Cálculo de la carga aplicada
Anuncio

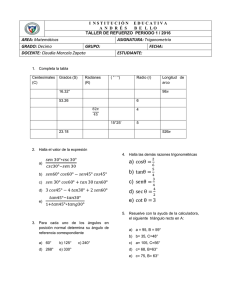
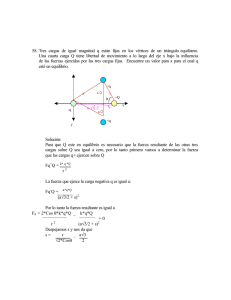
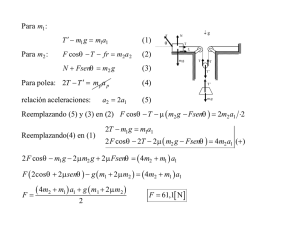
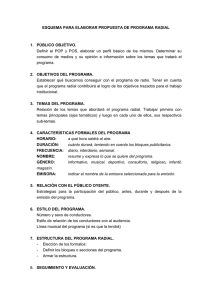
510ES Cálculo de la carga aplicada La guía LM puede recibir cargas y momentos en todas las direcciones que se generen debido a la orientación de montaje, alineación, posición del centro de gravedad de un objeto en desplazamiento, posición de empuje y resistencia de corte. Carga radial inversa Carga radial MA Carga lateral Carga lateral Momento en la dirección de paso MB Momento en la dirección de desvío MC Momento en la dirección basculante Fig.1 Direcciones de las cargas aplicadas en la guía LM Cálculo de una carga aplicada [Uso de eje simple] Equivalencia del momento Cuando el espacio de instalación para la guía LM es limitado, puede utilizar sólo un bloque LM o bloques LM dobles que establezcan un contacto cercano entre sí. En esa configuración, la distribución de la carga no es uniforme y, como resultado, se aplica un carga excesiva en áreas localizadas (es decir, en ambos extremos), como se muestra en Fig.2. El uso continuo bajo tales condiciones puede resultar en el descascarillamiento de esas áreas, lo que reduce consecuentemente la vida útil. En tal caso, calcule la carga real multiplicando el valor del momento por cualquiera de los factores de momentos equivalentes especificados en Tabla1 aTabla6 A1-43. Carga del momento Carga del momento Hilera de bolas sometida a carga Hilera de bolas sometida a carga Línea de desplazamiento de las bolas Deflexión máxima en las bolas Curva de distribución de la carga Carga máxima aplicada sobre una bola Raíl LM Línea de desplazamiento de las bolas Curva de distribución de la carga Fig.2 Carga de bola al aplicar un momento Se muestra, a continuación, una ecuación de carga equivalente cuando un momento actúa sobre una guía LM. P = K•M P K M : Carga equivalente por guía LM (N) : Factor de momento equivalente : Momento aplicado (N-mm) B1-56 510ES Punto de selección Cálculo de la carga aplicada Factor equivalente Factores equivalentes para el momento MA PR=KAR•MA Equivalente en la dirección radial PL=KAL•MA Equivalente en la dirección radial inversa Fig.3 Factores equivalentes para el momento MA Factores equivalentes para el momento MA Factor equivalente en la dirección radial KAR= C0 MA Factor equivalente en la dirección radial inversa KAL= C0L MA C0 C0L = =1 KAR•MA KAL•MA Factores equivalentes para el momento MB PT=KB•MB Equivalente en la dirección lateral PT=KB•MB Equivalente en la dirección lateral Fig.4 Factores equivalentes para el momento MB Factores equivalentes para el momento MB C0T Factor equivalente KB= en las direcciones laterales MB C0T =1 KB•MB B1-57 Guía LM Debido a que las cargas máximas admisibles son equivalentes al momento admisible, el factor equivalente, que debe multiplicarse al compensar los momentos MA, MB y MC según la carga aplicada por bloque, se obtiene dividiendo las cargas máximas admisibles en las direcciones correspondientes. Sin embargo, con aquellos tipos que no corresponden a los diseños de carga equivalente en las 4 direcciones, las capacidades de carga en las 4 direcciones difieren entre sí. Por lo tanto, los valores de factor equivalentes para los momentos MA y MC también difieren dependiendo de si la dirección es radial o radial inversa. 510ES Factores equivalentes para el momento MC PR=KCR•MC Equivalente en la dirección radial PL=KCL•MC Equivalente en la dirección radial inversa Fig.5 Factores equivalentes para el momento MC Factores equivalentes para el momento MC Factor equivalente en la dirección radial KCR= C0 MC Factor equivalente en la dirección radial inversa KCL= C0L MC C0 C0L = =1 KCR•MC KCL•MC C0 C0L C0T PR PL PT : : : : : : B1-58 Capacidad de carga estática básica (dirección radial) Capacidad de carga estática básica (dirección radial inversa) Capacidad de carga estática básica (dirección lateral) Carga calculada (dirección radial) Carga calculada (dirección radial inversa) Carga calculada (dirección lateral) (N) (N) (N) (N) (N) (N) 510ES Punto de selección Cálculo de la carga aplicada Ejemplo de cálculo Cuando se utiliza un bloque LM Descripción del modelo: SSR20XV1 N.°3 N.°4 N.°2 N.°1 Guía LM Aceleración gravitacional g=9,8 (m/s2) Masa m=10 (kg) ℓ1=200(mm) ℓ2=100(mm) ℓ1 ℓ2 m m Fig.6 Cuando se utiliza un bloque LM N.° 1 N.° 2 N.° 3 N.° 4 P1 = mg + KAR1 • mg • ℓ1 + KCR • mg • ℓ2 = 98 + 0,275 × 98 × 200 + 0,129 × 98 × 100 = 6752 (N) P2 = mg ‒ KAL1 • mg • ℓ1 + KCR • mg • ℓ2 = 98 ‒ 0,137 × 98 × 200 + 0,129 × 98 × 100 = ‒ 1323 (N) P3 = mg ‒ KAL1 • mg • ℓ1 ‒ KCL • mg • ℓ2 = 98 ‒ 0,137 × 98 × 200 ‒ 0,0644 × 98 × 100 = ‒ 3218 (N) P4 = mg + KAR1 • mg • ℓ1 ‒ KCL • mg • ℓ2 = 98 + 0,275 × 98 × 200 ‒ 0,0644 × 98 × 100 = 4857 (N) Cuando se utilizan dos bloques LM de manera que establezcan contacto entre sí N.º de modelo: SVS25R2 Aceleración gravitacional g=9,8 (m/s2) Masa m=5 (kg) ℓ1=200(mm) ℓ2=150(mm) N.°3 N.°4 N.°2 N.°1 ℓ1 ℓ2 m m Fig.7 Cuando se utilizan dos bloques LM de manera que establezcan contacto entre sí N.°1 P1 = mg 49 × 150 mg • ℓ2 49 + 0,0188 × 49 × 200 + 0,0814 × = 507,9 (N) + KAR2 • mg • ℓ1 + KCR • = 2 2 2 2 N.°2 P2 = mg 49 × 150 mg • ℓ2 49 – KAL2 • mg • ℓ1 + KCR • = – 0,0158 × 49 × 200 + 0,0814 × = 168,8 (N) 2 2 2 2 N.°3 P3 = 49 × 150 mg mg • ℓ2 49 – KAL2 • mg • ℓ1 – KCL • = – 0,0158 × 49 × 200 – 0,0684 × = – 381,7 (N) 2 2 2 2 N.°4 P4 = 49 × 150 mg mg • ℓ2 49 + KAR2 • mg • ℓ1 – KCL • = + 0,0188 × 49 × 200 – 0,0684 × = – 42,6 (N) 2 2 2 2 Nota1) Como una guía LM utilizada con una instalación vertical recibe sólo una carga de momento, no hay necesidad de aplicar una fuerza de carga (mg). B1-59 510ES [Uso del eje doble] Configuración de condiciones Configure las condiciones necesarias para calcular la carga aplicada del sistema LM y la vida útil en horas. Las condiciones consisten en los siguientes puntos: (1) Masa: m (kg) (2) Dirección de la carga de trabajo (3) Posición del punto de trabajo (por ej.: centro de gravedad): ℓ2, ℓ3, h1(mm) (4) Posición de empuje: ℓ4, h2(mm) (5) Disposición del sistema LM: ℓ0, ℓ1(mm) (N.º de unidades y ejes) (6) Diagrama de velocidad Velocidad: V (mm/s) Constante de tiempo: tn (s) Aceleración: n(mm/s2) V (αn = tn ) (7) Ciclo de servicio Cantidad de vaivenes por minuto: N1(min-1) (8) Longitud de la carrera: ℓs(mm) (9) Velocidad promedio: Vm(m/s) (10) Vida útil requerida en horas: Lh(h) Aceleración gravitacional g=9,8 (m/s2) ℓ3 Ciclo de servicio mg h2 h 1 ℓ0 Velocidad (mm/s) ℓ1 ℓ2 V tn ℓ4 Fig.8 Condición B1-60 t1 tn ℓS Diagrama de velocidad (s) (mm) 510ES Punto de selección Cálculo de la carga aplicada Ecuación de carga aplicada La carga aplicada a la guía LM varía de acuerdo con las fuerzas externas, como la posición del centro de gravedad de un objeto, la posición de empuje, la inercia generada por la aceleración o deceleración que ocurre durante el encendido y la parada, y la fuerza de corte. Al seleccionar una guía LM, es necesario obtener el valor de la carga aplicada teniendo en cuenta estas condiciones. V (αn = tn [Ejemplo] ) Condición Ecuación de carga aplicada Montaje horizontal (con el bloque en movimiento) Movimiento uniforme o reposo P3 ℓ2 mg ℓ0 ℓ3 2 P2 = mg mg•ℓ2 mg•ℓ3 – – 2•ℓ0 2•ℓ1 4 P3 = mg mg•ℓ2 mg•ℓ3 – + 2•ℓ0 2•ℓ1 4 P4 = mg mg•ℓ2 mg•ℓ3 + + 2•ℓ0 2•ℓ1 4 P1 = mg mg•ℓ2 mg•ℓ3 + + 4 2•ℓ0 2•ℓ1 P2 = mg mg•ℓ2 mg•ℓ3 – + 2•ℓ0 2•ℓ1 4 P3 = mg mg•ℓ2 mg•ℓ3 – – 2•ℓ0 2•ℓ1 4 P4 = mg mg•ℓ2 mg•ℓ3 + – 2•ℓ0 2•ℓ1 4 ℓ1 P1 Montaje horizontal, en saliente (con el bloque en movimiento) Movimiento uniforme o reposo mg mg•ℓ2 mg•ℓ3 + – 2•ℓ0 2•ℓ1 4 P2 P4 1 P1 = ℓ1 P3 P2 P4 P1 ℓ0 ℓ3 mg ℓ2 Nota) La carga es positiva si sigue la dirección de la flecha. B1-61 Guía LM Calcule la carga aplicada a la guía LM en cada uno de los ejemplos del 1 al 10 que se muestran a continuación. m : Masa (kg) ℓn : Distancia (mm) : Fuerza externa (N) Fn : Carga aplicada (dirección radial/radial inversa) (N) Pn (N) PnT : Carga aplicada (direcciones laterales) g : Aceleración gravitacional (m/s2) 2 (g =9,8 m/s ) V : Velocidad (m/s) : Constante de tiempo (s) tn : Aceleración (m/s2) n 510ES Condición Ecuación de carga aplicada Montaje vertical Movimiento uniforme o reposo ℓ2 P4 P1T 3 P2 = P3 = P1 ℓ0 mg•ℓ2 2•ℓ0 P1 = P4 = – mg mg•ℓ2 2•ℓ0 F mg•ℓ3 2•ℓ0 P1T = P4T = ℓ3 P2T = P3T = – P2 P2T mg•ℓ3 2•ℓ0 ℓ1 P. ej., el eje vertical de un robot industrial, una máquina de tratamiento de superficies automática, elevadores Montaje en pared Movimiento uniforme o reposo ℓ0 P2T ℓ3 ℓ2 P1T P2 ℓ1 P1 = P2 = – P3 = P4 = P1 mg•ℓ3 2•ℓ1 4 P1T = P4T = mg mg•ℓ2 + 4 2•ℓ0 P2T = P3T = mg mg•ℓ2 – 2•ℓ0 4 P3 P3T mg P4 P4T P. ej., el eje de recorrido de una cargadora con raíles transversales Nota) La carga es positiva si sigue la dirección de la flecha. B1-62 mg•ℓ3 2•ℓ1 510ES Punto de selección Cálculo de la carga aplicada Condición Ecuación de carga aplicada Con los raíles LM móviles Montaje horizontal P3 P1 5 P4 P1 a P4 (max) = mg mg•ℓ1 + 4 2•ℓ0 P1 a P4 (min) = mg – 4 ℓ0 Guía LM ℓ1 –ℓ1 P2 mg mg•ℓ1 2•ℓ0 ℓ2 P. ej., la horquilla deslizante de de una mesa XY Montaje con inclinación lateral P1 = + – P1T= P2 = + – P1 P3 P2T= 6 P2 ℓ3 ℓ1 θ P2T P3 = + ℓ0 + P3T= + P4T= mg•cosθ •ℓ3 mg•sinθ •h1 + 2•ℓ1 2•ℓ1 mg•cosθ mg•cosθ •ℓ2 – 2•ℓ0 4 mg•cosθ •ℓ3 mg•sinθ •h1 – 2•ℓ1 2•ℓ1 mg•sinθ mg•sinθ •ℓ2 – 2•ℓ0 4 P4 = + P. ej., el carro de un torno NC mg•cosθ mg•cosθ •ℓ2 – 2•ℓ0 4 mg•sinθ mg•sinθ •ℓ2 – 2•ℓ0 4 P1T ℓ2 mg•cosθ •ℓ3 mg•sinθ•h1 + 2•ℓ1 2•ℓ1 mg•sinθ mg•sinθ •ℓ2 + 2•ℓ0 4 h1 mg mg•cosθ mg•cosθ •ℓ2 + 2•ℓ0 4 mg•cosθ mg•cosθ •ℓ2 + 2•ℓ0 4 mg•cosθ •ℓ3 mg•sinθ •h1 – 2•ℓ1 2•ℓ1 mg•sinθ mg•sinθ •ℓ2 + 2•ℓ0 4 Nota) La carga es positiva si sigue la dirección de la flecha. B1-63 510ES Condición Ecuación de carga aplicada Montaje con inclinación longitudinal P1 = + – P1T = + P3 h1 P2 = + P2 mg P2T – P4 ℓ2 P1 7 P1T ℓ3 ℓ1 mg•cosθ mg•cosθ •ℓ2 + 2•ℓ0 4 mg•cosθ •ℓ3 mg•sinθ •h1 + 2•ℓ1 2•ℓ0 mg•sinθ •ℓ3 2•ℓ0 mg•cosθ mg•cosθ •ℓ2 – 2•ℓ0 4 mg•cosθ •ℓ3 mg•sinθ •h1 – 2•ℓ1 2•ℓ0 mg•sinθ •ℓ3 2•ℓ0 P2T = – ℓ0 θ P3 = + + mg•cosθ mg•cosθ •ℓ2 – 2•ℓ0 4 mg•cosθ •ℓ3 mg•sinθ •h1 – 2•ℓ1 2•ℓ0 mg•sinθ •ℓ3 2•ℓ0 P3T = – P4 = + P. ej., soporte de herramientas de un torno NC + P4T = + mg•cosθ mg•cosθ •ℓ2 + 2•ℓ0 4 mg•cosθ •ℓ3 mg•sinθ •h1 + 2•ℓ1 2•ℓ0 mg•sinθ •ℓ3 2•ℓ0 Durante la aceleración Montaje horizontal con inercia mg P1 = P4 = mg – 4 m•α 1•ℓ2 2•ℓ0 P2 = P3 = mg + 4 m•α 1•ℓ2 2•ℓ0 P1T = P4T = ℓ3 P1 ℓ2 P2T = P3T = – P3 P4 P3T ℓ0 Velocidad V (m/s) ℓ1 P4T P 1 a P4 = mg 4 Durante la deceleración V αn = tn t1 t2 t3 Tiempo (s) Diagrama de velocidad P. ej., un camión de transporte Nota) La carga es positiva si sigue la dirección de la flecha. B1-64 m•α 1•ℓ3 2•ℓ0 Durante el movimiento uniforme 8 F m•α 1•ℓ3 2•ℓ0 P1 = P4 = mg + 4 m•α 3•ℓ2 2•ℓ0 P2 = P3 = mg – 4 m•α 3•ℓ2 2•ℓ0 P1T = P4T = – P2T = P3T = m•α 3•ℓ3 2•ℓ0 m•α 3•ℓ3 2•ℓ0 510ES Punto de selección Cálculo de la carga aplicada Condición Montaje vertical con inercia Ecuación de carga aplicada P4 mg P1T ℓ0 P1 F ℓ3 P2 αn = P2T 9 V tn Velocidad V (m/s) ℓ1 t1 t2 t3 Tiempo (s) Diagrama de velocidad P. ej., vehículo de elevación Montaje horizontal con fuerza externa Guía LM Durante la aceleración m (g+α 1) ℓ2 P1 = P4 = – 2•ℓ0 m (g+α 1) ℓ2 P2 = P3 = 2•ℓ0 m (g+α 1) ℓ3 P1T = P4T = 2•ℓ0 m (g+α 1) ℓ3 P2T = P3T = – 2•ℓ0 ℓ2 Durante el movimiento uniforme mg•ℓ2 P1 = P4 = – 2•ℓ0 mg•ℓ2 P2 = P3 = 2•ℓ0 mg•ℓ3 P1T = P4T = 2•ℓ0 mg•ℓ3 P2T = P3T = – 2•ℓ0 Durante la deceleración m (g – α 3) ℓ2 P1 = P4 = – 2•ℓ0 m (g – α 3) ℓ2 P2 = P3 = 2•ℓ0 m (g – α 3) ℓ3 P1T = P4T = 2•ℓ0 m (g – α 3) ℓ3 P2T = P3T = – 2•ℓ0 Bajo acción de la fuerza F1 F1•ℓ5 2•ℓ0 F1•ℓ5 P2 = P3 = 2•ℓ0 F1•ℓ4 P1T = P4T = 2•ℓ0 F1•ℓ4 P2T = P3T = – 2•ℓ0 P1 = P4 = – ℓ2 ℓ4 P3 F2 ℓ5 F1 10 F ℓ1 F3 P3T P4 P4T ℓ3 ℓ0 P. ej., un taladro máquina fresadora, torno, centro de mecanizado y otras máquinas de corte Bajo acción de la fuerza F2 F2 F2•ℓ2 + 2•ℓ0 4 F2•ℓ2 F2 – P2 = P3 = 2•ℓ0 4 P1 = P4 = Bajo acción de la fuerza F3 F3•ℓ3 2•ℓ1 F3•ℓ3 P3 = P4 = – 2•ℓ1 F3•ℓ2 F3 P1T = P4T = – – 2•ℓ0 4 F3•ℓ2 F3 + P2T = P3T = – 2•ℓ0 4 P1 = P2 = Nota) La carga es positiva si sigue la dirección de la flecha. B1-65