (2) sigue válida.
Ejercicio 4.6. Muestre que si f (x) ≤ g(x) para todo x ∈ [a, b] entonces
Z b
Z b
f (x) dx ≤
g(x) dx.
a
a
Ejercicio 4.7. Sea f : [a, b] → R una función Riemann integrable. Muestre
que
Z b
Z b
f (x) dx ≤
|f (x)| dx.
a
a
Ejercicio 4.8. Sea gn : [a, b] → R una sucesión de funciones no negativas
y Riemann integrables tales que
Z b
lim
gn (x) dx = 0.
n→∞ a
Si f : [a, b] → R es una función Riemann integrable muestre que
Z b
lim
f (x)gn (x) dx = 0.
n→∞ a
4 La integral de Riemann
4.3 Sumas de Darboux
49
Concluya que para toda función f Riemann interable en [0, 1] se tiene
Z 1
lim
xn f (x) dx = 0.
n→∞ 0
Ejercicio 4.9. Sea f una función continua en el intervalo [a, b] y defina
||f ||[a,b] := sup{|f (x)| : x ∈ [a, b]}.
Muestre que si ||f ||[a,b] > 0 y p > 0 entonces para todo ε > 0 existe un
intervalo [c, d] ⊆ [a, b] (que depende de ε) tal que
Z b
p
(||f ||[a,b] − ε) (d − c) ≤
|f (x)|p dx ≤ ||f ||p[a,b] (b − a).
a
Conluya que
Z
p
|f (x)| dx
lim
p→∞
b
1/p
= ||f ||[a,b] .
a
Ejercicio 4.10. Sean f y g funciones Riemann integrables en [a, b]. Use el
hecho que (f (x) − λg(x))2 ≥ 0 para todo x ∈ [a, b] y todo λ ∈ R para mostrar
que
Z b
2 Z b
Z b
f (x)g(x) dx ≤
f 2 (x) dx
g 2 (x) dx .
a
a
a
La anterior se conoce como la desigualdad de Cauchy-Schwartz.
Concluya que
Z b
1/2 Z b
1/2 Z b
1/2
2
2
2
f (x) + g(x) dx
≤
f (x) dx
+
g (x) dx
,
a
a
a
lo cual es una versión de la desigualdad triangular.
Ejercicio 4.11. Muestre que todo polinomio es Riemann integrable en todo
intervalo compacto.
Ejercicio 4.12. Muestre que la composición de funciones Riemann integrables no es necesariamente Riemann integrable.
Sugerencia: considere la función g ◦ h donde h es la función Riemann
integrable del Ejercicio 4.2 y g es la función que vale 1 para x 6= 0 y g(0) = 0.
Ejercicio 4.13. Sea f una función acotada y Riemann integrable en [a, c]
para todo c ∈]a, b[. Muestre que f es Riemann integrable en [a, b] y que
Rb
Rc
a f (x) dx = limc→b− a f (x) dx.
Ejercicio 4.14.
(1) Muestre que la función f (x) = cos(π/x) para 0 <
x ≤ 1 y f (0) = 0 es Riemann integrable en [0, 1].
(2) Muestre que la función g(x) = sen(1/x) para x 6= 0 y f (0) = 0 es
Riemann integrable en [−1, 1].
50
4 La integral de Riemann
4.3 Sumas de Darboux
(3) Muestre que la función h(x) = x sgn(sen(1/x)) para x 6= 0 y f (0) = 0
es Riemann integrable en [−1, 1], donde sgn(0) = 0, sgn(x) = 1 si
x > 0 y sgn(x) = −1 si x < 0, es la función signo. Observe que esta
función h no es ni continua ni monotóna en ningún subintervalo de
su dominio.
Ejercicio 4.15. Sea f una función continua en [a, b] con f (x) ≥ 0 para
Rb
todo x ∈ [a, b]. Muestre que si a f (x) dx = 0 entonces f (x) = 0 para todo
x ∈ [a, b].
Ejercicio 4.16. Sean f y g funciones continuas tales que
Z b
Z b
f (x) dx =
g(x) dx.
a
a
Muestre que existe c ∈ [a, b] tal que f (c) = g(c).
Ejercicio 4.17. Sea f una función continua en [a, b] con f g Riemann integrable en [a, b] para toda función g Riemann integrable en [a, b] y tal que
Rb
a f (x)g(x) dx = 0. Muestre que f (x) = 0 para todo x ∈ [a, b].
Ejercicio 4.18. Sean f, g, h funciones tales que f (x) ≤ g(x) ≤ h(x) para
Rb
todo x ∈ [a, b]. Si f y h son Riemann integrables en [a, b] con a f (x) dx =
Rb
Rb
h(x) dx muestre que g es Riemann integrable en [a, b] y a f (x) dx =
a
Rb
a g(x) dx.
Ejercicio 4.19. Sea a > 0 y sea f un función Riemann integrable en [−a, a].
Muestre que
Ra
Ra
(1) si f (x) = f (−x) (una función par) entonces −a f (x) dx = 2 0 f (x) dx;
Ra
(2)si f (−x) = −f (x) (una función impar) entonces −a f (x) dx = 0.
Ejercicio 4.20. Sea f una función continua en [a, b]. Para c ∈ R defina la
función g(x) := f (x+c). Muestre que g es Riemann integrable en [a−c, b−c]
Rb
R b−c
y que a f (x) dx = a−c g(x) dx.
Ejercicio 4.21. Sea f una función Riemann integrable en [a, b]. Muestre
que
Z b
Z b
f (x) dx =
f (a + b − x) dx.
a
a
¿Cúal es el significado geométrico de esta relación?
Ejercicio 4.22. Sea f Riemann integrable en [ac, bc] para algún c 6= 0.
Muestre que
Z cb
Z b
f (t) dt = c
f (ct) dt.
ca
a
Utilice este resultado para mostrar que
Z a
Z b
Z ab
1
1
1
dt +
dt =
dt.
t
1 t
1 t
1
4 La integral de Riemann
4.3 Sumas de Darboux
51
Sugerencia, vea que
Z
1
b
1
dt =
t
ab
Z
a
1
dt.
t
Ejercicio 4.23. Demuestre el Corolario 4.19.
Ejercicio 4.24. Muestre que si f es continua en [a, b] con f (x) > 0 para
todo x ∈ [a, b] entonces 1/f es Riemann integrable en [a, b].
Ejercicio 4.25. Dé un ejemplo de una función f Riemann integrable en
[0, 1] con f (x) > 0 de modo tal que 1/f no es Riemann integrable en [0, 1].
Ejercicio 4.26. Dé ejemplos de funciones f y g que no sean Riemann
integrables en [a, b] pero con |f | y g 2 Riemann integrables en [a, b].
Ejercicio 4.27. En este ejercicio, veremos como si la función f es continua
en el intervalo [a, b] entonces existe un c en dicho intervalo de modo que
Z b
f (c)(b − a) =
f (x) dx.
a
Geométricamente, cuando la función f es positiva, lo que encontramos es
un rectángulo de área igual al área entre el gráfico de f y el eje horizontal.
Primer teorema del valor medio para integrales. Sea f una función
Riemann integrable en [a, b] con m ≤ f (x) ≤ M para todo x ∈ [a, b]. Muestre
que
Z b
1
f (x) dx ≤ M.
m≤
b−a a
Concluya que si f es una función continua en [a, b] entonces existe c ∈ [a, b]
con
Z b
1
f (c) =
f (x) dx.
b−a a
Por definición, el valor promedio de una funcı́on f en un intervalo [a, b] está
dado por
Z b
1
f (x) dx.
b−a a
Ejercicio 4.28. Para una función continua f calcule
Z
1 a+x
lim
f (t)dt.
x→0 x a
Ejercicio 4.29. Muestre que la conclusión del primer teorema del valor
medio para integrales puede no ser cierto si f no es continua.
Ejercicio 4.30. Segundo teorema del valor medio para integrales.
Sean f una función continua y g una función Riemann integrable en el
intervalo [a, b] tal que g(x) ≥ 0 para todo x ∈ [a, b]. Entonces existe c ∈ [a, b]
tal que
Z b
Z b
f (c)
g(x) dx =
f (x)g(x) dx.
a
a
52
4 La integral de Riemann
4.3 Sumas de Darboux
Ejercicio 4.31. Sea (cn )n una sucesión de números positivos tales que cn →
0 y ncn → ∞. Muestre que si f es continua en [0, 1] entonces
Z cn
nf (x)
π
dx = f (0).
lim
2
2
n→∞ 0
1+n x
2
Sugerencia: use el Ejercicio 4.30.
Ejercicio 4.32. Sea f una función Riemann integrable en [a, b] con 0 ≤
m ≤ f (x) ≤ M para todo x ∈ [a, b]. Muestre que
1/2
Z b
1
2
f (x) dx
≤ M.
m≤
b−a a
Concluya que si f una función continua en [a, b] entonces existe c ∈ [a, b]
con
1/2
Z b
1
2
f (c) =
f (x) dx
.
b−a a
Ejercicio 4.33. Sea f una función Riemann integrable en [a, b] con m ≤
f (x) ≤ M para todo x ∈ [a, b]. Muestre que
Z b
1
f (x)
e
dx ≤ M.
m ≤ ln
b−a a
Concluya que si f una función continua en [a, b] entonces existe c ∈ [a, b]
con
Z b
1
f (c)
e
=
ef (x) dx.
b−a a
Ejercicio 4.34. Sean f y g funciones Riemann integrables en [a, b]. Muestre
que
h(x) := max{f (x), g(x) : x ∈ [a, b]}
y
k(x) := min{f (x), g(x) : x ∈ [a, b]}
son Riemann integrables en [a, b].
Ejercicio 4.35.
Si f es una función Riemann integrable. ¿Qué se puede
√
decir sobre f ?
Ejercicio 4.36. Sea f : [a, b] → R una función continua, estrictamente
monótona y positiva con a ≥ 0. Muestre que
Z f (b)
Z b
f −1 (y) dy = bf (b) − af (a) −
f (x) dx.
f (a)
a
Compare con el Ejercicio 4.61.
Verifique que para todo x ≥ 0 se tiene
Z x
Z 1
√
x
−t2
e dt −
− ln s ds = x2 .
e
0
e−x2
2
Sugerencia: muestre que f (t) = e−t es invertible en [0, x]. Vea el Ejercicio 4.50.
4 La integral de Riemann
4.4 El teorema fundamental del cálculo
53
Ejercicio 4.37. Sea f una función continua en [a, b]. Use el hecho que f
es entonces uniformemente continua, para mostrar que
Z b
n−1 b−aX
i(b − a)
.
f (x) dx = lim
f a+
n→∞ n
n
a
i=0
¿Qué podemos decir en el caso f Riemann integrable en [a, b]?
4.4. El teorema fundamental del cálculo. En esta sección exploramos la
relación existente entre derivación e integración de funciones. Si una función
f es Riemann integrable en [a, b] entonces también es Riemann integrable
en [a, x] para todo x ∈ [a, b] lo cual nos permite definir una nueva función
Z x
F (x) :=
f (y) dy.
a
De esta función F nos interesa estudiar primero su continuidad y segundo su
diferenciabilidad, es decir la derivación de una integral. De igual forma, nos
interesa estudiar la integrabilidad de una derivada. Si una función posee
derivada continua entonces dicha derivada es Riemann integrable. ¿Qué
Rb
podemos decir sobre a f 0 (x) dx?
Teorema 4.32. Primera versión del teorema fundamental del cálculo. 1 Sea f una función Riemann integrable en [a, b]. Entonces la función
F definida en [a, b] mediante
Z x
F (x) :=
f (z) dz
a
es continua en [a, b]. Si además f es continua en c ∈ [a, b] entonces F es
derivable en c y F 0 (c) = f (c).
Prueba: Sea ε > 0 y tome K = sup{|f (x)| : x ∈ [a, b]}. Considere δ =
ε/K > 0 (aquı́ asumimos que f no es idénticamente 0). Si x, y ∈ [a, b] con
y ≥ x y y − x < δ tenemos que
Z y
Z y
|F (y) − F (x)| = f (z) dz ≤
|f (z)| dz ≤ K(y − x) < Kδ = ε
x
x
de donde F es continua en [a, b].
Ahora si f es continua en c, para ε > 0 existe δ > 0 de modo que si |h| < δ
y c + h ∈ [a, b] entonces |f (c + h) − f (c)| < ε. Sin perdida de generalidad
suponemos h > 0. De este modo
Z c+h
Z
F (c + h) − F (c)
1
f (c) c+h − f (c) = f (x) dx −
dx
h
h c
h c
Z
Z
1 c+h
1 c+h
= f (x) − f (c) dx ≤
|f (x) − f (c)| dx < ε.
h c
h c
1Es usual que lo que aquı́ llamamos la primera versión aparezca como la segunda versión
y viceversa.
54
4 La integral de Riemann
4.4 El teorema fundamental del cálculo
Por lo cual
F (c + h) − F (c)
= f (c)
h→0
h
de donde se concluye el resultado.
F 0 (c) = lim
En el resultado anterior vimos que si f es Riemann integrable entonces
F es continua, y que si f es continua entonces F es derivable. Es decir,
al integrar una función continua obtenemos una función derivable. Ahora
nos preguntamos, ¿qué obtenemos si integramos una derivada? Queremos
explorar
Z b
f 0 (x) dx.
a
Teorema 4.33. Segunda versión del teorema fundamental del cálculo. Si f : [a, b] → R es una función tal que f 0 existe y f 0 es Riemann
integrable en [a, b], entonces
Z b
f 0 (x) dx = f (b) − f (a).
a
Prueba: Sea ε > 0, como f 0 es Riemann integrable en [a, b], existe una
partición Pε {a0 , . . . , an } de [a, b] que satisface el Criterio de Cauchy para la
función f 0 . Si aplicamos el teorema de valores intermedios a cada intervalo
[ai , ai+1 ], sabemos que existe ξi ∈ [ai , ai+1 ] para el cual se tiene la relación
f 0 (ξi )(ai+1 − ai ) = f (ai+1 ) − f (ai ). De este modo, hemos encontrado una
suma Riemann para la cual
0
S(f , Pε ; ξ0 , . . . , ξn ) =
=
n−1
X
i=0
n−1
X
f 0 (ξi )(ai+1 − ai )
f (ai+1 ) − f (ai ) = f (b) − f (a).
i=0
Si P es una partición de [a, b] más fina que Pε , sabemos que
S(f 0 , P ) − (f (b) − f (a)) ≤
S(f 0 , P ) − S(f 0 , Pε ; ξ0 , . . . , ξn ) + S(f 0 , Pε ; ξ0 , . . . , ξn ) − (f (b) − f (a))
< ε,
de lo cual se obtiene el resultado.
Es usual denotar f (b) − f (a) mediante
x=b
f (x)|x=a
ó simplemente
f (x)|ba .
Corolario 4.34. Integración por partes. Sean f y g funciones derivables
con derivadas f 0 y g 0 Riemann integrables en [a, b]. Entonces
Z b
Z b
0
f (x)g (x) dx = f (b)g(b) − f (a)g(a) −
f 0 (x)g(x) dx.
a
a
4 La integral de Riemann
4.4 El teorema fundamental del cálculo
55
Definición 4.35. Sea f : [a, b] → R una función. Una antiderivada de
f en [a, b] es una función F : [a, b] → R tal que F 0 (x) = f (x) para todo
x ∈ [a, b].
En el Ejercicio 4.38 veremos que si F1 y F2 son dos antiderivadas de una
función f en un intervalo [a, b] entonces F1 − F2 es constante en [a, b]. De
este modo, dada una función f con una antiderivada F , cualquier miembro
de la familia F (x) + C para C constante es una antiderivada de f . Es usual
denotar
Z
Z
f = f (x) dx = F (x) + C,
y llamarle la integral indefinida de f .
Teorema 4.36. Del cambio de variable. Sea φ : [a, b] → R una función
derivable con derivada φ0 continua. Suponga que f es continua en φ([a, b]).
Entonces
Z
Z
φ(b)
b
f (x) dx =
φ(a)
f (φ(t))φ0 (t) dt.
a
Prueba: Para y ∈ φ([a, b]) defina la función
Z y
F (y) :=
f (x) dx,
φ(a)
y para t ∈ [a, b] defina H(t) := F (φ(t)). Note que H(a) = F (φ(a)) = 0.
Derivando con respecto a t se tiene
H 0 (t) = F 0 (φ(t))φ0 (t) = f (φ(t))φ0 (t).
De este modo, por el teorema fundamental del cálculo
Z b
Z b
Z
0
0
f (φ(t))φ (t) dt =
H (t) dt = H(b) − H(a) =
a
a
φ(b)
f (x) dx,
φ(a)
lo cual concluye el resultado.
Teorema 4.37. de Taylor con residuo integral. Suponga que f y sus
n + 1 primeras derivadas f 0 , ..., f (n) y f (n+1) son todas funciones continuas
en un intervalo [a, b]. Entonces
f (b) = f (a) +
f (n) (a)
f 0 (a)
(b − a) + · · · +
(b − a)n + Rn ,
1!
n!
donde
1
Rn :=
n!
Z
b
(b − t)n f (n+1) (t) dt.
a
La demostración de deja como Ejercicio 4.54 para el lector.
Para finalizar esta sección, presentamos un resultado que nos será de
mucha utilidad, en particular al estudiar integrales impropias.
56
4 La integral de Riemann
4.4 El teorema fundamental del cálculo
Lema 4.38. Sea f una función continua en [a, b]. Si g es decreciente, no
negativa y acotada en [a, b] entonces existe c ∈ [a, b] tal que
Z b
Z c
f (x)g(x) dx = g(a)
f (x) dx.
a
a
Prueba: Si g(a) = 0 entonces g(x) = 0 para todo x ∈ [a, b] y el resultado es
trivial, por lo cual suponemos g(a) > 0.
Rx
Como f es en particular Riemann integrable, F (x) := a f (y) dy es continua, por lo cual existen c1 , c2 ∈ [a, b] tales que
F (c1 ) = min{F (x) : x ∈ [a, b]}
F (c2 ) = max{F (x) : x ∈ [a, b]}.
y
Sea ε > 0. Como F es continua en un intervalo compacto, F es uniformemente continua de modo que dado ε > 0 podemos tomar una partición
P = {a0 , . . . , an } de [a, b] de modo tal que ai+1 − ai < δ(ε) (de la definición
de continuidad uniforme) para tener |F (ai+1 ) − F (ai )| < ε/(g(a) − g(b)),
para g(a) − g(b) 6= 0 claro está.
Además, por la continuidad de f podemos escoger puntos intermedios ξi
de modo que f (ξi )(ai+1 − ai ) = F (ai+1 ) − F (ai ), para tener
0
S (f g, P, {ξi }) :=
n−1
X
f (ξi )g(ai )(ai+1 − ai ) =
i=0
n−1
X
g(ai )(F (ai+1 ) − F (ai ))
i=0
= g(an−1 )F (b) +
n−1
X
(g(ai−1 ) − g(ai ))F (ai ).
i=1
De lo anterior
F (c1 )(g(a)) ≤ S 0 (f g, P, {ξi }) ≤ F (c2 )g(a).
(3)
S 0 (f g, P, {ξi })
Ahora bien,
no es una suma de Riemann para f g en [a, b]
pero está muy cerca de serlo. De hecho,
X
n−1
0
S(f g, P, {ξi }) − S (f g, P, {ξi }) = f (ξi ) g(ξi ) − g(ai ) (ai+1 − ai )
i=0
≤
n−1
X
i=0
ε(g(a) − g(b))
= ε.
g(ai ) − g(ai+1 ) F (ai+1 ) − F (ai ) <
g(a) − g(b)
Por (3), para todo ε > 0 existe una partición P de [a, b] y puntos intermedios
{ξi } de modo tal que
F (c1 )g(a) − ε ≤ S(f g, P, {ξi }) ≤ F (c2 )g(a) + ε.
De la integrabilidad de f g deducimos que
Z b
F (c1 )g(a) ≤
f (x)g(x) dx ≤ F (c2 )g(a).
a
El resultado sigue del teorema de valores intermedios aplicado a la función
F en el intervalo [a, b].
4 La integral de Riemann
4.4 El teorema fundamental del cálculo
57
4.4.1. Ejercicios.
Ejercicio 4.38. Muestre que si F1 y F2 son dos antiderivadas de una
función f en un intervalo [a, b] entonces F1 − F2 es constante en [a, b].
Ejercicio 4.39. Sea sgn la función signo del Ejercicio 4.14. Muestre que la
función sgn es Riemann integrable en [−1, 1] pero que no posee antiderivada
en [−1, 1].
Ejercicio 4.40. Muestre que
Z
x
S(x) :=
sgn(t) dt
−1
para x en el
R xintervalo [−1, 1] está dada por S(x) = |x| − 1. De este modo,
la integral a f (t) dt puede existir aunque no exista una antiderivada.
Ejercicio 4.41. Sea G(x) = x2 sen(π/x2 ) si x ∈]0, 1] y G(0) = 0. Muestre
que G0 (x) = g(x) existe para todo x ∈ [0, 1]. Además muestre que G0 no
es Riemann integrable en [0, 1]. De este modo g posee una antiderivada en
[0, 1] pero no es Riemann integrable en [0, 1]. Sugerencia: G0 no es acotada
en [0, 1].
R1
Muestre que existe lima→0+ a g(x) dx.
Ejercicio 4.42. Calcule f 0 (x) si
Z x3
t2
1. f (x) =
dt,
4
x2 1 + t
Z
2x
2. f (x) =
x
sen t
dt.
t
Ejercicio 4.43. Si f es continua en [a, b] y existen números reales A 6= B
tales que
Z c
Z b
A
f (x) dx + B
f (x) dx = 0,
para todo c ∈ [a, b],
a
c
muestre que f (x) = 0 para todo x ∈ [a, b].
Ejercicio 4.44. Sea f Riemann integrable en [a, b]. Muestre que existe
c ∈ [a, b] tal que
Z c
Z b
f (x) dx =
f (x) dx.
a
c
Ejercicio 4.45. Sean f y g funciones Riemann integrables en [a, b] con g
no negativa y sean m y M números reales tales que
m ≤ inf{f (x) : x ∈ [a, b]},
sup{f (x) : x ∈ [a, b]} ≤ M.
Muestre que existe c ∈ [a, b] tal que
Z b
Z c
Z b
f (x)g(x) dx = m
g(x) dx + M
g(x) dx.
a
a
c
Sugerencia: considere la función
Z x
Z b
F (x) := m
g(t) dt + M
g(t) dt.
a
x
58
4 La integral de Riemann
4.4 El teorema fundamental del cálculo
¿Qué otras conclusiones se pueden obtener?
Ejercicio 4.46. Sea f una función continua en [a, b]. Si g es creciente, no
negativa y acotada en [a, b] muestre que existe c ∈ [a, b] tal que
Z b
Z b
f (x) dx.
f (x)g(x) dx = g(b)
c
a
Ejercicio 4.47. Sea f una función continua en [a, b]. Si g es monótona y
acotada en [a, b] muestre que existe c ∈ [a, b] tal que
Z b
Z c
Z b
f (x)g(x) dx = g(a)
f (x) dx + g(b)
f (x) dx.
a
a
c
Sugerencia: tome h(x) = g(x) − g(a).
Ejercicio 4.48. Trate de sustituir la hipótesis f continua en [a, b] por f
Riemann integrable en [a, b] en el Lema 4.38 y en los Ejercicios 4.46 y 4.47.
Ejercicio 4.49. Sean F y f funciones continuas en [a, b] con F (a) = 0.
Muestre que son equivalentes
(1) F 0 (x) =Rf (x) para todo x ∈ [a, b],
x
(2) F (x) = a f (y) dy para todo x ∈ [a, b].
Ejercicio 4.50. Use el Ejercicio 4.36 para evaluar
Z e
Z 1/√2
ln x dx,
y
arcsen x dx.
1
0
Ejercicio 4.51. Demuestre la fórmula de integración por partes del Corolario 4.34.
Ejercicio 4.52. Si f 0 es continua en [a, b] utilice integración por partes para
mostrar el lema de Riemann-Lebesgue:
Z b
f (t) sen λt dt = 0.
lim
λ→∞ a
Ejercicio 4.53. Otra versión del Teorema del Cambio de Variable.
Sea φ : [a, b] → R una función derivable con derivada continua tal que
φ0 (t) 6= 0 para todo t ∈ [a, b]. Sea I un intervalo tal que φ([a, b]) ⊆ I y sea
ψ : I → R con ψ(x) = φ−1 (x) para todo x ∈ φ([a, b]). Si f : I → R es
continua en I, muestre que
Z b
Z φ(b)
f (φ(t)) dt =
f (x)ψ 0 (x) dx.
a
φ(a)
Ejercicio 4.54. Demuestre el Teorema 4.37. Sugerencia: integre Rn por
partes para obtener
t=b
Z b
1
n (n)
n−1 (n)
Rn =
(b − t) f (t)
+n
(b − t)
f (t) dt
n!
a
t=a
Z b
f (n) (a)
1
n
=−
(b − a) +
(b − t)n−1 f (n) (t) dt
n!
(n − 1)! a
4 La integral de Riemann
4.4 El teorema fundamental del cálculo
59
y repita el proceso.
Ejercicio 4.55. Mediante el cambio de variable t = (1 − s)a + sb verifique
que
Z
(b − a)n+1 1
Rn =
(1 − s)n f (n+1) (a + (b − a)s) ds.
n!
0
Ejercicio 4.56. Muestre que si f es Riemann integrable en [a, b] y si F es
continua en [a, b] con F 0 (x) = f (x) excepto para un número finito de puntos
de [a, b] entonces
Z b
f (x) dx = F (b) − F (a).
a
Ejercicio 4.57. Sea f una función continua en [a, b] y defina G : [a, b] → R
mediante
Z b
G(x) :=
f (y) dy.
x
Halle G0 (x).
Ejercicio 4.58. Para una función continua f calcule F 0 donde
Z x+a
F (x) :=
f (t) dt.
x−a
Ejercicio 4.59. Sea f : [a, b] → R una función continua y sea g : [c, d] → R
una función derivable tal que g([c, d]) ⊆ [a, b]. Demuestre que si G : [c, d] →
R está definida mediante
Z g(x)
G(x) :=
f (y) dy
a
entonces
G0 (x)
= (f ◦
g)(x)g 0 (x)
para todo x ∈ [c, d].
Ejercicio 4.60. Otra versión de integración por partes ó una fórmula para el producto de integrales. Sean f y g funciones continuas
en [a, b]. Entonces
Z b
Z b
Z b
Z x
Z x
f (x) dx
g(x) dx =
g(x)
f (y) dy + f (x)
g(y) dy dx.
a
a
a
a
a
Ejercicio 4.61. Sea f una función inyectiva y diferenciable en un intervalo
abierto I. Es posible mostrar que J = g(I) es un intervalo abierto , y que a
función inversa f −1 es diferenciable en J. Muestre que
Z b
Z f (b)
f (x) dx +
f −1 (y) dy = bf (b) − af (a).
a
f (a)
Sugerencia: use el teorema del cambio de variables e integración por partes.
60
4 La integral de Riemann
4.4 El teorema fundamental del cálculo
Proyecto 4.39. La integral de Riemann-Stieltjes
El lector cuenta en este momento con herramientas más que suficientes
para cubrir por su cuenta la teorı́a correspondiente a la integral de RiemannStieltjes, como se presenta por ejemplo, en las Secciones 29 y 30 del libro de
R. Bartle en la lista de libros de referencia.
Este tipo de integración es tan solo un poco más difı́cil que la integración
de Riemann que acabamos de desarrollar. El tratamiento que dimos a la
integral de Riemann tiene como objetivo minimizar el esfuerzo que el lector
debe hacer para cubrir por su cuenta la teorı́a correspondiente a la integral
de Riemann-Stieltjes.
Este tipo de integración tiene usos importantes en aplicaciones, como en
estadı́stica por ejemplo. El objetivo es estudiar la integrabilidad de una
función f con respecto a otra función g. En pocas palabras, la integral de
Riemann es la integral de Riemann-Stieltjes cuando se toma g(x) = x.
Por definición, una función f es Riemann integrable con respecto a otra
función g en un intervalo [a, b] si existe un número I tal que para todo ε > 0
existe una partición Pε de [a, b] tal que si P = {a = a0 , a1 , . . . , an = b} es
cualquier otra partición de [a, b] más fina que Pε y
S(P, f, g) :=
n−1
X
f (ξk ) g(ak+1 ) − g(ak )
k=0
es una suma cualquiera de Riemann-Stieltjes correspondiente a P entonces
S(P, f, g) − I < ε.
El número I es único y se denota
Z b
Z b
I=
f dg =
f (x) dg(x).
a
a
Básicamente, todas las propiedades que estudiamos para la integral de
Riemann, siguen válidas con modificaciones mı́nimas, para la integral de
Riemann-Stieltjes. Evidentemente, es de esperar nuevas propiedades que
exploten la presencia de la función g.
El resultado más imortante que conecta estos dos tipos de integrales es el
resultado que dice que en caso de tener g 0 continua en [a, b] entonces
Z b
Z b
f dg =
f g0.
a
a
Invitamos al lector a completar los detalles.
61
5. Técnicas de integración
A continuación revisamos en forma muy breve, algunas de las técnicas
de integración usuales en un curso de cálculo. La mejor sugerencia para
los estudiantes de este curso, es tomar cualquier libro de cálculo y resolver
todos los ejercicios. La única forma de aprender a calcular integrales es
precisamente calculando integrales, muchas integrales.
5.1. Integrales inmediatas a partir de derivadas. Como vimos en el
Ejercicio 4.38, dada una función f para la cual existe una función F tal que
F 0 (x) = f (x) para todo x en un intervalo, entonces dicha función F no es
única, de hecho, para cada constante C se tiene que (F (x) + C)0 = f (x). A
la familia de funciones F (x) + C se les llama integral indefinida de f. La
notación usual es
Z
f (x) dx = F (x) + C.
Por ejemplo, dado que sen0 x = cos x tenemos que
Z
cos x dx = sen x + C.
Es evidente que la lista de funciones para las cuales ya conocemos una
antiderivada es bastante extensa, dado que ya conocemos la derivada de
muchas de las funciones usuales del cálculo. Por ejemplo:
Z
sen x dx = − cos x + C pues (− cos x)0 = sen x,
Z
sec2 x dx = tan x + C pues (tan x)0 = sec2 x,
Z
ex dx = ex + C pues (ex )0 = ex ,
Z
xn+1
xn dx =
+ C pues (xn+1 )0 = (n + 1)xn , n 6= −1,
n+1
Z
1
1
dx = ln x + C pues (ln x)0 = ,
x
x
Z
1
1
dx = arctan x + C pues (arctan x)0 =
.
1 + x2
1 + x2
Nota. Al trabajar con logaritmo natural es usual en los libros de cálculo
encontrar la expresión
Z
1
dx = ln |x| + C.
x
Aquı́ la idea es considerar el mayor dominio posible para la función ln, la
cual se extiende a los números negativos mediante la inserción del valor
absoluto. Note que para x < 0, f (x) = ln(−x) tiene perfecto sentido y por
la regla de la cadena f 0 (x) = −1/x.
♦
62
5 Técnicas de integración
5.2 Integración por partes
Si a lo anterior sumamos la linealidad de la derivada, obtenemos la linealidad de la integral indefinida, i.e. como (F (x) + cG(x))0 = F 0 (x) + cG0 (x) =
f (x) + cg(x) para toda constante c, se tiene que
Z
(f (x) + cg(x)) dx = F (x) + cG(x) + C.
Por ejemplo,
Z
cosh x dx = senh x + C.
¿Por qué?
5.2. Integración por partes. En forma similar al Corolario 4.34, al tomar
la derivada de un producto se tiene que (f g)0 = f 0 g + f g 0 por lo cual
Z
f 0 (x)g(x) + f (x)g 0 (x) dx = f (x)g(x) + C.
Al escribir dicha identidad en la forma
Z
Z
0
f (x)g(x) dx = f (x)g(x) − f (x)g 0 (x) + C,
se obtiene una conveniente fórmula que permite calcular integrales indefinidas de productos de funciones en términos de productos de funciones más
sencillas.
Ejemplo 5.1.
Z
Z
x cos
x sen
1 sen
|{z}
| {zx} dx = |{z}
| {z x} − |{z}
| {z x} dx + C = x sen x + cos x + C. g(x) f 0 (x)
g 0 (x) f (x)
g(x) f (x)
Otro ejemplo muy común es el siguiente.
Ejemplo 5.2.
Z
ln x dx = x ln x − x + C
donde tomamos f (x) = x, f 0 (x) = 1, g(x) = ln x y g 0 (x) = 1/x.
Un ejemplo más elaborado es el siguiente.
Ejemplo 5.3.
Z
x
Z
x
e cos
e sen
|{z}
| {zx} dx = |{z}
| {z x} −
g(x) f 0 (x)
Ahora bien
Z
x
Z
e sen
e (− cos x) −
|{z}
| {z x} dx = |{z}
| {z }
g(x) f 0 (x)
g 0 (x) f (x)
g(x) f (x)
x
g(x)
f (x)
ex sen
|{z}
| {z x} dx + C1 .
ex (− cos x) dx + C2 .
|{z}
| {z }
g 0 (x)
f (x)
Al reemplazar en la primera identidad se obtiene
Z
Z
x
x
x
e cos x dx = e sen x + e cos x − ex cos x dx + C1 − C2
5 Técnicas de integración
5.3 Integración por sustitución
63
y ası́
Z
ex cos x dx =
ex
(sen x + cos x) + C.
2
5.2.1. El uso de diferenciales. Del primer curso de cálculo en una variable
recordamos que, si f es una función de la variable x entonces, el diferencial
de f se define como
df (x) := f 0 (x) dx
donde dx es cualquier valor (generalmente pequeño) que representa un incremento en la variable x. De este modo, la notación para integrales indefinidas
y la notación para diferenciales, se amalgaman para producir la notación
Z
Z
df (x) = f (x) + C
o simplemente
df = f + C.
Ahora bien, por la regla de la cadena, si u y v son funciones de la misma
variable se tiene que
d(uv) = vdu + udv
y ası́, en forma similar a la deducción anterior,
Z
Z
u dv = uv − v du.
Ejemplo 5.4. Para calcular
u = arctan x,
R
(arctan x) x dx tomamos
dv = x dx,
du =
1
dx,
1 + x2
v=
x2
.
2
De este modo
Z
Z 2
x2
x
1
(arctan x) x dx = (arctan x)
−
dx + C
2
2 1 + x2
Z x2 1
1
= (arctan x)
−
1−
dx + C
2
2
1 + x2
1 2
x arctan x − x + arctan x + C.
=
2
5.3. Integración por sustitución. Conocida como integración mediante
cambio de variable, la integración por sustitución en forma similar al
Teorema 4.36, se basa en la regla de la cadena. La relación
(f ◦ g)0 (x) = f 0 (g(x))g 0 (x),
implica
Z
f 0 (g(x))g 0 (x) dx = (f ◦ g)(x) + C.
Un ejemplo sencillo es
64
5 Técnicas de integración
Ejemplo 5.5.
Z
xe
−x2
1
dx = −
2
Z
5.3 Integración por sustitución
1
2
2
(−2x)e−x dx = − e−x + C
2
donde g(x) = −x2 , g 0 (x) = −2x y f (x) = ex = f 0 (x).
¿Porqué no utilizamos integración por partes en el ejemplo anterior?
Una clase interesante de integrales indefinidas que se resuelven mediante
sustitución es la clase que involucra las funciones trigonométricas.
Ejemplo 5.6.
sen4 x
+C
4
donde g(x) = sen x, g 0 (x) = cos x, f 0 (x) = x3 y f (x) = x4 /4.
Z
sen3 x cos x dx =
Una forma muy conveniente de utilizar el cambio de variable es mediante
el uso de la integral definida, como se observa en el siguiente ejemplo.
Ejemplo 5.7. Considere por ejemplo la integral indefinida
Z
1
√
du.
2
u 1 − u2
Si tomamos u = sen t, entonces por el Teorema 4.36 tenemos que
Z x
Z sen x
1
1
√
√
du =
sen0 t dt
2
2
2
2
1−u
sen t 1 − sen t
sen a u
Za x
1
dt = − cot x + cot a.
=
2
a sen t
Con y = sen x y b = sen a se tiene
Z y
1
√
du = − cot arcsen y + cot arcsen b.
2 1 − u2
b u
Como
1
,
(− cot arcsen y)0 = p
2
y 1 − y2
se concluye
Z
1
√
du = − cot arcsen u + C.
u2 1 − u2
Veamos en un ejemplo como utilizar los diferenciales en el cambio de
variables.
Ejemplo 5.8. Considere
Z
√
x 2x − 1 dx
y tome u = 2x − 1. Ası́ x = (u + 1)/2 y du = 2dx. Obtenemos
Z
Z
Z
√
u + 1 √ du
1
x 2x − 1 dx =
u
=
u3/2 + u1/2 du
2
2
4
u5/2 u3/2
1
1
=
+
+ C = (2x − 1)5/2 + (2x − 1)3/2 + C.
10
6
10
6
5 Técnicas de integración
5.4 Fracciones parciales
65
Es importante notar que más que un truco, el razonamiento anterior tiene
perfecto sentido apoyado en el Teorema 4.36, tal y como se pone de manifiesto en el Ejemplo 5.7.
5.4. Fracciones parciales. En este apartado queremos ver como integrar
expresiones de la forma p(x)/q(x) con p y q polinomios. Si el orden de p es
mayor que o igual al orden de q entonces es posible expresar
p(x)
r(x)
= s(x) +
q(x)
q(x)
con r y s polinomios de modo que el orden de r sea estrictamente menor
que el orden de q. El paso siguiente es factorizar q en polinomios irreducibles
q(x) = q1 (x) · · · qn (x) con la esperanza de descomponer el último cociente
como una suma de cocientes de fácil integración
r(x)
r1 (x)
rn (x)
=
+ ··· +
,
q(x)
q1 (x)
qn (x)
de modo que
Z
p(x)
dx =
q(x)
Z
Z
s(x) dx +
r1 (x)
rn (x)
+ ··· +
dx.
q1 (x)
qn (x)
En cualquier libro de cálculo el lector puede encontrar un tratamiento completo sobre esta técnica de integración. Nosotros nos limitamos a presentar
una variedad moderada de ejemplos.
Ejemplo 5.9.
Z
Z
1
1
1
dx =
−
dx = ln(x − 3) − ln(x − 2) + C. 2
x − 5x + 6
x−3 x−2
Ejemplo 5.10.
Z
Z
Z
5x2 + 20x + 6
5x2 + 20x + 6
6
1
9
dx =
dx =
−
+
dx
x3 + 2x2 + x
x(x + 1)2
x x + 1 (x + 1)2
9
= 6 ln x − ln(x + 1) −
+ C.
x+1
Ejemplo 5.11.
Z
Z
x3 − 2x − 4
x3 − 2x − 4
dx
=
dx
x4 − x3 + 4x2 − 4x
x(x − 1)(x2 + 4)
Z
1
1
x
2
=
−
+ 2
+ 2
dx
x x−1 x +4 x +4
1
x
= ln x − ln(x − 1) + ln(x2 + 4) + arctan + C.
2
2
66
5 Técnicas de integración
5.5 Otras técnicas
Ejemplo 5.12.
Z
Z
3x + 4
3x + 4
dx =
dx
3
x − 2x − 4
(x − 2)(x2 + 2x + 2)
Z
x+1
1
1
− 2
dx = ln(x − 2) − ln(x2 + 2x + 2) + C. =
x − 2 x + 2x + 2
2
Ejemplo 5.13.
Z
Z
Z
x2
x2
1
1
dx
=
dx
=
−
dx
x4 + 2x2 + 1
(x2 + 1)2
x2 + 1 (x2 + 1)2
x
1
arctan x + 2
+C
= arctan x −
2
x +1
¿Cómo se calculó la segunda integral? Sugerencia: al tomar x = tan u
obtenemos u = arctan x y du = dx/(1 + x2 ).
5.5. Otras técnicas. Las técnicas de integración son más que abundantes,
y es muy conveniente tener una clara idea sobre que técnicas son las más adecuadas para que tipos de integrales. Lo más usual es combinar las diferentes
técnicas.
Ejemplo 5.14. Con u = sen x
Z
Z
Z
cos x
1
1
1
dx =
du = −
−
du
sen x(sen x − 1)
u(u − 1)
u u−1
= − ln u + ln(u − 1) + C = − ln(sen x) + ln(sen x − 1) + C.
Para terminar este breve resumen llamamos la atención del lector al uso de
las identidades trigonométricas. Está de más decir que las fórmulas usuales
de trigonometrı́a son más que útiles en el cálculo de integrales.
Ejemplo 5.15.
Z
Z
1
sen(mx) sen(nx) dx =
cos((m − n)x) − cos((m + n)x) dx
2
1
1
1
sen((m − n)x) +
sen((m + n)x)
=
2 m−n
m+n
siempre que m − n 6= 0 6= m + n.
¿Qué podemos hacer en los siguientes casos?
Z
Z
cos(mx) cos(nx) dx,
cos2 (mx) dx,
Z
Z
sen(mx) cos(nx) dx,
sen2 (mx) dx.
5 Técnicas de integración
5.5 Otras técnicas
67
5.5.1. Ejercicios.
Ejercicio 5.1. Tome un libro de cáculo de la biblioteca y calcule todas las
integrales que contenga. Los diferentes trucos y como saber que método
utilizar para que integral solo se aprenden practicando.
Los siguientes son solo unos pocos ejercicios para practicar integración.
Ejercicio 5.2. Justifique el Ejemplo 5.8 usando un razonamiento similar al
del Ejemplo 5.7.
Ejercicio 5.3. Complete los detalles del Ejemplo 5.13.
Ejercicio 5.4. Para m y n números enteros no negativos verifique que
Z 1
Z 1
n
m
x (1 − x) dx =
xm (1 − x)n dx
0
0
y calcule el valor de la integral.
Ejercicio 5.5. Muestre que
Z 1
n
X
1
24
2n
k n
(−1)
=
(1 − x2 )n dx =
···
.
k 2k + 1
35
2n + 1
0
k=0
Ejercicio 5.6. Verifique la fórmula de reducción
Z
Z
1
x
2n − 3
1
1
dx =
+
dx.
2
n
2
n−1
(1 + x )
2n − 2 (1 + x )
2n − 2
(1 + x2 )n−1
Ejercicio 5.7. Calcule las siguientes integrales (ó en su defecto, proporcione
una fórmula de recurrencia ó de reducción)
Z
Z
Z
n ax
n
1. x e dx,
2. x sen ax dx,
3. xn cos ax dx,
Z
4.
Z
7.
n
x
Z
10.
xn ln x dx,
√
Z
5.
Z
ax + b dx,
eax sen bx dx,
8.
Z
11.
xn arcsen ax dx,
Z
xn arctan ax dx,
Z
xn lnm x dx,
Z
(1 − x2 )n sen bx dx.
6.
xn
√
dx,
ax + b
9.
eax cos bx dx,
12.
Ejercicio 5.8. Para k y n enteros positivos calcule
Z
Z
2k+1
n
1. sen
x cos x dx,
2. senn x cos2k+1 x dx.
¿Qué sugiere para el caso
Z
sen2k x cos2n x dx?
p
p
Sugerencia: cos x = (1 + cos 2x)/2 y sen x = (1 − cos 2x)/2.
68
5 Técnicas de integración
5.5 Otras técnicas
¿Qué tan general se pueden tomar k y n en las integrales anteriores?
Calcule
Z b
Z b
cos2 x dx,
sen2 x dx.
a
a
Ejercicio 5.9. Para k y n enteros positivos calcule
Z
Z
2k
n
1. sec x tan x dx,
2. secn x tan2k+1 x dx.
¿Qué sugiere para el caso
Z
sec2k+1 x dx?
¿Qué tan general se pueden tomar k y n en las integrales anteriores?
Ejercicio 5.10. Verifique las siguientes fórmulas de reducción:
Z
Z
senn−1 x cos x n − 1
1. senn x dx = −
+
senn−2 x dx,
n
n
Z
Z
cosn−1 x sen x n − 1
n
+
2. cos x dx =
cosn−2 x dx,
n
n
Z
Z
cosm+1 x senn−1 x
n−1
3. cosm x senn x dx = −
+
cosm x senn−2 x dx,
m+n
m+n
Z
Z
secn−2 x tan x n − 2
n
4. sec x dx =
+
secn−2 x dx.
n−1
n−1
Ejercicio 5.11. Demuestre las fórmulas de Wallis:
Z π/2
Z π/2
n−1
246
n
···
, para n ≥ 3 impar,
sen x dx =
cosn x dx =
357
n
0
0
Z π/2
Z π/2
135
n−1 π
senn x dx =
cosn x dx =
···
, para n ≥ 2 par.
2
4
6
n 2
0
0
Ejercicio 5.12. Verifique que
Z
Z
√
2
xn−1
xn
√
dx =
xn a + bx − na √
dx .
(2n + 1)b
a + bx
a + bx
Ejercicio 5.13. Verifique que
Z
Z
n
n
ln x dx = x ln x − n lnn−1 x dx.
Ejercicio
Z
1.
Z
2.
Z
3.
5.14. Para a > 0 verifique las fórmulas
p
p
1 2
x
2
2
2
2
a − x dx =
a arcsen + x a − x + C,
2
a
p
p
p
1
2
x2 − a2 dx =
x x2 − a2 − a ln x + x2 − a2 + C,
2
p
p
1 p 2
2
2
2
2
2
2
x + a dx =
x x + a + a ln x + x + a
+ C.
2
5 Técnicas de integración
5.5 Otras técnicas
69
Ejercicio 5.15. Verifique la fórmula de reducción
Z
Z
1
n
n−1
tan x dx =
tan
x − tann−2 x dx.
n−1
Ejercicio 5.16. Verifique que
Z 1/x
Z 1
1
1
dt =
dt.
2
1 + t2
1
x 1+t
¿Cúal es el significado geométrico de esta identidad? Concluya que
arctan x + arctan
1
π
= .
x
2
Ejercicio 5.17. Deduzca fórmulas análogas a las del Ejemplo 5.15 para
Z
Z
1. sen mx cos nx dx
y
2. cos mx cos nx dx.
Ejercicio 5.18. El producto interno de dos funciones f y g sobre [a, b] se
define como
Z b
hf, gi =
f (x)g(x) dx.
a
Se dice que dos funciones distintas f y g son ortogonales si hf, gi = 0.
Considere las funciones fn (x) = sen nx, n = 0, 1, 2, 3, . . . y gn (x) = cos nx,
n = 1, 2, 3, . . . en [−π, π].
Demuestre que
Z π
0 si m 6= n,
sen mx sen nx dx =
π si m = n.
−π
Evalúe
Z
π
1.
Z
sen mx cos nx dx
y
π
2.
−π
cos mx cos nx dx.
−π
Ejercicio 5.19. Ponga t = tan(x/2) y muestre que
x = 2 arctan t,
dx =
2
dt,
1 + t2
Use lo anterior para calcular
Z
1
1.
dx,
1 + sen x
sen x =
Z
2.
2t
,
1 + t2
cos x =
1 − t2
.
1 + t2
1
dx.
sen x + cos x
Ejercicio 5.20. Utilice el cambio de variable u = tan x para calcular las
integrales
Z
Z
Z
1
1
1
1.
dx,
2.
dx,
3.
dx.
2
4
2
2
1 + sen x
sen x cos x
sen x cos4 x
70
5 Técnicas de integración
5.5 Otras técnicas
Ejercicio 5.21. Si f es integrable en [−π, π] muestre que el valor mı́nimo
de
Z π
Z
1 π
2
(f (x) − a cos nx) dx
se alcanza para
a=
f (x) cos nx dx
π −π
−π
y el valor mı́nimo de
Z π
Z
1 π
2
(f (x) − a sen nx) dx
se alcanza para
a=
f (x) sen nx dx.
π −π
−π
Ejercicio 5.22. Defina
Z
1 π
an =
f (x) cos nx dx para n = 0, 1, 2, 3, . . . ,
π −π
y
Z
1 π
bn =
f (x) sen nx dx para n = 1, 2, 3, . . . .
π −π
Muestre que para cualesquiera números ci y di :
2
Z π
N
c0 X
f (x) −
+
cn cos nx + dn sen nx
dx
2
−π
n=1
2 X
Z π
N
N
a0 c0 X
c0
2
2
2
=
f (x) dx − 2π
+
an cn + bn dn + π
+
cn + dn
2
2
−π
n=1
n=1
2 X
Z π
N
a0
2
2
2
=
f (x) dx − π
+
an + bn
2
−π
n=1
N
c0
a0 2 X
2
2
√ −√
+π
+
(cn − an ) + (dn − bn ) .
2
2
n=1
De este modo, la primera integral es mı́nima cuando ai = ci y bi = di . De
cierta manera que precisaremos más adelante en este curso, la función
N
a0 X
g(x) =
+
an cos nx + bn sen nx
2
n=1
es la mejor aproximación para f en [−π, π] de entre todas las posibles funciones de la forma
N
c0 X
+
cn cos nx + dn sen nx.
2
n=1
71
6. Aplicaciones de la integral definida
En esta sección cubrimos algunas de las multiples aplicaciones de la integral. De ninguna manera pretendemos hacer un tratado exhaustivo de todas
ellas. Una vez más, lo más importante es el trabajo que el lector hace por
su propia cuenta. Entre las aplicaciones que veremos se encuentran: áreas
encerradas por curvas (tanto en coordenadas rectangulares como polares),
longitud de curvas en el plano, volumen de un sólido de revolución y masa
de un alambre plano.
El desarrollo será más intuitivo que formal, por lo cual se invita al lector
interesado a dar los argumentos necesarios para justificar todos los razonamientos.
6.1. Áreas encerradas por curvas. La aplicación que motivó el desarrollo
de la integral de Riemann (al menos en estas notas) fue el cálculo del área
de la región encerrada por curvas continuas en el plano. En la Sección 4.1
vimos como dicho problema se reduce al cálculo del área encerrada bajo el
gráfico de una función positiva y el eje OX en el intervalo [a, b].
En el siguiente ejemplo, hacemos uso de los resultados sobre integración
definida para calcular el área entre dos curvas.
Ejemplo 6.1. Determine el área encerrada por las gráficas de las funciones
f (x) = 2x/π y g(x) = sen x.
1.2
0.8
0.4
-2.4
-2
-1.6
-1.2
-0.8
-0.4
0
0.4
0.8
1.2
1.6
2
2.4
-0.4
-0.8
-1.2
Los ceros de la ecuación sen x − 2x/π = 0 son x = −π/2, 0, π/2. De este
modo, el área de la región está dada por
Z 0
Z π/2
2x
2x
− sen x dx +
sen x −
dx
π
−π/2 π
0
Z π/2
2x
2x2 π/2 π
=2
sen x −
dx = −2 cos x +
= + 2.
π
π 0
2
0
por simetrı́a del gráfico.
72
6 Aplicaciones de la integral definida
Nota. Al calcular la integral
Z
π/2
sen x −
−π/2
6.2 Longitud de curvas planas
2x
dx
π
nos damos cuenta que, por la imparidad de la función, dicha integral es cero.
Geométricamente usamos el hecho que la integral determina el negativo del
área encerrada, para funciones negativas.
♦
Ejemplo 6.2. Halle el área encerrada por las curvas x = y 2 y x = y + 1.
2
1.6
1.2
0.8
0.4
0
0.4
0.8
1.2
1.6
2
2.4
2.8
3.2
3.6
4
4.4
-0.4
-0.8
Una posibilidad es encontrar las intersecciones (x1 , y1 ) y (x2 , y2 ) de los dos
gráficos con x1 < x2 y entonces calcular
Z x1
Z x2
√
√
√
x − (− x) dx +
x − (x − 1) dx.
0
x1
Otra posibilidad es intercambiar los papeles de x y de y, y notar que el
área está dada por la integral
Z y2
y + 1 − y 2 dy.
y1
6.2. Longitud de curvas planas. En esta sección, el resultado del Ejercicio 4.37 es central en nuestro desarrollo.
Si bien el siguiente razonamiento es puramente intuitivo, es posible formalizarlo. Lo más importante ahora es aprender a utilizar este tipo de
razonamiento para resolver diferentes problemas del cálculo que involucran
la integral de Riemann.
Sea f : [a, b] → R una función continua y derivable en ]a, b[. Nuestro
objetivo es determinar la longitud del gráfico de la función en el intervalo
[a, b]. Para cualquier n ∈ N consideramos la partición uniforme Pn de [a, b]
dada por ai = a + i(b − a)/n para todo i = 0, 1, . . . , n − 1. Dicha partición
determina sobre el gráfico de f una colección de n + 1 puntos (ai , f (ai )) de
6 Aplicaciones de la integral definida
6.3 Longitud de curvas planas
73
modo tal que el segmento de recta que une (ai , f (ai )) con (ai+1 , f (ai+1 )) es
una aproximación del gráfico de f entre ai y ai+1 .
f (ai )
f (ai+1 )
La longitud del gráfico de f en dicho segmento, se puede aproximar por
la longitud del segmento de recta en cuestión dada por
p
∆si = (ai+1 − ai )2 + (f (ai+1 ) − f (ai ))2
s
f (ai+1 ) − f (ai ) 2
= (ai+1 − ai ) 1 +
.
ai+1 − ai
Por el teorema del valor medio, podemos asumir que existe ci ∈ [ai , ai+1 ]
de modo que
f (ai+1 ) − f (ai ) = f 0 (ci )(ai+1 − ai ).
Al sumar sobre i obtenemos que las longitudes de los diferentes segmentos
aproximan la longitud del gráfico de f entre a y b y que dicha aproximación
esta dada por
sn =
n−1
Xp
p
1 + f 0 (ci )2 (ai+1 − ai ) = S( 1 + (f 0 )2 , Pn ; c0 , . . . , cn ).
i=0
p
¡Una suma de Riemann para la función 1 + f 0 (x)2 !
Por lo cual, la longitud del gráfico de la función f en p
el intervalo [a, b]
está dada mediante el lı́mite de las sumas de Riemann S
1 + (f 0 )2 , Pn :
n−1
b−a Xp
lim
1 + f 0 (ci )2 =
n→∞ n
i=0
Z bp
1 + (f 0 (x))2 dx.
a
Ejemplo 6.3. Calcule la longitud de arco de la función f (x) = ln(cos x) en
el intervalo [0, π/4]. Por lo anterior,
Z π/4 q
Z π/4 r
Z π/4
2
sen2 x
0
1 + (ln(cos x)) dx =
1+
dx =
sec x dx
cos2 x
0
0
0
Z π/4
√
π/4
sec2 x + sec x tan x
dx = ln sec x + tan x =
= ln(1 + 2). sec x + tan x
0
0
74
6 Aplicaciones de la integral definida
6.4 Volumen de revolución
6.3. Volumen de revolución. La forma en que enfrentamos el problema
de calcular la longitud de arco se puede utilizar en múltiples aplicaciones.
En esta sección queremos calcular el volumen del sólido de revolución que
se obtiene al girar el gráfico de la función f alrededor del eje OX.
Sea f : [a, b] → R una función continua positiva, y para cualquier n ∈ N
consideramos nuevamente la partición uniforme Pn de [a, b]. Cuando el
gráfico de la función f gira alrededor del eje OX, cada punto (ξi , f (ξi )) gira
en el espacio dibujando un cı́rculo de centro (ξi , 0) y radio |f (ξi )|.
De este modo, el volumen que el
gráfico de f genera al girar alrededor del eje OX en el intervalo
[ai , ai+1 ] se puede aproximar mediante
f (ai+1 )
f (ξi )
f (ai )
Vi = πf (ξi )2 (ai+1 − ai )
siempre que ξi ∈ [ai , ai+1 ].
Al sumar sobre i y tomar el lı́mite n → ∞ se obtiene que el volumen que
genera f al girar alrededor del eje OX en el intervalo [a, b] está dado por
2
lim S(πf , Pn ) = lim
n→∞
n→∞
n−1
X
Z
2
b
πf (ξi ) (ai+1 − a1 ) =
πf (x)2 dx.
a
i=0
Note como nuevamente la expresión la obtuvimos como el lı́mite de unas
sumas de Riemann.
Ejemplo 6.4. Halle el volumen encerrado entre la esfera x2 + y 2 + z 2 = 25
y el cilindro y 2 + z 2 = 9.
7.5
5
2.5
-7.5
-5
-2.5
0
2.5
5
7.5
10
-2.5
Usando las funciones g(x) = 3 y f (x) =
obtenemos que el volumen está dado por
Z 4 p
Z
2
π
25 − x2 − 32 dx = π
−4
√
25 − x2 en el intervalo [−4, 4]
4
−4
16 − x2 dx =
256π
.
3
6 Aplicaciones de la integral definida
6.5 Masa de un alambre
75
6.4. Área en coordenadas polares. El área de un sector circular de radio
r y ángulo θ (en radianes) está dada por la relación A = θr2 /2.
Si r = f (θ) con f continua y no negativa en [α, β], podemos considerar la
partición uniforme de dicho intervalo.
De este modo, el área de la porción del
plano descrita por el conjunto de puntos
α
β
{(r, θ) : 0 ≤ r ≤ f (θ), αi ≤ θ ≤ αi+1 },
se puede aproximar mediante
1
Ai = (αi+1 − αi )f 2 (θi )
2
para algún θi ∈ [αi , αi+1 ].
f (θ)
Como en el resto de esta sección, al sumar sobre i concluimos que en
coordenadas polares, el área de la región descrita por el conjunto de puntos
{(r, θ) : 0 ≤ r ≤ f (θ), α ≤ θ ≤ β}, está dada por
lim S(f 2 /2, Pn , {θi }) = lim
n→∞
n→∞
n−1
X
i=0
1
1
f (θi )2 (αi+1 − α1 ) =
2
2
Z
β
f 2 (θ) dθ.
α
6.5. Masa de un alambre. Queremos determinar la masa de un alambre
plano, cuya forma está dada por el gráfico de una función f sobre un intervalo
[a, b], de modo tal que la densidad en cada punto (x, f (x)) está dada por
una función positiva ρ(x).
Una vez más dividimos el intervalo [a, b] en n + 1 puntos equidistantes ai .
La masa del alambre entre los puntos (ai , f (ai )) y (ai+1 , f (ai+1 )) se puede
aproximar mediante
s
f (ai+1 ) − f (ai ) 2
(ai+1 − ai )
mi ∼ ρ(ai )li = ρ(ai ) 1 +
ai+1 − ai
donde li es la longitud del segmento de recta que une los puntos (ai , f (ai ))
y (ai+1 , f (ai+1 )). Gracias al teorema del vaor medio, dicha aproximacuón
se puede reemplazar por
q
2
mi ∼ ρ(ξi ) 1 + f 0 (ξi ) (ai+1 − ai )
para algún ξi ∈ [ai , ai+1 ] de modo tal que la masa del alambre se aproxima
mediante
Z b
q
n−1
X
p
2
0
2
m = lim
mi ∼ lim S(ρ 1 + (f ) , Pn ) =
ρ(x) 1 + f 0 (x) dx.
n→∞
i=0
n→∞
a
76
6 Aplicaciones de la integral definida
6.6 Otras aplicaciones
Ejemplo 6.5. Un ejemplo concreto es el de una varilla rı́gida la cual, podemos imaginar como el eje x en el intervalo [0, L] y densidad en el punto
(x, 0) dada por la función positiva ρ(x). Usando el razonamiento anterior
sabemos que la masa total de la varilla es
Z L
Z L
p
2
m=
ρ(x) 1 + 0 dx =
ρ(x) dx.
0
0
6.6. Otras aplicaciones. Son multiples las aplicaciones de la integral, tanto en una como en varias variables. Muchas de estas aplicaciones se encuentran en el estudio de conceptos fı́sicos como masa de alambres o láminas,
centros de masa y momentos de inercia, etc. Para finalizar esta sección
revisamos en forma aún más breve otras aplicaciones.
6.6.1. Movimiento rectilı́neo. En el movimiento rectilı́neo, la velocidad de
un objeto está dada como la derivada de la función posición. Aquı́ identificamos posición con distancia recorrida a partir de un punto fijo s(t0 ). Si
s(t) determina la posición y v(t) la velocidad entonces por el teorema fundamental del cálculo, la integral de la velocidad recupera la distancia recorrida
a partir de un punto s(a):
Z t1
Z t1
v(t) dt =
s0 (t) dt = s(t1 ) − s(t0 ).
t0
t0
De igual modo, la aceleración a(t) la cual está dada como la derivada de la
velocidad se puede integrar para recuperar la velocidad.
6.6.2. Aplicaciones a la probabilidad. Una de las más importantes aplicaciones se dan en probabilidad. A grosso modo, la probabilidad estudia situaciones (variables) en las que el resultado no se puede predecir con exactitud,
pero cuyo valor varı́a entre observaciones dadas. A tal variable le llamamos
variable aleatoria. Por ejemplo, al lanzar una moneda hay dos posibles
resultados.
Un ejemplo más elaborado estudia la estatura de los individuos de la
población mundial. En la práctica, al seleccionar una persona cualquiera se
puede esperar que su estatura sea un número real entre A y B donde A es la
estatura de la persona más baja y B es la estatura de la persona más alta.
Al estudiar variables aleatorias nos interesa saber cual es la probabilidad
de que al hacer una medición cualquiera, esta quede dentro de un intervalo
predeterminado. Por ejemplo, que probabilidad hay de que al seleccionar
un individuo este mida entre 1.7 y 1.8 metros.
Si X representa una variable aleatoria que toma valores entre A y B, nos
interesa saber la probabilidad de que el valor medio de X este entre C y D
para [C, D] ⊂ [A, B], denotado P (C ≤ X ≤ D).
Un tipo más general de variable aleatoria es la variable aleatoria continua.
Usualmente, una variable aleatoria continua X está descrita por una función
6 Aplicaciones de la integral definida
6.6 Otras aplicaciones
77
de densidad de probabilidad f (X) de modo tal que
Z D
Z B
P (C, X, D) =
f (X) dX
con
f (X) dX = 1.
C
A
En general f es continua y f (X) ≥ 0. Note como las relaciones anteriores
justifican el pensar en una densidad de probabilidad como en una densidad
de masa, con masa total 1.
Es usual encontrarse con variables aleatorias que toman valores en intervalos infinitos por lo que la probabilidad puede tomar una de las formas:
Z ∞
Z D
Z ∞
f (X) dX,
f (X) dX,
f (X) dX.
−∞
−∞
C
Este tipo de integrales se llaman impropias y serán el tema de discusión en
una sección futura.
Otra aplicación muy útil es la media o valor esperado
Z B
µ=
Xf (X) dX
A
que mide el valor promedio de X si se realizaran una gran cantidad de
mediciones.
6.6.3. Ejercicios.
Ejercicio 6.1. ¿Cómo podemos resolver el problema de calcular el volumen
del sólido de revolución que se obtiene al girar el gráfico de f alrededor del
eje OY ?
Ejercicio 6.2. Estudie el método de capas para calcular volúmenes de sólidos
y demuestre la fórmula para un eje vertical de revolución:
Z b
V = 2π
p(x)h(x) dx
a
donde h es la altura hasta el punto x y p la distancia al eje de giro.
Ejercicio 6.3. Sea S un sólido en el espacio de tres dimensiones acotado
entre los planos verticales x = a y x = b, de modo tal que el área de la
sección vertical através del punto (x, 0, 0) paralela al plano OY Z está dada
por A(x). Muestre que el volumen del sólido está dado por
Z b
V =
A(x) dx.
a
Ejercicio 6.4. Demuestre el teorema de Cavalieri: “Si dos sólidos tienen la
misma altura y todas sus secciones planas paralelas a sus bases, a la misma
distancia de cada base, tienen la misma área, entonces los sólidos tienen
igual volumen.”
Ejercicio 6.5. Muestre que el volumen de un cono circular recto de radio
r en la base y altura h está dado por V = πr2 h/3.
78
6 Aplicaciones de la integral definida
6.6 Otras aplicaciones
Ejercicio 6.6. Identifique el sólido de revolución para el cual la integral
Z r
p
p
(R + r2 − x2 )2 − (R − r2 − x2 )2 ) dx
π
−r
calcula el volumen.
Ejercicio 6.7. ¿Cómo podemos resolver el problema de calcular el área de
la superficie de revolución que se obtiene al girar el gráfico de f alrededor
del eje OX?
Ejercicio 6.8. Halle el área de la superficie de la esfera x2 + y 2 + z 2 = r2 .
Ejercicio 6.9. ¿Cómo podemos resolver el problema de calcular el área de
la superficie de revolución que se obtiene al girar el gráfico de f alrededor
del eje OY ?
0
0.8
1.6
2.4
3.2
4
4.8
Ejercicio 6.10. Determine el área
de uno de los “pétalos” de la “rosa”
determinada por la ecuación r =
3 cos 3θ. Sugerencia: r = 0 si θ =
. . . , −π/6, π/6, . . .
5.6
Ejercicio 6.11. Longitud de arco en forma paramétrica. Si
f (t) = (x(t), y(t))
es una función derivable (ambas x y y son derivables) en un intervalo [a, b] de
modo tal que f no se corta a sı́ misma decimos que f es una parametrización
de la curva que representa el gráfico
{(x, y) ∈ R2 : (x, y) = f (t), t ∈ [a, b]}.
Utilice las técnicas de esta sección para deducir la fórmula
Z bp
s=
(x0 (t))2 + (y 0 (t))2 dt
a
para calcular la longitud de la curva descrita por f .
Calcule la longitud de la curva descrita por f (t) = (t cos t, t sen t) para
t ∈ [0, π/4].
Ejercicio 6.12. Utilice el ejercicio
anterior para deducir la fórmula de
longitud de arco en coordenadas polares
Z βp
s=
(r(θ))2 + (r0 (θ))2 dθ.
0
0.8
1.6
2.4
3.2
4
4.8
5.6
6.4
α
Sugerencia: x = r cos θ = r(θ) cos θ,
y = r sen θ = r(θ) sen θ.
6 Aplicaciones de la integral definida
6.6 Otras aplicaciones
79
Ejercicio 6.13. Calcule la longitud de la cardioide dada por r(θ) = 2 −
2 cos θ para θ ∈ [0, 2π].
Ejercicio 6.14. Un autobús parte de la parada cada 20 minutos. Utilice la
función de densidad uniforme
1
20 si 0 ≤ x ≤ 20,
f (x) =
0 en cualquier otro caso,
para determinar la probabilidad de que una persona deba esperar al menos
5 minutos en la parada. ¿Cúal es el tiempo medio de espera?
Ejercicio 6.15. La función densidad exponencial viene dada por f (t) =
e−t/µ /µ. Por estar definida en [0, ∞[ la probabilidad involucrada es una
integral impropia, de todos modos, la probabilidad de que el tiempo transcurrido antes del próximo suceso esté entre t1 y t2 unidades de tiempo viene
dada por
Z t2
1 −t/µ
e
dt.
t1 µ
Utilice µ = 20 para determinar la probabilidad de que una persona deba
esperar al menos 5 minutos en la parada del ejercicio anterior.
Ejercicio 6.16. Halle el valor de c de modo tal que f (x) = x2 + x + 1
represente una función de densidad de probabilidad para la variable x en el
intervalo [0, c]. Además, calcule la probabilidad de que x tome un valor entre
c/3 y 2c/3. Por último, calcule el valor esperado.
Ejercicio 6.17. La función f (x) = kxn (1−x)m para x ∈ [0, 1] con m, n > 0
y k constante se usa para representar diversas distribuciones de probabilidad.
Si se elige k de modo que
Z 1
f (x) dx = 1
0
la probabilidad de que x esté entre a y b para a, b ∈ [0, 1] viene dada por
Z b
P (a ≤ x ≤ b) =
f (x) dx.
a
Para m y n enteros no negativos, encuentre k en función de m y n de modo
que f sea una distribución de probabilidad. En términos de estos k, m y n,
¿cúal es la probabilidad de que x sea menor o igual que 1/2?
Ejercicio 6.18. En un plano horizontal se trazan lı́neas paralelas separadas
entre sı́ 2 centı́metros. Si se lanza una aguja de 2 centı́metros de longitud
se puede demostrar que la probabilidad de que la aguja toque alguna recta de
esa familia es
Z
2 π/2
P =
sen θ dθ
π 0
donde θ es el ángulo entre la aguja y cualquiera de las rectas paralelas.
Calcule dicha probabilidad.
80
6 Aplicaciones de la integral definida
6.6 Otras aplicaciones
Ejercicio 6.19. La velocidad de escape v0 de la tierra es la mı́nima velocidad que permite a un objeto lanzado verticalmente, escapar el campo
gravitacional de la tierra. Si s = s(t) representa la distancia desde el centro
de la tierra al objeto en cuestión, el objeto se alejará continuamente de la
tierra siempre que la velocidad v = v(t) = s0 (t) sea siempre positiva:
v=
ds
> 0.
dt
De la ley de Gravitación de Newton (F = ma) sabemos que la aceleración
a(t) = v 0 (t) del objeto obedece:
dv
GM
=− 2
dt
s
donde G es la constante de gravitación y M es la masa de la tierra. Ahora
bien, por la regla de la cadena se tiene que
dv
dv ds
=
.
dt
ds dt
Concluya que
Z
Z
v dv = −GM
1
ds
s2
y que
r
2GM
R
donde R es el radio de la tierra. Recuerde v0 = v(0).
v0 >
Ejercicio 6.20. Se deja caer un objeto desde el reposo a 100 metros de
altura. Determine su posición en función del tiempo.
Ejercicio 6.21. Muestre la siguiente proposición hecha por Galileo Galilei:
“El tiempo en que cualquier distancia es recorrida por un móvil que parte
del reposo, y está acelerado uniformemente, es igual al tiempo que tardará
en caso de hacer ese recorrido con velocidad constante cuyo valor fuese la
mitad de la velocidad final alcanzada tras el recorrido acelerado.”
Ejercicio 6.22. La velocidad v del flujo de sangre a una distancia r del eje
central de una arteria de radio R viene dada por la relación
v = k(R2 − r2 )
donde k es una constante de proporcionalidad. Halle el flujo medio de sangre
a lo largo de un radio de la arteria.
Ejercicio 6.23. Halle la familia de funciones f cuya derivada es
p
f 0 (x) = x 1 − x2 .
¿Cúal es el único miembro que pasa por (0, 7/3)?
6 Aplicaciones de la integral definida
6.6 Otras aplicaciones
81
Ejercicio 6.24. Un tipo particular de ecuaciones diferenciales se caracteriza
por escribirse en la forma f 0 (t) = F (f )G(t). Por ejemplo, f 0 (t) = t2 f (t).
El método usual para solucionarlas recibe el nombre de variables separables
y se basa en el siguiente razonamiento:
Z
Z
df
df
df
= F (f )G(t) ⇒
= G(t) dt ⇒
= G(t) dt.
dt
F (f )
F (f )
Resuelva las ecuaciones diferenciales:
f (t)
,
3. f 0 (t) = et f (t).
t
Ejercicio 6.25. Un individuo infectado se introduce en una población de n
individuos susceptibles al contagio. Si x es el número de individuos contagiados en la comunidad para el tiempo t, el modelo de epidemia supone que
la enfermedad se extiende a un ritmo proporcional al producto del número
de los ya contagiados por el de los todavı́a sanos:
1. f 0 (t) = t2 f (t),
2. f 0 (t) =
dx
= k(x + 1)(n − x).
dt
Encuentre x en función de t.
Ejercicio 6.26. En el modelo logı́stico de población, el ritmo de crecimiento de una población p en función del tiempo t está descrita por la
relación:
dp
= kp(L − p).
dt
Aquı́ L representa un tope a la población impuesto por la capacidad de carga
del medio. Encuentre p en función de t y represente su respuesta con un
gráfico.
Ejercicio 6.27. En una reacción quı́mica, una unidad del compuesto Y y
una unidad del compuesto Z se convierten en una unidad del compuesto X.
Si x denota la cantidad de compuesto X formada y el ritmo de formación
de X es proporcional al producto de las cantidades aún no convertidas y de
Y y z de Z, se tiene que
dx
= k(y0 − x)(z0 − x)
dt
donde y0 y z0 denotan las cantidades iniciales de Y y Z. Encuentre x en
función de t. ¿Qué le sucede a x cuando t tiende a ∞?
Ejercicio 6.28. Si se pulsa una cuerda colocada tensa entre dos puntos
(0, 0) y (0, 2) desplazando su punto medio h unidades, el movimiento de la
cuerda viene dado por una “serie de Fourier” cuyos coeficientes son
Z 1
Z 2
nπx
nπx
bn = h
x sen
dx + h
(−x + 2) sen
dx.
2
2
0
1
Calcule bn .
82
6 Aplicaciones de la integral definida
6.6 Otras aplicaciones
Ejercicio 6.29. La fuente de aplicaciones para las integrales de Riemann
en el campo de la fı́sica clásica es prácticamente inagotable. Invitamos al
lector en este ejercicio a explorarlas. Algunos ejemplos son masa, centro de
gravedad, momento de inercia y trabajo.
Ejercicio 6.30. Más aplicaciones de las integrales se encuentran en la administración y la economı́a. En el estudio de las funciones de oferta y demanda, los coeficientes de desigualdad para distribuciones de ingreso, curvas
de aprendizaje, utilidades, superávit del consumidor y del producto, etc. En
este ejercicio se invita al lector a investigar todas estas aplicaciones.
83
7. Integración numérica
Que toda función continua sea integrable, no garantiza que seamos capaces de encontrar enR forma explı́cita una antiderivada para dicha función.
2
El ejemplo clásico es e−x dx. Hay situaciones que nos piden por lo menos
Rb
aproximar la cantidad a f (x) dx, aún cuando no seamos capaces de encontrar una primitiva para f . En esta sección exploramos en forma rápida
posibles caminos a seguir para obtener dicha aproximación.
7.1. Aproximaciones con sumas de Riemann. Las sumas de Riemann
Rb
brindan una excelente forma para aproximar a f . De hecho consideremos
la partición uniforme Pn del intervalo [a, b] dada por
a0 = a, a1 = a +
b−a
b−a
, . . . , an−1 = a + (n − 1)
, an = b.
n
n
Tomemos ahora la sumas superior U (f, Pn ) e inferior L(f, Pn ) para una
función continua f con respecto a la partición uniforme. Recuerde que
esto quiere decir que tomamos ξi , ηi ∈ [ai , ai+1 ] de modo tal que f (ξi ) =
sup{f (x) : x ∈ [ai , ai+1 ]} y f (ηi ) = inf{f (x) : x ∈ [ai , ai+1 ]}. Ası́
S(f, Pn ; {ξi }) = U (f, Pn )
y S(f, Pn , {ηi }) = L(f, Pn ).
Sabemos que
f (ξi )
Z
L(f, Pn ) ≤
b
f ≤ U (f, Pn ).
a
f (ξi )+f (ηi )
2
f (ηi )
ai
Z
b
ai+1
Si no tenemos razón alguna para
pensar que alguna de estas dos
sumas está más cerca a la integral deseada que la otra, podemos aproximar la integral con el
promedio de ambas, ası́
L(f, Pn ) + U (f, Pn )
2
n−1
n−1
X f (ξi ) + f (ηi )
b−aX
=
(ai1 − ai ) =
f (ξi ) + f (ηi ) .
2
2n
f (x) dx ∼
a
i=0
i=0
Evidentemente, hallar el máximo (supremo) o el mı́nimo (ı́nfimo) de una
función no siempre es fácil. Por lo cual la aproximación anterior no siempre
es manejable. En el caso particular en el cual la función es creciente (o
84
7 Integración numérica
7.1 Aproximaciones con sumas de Riemann
decreciente) tenemos que ξi = ai+1 y ηi = ai por lo cual
Z b
n−1
b−aX
f (x) dx ∼
f (ai+1 ) + f (ai )
2n
a
i=0
n−1
X
b−a
=
f (a) + 2
f (ai ) + f (b) .
2n
i=1
La pregunta natural es ¿qué tan buena es dicha aproximación?
Lema 7.1. Si f : [a, b] → R es continua y monótona en [a, b] entonces
Z b
U (f, Pn ) + L(f, Pn ) |f (b) − f (a)|(b − a)
.
f (x) dx −
≤
2
2n
a
Rb
Prueba: Dado que a f está entre L(f, Pn ) y U (f, Pn ) tenemos que
Z b
U (f, Pn ) + L(f, Pn ) 1
f (x) dx −
≤ U (f, Pn ) − L(f, Pn )
2
2
a
=
n−1
|f (b) − f (a)|(b − a)
b − a X
f (ai+1 ) − f (ai ) =
.
2n
2n
i=0
En la última identidad usamos la monotonicidad de f .
De este modo, entre mayor se elija n, mejor será la aproximación obtenida.
Con poco esfuerzo es posible reducir la hipótesis de continuidad.
2
Ejemplo 7.2. La función f (x) = e−x es decreciente en el intervalo [0, 1]
por lo cual
Z 1
−x2 , P ) + L(e−x2 , P ) −1
U
(e
2
n
n
−x
≤ 1−e < 1 .
e
dx −
2
2n
2n
0
f (ai )+f (ai+1 )
2
ai
Z
a
ai+1
b
Otra forma
R b obvia de tratar de
aproximar a f es considerando la
suma de Riemann que se obtiene
al tomar los puntos medios de los
intervalos [ai , ai+i ] de la partición
uniforme Pn . En tal caso
n
b−aX
1 b−a
f (x) dx ∼
f a+ i−
=: Mn (f ).
n
2
n
i=1
Básicamente, lo que estamos haciendo con dicha aproximación es sumando
las aproximaciones sobre los subintervalos
Z ai+1
b−a
ai + ai+1
f (x) dx ∼
f
.
(4)
n
2
ai
7 Integración numérica
7.1 Aproximaciones con sumas de Riemann
85
Teorema 7.3. Sea f : [a, b] → R una función tal que f, f 0 y f 00 son continuas
en [a, b]. Entonces existe c ∈ [a, b] para el cual
Z b
f 00 (c)(b − a)3
f (x) dx − Mn (f ).
=
24n2
a
Prueba: Por comodidad escribimos bi = (ai + ai+1 )/2 y h = (b − a)/n. Para
t ∈ [0, h/2] defina
Z bi +t
f (x) dx − 2tf (bi ).
gi (t) :=
bi −t
Note que para t = h/2 obtenemos el error cometido al usar la aproximación (4). Además gi (0) = 0 y gi0 (t) = f (bi + t) + f (bi − t) − 2f (bi ).
Por lo cual gi0 (0) = 0 y gi00 (t) = f 0 (bi + t) − f 0 (bi − t). Por último, gi00 (0) = 0
y gi000 (t) = f 00 (bi + t) + f 00 (bi − t).
Como f 0 es continua gi00 también lo es y por el teorema de valores intermedios existe ci,t entre 0 y t para el cual
gi00 (t) = gi00 (t) − gi00 (0) = gi000 (ci,t )(t − 0) = t f 00 (bi + ci,t ) + f 00 (bi − ci,t ) .
De este modo con A = min{f 00 (x) : x ∈ [a, b]} y B = max{f 00 (x) : x ∈ [a, b]},
2At ≤ gi00 (t) ≤ 2Bt.
Integrando dos veces entre 0 y t, tenemos
At2 ≤ gi0 (t) ≤ Bt2
y
At3
Bt3
≤ gi (t) ≤
.
3
3
Al tomar t = h/2 tenemos
Z ai+1
Ah3
Bh3
f (x) dx − hf (bi ) ≤
≤
.
24
24
ai
Sumando sobre i obtenemos que
Z b
B(b − a)3
A(b − a)3
≤
f
(x)
dx
−
M
(f
)
≤
.
n
24n2
24n2
a
Por el teorema de valores intermedios para f 00 obtenemos que existe c ∈ [a, b]
para el cual
Z b
f 00 (c)(b − a)3
=
f (x) dx − Mn (f )
24n2
a
lo cual concluye la demostración.
Corolario 7.4. Sea f : [a, b] → R una función tal que f, f 0 y f 00 son continuas en [a, b]. Entonces
Z b
(b − a)3
≤
f
(x)
dx
−
M
(f
)
max{|f 00 (x)| : x ∈ [a, b]}.
n
2
24n
a
86
7 Integración numérica
7.2 Aproximaciones de tipo geométrico
2
Ejemplo 7.5. De regreso a f (x) = e−x en [0, 1] tenemos que f 00 (x) =
2
e−x 4x2 − 2 . No es difı́cil verificar que |f 00 (x)| ≤ 2 para todo x ∈ [0, 1] por
lo cual
Z 1
1
−x2
e
dx − Mn (f ) ≤
12n2
0
lo cual mejora en mucho la aproximación del Ejemplo 7.2.
7.2. Aproximaciones de tipo geométrico. Hasta este momento, hemos
utilizado sumas de Riemann para aproximar el valor de la integral. Una
técnica diferente deja de lado las sumas de Riemann y busca aproximar la
integral desde un punto de vista más geométrico.
f (ai+1 )
f (ai )
ai
ai+1
La llamada regla del trapezoide
utiliza la lı́nea recta que une los puntos (ai , f (ai )) y (ai+1 , f (ai+1 )) para
aproximar la función f en el intervalo [ai , ai+1 ]. El área bajo la curva
se aproxima mediante el área de un
trapezoide de altura ai+1 −ai y bases
f (ai ) y f (ai+1 ).
De este modo, y utilizando de nuevo la partición uniforme Pn y h =
(b − a)/n tenemos
Z b
n−1
X (b − a) f (a + ih) + f (a + (i + 1)h)
f (x) dx ∼
2n
a
i=0
n−1
X
b−a
=
f (a) + 2
f (a + ih) + f (b) =: Tn (f ).
2n
i=1
Teorema 7.6. Sea f : [a, b] → R una función tal que f, f 0 y f 00 son continuas
en [a, b]. Entonces existe c ∈ [a, b] para el cual
Z b
f 00 (c)(b − a)3
=
T
(f
)
−
f (x) dx.
n
12n2
a
La demostración de este resultado sigue un razonamiento muy similar a
la demostración del Teorema 7.3 por lo que se deja como Ejercicio 7.1 para
el lector.
Corolario 7.7. Sea f : [a, b] → R una función tal que f, f 0 y f 00 son continuas en [a, b]. Entonces
Z b
(b − a)3
≤
f
(x)
dx
−
T
(f
)
max{|f 00 (x)| : x ∈ [a, b]}.
n
12n2
a
En principio, al usar los puntos medios, hemos obtenido un error que
es la mitad del error obtenido al utilizar la regla del trapezoide. Esto no
lo debemos tomar como un paso hacia atrás, pues lo que pretendemos es
7 Integración numérica
87
descubrir diferentes puntos de vista. El siguiente método, conocido como
regla de Simpson aproxima la función mediante parábolas y obtiene como
veremos, una aproximación mejor que las anteriores a cambio de pedir la
continuidad de la cuarta derivada.
En esta oportunidad vamos a considerar la partición uniforme Pn de [a, b]
para n = 2l par. De este modo, obtenemos l subintervalos dobles [a0 , a2 ],
[a2 , a4 ], . . . , [an−2 , an ] con puntos medios a1 , a3 , . . . , an−1 .
En cada subintervalo doble aproximamos la función f con la función
cuadrática qi que pasa por los puntos (a2i , f (a2i )), (a2i+1 , f (a2i+1 )) y
(a2i+2 , f (a2i+2 )).
a2i
Z
a2i+1
a2i+2
a2i+2
qi (x) dx =
a2i
En el Ejercicio 7.2 se pide al lector
mostrar que
b−a
(f (a2i ) + 4f (a2i+1 ) + f (a2i+2 )).
3n
De este modo
Z b
l−1
b−aX
f (x) dx ∼
(f (a2i ) + 4f (a2i+1 ) + f (a2i+2 ))
3n
a
i=0
l−1
l−1
l−2
X
X
X
b−a
f (a) +
f (a2i ) + 4
f (a2i+1 ) +
f (a2i+2 ) + f (b)
=
3n
i=1
i=0
i=0
l−1
l−1
X
X
b−a
=
f (a) + 2
f (a2i ) + 4
f (a2i+1 ) + f (b) =: Sn (f ).
3n
i=1
i=0
Teorema 7.8. Sea f : [a, b] → R una función tal que f, f 0 , f 00 , f 000 y f 0000 son
continuas en [a, b]. Entonces para n = 2l ∈ N par, existe c ∈ [a, b] para el
cual
Z b
f 0000 (c)(b − a)5
= Sn (f ) −
f (x) dx.
180n4
a
Prueba: Esta demostración sigue lı́neas muy similares a las demostraciones
de los dos teoremas anteriores, por lo cual, los detalles se dejan como Ejercicio 7.3 para el lector. Veamos un bosquejo.
Para i = 1, 2, . . . , l − 1 y h = (b − a)/n, sea bi = a + (2i + 1)h y defina
para t ∈ [0, h] las funciones
Z bi +t
t
gi (t) := f (bi − t) + 4f (bi ) + f (bi + t) −
f (x) dx.
3
bi −t
Es fácil verificar que gi (0) = gi0 (0) = gi00 (0) = 0 y que
t
gi000 (t) = f 000 (bi + t) − f 000 (bi − t) .
3
88
7 Integración numérica
7.2 Aproximaciones de tipo geométrico
Por el teorema del valor medio para f 000 , existe ci,t entre bi y t tal que
2t2 0000
f (ci,t ).
3
Si denotamos A = min{f 0000 (x) : x ∈ [a, b]} y B = max{f 0000 (x) : x ∈ [a, b]}
se tiene para t ∈ [0, h] y i = 0, 1, . . . , l − 1,
gi000 (t) =
2At2
2Bt2
≤ gi000 (t) ≤
.
3
3
Después de integrar tres veces se obtiene que
Bt5
At5
≤ gi (t) ≤
.
90
90
Tomando t = h y sumando estas l = n/2 desigualdades se tiene que
Z b
l−1
Ah5 n X
Bh5 n
f (x) dx ≤
≤
gi (h) = Sn −
.
180
180
a
i=0
El resultado sigue de la continuidad de f 0000 en [a, b] y de la definición de A
y B.
Corolario 7.9. Sea f : [a, b] → R una función tal que f, f 0 , f 00 , f 000 y f 0000
son continuas en [a, b]. Entonces para n ∈ N par
Z b
(b − a)5
≤
f
(x)
dx
−
S
(f
)
max{|f 0000 (x)| : x ∈ [a, b]}.
n
4
180n
a
7.2.1. Ejercicios.
Ejercicio 7.1. Para t ∈ [0, h] considere las funciones
Z ai +t
t
f (x) dx.
gi (t) := f (ai ) + f (ai + t) −
2
ai
Basado en la prueba del Teorema 7.3 y usando estas funciones gi demuestre
el Teorema 7.6.
Ejercicio 7.2. Muestre que la función cuadrática q que pasa por los puntos
(x − h, y1 ), (x, y2 ) y (x + h, y3 ) satisface
Z x+h
h
q(t) dt = (y1 + 4y2 + y3 ).
3
x−h
Ejercicio 7.3. Complete los detalles de la demostración del Teorema 7.8.
Ejercicio 7.4. Demuestre que si p es un polinomio de grado menor que o
igual a tres, las aproximaciones de Simpson son exactas.
Ejercicio 7.5. Muestre que
Mn (f ) + Tn (f )
T2n (f ) =
2
y que
S2n (f ) =
2Mn (f ) + Tn (f )
.
3
7 Integración numérica
7.2 Aproximaciones de tipo geométrico
89
R2
Ejercicio 7.6. Use el hecho que ln 2 = 1 1/x dx para aproximar dicho
número. ¿Qué tan grande es el error que obtuvo? Compare los diferentes
métodos. Aproxime dicho número con tres decimales correctos.
Sugerencia: recuerde que si dos expresiones decimales
a.a1 a2 · · · an an+1 an+2 · · ·
y
a.a1 a2 · · · an bn+1 bn+2 · · ·
comparten los primeros n dı́gitos después del punto decimal entonces
1
|a.a1 a2 · · · an an+1 an+2 · · · − a.a1 a2 · · · an bn+1 bn+2 · · · | ≤ n .
10
R1
2
−1
Ejercicio 7.7. Use el hecho que π/4 = 0 (1+x ) dx para aproximar dicho
número. ¿Qué tan grande es el error que obtuvo? Compare los diferentes
métodos. Aproxime dicho número con tres decimales correctos.
Ejercicio 7.8. Halle el error máximo posible de la aproximación de la integral
Z 1
1
dx
2
0 1+x
si se usa primero la regla trapezoidal y segundo la regla de Simpson.
Ejercicio 7.9. Aproxime las siguiente integrales y estime los respectivos
errores. Usar una calculadora o computadora será de mucha utilidad.
Z π/2
Z 1
Z π
√
sen x
dx,
3.
1.
cos(x2 ) dx,
2.
sen x dx,
x
0
0
0
Z
2
√
4.
0
Z
7.
0
2
√
Z
1
dx,
4 + x3
5.
1
dx,
1 + x4
8.
1
2
e−x dx,
0
Z
0
Z
6.
0
π/2
1
dx.
1 + sen x
1
1
dx,
1 + x3
90
8. Integrales dependientes de un parámetro
Es usual encontrar integrales de la forma
Z b
F (y) =
f (x, y) dx
a
donde la función f depende de dos variables x y y. El resultado, en caso de
existir, es nuevamente una función F (y), esta vez solo de la variable y a la
cual llamaremos parámetro. Los ejemplos son múltiples, para recordar uno
concreto podemos anotar
Z 1
ecx 1 ec − 1
cx
e dx =
=
,
∀ c 6= 0.
c 0
c
0
En esta sección estudiamos la integrabilidad, continuidad, y diferenciabilidad de esta nueva función F (y).
Para iniciar nuestro estudio debemos enunciar algunos conceptos básicos
para funciones de dos variables.
Definición 8.1. Una función f : [a, b] × [c, d] → R es continua en un
punto (x0 , y0 ) de su dominio si, para todo ε > 0 existe δ > 0 de modo que
si
p
(x − x0 )2 + (y − y0 )2 < δ
para (x, y) en el dominio de f , entonces
|f (x, y) − f (x0 , y0 )| < ε.
En el caso en que f sea continua en todo punto de su dominio decimos
simplemente que f es continua.
Nota. Si f : [a, b]×[c, d] → R, para cada x fijo en [a, b] se define una función
f (x, ·) : [c, d] → R mediante f (x, ·)(y) := f (x, y).
En modo similar, para cada y fijo en [c, d] se define una función
f (·, y) : [a, b] → R mediante f (·, y)(x) := f (x, y).
La función f es continua si y solo si cada f (x, ·) y f (·, y) es continua.
Más aún, es posible mostrar que si f : [a, b] × [c, d] → R es una función
continua entonces f es uniformemente continua, ası́ las tres funciones son
uniformemente continuas.
♦
Lema 8.2. Si f : [a, b] × [c, d] → R es una función continua entonces la
función F : [c, d] → R definida mediante
Z b
F (y) :=
f (x, y) dx
a
es continua.
8 Integrales dependientes de un parámetro
91
Prueba: Como f es uniformemente continua, para todo ε > 0 existe δ > 0
para el cual
|f (x, y) − f (x, y0 )| < ε,
∀ x ∈ [a, b], ∀ y, y0 ∈ [c, d] con |y − y0 | < δ.
De este modo
Z
b
|f (x, y) − f (x, y0 )| dx < ε(b − a).
|F (y) − F (y0 )| ≤
a
Esto demuestra que F es continua (y uniformemente continua) en [c, d]. Rd
De igual modo, la función G(x) := c f (x, y) dy es continua en [a, b].
Como toda función continua es integrable podemos considerar
Z b
Z b Z d
G(x) dx =
f (x, y) dy dx, y
a
Z
a
d
Z
c
d Z b
F (y) dy =
c
f (x, y) dx dy.
c
a
A dichas integrales les llamamos integrales iteradas. La pregunta natural es ¿son estas dos integrales iteradas iguales? La respuesta es sı́. Más
aún, podemos relajar la hipótesis de continuidad pedida a la función f y
aún ası́ obtener la misma conclusión. Para simplificar la presentación nos
conformamos con continuidad.
Teorema 8.3. Si f : [a, b] × [c, d] → R es continua entonces
Z b Z d
Z d Z b
f (x, y) dy dx =
f (x, y) dx dy.
a
c
c
a
Prueba: Como mencionamos antes, ambas integrales iteradas existen. Queremos mostrar que coinciden. Como la función f es uniformemente continua,
dado ε > 0, sabemos que existe δ > 0 para el cual se satisface
p
|f (x1 , y1 ) − f (x2 , y2 )| < ε siempre que (x1 − x2 )2 + (y1 − y2 )2 < δ.
Dividamos ambos intervalos en particiones {x0 , . . . , xn } y {y0 , . . . , yn } de
[a, b] y [c, d] respectivamente,
de modo tal que la longitud de cada subinter√
valo es menor que δ/ 2.
Escribimos
(Z
)
Z b Z d
n X
n Z xi
yj
X
f (x, y) dy dx =
f (x, y) dy dx,
a
Z
c
d Z
i=1 j=1
b
f (x, y) dx dy =
c
a
xi−1
n X
n Z yj
X
i=1 j=1
yj−1
yj−1
(Z
)
xi
f (x, y) dx dy.
xi−1
Como f (x, ·) es continua, existe tj ∈ [yj−1 , yj ] tal que
Z yj
f (x, y) dy = f (x, tj )(yj − yj−1 ).
yj−1
92
8 Integrales dependientes de un parámetro
Por la continuidad de f (·, tj ) existe si ∈ [xi−1 , xi ] tal que
Z xi
f (x, tj )(yj − yj−1 ) dx = f (si , tj )(xi − xi−1 )(yj − yj−1 ).
xi−1
De este modo, existen pi , si ∈ [xi−1 , xi ] y qj , tj ∈ [yj−1 , yj ] para i, j =
1, 2, . . . n tales que
Z b Z d
n X
n
X
f (x, y) dy dx =
f (si , tj )(xi − xi−1 )(yj − yj−1 ),
a
c
d Z
Z
i=1 j=1
b
f (x, y) dx dy =
c
n X
n
X
a
f (pi , qj )(xi − xi−1 )(yj − yj−1 ).
i=1 j=1
Por la continuidad uniforme de f concluimos que
Z b Z d
Z d Z b
f (x, y) dy dx −
f (x, y) dx dy ≤ ε(b − a)(d − c),
a
c
c
a
lo cual demuestra el resultado.
Ejemplo 8.4. Considere la función
3
(2x − y)ex
f (x) =
0
si 2x ≥ y,
si 2x < y,
definida en el conjunto [0, 1] × [0, 2]. Esta función es continua en su dominio,
¿por qué? De este modo tenemos la igualdad entre las integrales iteradas
Z 2 Z 1
Z 1 Z 2
f (x, y) dx dy =
f (x, y) dy dx.
0
0
0
Observe como para y fijo
Z 1
Z
f (x, y) dx =
0
0
1
3
(2x − y)ex dx
y/2
la cual no podemos calcular. Por otra parte, para x fijo
Z 2
Z 2x
y 2 2x
3
x3
x3
= 2x2 ex .
f (x, y) dy =
(2x − y)e dy = e
2xy −
2
0
0
0
Ası́
Z
1 Z 2
f (x, y) dy
0
0
Z
1
3
2x2 ex dx =
dx =
0
3
2ex 1 2(e − 1)
=
.
3 0
3
A continuación estudiamos la derivabilidad de la función
Z b
F (y) =
f (x, y) dx.
a
Para esto, necesitamos el concepto de derivada parcial el cual se estudia
en detalle en un curso de cálculo en varias variable. Por lo pronto nos
conformamos con la siguiente definición.
8 Integrales dependientes de un parámetro
93
Definición 8.5. Sea f : [a, b] × [c, d] → R una función para la cual f (x, ·) :
[c, d] → R es derivable en todo el intervalo [c, d] para cada x fijo en [a, b],
donde por supuesto consideramos solo derivadas laterales en c y d. A la
derivada
d
fy : [a, b] × [c, d] → R,
fy (x, y) :=
f (x, ·)(y)
dy
le llamamos la derivada parcial de f con respecto a y. En forma similar
se define la derivada parcial de f con respecto a x, fx .
Teorema 8.6. Si f : [a, b] × [c, d] → R y su derivada parcial fy : [a, b] ×
Rb
[c, d] → R son continuas entonces F (y) = a f (x, y) dx es derivable en [c, d]
y
Z b
d
F (y) =
fy (x, y) dx.
dy
a
Prueba: Queremos estudiar la diferencia
Z b
F (y) − F (y0 )
−
fy (x, y0 ).
y − y0
a
Observe que fy es uniformemente continua en [a, b] × [c, d]. Para ε > 0 sea
δ > 0 de la continuidad uniforme de fy . Para todo y, y0 ∈ [c, d] existe y1
entre y y y0 (el cual puede depender de x) de modo que f (x, y) − f (x, y0 ) =
(y−y0 )fy (x, y1 ). Tomando |y−y0 | < δ, por la continuidad de f y fy tenemos
que
f (x, y) − f (x, y0 )
= |fy (x, y1 ) − fy (x, y0 )| < ε.
−
f
(x,
y
)
y
0
y − y0
Esta desigualdad implica que
Z b
Z b
F (y) − F (y0 )
−
fy (x, y0 ) dx ≤
|fy (x, y1 ) − fy (x, y0 )| dx < ε(b − a),
y − y0
a
a
lo cual concluye el resultado.
Teorema 8.7. Sean f : [a, b] × [c, d] → R y su derivada parcial fy :
[a, b] × [c, d] → R funciones continuas. Sea β : [c, d] → [a, b] una función
diferenciable. Si F : [c, d] → R está definida mediante
Z β(y)
F (y) =
f (x, y) dx
a
entonces F (y) es diferenciable en [c, d] y
d
F (y) = f (β(y), y)β 0 (y) +
dy
Z
β(y)
fy (x, y) dx.
a
94
8 Integrales dependientes de un parámetro
Prueba: Queremos estudiar el lı́mite cuando h → 0 de la fracción
!
Z β(y+h)
Z β(y)
F (y + h) − F (y)
1
=
f (x, y + h) dx −
f (x, y) dx
h
h
a
a
!
Z β(y+h)
Z β(y)
1
f (x, y + h) dx .
=
f (x, y + h) − f (x, y) dx +
h
β(y)
a
Como fy es continua en la primera integral y f es continua en la segunda
integral, sabemos que existen y1 entre y y y + h y x1 entre β(y) y β(y + h)
tales que
Z β(y)
F (y + h) − F (y)
β(y + h) − β(y)
=
fy (x, y1 ) dx + f (x1 , y + h)
.
h
h
a
Al tomar el lı́mite cuando h → 0 en el segundo sumando obtenemos, por la
continuidad de f y la derivabilidad de β, f (β(y), y)β 0 (y). Por la continuidad
R β(y)
de fy el lı́mite cuando h → 0 en el primer sumando produce a fy (x, y) dx,
lo cual concluye el resultado.
Corolario 8.8. Sean f : [a, b] × [c, d] → R y su derivada parcial fy :
[a, b] × [c, d] → R funciones continuas. Sean α, β : [c, d] → [a, b] funciones
diferenciables. Si F : [c, d] → R está definida mediante
Z β(y)
F (y) =
f (x, y) dx
α(y)
entonces F (y) es diferenciable en [c, d] y
d
F (y) = f (β(y), y)β 0 (y) − f (α(y), y)α0 (y) +
dy
Z
β(y)
fy (x, y) dx.
α(y)
8.0.2. Ejercicios.
Ejercicio 8.1. Muestre que para a > 0 se tiene
Z 1
2
lim
ta ln2 t dt =
.
(a + 1)3
c→0+ c
Ejercicio 8.2. Sea f : [a, b] × [c, d] → R una función continua y sea g :
[a, b] → R una función integrable. Muestre que
Z b
F (y) :=
g(x)f (x, y) dx
a
es continua en [c, d].
Ejercicio 8.3. Sea f : [0, 1] × [0, 1] → R la función definida por
sen tx
si x 6= 0,
x
f (x, t) =
t
si x = 0.
Verifique el Teorema 8.6 para esta función.
8 Integrales dependientes de un parámetro
95
Ejercicio 8.4. Encuentre una función continua f que satisface
Z x
Z 1
f (t) dt =
f (t) dt,
0
x
para todo x ∈ [0, 1].
Ejercicio 8.5. ¿Para qué valores de la constante A existe una función continua f que satisface la ecuación integral
Z x
f (t)et dt = (1 + x2 )ex ,
A+
0
para todo x ∈ R?
Ejercicio 8.6. ¿Para qué valores de la constante A existe una función continua f que satisface para todo x > 0 la siguiente ecuación integral?
Z 1/x
A
f (t)etx dt = 2 .
x
0
Ejercicio 8.7. Defina para todo x ∈ R las funciones
Z x
2
Z 1 −x2 (t2 +1)
e
−t2
f (x) :=
e dt ,
g(x) :=
dt.
t2 + 1
0
0
a. Muestre que f 0 (x) + g 0 (x) = 0, para todo x ∈ R. Concluya que
f (x) + g(x) = π/4, para todo x ∈ R.
b. Muestre que
√
Z x
π
−t2
e dt =
lim
.
x→∞ 0
2
Ejercicio 8.8. Considere la función
5/2
(x2 − y)e−y
f (x, y) =
0
si x2 ≤ y,
si x2 > y,
definida en el conjunto [0, 1] × [0, 1]. Muestre la igualdad entre las integrales
iteradas
Z 1 Z 1
Z 1 Z 1
f (x, y) dy dx =
f (x, y) dx dy
0
y calcule su valor.
0
0
0
96
9. Sucesiones de funciones
Iniciamos ahora el estudio de las sucesiones de funciones. Como requisito
indispensable, el lector debe dominar la teorı́a correspondiente a sucesiones
numéricas.
Una función en el sentido matemático, va más allá de una relación de la
forma y = f (x) usada comúnmente. Una función requiere de dos conjuntos
A y B (con B diferente de vacı́o), donde al primer conjunto le llamamos
dominio y al segundo codominio. Además la función determina una relación
entre todos los elementos de A y algunos de los elementos de B. En forma
folklórica es común decir que una función de A en B es una regla que asocia
a cada elemento de A un único elemento de B. Formalmente, podemos crear
un subconjunto f de A × B exigiendo dos condiciones:
(1) para todo a ∈ A existe b ∈ B con (a, b) ∈ f ;
(2) si (a, b) y (a, b0 ) están en f entonces b = b0 .
De este modo, la función queda determinada por el trı́o (A, B, f ) el cual es
comúnmente denotado f : A → B.
Ahora bien, haciendo uso de esta definición, funciones que en principio se
verı́an iguales, deben ser diferentes. Por ejemplo:
f : R → R,
x 7→ x2
f : [0, ∞[→ R,
x 7→ x2
f : [0, ∞[→ [0, ∞[,
x 7→ x2
f : R → [0, ∞[.
x 7→ x2
De este modo, para evitar complicaciones innecesarias, en esta sección
nos limitaremos a estudiar familias de funciones (fn )n∈N que comparten el
mismo dominio A ⊆ R y el mismo codominio B = R. Para cada n ∈ N
existe un único miembro de la familia fn que corresponde a dicho ı́ndice n.
Dicha familia recibe el nombre de sucesión de funciones.
Nuestra “función lı́mite” no tiene por que estar definida en la totalidad de
A por lo que vamos a permitir que dicha “función lı́mite” posea un dominio
posiblemente más chico A0 ⊆ A. Veamos, si x ∈ A entonces es evidente que
la sucesión (fn (x))n es una sucesión de números reales, por lo cual puede
converger ó puede divergir. En caso de convergencia, existe un único lı́mite
en R el cual depende sólo de x, y que podemos denotar f (x). Ası́ pues, el
conjunto A está dividido en dos partes. Aquellos x para los que f (x) tiene
sentido y aquellos x para los que la sucesión (fn (x))n diverge. Denotando
la primera porción mediante A0 obtenemos una función f : A0 ⊆ A → R de
modo tal que para todo x ∈ A0 la sucesión (fn (x))n converge al valor f (x).
Nuestro principal objetivo en esta sección es determinar en que casos es
posible heredar propiedades de una colección de funciones (fn )n∈N a una
“función lı́mite” f . Por ejemplo, continuidad, diferenciabilidad e integrabilidad.
9.1. Convergencia puntual y uniforme.
Definición 9.1. Sea fn : A ⊆ R → R una sucesión de funciones y sea
f : A0 ⊆ A → R una función tal que para todo x ∈ A0 la sucesión fn (x) n
9 Sucesiones de funciones
9.1 Convergencia puntual y uniforme
97
converge al valor f (x). En este caso decimos que la sucesión (fn )n converge
puntualmente a f en A0 .
Es usual denotar fn → f en A, ó f = lim fn en A.
Nota. Observe que en la definición anterior, si A00 ⊆ A0 y consideramos
la nueva función g : A00 → R definida mediante g(x) = f (x) para todo
x ∈ A00 ⊆ A0 entonces la sucesión (fn )n converge puntualmente a g en A00 .
Para evitar dicha situación, es usual requerir en la definición anterior el más
grande subconjunto A0 de A con dicha propiedad.
♦
Ejemplos 9.2. (1) fn (x) = x/n para n = 1, 2, . . . y x ∈ R. Evidentemente
lim fn = 0, la función constante 0 de R a R.
(2) fn : R → R, fn (x) = xn . Note que si |x| > 1 la sucesión xn no es
acotada por lo cual es divergente. La sucesión fn (−1) = (−1)n diverge
pues alterna valores 1 y −1. Por último, si |x| < 1 es posible verificar que
xn → 0 conforme n → ∞. Por lo tanto (fn )n converge a f en ] − 1, 1] donde
f :] − 1, 1] → R con f (x) = 0 si −1 < x < 1 y f (1) = 1.
El ejemplo anterior evidencia como el lı́mite de funciones continuas no es
necesariamente una función continua.
Definición 9.3. Sean fn : A ⊆ R → R. Decimos que la sucesión (fn )n es
uniformemente acotada en [a, b] si existe B ∈ R tal que |fn (x)| ≤ B para
todo x ∈ [a, b] y todo n ∈ N.
Lema 9.4. Sea fn : [a, b] → R una sucesión de funciones uniformemente
acotada en [a, b] que converge puntualmente en [a, b] a una función f . Defina
las funciones
gn (x) := inf{fk (x) : k ≥ n}
y
hn (x) := sup{fk (x) : k ≥ n}.
Entonces ambas sucesiones gn y hn convergen puntualmente a f en [a, b].
Prueba: Por ser la sucesión de las fn uniformemente acotada, tiene sentido
definir las funciones gn y hn . De este modo, para todo x ∈ [a, b]
g1 (x) ≤ · · · ≤ gn (x) ≤ · · · ≤ hn (x) · · · ≤ h1 (x),
gn (x) ≤ fk (x) ≤ hn (x),
y
∀k ≥ n.
(5)
De (5) concluimos que (gn (x))n y (hn (x))n son ambas sucesiones convergentes. Es decir existen funciones g y h en [a, b] tales que gn converge a g y
hn converge a h, ambas puntualmente en [a, b]. Veamos que g = f = h.
Si por contradicción existe x ∈ [a, b] para el cual g(x) 6= f (x) entonces
por convergencia, para ε = |g(x) − f (x)| > 0 existe K ∈ N tal que
|fn (x) − f (x)| < ε/3,
|gn (x) − g(x)| < ε/3,
Por ser gK un ı́nfimo, existe k ≥ K tal que
gK (x) ≤ fk (x) < gK (x) + ε/3.
∀n ≥ K.
98
9 Sucesiones de funciones
9.1 Convergencia puntual y uniforme
Por (5) tenemos que
gk (x) ≤ fk (x) < gk (x) + ε/3.
Ası́
ε = |g(x) − f (x)| ≤ |g(x) − gk (x)| + |gk (x) − fk (x)| + |fk (x) − f (x)| < ε
lo cual es una clara contradicción. De este modo g = f , y en forma similar
h = f.
Nota. Observe que la Definición 9.1 es equivalente a lo siguiente. Una
sucesión de funciones fn : A ⊆ R → R converge puntualmente a una función
f : A0 ⊆ A → R si para todo ε > 0 y todo x ∈ A0 existe K = K(x, ε) ∈ N
tal que si n ≥ K entonces |fn (x) − f (x)| < ε.
♦
Es importante observar como en la nota anterior el valor de K depende de
ambos ε y x, por ejemplo considere la sucesión fn (x) = x/n la cual converge
a la función constante 0. Si ε = 1 entonces |x/n − 0| < ε sólo si |x| < n. De
donde K = 2 funciona para cualquier x ∈] − 2, 2[ pero no para x ≥ 2.
Aquellas sucesiones de funciones para las cuales el valor de K depende
sólamente del valor de ε y no de el valor de x se dicen ser uniformemente
convergentes en A0 .
Definición 9.5. Una sucesión de funciones fn : A ⊆ R → R converge
uniformemente a una función f : A0 ⊆ A → R si para todo ε > 0 existe
K = K(ε) ∈ N tal que si n ≥ K entonces |fn (x) − f (x)| < ε para todo
x ∈ A0 .
Ejemplo 9.6. Basta notar que
sen(nx + n) 1
≤
n
n
para concluir que limn sen(nx + n) /n = 0 uniformemente en R.
Definición 9.7. Si una función f es acotada en un conjunto no vacı́o A
entonces tiene sentido considerar la cantidad
||f ||A := sup{|f (x)| : x ∈ A}.
A tal número le llamaremos norma superior de f en A (por razones que
serán más claras en cursos más avanzados).
Proposición 9.8. Una sucesión de funciones acotadas fn : A ⊆ R →
R converge uniformemente a una función f : A0 ⊆ A → R si y sólo si
||fn − f ||A0 → 0.
Prueba: Sin pérdida de generalidad, vamos a asumir que A0 = A. Si fn
converge uniformemente a f en A entonces para todo ε > 0 existe K ∈ N
tal que si n ≥ K se tiene
|fn (x) − f (x)| < ε para todo x ∈ A.
9 Sucesiones de funciones
9.1 Convergencia puntual y uniforme
99
Se concluye que ||fn − f ||A = sup{|fn (x) − f (x)| : x ∈ A} ≤ ε y ası́ hemos
mostrado que fn → f uniformemente en A implica ||fn − f ||A → 0.
El recı́proco se deja como Ejercicio 9.7 para el lector.
Nota. En particular, al tomar n = K en la demostración anterior
−ε + fK (x) < f (x) < ε + fK (x),
por lo cual f (x) también es acotada en A.
Observe como este es el primer ejemplo de una propiedad de la familia fn
(ser acotada) que se ha heredado a la función lı́mite f .
♦
Ejemplo 9.9. La sucesión de funciones fn : [−1, 1] → R definida mediante
fn (x) = x/n converge uniformemente a la función constante 0 en [−1, 1]
pues
1
||fn − 0||[−1,1] = sup{|x/n| : −1 ≤ x ≤ 1} = → 0.
n
Ejemplo 9.10. Sea fn (x) := xn (1 − x) definida en A = [0, 1]. No es difı́cil
mostrar que fn (x) converge puntualmente a la función constante 0 en A.
Además
fn0 (x) = xn−1 n − (n + 1)x = 0
indica que fn alcanza un máximo en x = n/(n + 1) en [0, 1] pues se tiene
fn00 (n/(n + 1)) < 0. De este modo
1 −n 1
0
nn
= 1+
→ = 0.
||fn −0||[0,1] = fn (n/(n+1)) =
n
(n + 1) (n + 1)
n
n+1
e
Por lo tanto, la convergencia es también uniforme en [0, 1].
Teorema 9.11. Criterio de Cauchy para la convergencia uniforme.
Una sucesión de funciones acotadas fn : A ⊆ R → R converge uniformemente en A a una función acotada f : A → R si y sólo si para todo ε > 0
existe K = K(ε) ∈ N tal que para todo m, n ∈ N con m ≥ n ≥ K se tiene
||fm − fn ||A ≤ ε.
Prueba: Suponga primero que fn converge a f uniformemente en A. De este
modo para ε > 0 existe K(ε/2) ∈ N de modo tal que si n ≥ K(ε/2) se tiene
que ||fn − f ||A < ε/2. Al tomar m ≥ n ≥ K(ε/2) tenemos que
|fm (x)−fn (x)| ≤ |fm (x)−f (x)|+|fn (x)−f (x)| ≤ ||fm −f ||A +||fn −f ||A < ε.
De este modo ||fm − fn ||A ≤ ε siempre que m ≥ n ≥ K(ε/2).
Para el recı́proco, suponga que dado ε > 0 existe K(ε) > 0 para el cual
siempre que m ≥ n ≥ K(ε) se tiene que ||fm − fn ||A ≤ ε. De este modo
|fm (x) − fn (x)| ≤ ε para todo x ∈ A y todo m ≥ n ≥ K(ε) (¿porqué?). Ası́,
para todo x ∈ A la sucesión (fn (x))n es una sucesión de Cauchy por lo cual
converge a un punto f (x) ∈ R. Por la unicidad del lı́mite, la función f está
bien definida en todo A y es una función acotada (¿porqué?). Además, al
tomar m → ∞ en la desigualdad |fm (x) − fn (x)| ≤ ε, por la continuidad
100
9 Sucesiones de funciones
9.2 Convergencia puntual y uniforme
del valor absoluto se concluye que |f (x) − fn (x)| ≤ ε, para n ≥ K(ε) y todo
x ∈ A de donde se sigue que fn converge uniformemente a f en A.
Para terminar esta sección vamos a presentar un resultado que permite
concluir la convergencia uniforme apartir de otras hipótesis.
Lema 9.12. Sea (fn ) una sucesión monótona de funciones continuas:
f1 (x) ≥ f2 (x) ≥ · · · ≥ fn (x) ≥ · · · , ó f1 (x) ≤ f2 (x) ≤ · · · ≤ fn (x) ≤ · · · ,
para todo x, que converge en cada punto de un intervalo cerrado y acotado
[a, b] a una función continua f . Entonces la convergencia es uniforme en
[a, b].
Prueba: Suponemos que la sucesión de las fn es creciente. El caso decreciente se resuelve al multiplicar por −1. Como se quiere mostrar convergencia uniforme, basta con mostrar que la sucesión de supremos Mn :=
sup{f (x) − fn (x) : x ∈ [a, b]} tiende a 0. Por hipótesis, la sucesión de los
Mn es decreciente y no negativa, por lo cual es convergente.
Por la hipótesis de continuidad, para cada n ∈ N existe un xn ∈ [a, b] tal
que Mn = f (xn ) − fn (xn ). Ahora, como la sucesión (xn )n es acotada posee
una subsucesion convergente, digamos xnk → x, para algún x en [a, b].
Como la sucesión (fnk (xnk ))k es acotada, existe a su vez una subsucesión
convergente, digamos fnkl (xnkl ) → y, para algún y en R.
Sin pérdida de generalidad podemos tomar xn = xnkl dado que basta con
mostrar que la subsucesión Mnkl converge a 0.
En resumen, usando la continuidad de las funciones involucradas:
fn (xn ) → y,
xn → x,
f (xn ) → f (x)
y fm (xn ) → fm (x), ∀m ∈ N.
Donde además tenemos que f (x) ≥ y pues
f (x) = lim f (xn ) ≥ lim fn (xn ) = y.
n→∞
n→∞
Si f (x) = y entonces Mn = f (xn ) − fn (xn ) → f (x) − y = 0 y listo.
Supongamos por contradiccion que f (x) > y y tomemos ε = (f (x) − y)/4.
Entonces existe N ∈ N tal que f (x) − fn (x) < ε para todo n ≥ N .
Si fijamos N , existe M ∈ N tal que |fN (x) − fN (xn )| < ε para todo
n ≥ M . Ahora para n ≥ N y n ≥ M :
|f (x) − fn (xn )| ≤ |f (x) − fN (x)| + |fN (x) − fN (xn )| + fn (xn ) − fN (xn )
< 2ε + f (xn ) − fN (xn )
donde usamos la hipótesis (fn )n creciente. Al tomar n → ∞
4ε = f (x) − y ≤ 2ε + f (x) − fN (x) < 3ε,
lo cual es una contradicción.
9 Sucesiones de funciones
9.3 Derivabilidad de la función lı́mite
101
9.2. Continuidad de la función lı́mite. Es fácil ver (Ejercicio 9.4) como
la sucesión de funciones fn (x) = xn definidas en el intervalo [0, 1] converge
puntualmente a la función f donde f (x) = 0 si 0 ≤ x < 1 y f (1) = 1.
De este modo, la función lı́mite de una sucesión de funciones continuas no
es necesariamente continua. La observación clave es el hecho que dicha
convergencia no es uniforme. A continuación vamos a mostrar que dicha
condición es suficiente para garantizar la continuidad de la función lı́mite.
Teorema 9.13. Continuidad de la función lı́mite. Sea (fn )n una
sucesión de funciones continuas en un conjunto A ⊆ R que converge uniformemente en A a una función f : A → R. Entonces f es continua en
A.
Prueba: Sea a ∈ A, veamos que f es continua en a. Sea ε > 0, como
la convergencia es uniforme, existe K = K(ε/3) ∈ N tal que si n ≥ K
entonces |fn (x) − f (x)| < ε/3 para todo x ∈ A. Como fK es continua, existe
δ = δ(ε/3) > 0 tal que si |x − a| < δ entonces |fK (x) − fK (a)| < ε/3. De
este modo, siempre que |x − a| < δ en A se tiene que
|f (x) − f (a)| ≤ |f (x) − fK (x)| + |fK (x) − fK (a)| + |fK (a) − f (a)| < ε.
Por lo cual f es continua en a y se obtiene el resultado.
9.3. Derivabilidad de la función lı́mite. No es cierto en general que
el lı́mite uniforme de funciones derivables sea derivable. La sucesión de
funciones fn (x) = xn definidas en el intervalo [0, 1] converge puntualmente a
la función f donde f (x) = 0 si 0 ≤ x < 1 y f (1) = 1. En este caso, la función
lı́mite de una sucesión de funciones derivables no es necesariamente derivable. Un ejemplo famoso pero no trivial está dado por las sumas parciales
n
X
2−k cos(3k x).
fn (x) =
k=0
Cada una de estas funciones es derivable como suma finita de funciones
derivables. Weierstrass demostró que esta sucesión de funciones converge
uniformemente a una función lı́mite que es continua en todo punto de R
pero que no es derivable en ningún punto.
A continuación presentamos un resultado, el cual nos permite concluir la
derivabilidad de la función lı́mite bajo ciertas condiciones extras. Véase el
Ejercicio 9.32
Teorema 9.14. Derivabilidad de la función lı́mite. Sea fn : [a, b] → R
una sucesión de funciones derivables en el intervalo cerrado y acotado [a, b]
tal que la sucesión de derivadas (fn0 )n converge uniformemente a una función
g en [a, b]. Suponga que para algún x0 ∈ [a, b] la sucesión (fn (x0 ))n es convergente. Entonces la sucesión de funciones (fn )n converge uniformemente
a una función f en [a, b]. Más aún, la función f es derivable en [a, b] y
f 0 = g. Es decir (limn fn )0 = limn fn0 .
102
9 Sucesiones de funciones
9.4 Derivabilidad de la función lı́mite
Prueba: Sea x ∈ [a, b]. Por ser las funciones fm y fn derivables, existe y
(que depende de m y n) en el intervalo formado por x y x0 de modo que
0
fm (x) − fn (x) = fm (x0 ) − fn (x0 ) + (x − x0 ) fm
(y) − fn0 (y) .
De este modo
0
|fm (x) − fn (x)| ≤ |fm (x0 ) − fn (x0 )| + (b − a)||fm
− fn0 ||[a,b] .
y entonces
0
||fm − fn ||[a,b] ≤ |fm (x0 ) − fn (x0 )| + (b − a)||fm
− fn0 ||[a,b] .
Como la sucesión (fn (x0 ))n es convergente y los fn0 convergen uniformemente, se concluye que los fn también convergen uniformemente a una
función f , digamos.
Observe que como las fn son continuas y la convergencia es uniforme, la
función f es continua en [a, b]. Debemos mostrar ahora que f es derivable
en [a, b] y que f 0 = g.
Sea c un punto arbitrario en [a, b]. Para cualquier x ∈ [a, b] existe z (que
depende de m y n) en el intervalo formado por x y c de modo que
0
fm (x) − fn (x) = fm (c) − fn (c) + (x − c) fm
(z) − fn0 (z) .
Ası́ si x 6= c se tiene que
fm (x) − fm (c) fn (x) − fn (c) 0
≤ ||fm
−
− fn0 ||[a,b] .
x−c
x−c
Como la convergencia de los fn0 es uniforme, dado ε > 0 existe K ∈ N de
modo tal que si m ≥ n ≥ K y x 6= c entonces
fm (x) − fm (c) fn (x) − fn (c) ≤ ε.
−
x−c
x−c
Por la continuidad del valor absoluto, y como los fm convergen a f al tomar
m → ∞ se concluye que
f (x) − f (c) fn (x) − fn (c) ≤ ε,
−
x−c
x−c
siempre que n ≥ K y x 6= c. Ahora bien
f (x) − f (c)
≤
−
g(c)
x−c
f (x) − f (c) fn (x) − fn (c) fn (x) − fn (c)
0
+
−
− fn (c) + fn0 (c) − g(c).
x−c
x−c
x−c
Queda como Ejercicio 9.31 para el lector concluir que f es derivable en c y
que precisamente f 0 (c) = g(c).
Como el punto c fue arbitrariamente elegido en [a, b] se tiene que f es
derivable en [a, b] y que f 0 = g.
9 Sucesiones de funciones
9.4 Integrabilidad de la función lı́mite
103
9.4. Integrabilidad de la función lı́mite. En esta sección estudiamos la
integrabilidad de la función lı́mite y la relación entre la integral del lı́mite y
el lı́mite de las integrales. Iniciamos la motivación con unos ejemplos.
Ejemplo 9.15. Considere la sucesión de funciones fn : [0, 1] → R con n ≥ 2
definida mediante
n2 x, 0 ≤ x ≤ 1/n,
2
−n (x − 2/n), 1/n ≤ x ≤ 2/n,
fn (x) :=
0, 2/n ≤ x ≤ 1.
El gráfico de cada fn es un triángulo con vértices en los puntos (0, 0), (1/n, n)
y (2/n, 0). De este modo, como la integral de una función positiva es precisamente el área bajo la curva tenemos que
Z 1
fn (x) dx = 1.
0
No es difı́cil verificar que fn (x) → 0 para todo x ∈ [0, 1] por lo cual
Z 1
Z 1
1 = lim
fn (x) dx 6=
lim fn (x) dx = 0.
n
0
0
n
Ejemplo 9.16. Considere la sucesión de funciones gn : [0, 1] → R definida
2
mediante gn (x) := 2nxe−nx . Observe que gn (x) = h0n (x) donde hn (x) =
2
−e−nx . Ası́
Z 1
Z 1
gn (x) dx =
h0n (x) dx = hn (1) − hn (0) = −e−n + 1 → 1.
0
0
Como gn (x) → 0 para todo x ∈ [0, 1] nuevamente tenemos que
Z 1
Z 1
0=
lim gn (x) dx 6= lim
gn (x) dx = 1.
0
n
n
0
Ejemplo 9.17. Considere la sucesión de funciones en [0, 1] definidas mediante
1 si x = m/k, con (m, k) = 1, k ≤ n, k ∈ N,
fn (x) :=
0 si no.
Como cada fn posee solo una cantidad
finita de discontinuidades, cada fn es
R1
Riemann integrable en [0, 1] con 0 fn = 0. Las fn convergen puntualmente
(y en forma creciente) a la función de Dirichlet en [0, 1] la cual no es Riemann
integrable.
Teorema 9.18. Integrabilidad de la función lı́mite. Sea fn : [a, b] → R
una sucesión de funciones integrables que convergen uniformemente a una
función f en [a, b]. Entonces f es Riemann integrable en [a, b] y se tiene
que
Z b
Z b
Z b
f (x) dx =
lim fn (x) dx = lim
fn (x) dx.
a
a
n
n
a
104
9 Sucesiones de funciones
9.4 Integrabilidad de la función lı́mite
Prueba: Sea ε > 0. Dado que la convergencia es uniforme se tiene que existe
K = K(ε) tal que si n ≥ K entonces para todo x ∈ [a, b] tenemos que
|f (x) − fn (x)| ≤ ||f − fn ||[a,b] < ε.
Como fK es Riemann integrable, por el Criterio de Riemann existe una
partición Pε de [a, b] tal que si P = {a0 ≤ a1 ≤ · · · ≤ an } es un refinamiento
de Pε entonces
n−1
X
(MK,i − mK,i )(ai+1 − ai ) < ε
i=0
donde MK,i = sup{fK (x) : x ∈ [ai , ai+1 ]} y mK,i = inf{fK (x) : x ∈
[ai , ai+1 ]} para todo i = 0, 1, . . . , n − 1.
Sean Mi = sup{f (x) : x ∈ [ai , ai+1 ]} y mi = inf{f (x) : x ∈ [ai , ai+1 ]}
para todo i = 0, 1, . . . , n − 1. Como −ε + fK (x) < f (x) < fK (x) + ε para
todo x ∈ [a, b] tenemos que
Mi ≤ MK,i + ε
y
mi ≥ mK,i − ε.
De este modo
n−1
X
n−1
X
i=0
i=0
(Mi − mi )(ai+1 − ai ) ≤
(MK,i − mK,i + 2ε)(ai+1 − ai ) < ε + 2ε(b − a).
Del Criterio de Riemann se concluye que f es Riemann integrable en [a, b].
Por último
Z b
Z b
f (x) − fn (x) dx ≤ ||f − fn ||[a,b] (b − a)
f (x) − fn (x) dx ≤
a
a
donde el lado derecho tiende a 0 conforme n tiende a infinito, lo cual muestra
la identidad deseada.
El resultado anterior tiene dos partes, en la primera se concluye la integrabilidad de la función lı́mite. Como hemos aprendido en los ejercicios
anteriores, verificar la convergencia uniforme de funciones puede ser, en algunos casos, más que laborioso. En la segunda parte, se concluye que se
puede intercambiar el lı́mite con el signo integral.
Respecto a este intercambio, el siguiente resultado relaja la hipótesis de
convergencia uniforme, a cambio de exigir que la sucesión de funciones fn sea
monóntona, que cada fn sea continua y que la función lı́mite sea continua.
Lema 9.19. de convergencia monótona. Sea fn : [a, b] → R una
sucesión monótona de funciones continuas que converge puntualmente en
[a, b] a una función continua f . Entonces
Z b
Z b
Z b
f (x) dx =
lim fn (x) dx = lim
fn (x) dx.
a
a
n
a
La demostración es un resultado inmediato apartir de la convergencia
uniforme establecida en el Lema 9.12.
9 Sucesiones de funciones
9.5 Aproximación de funciones continuas
105
Ejemplo 9.20. Considere la sucesión de funciones fn en [0, 1] del Ejemplo 9.17. La sucesión de las fn es uniformemente acotada, y monótona,
f1 ≤ f2 ≤ · · · ≤ fn · · · . Sin embargo, las fn convergen puntualmente a
la función de Dirichlet en [0, 1] la cual no es continua (ni Riemann integrable). Este ejemplo demuestra que la hipótesis f continua (aún Riemann
integrable) en el Teorema 9.19 es indispensable.
Más aún, sup{fk (x) : k ≥ n} es precisamente la función de Dirichlet. Por
lo tanto, que una sucesión de funciones integrables que convergen puntualmente a una función f , sea monótona o uniformemente acotada en [a, b], no
garantiza que la función lı́mite sea Riemann integrable.
En particular, las funciones definidas en el Lema 9.4 no tiene que ser
integrables.
Nota. La integral de Riemann no es la única integral que existe. Quizá
las más útil de las integrales es la conocida como integral de Lebesgue. La
familia de funciones Lebesgue integrables incluye pero no se limita a las
funciones Riemann integrables.
Una de las ventajas del estudio de la integral de Lebesgue es que permite
prescindir de la hipótesis de continuidad en la función lı́mite, al estudiar la
integrabilidad de la función lı́mite, y obtener la integrabilidad de la función
lı́mite como consecuencia de la integrabilidad de las funciones fn .
Esta hipótesis se puede relajar al estudiar la Integral de Lebesgue, para la
cual, la familia de funciones integrables es mayor. En particular la función
de Dirichlet es Lebesgue integrable en [0, 1].
♦
9.5. Aproximación de funciones continuas. En esta sección vamos a
aproximar funciones continuas en forma uniforme mediante funciones más
sencillas. Dicha idea encontrará múltiples aplicaciones en el futuro.
Definición 9.21. Una función g : A ⊆ R → R se dice ser escalonada si
para cada intervalo compacto [a, b] ⊆ A, la función g posee una cantidad
finita de discontinuidades en los puntos x1 , x2 , . . . , xn ∈ [a, b] de modo tal
que g es constante en cada intervalo abierto ]xi , xi+1 [.
Por ejemplo, la función signo definida mediante
1, x > 0,
0, x = 0,
signo(x) :=
−1, x < 0.
es una función escalonada.
Teorema 9.22. Sea f : [a, b] → R una función continua. Entonces existe
una sucesión de funciones escalonadas fn : [a, b] → R que converge uniformemente a f en [a, b].
106
9 Sucesiones de funciones
9.5 Aproximación de funciones continuas
Prueba: Como f es continua en un intervalo cerrado y acotado, f es uniformemente continua. Ası́ para cada n ∈ N con n 6= 0 existe δ = δ(n) > 0
tal que si |x − y| < δ en [a, b] entonces |f (x) − f (y)| < 1/n.
Divida [a, b] en una cantidad finita de intervalos con puntos extremos
a = an,0 < an,1 < · · · < an,m = b de modo tal que an,i+1 − an,i < δ
para todo i = 0, . . . , m. Ahora defina la función escalonada fn mediante
fn (x) := f (an,i ) si an,i ≤ x < an,i+1 y fn (b) = f (an,m ). De este modo si
x ∈ [a, b] entonces x ∈ [an,i , an,i+1 ] para algún ı́ndice i y ası́
|fn (x) − f (x)| = |f (an,i ) − f (x)| < 1/n.
De lo anterior se tiene que ||fn − f ||[a,b] → 0 y se obtiene el resultado.
En el siguiente resultado aproximamos funciones continuas en forma uniforme mediante funciones continuas más sencillas. Antes ocupamos una
definición.
Definición 9.23. Una función g : [a, b] → R se dice ser lineal por partes
si existen puntos a = a0 < a1 < · · · < an = b de modo tal que en cada
intervalo ]ai , ai+1 [ la función g tiene la forma g(x) = Ai x + Bi para todo
i = 0, 1, . . . , n − 1.
En nuestra definición de función lineal por partes no exigimos ninguna
condición a los valores g(ai ). Un caso particular y de mucha utilidad es
cuando dicha función es continua. Evidentemente, los Ai , Bi y los g(ai )
deben elegirse apropiadamente.
Teorema 9.24. Sea f : [a, b] → R una función continua. Entonces existe
una sucesión de funciones continuas lineales por partes fn : [a, b] → R que
converge uniformemente a f en [a, b].
La prueba sigue lı́neas muy similares a la prueba anterior, simplemente
definiendo la sucesión de funciones fn como la función lineal por partes que
une los puntos (an,i , f (an,i )) y (an,i+1 , f (an,i+1 )). Los detalles se dejan como
Ejercicio 9.34 para el lector.
A continuación presentamos un par de resultados muy útiles en los cuales
aproximamos funciones continuas en forma uniforme mediante polinomios.
Definición 9.25. Sea f una función continua en el intervalo [0, 1]. Para
n ∈ N con n ≥ 1 el n-ésimo polinomio de Bernstein para f se define
mediante
n
X
n k
k
x (1 − x)n−k .
Bn (x) = Bn (x, f ) :=
f
n
k
k=0
Teorema 9.26. De aproximación de Bernstein. Sea f una función
continua en [0, 1]. Entonces la sucesión de polinomios de Bernstein Bn (x, f )
para f converge uniformemente en [0, 1] a f .
9 Sucesiones de funciones
9.5 Aproximación de funciones continuas
107
Prueba: Multiplicando el resultado del Ejercicio 9.35.1 por f (x) se obtiene
que
n
X
n k
f (x) =
f (x)
x (1 − x)n−k
k
k=0
por lo cual
f (x) − Bn (x, f ) =
n
X
k=0
n k
f (x) − f (k/n)
x (1 − x)n−k
k
y ası́
n
X
f (x) − Bn (x, f ) ≤
f (x) − f (k/n) n xk (1 − x)n−k .
k
(6)
k=0
Como f es continua en un intervalo cerrado y acotado concluimos primero
que f es acotada, digamos por M y segundo que f es uniformemente continua en dicho intervalo.
Sea ε > 0 y sea δ = δ(ε) > 0 como en la definición de continuidad uniforme
de f . En un minuto quedará claro porqué es conveniente tomar
n ≥ max{1/δ 4 , M 2 /ε2 }.
Para x ∈ [0, 1] vamos a dividir (6) en dos sumas. La primera sobre aquellos k
para los cuales |x−k/n| < 1/n1/4 ≤ δ(ε) de modo tal que, por la continuidad
uniforme, dicha suma es menor o igual que
n X n
X
n k
k
n−k
ε
x (1 − x)
≤ε
x (1 − x)n−k = ε.
k
k
k
k=0
La segunda suma sobre aquellos k para los cuales |x − k/n| ≥ 1/n1/4 , ó bien
|x − k/n|2 ≥ 1/n1/2 . En este caso
X
X n
n k
n−k
f (x) − f (k/n)
x (1 − x)
≤ 2M
xk (1 − x)n−k .
k
k
k
k
Lo anterior es igual a
X (x − k/n)2 n
xk (1 − x)n−k
2M
(x − k/n)2 k
k
√ X
2 n
≤ 2M n
(x − k/n)
xk (1 − x)n−k .
k
k
Por el Ejercicio 9.35.4
X
M
f (x) − f (k/n) n xk (1 − x)n−k ≤ 2M
√ x(1 − x) ≤ √ < ε
k
n
2 n
k
pues x(1 − x) ≤ 1/4 para 0 ≤ x ≤ 1. De este modo, siempre que n se elija
como antes se tiene que
|f (x) − Bn (x, f )| < 2ε
108
9 Sucesiones de funciones
9.5 Aproximación de funciones continuas
para cualquier valor de x ∈ [0, 1]. Por lo tanto la sucesión de los Bn converge
uniformemente en [0, 1] a f .
Teorema 9.27. De aproximación de Weierstrass. Sea f una función
continua en [a, b]. Entonces existe una sucesión de polinomios fn , cada uno
de grado n, que converge uniformemente en [a, b] a f .
Prueba: Considere la función g definida en [0, 1] mediante
g(t) := f ((b − a)t + a).
Por definición g es continua en [0, 1] y ası́ se puede aproximar en forma
uniforme en [0, 1] por los polinomios de Bernstein. El resultado se obtiene
después de un simple cambio de variable en los Bn (x, g).
Nota. La función exponencial definida en todo R no es el lı́mite uniforme
de una sucesión de polinomios. De este modo, el teorema anterior deja de
ser válido en intervalos infinitos. Véase el Ejercicio 9.39.
♦
9.5.1. Ejercicios.
Ejercicio 9.1. Defina para n = 1, 2, . . . las funciones
1 − nx, 0 ≤ x ≤ 1/n;
hn (x) =
0,
1/n < x ≤ 1.
Muestre que limn hn existe en [0, 1].
Ejercicio 9.2. Defina para n = 1, 2, . . . las funciones
nx,
0 ≤ x ≤ 1/n;
fn (x) =
1/(nx),
1/n < x.
Muestre que limn fn (x) = 0 para todo x ∈]0, ∞[.
Ejercicio 9.3. Defina para n = 2, 3, . . . las funciones
nx,
0 ≤ x ≤ 1/n;
gn (x) =
n(1 − x)/(n − 1), 1/n < x ≤ 1.
Muestre que limn gn existe en [0, 1].
Ejercicio 9.4. Muestre que la convergencia uniforme implica la convergencia puntual.
Además, muestre que la sucesión de funciones fn : [0, 1] → R, fn (x) = xn
converge puntualmente a f en [0, 1] donde f : [0, 1] → R con f (x) = 0 si
0 ≤ x < 1 y f (1) = 1 pero que la convergencia no es uniforme.
Ejercicio 9.5. Muestre que si una sucesión de funciones fn converge uniformemente a una función f sobre dos conjuntos A y B entonces la convergencia también es uniforme sobre A ∪ B.
9 Sucesiones de funciones
9.5 Aproximación de funciones continuas
109
Ejercicio 9.6. Muestre que una sucesión de funciones fn : A ⊆ R → R no
converge uniformemente a una función f : A0 ⊆ A → R si y sólo si para
algún ε0 > 0 existe una subsucesión fnk de fn y una sucesión (xk )k en A0
tal que
|fnk (xk ) − f (xk )| ≥ ε0 para todo k ∈ N.
Ejercicio 9.7. Muestre el recı́proco de la Proposición 9.8.
Ejercicio 9.8. Muestre que la sucesión de funciones (x2 + nx)/n para
n = 1, 2, . . . , converge a x para todo x ∈ R. Además muestre que la convergencia es uniforme si se restringe dicha sucesión de funciones a un intervalo
acotado [a, b]. ¿Qué sucede en el intervalo [a, ∞[?
Ejercicio 9.9. Muestre que x/(n + x) converge puntualmente pero no uniformemente a 0 en el intervalo [0, ∞[
Ejercicio 9.10. Muestre que nx/(1 + n2 x2 ) converge uniformemente en
cualquier intervalo de la forma [a, ∞[ para a > 0. ¿Qué puede decir sobre
la convergencia uniforme en el intervalo [0, ∞[?
Ejercicio 9.11. Estudie la convergencia de la sucesión de funciones cos2n x.
Ejercicio 9.12. Muestre que nx/(1 + nx) converge uniformemente en cualquier intervalo de la forma [a, ∞[ para a > 0 pero que la convergencia no es
uniforme en el intervalo [0, ∞[.
Ejercicio 9.13. Muestre que si 0 < b < 1 entonces xn /(1 + xn ) converge
uniformemente en [0, b] pero que la convergencia no es uniforme en [0, 1].
Ejercicio 9.14. Muestre que sen(nx)/(1 + nx) converge uniformemente a 0
en cualquier intervalo de la forma [a, ∞[ para a > 0 pero que la convergencia
no es uniforme en el intervalo [0, ∞[.
Ejercicio 9.15. Muestre que arctan(nx) converge uniformemente a la función π signo(x)/2 en cualquier intervalo de la forma [a, ∞[ para a > 0 pero
que la convergencia no es uniforme en el intervalo ]0, ∞[.
Ejercicio 9.16. Muestre que e−nx converge uniformemente a 0 en cualquier
intervalo de la forma [a, ∞[ para a > 0 pero que la convergencia no es
uniforme en el intervalo [0, ∞[.
Ejercicio 9.17. Verifique que x/enx y x2 /enx convergen uniformemente a
0 en [0, ∞[. ¿Qué puede decirse sobre xp /enx para p ∈ N?
Ejercicio 9.18. Analice la convergencia uniforme de n2 x2 e−nx en cualquier
intervalo de la forma [a, ∞[ con a > 0. ¿Qué sucede en el intervalo [0, ∞[?
Ejercicio 9.19. Muestre que la suma de funciones uniformemente convergentes converge uniformemente a la suma de los lı́mites.
Ejercicio 9.20. Muestre que x + 1/n converge uniformemente a x en R
pero que (x + 1/n)2 no converge uniformemente en R. ¿Qué concluye sobre
el producto de sucesiones de funciones uniformemente convergentes?
110
9 Sucesiones de funciones
9.5 Aproximación de funciones continuas
Ejercicio 9.21. Sea (fn ) una sucesión de funciones uniformemente acotada
en un conjunto A, i.e. ||fn ||A ≤ M para algún M ∈ R, y sea g una función
acotada en A. Muestre que si fn y gn convergen uniformemente a f y g
respectivamente en A entonces fn gn converge uniformemente a f g en A.
Ejercicio 9.22. Sea fn una sucesión de funciones uniformemente acotada
por M en un conjunto A. Si g es continua en [−M, M ] y fn converge
uniformemente a f en A muestre que g ◦ fn converge uniformemente a g ◦ f
en A.
Ejercicio 9.23. Sea fn : R → R una sucesión de funciones continuas tales
que
f1 (x) ≥ f2 (x) ≥ · · · ≥ fn (x) ≥ · · · para todo x ∈ R.
Muestre que si existe c ∈ R tal que limn fn (c) = 0 entonces para todo ε > 0
existe N ∈ N y δ > 0 tal que si n ≥ N entonces fn (x) < ε para todo
x ∈]c − δ, c + δ[.
Ejercicio 9.24. Dé ejemplos para verificar que el Lema 9.19 es falso si el
intervalo no es cerrado y acotado, ó si la función lı́mite no es continua.
Ejercicio 9.25. En [0, 2], muestre que la función lı́mite de la sucesión
xn /(1+xn ) no es continua por lo cual la convergencia no puede ser uniforme.
Ejercicio 9.26. Defina para n = 2, 3, . . . las funciones fn : [0, 1] → R
mediante
n2 x,
0 ≤ x ≤ 1/n;
2
−n (x − 2/n), 1/n ≤ x ≤ 2/n;
fn (x) =
0,
2/n ≤ x ≤ 1.
Muestre que las fn convergen en forma no uniforme a un lı́mite continuo.
Ejercicio 9.27. Sea (fn ) una sucesión de funciones continuas que converge
uniformemente a una función continua f en un intervalo I. Si xn → x en
I muestre que fn (xn ) → f (x).
Ejercicio 9.28. Sea f una función uniformemente continua en R. Muestre
que la sucesión de funciones fn (x) := f (x + 1/n) converge uniformemente
a f en R.
Ejercicio 9.29. Analice la convergencia puntual y uniforme de la sucesión
de funciones 1/(1 + x)n en [0, 1].
Ejercicio 9.30. Vimos en una observación anterior como el lı́mite uniforme de funciones acotadas es una función acotada. En [0, ∞[ considere la
sucesión de funciones nx/(1+nx2 ). Muestre que cada una de estas funciones
es acotada en [0, ∞[ pero que su función lı́mite no lo es. ¿Es la convergencia
uniforme?
Ejercicio 9.31. Concluya formalmente la prueba del Teorema 9.14.
9 Sucesiones de funciones
9.5 Aproximación de funciones continuas
111
Ejercicio 9.32. Muestre que la sucesión de funciones derivables xn /n en
[0, 1] converge uniformemente a una función derivable f en [0, 1]. Además
muestre que la sucesión de las fn0 converge a una función g en [0, 1] pero que
g(1) 6= f 0 (1). ¿Qué se concluye?
Ejercicio 9.33. Analice la relación entre las sucesiones fn y fn0 donde
fn (x) := e−nx /n en [0, ∞[.
Ejercicio 9.34. Escriba la prueba del Teorema 9.24.
Ejercicio 9.35. Sea x ∈ [0, 1].
(1) Con s = x, t = 1 − x y la fórmula del binomio muestre que
n X
n k
1=
x (1 − x)n−k .
k
k=0
(2) Muestre que
n
X
k n k
x (1 − x)n−k .
x=
n k
k=0
(3) En forma análoga a (1) (reemplazando n por n − 2) muestre que
n
X
n k
2
2
2
(n − n)x =
(k − k)
x (1 − x)n−k
k
k=0
y concluya que
n 2 X
1 2 1
k
n k
1−
x + x=
x (1 − x)n−k .
n
n
n
k
k=0
(4) Multiplicando (1) por x2 y (2) por −2x muestre que al sumarlas a
(3) se obtiene
n
X
1
2 n
x(1 − x) =
(x − k/n)
xk (1 − x)n−k .
n
k
k=0
Ejercicio 9.36. Complete la demostración del Teorema 9.27.
Ejercicio 9.37. ¿Qué tan grande debe de ser n para obtener la relación
|x2 − Bn (x, x2 )| ≤ 1/1000 para todo x ∈ [0, 1]? Note que aquı́ f (x) = x2 .
Ejercicio 9.38. Calcule Bn (x, x3 ). Note que aquı́ f (x) = x3 . Muestre en
forma directa que dicha sucesión converge uniformemente a x3 en [0, 1].
Ejercicio 9.39. Muestre que la función exponencial no es el lı́mite uniforme
en todo R de una sucesión de polinomios.
Ejercicio 9.40. Sea fn : [a, b] → R una sucesión de funciones que converge
en [a, b] a una función f . Suponga además que todas las derivadas fn0 son
112
9 Sucesiones de funciones
9.5 Aproximación de funciones continuas
continuas en [a, b] y que la sucesión (fn0 )n converge uniformemente en [a, b]
a una función g. Muestre que
Z x
f (x) − f (a) =
g(t) dt
a
y que f 0 (x) = g(x) para todo x ∈ [a, b].
Ejercicio 9.41. Muestre que
Z 2
2
lim
e−nx dx = 0
n→∞ a
para todo a > 0.
¿Qué sucede si a = 0?
Ejercicio 9.42. Muestre que
Z π
sen(nx)
lim
dx = 0,
n→∞ a
nx
para todo a > 0.
¿Qué sucede si a = 0?
Ejercicio 9.43. Para x ∈ [0, 1] defina fn (x) := nx/(1 + nx). Muestre que
los fn convergen de manera no uniforme a una función Riemann integrable
f en [0, 1] y que
Z 1
Z 1
f (x) dx = lim
fn (x) dx.
n→∞ 0
0
Ejercicio 9.44. Para x ∈ [0, 1] defina gn (x) := nx(1 − x)n . Discuta la
R1
convergencia de (gn )n y de 0 gn (x) dx n .
Ejercicio 9.45. Sea {r1 , r2 , . . . } una enumeración de los números racionales
en el intervalo [0, 1]. Para cada n = 1, 2, . . . defina la función
1, si x ∈ {r1 , r2 , . . . , rn },
fn (x) :=
0, si no.
Como cada fn tiene solo un número finito de
R 1 discontinuidades se tiene que
cada fn es Riemann integrable en [0, 1] y 0 fn (x) dx = 0. Verifique que
f1 (x) ≤ f2 (x) ≤ · · · y que el lı́mite de los fn es la función de Dirichlet
la cual no es Riemann integrable en [0, 1]. ¿Qué se puede decir sobre la
convergencia uniforme de las fn ?
Ejercicio 9.46. Sea (fn )n una sucesión de funciones integrables en [a, b]
que converge uniformemente en [a, b] a la función f . Defina
Z x
gn (x) :=
fn (t) dt.
a
Muestre que (gn )n converge uniformemente en [a, b] a
Z x
f (t) dt.
a
9 Sucesiones de funciones
9.5 Aproximación de funciones continuas
113
Sugerencia: x = a implica gn (x) = 0. Si a < x < b y ε > 0 encuentre
M > 0 tal que
ε
|f (x) − fn (x)| ≤
,
∀ n ≥ M, x ∈ [a, b].
b−a
Ejercicio 9.47. Sea fn : [a, b] → R una sucesión de funciones continuas
que converge uniformemente a una función f : [a, b] → R. Muestre que
Z b
Z b−(b−a)/n
f (x) dx.
lim
fn (x) dx =
n→∞ a
a
114
10. Integrales impropias
Hasta ahora solo hemos estudiado funciones acotadas definidas en intervalos cerrados y acotados. En esta sección iniciamos el estudio de funciones
no acotadas en intervalos abiertos o no acotados. Para esquematizar el
trabajo, en la primera parte estudiaremos funciones acotadas en intervalos
no acotados (integrales impropias de primer especie). En la segunda parte
estudiamos funciones no acotadas en intervalos abiertos y acotados (integrales impropias de segunda especie). Por último, estudiamos funciones no
acotadas en intervalos no acotados.
Como es de esperar, el área encerrada bajo el gráfico de una función
positiva no acotada puede no ser finita. De este modo, lo que nos interesa
en esta sección es determinar a que funciones (no acotadas) les podemos
asignar una integral.
10.1. Integrales impropias de primer especie. En esta sección estudiamos funciones acotadas definidas en intervalos no acotados de la forma
[a, ∞[. El ejemplo por excelencia son las funciones f (x) = x−p para x ∈
[1, ∞[ y p > 1.
Si queremos calcular el área bajo
la gráfica de f en el intervalo no
acotado [1, ∞[, tiene sentido pensar que dicha área es el lı́mite sobre b > 1 de las áreas
Z
1
b
f
b→∞
a
b
1
−1
1
1
= 1 −
dx
=
−→b→∞
.
p
p−1
p−1
x
(p − 1)x
p − 1 (p − 1)b
p−1
1
De este modo,
Z b
Z ∞
1
1
1
dx := lim
dx =
,
p
p
b→∞ 1 x
x
p−1
1
siempre que
p > 1.
Observe como para p < 1 se tiene que
b
Z b
1
1
−1
= 1 −
dx =
−→b→∞ ∞.
p
p−1
(p − 1)x
p − 1 (p − 1)bp−1
1 x
1
En forma similar
b
Z
1
b
1
dx = ln x = ln b −→b→∞ +∞,
x
1
por lo cual
∞
Z b
1
1
dx := lim
dx no existe.
b→∞ 1 x
x
1
Los dos ejemplos anteriores motivan la siguiente definición.
Z
10 Integrales impropias
10.1 Integrales impropias de primer especie 115
Definición 10.1. Sea f : [a, ∞[→ R una función Riemann integrable en
[a, b] para todo b > a.
Rb
(1) Si limb→∞ a f (x) dx existe entonces
decimos que la integral imR∞
propia de primer especie a f (x) dx es convergente y
Z b
Z ∞
f (x) dx.
f (x) dx := lim
b→∞ a
a
Rb
(2) Si limb→∞
R ∞ a f (x) dx no existe entonces decimos que la integral impropia a f (x) dx es divergente.
Los ejemplos anteriores muestran que
Lema 10.2.
Z
1
∞
1
dx
xp
diverge si p ≤ 1,
=
1
p−1
si p > 1,
(converge).
Nota. Observe que si f : [a, ∞[→ R es Riemann
R ∞integrable en [a, b] para
todo b > a, por la aditividad de la integral, si N f (x) dx es convergente
RN
R∞
f
(x)
dx
=
(divergente)
para
algún
N
>
a
se
obtiene
que
a f (x) dx +
a
R∞
♦
N f (x) dx es convergente (divergente).
En general, no siempre es fácil calcular el valor exacto de una integral convergente, por lo cual muchas veces nos limitamos a determinar únicamente
si converge o diverge, sin preocuparnos por su valor.
El siguiente criterio es muy útil para determinar la divergencia de ciertas
integrales impropias.
10.3. Si limx→∞ f (x) = l ∈ R\{0} ó si limx→∞ f (x) = ±∞ entonces
RLema
∞
f
(x)
dx es divergente.
a
Prueba: Si limx→∞ f (x) = l ∈ R con l > 0 (sin pérdida de generalidad)
entonces para todo ε > 0 existe N ∈ N tal que f (x) > l/2 para todo x ≥ N .
De este modo
Z ∞
Z N
Z b
Z N
l(b − N )
f (x) dx =
f (x) dx + lim
f (x) dx ≥
f (x) dx + lim
b→∞ N
b→∞
2
a
a
a
R∞
lo cual implica que a f (x) dx es divergente. Los otros casos, l < 0 y
limx→∞ f (x) = ±∞, se tratan en forma similar.
Ejemplo 10.4. Las integrales
Z ∞
arctan x dx,
0
son todas divergentes.
En contraste
Z
∞
Z
sen x dx,
0
∞
ln x dx
1
116 10 Integrales impropias
10.1 Integrales impropias de primer especie
Proposición
R ∞ 10.5. Criterio de Cauchy. Sea f : [a, ∞[→ R. La integral
impropia a f (x) dx es convergente si y solo si para todo ε > 0 existe M ∈
R+ tal que
Z b
< ε,
f
(x)
dx
∀ b ≥ c ≥ M.
c
Prueba: Si
R∞
a
f (x) dx es convergente, tenemos que
Z b
f (x) dx = l
lim
b→∞ a
para algún l ∈ R. De este modo dado ε > 0 existe M ∈ R+ tal que
Z b
f (x) dx − l < ε/2,
∀ b ≥ M.
a
Ası́
Z b
Z b
Z c
f (x) dx = f (x) dx −
f (x) dx
c
a
a
Z b
Z c
f (x) dx − l + l −
f (x) dx < ε.
≤
a
a
Para el recı́proco consideramos la sucesión numérica
Z n
an =
f (x) dx,
∀ n ≥ M.
a
Por hipótesis
Z
|am − an | = m
n
f (x) dx < ε
por lo cual es una sucesión de Cauchy. Como toda sucesión de Cauchy es
convergente, existe l ∈ R tal que
Z n
lim an = lim
f (x) dx = l.
n
n
Al considerar
Z b
Z
≤
f
(x)
dx
−
l
a
a
a
[|b|]
Z
f (x) dx − l + b
[|b|]
f (x) dx,
se obtiene el resultado.
R∞
Nota. Note que a f (x) dx es convergente si y solo si para todo ε > 0
existe M > 0 tal que
Z ∞
Z b
<ε
f
(x)
dx
=
lim
f
(x)
dx
M
b→∞
M
gracias al resultado anterior y a la continuidad del valor absoluto.
♦
10 Integrales impropias
10.1 Integrales impropias de primer especie 117
R∞
Ejemplo 10.6. Para estudiar 1 senx x dx usamos integración por partes.
Z b
Z b
Z ∞
sen x
sen x
cos x
1
dx
dx = lim
dx = lim − cos b + cos 1 −
b→∞ 1
b→∞ b
x
x
x2
1
1
Z ∞
cos x
= cos 1 −
dx.
x2
1
Ahora bien
Z b
Z b
| cos x|
1
cos x dx
≤
dx
≤
dx.
2
2
2
x
M
M x
M x
R∞
2
De la Proposición anterior y de la convergencia
de
1 1/x dx se tiene la
R ∞ sen x
convergencia de la integral impropia 1
x dx.
Z
b
Una forma de lidiar con funciones que no son positivas es considerar su
valor absoluto. Para que esta idea tenga sentido, es necesario relacionar la
integral de la función con la integral del valor absoluto de la función. Como
un corolario del resultado anterior, y a partir de la desigualdad
Z b
Z b
f (x) dx ≤
|f (x)| dx,
M
M
se tiene que:
Corolario 10.7. Si f : [a, ∞[→ R es Riemann integrable en todo interRb
R∞
valo de la forma [a, b] y a |f (x)| dx es convergente entonces, a f (x) dx es
convergente.
Definición 10.8. Si f : [a, ∞[→ R es Riemann
R ∞integrable en todo intervalo de la forma [a, b] Ry si la integral impropia a |f (x)| dx es convergente
∞
entonces decimos que a f (x) dx es absolutamente convergente.
Ejemplo 10.9. Como vimos antes
vergente.
R∞
1
cos x/x2 dx es absolutamente con
Una forma muy conveniente para determinar la convergencia o divergencia de una integral impropia es compararla con otra integral de la cual ya
conocemos el comportamiento.
Corolario 10.10. Criterio de comparación. Sean f, g : [a, ∞[→ R dos
funciones Riemann integrables en todo intervalo de la forma [a, b] con b > a,
tales que 0 ≤ f (x) ≤ g(x) para todo x.
R∞
R∞
(1) Si a f (x) dx es divergente entonces a g(x) dx es divergente.
R∞
R∞
(2) Si a g(x) dx es convergente entonces a f (x) dx es convergente y
Z ∞
Z ∞
f (x) dx ≤
g(x) dx.
a
a
118 10 Integrales impropias
10.1 Integrales impropias de primer especie
Prueba: Dado que 0 ≤ f (x) ≤ g(x) para todo x se tiene que
Z b
Z b
0≤
f (x) dx ≤
g(x) dx.
M
M
La prueba se obtiene del criterio de Cauchy y se deja como Ejercicio 10.1
para el lector.
Ejemplo 10.11.
Z
0≤
1
∞
√
1
dx ≤
1 + x5
Z
1
∞
1
dx.
x5/2
Con p = 5/2 > 1 sabemos que la segunda integral impropia converge por lo
cual la primera también converge.
Ejemplo 10.12. Como
Z b
Z ∞
−x
e dx = lim
e−x dx = lim −e−x |b0 = 1
0
b→∞ 0
b→∞
dicha integral es convergente. Además, para todo x > 1 se tiene que x2 > x
2
por lo cual e−x < e−x para todo x > 1. Se sigue que
Z ∞
2
e−x dx
0
es convergente. En el Ejercicio 8.7 calculamos su valor.
Una generalización del corolario anterior está dada por el siguiente resultado:
Lema 10.13. Criterio de comparación mediante lı́mite. Sean f, g :
[a, ∞[→ R dos funciones positivas y Riemann integrables en cualquier intervalo de la forma [a, b].
(1) Si
f (x)
lim
=l>0
x→∞ g(x)
R∞
R∞
entonces ó ambas integrales impropias a f (x) dx y a g(x) dx son
convergentes ó ambas son divergentes.
(2) Si
f (x)
lim
= +∞
x→∞ g(x)
R∞
entonces
si
la
integral
impropia
a Rf (x) dx es convergente se tiene
R∞
∞
que Ra g(x) dx es convergente, y si a g(x) dx es divergente se tiene
∞
que a f (x) dx es divergente.
(3) Si
f (x)
lim
=0
x→∞ g(x)
10 Integrales impropias
10.1 Integrales impropias de primer especie 119
R∞
R∞
entonces si a f (x) dx es divergente
se
tiene
que
a g(x) dx es diR∞
vergente,
y
por
contrapositiva
si
g(x)
dx
es
convergente
se tiene
a
R∞
que a f (x) dx es convergente.
Prueba: Todos los casos siguen del Corolario 10.10: (1) Dado l > ε > 0
existe M ∈ R+ tal que (−ε + l)g(x) < f (x) < (ε + l)g(x), ∀x ≥ M .
(2) Dado L > 0 existe M ∈ R+ tal que f (x) > Lg(x), ∀ x ≥ M .
(3) Dado ε > 0 existe M ∈ R+ tal que f (x) < εg(x), ∀ x ≥ M .
Ejemplo 10.14. Como
√ 1
x2 −x
1
x→∞
x
lim
la integral
R∞
1
= 1,
√
1/ x2 − x dx es divergente.
Ejemplo 10.15. La función Gamma. Para α ≥ 1 defina
Z ∞
Γ(α) :=
e−x xα−1 dx.
0
Observe que e−x xα−1 es Riemann integrable en cualquier intervalo de la
forma [0, b]. Ahora bien
e−x xα−1
xα+1
=
lim
= 0.
x→∞
x→∞ ex
x−2
lim
Como
R∞
1
1/x2 dx es convergente se tiene que
Z 1
Z ∞
−x α−1
Γ(α) =
e x
dx +
e−x xα−1 dx
0
1
es convergente.
R∞
No es difı́cil verificar que Γ(α + 1) = αΓ(α). Como Γ(1) = 0 e−x dx = 1
se tiene que Γ(n + 1) = n! para todo n entero positivo.
Muchas veces nos vamos a encontrar
R ∞ integrales impropias dadas por el
producto de funciones, por ejemplo 1 cos x/x dx. Los siguientes criterios
nos ayudan a estudiar este tipo de integrales. La idea básica es la siguiente.
Si g es acotada (digamos |g(x)| ≤ K para todo x), entonces
Z b
Z b
≤K
f
(x)g(x)
dx
|f (x)| dx
M
M
y podemos utilizar la Proposición 10.5.
Lema 10.16. Sean f, g : [a, ∞[→ R dos funciones Riemann integrables
en
R∞
cualquier intervalo de la forma [a, b] tales
que
|g(x)|
≤
K
y
f
(x)
dx
a
R∞
es absolutamente convergente. Entonces a f (x)g(x) dx es absolutamente
convergente.
120 10 Integrales impropias
10.1 Integrales impropias de primer especie
Prueba: Para todo ε > 0 existe M ∈ R+ tal que
Z b
Z b
|f (x)g(x)| dx ≤ K
|f (x)| dx < ε.
M
M
El resultado se obtiene a partir de la Proposición 10.5.
Corolario 10.17. Sean f, g : [a, ∞[→ R dos funciones Riemann integrables
en cualquier intervalo
R ∞ de la forma [a, b] tales que |g(x)|
R ∞≤ K y f (x) ≥
0 para todo x. Si a f (x) dx es convergente entonces a f (x)g(x) dx es
absolutamente convergente.
Lema 10.18. Criterio de Dirichlet. Sea f : [a, ∞[→ R una función conRb
tinua en cualquier intervalo de la forma [a, b] que además satisface | a f (x) dx| ≤
K paraR todo b ≥ a. Si g es decreciente en [a, ∞[ con limx→∞ g(x) = 0 en∞
tonces a f (x)g(x) dx es convergente.
Prueba: Primero observamos que por ser g decreciente es Riemann integrable en cualquier intervalo de la forma [a, b] y ası́ f g es Riemann integrable
en tales intervalos.
Para todo ε > 0 existe M ∈ R+ tal que 0 ≤ g(x) ≤ ε para todo x ≥ M .
Por el Lema 4.38, dado b > M existe c ∈ [M, b] tal que
Z b
Z c
f (x)g(x) dx = |g(M )|
f (x) dx < εK.
M
M
El resultado se obtiene a partir de la Proposición 10.5.
Ejemplo 10.19. Considere la integral
Z ∞
sen x
dx,
xp
1
0 < p < 1.
La función g(x) = 1/xp es decreciente en [1, ∞[ con limx→∞ 1/xp = 0.
Además
Z b
= | cos a − cos b| ≤ 2.
sen
x
dx
a
Del criterio de Dirichlet se sigue que dicha integral impropia es convergente.
Lema 10.20. Criterio de Abel. Sea f : [a, ∞[→ RR una función con∞
tinua en cualquier intervalo de la forma [a, b] tal que a f (x) dx sea conSi g es monótona en [a, ∞[ con limx→∞ g(x) = l ∈ R entonces
Rvergente.
∞
f
(x)g(x)
dx es convergente.
a
Prueba: Primero observamos que por ser g monótona es Riemann integrable
en cualquier intervalo de la forma [a, b] y ası́ f g es Riemann integrable en
tales intervalos.
10 Integrales impropias
10.1 Integrales impropias de primer especie 121
Como limx→∞ g(x) = l ∈ R, existen K, M ∈ R+ tal que |g(x)| ≤ K para
todo x ≥ M .
Por el Ejercicio 4.47, si b > M existe c ∈ [M, b] tal que
Z b
Z c
Z b
f (x) dx < 2εK.
f (x) dx + |g(b)|
f (x)g(x) dx ≤ |g(M )|
c
M
M
El resultado se obtiene a partir del Criterio de Cauchy (Proposición 10.5).
Ejemplo 10.21. Como limx→∞ arctan x = π/2 y arctan x es estrı́ctamente
creciente en [0, ∞[ tenemos que
Z ∞
Z ∞
f (x) dx sea convergente.
f (x) arctan x dx converge siempre que
a
a
Por ejemplo,
Z ∞
Z ∞
sen x arctan x
2
dx,
e−x arctan x dx,
x
1
0
son todas convergentes.
Z
1
∞
arctan x
dx
xp
(p > 1)
En los ejemplos que hemos estudiado, el intervalo de definición es de la
forma [a, ∞[. En general este no tiene por que ser el caso. Por ejemplo la
función f (x) = ex crece indefinidamente en cualquier intervalo de la forma
[a, ∞[ sin embargo tiende a 0 cuando x tiende a −∞. La definición de
Rb
−∞ f (x) dx, es similar a la anterior.
Definición 10.22. Sea f : R → R una función Riemann integrable en
cualquier intervalo de la forma [a, b]. Por definición,
Z b
Z b
f (x) dx := lim
f (x) dx
a→−∞ a
−∞
y decimos que dicha integral es convergente si el lı́mite existe, y que es
divergente en caso contrario.
Rb
Ejemplo 10.23. La integral −∞ ecx dx es convergente para todo c > 0. De
hecho
Z b
exc b ebc
cx
=
e dx = lim
.
a→−∞ c c
−∞
a
Definición 10.24. Sea f : R → R una función Riemann integrable en
cualquier intervalo de la forma [a, b]. Si para todo c ∈ R se tiene que ambas
integrales
Z
Z
∞
c
f (x) dx
y
f (x) dx
−∞
c
R∞
son convergentes decimos que −∞ f (x) dx es convergente y en tal caso
Z ∞
Z c
Z ∞
f (x) dx =
f (x) dx +
f (x) dx.
−∞
−∞
c
122 10 Integrales impropias
10.1 Integrales impropias de primer especie
En caso contrario decimos que
R∞
−∞ f (x) dx
es divergente.
Nota. (1) Al decir “ambas integrales” en la definición anterior estamos
abusando del lenguaje. En realidad no son integrales propiamente sino,
lı́mites de integrales.
(2) Observe que basta con que una de las dos integrales de la derecha sea
divergente para que la integral de la izquierda también lo sea.
(3) En caso de convergencia, el valor de convergencia es independiente del
valor de c pues
Z ∞
Z c
Z ∞
f (x) dx =
f (x) dx +
f (x) dx
−∞
−∞
c
c
Z
= lim
f (x) dx + lim
a→−∞ a
= lim
f (x) dx +
a→−∞ a
b→∞ c
d
f (x) dx + lim
a→−∞ a
Z d
b→∞ d
Z
f (x) dx +
−∞
b
f (x) dx
b
Z
= lim
=
Z
f (x) + lim
d
Z
f (x) dx
b→∞ c
Z c
d
Z
b
Z
f (x) dx
∞
f (x) dx.
d
para cualquier d ∈ R.
(4) En el desarrollo anterior, al poner
Z ∞
Z c
Z b
f (x) dx = lim
f (x) dx + lim
f (x) dx,
−∞
a→−∞ a
b→∞ c
es importante notar que cada lı́mite es independiente del otro. Adelante
veremos que sucede si se consideran ambos lı́mites conjuntamente.
♦
Ejemplo 10.25.
Z ∞
Z 0
Z b
1
1
1
dx
=
lim
dx
+
lim
dx
2
2
a→−∞
b→∞
1
+
x
1
+
x
1
+
x2
a
0
−∞
0
b π π
= lim arctan xa + lim arctan x0 = + = π.
a→−∞
b→∞
2
2
Ejemplo 10.26.
Z ∞
−∞
ex
dx =
1 + ex
Z
0
−∞
ex
dx +
1 + ex
Z
0
∞
ex
dx.
1 + ex
Como la segunda integral es divergente pues limx→∞ ex /(1 + ex ) = 1, tenemos que la integral de la izquierda es divergente, a pesar de que la primer
integral de la derecha es convergente.
¿Porqué es convergente la primera integral de la derecha?
10 Integrales impropias
La integral
R∞
10.2 Integrales impropias de segunda especie 123
−∞ x dx
es claramente divergente, aún ası́
Z a
x2 a
lim
x dx = lim
= 0.
a→∞ −a
a→∞ 2 −a
El resultado anterior se basa en la imparidad de la función f (x) = x, la cual
produce un balance entre los valores positivos y negativos de la función.
Definición 10.27. Sea f : R → R una función Riemann integrable en todo
intervalo de la forma [−a, a]. Se dice que la integral de f converge en
valor principal si el lı́mite
Z a
Z ∞
f (x) dx
f (x) dx := lim
vp
−∞
a→∞ −a
existe.
La demostración del siguiente resultado se deja como Ejercicio 10.20 para
el lector. Es evidente del ejemplo anterior que la convergencia en valor
principal no garantiza la convergencia en el sentido regular.
Lema 10.28.R Si f : R → R es Riemann integrable en todo intervalo de la
∞
forma [a, b] y −∞ f (x) dx es convergente entonces la integral de f converge
en valor principal y
Z ∞
Z ∞
vp
f (x) dx =
f (x) dx.
−∞
−∞
10.2. Integrales impropias de segunda especie. En esta sección estudiamos funciones definidas en intervalos acotados de modo tal que la función
sea no acotada en un subintervalo. El ejemplo por excelencia son las funciones f (x) = x−p para x ∈]0, 1] y p < 1.
En forma similar al caso de integrales de primera
especie, si queremos calcular el área bajo la
gráfica de f en el intervalo ]0, 1], tiene sentido
pensar que dicha área es el lı́mite sobre a > 0 de
las áreas
f
0←a
Z
a
1
b
1
1
1
−1
1
1
=
dx
=
−
−→a→0+
.
xp
(p − 1)xp−1 a (p − 1)ap−1 (p − 1)
1−p
De este modo,
Z 1
Z 1
1
1
1
dx := lim
dx =
,
siempre que
p
p
+
1−p
a→0
0 x
a x
Como en el caso anterior,
1
Z 1
1
dx = ln x = − ln a −→a→0+ +∞.
a x
a
p < 1.
124 10 Integrales impropias
10.2 Integrales impropias de segunda especie
Por lo cual
1
Z 1
1
1
dx := lim
dx no existe.
+
a→0
0 x
a x
Los dos ejemplos anteriores motivan la siguiente definición.
Z
Definición 10.29. Sea f : ]a, b] → R una función no acotada y Riemann
integrable en [c, b] para todo c > a.
Rb
(1) Si limc→a+ c f (x) dx existe entonces decimos que la integral imRb
propia de segunda especie a f (x) dx es convergente y
Z b
Z b
f (x) dx := limc→a+
f (x) dx.
a
c
Rb
(2) Si limc→a+ c f (x) dx no existe entonces decimos que la integral imRb
propia a f (x) dx es divergente.
Nota. Es importante verificar que de verdad
R 1 se está frente a una integral
impropia de segunda especie. Por ejemplo 0 sen x/x dx no es una integral
impropia de segunda especie dado que
sen x
lim
= 1.
x
x→0+
De este modo f (x) = sen x/x es continua en todo ]0, 1] y puede redefinirse
en x = 0 para obtener una función continua y ası́ Riemann integrable en
[0, 1].
♦
Rb
Nota. En la literatura es usual encontrar la notación a+ f (x) dx, la cual
enfatiza el hecho de tener una integral impropia de segunda especie en a.
En estas notas vamos a obviar ese hecho, dando al lector la responsabilidad
de identificar el tipo de integral de segunda especie en uso.
♦
Los ejemplos anteriores muestran que
Lema 10.30.
Z
0
1
1
dx
xp
diverge si p ≥ 1,
=
1
1−p
si p < 1,
(converge).
Nota. Observe que si f : ]a, b] → R es RiemannR integrable en [c, b] para
c
todo c > a, por la aditividad de la integral, si a f (x) dx es convergente
Rb
Rc
(divergente) para algún c ∈]a, b[ se obtiene que a f (x) dx = a f (x) dx +
Rb
♦
c f (x) dx es convergente (divergente).
Nota. Si f : ]a, b] → R es Riemann integrable en [c, b] para todo c > a
Rb
R b−a
entonces a f (x) dx es convergente si y solo si 0 f (x+a) dx es convergente
10 Integrales impropias
10.2 Integrales impropias de segunda especie 125
gracias a la biyectividad de la función φ(x) = x−a. En caso de convergencia
se tiene
Z
Z
b
b−a
f (x) dx =
a
f (x + a) dx.
♦
0
El siguiente criterio es muy útil para estudiar ciertas integrales impropias
de segunda especie.
Lema 10.31. Si f : ]a, b] → R es Riemann integrable en [c, b] para todo
Rb
R∞
c > a entonces a f (x) dx es convergente si y solo si 1 x12 f x1 + a dx es
b−a
convergente. En caso de convergencia se tiene
Z b
Z ∞
1
1
f (x) dx =
f
+ a dx.
1
x2
x
a
b−a
Prueba: Como la función φ :]a, b] → [1/(b − a), ∞[ definida por φ(x) =
1/(x − a) es invertible, por el teorema del cambio de variable se tiene que
Z b
Z 1
c−a 1
1
f (x) dx =
f
+ a dx,
∀ c ∈]a, b].
1
x2
x
c
b−a
El resultado sigue de la equivalencia entre c → a+ y 1/(c − a) → +∞.
Ejemplo 10.32.
Z
0
1
Z ∞
1
sen x
sen
dx =
dx
x
x2
1
son ambas convergentes.
Proposición 10.33. Criterio de Cauchy. Sea f : ]a, b] → R. La integral
Rb
a f (x) dx es convergente si y solo si para todo ε > 0 existe δ > 0 tal que
Z d
< ε,
f
(x)
dx
∀ c, d ∈]a, a + δ[.
c
La prueba de este resultado es una adaptación de la prueba de la Proposición 10.5 por lo cual se deja como Ejercicio 10.22 para el lector.
Rb
Nota. Note que a f (x) dx es convergente si y solo si
Z δ
Z δ
f (x) dx < ε
f (x) dx = lim a
c→a+
c
gracias al resultado anterior y a la continuidad del valor absoluto.
♦
Ejemplo 10.34.
Z 1
Z 1
1
1
1
1
sen
dx = lim
sen
dx
+
x
x
c→0
0 x
c x
Z b
Z ∞
sen x
sen x
= lim
dx =
dx.
b→∞ 1
x
x
1
Ambas integrales son convergentes.
126 10 Integrales impropias
10.2 Integrales impropias de segunda especie
Corolario 10.35. Si f : ]a, b] → R es Riemann integrable en todo intervalo
Rb
de la forma [c, b] con b > c > a y a |f (x)| dx es convergente entonces
Rb
a f (x) dx es convergente.
Al igual que para integrales impropias de primera especie tenemos:
Definición 10.36. Si f : ]a, b] → R es no acotada y Riemann integrable
en todo intervalo de la forma [c, b] con b > c > a y si la integral impropia
Rb
Rb
|f
(x)|
dx
es
convergente
entonces
decimos
que
a
a f (x) dx es absolutamente convergente.
Ejemplo 10.37.
R1
0
sen
1
x
dx es absolutamente convergente. ¿Porqué? El siguiente resultado es el equivalente al Corolario 10.10, en este caso
para integrales impropias de segunda especie. La demostración se deja como
Ejercicio 10.24 para el lector.
Corolario 10.38. Criterio de comparación. Sean f, g : ]a.b] → R dos
funciones Riemann integrables en todo intervalo de la forma [c, b] con b >
c > a, tales que 0 ≤ f (x) ≤ g(x) para todo x.
Rb
Rb
(1) Si a f (x) dx es divergente entonces a g(x) dx es divergente.
Rb
Rb
(2) Si a g(x) dx es convergente entonces a f (x) dx es convergente y
Z b
Z b
f (x) dx ≤
g(x) dx.
a
a
Al igual que antes, una generalización del corolario anterior está dada por
el siguiente resultado. La prueba se deja como Ejercicio 10.25 para el lector.
Lema 10.39. Criterio de comparación mediante lı́mite. Sean f, g :
]a, b] → R dos funciones positivas y Riemann integrables en cualquier intervalo de la forma [c, b] con b > c > a.
(1) Si
f (x)
lim
=l>0
+
x→a g(x)
Rb
Rb
entonces ó ambas integrales impropias a f (x) dx y a g(x) dx son
convergentes ó ambas son divergentes.
(2) Si
f (x)
lim
= +∞
+
x→a g(x)
Rb
Rb
entonces si a f (x) dx es convergente se tiene que a g(x) dx es conRb
Rb
vergente, y si a g(x) dx es divergente se tiene que a f (x) dx es divergente.
10 Integrales impropias
10.2 Integrales impropias de segunda especie 127
(3) Si
lim
x→a+
f (x)
=0
g(x)
Rb
Rb
entonces si a f (x) dx es divergente se tiene que a g(x) dx es diRb
Rb
vergente, y si a g(x) dx es convergente se tiene que a f (x) dx es
convergente.
Ejemplo 10.40. Como
lim
x→0+
la integral
R
1
2
0
√ 1
x−x2
√1
x
= 1,
√
1/ x − x2 dx es convergente.
Nota. Al igual que en el caso de integrales impropias de primera especie,
algunas veces tendremos que estudiar integrales impropias de segunda especie cuyo integrando es el producto de dos funciones. Este es el momento
oportuno para invitar al lector a escribir y demostrar criterios equivalentes
al de Dirichlet y de Abel, pero en este caso para integrales impropias de
segunda especie.
♦
Definición 10.41. Sea f : [a, b[→ R una función no acotada y Riemann
integrable en cualquier intervalo de la forma [a, c] con a < c < b. Por
definición,
Z b
Z b
f (x) dx
f (x) dx := lim
c→b−
a
a
y decimos que dicha integral es convergente si el lı́mite existe, y que es
divergente en caso contrario.
Ejemplo 10.42.
1
Z
0
diverge si p ≥ 1,
1
dx
(1 − x)p
converge si p < 1.
Definición 10.43. Sea f : [a, b] \ {c} → R, con a < c < b, una función no
acotada y Riemann integrable en [a, d] ∪ [e, b] para cualesquiera a < d < c <
e < b. Si ambas integrales
Z c
Z b
f (x) dx
y
f (x) dx
a
c
Rb
son convergentes decimos que a f (x) dx es convergente y en tal caso
Z b
Z c
Z b
f (x) dx =
f (x) dx +
f (x) dx.
a
En caso contrario decimos que
a
Rb
a
c
f (x) dx es divergente.
128 10 Integrales impropias
10.2 Integrales impropias de segunda especie
Nota. (1) Nuevamente, al decir “ambas integrales” en la definición anterior
estamos abusando del lenguaje. En realidad no son integrales propiamente
sino, lı́mites de integrales.
(2) Observe que basta con que una de las dos integrales de la derecha sea
divergente para que la integral de la izquierda también lo sea.
(3) Al poner
Z b
Z d
Z b
f (x) dx = lim
f (x) dx + lim
f (x) dx,
d→c−
a
e→c+
a
e
es importante notar que cada lı́mite es independiente del otro.
Ejemplo 10.44.
Z 1
Z d
Z 1
1
1
1
√
√
√
dx = lim
dx + lim
dx
3
3
3
−
+
x
x
x
d→0
e→0
−1
−1
e
√
√
3
3
2 x2 d
2 x2 1
2 2
= lim
+ lim
= − + = 0.
3 −1 e→0+ 3 e
3 3
d→0−
♦
Ejemplo 10.45.
Z 0
Z 1
1
1
1
dx =
dx +
dx.
−1 x
0 x
−1 x
Como la segunda integral de la derecha es divergente tenemos que la integral
de la izquierda es divergente.
Z
1
Ahora damos la definición de convergencia para el caso f :]a, b[→ R.
Definición 10.46. Sea f :]a, b[→ R una función no acotada y Riemann
integrable en cualquier intervalo de la forma [c, d] con a < c < d < b. Si
para todo c ∈]a, b[ se tiene que ambas integrales
Z c
Z b
f (x) dx
y
f (x) dx
a
c
Rb
son convergentes decimos que a f (x) dx es convergente y en tal caso
Z b
Z c
Z b
f (x) dx =
f (x) dx +
f (x) dx.
(7)
a
a
En caso contrario decimos que
Rb
a
c
f (x) dx es divergente.
Nota. (1) Observe que basta con que una de las dos integrales de la derecha
sea divergente para que la integral de la izquierda también lo sea.
(2) En caso de convergencia, el valor de convergencia es independiente del
valor de c, véase Ejercicio 10.26.
(3) En el desarrollo anterior, al poner
Z b
Z c
Z e
f (x) dx = lim
f (x) dx + lim
f (x) dx,
a
d→a+
d
e→b−
c
es importante notar que cada lı́mite es independiente del otro.
♦
10 Integrales impropias
10.2 Integrales impropias de segunda especie 129
Ejemplo 10.47.
Z 1
Z 1
Z 1
2
1
1
1
√
√
√
dx =
dx +
dx.
1
x(1 − x)
x(1 − x)
x(1 − x)
0
0
2
Por el criterio de comparación
R 1 1 mediante lı́mite, la segunda integral a la
derecha se comporta como 1 1−x dx, la cual es divergente. Como conclusión
2
la integral de la izquierda es divergente, a pesar de que la primera integral
de la derecha es convergente.
Presentamos seguidamente la definición de convergencia para el caso f :
]a, ∞[→ R. Otros casos posibles se dejan como ejercicio para el lector.
Definición 10.48. Sea f :]a, ∞[→ R, una función no acotada y Riemann
integrable en [b, c] para cualesquiera a < b < c. Si para todo c ∈]a, ∞[ se
tiene que ambas integrales
Z c
Z ∞
f (x) dx
y
f (x) dx
a
c
R∞
son convergentes decimos que a f (x) dx es convergente y en tal caso
Z ∞
Z c
Z ∞
f (x) dx =
f (x) dx +
f (x) dx.
(8)
a
a
En caso contrario decimos que
R∞
a
c
f (x) dx es divergente.
Nota. (1) Observe que basta con que una de las dos integrales de la derecha
sea divergente para que la integral de la izquierda también lo sea.
(2) En caso de convergencia, el valor de convergencia es independiente del
valor de c, véase Ejercicio 10.27.
(2) En el desarrollo anterior, al poner
Z ∞
Z c
Z d
f (x) dx = lim
f (x) dx + lim
f (x) dx,
a
b→a+
b
d→∞ c
es importante notar que cada lı́mite es independiente del otro.
♦
R∞
Ejemplo 10.49. La integral 0 1/xp dx es divergente para todo valor de
p. De hecho,
Z ∞
Z 1
Z ∞
1
1
1
dx
=
dx
+
dx.
p
p
p
x
x
x
0
0
1
Para los valores de p para los cuales una de las integrales de la derecha es
convergente la otra es divergente.
Por último vemos el concepto de convergencia en valor principal para integrales de segunda especie. Por simplicidad veremos el caso a = 0, dejando
para el lector las generalizaciones evidentes.
130 10 Integrales impropias
10.3 Integrales impropias con un parámetro
Definición 10.50. Sea f : [−a, 0[∩]0, a] → R una función no acotada y
Riemann integrable en [−a, −b] ∪ [b, a] para todo 0 < b < a. Se dice que la
integral de f converge en valor principal si el lı́mite
Z a
Z −b
Z a
f (x) dx
f (x) dx +
f (x) dx := lim
vp
b→0+
−a
−a
b
existe.
Ra
Ejemplo 10.51. Si f : [−a, a] → R es impar entonces vp −a f (x) dx = 0.
De hecho
Z a
Z a
Z a
f (x) dx = 0.
f (x) dx +
f (x) dx = lim −
vp
b→0+
−a
b
b
La demostración del siguiente resultado se deja como Ejercicio 10.28 para
el lector.
Lema 10.52. Si f : [−a,
R a a] → R es Riemann integrable en [−a, −b] ∪ [b, a]
para todo 0 < b < a y −a f (x) dx es convergente entonces la integral de f
converge en valor principal y
Z a
Z a
vp
f (x) dx =
f (x) dx.
−a
−a
10.3. Integrales impropias con un parámetro. En esta sección estudiamos funciones de la forma
Z ∞
F (y) =
f (x, y) dx
a
donde el integrando f está definido en [a, ∞[×[c, d]. Antes que todo necesitamos el concepto de convergencia uniforme de integrales impropias.
Definición 10.53. Si la función F está definida mediante
Z ∞
F (y) =
f (x, y) dx
a
donde el integrando f está definido en [a, ∞[×[c, d] decimos que la convergencia de estas integrales impropias es uniforme en [c, d] si para todo ε > 0
existe K ∈ N tal que
Z b
F (y) −
∀ b ≥ K, y ∈ [c, d].
f (x, y) dx < ε,
a
Teorema 10.54. Si la función F está definida mediante
Z ∞
F (y) =
f (x, y) dx
a
donde el integrando f es continuo en [a, ∞[×[c, d] y la convergencia de estas
integrales impropias es uniforme en [c, d] entonces F es continua en [c, d].
10 Integrales impropias
10.3 Integrales impropias con un parámetro 131
Prueba: Considere la sucesión de funciones
Z a+n
f (x, y) dx.
Fn (y) =
a
Por el Lema 8.2 cada Fn es una función continua en [c, d]. Como el lı́mite
uniforme de funciones continuas es continua se obtiene el resultado.
Teorema 10.55. Si la función F está definida mediante
Z ∞
f (x, y) dx
F (y) =
a
donde el integrando f es continuo en [a, ∞[×[c, d] y la convergencia de estas
integrales impropias es uniforme en [c, d] entonces F es Riemann integrable
en [c, d] y
Z d
Z d Z ∞
Z ∞ Z d
F (y) dy =
f (x, y) dx dy =
f (x, y) dy dx.
c
c
a
a
c
Prueba: Observe como la integrabilidad es consecuencia de la continuidad
ya demostrada. Definiendo Fn como en la demostración anterior tenemos
que las Fn convergen uniformemente a F en [c, d]. Por los Teoremas 9.18
y 8.3 se tiene que
Z d
Z d
Z d Z a+n
F (y) dy =
lim Fn (y) dy = lim
f (x, y) dx dy
c
c n→∞
Z a+n Z d
= lim
n→∞ a
n→∞ c
a
Z
∞ Z d
f (x, y) dy dx =
f (x, y) dy dx.
c
a
c
Teorema 10.56. Si las funciones F y G están definidas mediante
Z ∞
Z ∞
F (y) =
f (x, y) dx,
G(y) =
fy (x, y) dx
a
a
donde ambas f y su derivada parcial fy son continuas en [a, ∞[×[c, d] y la
convergencia de las integrales impropias G(y) es uniforme en [c, d] entonces
F es diferenciable en [c, d] y
Z ∞
Z ∞
d
0
f (x, y) dx = F (y) = G(y) =
fy (x, y) dy.
dy a
a
Prueba: Una vez más definimos las Fn como antes. Por el Teorema 8.6
Z a+n
0
Fn (y) =
fy (x, y) dx
a
las cuales convergen uniformemente a G(y) en [c, d]. Por el Teorema 9.14,
como la función F está definida en cada punto y ∈ [c, d], la función F es
diferenciable en [c, d] y F 0 (y) = G(y).
132 10 Integrales impropias
10.3 Integrales impropias con un parámetro
Para terminar esta sección veremos un resultado que nos será de utilidad.
Ejemplo 10.57. Considere la función
Z ∞
sen yx
F (y) :=
e−x
dx.
x
0
Primero note que f (x, y) = e−x senxyx y fy (x, y) = e−x cos xy son continuas
para x en [0, ∞[, donde la primera la redefinimos adecuadamente en x = 0.
Segundo, las integrales impropias
Z ∞
e−x cos xy dx
G(y) =
0
convergen uniformemente en [0, ∞[ pues
Z
Z ∞
−x
≤
e
cos
xy
dx
b
∞
e−x dx.
b
Por el resultado anterior, F es diferenciable y F 0 (y) = G(y).
Ahora |F (y)| está dominada por
Z ∞ −x
e
dx,
x
1
por lo cual las integrales impropias F (y) convergen uniformemente en [0, ∞[.
Mediante integración por partes se tiene que
b
Z b
−x
−x y sen xy − cos xy e cos xy dx = e
2
1+y
0
0
y
sen
by
−
cos
by
1
= e−b
+
.
2
1+y
1 + y2
Al tomar b → ∞ se concluye que
Z ∞
F 0 (y) =
e−x cos xy dx =
0
1
,
1 + y2
Más aún, como F (0) = 0 se tiene que
Z ∞
sen xy
dx = arctan y,
e−x
x
0
∀ y ≥ 0.
y > 0.
Al cambiar la variable u = xy y s = 1/y se obtiene
Z ∞
sen x
1
dx = arctan ,
∀s > 0.
e−sx
x
s
0
Con r = 1/s,
Z ∞
Z ∞
sen(rx)
sen x
e−x
dx =
e−x/r
dx = arctan r,
x
x
0
0
∀r > 0.
10 Integrales impropias
10.3 Integrales impropias con un parámetro 133
Ejemplo 10.58. Usemos ahora el resultado del ejempo anterior para mostrar
que
Z ∞
sen x
π
dx = .
x
2
0
Sabemos dicha integral es convergente, nuestra intención es tomar r → ∞
en la última relación.
Vamos a utilizar el Ejercicio 4.52, para la función f (x) = (1 − e−x )/x,
la cual se puede redefinir en x = 0 para obtener una función con derivada
continua. Para b > 0, usando el cambio de variable x = ru, tenemos
Z ∞
Z ∞
sen rx
sen x
e−x
dx −
dx
x
x
0
0
Z b
Z ∞
Z ∞
Z rb
sen x
sen rx
sen x
−x sen rx
dx −
e
dx +
dx −
e−x
dx
=
x
x
x
x
0
rb
b
0
Z b
Z ∞
Z ∞
(1 − e−x )
sen x
sen rx
=
sen rx
dx +
dx −
e−x
dx.
x
x
x
0
rb
b
Al tomar r → ∞ concluimos que
Z ∞
Z ∞
π 1
sen x
dx − ≤
dx,
x
2
xex
b
0
∀b > 0,
de lo cual se obtiene el resultado.
10.3.1. Ejercicios.
Ejercicio 10.1. Complete la demostración del Corolario 10.10.
Ejercicio 10.2. Dé un ejemplo de una integral impropia que es convergente
pero no absolutamente convergente.
Ejercicio 10.3. Sean f, g, h funciones definidas en [a, ∞[. Muestre que si
f ≤ g ≤ h son Rfunciones Riemann
R ∞ integrables en cualquier intervalo
R ∞ de la
∞
forma [a, b] con a f (x) dx y a h(x) dx convergentes, entonces a g(x) dx
es convergente.
Ejercicio 10.4. ¿Hasta que punto es posible remover la hipótesis de positividad de f y g en el Corolario 10.10? Enuncie y demuestre su resultado.
Ejercicio 10.5. Haciendo uso del Ejercicio 4.48 trate de sustituir la hipótesis
f continua por f Riemann integrable en los Lemas 10.18 y 10.20.
Ejercicio 10.6. Sea f : [a, ∞[→ R una función Riemann integrable en
Rb
cualquier intervalo de la forma [a, b] tal que a |f (x)| dx ≤ K para todo
≥ a. Si g es decreciente en [a, ∞[ con limx→∞ g(x) = 0 muestre que
Rb ∞
a f (x)g(x) dx es absolutamente convergente.
134 10 Integrales impropias
10.3 Integrales impropias con un parámetro
Ejercicio 10.7. Sea f : [a, ∞[→ R una función no negativa y Riemann
inR∞
tegrable en cualquier intervalo de la forma [a, b]. Demuestre que a f (x) dx
R b
es convergente si y solo si el conjunto
a f (x) dx : b ≥ a es acotado.
Además muestre que
Z b
Z ∞
f (x) dx = sup
f (x) dx : b ≥ a .
a
a
Ejercicio 10.8. Criterio de Weierstrass. Sea f : [a, ∞[→ R una
función Riemann integrable en todo intervalo de la forma [a, b]. Suponga
que existe M > 0 tal que
Z b
|f (x)| dx ≤ M,
∀ b > a.
a
R∞
Muestre que a f (x) dx es absolutamente convergente.
Ejercicio 10.9. Sean f, g : [a, ∞[→ R dos funciones Riemann integrables
en cualquier Rintervalo de la forma [a, b]. Si |f (x)| ≤ Rg(x) para todo x ≥ a
∞
∞
muestre que a f (x), dx es convergente siempre que a g(x) dx es convergente.
R∞
Ejercicio 10.10. Muestre que si a f (x) dx es convergente y limx→∞ f (x)
existe, debe tenerse que limx→∞ f (x) = 0. Más aún, si además f es monótona
muestre que también se tiene limx→∞ xf (x) = 0. R
∞
Dé un ejemplo de una función f de modo tal que a f (x) dx sea convergente, pero que limx→∞ f (x) no exista.
Ejercicio 10.11. Muestre que Γ(α + 1) = αΓ(α) para α > 1.
Ejercicio 10.12. Para p > 1, analice la convergencia (absoluta) de las
integrales impropias
Z ∞
Z ∞
sen x
cos x
1.
dx,
2.
dx.
p
x
xp
1
1
¿Qué podemos decir para p = 1? Compare con el Ejemplo 10.19.
Ejercicio 10.13. Para p > 0, analice la convergencia de la integral impropia
Z ∞
1
sen p dx.
x
1
Sugerencia: 1/x es suficientemente pequeño para x suficientemente grande.
Recuerde que
sen a
lim
= 1.
+
a
a→0
Ejercicio 10.14. Analice la convergencia de
Z ∞
sen x2 dx.
1
Sugerencia: u =
x2 .
10 Integrales impropias
10.3 Integrales impropias con un parámetro 135
Ejercicio 10.15. Analice la convergencia de las integrales impropias
Z ∞
Z ∞
ln x
1
1.
dx,
2.
p dx.
1+p
x
x
ln
x
2
2
Ejercicio 10.16. ¿Para qué valores de p y q son convergentes (absolutamente) las siguientes integrales?
Z ∞
Z ∞
xp
sen xp
1.
dx,
2.
dx,
1 + xq
x
1
1
Z ∞
Z ∞
1 − cos x
sen px sen qx
3.
dx,
4.
dx.
p
x
x
1
1
Ejercicio 10.17. Sean p(x) y q(x) polinomios de grados m y n respectivamente.
a. Discuta la convergencia ó divergencia de
Z ∞
p(x)
dx
q(x)
a
donde a es mayor que cualquier cero de q(x).
b. Discuta la convergencia ó divergencia de
Z ∞
p(x)
dx.
−∞ q(x)
Ejercicio 10.18. Use el Ejercicio 5.6 para estudiar para n un entero positivo
Z ∞
1
dx.
(1
+
x2 )n
0
Ejercicio 10.19. Un ejemplo que nos permite desligar la intuición de la
verdad es el conocido como “la trompeta de Gabriel”. En la sección sobre
aplicaciones de la integral de Riemann aprendimos que el área y el volumen
de una superficie y de un sólido de revolución, obtenidos al girar el gráfico
de una función f en un intervalo [a, b], están dados respectivamente por
Z b
Z b
p
πf (x)2 dx
y
A=
2πf (x) 1 + (f 0 (x))2 dx.
V =
a
a
Considere la función f (x) = 1/x definida en el intervalo [1, ∞[. Si hacemos
uso de las fórmulas anteriores en el intervalo [a, ∞[, utilizando la noción de
integración impropia, obtenemos
s Z ∞
Z ∞
−1 2
1
1
V =
dx.
π 2 dx
y
A=
2π
1+
x
x
x2
1
1
Muestre que V es convergente pero A es divergente. Es decir, hemos encontrado una “trompeta infinita” que podrı́amos llenar de pintura pero que no
podrı́amos pintar. ¿Para qué valores de p la función f (x) = 1/xp experimenta el mismo fenómeno en el intervalo [1, ∞[? ¿Existe algún valor p para
el cual la función f (x) = 1/xp satisface V es divergente y A es convergente
136 10 Integrales impropias
10.3 Integrales impropias con un parámetro
en el intervalo [1, ∞[? ¿Existe alguna función f para la cual V es divergente
y A es convergente en el intervalo [a, ∞[?
Ejercicio 10.20. Demuestre el Lema 10.28.
Ejercicio 10.21. Muestre que si f : R → R es par y Riemann integrable en
todo intervalo de la forma [a, b] entonces, la convergencia
en valor principal
R∞
de la integral de f implica la convergencia de −∞ f (x) dx y que en este caso
Z ∞
Z ∞
f (x) dx = vp
f (x) dx.
−∞
−∞
Ejercicio 10.22. Escriba la prueba de la Proposición 10.33.
R1
Ejercicio 10.23. ¿Porqué 0 sen x1 dx es absolutamente convergente?
Ejercicio 10.24. Demuestre el Corolario 10.38.
Ejercicio 10.25. Demuestre el Lema 10.39.
Ejercicio 10.26. Demuestre que (7) es independiente del valor de c.
Ejercicio 10.27. Demuestre que (8) es independiente del valor de c.
Ejercicio 10.28. Demuestre el Lema 10.52.
Ejercicio 10.29. Muestre que si f : [−a, a] → R es par y Riemann integrable en [−a, −b] ∪ [b, a] para todo 0 < b < a entonces, la convergencia
en
Ra
valor principal de la integral de f implica la convergencia de −a f (x) dx y
que en este caso
Z a
Z a
f (x) dx = vp
f (x) dx.
−a
−a
Ejercicio 10.30. Dé un ejemplo de una integral impropia de segunda especie
que es convergente pero no absolutamente convergente.
Ejercicio 10.31. Sean f, g, h funciones definida en [a, b[. Muestre que si
f ≤ g ≤ h son funciones Riemann integrables en cualquier intervalo de la
Rb
Rb
forma [a, c] con a < c < b y si a f (x) dx y a h(x) dx convergentes, entonces
Rb
a g(x) dx es convergente.
Ejercicio 10.32. Enuncie y demuestre un criterio similar al criterio de
Weierstrass para la convergencia absoluta, en este caso, para integrales impropias de segunda especie.
Ejercicio 10.33. Enuncie y demuestre el resultado equivalente al Ejercicio 10.9 para integrales impropias del segundo tipo.
Ejercicio 10.34. Muestre que si f : [−a, a] → R es par y Riemann integrable en [−a, −b] ∪ [b, a] para todo 0 < b < a entonces, la convergencia
en
Ra
valor principal de la integral de f implica la convergencia de −a f (x) dx y
que en este caso
Z a
Z a
f (x) dx = vp
f (x) dx.
−a
−a
10 Integrales impropias
10.3 Integrales impropias con un parámetro 137
Ejercicio 10.35. Repita el ejercicio sobre la “trompeta de Gabriel”, ahora
para integrales impropias de segunda especie.
Ejercicio 10.36. ¿Para qué valores de p y q son convergentes (absolutamente) las siguientes integrales?
Z 1
Z 1
p
q
xp senq x dx,
x (1 − x) dx,
2.
1.
0
0
Z
3.
1
Z
(− ln x)p dx,
4.
0
1
xp (− ln x)q dx.
0
Ejercicio 10.37. Utilice el criterio de comparación mediante lı́mite, el teorema de Taylor (ó los desarrollos limitados) y el ejercicio anterior para
estudiar la convergencia de las siguientes integrales impropias.
Z 1
Z 1
p
q
1.
arctan x (1 − sen x) dx,
2.
(ex − 1)p (ln(1 + x))q x dx,
0
Z
3.
0
π/2
Z
p
ln sen x dx,
4.
0
1
(1 − cos x)p (− ln senh x)q dx.
0
Ejercicio 10.38. Muestre que el área encerrada por la curva |x4 − y 4 | = 1
es finita.
Ejercicio 10.39. Encuentre el área entre los gráficos de f (x) = ex y g(x) =
2 cosh x en el intervalo [0, ∞[.
Ejercicio 10.40. ¿Para qué valores de α existe c tal que
Z c
Z ∞
1
1
dx
=
dx?
α
1 + xα
0 1+x
c
Ejercicio 10.41. Criterio de Weierstrass para convergencia uniforme de integrales impropias dependientes de un paŕametro. Sea
f : [a, ∞[×[c, d] → R una función tal que f (x, y) es Riemann integrable
en [a, b] para cada y fijo y todo b > a. Suponga que existe una función
M R: [a, ∞[→ [0, ∞[ tal que |f (x, y)| ≤ M (x) para todo (x, y) ∈ [a, ∞[×[c, d].
∞
Si a M (x) dx es convergente muestre que
Z ∞
F (y) =
f (x, y) dy
a
es uniformemente convergente en [c, d] y que para cada y fijo en [c, d] la
integral impropia F (y) es absolutamente convergente.
Ejercicio 10.42. Criterio de Dirichlet para convergencia uniforme
de integrales impropias dependientes de un paŕametro. Sea f :
[a, ∞[×[c, d] → R una función tal que f (x, y) es Riemann integrable en [a, b]
para cada y fijo y todo b > a. Suponga que existe una constante M > 0 tal
138 10 Integrales impropias
10.3 Integrales impropias con un parámetro
que para todo b ≥ a y todo y ∈ [c, d] se tiene
Z b
≤ M.
f
(x,
y)
dx
a
Si existe una función g : [a, ∞[×[c, d] → R tal que para cada y fijo en
[c, d] la función g(x, y) es decreciente en [a, ∞[ y además g converge a cero
uniformemente para y ∈ [c, d] cuando x → ∞, muestre que
Z ∞
F (y) =
f (x, y)g(x, y) dy
a
es uniformemente convergente en [c, d].
Ejercicio 10.43. Muestre que para 0 < a < b :
Z ∞ −ax
e
− e−bx
b
ln =
dx.
a
x
0
R∞
Sugerencia: 1/t = 0 e−tx dx.
Ejercicio 10.44. Muestre que
Z ∞
0
cos ty
π
dy = e−|t| .
2
1+y
2
Ejercicio 10.45. Haciendo uso del Ejemplo 10.57 calcule
Z ∞
Z ∞
sen tx
sen x cos tx
1.
dx,
2.
dx,
x
x
0
0
Z
∞
3.
0
Z
sen x sen tx
dx,
x
∞
4.
0
sen2 x
dx.
x2
Ejercicio 10.46. Verifique que la función Gamma
Z ∞
Γ(α) :=
e−x xα−1 dx
0
del Ejemplo 10.15 es continua. ¿Cuál es el mayor intervalo en el que dicha
función se puede definir y ser continua?
Ejercicio 10.47. Considere la función f : [0, ∞[×[0, ∞[→ R definida mediante
−y
e /y si y ≥ x y y 6= 0,
f (x) =
0 si y < x.
Muestre que las integrales iteradas existen, que
Z ∞Z ∞
Z ∞Z ∞
f (x, y) dx dy =
f (x, y) dy dx,
0
y calcule su valor.
0
0
0
10 Integrales impropias
10.3 Integrales impropias con un parámetro 139
Proyecto 10.59. La transformada de Laplace. Para una función f :
[0, ∞[→ R se define su transformada de Laplace como la función
Z ∞
Lf (s) :=
e−st f (t) dt
0
siempre que dicha integral impropia de parámetro s exista. El resto de los
ejercicios de esta sección forman parte del proyecto en el cual exploramos
las propiedades de la transformada de Laplace.
Ejercicio 10.48. Muestre que si f es acotada entonces L(f (t))(s) existe
para todo s > 0.
R∞
Ejercicio 10.49. Muestre que si f es positiva y 0 f es convergente entonces L(f (t))(s) existe para todo s ≥ 0.
Rb
Ejercicio 10.50. Muestre que si | a f (t) dt| son acotadas para todo 0 <
a < b entonces L(f (t))(s) existe para todo s > 0.
Ejercicio 10.51. Muestre que
L((f + cg)(t))(s) = L(f (t))(s) + cL(g(t))(s)
siempre que todas las integrales impropias involucradas existan.
Ejercicio 10.52. Sea f una función continua tal que para cada n ∈ N existe
N = N (n) ∈ N para el cual la función tn f (t) es acotada en el intervalo
[N, ∞[. Muestre que para s ∈ [a, b] con a > 0 se tiene
Z ∞
Z ∞
dn s
−st
n
e−st tn f (t) dt,
e f (t) dt = (−1)
dsn 0
0
donde las derivadas se toman con respecto a la variable s.
Sugerencia: hágalo primero para n = 1.
Ejercicio 10.53. Muestre que si f es una función tal que todas las f (k) (t)
son continuas en t = 0 para k = 0, 1, 2, . . . , n entonces,
L(f (n) (t))(s) = sn L(f (t))(s) − sn−1 f (0) − sn−2 f 0 (0) − · · · − f (n−1) (0)
siempre que todas las integrales impropias involucradas existan. Escriba el
caso particular n = 1.
Ejercicio 10.54. Muestre que
Z
L(f (t)/t)(s) =
∞
L(f (t))(σ) dσ,
s
siempre que todas las integrales impropias involucradas existan.
Ejercicio 10.55. Muestre que
L(f (at))(s) = L(f (t))(s/a)/a,
a > 0,
siempre que todas las integrales impropias involucradas existan.
140 10 Integrales impropias
10.3 Integrales impropias con un parámetro
Ejercicio 10.56. Muestre que
L(eat f (t))(s) = L(f (t))(s − a),
s > a,
siempre que todas las integrales impropias involucradas existan.
Ejercicio 10.57. Defina la función u : R → {0, 1} mediante u(t) = 0 si
t < 0 y u(t) = 1 si t ≥ 0. Muestre que
L(f (t − a)u(t − a))(s) = e−as L(f (t))(s)
siempre que todas las integrales impropias involucradas existan, donde a es
una constante positiva.
Ejercicio 10.58. Si f es una función periódica de periodo p > 0, muestre
que siempre que todas las integrales impropias involucradas existan se tiene
la relación
Z p
1
L(f (t))(s) =
e−st f (t) dt.
1 − e−ps 0
Ejercicio 10.59. Muestre que si L(f (t))(s) existe entonces
lim f (t) = lim sL(f (t))(s)
y
s→∞
t→0+
lim f (t) = lim sL(f (t))(s).
t→∞
s→0+
Ejercicio 10.60. Defina la convolución f ∗g de dos funciones f y g mediante
Z
(f ∗ g)(t) :=
t
f (x)g(t − x) dx.
0
Muestre que (f ∗ g)(t) = (g ∗ f )(t).
Ejercicio 10.61. Muestre que
Z
L
x
f (t) dt (s) = L((u ∗ f )(t))(s) = L(f (t))(s)/s.
0
Ejercicio 10.62. Para completar la lista de propiedades de la transformada
de Laplace debemos incluir la fórmula
L((f ∗ g)(t))(s) = L(f (t))(s)L(g(t))(s).
La demostración involucra integrales impropias dobles que no son parte de
este curso en su versión actual, por lo cual invitamos al lector a visitar la
bibliografı́a.
10 Integrales impropias
10.3 Integrales impropias con un parámetro 141
Ejercicio 10.63. Verifique las siguientes transformadas de Laplace.
1. L (t − a)n e−b(t−a) u(t − a)/n! (s) = e−as /(s + b)n+1 , s > 0, n ∈ N.
2. L tn /n! (s) = 1/sn+1 , s > 0, n ∈ N.
3. L tq /Γ(q + 1) (s) = 1/sq+1 , s > 0, q ∈ R.
4. L 1 (s) = 1/s, s > 0.
5. L u(t − a) (s) = e−as /s, s > 0.
6. L t (s) = 1/s2 , s > 0.
7. L tn e−at /n! (s) = 1/(s + a)n+1 , s > −a, n ∈ N.
8. L (1 − e−at ) (s) = a/(s(s + a)), s > 0.
9. L sen(ωt) (s) = ω/(s2 + ω 2 ), s > 0.
10. L cos(ωt) (s) = s/(s2 + ω 2 ), s > 0.
11. L senh(at) (s) = a/(s2 − a2 ), s > |a|.
12. L cosh(at) (s) = s/(s2 − a2 ), s > |a|.
13. L eat sen(ωt) (s) = ω/((s − a)2 + ω 2 ), s > a.
14. L eat cos(ωt) (s) = (s − a)/((s − a)2 + ω 2 ), s > a.
√
1
n
−(n+1)/n
15. L t (s) = s
Γ 1+
, s > a, n ∈ N.
n
t0
16. L ln (t/t0 ) (s) = − ln(t0 s) + γ, s > a, n ∈ N.
s
En la última fórmula,
"
γ = lim
n→∞
n
X
1
k
!
#
Z
∞
− ln(n) =
1
k=1
1
1
−
bxc x
dx.
Quizá lo que hace la transformada de Laplace útil es el hecho de que en
cierta medida es posible recobrar f a partir de L(f ). De hecho, bajo condiciones mı́nimas en f y g es posible mostrar que si L(f (t))(s) = L(g(t))(s)
entonces f (t) = g(t) en todos aquellos puntos en los que f y g son continuas.
Este resultado, junto con la tabla anterior permiten múltiples aplicaciones
de la transformada de Laplace. Como una pequeña muestra tenemos los
siguientes ejercicios.
Ejercicio 10.64. Resuelva el problema de valores iniciales
u00 − 5u0 + 6u = f,
u(0) = A,
u0 (0) = B.
Ejercicio 10.65. Para una constante a resuelva la ecuación integral
Z t
u(t) + a
es−t u(s) ds = f (t).
0
142
11. Series numéricas
En este capı́tulo estudiamos el concepto de serie numérica. La idea es
dar sentido a una suma infinita de números. Al sumar una cantidad finita
de números, la asociatividad implica que el resultado es independiente del
orden en el cual los sumandos sean seleccionados. Uno de los fenómenos
más interesantes al sumar una cantidad infinita de sumandos, es el hecho de
que en algunos casos, sumar en diferentes ordenes va a producir diferentes
resultados.
Un caso trivial se obtiene de la sucesión de números
1, −1, 1, −1, 1, −1, . . .
Por ejemplo,
(1 + −1) + (1 + −1) + (1 + −1) + · · · = 0 + 0 + 0 + · · · = 0.
Ó bien
1 + (−1 + 1) + (−1 + 1) + (−1 + 1) + · · · = 1 + 0 + 0 + 0 · · · = 1.
En la Proposición 11.18 veremos como es posible obtener cualquier valor
como resultado de un reordenamiento adecuado de una serie numérica (siempre que la misma sea convergente pero no absolutamente convergente).
Todo esto nos lleva a poner especial atención a lo que entendemos por
suma cuando sumamos una cantidad infinita de números.
11.1. Convergencia de series numéricas.
Definición 11.1. Dada una sucesión numérica (an )n se define como la sucesión de sumas parciales a la sucesión (sn )n definida mediante
s0 = a0 ,
s1 = a0 + a1 = s0 + a1 ,
s2 = a0 + a1 + a2 = s1 + a2 ,
...
sn = a0 + a1 + a2 + · · · + an = sn−1 + an ,
··· .
Como toda sucesión numérica, la sucesión de sumas parciales tiene dos posibilidades, converger o divergir. En caso de convergencia se dice que la serie
numérica
∞
X
an
n=0
es convergente y en dicho caso
∞
X
n=0
an = lim sn .
n→∞
En caso contrario se dice que dicha serie es divergente.
11 Series numéricas
11.1 Convergencia de series numéricas
143
Ejemplo 11.2. La sucesión alternante an = (−1)n tiene por sumas parciales
la sucesión alternante sn = (1 + (−1)n )/2. En detalle
s0 = 1, s1 = 0, s2 = 1, . . . , s2k = 1, s2k+1 = 0, . . .
P
De este modo la sucesión (sn )n es divergente por lo cual la serie (−1)n es
divergente.
P
P∞
En el ejemplo anterior usamos la abreviación an para denotar n=0 an .
Esta costumbre la vamos a usar con frecuencia siempre que no se preste a
confusión.
Ejemplo 11.3. Dado que
1 + a + a2 + · · · + an =
1 − an−1
1
→n→∞
1−a
1−a
siempre que −1 < a < 1, tenemos que
∞
X
an =
n=0
1
.
1−a
A la serie anterior se le conoce como serie geométrica. No es difı́cil verificar
que dicha serie es divergente si a ≤ −1 ó 1 ≤ a.
Ejemplo 11.4. Un tipo particular de series son las llamadas telescópicas.
Dichas series se pueden escribir en la forma
X
an+1 − an .
Sus sumas parciales están dadas por
sn = (a1 − a0 ) + (a2 − a1 ) + · · · + (an − an−1 ) = an − a0
por lo cual dicha serie es convergente si y solo si limn→∞ an = 0. En caso
de convergencia, el valor de convergencia está dado precisamente por −a0 .
Por ejemplo
∞
∞
X
X
1
1
1
=
− = 1.
2
n −n
n−1 n
n=2
n=2
Nota. Dado que hemos definido el valor de convergencia de una serie como
el lı́mite de una sucesión, es de esperar que muchos de los resultados sobre
lı́mites deP
sucesiones
P se adapten mutatis mutandis, a series. Por ejemplo,
Pn que
las series
a
y
b
sea
convergentes
implica
que
los
lı́mites
lim
n
n
k=0 ak
Pn n
y limn k=0 bk existen, por lo cual, para todo número real c se tiene
∞
X
n
X
(an + c bn ) = lim
(ak + c bk )
n=0
n
= lim
n
k=0
n
X
k=0
ak + c lim
n
n
X
k=0
bk =
∞
X
n=0
an + c
∞
X
n=0
bn .
144
11 Series numéricas
11.1 Convergencia de series numéricas
UnPejemplo más elaborado
nos permite multiplicar series. Si los lı́mites
P
limn nk=0 ak y limn nk=0 bk existen, se tiene que
∞
X
n=0
an
∞
X
bn = lim
n
n=0
n
X
k=0
ak lim
n
n
X
bk = lim
n
k=0
n
X
ak
k=0
n
X
bk = lim
n
k=0
n
X
aj bk
j,k=0
= lim a0 b0 + a0 b1 + · · · + a0 bn + · · · + an b0 + an b1 + · · · an bn .
n
♦
A continuación vemos un criterio que va a ser muy útil, en particular para
determinar cuando una serie es divergente.
P
Lema 11.5. Criterio de Cauchy. La serie
an es convergente si y solo
si para todo ε > 0 existe N ∈ N tal que
|an + an+1 + · · · + am | < ε,
∀ m > n ≥ N.
P
Prueba: Por definición, la serie
an es convergente si y solo si la sucesión
de sumas parciales sn es convergente. Toda sucesión (de números reales) es
convergente si y solo si es de Cauchy, esto es, si y solo si para todo ε > 0
existe N ∈ N tal que
|sn−1 − sm | = |an + an+1 + · · · + am | < ε,
∀m ≥ n ≥ N.
P
Corolario 11.6. Si la serie
an converge entonces lim aP
n = 0. Al tomar la
contrapositiva se tiene que si lim an 6= 0 entonces la serie an es divergente.
Prueba: Basta tomar m = n + 1 en el lema anterior.
Ejemplo 11.7. Las series
X
X
arctan n,
(−1)n ,
X
sen(nπ/2),
X
n ln(1/n)
son divergentes.
El recı́proco del resultado anterior no es cierto. Hay series
divergentes a pesar de que lim an = 0.
P
an que son
Ejemplo 11.8. La serie armónica
∞
X
1
n
n=1
es divergente. Para mostrarlo usamos el criterio de Cauchy. Si tomamos
m = 2n se tiene que
1
1
1
1
1
1
1
1
n
1
+
+···+
= +
+···+
≥ +
≥ .
n n+1
n+n
n n 1 + 1/n
1+1
n 2n
2
Por lo tanto dicha serie es divergente.
11 Series numéricas
11.1 Convergencia de series numéricas
145
Nota. Una posible motivación para nuestra definición del valor de convergencia de una serie, se puede extraer de la siguiente interpretación geométrica. Dada una sucesión numérica (an )n podemos definir una función
f : [0, ∞[→ R mediante f (x) := an para x ∈ [n, n + 1[. El valor de la suma
R N +1
P
parcial N
f (x) dx coinciden.
♦
n=0 ak y el valor de la integral 0
Dado que ya poseemos un conocimiento considerable sobre integrales impropias, podemos utilizar una aproximación geométrica a las series. El próximo resultado se encuentra precisamente en esta lı́nea de ideas. En este
caso, imaginamos una sucesión de rectángulos, cada uno junto al siguiente,
con base 1 y altura an ≥ 0.
Lema 11.9. Sea f : [1, ∞[→ R una función positiva y decreciente. Entonces
Z ∞
∞
X
f (x) dx
f (n)
y
1
n=1
son ambas convergentes ó ambas divergentes.
Prueba: Como f es decreciente se tiene que f (n + 1) ≤ f (x) ≤ f (n) para
todo x ∈ [n, n + 1] y todo n = 1, 2, 3, . . . . De este modo, como f es positiva
Z m
f (n) + · · · + f (m − 1) ≤
f (x) dx ≤ f (n + 1) + · · · + f (m),
n
para todo par de enteros positivos m > n. El resultado se concluye de los
criterios de Cauchy para integrales impropias y series.
Ejemplo 11.10. Como
∞
X
1
np
n=1
Z
y
1
∞
1
dx
xp
poseen el mismo comportamiento, se concluye que las p-series convergen si
p > 1 y divergen si p ≤ 1.
Al igual que con integrales impropias, una forma muy conveniente para
determinar la convergencia o divergencia de una serie es compararla con otra
serie de la cual ya conocemos el comportamiento.
Lema 11.11. Criterio de comparación. Sean (an )n y (bn )n dos sucesiones tales que 0 ≤ an ≤ bn para todo n.
P
P
(1) Si
an es divergente entonces
bn es divergente.
P
P
(2) Si
bn es convergente entonces
an es convergente y
X
X
an ≤
bn .
La prueba se obtiene del criterio de Cauchy y se deja como Ejercicio 11.2
para el lector.
146
11 Series numéricas
11.2 Convergencia absoluta y condicional
Ejemplo 11.12.
X 1
1
≤
.
n5/2
1 + n5
Con p = 5/2 > 1 sabemos que la segunda serie converge por lo cual la
primera también converge.
0≤
X
√
El siguiente resultado generaliza el lema anterior:
Lema 11.13. Criterio de comparación mediante lı́mite. Sean (an )n
y (bn )n dos sucesiones positivas.
(1) Si
an
lim
=l>0
n→∞ bn
P
P
entonces ó ambas series
an y
bn son convergentes ó ambas son
divergentes.
(2) Si
an
lim
= +∞
n→∞ bn
P
P
entonces
si
an es convergente seP
tiene que
bn es convergente, y
P
si
bn es divergente se tiene que
an es divergente.
(3) Si
an
lim
=0
n→∞ bn
P
P
entonces
si
an es divergente se P
tiene que
bn es divergente, y si
P
bn es convergente se tiene que
an es convergente.
La demostración se deja como Ejercicio 11.3 para el lector.
Ejemplo 11.14. Como
√ 1
2
lim n1−n
n→∞
n
la serie
P
= 1,
√
1/ n2 − n dx es divergente, donde claro está, n ≥ 2.
11.2. Convergencia absoluta y condicional. Una forma de lidiar con
series que no son positivas es considerar su valor absoluto. Para que esta
idea tenga sentido, es necesario relacionar la serie con la serie de valores
absolutos. Como un corolario al criterio de comparación, y a partir de la
desigualdad triangular se tiene:
P
P
Corolario 11.15. Si
|an | es convergente entonces,
an es convergente.
P
Definición
11.16.
Si
|an | es convergente entonces entonces decimos que
P
an es absolutamente convergente.
Ejemplo 11.17. La serie
qué?
P
cos n/n2 es absolutamente convergente. ¿Por
11 Series numéricas
11.2 Convergencia absoluta y condicional
147
Cuando sumamos una cantidad finita de números reales, gracias al axioma
de asociatividad, el resultado es independiente del orden en que los números
sean sumados. El siguiente resultado muestra que dicha conclusión es falsa
en general si sumamos una cantidad infinita (contable) de números.
P
Proposición 11.18. Si
an converge pero no absolutamente, entonces
paraP
cualquier número s ∈ R existe un reordenamiento (bn )n de (an )n tal
que
bn = s.
P
P
Prueba: Por el Ejercicio 11.11 ambas series
pn y
qn de términos positivos y negativos respectivamente son divergentes. Sin pérdida de
P generalidad suponga que s > 0. Como la serie de términos positivos
pn es
divergente podemos tomar el primer N1 de modo tal que
NX
1 −1
pn ≤ s <
n=1
N1
X
pn =: s1 .
s1 − s < pN1 .
Ası́
n=1
Recuerde que los qn son negativos, por lo cual tiene sentido tomar M1 de
modo que
t1 := s1 +
M1
X
qn < s ≤ s 1 +
M
1 −1
X
n=1
qn .
s − t1 < −qM1 .
Ası́
n=1
Una vez más, usando que los pn son positivos, y los qn son negativos, tenemos
t1 +
NX
2 −1
N2
X
pn ≤ s < t1 +
Ası́
s2 − s < pN2 .
Ası́
s − t2 < −qM2 .
pn =: s2 .
n=N1 +1
n=N1 +1
Y
M2
X
t2 := s2 +
qn < s ≤ s 2 +
n=M1 +1
M
2 −1
X
qn .
n=M1 +1
Continuando con este proceso de agregar sumas de los pn y quitar sumas
de los qn obtenemos sucesiones (Nk )k y (Mk )k tales que
tk−1 +
NX
k −1
Nk
X
pn ≤ s < tk−1 +
n=Nk−1 +1
pn =: sk .
Ası́
sk − s < pNk ,
n=Nk−1 +1
y
tk := sk +
Mk
X
n=Mk−1 +1
qn < s ≤ s k +
M
k −1
X
qn .
Ası́
s − tk < −qMk .
n=Mk−1 +1
Dichas sucesiones producen un reordenamiento p1 , p2 , . . . , pN1 , q1 , q2 ,
. . . , qM1 , pN1 +1 , pN1 +2 , . . . , pN2 , qM1 +1 , qM1 +2 , . . . , qM2 , . . . de la sucesión
(an )n , digamos (bn )n .
Observe como por la construcción anterior, las sumas parciales de este
reordenamiento crecen hasta s1 luego decrecen hasta t1 , para volver a crecer
hasta s2 y entonces decrecer hasta t2 , etc.
148
11 Series numéricas
11.2 Convergencia absoluta y condicional
P
Nuestro objetivo es mostrar
bn converge a s, para lo cual
Pnque la serie
veremos que las diferencias | j=1 bj − s| converge a cero.
P
Si el término bn está entre pNk y qMk −1 se tiene que tk < nj=1 bj < sk ,
por lo cual
X
n
bj − s < sk − tk < (sk − s) + (s − tk ) < pNk − qMk −1 .
j=1
y qMk son miembros de la sucesión original (an )n de la serie
Como los pNP
k
convergente
an , sabemos que ambos tienden a cero conforme k tiende a
infinito.
P
Si el término bn está entre qMk y pNk+1 −1 se tiene que tk < nj=1 bj < sk+1 ,
por lo cual
X
n
bj − s < sk+1 − tk < (sk+1 − s) + (s − tk ) < pNk+1 − qMk ,
j=1
que también tiende a cero conforme k tiende a infinito, lo cual concluye el
resultado.
En contraste, uno de los conceptos más interesantes relacionados a la
convergencia absoluta
P es la independencia de reordenamientos. Es decir, el
valor de la serie
an es independiente del orden en que los términos an
sean sumados.
P
Proposición 11.19. Independencia de los reordenamientos. Si
an
converge absolutamente
entonces,
para
cualquier
reordenamiento
(b
)
de
n
n
P
(an )P
la
serie
b
es
absolutamente
convergente
y
converge
al
mismo
valor
n
n
que
an .
PN
PN
a
y
t
=
Prueba: Denote
mediante
s
=
n
N
N
n=1 |an | las sumas parn=1
P
P
ciales de
an y
|an | respectivamente. Dado ε > 0 existe N ∈ N tal
que
∞
∞
X
X
an − sN < ε
y
|an | − tN < ε.
n=1
n=1
PN
Dado un reordenamiento (bn )P
n de (an )n , denote mediante uN =
n=1 bn
las sumas parciales de la serie
bn . Elija M lo suficientemente grande para
tener que los a1 , . . . , aN aparecen entre los b1 , . . . , bM . Siempre que m ≥ M ,
al tomar la diferencia um − sN , los a1 , . . . , aN se cancelan y se obtiene
|um − sN | ≤ |aN +1 | + |aN +2 | + · · · ,
por lo cual
∞
∞
X
X
a
−
u
≤
a
−
s
n
m
n
N + |sN − um | < 2ε.
n=1
n=1
P
P
P
Lo anterior demuestra que
bn es convergente y que
bn =
an .
11 Series numéricas
11.3 Series de productos y series alternantes
149
Para concluir la convergencia absoluta, aplicamos el mismo razonamiento
P
a la serie de términos positivos y a la serie de términos negativos de
an
en forma separada. DePeste modo, las series de términos positivos
y
P de
términos negativos de
bn son ambas convergentes, por lo cual
bn es
absolutamente convergente. Los detalles de este último argumento se dejan
como Ejercicio 11.14 para el lector.
11.3. Series de productos y series alternantes. Al igual que con integrales impropias, muchas
Pveces nos vamos a encontrar series dadas por el
producto de sucesiones
an bn . De este modo, los criterios de Dirichlet y
Abel, ahora escritos para series, nos ayudan a estudiar este tipo de integrales. La idea básica es la misma, si (bn )n es acotada (digamos |bn | ≤ K
para todo n), entonces
M
M
X
X
≤K
a
b
|an |
n
n
N
N
y podemos utilizar el criterio de Cauchy.
Lema 11.20. Producto de P
series. Sean (an )n y (bn )n sucesiones tales
que
|b
|
≤
K
para
todo
n
y
an es absolutamente convergente entonces,
n
P
an bn es absolutamente convergente.
La demostración se deja como Ejercicio 11.4 para el lector.
Corolario 11.21.P
Sean (an )n y (bn )n sucesiones tales
P que |bn | ≤ K y an ≥ 0
para todo n. Si
an es convergente entonces
an bn es absolutamente
convergente.
Lema 11.22. Criterio de Dirichlet para series. Sea (an )n una sucesión
P
tal que | N
n=0 an | ≤ K para todo N ∈ N. Si
P(bn )n es una sucesión decreciente que satisface limn→∞ bn = 0 entonces
an bn es convergente.
La demostración se deja como Ejercicio 11.5 para el lector. Note que
simplemente es una adaptación de la prueba del criterio correspondiente
para integrales impropias. Véase también el Lema 12.8.
Si bien el criterio anterior es la adaptación del criterio de Dirichlet para
series, este resultado brinda una prueba muy sencilla para el criterio de series
alternantes:
Corolario 11.23. Criterio para series alternantes. Considere la serie
∞
X
(−1)n an .
n=0
A dicha series se le llama serie
P alternante. Si la sucesión an es decreciente
con limn→∞ an = 0 entonces (−1)n an es convergente.
150
11 Series numéricas
11.4 Criterios de la razón y de la raı́z
Prueba: Como
N
X
(−1)n ≤ 1
n=0
del criterio de Dirichlet se sigue que dicha serie es convergente.
Nota. Una de las ventajas que brindan las series alternantes que satisfacen
el criterio anterior es que podemos acotar fácilmente el error cometido al
aproximar la serie mediante la suma parcial. De hecho,
∞
∞
N
X
X
X
n n (−1)n an −
(−1) an = (−1) an n=0
n=0
n=N +1
= aN +1 − (aN +2 − aN +3 ) − (aN +4 − aN +5 ) − · · · ≤ aN +1 ,
pues cada aN +p − aN +p+1 ≥ 0 al ser (an )n decreciente.
♦
P
Ejemplo 11.24. La serie armónica alternante (−1)n /n es convergente y
X
N
∞ (−1)n X
(−1)n 1
−
.
≤
n
n
N +1
n=1
n=1
P
Lema 11.25. Criterio de Abel para series. Si Pan es convergente y si
(bn )n es monótona con limn→∞ bn = l ∈ R entonces
an bn es convergente.
La demostración se deja como Ejercicio 11.6 para el lector. Véase también
el Lema 12.8.
Ejemplo 11.26. Como limn→∞ arctan n = π/2 y arctan n es una sucesión
estrı́ctamente creciente tenemos que
X
X
an arctan n converge siempre que
an sea convergente.
Por ejemplo,
∞
X
2
e−n arctan n
n=0
son ambas convergentes.
y
∞
X
arctan n
n=1
np
(p > 1)
11.4. Criterios de la razón y de la raı́z. En esta sección estudiamos
dos criterios muy útiles para el estudio de la convergencia de una serie. La
importancia de estos dos criterios radica en el hecho que la convergencia ó
divergencia se concluye del estudio directo de los términos an sin necesidad
de compararlos con términos de otras series.
La idea básica una vez más es usar, en forma conveniente, el criterio de
comparación.
11 Series numéricas
11.4 Criterios de la razón y de la raı́z
151
Lema 11.27. Criterio de la raı́z. Si (an )n es una sucesión de términos
estrı́ctamente positivos tal que
√
√
lim n an = l ∈ R
ó
lim n an = ∞,
n→∞
n→∞
P
entonces la serie
an es convergente si l < 1 y es divergente si l > 1 ó si
l = ∞.
Prueba: La prueba para l = ∞ se deja como Ejercicio 11.7 para el lector.
Por la positividad de la sucesión y el valor de convergencia del lı́mite,
dado ε > 0 existe N ∈ N tal que
√
l − ε < n an < l + ε,
∀ n ≥ N.
P∞
La prueba consiste en acotar la serie
n=N an por series convergentes o
divergentes dependiendo del valor de l.
Si l > 1 tomamos ε > 0 de modo que l − ε > 1 y ası́
∞
∞
X
X
an ≥
(l − ε)n
n=N
n=N
P
por lo cual la serie
an es divergente por el criterio de comparación.
Para el caso l < 1 tomamos ε > 0 de modo tal que l + ε < 1 y ası́
∞
∞
X
X
an ≤
(l + ε)n
n=N
por lo cual la serie
P
n=N
an es convergente por el criterio de comparación.
Corolario 11.28. Si (an )n es una sucesión de términos que no se anulan
tal que
p
p
ó
lim n |an | = ∞,
lim n |an | = l ∈ R
n→∞
n→∞
P
entonces la serie
an es absolutamente convergente si l < 1 y es divergente
si l > 1 ó l = ∞.
Ejemplo 11.29. Los ejemplos
X1
X 1
y
n
n2
√
n
para los cuales el lı́mite lim an es 1 en ambos casos muestran que el criterio
no concluye si l = 1.
Ejemplo 11.30. La serie
X
es convergente dado que
s
lim
n→∞
n
1
(ln n)n
1
1
=
= 0 < 1.
(ln n)n
limn→∞ ln n
152
11 Series numéricas
11.4 Criterios de la razón y de la raı́z
Lema 11.31. Criterio de la razón. Si (an )n es una sucesión de términos
estrı́ctamente positivos tal que
an+1
an+1
=l∈R
ó
lim
= ∞,
lim
n→∞ an
n→∞ an
P
entonces la serie
an es convergente si l < 1 y es divergente si l > 1 ó
l = ∞.
Prueba: La prueba para l = ∞ se deja como Ejercicio 11.9 para el lector.
Por la positividad de la sucesión y el valor de convergencia del lı́mite,
dado ε > 0 existe N ∈ N tal que
(l − ε)an < an+1 < (l + ε)an ,
∀ n ≥ N.
P∞
Nuevamente acotamos la serie
n=N an por series convergentes o divergentes dependiendo del valor de l.
Si l > 1 tomamos ε > 0 de modo que l − ε > 1 y ası́
∞
X
an ≥ aN
n=N
∞
X
(l − ε)k
k=0
P
por lo cual la serie
an es divergente por el criterio de comparación.
Para el caso l < 1 tomamos ε > 0 tal que l + ε < 1. Ası́
∞
X
n=N
por lo cual la serie
P
an ≤ aN
∞
X
(l + ε)k
k=0
an es convergente por el criterio de comparación.
Corolario 11.32. Si (an )n es una sucesión de términos que no se anulan
tal que
|an+1 |
|an+1 |
lim
=l∈R
ó
lim
= ∞,
n→∞ |an |
n→∞ |an |
P
la serie
an es absolutamente convergente si l < 1 y es divergente si l > 1
ó l = ∞.
Hasta este punto, hemos adquirido un conocimiento bastante amplio sobre
series. Existen más criterios particulares para determinar la convergencia o
divergencia de series numéricas en aquellos casos en los cuales las herramientas que hasta ahora hemos desarrollado son insuficientes. Para un estudio
más extenso vea la lista de ejercicios. Mas interesante aún, es el estudio de
series de funciones.
Nota. La fórmula de Stirling (por James Stirling) relaciona, para números
naturales n suficientemente grandes, las cantidades n!, nn y en . Su presentación más común es:
n!en
lim √
= 1.
n→∞
2πnnn
11 Series numéricas
11.4 Criterios de la razón y de la raı́z
153
Una acotación algunas veces utilizada en aplicaciones es:
√
√
1
1
2πnnn e 12n+1 < n!en < 2πnnn e 12n .
Esta fórmula va a ser de mucha utilidad al estudiar la convergencia de algunas de las series en la lista de ejercicios.
♦
11.4.1. Ejercicios.
Ejercicio 11.1. Muestre que la serie geométrica
cualquier valor de a en ] − ∞, −1] ∪ [1, ∞[.
P∞
n
n=0 a
es divergente para
Ejercicio 11.2. Demuestre el Lema 11.11.
Ejercicio 11.3. Demuestre el Lema 11.13.
Ejercicio 11.4. Demuestre el Lema 11.20.
Ejercicio 11.5. Demuestre el Lema 11.22. Una posibilidad es intentar una
prueba directa, adelante no es difı́cil. Otra posibilidad es para x ∈ [n, n + 1[
definir las funciones f y g mediante f (x) := an y g(x) := bn .
Ejercicio 11.6. Demuestre el Lema 11.25. Sugerencia: Para x ∈ [n, n + 1[
defina las funciones f y g mediante f (x) := an y g(x) := bn . Verifique que
las funciones f y g verifican el criterio de Abel para integrales impropias.
Ejercicio 11.7. Muestre el criterio de la raı́z para el caso l = ∞.
Ejercicio 11.8. Escriba los detalles de la prueba del Corolario 11.28.
Ejercicio 11.9. Muestre el criterio de la razón para el casol = ∞.
Ejercicio 11.10. Escriba los detalles de la prueba del Corolario 11.32.
P
Ejercicio 11.11. Sea
an una serie convergente pero no absolutamente
convergente. Sea (pn )n la sucesión que se obtiene al eliminar de (an )n aquellos términos que son cero o negativos, y sea (qn )n la sucesión que se obtiene
al eliminar deP
(an )n aquellos
términos que son cero o positivos. Muestre que
P
ambas series
pn y
qn son divergentes.
P
Ejercicio 11.12. Sea
an una serie. Sean
y (qn )n como en el ejerP (pn )nP
cicio anterior. Muestre
que
ambas
series
p
y
qn son convergentes si
n
P
y solo si la serie
an es absolutamente convergente.
Ejercicio 11.13. Muestre la Proposición 11.18 para s ≤ 0.
Ejercicio 11.14. Complete los detalles de P
la Proposición 11.19 para demostrar la convergencia absoluta de la serie
bn .
Ejercicio 11.15. Muestre que una serie de términos positivos es convergente si y solo la sucesión de sumas parciales es acotada.
Ejercicio 11.16. Muestre en forma directa (sin usar el criterio de Dirichlet) que si la sucesión (an )n es decreciente y limn an = 0 entonces la serie
P
(−1)n an es convergente.
154
11 Series numéricas
11.4 Criterios de la razón y de la raı́z
Ejercicio 11.17. Una sucesión es convergente en el sentido de Česaro si
s1 + · · · + sn
∈R
n
donde las sn = aP
1 + · · · + an son las sumas parciales de la sucesión (an )n .
Muestre que si
an es convergente entonces (an )n es convergente en el
sentido de Česaro y que ambos lı́mites coinciden. Encuentre una sucesión
que sea convergente en el sentido de Česaro pero la serie que se forma no
sea convergente.
Sugerencia: muestre que si (xn )n es convergente a x entonces la sucesión
de medias aritméticas es convergente a x.
P
Ejercicio
11.18. Muestre que si
an converge absolutamente entonces
P
bn converge absolutamente para cualquier subsucesión (bn )n de (an )n .
Verifique que el resultado es falso si la convergencia no es absoluta.
lim
n→∞
Ejercicio 11.19. Otra versión del criterio de la raı́z.
a. Si (an )n es una sucesión tal que existe 0 < r < 1 y N ∈ N de modo
que
|an | ≤ rn ,
∀n ≥ N
P
entonces
an es absolutamente convergente.
b. Si (an )n es una sucesión tal que existe N ∈ N de modo que
|an | ≥ 1,
entonces
P
∀n ≥ N
an es divergente.
Ejercicio 11.20. Otra versión del criterio de la razón.
a. Si (an )n es una sucesión tal que existe 0 < r < 1 y N ∈ N de modo
que
|an+1 |
≤ r,
∀n ≥ N
|an |
P
entonces
an es absolutamente convergente.
b. Si (an )n es una sucesión tal que existe N ∈ N de modo que
|an+1 |
≥ 1,
|an |
entonces
P
∀n ≥ N
an es divergente.
Ejercicio 11.21. Criterio de Raabe.
a. Si (an )n es una sucesión con cada an 6= 0 tal que existe r > 1 y
N ∈ N de modo que
|an+1 |
r
≤1− ,
|an |
n
entonces
P
∀n ≥ N
an es absolutamente convergente.
11 Series numéricas
11.4 Criterios de la razón y de la raı́z
155
b. Si (an )n es una sucesión con cada an 6= 0 tal que existe r ≤ 1 y
N ∈ N de modo que
|an+1 |
r
≥1− ,
|an |
n
∀n ≥ N
P
entonces
an no es absolutamente
P convergente. Más aún, si los an
son positivos entonces la serie
an es divergente.
Ejercicio 11.22. Corolario al criterio de Raabe. Si (an )n es una sucesión con cada an 6= 0 y si
|an+1 |
=l∈R
lim n 1 −
n→∞
|an |
P
entonces
an es absolutamente convergente si l > 1 y no es absolutamente
P
convergente si l < 1. Más aún, si los an son positivos entonces la serie
an
es divergente si l < 1.
Ejercicio 11.23. Criterio de condensación de Cauchy.
Sea (an )n una
P
sucesión decreciente
de
términos
positivos.
Muestre
que
a
es
convergente
n
P n
si y solo si
2 a2n es convergente.
P
P
EjercicioP11.24. Muestre que si (an )2 y (bn )2 son ambas convergentes
entonces
an bn también es convergente.
P
P
Ejercicio 11.25. Muestre que si (an )2 es convergente entonces
an /n
también es convergente.
Ejercicio 11.26.
P Sea (an )n una sucesión decreciente de términos positivos.
Muestre que si
an es convergente entonces lim nan = 0.
Ejercicio 11.27. Convergencia
del
P
P∞producto de Cauchy de series.
Muestre que si las series ∞
a
y
n=0 n
n=0 bn son convergentes a los valores
A y B respectivamente entonces, su producto de Cauchy definido mediante
∞
X
an
n=0
∞
X
bn :=
n=0
∞ X
n
X
ak bn−k =
n=0 k=0
∞
X
(a0 bn + a1 bn−1 + · · · + an−1 b1 + an b0 ),
n=0
es convergente al valor AB.
P
Ejercicio 11.28. Analice la convergencia de la serie
cos(nx)/n.
P
Ejercicio 11.29. Suponga que
an es absolutamente convergente. ¿Qué
se puede decir sobre las series siguientes?
Xp
X a2
X
Xp
n
|an |, 3.
|an an+1 |,
4.
1.
a2n ,
2.
,
1 + a2n
5.
X
an
,
1 + an
6.
X
p
|an |
,
n
7.
X a0 + a1 + · · · + an
n
.
156
11 Series numéricas
11.4 Criterios de la razón y de la raı́z
Ejercicio 11.30. ¿Cuál suma parcial aproxima las siguientes series con 10
dı́gitos de exactitud?
∞
∞
∞
X
X
X
(−1)n
(−1)n
(−1)n
1.
.
,
2.
,
3.
n
n!
2n
n=1
n=1
n=1
Ejercicio 11.31. Calcule el valor de las siguientes series:
∞
∞
X
X
1
1
1.
,
2.
ln 1 − 2 ,
n2 − 1
n
n=2
3.
n=2
∞
X
arctan
n=1
5.
∞
X
∞
X
23n + 3n−1
42n
n=0
9.
∞
X
∞
X
n=1
13.
,
4.
∞
X
n=1
∞
X
arctan
n=1
6.
∞
X
,
8.
∞
X
n+1
3n
n=1
n=1
10n
,
(5n+1 − 2n+1 )(5n − 2n )
1
,
(a + n)(a + n + 1)
∞
X
10.
∞
X
12.
2
n2
,
n
,
(n + 1)(n + 2)(n + 3)
n=1
2n−1
,
(1 + 2n )(1 + 2n−1 )
n=1
11.
1
,
n(n + 1)(n + 2)
n=1
7.
1
2
n +n+1
,
n
,
(n + 1)!
ln
n=0
n2 + 3n + 2
n2 + 3n
,
(a ≥ 0).
Ejercicio 11.32. Para
P aann ∈ {0, 1, 2, 3, 4, 5, 6, 7, 8, 9} halle el valor de convergencia de la serie
10n .
Ejercicio 11.33. Analice la convergencia de las siguientes series:
X sen nx
X (−1)n
X
1
1.
,
2.
,
3.
sen ,
2
n
2n + 1
n
4.
7.
X n!
,
en2
X
√
3
1
5.
∞
X
n=2
,
n2 − 1
X n!
10.
,
en
8.
11.
X
∞
X
n=2
1
,
(ln n)ln n
(−1)n
1
,
(ln n)n
6.
ln n
,
n
12.
9.
X n2
n!
X ln n
∞
X
(−1)n
,
(ln n)n
n=2
,
n
,
11 Series numéricas
11.4 Criterios de la razón y de la raı́z
157
X en
,
nn
13.
X
1
,
(ln n)ln ln n
16.
X
X 1
X 1
1
,
17.
,
18.
,
n+1
ln
n
n
nn+1
(ln ln n)
X
1
19.
.
n(ln n)(ln ln n)(ln ln ln n)
14.
X n!
,
nn
15.
Ejercicio 11.34. ¿Para qué valores del parámetro p son convergentes las
siguientes series?
√
∞
∞
X
X n + 1 − √n
X
1
pn n!
1.
,
2.
,
3.
,
n(ln n)p
np
nn
n=2
4.
X
n=1
1
,
(ln n)p
5.
X 1
7.
ln 1 − p , p > 0,
n
√
3
9.
X
n3 + 1 −
np
√
n2 + 1
.
8.
X
X
√
3
n+1−
np
√
3
n
,
1
,
n(ln n)(ln ln n)p
6.
∞
X
n=2
1
,
np ln n
158
12. Series de funciones
En la primera parte de esta sección preparamos el camino para un tópico
de la teorı́a de series de suma importancia, las series de potencias. Las series
de potencias son un caso particular, aunque de mayor trascendencia, de las
series de funciones. El lector notará la gran similitud existente entre esta
sección y la sección sobre series numéricas.
12.1. Series de funciones. Si (fn )n es una sucesión de funciones fn : A ⊂
R → R, la sucesión de sumas parciales
sn : A → R,
sn (x) :=
n
X
fk (x)
k=0
es a su vez, una sucesión de funciones con dominio común A ⊂ R. Como
vimos en el capı́tulo sobre sucesiones de funciones, es posible que la sucesión
de funciones (sn )n tenga como lı́mite una función s cuyo dominio A0 sea más
chico que el dominio común A.
Definición 12.1. Sea (fn )n una sucesión de funciones fn : A ⊂ R → R. Si
la sucesión de sumas parciales
s0 (x) := f0 (x),
s1 (x) := s0 (x) + f1 (x) = f0 (x) + f1 (x),
...
sn (x) := sn−1 (x) = f0 (x) + · · · + fn (x),
...
converge a una función s : A0 ⊂ A → R, decimos que la serie
convergente en A0 y que
∞
X
n=0
fn (x) := lim sn (x) = lim
n→∞
n→∞
n
X
fk (x),
P∞
n=0 fn (x)
es
∀ x ∈ A0 .
k=0
Definición 12.2. Si (fn )n es una sucesión de funciones fn : A ⊂ R → R
decimos que
P
P
a. P fn converge absolutamente (en A0 ) si
|fn | converge (en A0 );
0
b.
fn converge uniformemente (en A ) si (sn ) (la sucesión de
sumas parciales) converge uniformemente (en A0 ).
Que la convergencia absoluta de la serie implica la convergencia (condicional) de la serie es una consecuencia sencilla del criterio de Cauchy para
sucesiones y de la desigualdad triangular, cuya demostración se deja como
Ejercicio 12.2 para el lector. Para futuras referencias, enunciamos el Criterio de Cauchy para convergencia uniforme de series de funciones.
12 Series de funciones
12.1 Series de funciones
159
Lema 12.3. Sea (f
Pn )n una sucesión de funciones fn : A ⊂ R → R. La
serie de funciones
fn converge uniformemente en A si y solo si para todo
ε > 0 existe N ∈ N tal que
|fn (x) + fn+1 (x) + · · · + fm (x)| ≤ ε,
∀ m ≥ n ≥ N,
∀ x ∈ A.
Quizá las consecuencias más importantes de la definición de convergencia
de series a partir de la convergencia de la sucesión de sumas parciales, son
los resultados siguientes que permiten, fácilmente, deducir la continuidad,
integrabilidad, o diferenciabilidad de la función lı́mite. Las demostraciones
se dejan como Ejercicio 12.3 para el lector.
Teorema 12.4.
P Si (fn )n es una sucesión de funciones continuas fn : A ⊂
R → R tal que
fn converge uniformemente en A a una función s : A → R
entonces la función s es continua.
Teorema 12.5. Si (fn )n es una
P sucesión de funciones Riemann integrables
fn : [a, b] ⊂ R → R tal que
fn converge uniformemente en [a, b] a una
función s entonces la función s : A → R es Riemann integrable en [a, b] y
se tiene que
Z b
Z bX
∞
∞ Z b
X
s(x) dx =
fn (x) dx =
fn (x) dx.
a
a n=0
n=0 a
Teorema 12.6. Sea (fn )n una sucesión de funciones fn : P
A ⊂ R → R
tal que cada fn posee una derivada fn0 en A. Suponga que
fn0 converge
uniformemente en A a unaPfunción r : A → R y que para algún
P punto
x0 ∈ A la serie numérica
fn (x0 ) es convergente. La serie
fn (x) es
uniformemente convergente en A a una función derivable s : A → R y se
tiene que
!0
∞
∞
X
X
0
0
fn (x) = r(x) = s (x) =
fn (x) .
n=0
n=0
El más conocido de los criterios de convergencia uniforme de series de
funciones es quizá el siguiente resultado, cuya demostración es un sencillo
Ejercicio 12.5 utilizando criterios de Cauchy.
Lema 12.7. Criterio M de Weierstrass. Sea (fn )n una sucesión de
+
funciones fn : A ⊂ R → R. Si para cada
P n ∈ N existe Mn ∈ R tal que
|fn (x)|P≤ Mn para todo x ∈ A y la serie
Mn es convergente entonces, la
serie
fn es uniformemente convergente en A.
Para terminar esta subsección, veremos un par de resultados que equivalen a los Lemas 10.18 y 10.20, para series de productos de funciones. Véase
también los Lemas 11.22 y 11.25. La idea básica, una vez más, es la siguiente.
Si (gn )n es acotada (digamos ||gn ||A ≤ K para todo n), entonces
n
n
X
X
fj (x)gj (x) ≤ K
|f (x)|
j=m+1
j=m+1
160
12 Series de funciones
12.1 Series de funciones
y podemos utilizar el Lema 12.3.
Lema 12.8. Criterio de Dirichlet para series de funciones. Sea fn :
A → R una sucesión de funciones tales que la sucesión de sumas parciales
es uniformemente acotada, i.e. existe K ∈ N tal que
n
X
X n
f
=
sup
f
(x)
:
x
∈
A
≤ K, ∀n ∈ N.
j j
j=1
A
j=1
Si gn : A → R es una sucesión decreciente
de funciones que converge uniP
formemente a cero en A entonces,
fn gn es uniformemente convergente
en A.
Prueba:
Suprimimos por un momento la evaluación en x, y denotemos sn =
Pn
j=1 fj para obtener para m ≥ n
m
X
fj gj =
j=n
m
m
m
m−1
X
X
X
X
(sj − sj−1 )gj =
gj sj − gj sj−1 =
gj sj −
gj+1 sj
j=n
= gm sm − gn sn−1 +
j=n
j=n
j=n−1
m−1
X
(gj − gj+1 )sj .
j=n
Gracias a la desigualdad triangular concluimos que
m
m−1
X
X
f
(x)g
(x)
≤
K
g
(x)
+
g
(x)
+
g
(x)
−
g
(x)
= 2Kgn (x),
j
j
m
n
j
j+1
j=n
j=n
para todo x ∈ A. Por el criterio de Cauchy para la convergencia uniforme
de series de funciones y las hipótesis para la sucesión (gn )n concluimos el
resultado.
P
Lema 12.9. Criterio de Abel para series de funciones. Sea
fn
una serie de funciones fn : A → R que convergente uniformemente en A.
Si gn : A → R es una sucesión
P monótona de funciones tal que ||gn ||A ≤ K
para algún K ∈ N entonces,
fn gn es uniformemente convergente en A.
P
Prueba: Denotemos con S(x) = n fn (x). Usando la misma identidad que
usamos en la demostración anterior, esta vez con n = 1 obtenemos que
m
X
j=1
fj gj = f1 (g1 − g2 ) + gm sm +
m−1
X
(gj − gj+1 )sj
j=2
= f1 (g1 − g2 ) − gm (S − sm ) + g2 S + S(gm − g2 ) +
m−1
X
(gj − gj+1 )sj
j=2
= f1 (g1 − g2 ) − gm (S − sm ) + g2 S +
m−1
X
(gj − gj+1 )(sj − S).
j=2
12 Series de funciones
12.2 Series de potencias
161
Como la sucesión de sumas parciales sm converge uniformemente a S, y
|gm (x)(S(x)−sm (x))| ≤ K|S(x)−sm (x)|, sabemos que gm (S −sm ) converge
uniformemente a 0.
P
Para concluir la demostración, veamos que la serie (gj − gj+1 )(sj − S)
es uniformemente de Cauchy. Sin perdida de generalidad, tomemos (gn )n
decreciente para tener gn − gm+1 ≥ 0 siempre que m ≥ n. Para ε > 0 existe
N ∈ N tal que para todo n ≥ N y todo x ∈ A se tiene −ε < S(x)−sn (x) < ε.
Como para m ≥ n ≥ N ,
inf{sj (x) − S(x) : j = n, . . . , m, x ∈ A}(gn (x) − gm+1 (x))
≤
m
X
(gj (x) − gj+1 (x))(sj (x) − S(x))
j=n
≤ sup{sj (x) − S(x) : j = n, . . . , m, x ∈ A}(gn (x) − gm+1 (x)),
donde tanto el ı́nfimo como el supremo en dicha desigualdad pertenecen al
intervalo ] − ε, ε[, concluimos que
m
X
(gj (x) − gj+1 (x))(sj (x) − S(x)) ≤ ε(gn (x) − gm+1 (x)).
j=n
Como la sucesión a la derecha es uniformemente acotada, concluimos el
resultado.
Los resultados anteriores son particularmente útiles para series de potencias, las
estudiamos a continuación. Si consideramos una serie de la
Pcuales
n
forma an x , podemos tomar fn (x) = xn y gn = an una función constante.
De este modo
P nsi (an )n decrece a cero, se concluye la convergencia de la serie
dado que
x es una serie geométrica que converge para |x| < 1.
12.2. Series de potencias. Una forma de estudiar las series de potencias
es considerarlas como lı́mites de sucesiones de polinomios de la forma
p0 (x) = a0 ,
p1 (x) = a0 + a1 x,
p2 (x) = a0 + a1 x + a2 x2 ,
...
pn (x) = a0 + a1 x + a2 x2 + · · · + an xn ,
··· .
P
Esto es, cada polinomio pn es la suma parcial de la serie de funciones an xn
donde, por abuso de la notación, aceptamos para el caso x = 0 que x0 = 1.
Observe como cada pn define una función con dominio R mediante
pn : R → R,
x 7→ pn (x).
162
12 Series de funciones
12.2 Series de potencias
Sin embargo, y como sabemos de la sección anterior, la sucesión de funciones
(pn (x))n puede converger tan solo en un dominio menor. Por el corolario
del criterio de la raı́z, como
p
p
lim n |an xn | = |x| lim n |an | =: |x|l,
n→∞
n→∞
P
tenemos que la serie de funciones
an xn converge absolutamente siempre
que |x|l < 1 y diverge siempre que |x|l > 1.
P
De este modo, si l ∈ R+ tenemos que la serie de funciones
an xn converge absolutamente siempre que x ∈] − 1/l, 1/l[ y diverge siempre que se
tenga x ∈] − ∞, −1/l[∪]1/l, ∞[.
Nota. Evidentemente, la cantidad
1
limn→∞
1
p
= ,
n
l
|an |
juega un papel central en el estudio de la serie de funciones
P
an xn .
2
♦
Nota. La motivación anterior presupuso que el dominio de convergencia de
la sucesión (pn (x))n tenı́a como “centro” a 0, en general, se pueden estudiar
sucesiones de la forma
pn (x) = a0 + a1 (x − c) + a2 (x − c)2 + · · · + an (x − c)n
para cualquier c ∈ R. El cambio de variables y = x − c nos envı́a de regreso
al caso c = 0.
♦
Definición P
12.10. Sea (an )n una serie númerica. Se define la serie de
potencias
an (x − c)n alrededor de c como la serie de funciones cuyas
sumas parciales están dadas por
pn (x) = a0 + a1 (x − c) + a2 (x − c)2 + · · · + an (x − c)n .
p
p
Si lim n |an | = l ∈P
R+ ∪ {0} ó si lim n |an | = ∞, se define como radio de
convergencia de
an xn a la cantidad R dada por
1
R :=
si l ∈ R+ ;
R := ∞ si l = 0;
R := 0 si l = ∞.
l
P
Se define como intervalo de convergencia de
an (x − c)n al intervalo
abierto ]c − R, c + R[, o ] − ∞, ∞[ según corresponda.
Nota. Más adelante vamos a estudiar series de potencias que convergen en
intervalos de la forma [c − R, c + R[, ó ]c − R, c + R] ó incluso [c − R, c + R].
En tales casos es usual llamar a dichos intervalos, intervalos de convergencia.
En estas notas usaremos con frecuencia el nombre más general “dominio de
convergencia”.
♦
De la motivación al inicio de esta sección se tiene que
2En general se estudia el lim sup
p
n
|an |.
12 Series de funciones
12.2 Series de potencias
163
Proposición
12.11. Si R es el radio de convergencia de la serie de poP
tencias
an (x − c)n entonces, dicha serie es absolutamente convergente si
|x − c| < R y es divergente si |x − c| > R.
En el Ejercicio 12.20 se verá porque el criterio no concluye cuando |x−c| =
R. En general, en el resto de las notas enunciaremos los resultados para
series de potencias centradas en 0. Que los resultados siguen siendo válidos
para series de potencias alrededor de c se sigue simplemente del cambio de
variable x 7→ x − c.
Una de las ventajas de las series de potencias es, la convergencia uniforme
dentro de cualquier intervalo cerrado contenido en el intervalo de convergencia.
Lema 12.12. Si [a, b] ⊂ ] − R, R[ es cualquier intervalo P
cerrado contenido
en el intervalo de convergencia de la serie de potencias
an xn entonces,
dicha serie es uniformemente convergente en [a, b].
Para la demostración de este resultado se observa que existe 0 < r < 1
para el cual |x| < rR para todo x ∈ [a, b]. Para n suficientemente grande se
puede mostrar que |an xn | ≤ rn para todo x ∈ [a, b]. Por último se utiliza
el criterio M de Weierstrass con Mn = rn . Los detalles se dejan como
Ejercicio 12.21 para el lector.
Dado que los polinomios son funciones continuas y que el lı́mite uniforme
de funciones continuas es continua, como una consecuencia del resultado
anterior se tienen los siguientes resultados cuyas demostraciones se dejan
como Ejercicio 12.22 para el lector.
Lema 12.13. Si [a, b] ⊂ ] − R, R[ es cualquier intervaloPcerrado contenido
en el intervalo de convergencia de la serie de potencias
an xn entonces la
P
n
función s : [a, b] → R definida mediante s(x) = an x es:
i. continua en [a, b];
ii. integrable en [a, b] y además
Z b
Z bX
Z b
∞
∞
∞
X
X
bn+1 − an+1
n
n
;
s(x) dx =
an x dx =
an
x dx =
an
n+1
a
a
a
n=0
n=0
n=0
iii. derivable en [a, b] y además
!0
∞
∞
∞
X
X
X
0
n
n 0
s (x) =
an x
=
an (x ) =
an nxn−1 .
n=0
n=0
n=1
Al aplicar repetidas veces la tercera parte del resultado anterior se concluye que:
Corolario 12.14. Si [a, b] ⊂ ] − R, R[ es cualquier intervalo cerrado
P contenido en el intervalo de convergencia de la serie de potencias
an xn
entonces, para todo k ∈ N la función s : [a, b] → R definida mediante
164
12 Series de funciones
s(x) =
P
(k)
s
12.3 Series de Taylor
an xn es k-veces derivable en [a, b] y además
(x) =
∞
X
an n(n − 1) · · · (n − k + 1)x
n=k
n−k
=
∞
X
n=k
an
n!
xn−k .
(n − k)!
Más aún, al evaluar en x = 0 se obtiene que
s(k) (0)
.
k!
De esta última identidad se concluye que
ak =
CorolarioP12.15. De
P la nunicidad de los coeficientes. Si las series de
potencias
an xn y
bn x convergen a la misma función s(x) en el mismo
intervalo ] − R, R[ para algún R > 0 entonces an = bn para todo n ∈ N.
12.3. Series de
P Taylor. nDe los corolarios anteriores se sigue que si la serie
de potencias
an (x − c) converge a la función s(x) en el intervalo ]c −
R, c + R[ para algún R > 0 entonces, an n! = s(n) (c) para todo n ∈ N y ası́,
de los términos de la serie, se recuperan los valores de las derivadas de la
función s en el punto c.
Es natural preguntarse entonces, si s : x]c − R, c + R[→ R es una función
derivable en todos los órdenes en el punto x = c, es posible posible construir
una serie de potencias cuyos coeficientes sean las derivadas de la función s
en el punto x = c :
∞ (n)
X
s (c)
(x − c)n .
(9)
n!
n=0
¿Es esta serie de potencias convergente en ]c − R, c + R[ a la función s?
La respuesta a dicha pregunta es “no necesariamente”. Véase el Ejercicio 12.27.
Definición 12.16. Si la serie de potencias (9) converge a la función s en el
intervalo ]c − R, c + R[ entonces decimos que dicha serie de potencias es la
expansión de Taylor de s en c.
Observe como las sumas parciales de (9) son precisamente los polinomios
de Taylor de grado n de la función s alrededor de c.
Un resultado fundamental en cualquier curso de calculo diferencial es el
Teorema de Taylor.
Teorema 12.17. Sea n ∈ N y sea s : [a, b] → R una función tal que s y sus
derivadas s0 , s00 , . . . , s(n) son continuas en [a, b]. Si s(n+1) existe en ]a, b[ y
c ∈ [a, b] entonces para todo x ∈ [a, b] existe un punto z entre c y x tal que
!
(n) (c)
s
s(n+1) (z)
s(x) − s(c) + s0 (c)(x − c) + · · · +
(x − c)n =
(x − c)n+1 .
n!
(n + 1)!
12 Series de funciones
12.3 Series de Taylor
165
En la identidad anterior, la expresión entre paréntesis a la izquierda (el
n-ésimo polinomio de Taylor de la función s alrededor de c), es precisamente
la suma parcial de la serie de potencias (9).
En forma similar, en el Teorema 4.37 vimos como con las mismas hipótesis
que en el teorema anterior:
!
s(n) (c)
0
n
s(x) − s(c) + s (c)(x − c) + · · · +
(x − c)
n!
Z
±1 x
(x − t)n s(n+1) (t) dt.
=
n! c
De este modo, si la función s y todas sus derivadas son continuas en
]c − R, c + R[, se tiene para todo n ∈ N que
n
sup{|s(n+1) (z)| : |c − z| < R}
X
s(k) (c)
k
(x − c) ≤
Rn+1 .
s(x) −
k!
(n + 1)!
k=0
Por lo tanto, si la función s satisface hipótesis que permitan deducir que el
lado derecho de la desigualdad anterior tiende a cero conforme n tiende a
infinito entonces, podemos concluir que la serie de potencias (9) converge en
]c − R, c + R[ a la función s. Por ejemplo:
Lema 12.18. Sea s :]c − R, c + R[→ R una función tal que s y todas sus
derivadas son continuas en ]c − R, c + R[. Si existe B ∈ R tal que |s(n) (z)| ≤
B para todo z ∈]c − R, c + R[ y todo n entonces la serie de potencias (9)
converge (uniformemente) en ]c − R, c + R[ a la función s.
Ejemplo 12.19. Considere la función s(x) = sen x. En este caso |s(n) (z)| ≤
1 para todo z ∈ R y todo n ∈ N. Además, s(2n) (0) = 0 y s(2n+1) (0) = (−1)n
por lo cual (9) tiene la forma
∞
X
(−1)n 2n+1
x
.
(10)
(2n + 1)!
n=0
Como para todo r ∈ R,
rn+1
= 0,
n→∞ (n + 1)!
por el lema anterior concluimos que (10) converge (uniformemente) a la
función sen x en todo intervalo de la forma [−r, r].
Note que el radio de convergencia de la serie de potencias (10) está dado
por (véase el Ejercicio 12.1)
p
lim n (2n + 1)! = ∞.
lim
n→∞
Ejemplo 12.20. Usando el Lemma 12.13 iii se concluye que la serie de
potencias
∞
X
(−1)n 2n
x .
(2n)!
n=0
166
12 Series de funciones
12.3 Series de Taylor
converge (uniformemente) a la función cos x en todo intervalo de la forma
[−r, r].
Ejemplo 12.21. Considere la función s(x) = ex . En este caso |s(n) (z)| ≤ eR
para todo z ∈] − R, R[ y todo n ∈ N. Además, sn (0) = 1 por lo cual (9)
tiene la forma
∞
X
1 n
x .
(11)
n!
n=0
Como para todo r ∈ R,
er rn+1
= 0,
n→∞ (n + 1)!
concluimos que (11) converge (uniformemente) a la función ex en todo intervalo de la forma [−r, r].
Note que el radio de convergencia de la serie de potencias (11) está dado
por (véase el Ejercicio 12.1)
√
n
lim n! = ∞.
lim
n→∞
Ejemplo 12.22. Consideremos la función f (x) = ln x esta vez alrededor de
c = 1. Es fácil verificar que f (n) (x) = (−1)n−1 (n − 1)!/xn y ası́ f (n) (1) =
(−1)n−1 (n − 1)! por lo cual (9) tiene la forma
∞
X
(−1)n−1
n=1
n
(x − 1)n .
(12)
Como
r
|(−1)n−1 (x − 1)n |
= |x − 1|,
n→∞
n
dicha serie converge para x ∈]0, 2[ absolutamente.
Surgen las preguntas, ¿representa (12) a ln x cuando x ∈]0, 2[? Más aún,
note que cuando x = 2 la serie (12) es convergente. ¿Se tiene en este caso
lim
n
ln 2 =
∞
X
(−1)n−1
n=1
n
?
Observamos que
n
n+1
X
(−1)n n! (x − 1)n+1 (−1)k−1
k
ln x −
= |x − 1|
(x
−
1)
=
z n+1
k
(n + 1)! (n + 1)z n+1
k=1
para algún z entre x y 1.
Si 1 < z < x < 2 entonces x − z ≤ 1 y
(x − 1)n+1
1
≤
→ 0,
n+1
(n + 1)z
n+1
por lo cual (12) converge a ln x para todo x en [1, 2[.
12 Series de funciones
12.3 Series de Taylor
167
Si 0 < x < z < 1 (no es necesariamente cierto que 1 ≤ x + z), tome a > 0
de modo que x ∈ [a, 1]. Entonces
(1 − x)n+1
(1 − a)n+1
≤
→ 0,
(n + 1)z n+1
an+1 (n + 1)
1
≤ a.
2
siempre que
Por lo cual (12) converge a ln x para todo x en [1/2, 2[.
Si a > 1/2, no podemos concluir de la acotación anterior si (12) converge
a ln x para x en ]0, 1/2[.
Por último, si tomamos x = 2 la respuesta a la segunda pregunta es si,
gracias al siguiente resultado conocido como Teorema de Abel.
P
n
Teorema 12.23. Si la serie de potencias s(x) = P ∞
n=0 an (x − c) posee
∞
n
radio de convergencia R > 0 y si la serie numérica n=0 an R converge al
valor s(c + R) entonces
lim
x→(c+R)−
s(x) =
∞
X
lim
x→(c+R)−
an (x − c)n = s(c + R) =
n=0
∞
X
an Rn .
n=0
Es decir, la función s es continua en x = c + R (a la izquierda). El resultado
análogo vale para x = c − R (a la derecha).
Prueba: Vamos a demostrar el resultado para c = 0 y R = 1. El caso general
c > 0 y la demostración para x = c − R se dejan como Ejercicio 12.24 para
el lector.
Pn
P
P
k
Denotemos sn (x) := nk=0 ak xk y tn := nk=0 ak =
k=0 ak R . Para
0 < x < 1,
sn (x) =
n
X
ak xk = t0 +
k=0
= t0 +
= t0 +
n
X
k=1
n
X
n
X
(tk − tk−1 )xk
k=1
n
X
tk xk − x
tk xk − x
k=1
k=1
n−1
X
tk−1 xk−1
tk xk
k=0
= t0 + tn xn +
n−1
X
tk (1 − x)xk − xt0
k=1
= tn xn +
n−1
X
tk (1 − x)xk .
k=0
Como tn → s(1) y
xn
s(x) =
→ 0 cuando n → ∞, concluimos que
∞
X
n=0
tn (1 − x)xn ,
para todo x ∈]0, 1[.
168
12 Series de funciones
Dado que (1 − x)
P∞
n=0 x
n
12.3 Series de Taylor
= 1, observamos que
s(1) =
∞
X
s(1)(1 − x)xn ,
n=0
y entonces
s(1) − s(x) =
∞
X
s(1) − tn (1 − x)xn .
n=0
Sea ε > 0 y tomemos N suficientemente grande para que |s(1) − tn | < ε/2
si n ≥ N . Ası́
N
∞
X
X
s(1) − s(x) ≤
s(1) − tn (1 − x)xn +
s(1) − tn (1 − x)xn
n=0
≤
n=N +1
∞
N
X
X
s(1) − tn (1 − x)xn + ε (1 − x)
xn
2
n=0
n=N +1
N
X
s(1) − tn (1 − x)xn + ε , para todo x ∈]0, 1[.
2
n=0
P
n
Ahora observamos que la función fN (x) := N
n=0 s(1) − tn (1 − x)x es
continua y positiva en [0, 1] y que fN (1) = 0, por lo cual existe δ > 0 tal
que 0 ≤ fN (x) < ε/2 siempre que 1 − δ < x < 1. Por lo tanto
s(1) − s(x) < fN (x) + ε < ε, siempre que 1 − δ < x < 1,
2
lo cual completa el resultado.
<
Por último, un recı́proco parcial del teorema anterior es el siguiente.
Teorema
12.24. Teorema de Tauber. Suponga que la serie de potencias
P
an xn converge a s(x) para
P |x| < 1 y que limn→∞ nan = 0. Entonces si
limx→1− s(x) = A, la serie
an converge a A.
Prueba: Para x fijo con 0 < x < 1 tenemos que
X
X
N
N
an − A ≤ an − s(x) + s(x) − A
n=0
n=0
X
X
N
∞
n
n an x + s(x) − A
≤
an (1 − x ) + n=0
≤
N
X
n=N +1
∞
X
n
|an |(1 − x ) +
n=0
≤ (1 − x)
|an |xn + s(x) − A
n=N +1
N
X
n=0
n|an | +
∞
X
n=N +1
|an |xn + s(x) − A,
12 Series de funciones
12.3 Series de Taylor
169
donde usamos el hecho 1 − xn = (1 − x)(1 + x + · · · +n−1 ) ≤ n(1 − x).
Como limn→∞ n|an | = 0, pues el valor absoluto es una función continua,
del Ejercico 2.18 concluimos que
m
1 X
n|an | = 0.
m→∞ m + 1
lim
n=0
Sea ε > 0. Dado que limx→1− s(x) = A, existe δ > 0 para el cual
|s(x) − A| < ε, siempre que 0 < 1 − x < δ. Tomemos N ∈ N tal que
(1) |an | < N ε+1 para todo n ≥ N ;
PN
(2)
n=0 n|an | < (N + 1)ε;
(3) 0 < N 1+1 < δ y fijemos xN = 1 − N 1+1 .
Ası́, usando xn en la deducción anterior,
N
N
∞
X
X
X
n
s(xN ) − A
a
−
A
≤
(1
−
x
)
n|a
|
+
|a
|x
+
n
n
n
N
N
n=0
n=0
n=N +1
< (1 − xN )(N + 1)ε +
∞
X
ε
xnN + ε
N +1
n=N +1
= 2ε +
+1
xN
N
ε
< 3ε,
N + 1 1 − xN
lo cual completa el resultado.
12.3.1. Ejercicios.
Ejercicio 12.1. Muestre que
1
(ln 2 + ln 3 + · · · + ln n) →n→∞ ∞.
n
Concluya que
lim
√
n
n→∞
Sugerencia: compare con
Rn
1
n! = ∞.
ln x dx.
Ejercicio 12.2. Verifique que la convergencia absoluta de series de funciones implica la convergencia de la serie.
Ejercicio 12.3. Demuestre el criterio de Cauchy para series de funciones.
Ejercicio 12.4. Demuestre los Teoremas 12.4, 12.5 y 12.6.
Ejercicio 12.5. Demuestre el Lema 12.7.
Ejercicio 12.6. Dé los detalles de la demostración de la Proposición 12.11.
Note que usando el Lema 12.7, se puede dar una demostración muy sencilla.
170
12 Series de funciones
12.3 Series de Taylor
Ejercicio 12.7.
P Analice la convergencia (absoluta, uniforme) de las series
de funciones
fn donde cada fn (x) viene dado por:
n
1
2. n21x2 ,
3. sen nx2 ,
4. xn ,
1. x2 +n2 ,
n
n
1
5. x+n
,
7. (−1)
n+x ,
x
6. 1+x
n,
x
8. n3 +nx
2.
P
Ejercicio 12.8. Muestre que siP an es absolutamente
convergente enP
tonces, las series de funciones
an sen(nx) y
an cos(nx) son absoluta
y uniformemente convergentes.
Ejercicio 12.9. Muestre que la serie de funciones
X sen nx
n
converge uniformemente en
P cualquier intervalo cerrado [a, b] ⊂ ]0, 2π[.
Sugerencia: 2 sen(x/2) nk=1 sen kx = cos(x/2) − cos((2n + 1)x/2).
Ejercicio 12.10. Muestre
P que si (an )n es una sucesión decreciente de términos positivos tal que
an sen(nx) converge uniformemente, entonces se
tiene que limn→∞ nan = 0.
Ejercicio 12.11. Sea fn P
: [a, b] → R una sucesión de funciones positivas e
integrables tal que la serie fn (x) converge en [a, b] a una función integrable
s. Muestre que
Z b
Z bX
XZ b
fn (x) dx =
fn (x) dx.
s(x) dx =
a
a
a
Sugerencia: use el Teorema 9.19.
Ejercicio
P 12.12. Sea fn : [a, b] → R una sucesión de funciones tal que
la serie
fn converge en [a, b] a una función s. Suponga además
P 0 que to0
fn converge
das las derivadas fn son continuas en [a, b] y que la serie
uniformemente en [a, b] a una función r. Muestre que
Z x
s(x) − s(a) =
r(t) dt
a
y que
s0 (x)
= r(x) para todo x ∈ [a, b].
Ejercicio 12.13. Sea fn P
: [a, b] → R una sucesión de funciones positivas y
continuas tal que la serie
fn converge a una función continua s en [a, b].
Muestre que
Z b
Z bX
XZ b
s(x) dx =
fn (x) dx =
fn (x) dx.
a
a
a
Ejercicio 12.14. Sea (fP
n )n una sucesión de funciones Riemann integrables
en [a, b] tal que la serie
fn converge uniformemente en [a, b] a la función
s. Defina
Z x
Z xX
n
n Z x
X
Sn (x) :=
sn (t) dt =
fk (t) dt =
fk (t) dt.
a
a k=0
k=0
a
12 Series de funciones
12.3 Series de Taylor
171
Muestre que (Sn )n converge uniformemente en [a, b] a
Z x
s(t) dt.
a
Ejercicio 12.15.
P Sea fn : [a, b] → R una sucesión de funciones continuas
tal que la serie
fn converge uniformemente a una función s : [a, b] → R.
Muestre que
Z b−(b−a)/n
Z b
lim
sn (x) dx =
s(x) dx
n→∞ a
a
P
donde (sn )n es sucesión de sumas parciales asociada a la serie
fn .
Ejercicio 12.16. Verifique que la serie de funciones
∞
X
(−1)n
n=0
n + x2
converge uniformemente en todo R pero que no converge absolutamente para
ningún x ∈ R. ¿Qué se concluye?
Ejercicio 12.17. Verifique que la serie de funciones
∞
X
x(1 − x)n
n=0
converge absolutamente para todo x en [0, 1] pero que no converge uniformemente para ningún x ∈ [0, 1]. ¿Qué se concluye? ¿Qué se puede decir sobre
la serie
∞
X
(−1)n x(1 − x)n
n=0
en el intervalo [0, 1]?
Ejercicio 12.18. Determine el dominio de convergencia de la serie de funciones
n
∞
X
1
x
.
n + 1 2x + 1
n=1
Ejercicio
Muestre que el radio de convergencia de la serie de poP 12.19.
n
tencias
an x también está dado por
lim
n→∞
|an |
.
|an+1 |
Ejercicio 12.20. Verifique que las series de potencias
X xn
X
X xn
1.
xn ,
2.
,
3.
,
n
n2
tienen todas radio de convergencia R = 1. Verifique que la primera no
converge para x = 1 ni para x = −1. Verifique que la segunda converge
para x = −1 pero diverge para x = 1. Verifique que la tercera converge
para ambos x = −1 y x = 1. Encuentre una serie de potencias de radio
172
12 Series de funciones
12.3 Series de Taylor
de convergencia R = 1 que sea convergente para x = 1 pero divergente para
x = −1.
Ejercicio 12.21. Complete los detalles de la demostración del Lema 12.12.
Ejercicio 12.22. Demuestre el Lema 12.13.
Ejercicio P
12.23. Considere una función s definida mediante la serie de
∞
n
potencias
n=0 an x con radio de convergencia R > 0. Defina la nueva
función
∞
X
an n+1
r(x) :=
x
.
n+1
n=0
Muestre que r posee el mismo radio de convergencia y que r0 (x) = s(x) para
todo x en ] − R, R[.
Ejercicio 12.24. Complete los detalles de la demostración del Teorema 12.23.
Ejercicio 12.25. En forma similar al Ejemplo 12.22, estudie la relación
entre la función g(x) = x ln x − x y su serie de Taylor centrada en c = 1.
Ejercicio 12.26. Determine el radio e intervalo de convergencia de las
siguientes series de potencias. En cada caso, si el intervalo de convergencia
es acotado, verifique si la serie converge en los extremos del intervalo.
X na
X nn
X 1
xn ,
2.
xn ,
3.
xn ,
1.
n!
n!
n!
4.
X 1
xn ,
ln n
5.
X n!
xn ,
(2n)!
6.
X 1
√
xn .
n
n
2
Ejercicio 12.27. Considere la función definida mediante s(x) = e−1/x si
x 6= 0 y s(0) = 0. Muestre por inducción que s posee derivadas de todos los
órdenes en todos los puntos y que todas sus derivadas se anulan en x = 0.
De este modo, s(x) es una función no nula cuya expansión de Taylor es cero
en todo punto.
Ejercicio 12.28. Para |x| < 1 ¿qué función representan la series de potencias
∞
∞
X
X
(−1)n 2n
(−1)n 2n+1
x
y
x
?
2n + 1
2n
n=1
n=0
Ejercicio 12.29. Muestre que si |x| < 1 entonces
∞
X
1 · 3 · · · (2n − 1) x2n+1
arcsen x =
.
2 · 4 · · · 2n 2n + 1
n=0
Ejercicio 12.30. Encuentre un desarrollo en series
potencias y su resR x de
2
−t
pectivo intervalo de convergencia para la función 0 e dt.
12 Series de funciones
12.3 Series de Taylor
173
Ejercicio 12.31. Muestre que para |k| < 1 se tiene que
Z π/2
∞ 1
π X 1 · 3 · · · (2n − 1) 2 2n
√
k .
dx =
2
2 · 4 · · · 2n
1 − k 2 sen2 x
0
n=0
Ejercicio 12.32. Enuncie un resultado análogo al Teorema 12.23 para x →
(c − R)+ y demuestre su enunciado.
Ejercicio 12.33. Verifique que
∞
π X (−1)n
=
.
4
2n + 1
n=0
Ejercicio 12.34. Calcule s0 (x) si
1. s(x) =
∞ nx
X
e −1
n=0
2n enx
∞
X
1
1
2. s(x) =
x + nx .
2n
ne
,
n=0
Ejercicio 12.35. Determine el dominio de convergencia de la serie de funciones
∞
X
x2
s(x) =
.
(1 + x2 )n
n=1
¿Cuál es el valor explı́cito de s(x)?
Ejercicio 12.36. Teorema de Bernstein. Muestre que si s posee derivadas no negativas de todos los órdenes en el intervalo [c, c + r] con r > 0
entonces (9) converge a s(x) para todo x ∈ [c, c + r[.
Sugerencia: utilice el Teorema de Taylor con resto integral y el hecho que
cada sn+1 es creciente.
Ejercicio 12.37. Calcule los valores de convergencia de las siguientes series
numéricas. Estudie en cada caso que sucede en los extremos del intervalo.
1.
∞
X
(−1)n
n=0
n!
xn ,
2.
∞
X
(−1)n x3n ,
3.
n=0
∞
X
(−1)n n
x .
(n − 1)n
n=2
Ejercicio 12.38. Calcule los valores de convergencia de las series numéricas
1.
∞
X
(n + 1)(n + 2)
n=0
2n+1
∞
X
(−1)n
3.
,
3n + 1
n=0
,
2.
∞
X
n=0
4.
∞
X
n=1
1
,
(2n + 1)22n+1
n2 2n
.
(n + 1)3n+1
Ejercicio 12.39. Halle la expansión en serie de potencias para la función
s(x) definida mediante s(x) = sen x/x si x 6= 0 y s(0) = 1.
174
12 Series de funciones
12.3 Series de Taylor
Ejercicio 12.40. Muestre que
∞ ∞
X
α n X α(α − 1) · · · (α − n + 1) n
α
(1 + x) =
x =
x
n
n!
n=0
n=0
para todo |x| < 1.
Sugerencia: este ejercicio no es fácil por lo cual es una buena idea visitar
la literatura.
Ejercicio 12.41. Encuentre un desarrollo en series de potencias y su respectivo intervalo de convergencia para la función 1/(1 − x)a .
P
Ejercicio 12.42. Muestre que si s(x) = n an xn es una función par entonces a2n+1 = 0 y que si s(x) es una función impar entonces a2n = 0.
Ejercicio 12.43. Suponga que la sucesión (an )n satisface la fórmula recursiva
an + Aan−1 + Ban−2 = 0, n ≥ 2
para A y B constantes
Muestre que para cualquier x tal que la
P arbitrarias.
serie de potencias
an xn es convergente se tiene que
∞
X
a0 + (a1 + Aa0 )x
.
an xn =
1 + Ax + Bx2
n=0
¿Cuál es el dominio de convergencia?
Ejercicio 12.44. Si (an )n es la sucesión de Fibonacci dada por a0 = a1 = 1,
an+1 = an + an−1 encuentre el valor exacto y el dominio de convergencia de
la serie de potencias
∞
X
an xn .
n=1
Ejercicio 12.45. Halle el valor de convergencia de la serie de funciones
∞
X
(−1)n (2n + 1)xn .
n=0
Ejercicio 12.46. Muestre que para todo |x| < 1 con x 6= 0 se tiene que
∞
X
xn
3x − 2 (1 − x2 )
=
−
ln(1 − x).
(n + 1)(n + 2)(n + 3)
4x2
2x3
n=0
Ejercicio 12.47. Sean s y r dos funciones con expansiones de Taylor
∞
∞
X
X
s(x) =
an (x − c)n ,
r(x) =
bn (x − c)n ,
n=0
n=0
en el intervalo ]c − R, c + R[ para algún R > 0. Muestre que la función s + ar
admite la expansión
∞
X
s(x) + ar(x) =
(an + abn )(x − c)n
n=0
12 Series de funciones
12.3 Series de Taylor
175
en el intervalo ]c − R, c + R[ para todo a ∈ R. En general, el dominio de
convergencia puede ser mayor que el dominio común original. ¿Puede usted
encontrar un ejemplo?
Ejercicio 12.48. Sean s y r dos funciones con expansiones de Taylor
∞
∞
X
X
n
s(x) =
an (x − c) ,
r(x) =
bn (x − c)n ,
n=0
n=0
en el intervalo ]c − R, c + R[ para algún R > 0. Muestre que la función sr
admite la expansión
!
∞
n
X
X
(sr)(x) = s(x)r(x) =
ak bn−k (x − c)n
n=0
k=0
en el intervalo ]c − R, c + R[. En general, el dominio de convergencia puede
ser mayor que el dominio común original. ¿Puede usted encontrar un ejemplo?
Sugerencia: use el Ejercicio 11.27.
Proyecto 12.25. Sean s y r dos funciones con expansiones de Taylor
∞
∞
X
X
s(x) =
an xn ,
r(x) =
bn xn ,
n=0
n=0
en los intervalos ] − R1 , R1 [ y ] − R2 , R2 [ para algunos R1 > 0, R2 > 0
respectivamente.
Suponga que para algún x0 ∈] − R2 , R2 [ se tiene que la
P∞
serie númerica n=0 |bn xn0 | < R1 . Muestre que
(s ◦ r)(x0 ) = s(r(x0 )) =
∞
X
cn xn0 ,
n=0
donde los coeficientes cn se obtienen del producto de Cauchy de n copias de
r(x0 ) de la siguiente manera. Si
!n
∞
∞
X
X
n
k
(r(x0 )) =
bk x0
=
dk (n)xk0
k=0
entonces
ck =
∞
X
k=0
an dk (n).
n=0
Sugerencia: La idea básica es ver que tiene sentido sustituir la serie r(x) en
lugar de x en la serie s(x). Este ejercicio requiere el uso de series dobles, el
cual no forma parte de este curso en la presente forma, pero que se pueden
encontrar en la bibliografı́a.
Ejercicio 12.49. Sea t una función con expansión de Taylor
∞
X
t(x) = a0 +
an xn ,
n=1
176
12 Series de funciones
12.3 Series de Taylor
en el intervalo ] − R, R[ para algún R > 0, donde a0 6= 0. Muestre que 1/t
posee una expansión de Taylor de la forma
∞
X
1
1
(x) =
=
bn xn ,
t
t(x)
n=0
en algún intervalo ] − R1 , R1 [ para algún R1 > 0.
Sugerencia:
(1) Escriba 1/t en la forma
1
1
P∞ an n = s(r(x))
=
t(x)
a0 (1 + n=1 a0 x )
donde
s(y) =
1 1
,
a0 1 + y
r(x) =
∞
X
an+1
n=0
a0
xn+1 .
(2) Verifique que s posee una expansión de Taylor con radio de convergencia 1.
(3) Verifique que la función
∞
X
|an+1 | n+1
x
u(x) =
|a0 |
n=0
se anula en cero, es continua en su dominio, y ası́, existe 0 < R1 < 1
para el cual |u(x)| < 1 para todo x ∈] − R1 , R1 [.
(4) Utilice el proyecto anterior.
Ejercicio 12.50. Calcule b0 , b1 y b2 para
∞
X
sec x =
bn xn .
n=0
Ejercicio 12.51. Busque generalizaciones para el enunciado del Teorema 12.24,
primero para el caso x → −1+ , y segundo para c 6= 0 y R 6= ±1.
177
13. Introducción a la teorı́a de Fourier
Un resultado sorprendente debido a Fourier3 es el hecho que “cualquier”
función se puede “aproximar” mediante combinaciones lineales de senos y
cosenos. En esta sección queremos dar en forma breve, sentido a los términos
“cualquier” y “aproximar” en la oración anterior.
En la primera parte de esta sección vamos a trabajar primero con funciones definidas en intervalos compactos, y luego con funciones definidas
sobre toda la recta real pero que son periódicas con perı́odo 2π. Un simple
cambio de variable permite estudiar el caso general.
En la segunda parte, veremos como, cambiando las combinaciones lineales
de senos y cosenos por integrales que involucran dichas funciones, podemos
recuperar (en alguna medida) una función (no necesariamente periódica)
definida sobre toda la recta real.
13.1. Series de Fourier. Lo primero es asumir que podemos expresar una
función f como el lı́mite de combinaciones lineales de funciones seno y
coseno. Por un momento dejamos de lado el análisis formal, y nos dejamos
llevar por la intuición.
Si tenemos que
∞
a0 X
+
an cos nx + bn sen nx
(13)
f (x) =
2
n=1
y suponemos las hipótesis necesarias para intercambiar series e integrales
entonces, al multiplicar por sen mx e integrar desde −π hasta π tenemos
que
Z π
f (x) sen(mx) dx =
−π
a0
2
π
Z
sen mx dx +
−π
∞
X
an
Z
π
sen mx cos nx dx + bn
sen mx sen nx dx
−π
n=1
Z
π
Z
−π
π
sen2 mx dx = bm π,
= bm
−π
gracias al Ejercicio 5.18 en el cual se probó la ortogonalidad de las funciones
cos nx y sen nx en el intervalo [−π, π]. En forma similar
Z π
f (x) cos(mx) dx =
−π
a0
2
Z
cos mx dx +
−π
=
π
∞
X
n=1
Z
π
an
Z
π
cos mx cos nx dx + bn
−π
a0 π,R
π
am −π cos2 mx dx = am π,
cos mx sen nx dx
−π
si m = 0
si m =
6 0
= am π.
3Jean Baptiste Joseph Fourier matemático francés nació el 21 de marzo de 1768 y murió
el 16 de mayo de 1830.
178
13 Introducción a la teorı́a de Fourier
13.1 Series de Fourier
Definición 13.1. A la serie
∞
a0 X
+
an cos nx + bn sen nx
2
SF(f )(x) :=
n=1
con coeficientes dados por
Z
1 π
f (x) cos nx dx para n = 0, 1, 2, 3, . . . ,
an =
π −π
y
Z
1 π
bn =
f (x) sen nx dx para n = 1, 2, 3, . . . ,
π −π
se le llama la serie de Fourier para la función f en el intervalo [−π, π]. A
los coeficientes an y bn les llamamos coeficientes de Fourier.
Nota. El coeficiente a0 /2 en la serie de Fourier corresponde al valor medio
de la función f en el intervalo [−π, π].
♦
Las preguntas naturales que surge son:
(1) ¿En qué sentido es convergente la serie SF(f )(x)?
(2) ¿Converge la serie SFf (x) precisamente a la función f ?
Es tiempo de ver un ejemplo.
Ejemplo 13.2. La onda cuadrada.
periodo 2π definida mediante
0 si
a si
f (x) :=
b si
◦
•
−2π
◦
b◦
x = 0, π;
x ∈] − π, 0[;
x ∈]0, π[.
◦
◦
◦a
•
•
−π
Considere la función periódica de
◦
•
π
◦
•
2π
Para esta función tenemos que
Z
Z
a 0
b π
a0 =
dx +
dx = a + b,
π −π
π 0
Z
Z
a 0
b π
cos nx dx +
cos nx dx = 0, si n 6= 0,
an =
π −π
π 0
y
a
bn =
π
Z
0
b
sen nx dx +
π
−π
Z
a+b
=
nπ
= (1 − (−1)n )
π
0
0
π
a
b
sen nx dx = −
cos nx −
cos nx
nπ
nπ
−π
0
0
2(a+b)
nπ
si n par,
si n impar.
13 Introducción a la teorı́a de Fourier
13.1 Series de Fourier
179
De este modo
∞
SFf (x) =
a + b X 2(a + b)
+
sen(2n + 1)x.
2
(2n + 1)π
(14)
n=1
Note como SFf (0) = (a + b)/2 mientras que f (0) = 0.
Como veremos en la lista de ejercicios, vamos a poder utilizar las series de
Fourier para calcular valores explı́citos de algunas series numéricas. Más allá
de estas triviales aplicaciones, las series de Fourier han encontrado múltiples
usos, en particular para resolver ecuaciones diferenciales con condiciones de
frontera, material propio para otro curso.
Hasta ahora hemos estudiado en este curso dos tipos de convergencia de
sucesiones y series de funciones, puntual y uniforme. Del ejemplo anterior,
es evidente que SFf (x) no converge necesariamente en forma puntual (y en
consecuencia tampoco en forma uniforme) hacia f (x). Por otra parte, como
∞
|a0 | X
+
|an | + |bn |,
|SFf (x)| ≤
2
n=1
por el criterio M de Weierstrass, es suficiente que esta serie numérica sea
convergente para obtener convergencia uniforme de SFf (x).
Para poder encontrar la convergencia puntual de las series de Fourier
necesitamos algunos resultados previos y notaciones.
Lema 13.3. Forma integral de la serie de Fourier.
Z π
∞ Z
1X π
1
f (ξ) dξ +
f (ξ) cos n(ξ − x) dξ.
SFf (x) =
2π −π
π
−π
n=1
Prueba: Basta notar que
Z π
f (ξ) cos n(ξ − x) dξ
−π
Z π
Z
= cos nx
f (ξ) cos nξ dξ + sen nx
−π
π
f (ξ) sen nξ dξ
−π
para tener el resultado.
Nota. Es usual denotar
f (b− ) := lim f (x)
x→b−
y
f (a+ ) := lim f (x)
x→a+
siempre que dichos lı́mites existan. Además,
f 0 (b− ) := lim
x→b−
f (b− ) − f (x)
b−x
siempre que dichos lı́mites existan.
y
f 0 (a+ ) := lim
x→a+
f (x) − f (a+ )
,
x−a
♦
180
13 Introducción a la teorı́a de Fourier
13.1 Series de Fourier
Lema 13.4. Si la función F posee a lo más una cantidad finita de discontinuidades en el intervalo [0, b], b > 0 y si F (0+ ) y F 0 (0+ ) existen entonces
Z b
sen ny
π
F (y)
lim
dy = F (0+ ).
n→∞ 0
y
2
Prueba: Primero escribimos la integral en cuestión como la suma
Z b
Z b
F (y) − F (0+ )
sen ny
dy +
sen ny dy.
F (0+ )
y
y
0
0
Por el Ejemplo 10.58 y mediante el cambio de variable z = ny, tenemos que
Z b
Z nb
sen ny
sen z
π
lim
dy = lim
dz = .
n→∞ 0
n→∞ 0
y
z
2
Como F posee a lo más una cantidad finita de discontinuidades, lo mismo
es cierto para la función (F (x) − F (0+ ))/x. Además,
F (x) − F (0+ )
,
x
x→0+
el cual existe por hipótesis. Aplicando el lema de Riemann-Lebesgue (Ejercicio 4.52) en cada intervalo en el que (F (x) − F (0+ ))/x es continua, se
tiene
Z b
F (y) − F (0+ )
sen ny dy = 0
lim
n→∞ 0
y
lo cual concluye el resultado.
F 0 (0+ ) = lim
Lema 13.5. Si la función F posee a lo más una cantidad finita de discontinuidades en el intervalo [a, b] y para algún punto x ∈]a, b[ existen F 0 (x− )
y F 0 (x+ ) entonces
Z b
sen n(ξ − x)
F (x+ ) + F (x− )
lim
F (ξ)
dξ = π
.
n→∞ a
ξ−x
2
Prueba: Primero escribimos la integral en cuestión como la suma
Z x
Z b
sen n(x − ξ)
sen n(ξ − x)
F (ξ)
dξ +
F (ξ)
dξ.
x−ξ
ξ−x
a
x
Haciendo los cambios de variable y = x − ξ y y = ξ − x respectivamente
obtenemos
Z x−a
Z b−x
sen ny
sen ny
F (x − y)
dy +
F (x + y)
dy.
y
y
0
0
Ahora bien, si ponemos G(y) = F (x − y) y H(y) = F (x + y) tenemos que
G(0+ ) = F (x− ), H(0+ ) = F (x+ ), G0 (0+ ) = −F 0 (x− ) y H 0 (0+ ) = F 0 (0+ ).
De este modo, al tomar n → ∞ en esta suma de integrales, por el lema
anterior tenemos que el lı́mite es
π
π
(G(0+ ) + H(0+ )) = (F (x− ) + F (x+ ))
2
2
13 Introducción a la teorı́a de Fourier
13.1 Series de Fourier
lo cual concluye el resultado.
181
Teorema 13.6. De convergencia puntual de las series de Fourier.
Sea f una función periódica de periodo 2π que posee solo una cantidad finita
de discontinuidades en el intervalo [−π, π]. Entonces la serie de Fourier
SFf (x) de f (x) converge al valor
f (x− ) + f (x+ )
2
en cada punto x ∈ R en el cual f posee tanto derivada izquierda como
derecha (i.e. f 0 (x− ) y f 0 (x+ ) existen). En particular, SFf (x) converge a
f (x) en los puntos en los que f es continua y f 0 (x− ) y f 0 (x+ ) existen.
Prueba: Usando la forma integral para la serie de Fourier tenemos que la
suma parcial de SFf (x) está dada por
!
Z
n
1 X
1 π
f (ξ)
+
cos m(ξ − x) dξ
SFn (x) =
π −π
2
m=1
Z
1 π
sen((n + 1/2)(ξ − x))
=
f (ξ)
dξ
π −π
2 sen((ξ − x)/2)
Z
1 a+2π
(ξ − x)/2 sen((n + 1/2)(ξ − x))
=
f (ξ)
dξ
π a
sen((ξ − x)/2)
(ξ − x)
Z
1 a+2π
sen((n + 1/2)(ξ − x))
:=
F (ξ)
dξ,
π a
(ξ − x)
donde la segunda identidad trigonométrica se deja como ejercicio para el
lector, y la tercera igualdad sigue del hecho que el integrando es periódico
de periodo 2π. Aquı́ elegimos a de modo tal que a < x < a + 2π.
Queremos aplicar el lema anterior a la función
F (ξ) = f (ξ)
(ξ − x)/2
.
sen((ξ − x)/2)
Primero observamos que F posee una cantidad finita de discontinuidades,
dado que f posee una cantidad finita de discontinuidades en cualquier intervalo de longitud 2π. Segundo, la existencia de F 0 (x− ) y F 0 (x− ) sigue de
la existencia de f 0 (x− ) y f 0 (x− ) y de S 0 (0− ) y S 0 (0+ ) donde
S(ξ) =
ξ/2
ξ/2
=
.
sen(ξ/2)
ξ/2 − ξ 3 /48 + · · ·
De hecho
S 0 (0± ) = lim
ξ→0±
S(ξ) − S(0± )
ξ/2 − sen(ξ/2)
= lim
= 0.
ξ
ξ sen(ξ/2)
ξ→0±
Por último F (x± ) = f (x± ) lo cual concluye el resultado.
182
13 Introducción a la teorı́a de Fourier
13.2 Series de Fourier
Corolario 13.7. Sean f y g funciones periódicas de periodo 2π que poseen
solo una cantidad finita de discontinuidades en el intervalo [−π, π]. Si f y
g comparten los mismos coeficientes de Fourier entonces f (x) = g(x) en los
puntos x en los que ambas f y g son continuas y f 0 (x− ), f 0 (x+ ), g 0 (x− ) y
g 0 (x+ ) existen.
p
Ejemplo 13.8. La función f (x) =
|x| nos brinda un ejemplo de una
0
−
función continua para la cual ni f (0 ) ni f 0 (0+ ) existen. De hecho f (0± ) = 0
por la continuidad de f , pero
f (x) − f (0± )
±1
= lim √ .
±
+
x
x
x→0
x→0
El teorema anterior no garantiza la convergencia de SFf (0).
f 0 (0± ) = lim
En los más de los casos, vamos a querer aproximar en un intervalo compacto una función que no es periódica. Un truco que nos permite utilizar
la teorı́a hasta ahora desarrollada es definir una nueva función, que si sea
periódica, y que se ajuste adecuadamente a la función que queremos aproximar.
Definición 13.9. Sea f una función tal que
i. si f no es continua en x ∈] − π, π[ entonces ambos f (x− ) y f (x+ )
existen,
ii. si f no es continua a la derecha de −π entonces f (−π + ) existe y
iii. si f no es continua a la izquierda de π entonces f (π − ) existe.
Defina la función
si f es continua en x ∈] − π, π[;
f (x),
f (x− )+f (x+ )
˜
,
si f no es continua en x ∈] − π, π[;
f (x) :=
2
f (π− )+f (−π+ ) , x = ±π.
2
Por último, extienda f˜ a todo R mediante f˜(x + 2π) = f (x).
De este modo f˜ es una función que posee solo un número finito de discontinuidades en [−π, π], es periódica de periodo 2π, y en el intervalo [−π, π]
coincide con f excepto en un número finito de puntos. A la función f˜ le
llamamos la extensión periódica de f .
Por el Teorema 13.6 la serie de Fourier SF f˜, la cual coincide con SFf ,
converge puntualmente a f˜ en todo R.
Nota. En caso de tener una función definida en un intervalo [a, b] no necesariamente igual a [−π, π] podemos hacer lo siguiente. Si f : [a, b] → R
posee tan solo un cantidad finita de discontinuidades y en cada punto x
de discontinuidad se tiene que ambas f 0 (x± ) existen entonces, mediante el
cambio de variable y = (2π)(x − a)/(b − a) − π, podemos asumir sin pérdida
de generalidad que a = −π y b = π.
♦
A continuación estudiamos la convergencia uniforme, y un nuevo tipo de
convergencia llamada convergencia en norma, para las series de Fourier.
13 Introducción a la teorı́a de Fourier
·
·
−π
−3π
13.2 Convergencia en norma
·
π
183
·
3π
13.2. Convergencia en norma. En esta sección estudiamos un nuevo tipo
de convergencia, la convergencia en norma, y su relación con la convergencia
uniforme y absoluta para series de Fourier.
Definición 13.10. Una sucesión de funciones integrables (fn )n converge
en norma a una función integrable f en un intervalo [a, b] si
Z b
2
(||fn − f ||2 ) :=
(fn (x) − f (x))2 dx →n→∞ 0.
a
Ejemplo 13.11. Una sucesión de funciones puede converger en norma a
dos funciones diferentes. Por ejemplo, la sucesión (xn )n en el intervalo [0, 1]
coverge en norma a cualquier función f que sea igual a 0 excepto en una
cantidad finita de puntos, dado que la integral de Riemann no persive dichas
variaciones.
Z 1
Z 1
1
2
n
= 0.
lim
(x − f (x)) dx = lim
x2n dx = lim
n→∞ 0
n→∞ 0
n→∞ 2n + 1
Sin embargo, dentro de todos esos posibles lı́mites, solo puede haber a lo
sumo, una función continua.
Lema 13.12. Si una sucesión de funciones integrables (fn )n converge en
norma a una función integrable en un intervalo [a, b] entonces, a lo sumo
existe una función continua en [a, b] que es el lı́mite en norma de dicha
sucesión.
Prueba: Observemos que el enunciado no dice que existe una función lı́mite
que es continua. Dice que si existe una función lı́mite que es continua,
entonces esta debe de ser única. Supongamos que existen funciónes continuas f y g en [a, b] tales que la sucesión de las fn converge en norma tanto
a f como a g. Gracias al Ejercicio 13.3, ||f − g||2 ≤ ||f − fn ||2 + ||fn − g||2 .
Al tomar n → ∞ tenemos que
Z b
2
f (x) − g(x) dx = 0.
a
Como (f (x) −
g(x))2
es continua y positiva concluimos que f = g.
184
13 Introducción a la teorı́a de Fourier
13.2 Convergencia en norma
A continuación mostramos que la serie de Fourier de una función con
las hipótesis adecuadas converge uniformemente y por ende en norma a la
función original.
Nota. La serie de Fourier de una función discontinua no puede converger
uniformemente a la función original dado que, las sumas parciales de Fourier
son funciones continuas (el lı́mite uniforme de funciones continuas es continuo).
♦
El primer resultado relaciona convergencia uniforme con convergencia en
norma.
Lema 13.13. Si la sucesión de funciones integrables (fn )n converge uniformemente a una función integrable f en un intervalo compacto [a, b] entonces (fn )n también convergen en norma a f .
Prueba: Dado ε > 0 existe N ∈ N tal que |fn (x) − f (x)| < ε para todo
n ≥ N y todo x ∈ [a, b]. De este modo
Z b
(fn (x) − f (x))2 dx < ε2 (b − a),
∀ n ≥ N,
a
lo cual brinda el resultado.
Nota. Observe como el recı́proco de este resultado no es cierto. Basta
redefinir la función f en una cantidad finita de puntos para obtener una
nueva función con la misma integral pero con la diferencia entre las dos tan
grande como se quiera.
♦
Ahora retomamos el Ejercicio 5.22 donde definimos por primera vez los
coeficientes de Fourier an y bn . No es difı́cil mostrar que para cualesquiera
números ci y di :
2
Z π
N
c0 X
cn cos nx + dn sen nx
dx
+
f (x) −
2
−π
n=1
2 X
Z π
N
a
=
f 2 (x) dx − π 0 +
a2n + b2n
2
−π
n=1
N
c0
a0 2 X
2
2
√ −√
+π
+
(cn − an ) + (dn − bn ) .
2
2
n=1
De este modo, la primera integral es mı́nima cuando ci = ai y di = bi , y en
dicho caso
2
Z π
N
a0 X
f (x) −
+
an cos nx + bn sen nx
dx
2
−π
n=1
2 X
Z π
N
a0
2
2
2
=
f (x) dx − π
+
(15)
an + bn .
2
−π
n=1
13 Introducción a la teorı́a de Fourier
13.2 Convergencia en norma
185
Del razonamiento anterior se deducen tres resultados importantes con hipótesis mı́nimas para la función f .
Lema 13.14. La suma parcial SFN f de la serie de Fourier de una función
f integrable en [−π, π] es la que minimiza
2
Z π
N
c0 X
f (x) −
+
cn cos nx + dn sen nx
dx
2
−π
n=1
entre todas las posibles funciones de la forma
N
c0 X
+
cn cos nx + dn sen nx.
2
n=1
Como la integral de una función al cuadrado es siempre mayor que o igual
a cero concluimos el siguiente resultado.
Lema 13.15. Desigualdad de Bessel. Los coeficientes de Fourier an y
bn de una función f integrable en [−π, π] satisfacen
Z π
2 X
n
a0
2
2
+
am + bm ≤
f 2 (x) dx,
∀ n ∈ N.
π
2
−π
m=1
Corolario 13.16. La serie
∞
a20 X 2
+
an + b2n
2
n=1
formada con los cuadrados de los coeficientes de Fourier an y bn de una
función f integrable en [−π, π] es convergente. Por ende, ambos an y bn
tienden a 0 conforme n → ∞.
Nota. De la convergencia de la serie anterior, se deduce la convergencia de
cada una de las series
X
X
a2n
y
b2n
por separado. Además de la desigualdad de Cauchy
!2
! n
!
n
n
X
X
X
an bn
≤
a2n
b2n
k=1
k=1
se deduce la convergencia absoluta de la serie
X
an bn .
k=1
♦
A continuación relacionamos los coeficiente de Fourier de f 0 con los de f .
Lema 13.17. Si f es una función continua y periódica de periodo 2π, cuya
primera derivada es continua excepto por una cantidad finita de puntos en
186
13 Introducción a la teorı́a de Fourier
13.2 Convergencia en norma
el intervalo [−π, π] entonces, αn = nbn y βn = −nan para todo n = 1, 2, . . . ,
donde αn y βn son los coeficientes de Fourier de f 0 . En particular las series
X
X
X
n2 a2n ,
n2 b2n ,
n2 an bn
son todas (absolutamente) convergentes.
Prueba: Sin pérdida de generalidad podemos suponer que f (−π) = f (π).
Siguiendo los pasos del lema de Riemann-Lebesgue (Ejercicio 4.52), mediante integración por partes (en una cantidad finita de intervalos de ser
necesario dado que f 0 es continua excepto en una cantidad finita de puntos)
Z
1 π 0
αn :=
f (x) cos nx dx
π −π
π
Z
1
n π
= − f (x) cos nx +
f (x) sen nx dx = nbn
π
−π π −π
y
Z
1 π 0
f (x) sen nx dx
βn :=
π −π
π
Z
1
n π
= f (x) sen nx −
f (x) cos nx dx = −nan ,
π
−π π −π
lo cual concluye el resultado.
Teorema 13.18. Convergencia uniforme de las series de Fourier.
Si f es una función continua y periódica de periodo 2π, cuya primera derivada es continua excepto por una cantidad finita de puntos en el intervalo
[−π, π] entonces, SFf (x) converge uniformemente y absolutamente en todo
R a f (x).
Prueba: Primero observamos que
|SFn f (x)| ≤
n
n
k=1
k=1
|a0 | X
|a0 | X
+
|ak cos kx| + |bk sen kx| ≤
+
|ak | + |bk |.
2
2
De este modo, la convergencia de la serie numérica a la derecha implica la
convergencia uniforme y absoluta de la serie de Fourier de f . Como
n
X
n
X
1
1
|ak | + |bk | =
|αk | + |βk |
k
k
k=1
k=1
X
n
1/2 X
1/2 n
n
1 1/2 X
2
2
≤
|αk |
+
|βk |
k2
k=1
k=1
k=1
por la desigualdad de Cauchy, tenemos que la serie a la izquierda es convergente, lo cual concluye el resultado.
13 Introducción a la teorı́a de Fourier
13.2 Convergencia en norma
187
Es posible, pidiendo a f las hipótesis adecuadas, lograr igualdad en la
desigualdad de Bessel. Además, observe como gracias a (15) los siguiente
dos resultados son equivalentes.
Teorema 13.19. Identidad de Parseval Para una función f con una
cantidad finita de discontinuidades en [−π, π] y periódica de periodo 2π la
serie de cuadrados de los coeficientes de Fourier satisface
Z
∞
a20 X 2
1 π
2
(f (x))2 dx.
+
an + bn =
2
π −π
n=1
Teorema 13.20. De convergencia en norma. Para una función f con
una cantidad finita de discontinuidades en [−π, π] y periódica de periodo 2π
la serie de Fourier SFf converge en norma a f .
Prueba: Como f posee solo una cantidad finita de discontinuidades, dado
ε > 0 existe una función g continua, lineal por partes y de periodo 2π tal
que ||f − g||2 < ε. Los detalles de la existencia de dicho g se dejan como
Ejercicio 13.1 para el lector.
Del teorema de convergencia uniforme de las series de Fourier, sabemos
que existe N ∈ N tal que |SFn (g)(x) − g(x)| < ε para todo x ∈ [−π, π] y
n ≥ N . Por la desigualdad triangular para la norma (Ejercicio 13.3) se tiene
que
p
||f − SFN (g)||2 ≤ ||f − g||2 + ||g − SFN (g)||2 < ε + (b − a)ε,
lo cual concluye el resultado.
Dado que ya tenemos la convergencia uniforme de las series de Fourier
bajo las condiciones apropiadas, ya podemos estudiar la integración y la
derivación de las series de Fourier término a término. Véanse los Ejercicios 13.5 y 13.6.
13.2.1. Ejercicios.
Ejercicio 13.1. Muestre que si f posee solo una cantidad finita de discontinuidades en [−π, π] y es periódica de periodo 2π, dado ε > 0 existe una
función g continua, lineal por partes y de periodo 2π tal que ||f − g||2 ε.
Sugerencia: trate de imitar la prueba del Teorema 9.24 .
Ejercicio 13.2. Muestre la desigualdad de Cauchy:
!2
! n
!
n
n
X
X
X
2
2
an bn
≤
an
bn .
k=1
k=1
k=1
Ejercicio 13.3. Muestre la desigualdad triangular para || · ||2 . Esto es, para
todas funciones integrables f y g en [a, b] se tiene
||f + g||2 ≤ ||f ||2 + ||g||2 .
Sugerencia: vea el Ejercicio 4.10.
188
13 Introducción a la teorı́a de Fourier
13.2 Convergencia en norma
Ejercicio 13.4. Muestre que si f es una función par entonces bn = 0 para
todo n = 1, 2, . . . y si f es impar entonces an = 0 para todo n = 0, 1, 2, . . .
donde an y bn son los coeficientes de Fourier. ¿Qué puede decir sobre los
coeficientes an y bn en cada caso respectivo?
Ejercicio 13.5. Muestre que si f es una función continua y periódica de
periodo 2π, cuya primera derivada es continua excepto por una cantidad
finita de puntos en el intervalo [−π, π] entonces su serie de Fourier SFf (x)
es derivable en cada punto en el cual f 00 (x) existe y se tiene que
0
(SFf (x)) =
∞
X
nbn cos nx − nan sen nx = SFf 0 (x).
n=1
Ejercicio 13.6. Muestre que si f es una función continua excepto por una
cantidad finita de puntos en el intervalo [−π, π] y periódica de periodo 2π,
entonces para x ∈ [−π, π] se tiene
Z x
∞
X
1
1
a0
an sen nx − bn (cos nx − cos nπ).
SF(f )(y) dy = (x + π) +
2
n
n
−π
n=1
Ejercicio 13.7. Teorema de aproximación de Weierstrass mediante
polinomios trigonométricos. Muestre que toda función continua de periodo p > 0 se puede aproximar uniformemente por polinomios trigonométricos de la forma
n
X
2kπx
2kπx
a0 +
ak cos
+ bk sen
.
p
p
k=1
Ejercicio 13.8. Para cada una de las funciones siguientes encuentre la
serie de Fourier.
a, −l ≤ x < 0,
1. f (x) =
f (x + 2l) = f (x),
b, 0 ≤ x ≤ l,
2. g(x) =
3. h(x) =
4. i(x) =
−l − x, −l ≤ x < 0,
l − x, 0 ≤ x ≤ l,
g(x + 2l) = g(x),
x + 1, −1 ≤ x < 0,
x, 0 ≤ x ≤ 1,
h(x + 2) = h(x),
x, −1 ≤ x < 0,
1, 0 ≤ x ≤ 1,
i(x + 2) = i(x),
5. j(x) = −x, −l ≤ x ≤ l,
j(x + 2l) = j(x),
6. k(x) = x, −l ≤ x ≤ l,
k(x + 2l) = k(x),
7. m(x) = 1 − x2 , −1 ≤ x ≤ 1,
m(x + 2) = m(x).
13 Introducción a la teorı́a de Fourier
13.2 Convergencia en norma
189
Ejercicio 13.9. Use el resultado (14) para la serie de Fourier de la onda
cuadrada para concluir que
∞
π X (−1)n
=
.
4
2n + 1
n=0
Ejercicio 13.10. Calcule la serie de Fourier para la onda triangular
−x, −l ≤ x < 0,
f (x) =
f (x + 2l) = f (x).
x, 0 ≤ x ≤ l,
Deduzca que
∞
1
π2 X
=
.
8
(2n + 1)2
n=0
Ejercicio 13.11. Muestre que cada uno de los siguientes desarrollos es
válido en el intervalo indicado.
∞
1.
π X sen(2n − 1)x
=
,
4
2n − 1
]0, π[.
n=1
∞
π
4 X cos(2n − 1)x
2. x = −
, [0, π].
2 π
(2n − 1)2
n=1
3. x = 2
∞
X
(−1)n−1 sen nx
n
n=1
4. x = π − 2
∞
X
sen nx
n=1
n
,
,
] − π, π[.
]0, 2π[.
Ejercicio 13.12. Muestre que cada uno de los siguientes desarrollos es
válido en el intervalo indicado.
∞
X cos nx
π2
x2
− πx = − + 2
1.
,
2
3
n2
]0, 2π[.
n=1
∞
2. x2 −
X cos nx π sen nx 4π 2
=4
−
, ]0, 2π[.
3
n2
n
n=1
∞
3. x2 =
X (−1)n cos nx
π2
+4
,
3
n2
n=1
Deduzca que ζ(2) = π 2 /6.
[−π, π].
190
13 Introducción a la teorı́a de Fourier
13.2 Convergencia en norma
Ejercicio 13.13. Muestre que cada uno de los siguientes desarrollos es
válido en el intervalo indicado.
∞
8 X n sen 2nx
1. cos x =
,
π
4n2 − 1
]0, π[.
n=1
∞
X (−1)n n sen nx
1
2. x cos x = − sen x + 2
, ] − π, π[.
2
n2 − 1
n=2
3. sen x =
∞
4 X cos 2nx
2
−
,
π π
4n2 − 1
]0, π[.
n=1
∞
X (−1)n cos nx
1
4. x sen x = 1 − cos x − 2
, ] − π, π[.
2
n2 − 1
n=2
Ejercicio 13.14. Muestre que cada uno de los siguientes desarrollos es
válido con las condiciones indicadas.
∞
X
x cos nx
1. ln sen = − ln 2 −
,
2
n
si x 6= 2kπ.
n=2
∞
X
(−1)n cos nx
x , si x 6= (2k + 1)π.
2. ln cos = − ln 2 −
2
n
n=2
∞
X
cos(2n − 1)x
x ,
3. ln tan = −
2
2n − 1
si x 6= kπ.
n=1
Ejercicio 13.15. ¿Qué series conocidas
a partir de los
Pahora
P puede ncalcular
∞
n /n.
2 ó
(−1)
(−1)
/n
resultados anteriores? Por ejemplo ∞
n=1
n=1
Ejercicio 13.16. Halle una función continua en el intervalo [−π, π] que
genere la serie de Fourier
∞
X
(−1)n
n=1
n3
sen nx.
Utilice la fórmula de Parseval para mostrar que ζ(6) = π 6 /945.
Ejercicio 13.17. Muestre que ζ(4) = π 4 /90.
Ejercicio 13.18. La fórmula integral general. Muestre que si f es
continua y periódica de periodo 2l, y posee una derivada que es continua
13 Introducción a la teorı́a de Fourier
13.2 Convergencia en norma
191
excepto en un número finito de puntos en el intervalo [−l, l], entonces
Z
1 l
f (x) =
f (ξ) dξ
(16)
2l −l
Z l
Z l
∞ X
1
nπ
nπ
1
nπ
nπ
+
cos
x
f (ξ) cos
ξ dξ + sen
x
f (ξ) sen
ξ dξ .
l
l
l
l
l
l
−l
−l
n=1
Sugerencia: haga un cambio de variable adecuado.
Ejercicio 13.19. Haciendo uso de f˜, la extensión periódica de f , muestre
que es posible recuperar toda función continua f que posee una derivada que
es continua excepto en un número finito de puntos en un intervalo cerrado
y acotado, mediante polinomios trigonométricos en dicho intervalo.
Proyecto 13.21. El fenómeno de Gibbs. Defina
1 si 0 < x < π,
−1 si − π < x < 0,
f (x) =
0 si x = 0 ó x = π,
y extienda f a todo R mediante f (x + 2π) = f (x).
(1) Muestre que
∞
4 X sen(2n − 1)x
,
f (x) =
π
2n − 1
∀ x ∈ R.
n=1
(2) Denote mediante sn la n-ésima suma parcial de la serie anterior y
muestre que
Z
2 x sen 2nt
dt.
sn (x) =
π 0 sen t
(3) Muestre que el el intervalo ]0, π[ la función sn (x) tiene máximos
locales en x2k−1 con k = 1, 2, . . . , n y mı́nimos locales en x2k con
k = 1, 2, . . . , n − 1 donde xk = kπ/(2n).
(4) Muestre que sn (π/(2n)) es el mayor de los números sn (xk ) con k =
1, 2, . . . , 2n − 1.
(5) Interprete sn (x) como una suma de Riemann para mostrar que
π 2 Z π sen t
dt.
=
lim sn
n→∞
2n
π 0
t
El valor de dicho lı́mite es aproximadamente 1, 179. Sin embargo f tiene
un salto en el origen de ancho 2. Es decir, las aproximaciones sn de f tienden
hacia un segmento vertical sobre x = 0 de ancho aproximadamente 2, 358.
Proyecto 13.22. En este proyecto se muestran resultados importantes relacionados con la teorı́a de Fourier.
Defina las funciones Dn (x) mediante
(
n
sen(n+1/2)t
1 X
si t 6= 2mπ, m ∈ Z,
2 sen t/2
cos kt =
Dn (t) := +
2
n + 1/2
si t = 2mπ, m ∈ Z.
k=1
192
13 Introducción a la teorı́a de Fourier
13.3 Integrales de Fourier
Cada función Dn se llama núcleo de Dirichlet.
(1) Muestre que para f una función periódica de periodo 2π con una
cantidad finita de discontinuidades en cada intervalo de longitud 2π,
Z
2 π f (x + t) + f (x − t)
SFn f (x) =
Dn (t) dt.
π 0
2
(2) Demuestre el Teorema de localización de Riemann. Para f
una función con una cantidad finita de discontinuidades en cada
intervalo de longitud 2π, periódica de periodo 2π la serie de Fourier
SFf converge en x si y solo si para algún 0 < δ < π el lı́mite
Z
2 δ f (x + t) + f (x − t)
Dn (t) dt
lim
n→∞ π 0
2
existe.
(3) Para f una función con una cantidad finita de discontinuidades en
cada intervalo de longitud 2π, periódica de periodo 2π muestre que
SF0 (x) + · · · + SFn−1 (x)
.
n
Z π
f (x + t) + f (x − t) sen2 nt/2
1
=
dt.
nπ 0
2
sen2 t/2
σn (x) :=
(4) Teorema de Fejér. Para f una función con una cantidad finita
de discontinuidades en cada intervalo de longitud 2π, periódica de
periodo 2π defina
f (x + t) + f (x − t)
2
siempre que dicho lı́mite exista. Muestre que para aquellos x para los
cuales este lı́mite existe SFf (x) es Česaro sumable (Ejercicio 11.17)
y
lim σn (x) = s(x).
s(x) := lim
t→0+
n→∞
Además, si f es continua, (σn )n converge uniformemente a f en
[−π, π].
13.3. Integrales de Fourier. En el Ejercicio 13.18 vimos como es posible
expresar una función continua y periódica de periodo 2l, que posee una
derivada continua excepto en un número finito de puntos en el intervalo
[−l, l] mediante la fórmula integral general (16).
En esta sección queremos buscar una representación similar que sea válida
en toda la recta real en el caso en que la función f no sea periódica.
En forma intuitiva, nuestra intención es tomar el lı́mite cuando l tiende a
infinito en (16). El resto del trabajo es mostrar hasta que punto es posible
tomar dicho lı́mite de modo tal que la expresión resultante tenga sentido.
13 Introducción a la teorı́a de Fourier
13.3 Integrales de Fourier
193
R∞
La primer observación es que si −∞ f (ξ) dξ existe entonces el primer
sumando en (16) va a tender a cero.
Segundo, si definimos ∆η = π/l entonces el segundo sumando en (16) se
escribe como
Z
∞ X
1 l
f (ξ) cos(n∆ηξ) dξ
cos(n∆ηx)
π −l
n=1
Z
1 l
f (ξ) sen(n∆ηξ) dξ ∆η.
+ sen(n∆ηx)
π −l
En esta suma formal, los números n∆η forman una partición uniforme del
intervalo infinito [0, ∞[. Al tomar l → ∞ la intuición nos invita a comparar
el lı́mite resultante con la expresión
Z ∞
Z ∞
1
cos(ηx)
f (ξ) cos(ηξ) dξ
π −∞
0
Z ∞
1
+ sen(ηx)
f (ξ) sen(ηξ) dξ
dη.
π −∞
13.23. Si la función f : R → R es tal que la integral impropia
RDefinición
∞
|f
(x)|
dx
es convergente, entonces definimos las transfomadas coseno
−∞
y seno de Fourier para la función f mediante:
Z
Z
1 ∞
1 ∞
Fc f (η) :=
f (ξ) cos(ηξ) dξ y Fs f (η) :=
f (ξ) sen(ηξ) dξ,
π −∞
π −∞
respectivamente. A la expresión
Z ∞
FIf (x) :=
cos(ηx)Fc f (η) + sen(ηx)Fs f (η) dη
0
Z Z
1 ∞ ∞
f (ξ) cos η(ξ − x) dξ dη,
=
π 0
−∞
le llamamos la fórmula integral de Fourier.
Nuestro objetivo a partir de ahora es estudiar la relación
f (x) = FIf (x).
El primer paso es una versión del Lema 13.4 para integrales impropias.
Lema 13.24. Sea f una función que posee solo una cantidad finita de discontinuidades en cualquier intervalo acotado de la recta real y redefina f en
los puntos x0 de discontinuidad mediante
−
f (x+
0 ) + f (x0 )
.
2
R∞
Si ∞ |f (x)| dx existe, entonces en cada punto x ∈ R en el que ambas f 0 (x+ )
y f 0 (x− ) existen, se tiene la fórmula
Z ∞
sen b(ξ − x)
lim
f (ξ)
dξ = πf (x).
b→∞ −∞
ξ−x
194
13 Introducción a la teorı́a de Fourier
13.3 Integrales de Fourier
Prueba: La función
g(ξ, b, x) := bf (ξ)
sen b(ξ − x)
b(ξ − x)
es una función que posee solo una cantidad finita de discontinuidades en la
variable ξ en cualquier intervalo cerrado y acotado. Además
|g(ξ, b, x)| ≤ |bf (ξ)|,
por lo cual la integral impropia
Z ∞
sen b(ξ − x)
f (ξ)
dξ
ξ−x
−∞
existe. Escribamos
Z
∞
g(ξ, b, x) dξ − πf (x)
h(b, x) :=
−∞
y mostremos que para cada x fijo y ε > 0 existe Bε tal que |(b, x)| < ε,
siempre que b > Bε , lo cual es suficiente para concluir el resultado.
De hecho, si tomamos un intervalo ]a, b[ que contenga al punto ξ = x
entonces
Z a
Z b
Z ∞
|h(b, x)| = g(ξ, b, x) dξ +
g(ξ, b, x) dξ − πf (x) +
g(ξ, b, x) dξ −∞
Z
a
≤
−∞
a
Z b
Z
|g(ξ, b, x)| dξ + g(ξ, b, x) dξ − πf (x) +
a
b
∞
|g(ξ, b, x)| dξ
b
y
Z
a
Z
a
|g(ξ, b, x)| dξ ≤
−∞
−∞
1
|f (ξ)|
dξ ≤
|x − ξ|
x−a
Z
a
|f (ξ)| dξ.
−∞
La integral a la derecha es independiente de b y tiende a cero conforme a
tiende a −∞. De este modo, dado ε > 0 existe A tal que
Z A
ε
|g(ξ, b, x)| dξ < .
3
−∞
Del mismo modo, existe B tal que
Z ∞
ε
|g(ξ, b, x)| dξ < ,
3
B
y ası́
Z
2ε b
g(ξ, b, x) dξ − πf (x) .
|h(b, x)| <
+
3
a
Por el Lema 13.4, existe Bε tal que la diferencia a la derecha es menor que
ε/3 siempre que b > Bε , lo cual concluye el resultado.
13 Introducción a la teorı́a de Fourier
13.3 Integrales de Fourier
195
Teorema 13.25. De convergencia puntual de la integral de Fourier.
Sea f una función que posee solo una cantidad finita de discontinuidades en
cualquier intervalo acotado de la recta real y redefina f en los puntos x0 de
discontinuidad mediante
−
f (x+
0 ) + f (x0 )
.
2
R∞
Si ∞ |f (x)| dx existe, entonces en cada punto x ∈ R en el que ambas f 0 (x+ )
y f 0 (x− ) existen, la función f satisface la fórmula
f (x) = FIf (x).
Prueba: El primer paso es notar que la fórmula del lema anterior se puede
escribir en forma integral como
Z ∞
Z b
πf (x) = lim
f (ξ)
cos η(ξ − x) dη dξ.
b→∞ −∞
0
Por hipótesis y el Ejercicio 10.41, la integral
Z ∞
f (ξ) cos η(ξ − x) dξ
−∞
es uniformemente convergente. Ası́
Z bZ ∞
Z
f (ξ) cos η(ξ − x) dξ dη =
0
−∞
∞
−∞
Z
b
cos η(ξ − x) dη dξ
f (ξ)
0
y entonces al tomar el lı́mite cuando b → ∞ se tiene que
Z ∞Z ∞
πf (x) =
f (ξ) cos η(ξ − x) dξ dη
0
−∞
lo cual concluye el resultado.
El siguiente paso en el desarrollo de la teorı́a de Fourier es el estudio de
la llamada transformada de Fourier. Dicho objeto escapa el alcance de este
curso simplemente por la limitante del tiempo. Dado que ya se tienen todas
las herramientas necesarias, invitamos al lector a explorar las restantes áreas
de esta teorı́a.
13.3.1. Ejercicios.
Ejercicio 13.20. Muestre que
Z ∞
Z ∞
sen η(1 − x) + sen η(1 + x)
sen η cos ηx
dη = 2
dη
η
η
0
0
π si |x| < 1;
0 si |x| > 1;
=
π
si |x| = 1.
2
196
13 Introducción a la teorı́a de Fourier
Ejercicio 13.21. Muestre que
π
Z ∞
−2
sen kt
0
dt =
π
t
0
2
13.3 Integrales de Fourier
si k < 0;
si k = 0;
si k > 0.
Sugerencia: para a > 0 considere la función que vale cero en ] − ∞, −a] ∪
{0} ∪ [a, ∞[, π/2 en ]0, a[ y −π/2 en ] − a, 0].
Ejercicio 13.22. Muestre que
−x
Z ∞
e
cos ηx + η sen ηx
1
1
dη =
2
π 0
1 + η2
0
si x > 0;
si x = 0;
si x < 0.
Ejercicio 13.23. Muestre que
Z
2 ∞ cos ηx
dη.
e
=
π 0 1 + η2
Ejercicio 13.24. Muestre que
Z ∞
0
1
cos ηx + cos η(π − x)
sen x
dη
=
π 0
1 − η2
0
−|x|
Deduzca que
Z
0
∞
si x ≤ 0;
si 0 ≤ x ≤ π;
si x ≥ π.
cos πη/2
π
dη = .
2
1−η
2
Ejercicio 13.25. Muestre que
Z
x −|x|
2 ∞ η sen ηx
dη =
e
si x 6= 0.
π 0 1 + η2
|x|
Ejercicio 13.26. Muestre que para todo y ∈ R:
r Z ∞
2
2
2
1. e−y /2 =
e−x /2 cos xy dx,
π 0
r Z ∞
2
2
2
2. ye−y /2 =
xe−x /2 sen xy dx.
π 0
Ejercicio 13.27. ¿Qué sucede con Fc f y Fs f cuando f es una función par?
¿Qué sucede con Fc f y Fs f cuando f es una función impar?
Ejercicio 13.28. Muestre que con las hipótesis apropiadas Fc (f + ag) =
Fc f + aFc g y Fs (f + ag) = Fs f + aFs g para funciones f y g y a constante.
¿Qué condiciones deben de satisfacer las funciones f y g?
Ejercicio 13.29. Escriba
f (x) + f (−x) f (x) − f (−x)
+
2
2
para mostrar que toda función es la suma de una función par y una función
impar. ¿En qué forma ayuda dicha descomposición en el estudio de las series
y las integrales de Fourier? Proporcione ejemplos.
f (x) =
197
14. Productos infinitos
En esta sección estudiamos los productos infinitos. Como una aplicación
particular, queremos mostrar
de Euler el cual expresa la función
P un teorema
−s como un producto infinito en términos
n
zeta de Riemann ζ(s) = ∞
n=1
de números primos:
ζ(s) =
∞
X
n
−s
=
n=1
∞
Y
1
,
1 − p−s
k
k=1
∀s > 1
donde pk es el k-ésimo número primo.
Note como las p-series de la Sección 11 son precisamente ζ(p). En la
Sección 13 veremos como calcular algunas de las ζ(s).
El primer paso es dar sentido a un producto infinito
∞
Y
ak .
k=1
En forma similar a las series númericas, podemos tratar de estudiar los
productos parciales
n
Y
pn :=
ak = a1 a2 · · · an .
k=1
La primer limitante es que si ak = 0 para algún k entonces pn = 0 para
todo n ≥ k. Esta situación motiva la siguiente definición para el producto
infinito.
Q
Definición 14.1. Sea (an )n una sucesión numérica y sean pn = nk=1 ak
los productos parciales.
a. Si an 6= 0 para todo n y Q
existe p ∈ R \ {0} tal que (pn )n converge a
∞
p
entonces
decimos
que
n=1 an es convergente a p y escribimos
Q∞
a
:=
p.
n
n=1
b. Q
Si an 6= 0 para todo n y (pn )n converge a 0 entonces decimos que
∞
4
n=1 an es nulo convergente.
Q
c. Si an = 0 para una cantidad infinita de los an entonces ∞
n=1 an := 0.
d. Si an = 0 para una cantidad finita de
los
a
entonces
existe
N ∈N
n
Q
tal que an 6= 0 para todoQn ≥ N. Si ∞
a
converge
en
el
sentido
n=N n
a. anterior decimos que ∞
n=1 an es convergente y escribimos
∞
Y
n=1
an = a1 a2 · · · aN −1
∞
Y
an .
n=N
Q
Note que si ak = 0 para algún k = 1, 2, . . . , N −1 entonces ∞
n=1 an =
0.
Q
e. Decimos que
an es divergente si no es convergente en ninguno
de los sentidos anteriores.
4Algunos autores dicen que en este caso el producto es divergente a cero.
198
14 Productos infinitos
Ejemplo 14.2. Si an = 1 + 1/n tenemos que
1
(n + 1)!
1
··· 1 +
=
pn = (1 + 1) 1 +
=n+1
2
n
n!
Q
por lo cual (1 + 1/n) es divergente.
Ejemplo 14.3. Si an = 1 − 1/n para n ≥ 2 tenemos que
1
(n − 1)!
1
1
··· 1 −
=
=
pn = 1 −
2
n
n!
n
Q
por lo cual (1 − 1/n) es nulo convergente.
Ejemplo 14.4. Si an = n2 /(n2 − 1) para n ≥ 2 tenemos que
32
42
(n − 2)2
(n − 1)2
n2
22
·
·
·
22 − 1 32 − 1 42 − 1
(n − 2)2 − 1 (n − 1)2 − 1 n2 − 1
(n!)2
=
1 · 3 · 2 · 4 · 3 · 5 · · · (n − 3)(n − 1)(n − 2)n(n − 1)(n + 1)
2(n!)2
2n
=
=
→n→∞ 2,
2
((n − 1)!) n(n + 1)
n+1
Q
por lo cual n2 /(n2 − 1) = 2.
pn =
Una vez más, podemos establecer una
Q condición de tipo Cauchy para
la convergencia de productos infinitos an que no son nulos convergentes.
Como lim pn 6= 0 se tiene que (|pn |)n está acotada inferiormente digamos
por M > 0. La sucesión (pn )n es convergente si y solo si es de Cauchy, es
decir, para todo ε > 0 existe N ∈ N tal que |pm − pn | < εM para todo
m ≥ n ≥ N.
Como pm = pn an+1 · · · am la condición anterior se puede escribir
|an+1 · · · am − 1| <
εM
≤ ε,
|pn |
∀ m ≥ n ≥ N.
Lema 14.5. Criterio de Cauchy
Q para la convergencia de productos
infinitos. El producto infinito
an es convergente (pero no nulo convergente) si y solo si para todo ε > 0 existe N ∈ N tal que
|an+1 · · · am − 1| < ε,
∀ m ≥ n ≥ N.
Prueba: Nos falta mostrar el recı́proco. Por hipótesis, existe N ∈ N tal que
an 6= 0 si n ≥ N.
Si tomamos ε = 1/2 entonces para n ∈ N se tiene que
aN (1/2) · · · aN (1/2)+n − 1 < 1 y ası́ 1 < aN (1/2) · · · aN (1/2)+n < 3 .
2
2
2
De este modo, en caso de converger, no es posible que la sucesión de los
qn := aN (1/2) · · · aN (1/2)+n tienda a 0. Para ver que la sucesión (qn )n es
14 Productos infinitos
199
convergente nos damos un ε > 0. Por hipótesis, para n y k suficientemente
grandes se tiene que
qn+k
= aN (1/2)+n+1 · · · aN (1/2)+n+k − 1 < ε,
−
1
qn
por lo cual
3ε
.
2
Por la condición de Cauchy
Q para sucesiones se concluye que (qn )n es convergente y en consecuencia an es convergente.
|qn+k − qn | < ε |qn | <
Tomando m = n + 1 en el resultado anterior se obtiene
Q
Corolario 14.6. Si
an es convergente (pero no nulo convergente) entonces lim an = 1.
Nota. Basados Q
en el resultado anterior es usual escribir los productos
Q infinitos en la forma (1 + an ) en donde la convergencia (no nula) de (1 + an )
implica lim an = 0.
♦
Q
P
El siguiente resultado establece la relación entre (1 + an ) y
an .
Q
Lema 14.7. Si an > 0 para todo n
Pentonces, (1+an ) es convergente (pero
no nulo convergente) si y solo si
an es convergente.
Prueba: Sean sn := a0 + a1 + · · · + an y pn := (1 + a0 )(1 + a1 ) · · · (1 + an ) las
sucesiones de sumas y productos parciales respectivamente. Es inmediato
de la definición de sn y pn y del hecho que los an son positivos que ambas
sucesiones (sn )n y (pn )n son crecientes. De este modo, para concluir el
resultado, basta mostrar que (sn )n es acotada si y solo si (pn )n es acotada.
Como por la definición de pn se tiene que sn < pn (¿porqué?) se concluye
que si (pn )n es acotada entonces (sn )n es acotada.
Como para todo x ∈ R se tiene que x + 1 ≤ ex sabemos que ak + 1 ≤ eak
para todo k ∈ N. Multiplicando sobre k = 0, 1, . . . , n tenemos que pn ≤ esn .
De este modo si (sn )n es acotada entonces (pn )n es acotada.
Corolario 14.8. Si an > 0 para todo n entonces,
P
X
Y
an ≤
(1 + an ) ≤ e an .
Ejemplo 14.9. Los productos infinitos
solo si p > 1.
Q
(1 + 1/np ) son convergentes si y
Dado que hemos encontrado una similitud entre productos infinitos y
series infinitas podemos definir
Q
Definición 14.10. El producto infinito
(1 + an ) es absolutamente conQ
vergente si el producto infinito (1 + |an |) es convergente.
200
14 Productos infinitos
Lema 14.11. La convergencia absoluta de
regular.
Q
(1+an ) implica la convergencia
Q
P
Nota. Como P(1 + an ) converge absolutamente se tiene que
|an | es convergente y ası́
an es convergente, pero como los aQ
n no son necesariamente
positivos, no podemos
concluir
la
convergencia
de
(1 + an ) a partir de la
P
convergencia de
an . Para probar este lema es mejor utilizar la condición
de Cauchy. Los detalles se dejan como Ejercicio 14.2 para el lector.
♦
Estamos listo para nuestro objetivo.
Teorema 14.12. Teorema de Euler para la función zeta de Riemann. Si pk es el k-ésimo número primo y s > 1 se tiene que
∞
∞
Y
X
1
1
=
.
ζ(s) =
s
n
1 − p−s
k
n=1
k=1
Además, dicho producto es absolutamente convergente.
Prueba: Como 0 < p−s
k < 1 tenemos las series geométricas
∞
X 1
1
=
,
pns
1 − p−s
k
n=0 k
∀ k = 1, 2, . . .
De este modo, los productos parciales de
Pm =
Q∞
−s
k=1 1/(1 − pk )
m Y
m X
∞
Y
1
1
=
=
−s
pns
1 − pk
k=1
k=1 n=0 k
k=1
m
Y
están dados por
1
1
1 + s + 2s + · · · ,
pk
pk
el producto de un número finito de series absolutamente convergentes. Dicho
producto se expande en una nueva serie la cual es también absolutamente
convergente. El truco radica en entender los términos de dicha serie.
Como 1 = p0k se tiene que cada término en esta nueva serie es un producto
de m términos de la forma
1
1
con ki ∈ {1, 2, . . . , m} y ai ∈ {0, 1, 2, . . . }.
a1 s
a1
am s =
m s
pk1 · · · pkm
(pk1 · · · pakm
)
m
Si denotamos con n = pak11 · · · pakm
tenemos que
X 1
,
Pm =
ns
(m)
P
donde la suma (m) a la derecha se toma solo sobre aquellos números n cuya
descomposición prima solo posee factores primos menores que o iguales a pm .
Recuerde que nuestro objetivo es mostrar que la sucesión de los Pm converge a ζ(s) por lo cual consideramos
ζ(s) − Pm =
∞
X
X 1
X 1
1
−
=
,
s
s
n
n
ns
n=1
(m)
[m]
14 Productos infinitos
201
P
donde la suma [m] a la derecha se toma solo sobre aquellos números n
cuya descomposición prima posee al menos un factor primo mayor que pm .
Como un número n cuya descomposición prima posee al menos un factor
primo mayor que pm debe de ser mayor que pm tenemos que
∞
X
1
|ζ(s) − Pm | ≤
,
ns
n>p
m
donde la serie de la derecha es convergente para s > 1. Al tomar m → ∞ se
concluye que Pm → ζ(s).
Por último, para mostrar que el producto converge absolutamente basta
notar que
∞
∞ ∞
Y
Y
Y
psk
1
1
=
=
1+ s
,
psk − 1
pk − 1
1 − p−s
k
k=1
k=1
y la serie
∞
X
k=1
k=1
∞
X
1
1
converge absolutamente al ser dominada por
.
s
pk − 1
ks
k=1
14.0.2. Ejercicios.
Ejercicio 14.1. Este ejercicio tiene poco que ver con productos infinitos
pero mucho que ver con la función zeta de Riemann. Si 0 < a ≤ 1 y s > 1
defina
∞
X
1
ζ(s, a) :=
.
(n + a)s
n=1
1. Muestre que dicha serie converge absolutamente para s > 1 y que
k
X
h
ζ s,
= k s ζ(s), para k = 1, 2, . . . .
k
h=1
2. Muestre que
∞
X
(−1)n−1
n=1
ns
= (1 − 21−s )ζ(s)
para s > 1.
Ejercicio 14.2. Demuestre el Lema 14.11.
Sugerencia: muestre por inducción sobre k que
|(1 + an+1 ) · · · (1 + an+k ) − 1| ≤ (1 + |an+1 |) · · · (1 + |an+k |) − 1.
n √
Ejercicio 14.3. Para
(absoluta) del
Q an = (−1) / n estudie la convergencia
P
producto infinito (1 + an ) y de la serie numérica
an . ¿Qué se concluye?
√
√
Ejercicio 14.4. Para a2n−1 = −1/ n y Q
a2n = 1/ n + 1/n estudie la
convergencia
(absoluta) del producto infinito (1+an ) y de la serie numérica
P
an . ¿Qué se concluye?
202
14 Productos infinitos
Ejercicio 14.5. Para an ≥ 0 muestreP
que el producto infinito
converge si y solo si la serie numérica
an converge.
Sugerencia: (1 + x)(1 − x) = 1 − x2 .
Q
(1 − an )
Ejercicio 14.6.
Muestre que si an > 0 para todo n entonces
la convergencia
P
Q
de la serie
an implica la convergencia del producto 1 + (−1)n an . Dé un
ejemplo para mostrar que el recı́proco no es cierto.
Ejercicio 14.7. Suponga que an ≥ 0 y que
a2n
a2n+2 < a2n+1 <
.
1 + a2n
Q
Muestre que
infinito (1+(−1)n an ) converge si y solo si la serie
P el producto
numérica (−1)n an converge.
P
Ejercicio 14.8. Suponga que tanto la serie convergente ∞
n=1 an como cada
unaQde sus sumas parciales sn no se anulan. Muestre
P∞ que el producto infinito
a1 ∞
(1
+
a
/s
)
converge
y
tiene
valor
n
n−1
n=2
n=1 an .
Q
n
Ejercicio 14.9. ¿Para qué valores de x el producto infinito ∞
n=1 cos(x/2 )
es convergente? En caso de convergencia calcule el valor del producto.
Ejercicio 14.10. Analice la convergencia de los siguientes productos infinitos.
∞
∞
∞
Y
Y
Y
2
1
n3 − 1
1.
1−
,
2.
1+ 2
,
3.
,
n(n + 1)
n −1
n3 + 1
n=2
4.
∞
Y
n=1
n=1
1+
1
,
n
2 −2
5.
∞
Y
n=2
n=2
1−
1
,
np
6.
∞
Y
n
1 + z2 ,
|z| < 1.
n=0
¿Para cuales de esos productos puede usted calcular el valor de convergencia?
Ejercicio 14.11. Este ejercicio generaliza la demostración del Teorema de
Euler para la función zeta de Riemann en el cual, f (n) = 1/ns .
1. Una sucesión (f (n))n se llama multiplicativa si f (1) = 1 y f (mn) =
f (m)f (n) para todo par de números m P
y n que sean primos relativos entre sı́.
Si (f (n))n es multiplicativa y la serie
f (n) es absolutamente convergente
muestre que
∞
∞
X
Y
f (n) =
(1 + f (pk ) + f (p2k ) + · · · )
n=1
k=1
donde pk es el k-ésimo número primo. Además, dicho producto es absolutamente convergente.
2. Una sucesión f (n)n se llama completamente multiplicativa si satisface f (1) = 1 y f (mn) = f (m)f (n) para todo par
P de números m y n. Si
(f (n))n es completamente multiplicativa y la serie
f (n) es absolutamente
convergente muestre que entonces
∞
∞
X
Y
1
f (n) =
.
1 − f (pk )
n=1
k=1
14 Productos infinitos
203
Ejercicio 14.12. Una forma diferente de estudiar los productos
infinitos
Q
de números positivos es la siguiente. Si como antes pn = nk=1 ak donde
suponemos que todo ak es mayor que cero, sabemos que la sucesión de los
(pn )n es convergente si y lo si la sucesión (ln pn )n es convergente gracias a
la continuidad de la función logaritmo. Además
ln pn = ln(a1 a2 · · · an ) = ln a1 + ln a2 + · · · + ln an = sn
P
donde sn es la n-ésima suma parcial de la serie numérica ln an . Analice las
ventajas
y desventajas de definir un producto infinito de números
Q∞
P∞ positivos
a
en
términos
de
la
convergencia
de
la
serie
numérica
n
n=1
n=1 ln an .
¿Qué relación guarda esta definición con la dada en las notas?
204
15 Productos infinitos
15. Bibliografı́a recomendada
Como es común en las áreas centrales de las matemáticas, la literatura
a nuestra disposición en esta área es más que abundante. Los siguientes,
son solo una muestra de aquellas fuentes que el estudiante puede visitar
para ampliar los temas que estudiamos en este curso. Como sugerencia, y
para bienestar de su propia formación, se le recomienda a los estudiantes
consultar tantas referencias como sea posible.
(1) Thomas M. Apostol, “Análisis Matemático”. Editorial Reverté,
España, 1976.
(2) Thomas M. Apostol, “Calculus”. Editorial Reverté, España, 1985.
(3) Robert G. Bartle, “Introducción al Análisis Matemático”. Editorial
Limusa, México, 1990.
(4) Robert G. Bartle y Donald R. Sherbert, “Introducción al Análisis
Matemático de una Variable”. Editorial Limusa, México, 1996.
(5) Eduardo Piza, “Introducción al Análisis Real en una Variable”. Editorial Universidad de Costa Rica, Costa Rica, 2003.
(6) Kenneth A. Ross,“Elementary Analysis: the theory of calculus”.
Springer-Verlag, Nueva York, 1980.
(7) Walter Rudin,“Principios de Análisis Matemático”. Editorial McGraw Hill, México, 1980.
(8) Michael Spivak, “Cálculo Infinitesimal”. Editorial Reverté, España,
1977.
(9) W. R Wade, “An Introduction to Analysis”. Third edition, Prentice
Hall, New Jersey, 2004.
Es importante que el estudiante se adiestre en el uso de las diferentes
herramientas del cálculo. Dicha habilidad solo se desarrolla practicando,
por lo cual sugerimos tomar de la biblioteca cualquier libro de cálculo, por
ejemplo
(10) R. E. Larson, R. P. Hostetler y B.H. Edwards, “Cálculo y Geometrı́a
Analı́tica”. Editorial McGraw Hill, España, 1995.
y resolverlo de principio a fin.
Si bien algunos de las referencias anteriormente citadas poseen capı́tulos
sobre la teorı́a sobre series e integrales de Fourier, es una buena idea revisar
los libros
(11) W. E. Boyce y R. C. DiPrima, “Ecuaciones Diferenciales y Problemas con Valores en Frontera”. Editorial Limusa, México, 1989.
(12) R. V. Churchill, “Fourier Series and Boundary Value Problems”.
Editorial McGraw Hill, New York, 1963.
(13) G. P. Tolstov, “Fourier Series”. Dover Publications Inc., New York,
1962.
205
Índice Alfabético
antiderivada, 55
aproximación mediante puntos medios,
84
área
de una región en coordenadas
polares, 75
encerrada por curvas, 71
cambio de variables, 55
coeficientes de Fourier, 177
compacto, 32
conjunto
abierto, 21
cerrado, 21
compacto, 22
constante de Napier, 12
contable, 40
continuidad
uniforme, 27
continuidad de la función lı́mite, 101
convergencia
absoluta, 146
absoluta de productos infinitos, 198
absoluta de series de funciones, 158
de productos infinitos, 196
de series de funciones, 158
en norma, 182
nula de productos infinitos, 196
puntual de sucesiones de funciones,
96, 97
uniforme de integrales impropias
dependientes de un parámetro, 130
uniforme de series de funciones, 158
uniforme de series de potencias, 163
uniforme de sucesiones de funciones,
98
convolución, 140
criterio
de continuidad uniforme, 28
de Abel para integrales impropias,
120
de Abel para series, 150
de Abel para series de funciones, 160
de Cauchy para convergencia
uniforme de series de funciones, 158
de Cauchy para integración de
Riemann, 36
de Cauchy para integrales impropias,
116
de Cauchy para integrales impropias
de segunda especie, 125
de Cauchy para productos infinitos,
197
de Cauchy para series numéricas, 144
de Cauchy para sucesiones de
funciones, 99
de comparación mediante lı́mite para
integrales impropias, 118
de comparación mediante lı́mite para
series numéricas, 146
de comparación para integrales
impropias, 117
de comparación para series
numéricas, 145
de condensación de Cauchy, 155
de Darboux, 47
de Dirichlet para integrales
impropias, 120
de Dirichlet para series, 149
de Dirichlet para series de funciones,
160
de la raı́z, 151
de la razón, 152
de Raabe, 154
de Riemann, 38
de Weierstrass, 134
M de Weierstrass, 159
otro criterio de la raı́z, 154
otro criterio de la razón, 154
para series alternantes, 149
cubrimiento
abierto, 22
por abiertos, 22
derivabilidad de la función lı́mite, 101
desigualdad
de Bessel, 184
de Cauchy-Schwartz, 49
triangular, 49
dominio de convergencia, 162
ecuaciones diferenciales, 81
expansión de Taylor, 164
extensión
continua, 29
periódica, 181
fenómeno de Gibbs, 190
forma integral de la serie de Fourier, 178
fórmula
de Stirling, 19
del binomio, 111
206
integral de Fourier, 192
integral general, 189
para el producto de integrales, 59
frontera, 25
función
contracción, 26, 30
de densidad de probabilidad, 76
de Dirichlet, 36
de Lipschitz, 26, 30
escalonada, 105
Gamma, 119
impar, 50
lı́mite, 96
lineal por partes, 106
par, 50
periódica, 31
Riemann integrable, 35
signo, 50, 57
zeta de Riemann, 196
identidad de Parseval, 186
independencia de los reordenamientos,
148
integrabilidad de la función lı́mite, 103
integración
mediante cambio de variable, 63
mediante fracciones parciales, 65
numérica, 83
por partes, 54, 62
otra versión, 59
por sustitución, 63
integral
de Darboux, 44, 45
de Lebesgue, 105
de Riemann-Stieltjes, 60
definida, 33
definida en el sentido de Riemann, 36
impropia, 115
impropia de primer especie, 115
impropia de segunda especie, 124
indefinida, 55, 61
inferior de Darboux, 45
inmediata a partir de derivadas, 61
superior de Darboux, 45
integrales
iteradas, 91
intervalo de convergencia, 162
lema
de Riemann-Lebesgue, 58
del cubrimiento de Borel, 23
lı́mite
inferior, 16
superior, 16
linealidad de la integral, 42
longitud
de arco, 73
de arco en forma paramétrica, 78
de curvas en el plano, 72
masa, 75
medias aritméticas, 154
modelo
de epidemia, 81
logı́stico, 81
norma superior, 98
núcleo de Dirichlet, 191
onda
cuadrada, 188
triangular, 188
partición, 33
más fina, 34
norma, 46
refinamiento, 34
trivial, 41
uniforme, 35, 72
polinomio
de Bernstein, 106
de Taylor, 164
probabilidad, 76
producto
de Cauchy de series, 155
de series, 149
interno de dos funciones, 69
parcial, 196
punto
de acumulación, 25
fijo, 26
frontera, 25
lı́mite, 21
radio de convergencia, 162
reales extendidos, 17
regla
de Simpson, 87
del trapezoide, 86
secuencialmente compacto, 25
serie
alternante, 149
armónica, 144
de Fourier, 177
de potencias, 162
geométrica, 143
207
numérica, 142
telescópica, 143
subsucesión, 9
sucesión, 6
acotada, 6
convergente, 7
creciente, 6
de Cauchy, 11
decreciente, 6
lı́mite, 7
monótona, 6
monótona de funciones, 100
por recurrencia, 6
uniformemente acotada, 97, 110
uniformemente convergente, 26
suma
de Riemann, 34
de Riemann asociada a la partición
uniforme, 35
de Riemann derecha, 34
de Riemann inferior, 35
de Riemann izquierda, 34
de Riemann superior, 34
inferior de Darboux, 44
parcial, 142
parcial de la serie de Fourier, 184
superior de Darboux, 44
sumabilidad de Česaro, 154
sumas de Riemann, 32
teorema
de Abel, 167
de aproximación de Bernstein, 106
de aproximación de Weierstrass, 108
de aproximación de Weierstrass
mediante polinomios
trigonométricos, 187
de Bernstein, 171
de Bolzano-Weierstras, 25
de Bolzano-Weierstrass, 10
de convergencia en norma para series
de Fourier, 186
de convergencia puntual de la integral
de Fourier, 194
de convergencia puntual de las series
de Fourier, 180
de convergencia uniforme de las series
de Fourier, 185
de Euler para la función zeta de
Riemann, 199
de Fejér, 191
de Heine-Borel, 23
de intersección de Cantor, 25
de localización de Riemann, 191
de Tauber, 167
de Taylor, 164
de Taylor con residuo integral, 55
del cambio de variable otra versión,
58
del punto fijo para contracciones, 26
fundamental del cálculo primera
versión, 53
fundamental del cálculo segunda
versión, 54
primer teorema del valor medio para
integrales, 51
segundo teorema del valor medio para
integrales, 51
transformada
coseno de Fourier, 192
de Laplace, 139
seno de Fourier, 192
unicidad de los coeficientes de las series
de potencias, 164
valor
esperado, 77
principal, 123, 130
promedio, 51
variable aleatoria, 76
variables separables, 81
velocidad de escape, 80
volumen
de un sólido de revolución, 74
208
Última actualización: January 5, 2012.
Escuela de Matemática, Universidad de Costa Rica Apartado 2060, San José
Costa Rica
E-mail address: [email protected]