Solución - IES Francisco Ayala
Anuncio

I.E.S. “CASTELAR” BADAJOZ
PRUEBA DE ACCESO (LOGSE)
UNIVERSIDAD DE MADRID
JUNIO – 2010 (GENERAL)
(RESUELTOS por Antonio Menguiano)
MATEMÁTICAS II
Tiempo máximo: 1 hora y 30 minutos
El alumno contestará a los cuatro ejercicios de una de las dos opciones (A o B)
que se le ofrecen. Nunca deberá contestar a unos ejercicios de una opción y a otros ejercicios de la otra opción. En cualquier caso, la calificación se hará sobre lo respondido a
una de las dos opciones. No se permite el uso de calculadoras gráficas.
OPCIÓN A
1º) Dada la función f (x ) =
x2 + 2
, se pide:
x2 +1
a ) Estudiar los intervalos de crecimiento y decrecimiento de f(x).
b ) Hallar los puntos de inflexión de la gráfica de f(x).
c ) Hallar las asíntotas y dibujar la gráfica de f(x).
d ) Hallar el área del recinto acotado que limitan las gráficas de f(x), el eje de abscisas y
las rectas y = x + 2 , x = 1 .
---------a)
Una función es creciente o decreciente cuando su derivada es positiva o negativa,
respectivamente, en los valores de su dominio, que es R.
f ' (x ) =
(
) (
)
2x · x2 +1 − x 2 + 2 · 2x
(x
2
)
+1
2
=
(
2x · x2 +1− x2 − 2
(x
2
)
+1
2
)=−
(x
2x
2
)
+1
2
.
Para x < 0 ⇒ f ' ( x ) > 0 ⇒ Creciente ⇒ (− ∞, 0 )
Para x > 0 ⇒ f ' ( x ) < 0 ⇒ Decreciente ⇒ (0, + ∞ )
b)
Una función tiene un punto de inflexión para los valores de su dominio que anuA. Menguiano
lan la segunda derivada, siendo distinta de cero la tercera derivada para los valores encontrados.
f ' ' (x ) = −
(
=
2
)
4
2
(
(x
(
2
)
+1
3
) = 0 ⇒ 3x
)
(
3
] = − 2 · (x + 1) − 8x
(x + 1)
2
2
2 3x 2 − 1
f ' ' (x ) = 0 ⇒
f ' ' ' (x ) =
[ (
(x + 1)
)
2 · x2 +1 − 2x · 2 · x2 +1 · 2x
)
(x + 1)
[
2
− 1 = 0 ;; x 2 =
(
)
2
12 x x 2 + 1 − 2 3 x 2 − 1 · 3 · x 2 + 1 · 2 x
(
6
2
2
2 x 2 + 2 − 8x 2
=−
3
(x
2
)
3
+1
=
(
(x
)
2 3x 2 − 1
2
)
+1
3
1
3
3
⇒ x1 = +
; ; x2 = −
3
3
3
] = 12 x (x
2
)
(
) = 12 x (− 2 x + 2) =
(x + 1)
+ 1 − 12 x 3 x 2 − 1
(x
2
)
+1
4
2
2
4
)
− 24 x x 2 − 1
(x
2
)
+1
4
( ) ≠ 0 ⇒ P. I . para x = −
f '' ±
3
3
1
+2
(
± ) +2 3
7
f (± ) =
=
=
(± ) + 1 1 + 1 4
3
3
3
3
3
3
2
2
3
3
y para +
3
3
3 7
3 7
⇒ P. I . ⇒ A −
, y B
, .
3 4
3 4
3
c)
Asíntotas horizontales: son los valores finitos que toma la función cuando x tiende a infinito; son de la forma y = k.
y=k =
lím
lím x 2 + 2
f (x ) =
= 1 ⇒ Asíntota horizontal : y = 1
x→∞
x → ∞ x2 +1
Asíntotas verticales: son los valores de x que anulan el denominador.
x 2 + 1 = 0 ; ; x ∉ R ⇒ No tiene.
Asíntotas oblicuas: son de la forma y = mx + n , siendo:
x2 + 2
lím f ( x )
lím x 2 + 1
lím x 2 + 2
m=
=
=
= 0 ⇒ No tiene asíntotas oblicuas
x→∞ x
x→∞ x
x → ∞ x3 + x
Teniendo en cuenta los datos obtenidos anteriormente y considerando que la función corta al eje Y en el punto C(0, 2).
Por cumplirse que f (− x ) =
(− x )2 + 2 = x 2 + 2 = f (x ) , la función es simétrica con res(− x )2 + 1 x 2 + 1
pecto al eje de ordenadas.
El recorrido de la función es R( f ) ⇒ (1, + ∞ ) .
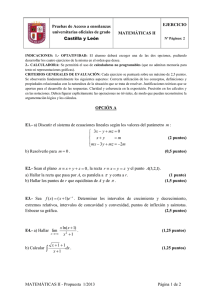
La representación gráfica, aproximada, es la siguiente:
Y
2 C(0, 2)
B
A
f(x)
y=1
-1
O
1
X
d)
El área del recinto limitado por las gráficas de f(x), el eje de abscisas y las rectas
y = x + 2 y x = 1 es la indicada en la figura.
Y
2
y=x+2
f(x)
y=1
x=1
S
-2
-1 y = 0
S=
O
x +2
x
∫ (x + 2) · dx + ∫ 2 · dx = ∫ (x + 2) · dx + ∫
0
0
−2
−2
2
x +1
0
0
−2
−2
1
X
+1+1
1
· dx = ∫ ( x + 2 ) · dx + ∫ 1 + 2 · dx =
2
x +1
x +1
−2
− 2
2
0
0
(− 2 )2
x2
1
= + 2 x + [x + arc tag x] 0 = 0 −
+ 2 · (− 2 ) + (1 + arc tag 1) − (0 + arc tag 0 ) =
2
−2
2
0
= −(2 − 4 ) + 1 +
π
4
− 0 − 0 = 2 +1+
π
4
=
12 + π 2
u ≅ 3'79 u 2
4
**********
x
2
2º) Dadas las rectas r ≡ =
y −1 z + 4
x y z
=
y s ≡ = = , se pide:
3
−1
1 1 4
a ) Determinar la ecuación de la recta perpendicular común a r y a s.
b ) Calcular la mínima distancia entre las rectas r y s.
---------a)
Para determinar la recta t, perpendicular común vamos a seguir el siguiente procedimiento, que además se ilustra con el gráfico adjunto:
r
A
vr
π1
t
π2
w
s
vs
B
1.- Determinamos los puntos A ∈ r y B ∈ s : A(0, 1, -4) y B(0, 0, 0).
2.- Hallamos unos vectores directores de las rectas: vr = (2, 3, − 1) y v s = (1, 1, 4) .
3.- Obtenemos un vector w , perpendicular a v r y v s :
i
j
k
w = vr ∧ vs = 2 3 − 1 = 12i − j + 2k − 3k + i − 8 j = 13i − 9 j − k ⇒ w = (13, − 9, − 1)
1 1 4
4.- Determinamos los planos π 1 y π 2 , de la forma siguiente:
(
)
x
π 1 A; vr , w ≡ 2
13
y −1 z + 4
3
−9
− 1 = 0 ; ; − 3 x − 13( y − 1) − 18( z + 4 ) − 39( z + 4 ) − 9 x + 2( y − 1) = 0 ; ;
−1
− 12 x − 11( y − 1) − 57( z + 4 ) = 0 ; ; − 12 x − 11 y + 11 − 57 z − 228 = 0 ; ; π 1 ≡ 12 x + 11 y + 57 z + 217 = 0
(
x
)
y
z
π 2 O; v s , w ≡ 1
1
4 = 0 ; ; − x + 52 y − 9 z − 13 z + 36 x + y = 0 ; ; π 2 ≡ 35 x + 53 y − 22 z = 0
13 − 9 − 1
La recta pedida t, es la que determinan los planos π 1 y π 2 en su intersección:
12 x + 11y + 57 z + 217 = 0
t≡
35 x + 53 y − 22 z = 0
b)
Se entiende como distancia entre dos rectas que se cruzan, a la menor distancia
entre ambas.
Para una mejor comprensión, hacemos un esquema de la situación.
r
A
vr
Pad z
h
lar la disvs
entre las
vamos a s
B
nar
un
pípedo cuyas dimensiones son los vectores directores de las rectas y el vector
ra calcutancia
rectas
determiparalelez.
z = BA = A − B = (0, 1, − 4) − (0, 0, 0) = (0, 1, − 4) .
El volumen del paralelepípedo es el producto mixto de los tres vectores. Por otra
parte, también se puede determinar el volumen como el producto del área de la base por
la altura. Observemos que la altura h es igual a la distancia pedida d entre ambas rectas.
Todo lo anterior se puede expresar de la siguiente forma:
(
)
V = vr · v s ∧ z = vr ∧ v s · h = v r ∧ v s · d ⇒ d =
d=
(
vr · vs ∧ z
vr ∧ v s
)
2 3
1 1
=
(
vr · v s ∧ z
)
vr ∧ v s
−1
4
0 1 −4
13, − 9, − 1
=
− 8 − 1 − 8 + 12
132 + (− 9 ) + (− 1)
2
2
=
**********
−5
169 + 81 + 1
=
5
≅ 0'32 unid . = d
251
x + ky − z = 0
3º) Dado el sistema homogéneo de ecuaciones: 2 x − y + 2 z = 0 , se pide:
x − 4 y + kz = 0
a ) Determinar para qué valores del parámetro k el sistema tiene soluciones distintas de
x = y = z =0.
b ) Resolverlo para el caso de k = 3.
---------a)
Cualquier sistema de ecuaciones lineales homogéneo es siempre compatible por
admitir la solución trivial x = y = z = 0.
Aplicando el Teorema de Rouché-Fröbenius, considerando que la matriz de coeficientes es la misma que la matriz ampliada, para que el sistema tenga otras soluciones,
además de la trivial, es necesario que sea compatible indeterminado, o sea: el determinante de la matriz de coeficientes tiene que ser 0, (para que el rango sea menor que el
número de incógnitas).
1
k
2 −1
1 −4
k=
−1
2 = 0 ; ; − k + 8 + 2k − 1 + 8 − 2k 2 = 0 ; ; 2k 2 − k − 15 = 0 .
k
1 ± 1 + 120 1 ± 121 1 ± 11
5
=
=
⇒ k1 = 3 ; ; k 2 = − .
4
4
4
2
Para k = 3 y k = −
5
el sistema tiene inf initas soluciones.
2
b)
x + 3 y − z = 0
Para k = 3 el sistema resulta 2 x − y + 2 z = 0 .
x − 4 y + 3z = 0
Despreciando una de las ecuaciones, por ejemplo la 3ª, y parametrizando una de
las incógnitas, por ejemplo z = λ, resulta:
x + 3y = λ x + 3y = λ
4
12
5
⇒ 7 y = 4λ ; ; y = λ ; ; x = λ − 3 y = λ − λ = − λ = y
x − 4 y = −3λ − x + 4 y = 3λ
7
7
7
x = − 75 λ
Solución : y = 74 λ ∀λ ∈ R
z = λ
**********
1
1
1 0
e I =
, se pide:
4º) Dadas las matrices A =
1 − 2
0 1
a ) Hallar dos constantes a y b, tales que A 2 = a · A + b · I .
b ) Sin calcular explícitamente A3 y A4, y utilizando sólo la expresión anterior, obtener
la matriz A5.
---------a)
1 1 1 1
1 1
1 0
·
= a ·
+ b ·
; ;
A 2 = a · A + b · I ⇒
1
−
2
1
−
2
1
−
2
0
1
a b 0 2 − 1 a + b
a
1+1 1− 2 a
a = −1
=
+
; ;
=
⇒
− 2a + b
a + b = 2 ⇒ b = 3
1 − 2 1 + 4 a − 2 a 0 b − 1 5 a
b)
2 − 1 2 − 1 1 1 4 + 1 − 2 − 5 1 1
·
·
=
·
=
A5 = A2 · A 2 · A =
− 1 5 − 1 5 1 − 2 − 2 − 5 1 + 25 1 − 2
5 + 14 − 2 19
5 − 7 1 1 5 − 7
= A5
·
=
=
=
− 7 26 1 − 2 − 7 + 26 − 7 − 52 19 − 59
**********
OPCIÓN B
x Lx
, si x > 0
1º) Dada la función: f (x ) = 2 x
, donde Lx significa logaritmo neperiano de
x + k , si x ≤ 0
x, se pide:
a ) Determinar el valor de k para que la función sea continua en R.
b ) Hallar los puntos de corte con los ejes de coordenadas.
c ) Obtener la ecuación de la recta tangente a la gráfica de la función en el punto de abscisa x = 1.
---------a)
La función f(x) es continua para todo R, excepto para el valor x = 0, que es dudosa su continuidad. Para que la función sea continua para x = 0 tiene que cumplirse que
los límites por la izquierda y por la derecha sean iguales, e iguales al valor de la función
en ese punto:
lím
lím
xL x
f (x ) =
= 0 (*)
−
x
x→0 2
x → 0
Para x = 0 ⇒
⇒ k =0
lím f ( x ) = lím ( x + k ) = k
x → 0+
x→0
(*)
lím
x →0
lím 1
lím
x L x 0 · (− ∞ )
x
0
0
·
=
⇒ In det . ⇒
=1·
= − ⇒ In det . ⇒
x
x
1
x →0 2 x →0 1
2
1
0
Lx
−∞
1
⇒ L' Hopital ⇒
2
2
2 x = − 1 · lím (L x ) = − 1 · lím (L x ) = − ∞ ⇒ In det . ⇒
1
x →0
2 x →0
2 x →0 1
∞
x
−1 ·
x
x
x
(L x )2
lím
1
2Lx ·
1 lím
x = 2 · lím L x = 2 · lím L x = − ∞ ⇒ In det . ⇒
⇒ L' Hopital ⇒ − ·
x → 0 − 12
x →0 1
2 x → 0 1 − 32
∞
− ·x
x
x
2
⇒ L' Hopital ⇒ 2 ·
lím
x →0
1
x
1
− ·x
2
3
−
2
= −4 ·
lím
x →0
1
x
1
−
2
= −4 ·
lím
x →0
x = −4 · 0 = 0
La función es continua en R para k = 0.
b)
x Lx
, si x > 0
.
La función resulta ser f (x ) = 2 x
x , si x ≤ 0
Teniendo en cuenta que para x = 0 es f(x) = 0, y que L1 = 0:
La función pasa por el origen de coordenadas y por el punto A(1, 0).
c)
Para x = 1 la función es f (x ) =
x Lx
y f(1) = 0, por lo que el punto de tangencia
2x
es A(1, 0). La pendiente es el valor de la derivada en ese punto:
y = f (x ) =
1
x Lx
1
y' 1
1
1
⇒ L y = L x + L (L x ) − x L 2 ; ;
=
+ x − L2 =
+
− L 2 ;;
x
2
2
y 2x L x
2x x L x
y' = f ' (x ) = y ·
m = f ' (1) =
L x + 2 − 2x L 2 L x
=
2x L x
x L x L x + 2 − 2x L 2 L x
x L x + 2 − 2x L 2 L x
·
= x ·
= f ' (x )
x
2
2x L x
2
2x
1 L1 + 2 − 2 · 1 · L 2 · L1 1 0 + 2 − 2 · 1 · L 2 · 0 1 2 1
·
= ·
= · = =m
21
2 ·1
2
2
2 2 2
La ecuación de una recta que pasa por un punto y conocida la pendiente es la siguiente: y − y0 = m(x − x0 ) .
y−0 =
1
· ( x − 1) ; ; 2 y = x − 1.
2
La recta tan gente para x = 1 es t ≡ x − 2 y − 1 = 0
**********
x + ay − z = a
2º) Dado el sistema de ecuaciones: ax + 2 z = −2 , se pide:
x + z = −2
a ) Discutirlo según los valores del parámetro α.
b ) Resolverlo en el caso de α = 0.
---------a)
Las matrices de coeficientes y ampliada son las siguientes:
1 a − 1
1 a −1 a
M = a 0 2 y M '= a 0 2 − 2 .
1 0 1
1 0 1 − 2
El rango de M en función de α es el siguiente:
1 a −1
M = a 0
1 0
a1 = 0
2 = 2a − a 2 = a(2 − a ) = 0 ⇒
a2 = 2
1
a ≠ 0
Para
⇒ Rango M = Rango M ' = 3 = n º incóg . ⇒ Compatible Deter min ado
a ≠ 2
Ahora vamos a estudiar el rango de M’ para los valores que anulan el determinante de M:
1 0 −1 0
1 −1 0
Para a = 0 ⇒ M ' = 0 0 2 − 2 equivalente a efectos del rango a M ' = 0 2 − 2
1 0 1 − 2
1 1 − 2
1 −1
0
M' = 0
2
− 2 = −4 + 2 + 2 = 0 ⇒ Rango M ' = 2
1
1
−2
Para a = 0 ⇒ Rango M = Rango M ' = 2 < n º incóg . ⇒ Compatible In det er min ado
1 2 −1 2
Para a = 2 ⇒ M ' = 2 0 2 − 2 ⇒ Rango M ' ⇒
1 0 1 − 2
1 2
2
⇒ {C1 , C 2 , C 4 } ⇒ 2 0 − 2 = −4 + 8 = −4 ≠ 0 ⇒ Rango M ' = 3
1 0 −2
Para a = 2 ⇒ Rango M = 2 ; ; Rango M ' = 3 ⇒ Incompatible
b)
x − z = 0
Resolvemos para el caso de α = 0. El sistema resulta ser 2 z = −2 , cuyas solu x + z = −2
ciones son x = 1, z = −1 .
x = 1
Solución : y = λ ∀λ ∈ R
z = −1
**********
3º) Dadas las rectas: r ≡ x =
x + z = 3
y −1 z +1
, se pide:
=
y s≡
2
−1
2 x − y = 2
a ) Hallar la ecuación del plano π determinado por las rectas r y s.
b ) Hallar la distancia desde el punto A(0, 1, -1) a la recta s.
---------a)
Para que las rectas r y s determinen al plano π es necesario que se corten o que
sean paralelas; para determinarlo obtenemos los vectores directores de las rectas.
Un vector director de r puede ser vr = (1, 2, − 1) .
Para encontrar un vector director de s consideramos que puede serlo el producto
vectorial de los vectores normales de los planos que la determinan, que son n1 = (1, 0, 1)
y n2 = (2, − 1, 0) :
i
j
k
vs = n1 ∧ n2 = 1 0 1 = 2 j − k + i = i + 2 j − k = (1, 2, − 1) = vs = vr .
2 −1 0
Las rectas r y s son paralelas.
Para determinar el plano π tenemos en cuenta que sus vectores directores pueden
ser los siguientes: uno de ellos el vector director de las rectas y el otro cualquier vector
w que tenga su origen en un punto de una de las rectas y su extremo en un punto de la
otra recta. Un punto de r es A(0, 1, -1) y un punto de s es B(0, -2, 3).
w = AB = B − A = (0, − 2, 3) − (0, 1, − 1) = (0, − 3, 4) .
Considerando uno de los puntos de las rectas, por ejemplo, A(0, 1, -1):
(
)
x
π A; v , w ≡ 1
0
y −1 z +1
2
−3
− 1 = 0 ; ; 8 x − 3( z + 1) − 3x − 4( y − 1) = 0 ; ; 5 x − 4 y + 4 − 3z − 3 = 0
4
π ≡ 5 x − 4 y − 3z + 1 = 0
b)
La distancia de un punto P a una recta r viene dada por la siguiente fórmula:
d (P , r ) =
QP ∧ v
v
, siendo Q un punto de la recta r y v un vector director de la recta r.
Aplicando la fórmula a la recta s y al punto A(0, 1, -1) y conociendo el vector director de s, que es vs = (1, 2, − 1) y un punto de s, que es B(0, -2, 3).
w = AB = B − A = (0, − 2, 3) − (0, 1, − 1) = (0, − 3, 4)
i
d ( A, s ) =
=
AB ∧ v s
vs
=
j
k
0 −3
4
1
−1
2
12 + 2 2 + (− 1)
2
=
3i + 4 j + 3k − 8i
1+ 4 +1
25 + 16 + 9
50
50
25
=
=
=
unidades = d ( A, s )
6
3
6
6
**********
=
− 5i + 4 j + 3k
6
=
(− 5)2 + 4 2 + 32
5
=
4º) Sea π el plano que contiene a los puntos P(1, 0, 0), Q(0, 2, 0) y R(0, 0, 3), se pide:
a ) Hallar el volumen del tetraedro determinado por el origen de coordenadas y los puntos P, Q y R.
b ) Calcular las coordenadas del punto simétrico del origen de coordenadas respecto del
plano π.
---------El volumen del tetraedro es, en valor absoluto, un sexto del volumen del paralelepípedo cuyas dimensiones determinan los tres vectores
Los vectores que determinan los cuatro puntos son los siguientes:
u = OP = (1, 0, 0) ; ; v = OQ = (0, 2, 0) ; ; w = OR = (0, 0, 3)
El volumen del tetraedro es un sexto del producto mixto de los tres vectores que
determinan sus dimensiones:
VOPQR
[ (
1
=
u · v∧w
6
)]
1 0 0
1
1
= · 0 2 0 = · 6 = 1 u 3 = VOPQR
6
6
0 0 3
b)
El plano π que contiene a los puntos P, Q y R puede determinarse por cualquiera
de los puntos y dos de los vectores que determinan.
α = PQ = Q − P = (0, 2, 0) − (1, 0, 0) = (− 1, 2, 0) .
β = PR = R − P = (0, 0, 3) − (1, 0, 0) = (− 1, 0, 3) .
(
)
x −1 y
π P; α , β ≡ − 1
−1
z
2 0 = 0 ; ; 6( x − 1) + 2 z + 3 y = 0 ⇒ π ≡ 6 x + 3 y + 2 z − 6 = 0 .
0 3
Un vector normal al plano π es: n = (6, 3, 2) .
x = 6λ
La recta r que pasa por el punto O y es perpendicular al plano π es: r ≡ y = 3λ
z = 2λ
El punto M, intersección del plano π con la recta r, tiene que satisfacer las ecuaciones de ambos, por lo tanto:
π ≡ 6 x + 3 y + 2 z − 6 = 0
6
⇒ 36λ + 9λ + 4λ − 6 = 0 ; ; 49λ = 6 ; ; λ =
49
x = 6λ
r ≡ y = 3λ
z = 2λ
M ( 36
49 ,
18
49
,
12
49
)
6 36
=
49 49
6 18
36 18 12
y=3·
= ⇒ M ,
,
49 49
49 49 49
6 12
z=2·
=
49 49
x=6·
π
O
M’(x, y, z)
Para que M’ sea el punto simétrico de M
con respecto a π , tiene que cumplirse que:
r
MO = OM ' ⇒ O − M = M '−O ; ; (0, 0, 0 ) − ( 36
49 ,
(− 3649 ,
18
49
,
12
49
) = (x, y, z ) − (0, 0, 0) ; ;
36
18
12
12
− 18
49 , − 49 ) = ( x, y, z ) ⇒ M ' (− 49 , − 49 , − 49 )
**********