Análisis numérico de sistemas no lineales
Anuncio

Análisis numérico
de sistemas no lineales
Índice
1. Introducción.
2. El 2o método de Lyapunov.
3. El 1er método de Lyapunov.
4. Teorı́a de catástrofes.
5. Teorı́a de singularidades.
6. Métodos de continuación.
7. Bifurcaciones locales de puntos de equilibrio.
8. Ciclos lı́mite.
9. Perturbación, promediado y perturbación singular.
10. Bifurcaciones locales de sistemas en tiempo discreto.
11. Caos determinista.
12. Sistemas hamiltonianos.
Introducción
Una gran parte de la actividad ingenieril consiste en observar la evolución de las cosas a lo
largo del tiempo. Matemáticamente, se estudian sistemas dinámicos.
3
Introducción
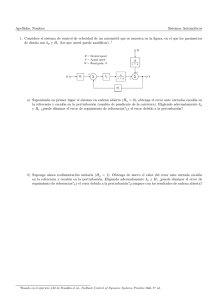
Por ejemplo, sea el circuito
descrito por la ecuación diferencial:
RC
dV
+V = E
dt
V (0) = V0
4
Introducción
Alternativamente, el comportamiento del circuito se puede describir mediante la solución
de la ecuación diferencial:
t
− RC
V (t) = E + (V0 − E)e
5
Introducción
O sea una cuenta bancaria
ptas(k + 1) = (1 + r)ptas(k)
ptas(0) = ptas0
6
Introducción
Una forma alternativa de expresar este sistema
es por su solución:
ptas(k) = (1 + r)k ptas0
7
Introducción
La solución es lo importante Se deine un
sistema dinámico como una aplicación Φ
Φ
X ×I →X
con
• X algún conjunto.
• I un conjunto dotado de un orden completo
(normalmente < o Z): el tiempo.
8
Introducción
Por ejemplo:
• En el circuito, X = < e I = <. Φ(x, t) =
t ).
E + (x − E) exp(− RC
• En el banco, X = < e I = Z +. Φ(x, t) =
(1 + r)tx.
9
Introducción
Diferentes selecciones de X e I conducen a
diferentes tipos de sistemas dinámicos:
• X = <n e I ∈ <: sistemas diferenciales.
• X = <n e I ∈ Z: sistemas en diferencias.
• X una variedad algebraica de <n e I ∈ <:
sistemas algebraicos-diferenciales.
• X ∈ N e I ∈ Z: autómatas celulares.
• X ∈ C k e I ∈ <: algunas ecuaciones en
derivadas parciales.
• ...
10
Introducción
Dos términos muy usados:
• Φ se llama el flujo.
• Una función particular de I a X definida
por Φ(x0, t), para un x0 concreto, se llama
la trayectoria u órbita de x0.
11
Introducción
La definición que hemos dado supone que los
sistemas estudiados son independientes del tiempo. En el caso más general se tiene un flujo
Φ(x, t, t0). El caso independiente del tiempo
corresponde a
Φ(x, t, t0) = Φ(x, t − t0)
12
Introducción
La anterior restricción no es seria, en el sentido de que se puede suspender un sistema
dependiente del tiempo en uno independiente
añadiendo la ecuación de estado
dt
=1
dt
13
Introducción
Supongamos que existe un x∗ que verifica:
Φ(x∗, t) = x∗ ∀t ∈ I
es un punto de equilibrio del sistema.
14
Introducción
Es posible dar otras caracterizaciones de los
puntos de equilibrio para tipos de sistemas dinámicos
particulares. Por ejemplo:
• Sistemas diferenciales ẋ = f (x, t): f (x∗, t) =
0.
• Sistemas en diferencias xk+1 = f (xk , k):
f (x∗, k) = x∗
15
Introducción
Una trayectoria que una dos puntos de equilibrio se llama una órbita heteroclı́nica. Una
órbita que una un punto de equilibrio consigo
mismo se llama una órbita homoclı́nica.
16
Introducción
Por ejemplo, consideremos el modelo de crecimiento de algas en un pantano:
ut = uxx + ζu(1 − u)
Esta ecuación tiene dos soluciones estacionarias
u = 0, 1
17
Introducción
Supongamos que buscamos una solución en
forma de onda:
u(x, t) = U (x − ct)
Substituyendo en la EDP
Ü + cU̇ + ζU (1 − U ) = 0
18
Introducción
La ecuación anterior es una ecuación diferencial con dos puntos de equilibrio
(U, U̇ ) = (0, 0), (1, 0)
El retrato de fases es
Las órbitas heteroclı́nicas representan ondas
que transforman un estado en otro.
19
Introducción
Desde un punto de vista más general, se llaman
conjuntos invariantes a aquellos conjuntos S ∈
X que verifican:
Φ(S, t) = S
20
Introducción
Si S es una trayectoria periódica que no es un
punto de equilibrio, es un ciclo lı́mite.
21
Introducción
Por ejemplo, consideremos el oscilador de van
der Pol
dvc
= −20il
dt
dil
1 3
= 0.05(vc − ( il − il ))
dt
3
22
Introducción
El retrato de fase es
23
Introducción
Si se dota a X de una noción de proximidad, es
decir, de una topologı́a, se pueden hacer cosas
interesantes.
24
Introducción
Se supone que se tiene una distancia (una métrica)
sobre X. Se recuerdan las siguientes definiciones:
• Una -bola de un punto x0 ∈ X es el conjunto de puntos x que verifican d(x, x0) < .
• Un conjunto abierto es un conjunto que no
contiene su frontera (más o menos).
• Un entorno de x0 es un abierto que contiene una bola de x0.
• Un entorno de un conjunto es un abierto
que contiene a una bola de cada uno de los
puntos que lo forman.
25
Introducción
Decimos que un conjunto invariante S es un
atractor cuando
• Existe algun entorno V de S tal que todas
las trayectorias Φ(x, t) que comienzan en V
permanecen en V ∀t > t0.
• Dado un punto x0 ∈ S con una -bola B,
cualquiera de las trayectorias anteriores pasa
infinitas veces por B.
26
Introducción
El dominio de atracción es el conjunto de
puntos x ∈ X que tienden al atractor.
27
Introducción
Sea S un conjunto invariante.
(manifold) estable local de S es
La variedad
s (S) = {x ∈ V | Φ(x, t) → S si t → ∞,
Wloc
Φ(x, t) ∈ V ∀t > 0}
siendo V un entorno de S.
El inestable es
u (S) = {x ∈ V | Φ(x, t) → S si t → −∞,
Wloc
Φ(x, t) ∈ V ∀t < 0}
28
Introducción
Las veriedades estables e inestables globales se
obtienen como
s (S), t)
W s(S) = ∪t≤0Φ(Wloc
u (S), t)
W u(S) = ∪t≥0Φ(Wloc
29
Introducción
En el caso de un sistema diferencial lineal ẋ =
Ax las variedades W s y W u del origen son los
subespacios E s y E u generados por los autovalores con parte real negativa y positiva respectivamente.
30
Introducción
En el caso de un sistema en diferencias lineal
xk+1 = Axk las variedades W s y W u del origen
son los subespacios E s y E u generados por los
autovalores con módulo mayor y menor que 1
respectivamente.
31
Introducción
Consideremos un sistema diferencial no lineal
ẋ = f (x). Sea x∗ un punto de equilibrio. Sea
∆x = x − x∗. El sistema linealizado es
∆ẋ = fx∆x
32
Introducción
Se demuestra que los subespacios E s y E u del
sistema linealizado son tangentes en el punto
de equilibrio a las variedades W s y W u del sistema sin linealizar.
33
Introducción
Si el sistema linealizado tiene autovalores de
parte real nula y su subespacio asociado E c,
nada puede decirse de la dinámica de la estabilidad de la dinámica en variedades tangentes
a este subespacio. Por ejemplo,
ẋ = ±x2
ẏ = −1
34
Introducción
Los mismos resultados son válidos para sistemas en diferencias en vez de diferenciales.
35
Introducción
Consideremos ahora dos flujos Φ1 y Φ2 sobre el mismo espacio X. Nos gustarı́a saber
cuando los dos flujos son cualitativamente iguales: conjugados.
36
Introducción
Dos flujos son conjugados cuando existe una
biyección continua (un homeomorfismo) y una
función estrictamente creciente t2 = T (t1) que
hacen conmutativo el diagrama:
X
↓h
X
Φ1 (.,t1 )
→
Φ2 (.,t2 )
→
X
↓h
X
37
Introducción
Dos sistemas lineales ẋ = A1x y ẋ = A2x son
conjugados si A1 y A2 tienen el mismo número
de autovalores con la parte real negativa y el
mismo de autovalores con la parte real positiva.
38
Introducción
Considérese el sistema en <2
ẋ = Ax
donde A tiene dos valores reales distintos λ1
y λ2. Es sabido entonces que A admite una
factorización:
A = V −1
"
λ1 0
0 λ2
#
V = V −1ΛV
39
Introducción
El sistema ẋ1 = Ax1 es conjugado con ẋ2 =
Λx2 sin más que considerar como función T la
identidad ( t1 = t2 ) y como homeomorfismo
h la aplicación lineal x2 = V x1
40
Introducción
Ahora, si se supone que λ1,2 < 0 el sistema 2
es conjugado con
"
ẋ3 =
1
−λ
λ2
0
0
−1
#
x3
sin más que considerar como homeomorfismo
la identidad y como función T la función monótona creciente t2 = − λ1 t1.
2
41
Introducción
1
Defı́nase α = λ
λ2 . El flujo del sistema 3 es una
función lineal dada por la matriz de transición
"
x3(t) = Φ3(t)x3(0) =
exp(−αt)
0
0
exp(−t)
42
#
x3(0)
Introducción
Considerese ahora el sistema 4 dado por ẋ4 =
−I x4, donde I es la matriz identidad. Su flujo
viene dado por
x4(t) = Φ4(t)x4(0) = exp(−t)x4(0)
Entonces, los sistemas 3 y 4 son conjugados
si se consideran como función T la identidad y
como homeomorfismo h:
"
h(x) =
signo(x(1)) | x(1) |α
#
x(2)
43
Introducción
En efecto, es fácil comprobar que
(Φ3 ◦ h)(x) = (h ◦ Φ4)(x)
donde ◦ indica la composición de funciones.
Nótese que h es continúa en el origen si y solo
si α > 0, por lo que si α < 0 no es ni siquiera
un homemorfismo.
44
Introducción
Considérese ahora un quinto sistema definido
por
"
ẋ5 =
−1 1
−1 −1
#
x5
Su flujo viene ahora dado por:
x5(t) = Φ5(t)x5(0)
"
#
cos(t) sin(t)
= exp(−t)
x5(0)
− sin(t) cos(t)
45
Introducción
Es fácil ahora comprobar que el homeomorfismo dado por:
"
h(x) =
cos(ln || x ||) sin(ln || x ||)
− sin(ln || x ||) cos(ln || x ||)
#"
x(1)
x(2)
#
verifica
(Φ4 ◦ h)(x) = (h ◦ Φ5)(x)
Nótese que h tiene una discontinuidad evitable
en el origen, y no es allı́ diferenciable.
46
Introducción
Puede procederse de manera análoga para comprobar que Φ5 es conjugado a todos los sistemas lineales oscilatorios con autovalores de
parte real negativa.
47
Introducción
Consideremos ahora un conjunto de objetos Oλ
dependientes de forma continua de parámetros
λ, que viven en algún espacio topológico. Supongamos que existe también una relación de
equivalencia R entre los objetos O. Si para un
valor λ0 existe un vecindad V, tal que todos los
Oλ para λ ∈ V tienen la relación R con Oλ0 , se
dice que Oλ0 no es una bifurcación.
48
Introducción
Dos casos importantes
• O son flujos dependientes de parámetros
Φλ(x, t) y R es la relación de conjugación.
• O son sistemas de ecuaciones no lineales
fλ(x) = 0 y R es el tener el mismo número
de soluciones.
49
Introducción
Consideremos un determinado diagrama de difurcación. Si el diagrama permanece cualitativamente igual para pequeñas variaciones en
el modelo (es decir, substituir, p. ej., Φλ(x, t)
por Φλ(x, t) + δΦλ(x, t)) se dice que el modelo
es estructuralmente estable.
50
Introducción
Por ejemplo, consideremos el modelo de este
sistema fı́sico
51
Introducción
El hamiltoniano del sistema es:
1
1 2
K(l − l0)2 +
pθ
2
2I
h
1
=
K (L2 + (L + l0 − d)2−
2
H =
2L(L + l0 −
1
d) cos θ) 2
− l0
2
1 2
pθ
2I
= Hd(θ, pθ )
+
Y las ecuaciones del movimiento
dθ
∂H
=
dt
∂pθ
dpθ
∂H
= −
dt
∂θ
52
Introducción
Centrémonos en los puntos de equilibrio
∂H
∂pθ
∂H
0 = −
∂θ
0 =
De la primera ecuación se sigue
p∗θ = 0
Substituyendo en la segunda
1 K(l − l )2
d2
dU
0
=
=0
dθ
dθ
53
Introducción
Haciendo la derivada
dl
dθ
dl dl2
= K(l − l0) 2
dl dθ
1
= K(l − l0) 2L(L + l0 − d) sin θ
2l
0 = K(l − l0)
Hay dos soluciones
θ = 0
l(θ) = l0
54
Introducción
De la segunda solución se obtiene
2 = L2 + (L + l − d)2 − 2L(L + l − d) cos θ
l0
0
0
Luego
2
(L + l0 − d)2 + L2 − l0
cos θ =
2L(L + l0 − d)
Por supuesto, | cos θ |≤ 1. Es fácil comprobar
que para d = 0 , cos θ = 1. Si d > 0, cos θ < 1,
y si d < 0, cos θ > 1.
55
Introducción
En resumen:
• Si d > 0 existen tres soluciones: θ = 0 y
las dos dadas por cos θ = . . ..
• Si d < 0 sólo hay una solución: θ = 0.
56
Introducción
Toda esta información la podemos resumir en
el diagrama de bifurcación:
57
Introducción
Supongamos que consideramos el peso de la
barra M g. El hamiltoniano será ahora:
1
1 2
1
2
p
H = (l − l0) + M gL sin θ +
2
2
2I θ
y procedamos como antes.
58
Introducción
El diagrama de bifurcación es ahora
Ası́ pues, el problema original no tenı́a estabilidad estructural.
59
El 2o método de Lyapunov
Sea un sistema diferencial
ẋ = f (x)
Supongamos que existe una función escalar
V (x) que verifica
• V está inferiormente acotada: V > V0.
• Si x0 no es un punto de equilibrio, dV
dt (x0 ) <
0.
Entonces V es una función de Lyapunov.
60
El 2o método de Lyapunov
Si un sistema tiene una función de Lyapunov,
entonces no tiene más atractores que puntos
de equilibrio.
En efecto, la variación de V se puede escribir
dV
dt
=
X ∂V dxi
i ∂ xi dt
= ∇V.f
Por tanto, es un punto de equilibrio dV
dt = 0,
y en un punto de no equilibrio dV
dt < 0. No
puede haber ciclos lı́mites, porque si x1 y x2
son dos puntos del ciclo, se tendrı́a V (x1) >
V (x2) > V (x1). Tampoco puede haber toros
invariantes o otros atractores por parecidas razones.
61
El 2o método de Lyapunov
Por ejemplo, consideremos el sistema
ẋ1 = −2x1 − x2
2
ẋ2 = −x2 − x1x2
Y escojamos
2
V = x2
1 + x2 ≥ 0
62
El 2o método de Lyapunov
Es fácil comprobar que
2
V̇ = −4x2
1 − 2x2 ≤ 0
V̇ = 0 si y solo si x1 = x2 = 0. Ası́ pues el
único atractor del sistema es el origen.
Por otra parte, V tiende a ∞ cuando | x |→
∞. Por tanto, todas la órbitas permanecen
acotadas, y el origen es un atractor global.
63
El 2o método de Lyapunov
Por esto a veces se exige además que V → ∞
cuando | x |→ ∞, para asegurar convergencia
a algún punto de equilibrio.
64
El 2o método de Lyapunov
Aunque los sistemas que tienen funciones de
Lyapunov son limitados, existen unos cuantos
en que han de existir por razones fı́sicas. Por
ejemplo . . .
65
El 2o método de Lyapunov
Sistemas de gradiente
ẋ = −∇V (x)
Se tiene
dV
dt
= ẋT ∇V (x)
= −(∇V )2
< 0
66
El 2o método de Lyapunov
Sistemas hamiltonianos con rozamiento
∂H
∂pi
∂F
∂H
−
p˙i = −
∂qi
∂pi
q˙i =
siendo F la función de disipación. Es fácil comprobar que
X ∂F ∂H
dH
=−
dt
i ∂pi ∂pi
Se puede comprobar que el segundo término
es negativo, pues F se opone al movimiento,
luego H es una función de Lyapunov.
67
El 2o método de Lyapunov
Consideremos un péndulo no lineal
1 2
H(θ, pθ ) =
pθ − mgl cos θ
2I
1 2
Dp
F =
2 θ
Luego
dH
D
= − p2
θ <0
dt
I
68
El 2o método de Lyapunov
Estas mismas ideas se pueden aplicar a sistemas en diferencias xk+1 = f (xk ). Entonces
V (x) es función de Lyapunov si
• V está inferiormente acotada.
• V (xk+1) < V (xk ) si xk no es punto de equilibrio.
69
El 2o método de Lyapunov
Por ejemplo, f puede ser un algoritmo de optimización, xk el valor de las variables en cada
iteración, y V la función objetivo.
70
El 2o método de Lyapunov
En general, la teorı́a de Lyapunov se aplica relajando alguna de las condiciones; o añadiendo
condiciones nuevas (como todas las cosas relevantes, es una idea, no una receta). Por ejemplo, supongamos que encontramos un punto
de equilibrio x∗, una función V , y un dominio
D que verifican:
• V , inferiormente acotada, tiene un mı́nimo
en D para x = x∗.
• Dentro de D \ x∗, se cumple dV
dt < 0.
• La frontera de lal dominio ∂D coincide con
alguna curva de nivel de V .
Entonces D ∈ el dominio de atracción de x∗
71
El 2o método de Lyapunov
Consideremos de nuevo el oscilador de van der
Pol
dvc
= −20il
dt
1
dil
= 0.05(vc − ( i3
l − il ))
dt
3
Sabemos que este sistema tiene en el origen
un foco inestable y un ciclo lı́mite estable.
72
El 2o método de Lyapunov
Si cambio t por −t el foco inestable se convierte en estable. Su dominio de atracción es
ahora un ciclo lı́mite inestable. Consideremos
ese sistema:
dvc
= 20il
dt
dil
1 3
= −0.05(vc − ( il − il ))
dt
3
73
El 2o método de Lyapunov
Consideremos la función de Lyapunov
V = vc2 + 400i2
l
Se comprueba que
dV
1 2
2
= 800il ( il − 1)
dt
3
Ası́ pues
dV
< 0 si i2
l <3
dt
74
El 2o método de Lyapunov
Si se escoge
V = vc2 + 400i2
l < 1200
se cumple la desigualdad del dominio anterior. Por lo tanto, el dominio D dado por esta
curva de nivel debe pertenecer al dominio de
atracción del origen. Como el dominio real esta
definido por el ciclo lı́mite, este debe estar por
fuera de esa elipse.
75
El 2o método de Lyapunov
De hecho . . .
76
El 2o método de Lyapunov
El punto importante es que la utilización de
funciones de Lyapunov permite estimar, aunque
de forma conservativa, dominios de atracción.
Este hecho se ha empleado en, entre otras
cosas, el estudio de la estabilidad trasitoria de
sistemas eléctricos.
77
El 2o método de Lyapunov
Tenemos un sistema eléctrico que sufre una
perturbación (un corto, p. ej.). Después del
mismo se encuentra en un punto que no es
el punto de equilibrio deseado, que suponemos
estable. La pregunta es: ’ ? Podrá o no alcanzar este punto?.
78
El 2o método de Lyapunov
Modelamos el sistema eléctrico por las ecuaciones:
X
d2δi
dδi
Mi 2 + Di
= Pi −
Cij sin(δi − δj )
dt
dt
j6=i
i = 1, n Cij simetrica
Introducimos la variable pi = Miδ˙i y las funciones
"
H =
X
i
1 2
p −
2Mi i
Piδi −
F =
X1
X Di
i 2Mi
j 2
Cij cos(δi − δj )
p2
i
79
El 2o método de Lyapunov
Las ecuaciones del movimiento quedan en forma
cuasi-hamiltoniana:
∂H
∂pi
∂H
∂F
p˙i = −
−
∂δi
∂pi
δ˙i =
Por tanto
X ∂H ∂F
dH
=−
<0
dt
i ∂pi ∂pi
Por tanto, H es una función de Lyapunov.
80
El 2o método de Lyapunov
Supongamos que se desea saber el dominio de
atracción de un punto de equilibrio (δi, pi) =
(δi∗, 0). Para determinar la frontera del dominio
buscamos donde Ḣ = 0. Pero
X ∂H ∂F
dH
0=
= −
dt
i ∂pi ∂pi
⇒ pi = 0
⇒ δ˙i = 0
Ası́, Ḣ = 0 sólo en alguno de los restantes
puntos de equilibrio.
81
El 2o método de Lyapunov
Llamemos al resto de puntos de equilibrio (δis1, 0),
sj
. . ., (δi , 0), . . .. Sea H ∗ y H j el valor del hamiltoniano en cada punto. Nos interesa la curva
de nivel H = H j tal que
• El dominio encerrado por H = H j y que
pase por el punto de equilibrio j contenga
al punto de equilibrio ∗.
• De entre todas las curvas H = H j que verifiquen el punto anterior, la que tenga el
valor más pequeño.
82
El 2o método de Lyapunov
La figura aclara porqué.
83
El 2o método de Lyapunov
Sea (δiu, 0) el punto que se escoge con el criterio antes expuesto, y H u el valor que alcanza
en él el hamiltoniano. El gran problema es determinarlo, ya que en una red eléctrica con n
generadores existen del orden de 2n puntos de
equilibrio.
Aquı́ entra un poco de heurı́stica basada en la
fı́sica del sistema.
84
El 2o método de Lyapunov
La observación clave es que los puntos de equilibrio están próximos a los puntos
(δ1, δ2, . . . , δn) ≈ (0 ó π, 0 óπ , . . . , 0 ó π)
Por otra parte, en el punto inicial, que no suele
estar muy lejos del (0, 0, . . . , 0) hay uno o unos
generadores que se mueven rápido (grandes
δi), y que llamaremos el conjunto S r ; y el resto
que se mueven despacio: el conjunto S l .
85
El 2o método de Lyapunov
Se supone entonces que el punto u es aquel
que está cerca del punto que tiene ángulo 0
para los δi ∈ S l y ángulo π para los δi ∈ S r .
86
El 2o método de Lyapunov
Por lo tanto, se plantea el algoritmo:
1. Determinar los conjuntos S l y S r a partir de las condiciones en el punto incial
(δi(0), pi(0)).
2. Calcular el punto u resolviendo las ecuaciones para los puntos de equilibrio con
un método iterativo (Newton-Ralphson, p.
ej.) partiendo del punto (0 ó π, 0 ó π, . . . , 0 ó π)
definido por S l y S r .
3. Cacular H u y H(0).
4. Si H(0) < H u el sistema no pierde estabilidad.
87
El 2o método de Lyapunov
Ejemplo, la red de New England.
88
El 2o método de Lyapunov
Las curvas de oscilación.
89
El 2o método de Lyapunov
Los resultados
90
El 2o método de Lyapunov
Queda el problema de determinar una función
de Lyapunov para un sistema concreto. No hay
método general para ello.
91
El 2o método de Lyapunov
En ocasiones, se pueden encontrar funciones
de Lyapunov por razones fı́sicas: energı́a, potenciales termodinámicos, etc.
92
El 2o método de Lyapunov
Para sistemas lineales estables se pueden calcular funciones cuadráticas de Lyapunov.
En efecto, sea P definida positiva.
función V = xT P x del sistema
Sea la
ẋ = Ax
Entonces
V̇
= ẋT P x + xT P ẋ
= x(AT P + P A)x
93
El 2o método de Lyapunov
Entonces V es función de Lyapunov si la matriz
Q definida por
−Q = AT P + P A
es positiva. Recı́procamente, podemos escoger
una matriz definida positiva Q y resolver la matriz P de la ecuación lineal anterior (ecuación
de Lyapunov).
94
El 2o método de Lyapunov
Se demuestra entonces que:
Si A es una matriz estable y Q una matriz
(semi-)definida positiva, entonces la solución
P de la ecuación
AT P + P A = −Q
es (semi-)definida positiva.
95
El 2o método de Lyapunov
Prueba
La matriz
P (t) =
Z ∞
t
T
eA (τ −t)QeA(τ −t)dτ
Verifica
Ṗ = −Q − AT P − P A
96
El 2o método de Lyapunov
Por otra parte, la integral sólo converge si A
es estable. Haciendo el cambio de variables
τ´= τ − t se comprueba que P (t) no depende
de t, luego Ṗ = 0. Ası́ pues,
P =
Z ∞
0
T
eA tQeAtdt
es solución de la ecuación de Lyapunov.
97
El 2o método de Lyapunov
Por otra parte, si Q es definida positiva, M T QM
T
lo es también para cualquier M , por tanto eA tQeAt
lo es para cualquier A, y por lo tanto lo es la
integral, si converge.
98
El 2o método de Lyapunov
Esto sugiere el siguiente procedimiento para
obtener una estimación del dominio de atracción de un punto de equilibrio x∗
99
El 2o método de Lyapunov
1. Linealizar el sistema dinámico alrededor de
x∗: ∆˙ x = fx∆x.
2. Escoger una serie de matrices definidas positivas Qi.
3. Resolver las ecuaciones fxT Pi + Pifx = −Qi.
4. Calcular la curva de nivel más baja para la
cual V̇i = 0 (ejemplo del osc. de van der
Pol).
5. Llamar Ei a las elipses limitadas por esas
curvas de nivel.
6. El dominio de atracción D ⊃ ∪Ei
100
El 2o método de Lyapunov
Existen algunos métodos sistemáticos para encontrar funciones de Lyapunov (gradiente variable, Zubov, etc. ), pero requieren mucho
cálculo, incluso para sistemas de orden moderado.
101
El 1er método de Lyapunov
Sea un sistema diferencial
ẋ = f (x)
Y supongamos que xs es un punto de equilibrio.
0 = f (xs)
102
El 1er método de Lyapunov
Para analizar su estabilidad se puede linealizar
en torno al mismo:
∆ẋ = fx∆x
Lo cual permite estudiar la evolución del sistema en primera aproximación.
103
El 1er método de Lyapunov
El propósito del primer método de Lyapunov
es obtener una solución más exacta por medio
de una serie de aproximaciones.
Primero, un poco de notación.
104
El 1er método de Lyapunov
La serie de Taylor de f (x) en torno a 0 es:
f (x) = fxx +
1
fxx(x ◦ x) +
2
1
fxxx(x ◦ x ◦ x) + . . .
6
105
El 1er método de Lyapunov
Con, el producto de Kronecker
∆x ◦ ∆x
=
∆x1
∆x2
...
∆xn
◦
∆x1
∆x2
=
...
∆xn
∆x1∆x1
∆x1∆x2
...
∆x1∆xn
∆x2∆x1
∆x2∆x2
...
∆x2∆xn
...
∆xn∆xn
106
Y
∂ 2 fn
∂x1 ∂x2
...
∂ 2 fn
∂x1 ∂x1
...
∂ 2 f1
∂x1 ∂x2
∂ 2 f2
∂x1 ∂x2
∂ 2 f1
∂x1 ∂x1
∂ 2 f2
∂x1 ∂x1
...
...
...
...
∂ 2 fn
∂x1 ∂xn
...
∂ 2 f1
∂x1 ∂xn
∂ 2 f2
∂x1 ∂xn
∂ 2 fn
∂x2 ∂x1
...
∂ 2 f1
∂x2 ∂x1
∂ 2 f2
∂x2 ∂x1
...
∂ 2 fn
∂x2 ∂x2
∂ 2 f1
∂x2 ∂x2
∂ 2 f2
∂x2 ∂x2
fxx =
...
...
...
...
∂ 2 fn
∂x2 ∂xn
...
∂ 2 f1
∂x2 ∂xn
∂ 2 f2
∂x2 ∂xn
...
...
...
...
∂ 2 fn
∂xn ∂xn
...
∂ 2 f1
∂xn ∂xn
∂ 2 f2
∂xn ∂xn
El 1er método de Lyapunov
107
El 1er método de Lyapunov
Supongamos, sin pérdida de generalidad, que
el punto de equilibrio es el origen. O sea,
ẋ = f (x)
0 = f (0 )
108
...
1
2
3
1
2
3
2 fxx (x + x + x + . . .) ◦ (x + x + x + . . .) +
1
ẋ1 + ẋ2 + ẋ3 + . . . =
f (x1 + x2 + x3 + . . .)
fx(x1 + x2 + x3 + . . .)+
Substituyendo en la ecuación diferencial:
x = x1 + x2 + x3 + . . .
Escribamos la solución como una serie:
El 1er método de Lyapunov
109
1
1
ẋ3 = fxx3 + 2 2 fxx(x1 ◦ x2)+ 6 fxxx(x1 ◦ x1 ◦ x1)
... = ...
1
ẋ2 = fxx2+ 2 fxx(x1 ◦ x1)
ẋ1 = fxx1
Escribiendo los términos del mismo orden
El 1er método de Lyapunov
110
El 1er método de Lyapunov
Estas ecuaciones pueden resolverse por orden:
primero x1, después se inserta la solución en
la segunda ecuación y se resuelve x2, después
x3, etc.
111
El 1er método de Lyapunov
Por ejemplo, consideremos el sistema no lineal:
dx
= −x + x2
dt
Y busquemos una solución
x = x 1 + x 2 + x3 + . . .
112
El 1er método de Lyapunov
Substiuyendo, se tiene
dx2
dx3
dx1
+
+
+ ... =
dt
dt
dt
−x1 − x2 − x3 + . . . + (x1 + x2 + x3 + . . .)2
113
El 1er método de Lyapunov
Igualando términos del mismo orden
dx1
dt
dx2
dt
dx3
dt
...
dxr
dt
= −x1
= −x2 + x2
1
= −x3 + 2x1x2
= ...
= −xr +
r−1
X
xj xr−j
j=1
114
El 1er método de Lyapunov
La solución de la primera ecuación es:
x1 = ae−t
Substituyendo en la segunda y resolviendo
x2 = −a2e−2t
Y en general
xr = −(−a)r e−rt
115
El 1er método de Lyapunov
Por tanto
x = ae−t − a2e−2t + a3e−3t + . . .
Sea q = ae−t. Entonces:
x = q − q2 + q3 + . . .
116
El 1er método de Lyapunov
La suma converge si −1 < q < 1. En este caso:
x = q(1 + q)−1 = a(1 + et)−1
117
El 1er método de Lyapunov
Analizemos con más cuidado la solución obtenida.
El primer término es:
ẋ1 = fxx1
Luego x1 es una función suma de exponenciales exp(λit), donde λi son los autovalores
de la matriz fx.
118
El 1er método de Lyapunov
El segundo término es:
1
ẋ2 = fxx2 + fxx(x1 ◦ x1)
2
que es un sistema lineal forzado con exponenciales exp(λit). Es bien sabido que sus soluciones son exponenciales suma de estas más
las exponeciales que resultan de fx, es decir,
hay exponenciales de la forma exp[(λi + λj ]t).
119
El 1er método de Lyapunov
Por si no es bien sabido
ẋ = fxx + g(t)
Una solución particular
x = exp(fxt)A +
Z t
−∞
exp[fx(τ − t)]g(τ )dτ
120
El 1er método de Lyapunov
Análogamente, se puede ver fácilmente que en
el paso r la solución incluye exponenciales de
la forma
exp(
X
λi1 + . . . + λir )
r terminos
121
El 1er método de Lyapunov
Por ejemplo, consideremos el problema del movimiento de los asteriodes troyanos:
122
El 1er método de Lyapunov
Las ecuaciones del movimiento son:
dr
= pr
dt
pφ
dφ
= 2 −ω
dt
r
p2
dpr
γm1
φ
= 3 − 3 (r − r1 cos(φ − φ1))
dt
r
s1
γm
− 32 (r − r2 cos(φ − φ2))
s2
dpφ
γm
= − 31 rr1 sin(φ − φ1))
dt
s1
γm
− 32 rr2 sin(φ − φ2))
s2
123
El 1er método de Lyapunov
Con
m2
R
m1 + m2
m1
r2 =
R
m1 + m2
φ2 = 0
r1 =
φ1 = π
s1 =
s2 =
q
r12 + r 2 + 2r1r cos(φ − φ1)
q
r22 + r 2 + 2r2r cos(φ − φ1)
124
El 1er método de Lyapunov
Los puntos de equilibrio estables de estas ecuaciones tienen dos autovalores imaginarios, pues
no se disipa energı́a.
125
El 1er método de Lyapunov
Una trayectoria en el plano r − φ:
126
El 1er método de Lyapunov
La función r(t):
127
El 1er método de Lyapunov
La transformada de Fourier de la función r(t):
128
El 1er método de Lyapunov
Moraleja: En estructuras, hay que tener cuidado
no sólo de que las frecuencias naturales no
puedan excitarse, sino tampoco sus diferencias
y sumas.
129
Teorı́a de catástrofes
Consideremos un sistema que tiene una función
de Lyapunov (un potencial) dependiente de
parámetros
U (x, p)
130
Teorı́a de catástrofes
En los puntos de equilibrio x∗ el potencial es
estacionario:
∂U
|x=x∗,p=p∗ = 0
∂xi
De ahora en adelante supondremos, sin pérdida
de generalidad, que x∗ = 0 y que p∗ = 0.
131
Teorı́a de catástrofes
Por lo tanto el desarrollo de Taylor de V es:
U (x, p) = U0 +
X ∂U
l
∂pl
pl +
1 X ∂ 2U
xi x j +
2 i,j ∂xi∂xj
1 X ∂ 2U
xk pm +
2 k,m ∂xk ∂pm
1 X ∂ 2U
pnps + t.m.o.
2 n,s ∂pn∂ps
132
Teorı́a de catástrofes
Los puntos de equilibrio xe(p) son función del
valor de los parámetros. Resultan de igualar el
gradiente de U a 0. Luego:
X ∂ 2U
i,j ∂xi∂xj
xej +
∂ 2U
pm + t.m.o. = 0
i,m ∂xi∂pm
X
133
Teorı́a de catástrofes
De la expresión anterior:
−1
X ∂ 2U
X ∂ 2U
e
x =
pm + t.m.o.
i,j ∂xi∂xj
i,m ∂xi∂pm
134
Teorı́a de catástrofes
Lo importante es que si
X ∂ 2U
i,j ∂xi∂xj
es regular, la solución cambia un poco cuando
cambian un poco los parámetros. No aparecen
nuevas soluciones, no desaparece ninguna. Un
punto ası́ no es un punto de bifurcación.
135
Teorı́a de catástrofes
Ası́ pues, los puntos entretenidos son aquellos
dode esa matriz es singular. Eso implica que
tiene al menos un autovalor nulo.
136
Teorı́a de catástrofes
Recordando:
AV
= VΛ
W A = ΛW
WV
= I
Λ =
λ1 0 . . . 0
0 λ2 . . . 0
· · · · · · ... · · ·
0 0 . . . λn
Luego
A = V ΛW
Luego, si A es simétrica, V T = W .
137
Teorı́a de catástrofes
Sean entonces V y W los autovectores derechos e izquierdos de
X
∂ 2U
i,j ∂xi∂xj
Y consideremos el cambio de variables
y =Vx
Este cambio es una biyección que no puede
introducir ni eliminar soluciones.
138
Teorı́a de catástrofes
Sea Ũ (y, p) = U (W y, p) el potencial trás el
cambio de variables. Ahora bien, como:
X ∂ 2Ũ
i,j ∂yi∂yj
yi yj =
X ∂ 2U
∂xk ∂xl
k,l
xk xl
Se sigue que
∂ 2Ũ
∂ 2U
xk xl W = Λ
yi yj = V
∂yi∂yj
∂xk ∂xl
139
Teorı́a de catástrofes
Ası́ pues. se tiene:
Ũ (y, p) = U0 +
X ∂ Ũ
∂pl
l
pl +
1X
λiyi2 +
2 i
1 X ∂ 2Ũ
yk pm +
2 k,m ∂yk ∂pm
1 X ∂ 2Ũ
pnps + t.m.o.
2 n,s ∂pn∂ps
El caso interesante es cuando hay uno o más
autovalores nulos. Sean estos los r primeros
(λ1 = . . . = λr = 0).
140
Teorı́a de catástrofes
Se puede demostrar el llamado lema de descomposición, que esencialmente afirma que el
tipo de singularidad que se tiene puede estudiarse exclusivamente en término a las variables
x1, . . . , xr , ignorándose todas las demás.
Más que demostrarlo en el caso general, lo veremos en los casos particulares de 1 o 2 autovalores nulos.
141
Teorı́a de catástrofes
En el caso de un autovalor nulo, se tiene que
U = U0 +
n
X
λiyi2 + yiOi(y, p) +
i=2
ay1k + P1(y1, p) + Q(p)
donde las funciones Oi son polinomios en y y
p de grado al menos 2 en y si p = 0, y P1 es
un polinomio en y1. Q es un polinomio en p.
142
Teorı́a de catástrofes
Consideremos ahora el cambio de variables:
z1 = y1
zi2 = yi2 + yiOi(y, p)
con sign(zi) = sign(yi) i = 2 . . . n
Considerado como una función de y a z es
claramente continuo y derivable infinitas veces. Para que sea un ”buen” cambio de coordenadas alrededor del origen, tendrı́a que ser
también biyectivo: un difeomorfismo.
143
Teorı́a de catástrofes
Alrededor del origen el cambio de variables se
aproxima a una transformación lineal. Será
biyectivo si la matriz de la transformación, que
es su jacobiano, es regular. Entonces, si es regular (biyectiva) en el origen, por continuidad lo
es en un entorno del mismo.
144
Teorı́a de catástrofes
Evaluemos entonces la matriz ddyz en torno al
origen.
Es evidente que
dz1
= 1
dy1
dz1
= 0 j = 2...n
dyj
145
Teorı́a de catástrofes
dzi
. Se tiene que:
Consideremos ahora dy
i
∂Oi(y, p)
2zidzi = 2yidyi + Oi(y, p)dyi + yi
dyi
∂yi
Pero Oi es un polinomio de grado al menos 2 en
monomios que no contengan p, luego al particularizar para p = 0, los dos últimos términos
son despreciables frente al primero. Luego
dzi
y
= i
dyi
zi
146
Teorı́a de catástrofes
Pero
zi2
Oi(y, p)
=1+
2
yi
yi
Al particularizar para p = 0 se tiene que el
cociente es un polinomio en al menos yi2. Por
lo tanto, en un entorno del origen
dzi
= 1 + t.m.o.
dyi
147
Teorı́a de catástrofes
dzi
. Se tiene que
Calculemos ahora dy
j
∂Oi(y, p)
2zidzi = yi
dyj
∂yj
Se tiene que
dzi
1 yi ∂Oi(y, p)
=
dyj
2 zi
∂yj
i (y,p) → 0, se tiene que
Y como yzi → 1 y ∂O∂y
i
j
dzi
= 0 + t.m.o.
dyj
148
Teorı́a de catástrofes
En conclusión
dz
= I + t.m.o. alrededor z = 0, p = 0
dy
149
Teorı́a de catástrofes
Ası́ pues, se tiene que
U = U0 +
n
X
λizi2 + az1k +
i=2
P1(z1, p) + Q(p
Ahora bien, es claro que en cualquier punto
estacionario z2 = . . . = zn = 0. Por lo tanto,
podemos olvidarnos de estas variables y considerar:
U = U0 + az1k + P1(z1, p) + Q(p)
= U0 + ay1k + P1(y1, p) + Q(p)
150
Teorı́a de catástrofes
En esta expresión se puede desarrollar en P1
en series de potencias de y1. Ası́:
U = U0 +
k−1
X
y1i ai(p) +
i=1
ay1k (1 + ak (p)) + Q(p) + t.m.o.
donde ai(0) = 0.
151
Teorı́a de catástrofes
En el último término ak es despreciable frente
a 1 para un entorno del origen. Ası́
U = U0 +
k−1
X
y1i ai(p) + ay1k + Q(p) + t.m.o.
i=1
152
Teorı́a de catástrofes
Ahora, desarrollando en serie cada ai se tiene
que:
ai(p) = aT
i p + t.m.o.
Luego
U = U0 +
k−1
X
k + Q(p) + t.m.o.
y1i aT
p
+
ay
1
i
i=1
Nótese que
∂ i+1U
ai(j) = i
∂ y1∂pj
153
Teorı́a de catástrofes
Por último, el término en y1k−1 siempre se puede
eliminar mediante un cambio de coordenadas.
En efecto, si se define
x = y1 − y0
Y se substituye, se obtiene:
U = U0 +
k−1
X
i
k
(aT
i p)(x + y0) + a(x + y0) + Q(p)
i=1
154
Teorı́a de catástrofes
Los términos de grado k − 1 son:
aTk−1pxk−1 + kxk−1y0
Luego con
y0 = −
aTk−1p
k
desaparecen los términos k − 1
155
Teorı́a de catástrofes
Substituyendo lo anterior, y despreciando términos de orden mayor al lineal en p, se obtiene
U = U0 +
k−2
X
i + axk + Q̃(p)
(bT
p
)x
i
i=1
Si se consideran caambios adicionales de coordenadas, es fácil de comprobar substituyendo
la serie de Taylor que no es posible eliminar
más términos.
156
Teorı́a de catástrofes
Por otra parte, si se trata de optimizar U , los
términos U0 y Q̃(p) no juegan ningún papel,
luego pueden omitirse. Además, igual da calcular el extremo de U o el de Ua . Dividiendo
todo por a se encuentra finalmente que el potencial es equivalente a:
W =
k−2
X
i + xk
( cT
p
)x
i
i=1
157
x3 + ux
x4 + ux2 + vx
x5 + ux3 + vx2 + wx
x6 + tx4 + ux3 + vx2 + wx
pliegue
cúspide
cola de milano
mariposa
Cada cT
i p puede considerarse como un nuevo parámetro.
Las primeras singularidades tienen nombre propio:
Teorı́a de catástrofes
158
Teorı́a de catástrofes
Un poco de nomenclatura:
• x3, x4, etc son los gérmenes de las catástrofes.
• x3 +ux, etc, son los despliegues universales.
• El número de parámetros del despliegue
universal es la codimensión de la catástrofe.
159
Teorı́a de catástrofes
Por ejemplo, consideremos un pliegue W =
x3 + ux. Recordemos que x es lo que varı́a la
solución a lo largo del autovector derecho correspondiente al autovalor nulo, y u es una determinada combinación lineal de los paránetros
p.
Derivando W respecto a x, se tiene
dW
= 3x2 + u
dx
160
Teorı́a de catástrofes
Los puntos de equilibrio verifican dW
dx = 0, de
donde
s
−u
xe = ±
3
Hay dos soluciones para u < 0 (un máximo y
un mı́nimo) y ninguna si u > 0. El autovalor
nulo se da en u = 0.
161
Teorı́a de catástrofes
El diagrama de catástrofe es:
162
Teorı́a de catástrofes
O consideremos la cúspide W = x4 + ux2 + vx.
Se tiene que, en los puntos de equilibrio se
verifica:
dW
= 4x3 + 2ux + v = 0
dx
Esta ecuación define una superficie en el espacio x, u, v.
163
Teorı́a de catástrofes
Por otra parte, el autovalor 0 implica
d2W
2 + 2u = 0
=
12x
dx2
Junto con la ecuación anterior nos da una curva,
que se proyectará como una curva en el plano
u, v.
164
Teorı́a de catástrofes
En efecto, tenemos que
u
2
x =−
6
Y que
x(4x2 + 2u) = −v
Luego
x
4u
= −v
3
165
Teorı́a de catástrofes
Elevando al cuadrado
x216u2 = 9v 2
De donde, substituyendo x2
8 3
− u = 9v 2
3
o
8u3 + 27v 2 = 0
166
Teorı́a de catástrofes
El diagrama de catástrofe es:
167
Teorı́a de catástrofes
Consideremos el problema de una viga articulada en sus extremos sujeta a una fuerza horizontal:
168
Teorı́a de catástrofes
La energı́a acumulada en la barra es proporcional a:
U (Φ, λ) =
Z l( 1 dΦ 2
0
2
ds
)
+ λ cos Φ
Y las condiciones en los extremos son:
dΦ
dΦ
(0) =
(l) = 0
ds
ds
169
Teorı́a de catástrofes
La solución del problema será la función Φ(s)
que minimice U y que esté sujeta a las condiciones de contorno.
Este es un problema en infinitas dimensiones.
Podemos pensar que Φ es el vector que antes
llamábamos x, y que sus componentes son sus
valores en cada punto.
170
Teorı́a de catástrofes
La solución será cuando la primera variación
de U respecto a Φ se anule. Como
U (Φ + δΦ) =
Z l( 1 dΦ + δΦ 2
+
2
ds
0
λ cos(Φ + δΦ)}
)
2
Z l( 1 dΦ
+ λ cos(Φ + δΦ)
=
0 2 ds
Z l
dΦ dδΦ
+
− λ sin(Φ)δΦ +
ds ds
0
t.m.o.
= U (Φ) −
)
Z l( 2
d Φ
δΦ + λ sin(Φ)δΦ
ds2
0
Z l
d dΦ
+
δΦ
0 ds ds
= U (Φ) −
)
Z l( 2
d Φ
δΦ + λ sin(Φ)δΦ
ds2
0
171
El último término se anula por las condiciones
de contorno.
Teorı́a de catástrofes
En conclusión, hemos encontrado que:
)
Z l( 2
d Φ
U (Φ + δΦ) − U (Φ) =
+ λ sin(Φ) δΦ
2
ds
0
Esta fórmula no es nada más que:
U (x + δ x) − U (x) = ∇U.x
172
Teorı́a de catástrofes
Ası́ pues, ∇U = 0 no es más que:
d2Φ
+ λ sin(Φ) = 0
2
ds
con
dΦ
dΦ
(0) =
(l) = 0
ds
ds
Una solución obvia es Φ = 0.
173
Teorı́a de catástrofes
Para buscar posibles puntos de catástrofe tenemos que mirar la segunda variación (derivadas
segundas) alrededor de Φ = 0.
Ası́, se tiene:
Z l 1 dΦ + δΦ 2
0 2
ds
=
Z l( 1 dΦ 2
2 ds
2 )
1 dδΦ
2
ds
0
+
dΦ dδΦ
+
ds ds
Y que
Z l
0
λ cos(Φ + δΦ) =
Z l
0
{λ cos Φ − λ sin(Φ)δΦ
1
− λ cos(Φ) (δΦ)2
2
174
Teorı́a de catástrofes
Luego, en conclusión,
δ 2U =
Z l( 1 dδΦ 2
0
2
ds
1
− λ cos Φ (δΦ)2
2
)
Esta fórmula se puede transformar mediante
integración por partes. En efecto
d
δΦ
ds
d2
!
d
d δΦ
δΦ =
δΦ −
δΦ δΦ
2
ds
ds ds
ds
Al integrar, el primer término se anula por las
condiciones de contorno.
175
Teorı́a de catástrofes
En conclusión:
δ 2U = −
Z l( 2
d
1
2 0
ds2
)
δΦ + λ cos(Φ)δΦ δΦ
Esta expresión es análoga a:
(
δ 2U = xT
∂ 2U
∂xixj
)
x
La existencia de un autovalor nulo implica la
anulación del término entre llaves. El vector
distinto de cero que lo anule es el autovector
correspondiente.
176
Teorı́a de catástrofes
Ası́, hay que resolver
d2
0 =
δΦ + λ cos(Φ)δΦ
2
ds
d2
=
δΦ + λδΦ
2
ds
dδΦ
dδΦ
(0) =
(l) = 0
con
ds
ds
Sólo hay soluciones no triviales cuando
√
m2π 2
λ=
, δΦ = k cos( λs)
2
l
Vamos a analizar la primera bifurcación m = 1.
177
Teorı́a de catástrofes
Por el lema de descomposición, hemos
√ de desarrollar U en la dirección de cos( λs). Entonces
δ 3U =
Z l
1
0 6
λ sin Φ(δΦ)3 = 0
Y
δ 4U
=
=
=
=
=
=
Z l
1
λ cos(Φ)(δΦ)4
0 24
Z l
1
λ
(δΦ)4
24 0
Z
√
λk4 l
4
cos ( λs)
24 0
Z
λk4 l
π
4
cos ( s)
24 0
l
λk4 3
l
24 8
π 2k4
64l
178
Teorı́a de catástrofes
En esencia, tenemos una cúspide
π2 4
k + t.m.o.
U = U0 +
64l
Sabemos que el despliegue universal de una
cúspide tiene dos parámetros, mientras que en
nuestro problema solamente hay uno.
Introduzco un parámetro adicional para seguir
un análisis ”normal”.
179
Teorı́a de catástrofes
Supongamos que el problema es ligeramente
más complicado. Sea pues, una viga con un
imán en el punto medio, que puede ser atraido
por un electroimán recorrido por una corriente
i.
180
Teorı́a de catástrofes
Habrá una contribución adicional a la energı́a
de la forma
1
Um = Ai 3
r
donde r es la distancia del punto medio de la
viga al electroimán.
l
r = r0 − y( )
2
Como
l
dy
l
2
= sin Φ → y( ) =
sin Φ
ds
2
0
Z
181
Teorı́a de catástrofes
Luego
Ai
Um =
R
!3
l
2
r0 − 0 sin Φ
Y
U =
(
Z l
dΦ 2
1
0 2
ds
)
Ai
+ λ cos Φ +
R
!3
l
2
r0 − 0 sin Φ
2
Estamos analizando en torno a i = 0 y λ = πl2 .
Por conveniencia introducimos el incremento
2
λ̃ = λ − πl2 .
182
Teorı́a de catástrofes
El despliegue de la cúspide es de la forma:
π2 4
U = U0 +
k +
64l
a1(λ̃, i)k + a2(λ̃, i)k2 +
a3(λ̃, i)k3 + a0(λ̃, i)
Lo que interesa calcular para caractrizar la cúspide
son los términos lineales de las funciones a1,a2
y a3 .
183
Teorı́a de catástrofes
La variación de U respecto a λ̃ es:
δU =
Z l
0
cos(Φ)λ̃
Substituyendo Φ = 0 + k cos( πl s)
Z l"
1
k2
#
π
2
cos ( ) + O(k4) λ̃
1−
2 0
2
l
l
k2l
=
λ̃ −
λ̃ + t.m.o.
2
8
δU =
184
Teorı́a de catástrofes
La variación de U respecto a i es:
A
δU =
R
l
2
!3 i
r0 − 0 sin Φ
Haganos
=
=
Z
l
2
0
Z l
2
0
Z l
sin Φ
sin(0 + δΦ)
π
2
=
sin k cos( s)
l
0
!
Z l
3
π
k
π
2
=
k cos( s) −
cos3( s) + t.m.o
l
6
l
0
kl k3l
=
−
+ t.m.o.
π
9π
185
Teorı́a de catástrofes
Por otra parte
A
i
δU =
(r0 − )3
A(r0 + )3
=
i + t.m.o.
r06
r03 + 3r02 + 3r02 + 3
=
Ai + t.m.o.
6
r0
Interesan los términos hasta k3, luego
k3l
"
!
Ai 3
2 kl −
+
r
+
3r
0
0
6
π
9π
r0
#
2
2
3
3
k l
k l
3r0 2 + 3
π
π
"
3r02l
Ai 3
3r0l2 2
= 6 r0 +
k+
k
2
π
π
r0
δU =
"
+
l3
π3
#
#
2
3r l
− 0 k3
9π
186
Teorı́a de catástrofes
En conclusión, el despliegue queda, tras omitir
los términos que no dependen de k
3lA
3l2A 2
l
π2 4
k + 4 ki + 2 5 k i − k2λ̃ +
W ∼
64l
8
r0
π r0
"
l3 A
#
3lA
3i
−
k
r06π 3 9r04π
192l3A 2
8l2 2
192l2A
4
∼ k + 4 2 ki + 5 4 k i − 2 k λ̃ +
π
r0 π
r0 π
"
#
4
2
64l A 64l A 3
− 4 3 k i
6
5
r0 π
3r0 π
∼ k4 + ak3 + bk2 + ck
187
Teorı́a de catástrofes
Haciendo k → x−k0 se puede eliminar el término
en k3. En efecto, tras la transformación los
términos cúbicos son
a
3
3
−4x k0 + ax → k0 =
4
Con esto, se tiene:
W ∼ (x − k0)4 + a(x − k0)3 +
b(x − k0)2 + c(x − k0)
∼ x4 + 6x2k02 − 4xk03
−3ax2k0 + 3axk02 + bx2 − 2bk0x + cx
4
2
∼ x + 6k0 − 3ak0 + b x2 +
2
3ak0 − 2bk0 + c x
188
Teorı́a de catástrofes
#
2
4
a
1 64l A 64l A
− 4 3 i
k0 = =
6
5
4
4 r0 π
3r0 π
"
Ası́ pues, es lineal en i. a, b, c son lineales
también. Si solo queremos conservar los términos lineales en los parámetros, se puede escribir
W ∼ x4 + bx2 + cx
189
Teorı́a de catástrofes
De otra manera
W ∼ x4 + ux2 + vx
con
#
4
2
1 64l A 64l A
− 4 3 i
x = k−
6
5
4 r0 π
3r0 π
8l2
192l3A
"
i − 2 λ̃
π
r05π 4
192l2A
v =
i
4
2
r0 π
u =
190
Teorı́a de catástrofes
En el diagrama de bifurcación
191
Teorı́a de catástrofes
Nótese que si i = 0 nos movemos a lo largo
de u. Sin embargo, la más mı́nimo i cambia
cualitativamente la solución.
En cambio, si hubiera más parámetros, la cúspide serı́a cualitativamente la misma. u y v
serian también función lineal de los nuevos parámetros.
192
Teorı́a de catástrofes
En conclusión, una catástrofe con un número de parámetros igual o mayor que su codimensión es estructuralmente estable. Si no,
no.
193
Teorı́a de catástrofes
En análisis por elementos finitos, se transforma
primero una ecuación diferencial en un funcional de la solución U (Φ) que hay que minimizar. Despues se busca una base de funciones
P
φi, se aproxima Φ ≈ i αiφi, y se transforma la
minimización del funcional en la minimización
de una función U (αi).
Por tanto, las únicas singularidades que aparecen son catástrofes.
194
Teorı́a de catástrofes
Se puede proceder de forma análoga para el
caso de dos autovalores nulos (corrango dos).
Entonces, se tiene que
U = U0+
n
X
λiyi2+yiOi(y, p)+P (y1, y2, p)+Q(p)
i=3
donde P es un polinomio de grado 3 al menos
en y1 e y2.
195
Teorı́a de catástrofes
Sea el cambio de variables
z1 = y1
z2 = y2
zi2 = yi2 + yiOi(y, p)
con sign(zi) = sign(yi) i = 3 . . . n
Como antes, es fácil comprobar que esta transformación es un difeomorfismo.
196
Teorı́a de catástrofes
Con este cambio se tiene:
U = U0 +
n
X
λizi2 + P (z1, z2, p) + Q(p)
i=3
donde P es un polinomio de z1 y z2 de grado
al menos tres.
197
Teorı́a de catástrofes
Como antes, es claro que en los extremos de
U , zi = 0 si i > 2. Por lo tanto, el estudio
queda reducido al de
U = U0 + P (z1, z2, p) + Q(p)
= U0 + P (y1, y2, p) + Q(p)
= U0 + P (x, y, p) + Q(p)
Se usa el cambio de notación y1 = x e y2 = y.
198
Teorı́a de catástrofes
Consideremos ahora el polinomio de tercer grado
P . Se puede escribir como
P (x, y, p) = (a1x + b1y)(a2x + b2y)(a3x + b3y)
+R(x, y, p)
= j 3 + t.m.o.
199
Teorı́a de catástrofes
Hay varias posibilidades respecto a los coeficientes ai y bi. La primera es que sean todos
reales y que todas las razones ab i sean distintas.
i
Entonces, se pueden hacer varios cambios de
variables (difeomorfismos):
j 3 ∼ (ax + by)xy
usando x → a2x + b2y, y → a3x + b3y
∼ (x + y)xy
∼ x(x2 − y 2) usando x → x + y, y → x − y
200
Teorı́a de catástrofes
Tenemos, por lo tanto, un germen
x3 − xy 2
Es la catástrofe umbı́lica elı́ptica.
201
Teorı́a de catástrofes
Consideremos ahora el caso en que a1 y b1 son
reales y a2 y b2 y a3 y b3 complejos conjugados.
j 3 = (a1x + b1y)(a2x + b2y)(a¯2x + b¯2y)
202
Teorı́a de catástrofes
Es inmediato que
j 3 = (a1x + b1y)
(<(a2)x + <(b2)y )2 (=(a2)x + =(b2)y )2
Mediante el difeomorfismo
x → <(a2)x + <(b2)y
y → =(a2)x + =(b2)y
Se obtiene:
j 3 ∼ (ax + by)(x2 + y 2)
203
Teorı́a de catástrofes
Entonces
j 3 ∼ (ax + by)(x2 + y 2)
∼ x(x2 + y 2) usando x → ax + by, y → bx − ay
∼ x3 + xy 2
∼ x3 + y 3 usando x → x + y, y → x − y
204
Teorı́a de catástrofes
Tenemos, por lo tanto, un germen
x3 + y 3
Es la catástrofe umbı́lica hiperbólica.
205
Teorı́a de catástrofes
Hasta ahora hemos supuesto que todas las razones ab i eran distintas. Consideremos ahora
a1 i a2
que b = b . Entonces:
1
2
j 3 ∼ (a1x + b1y)2(a3x + b3y)
∼ x2 y
206
Teorı́a de catástrofes
Intuitivamente, parece claro que no es posible describir el comportamiento en dos dimensiones con un monomio. Más adelante demostraremos
esto. Por el momento, baste decir que el último
germen requiere que desarrollemos hasta cuarto
grado.
207
Teorı́a de catástrofes
Sea entonces
j 4 ∼ x2y + ay 4 + by 3x +
cy 2x2 + dyx3 + ex4
Mediante el difeomorfismo
x → x − (cy 2 + dxy + ex2)
1
y → y − y2
2
Se transforma en
j 4 ∼ x2 y + y 4
Es la catástrofe umbı́lica parabólica.
208
Teorı́a de catástrofes
En conclusión, tenemos tres nuevos gérmenes:
3
2
x − xy
η(x, y) = x3 + y 3
2
x y + y4
Entonces, se tiene que
W ∼ η(x, y) +
X
ai,j (p)xiy j
209
Teorı́a de catástrofes
Consideremos difeomorfismos de la forma
x → x + φ(x, y)
y → y + ψ(x, y)
Con φ y ψ polinomios con coeficientes pequeños.
El efecto sobre η(x, y) es
η(x, y) → η(x, y) + φ(x, y)
∂η
∂η
+ ψ(x, y)
∂x
∂y
210
Teorı́a de catástrofes
Luego, con un difeomorfismo adecuado, podemos
∂η
y
eliminar todos los monomios múltiplos de ∂x
∂η
∂y .
211
Teorı́a de catástrofes
Una manera de determinar los despliegues universales es mediante el truco de Siersma:
x
x2
x3
x4
...
...
y
x2 y
x3 y
...
y2
xy
...
xy 2
x2y 2
...
...
y3
xy 3
...
...
y4
...
212
Teorı́a de catástrofes
Por ejemplo, para el despliegue universal de la
umbı́lica hipérbolica x3 + y 3:
∂x3 + y 3
= 3x2
∂x
∂x3 + y 3
= 3y 2
∂y
x
x2
x3
x4
...
...
y
x2 y
x3 y
...
y2
xy
...
xy 2
x2y 2
...
...
y3
xy 3
...
...
y4
...
El despliegue universal es:
W = x3 + y 3 + wxy + ux + vy
213
Teorı́a de catástrofes
Para deternminar el despliegue universal de la
umbı́lica elı́ptica x3 − xy 2
∂x3 − xy 2
= 2xy
∂y
∂x3 − xy 2
= 3x2 − y 2
∂x
x
x2
x3
x4
...
...
y
x2 y
x3 y
...
y2
xy
...
xy 2
x2y 2
...
...
y3
xy 3
...
...
y4
...
214
Teorı́a de catástrofes
Además, si consideremo un término de despliegue
x2 + y 2
3x3 = x(3x2 − y 2) − y(xy)
y 3 = −y(3x2 − y 2) + 3x(xy)
4x2 = (3x2 − y 2) + (x2 + y 2)
−4y 2 = (3x2 − y 2) − 3(x2 + y 2)
Luego, un despliegue universal es:
W = x3 − xy 2 + w(x2 + y 2) + ux + vy
215
Teorı́a de catástrofes
Por último, la umbı́lica parabólica y 4 + x2y
∂y 4 + x2y
= 2xy
∂x
∂y 4 + x2y
= 4y 3 + x2
∂y
x
x2
x3
x4
...
...
y
x2 y
x3 y
...
y2
xy
...
xy 2
x2y 2
...
...
y3
xy 3
...
...
y4
...
216
Teorı́a de catástrofes
Se tiene en cuenta:
x3 = (4y 3 + x2)x − 4y 2(xy)
4y 4 = y(4y 3 + x2) − x(xy)
4y 3 = (4y 3 + x2) − x2
Luego, el dsdoblamiento universal es:
W = y 4 + x2y + wx2 + ty 2 + ux + vy
217
x3 + ux
x4 + ux2 + vx
x5 + ux3 + vx2 + wx
x6 + tx4 + ux3 + vx2 + wx
x3 − xy 2 + w(x2 + y 2) + ux + vy
x3 + y 3 + wxy + ux + vy
y 4 + x2y + wx2 + ty 2 + ux + vy
pliegue
cúspide
cola de milano
mariposa
umbı́lica elı́ptica
umbı́lica hipérbolica
umbı́lica parabólica
En resumen, tenemos las catástrofes:
Teorı́a de catástrofes
218
Teorı́a de catástrofes
Claramente, existen más catástrofes si las derivadas terceras se anulan, o hay condiciones
adicionales de degeneración (las tres razones
ai
bi iguales). Pero estas catátrofes tienen codimensión mayor que 4.
Las catástrofes de la lista son las 7 catástrofes
elementales (codimensión no mayor que 4).
219
Teorı́a de catástrofes
La superficie de equilibrio viene dada por la
solución de la ecuación
∂W
=0
∂x
o
∂W
∂W
=
=0
∂x
∂y
220
Teorı́a de catástrofes
El conjunto de bifurcación requiere la condición
adicional
∂ 2W
=0
2
∂x
o
det
∂ 2W
∂x∂y
!
=0
221
Teorı́a de catástrofes
El pliegue:
222
Teorı́a de catástrofes
La cúspide:
223
Teorı́a de catástrofes
La cola de milano:
224
Teorı́a de catástrofes
La umbı́lica elı́ptica:
225
Teorı́a de catástrofes
La umbı́lica hiperbólica:
226
Teorı́a de catástrofes
La mariposa (i):
227
Teorı́a de catástrofes
La mariposa (ii):
228
Teorı́a de catástrofes
La umbı́lica parabólica:
229
Teorı́a de singularidades
Consideremos un sistema de ecuaciones dependiente de parámetros:
F(x, p) = 0
cuya linealización es:
Fx∆x + Fp∆p = 0
230
Teorı́a de singularidades
De ahora en adelante se supondrá, sin pérdida
de generalidad, que se lineliza en torno al origen x = 0, p = 0. Ası́
Fx x + Fp p = 0
231
Teorı́a de singularidades
Si Fx no es singular
x = −Fx−1Fpp
Es decir, la solución se continua suavemente.
Ası́ pues, los sitios en que suceden cosas interesates (soluciones que se crean o se destruyen)
son aquellos donde Fx es singular: las singularidades.
232
Teorı́a de singularidades
Se supone ası́ que Fx es singular. Una forma
sistemática de determinar la forma de las soluciones es mediante la reducción de LyapunovSchmidt.
233
Teorı́a de singularidades
Dado que Fx es una aplicación singular de <n
en <n, se podrá escribir:
<n = ker Fx ⊕ M
<n = N ⊕ rangoFx
Sea E la proyección de <n en el rangoFx. Entonces F(x, p) es equivalente al par de ecuaciones:
E F((x, p) = 0
(I − E)F(x, p) = 0
234
Teorı́a de singularidades
Por otra parte, se puede escribir x = v + u, con
v ∈ ker Fx y u ∈ M . Luego
E F(v + u, p) = 0
Esta última expresión la podemos considerar
como una función de (v, u, p). En torno a la
singularidad, todos estos vectores serán pequeños. Luego:
E Fxv + E Fxu + E Fpp + t.m.o. = 0
235
Teorı́a de singularidades
Pero v ∈ ker Fx, luego Fxv = 0. Se tiene entonces que, hasta términos de segundo orden
E Fxu = Fxu = −E Fpp
Si se considera esto como un sistema lineal a
resolver en u, el término independiente está en
el rango de Fx, luego el sistema tiene solución. La solución no serı́a única, sino que se
la podrı́a sumar cualquier vector en el kernel
de Fx. Pero como u es perpendicular a todos
estos vectores, es único.
236
Teorı́a de singularidades
Se ha probado que la ecuación
E F(v + u, p) = 0
tiene una única solución hasta términos cuadráticos. Esto quiere decir que tiene, localmente, una única solución. Por lo tanto, se
puede invertir para escribir:
u = U(v, p)
237
Teorı́a de singularidades
Substituyendo esta solución, se obtiene:
(I − E)F(v + U(v, p), p) = 0
Esta es una función de v ∈ ker Fx en el corrango de Fx. Ahora bien, el kernel está generado por los autovectores derechos vi correspondientes al autovalor nulo, y el corrango está
generado por los autovectores izquierdos wj .
238
Teorı́a de singularidades
Ası́, la ecuación previa es equivalente a:
wjT (I − E)F(
X
yivi + U(
i
X
yivi, p), p) = 0
i
i, j = 1 . . . rangoFx
O
wjT F(
X
i
yivi + U(
X
yivi, p), p) = 0
i
i, j = 1 . . . rangoFx
239
Teorı́a de singularidades
Dicho de otra forma, tenemos las ecuaciones
reducidas:
gj (yi, p) = 0
240
Teorı́a de singularidades
Las ecuaciones gj son difı́ciles de obtener en
forma analı́tica, debido a la dificultad existente
en obtener la función U. No obstante, es bastante fácil obtener su serie de Taylor, lo que
suele ser suficiente en muchas aplicaciones.
241
Teorı́a de singularidades
En efecto, se tiene:
"
#
∂gj
∂U
T
= wj Fx(vi +
) =0
∂yi
∂yi
∂gj
= wjT Fp + FxUp
∂p
"
!
2
∂ gj
∂U
∂U
T F
=
w
(
v
+
)
◦
(
v
+
) +
xx
i
i
j
2
∂yi
∂yi
∂yi
#
∂ 2U
Fx 2
∂yi
"
!
2
∂ gj
∂U
∂U
T
= wj Fxx (vi +
) ◦ (vk +
) +
∂yiyk
∂yi
∂yk
#
∂ 2U
Fx
∂yiyk
... = ...
242
Teorı́a de singularidades
La única dificultad para aplicar estas fórmulas
es conocer las derivadas de U. Pero esta función
viene de invertir
E F(
X
yivi + u, p) = 0
i
Se recuerda que desarrollando hasta el primer
orden se obtiene:
E Fx u + E Fp p = 0
Ası́ pues, u no depende en primer orden de yi
y por lo tanto
∂U
=0
∂yi
243
Teorı́a de singularidades
Por otra parte, derivando dos veces
E F(
X
yivi + U(yi, u, p)) = 0
Se obtiene:
"
∂ 2U
∂U
∂U
E Fx 2 + Fxx (vi +
) ◦ (vi +
)
∂yi
∂yi
∂yi
!#
=0
De donde
∂ 2U
−1 E F (v ◦ v )
=
−
F
x
xx i
i
∂yi2
244
Teorı́a de singularidades
Análogamente se demuestra que:
Up = −Fx−1E Fp
245
Teorı́a de singularidades
Una vez obtenidos los desarrollos en serie de
las gi, se pueden aplicar cambios de variables
(difeomorfismos) adicionales para eliminar los
términos de orden mayor que el primero que
aparece con coeficiente no nulo (exactamente
igual que en teorı́a de catástrofes).
246
Teorı́a de singularidades
En el caso de un autovalor nulo, tenemos tan
solo una gi: g(y, p). Desarrollando en serie:
g(y, p) = ay k +
k−1
X
b(p)y i + t.m.o.
i=0
con
b(0) = 0
247
Teorı́a de singularidades
Haciendo la transformación y → y−y0 podemos
eliminar el término en k − 1: obtenemos las
catástrofes con una variable de estado.
248
Teorı́a de singularidades
Por ejemplo, consideremos que k = 2. Sea v
el autovector derecho correspondiente al autovalor nulo, y w el izquierdo. Entonces
I − E = vT v
249
Teorı́a de singularidades
Aplicando las fórmulas anteriores:
∂g
=
∂y
=
∂g
=
∂p
=
"
w T F x (v +
∂U
)
∂y
0
wT Fp + FxUp
w T Fp − E F p
= w T Fp
∂ 2g
∂y 2
#
"
!
∂U
∂U
) ◦ (v +
) +
Fxx (v +
∂y
∂y
#
2
∂ U
Fx 2
∂y
= wT
= wT [Fxx (v ◦ v) − E Fxx(v ◦ v)]
= wT [Fxx (v ◦ v)]
250
Teorı́a de singularidades
En suma, se tiene que
1 T
w Fxx(v ◦ v)y 2 + wT Fpp + t.m.o. = 0
2
Esta es la expresión de la forma normal de la
bifurcación pliegue.
251
Teorı́a de singularidades
Una lista de singularidades:
252
Métodos de continuación
Sea la ecuación
f (x, λ) = 0
donde λ es un parámetro que varı́a en un determinado intervalo. El problema es calcular el
comportamiento de la solución en dicho intervalo.
253
Métodos de continuación
Se parte de una solución conocida x0, λ0. Se
pretende entonces obtener una serie de soluciones
{(xk , λk )}
254
Métodos de continuación
Para pasar de la soluciók k a la k + 1 se realiza
un proceso en dos pasos:
1. Predicción: A partir de la solución conocida (xk , λk ) se estima una solución (x̃k+1, λ̃k+1).
2. Corrección: La solución estimada (x̃k+1, λ̃k+1).
se corrige a una nueva solución (xk+1, λk+1).
255
Métodos de continuación
Es preciso dar también algún control sobre la
distancia de (xk , λk ) a (xk+1, λk+1): el control
de longitud de paso. También es preciso, en
el caso de que haya ramas de soluciones que se
unan o desparezcan, dar algún procedimiento
para escoger rama: la estrategia de parametrización.
256
Métodos de continuación
Un método de continiación queda definido cuando
se especifica:
1. El predictor.
2. La estrategia de parametrización.
3. El corrector.
4. El control de la longitud del paso.
257
Métodos de continuación
Los predictores pueden ser divididos en dos
clases:
• Predictores EDO, basados en f (x, λ) y sus
derivadas.
• Extrapolación polinomial, que sólo usa soluciones de la ecuación f (x, λ) = 0.
258
Métodos de continuación
Métodos EDO
Tomando el diferencial de la ecuación a resolver:
0 = df = fxdx + fλdλ
de donde
dx
−1 f
=
−
f
x
λ
d
λ
Ası́, si integro esta EDO (Euler, Runge-Kuta,
etc) obtengo la rama de soluciones.
259
Métodos de continuación
Si nos acercamos a un punto donde det(fx) =
0, vamos a tener dificultades con esta ecuación.
Una solución es cambiar el parámetro de λ a
la longitud de arco s:
Sea x = x(s), y λ = λ(s).
260
Métodos de continuación
0 = fx
dλ
dx
+ fλ
ds
ds
Y además:
2
dx1 2
dxn 2
dλ
+ ... +
+
=1
ds
ds
ds
Esta es una ED implı́cita en las incógnitas
x1, x2, . . . , λ. Más adelante veremos como se
integra.
261
Métodos de continuación
Un predictor EDO importante es el predictor
de la tangente. De:
fxdx + fλdλ = 0
Se sigue
[fx, fλ] z = 0
con
zi = dxi 1 ≤ i ≤ n zn+1 = dλ
262
Métodos de continuación
La tangente z no tiene un módulo definido.
Una manera de dárselo es hacer, por ejemplo:
eTk z = zk = 1
De donde
"
fx, fλ
eTk
#
z = en+1
263
Métodos de continuación
La ecuación anterior tiene solución simpre que
rango [fx, fλ] = n
Lo cual es posible (o no) incluso si det fx = 0.
264
Métodos de continuación
Una vez calculado z se construye el predictor
(x̃k+1, λ̃k+1) = (xk , λk ) + σ z
siendo σ el paso apropiado.
El método ası́ descrito (de la tangente) se
puede considerar análogo al método de Euler
para EDO.
265
Métodos de continuación
Volviendo al método de la longitud de arco.
Consideremos las ecuaciones
dxn+1
dx
0 = fx + fλ
ds
ds
!2
2
2
dxn+1
dx1
dxn
1 =
+ ... +
+
ds
ds
ds
Con λ = xn+1.
266
Métodos de continuación
Supongamos ahora que se hace temporalmente,
m = 1. Entonces la primera
para algún m, dx
ds
ecuación (lineal) puede resolverse en el resto
de las incógnitas para obtener:
dxi
= ci
ds
267
Métodos de continuación
Debido a la linealidad, la solución real verificará:
dxi
dxm
= ci
ds
ds
Substituyendo en la segunda ecuación (no lineal):
2
dx
m
2
2
2
=1
(c2
+.
.
.+c
+1+c
+.
.
.+c
)
1
m−1
m+1
n+1
ds
m , y después el resto.
De donde se despeje dx
ds
268
Métodos de continuación
Extrapolación polinomial
Se puede hacer pasar un polinomio de grado ν
a través de los ν + 1 puntos
(xj , λj ), (xj−1, λj−1), . . . , (xj−ν , λj−ν
269
Métodos de continuación
Por ejemplo,
• El predictor de orden 0:
(xj+1, λj+1) = (xj , λj )
• El prdictor de orden 1:
(xj+1, λj+1) = (xj , λj )+σj (xj −xj−1, λj −λj−1)
270
Métodos de continuación
Parametrización
Una parametrización es algo que nos permite
identificar de manera no ambigua cada solución
a lo largo de una rama de soluciones.
Por ejemplo, λ no es un buen parámetro, mientras que [y ] lo es.
271
Métodos de continuación
Una manera sistemática de tratar las parametrizaciones es introduciendo el parámetro γ a
través de la ecuación:
p(x, λ, γ) = 0
El sistema original de ecuaciones se agranda:
F(X, γ) =
f (x, λ)
p(x, λ, γ)
!
con X = (x, λ).
272
Métodos de continuación
Distintas parametrizaciones corresponden a diferentes funciones p. Por ejemplo, si se toma el
propio λ como parámetro de continuación, se
tiene γ = λ, y:
p(x, λ) = λ − λj+1
273
Métodos de continuación
Otra solución más interesante, que evita problemas en los pliegues, es hacer que γ sea algo
similar a la longitud del arco:
p(x, λ, γ) =
n
X
(xi−xi(sj ))2+(λ−λ(sj ))2−(s−sj )2
i=1
274
Métodos de continuación
A veces conviene pesar distinto variables y parámetros:
p(x, λ, γ) = ζ
n
X
(xi − xi(sj ))2 +
i=1
(1 − ζ)(λ − λ(sj ))2 − (s − sj )2
275
Métodos de continuación
También puede escogerse cualquier componente
de x como parámetro γ. Esto conduce a ecuaciones:
p(x, λ, γ) = xk − γ
276
Métodos de continuación
Esta selección se llama parametración local. Si
se utiliza en conjunción con el predictor de la
tangente, es habitual escoger el ı́ndice k tal
que
n
kzk k = max kz1k, . . . , kznk, kzn+1k
o
277
Métodos de continuación
Correctores
Un corrector es un procedimiento para encontrar una solución de la ecuación f (xj+1, λj+1) a
˜ ).
partir de una solución aproximada (xj+1
˜ , λj+1
278
Métodos de continuación
El sistema de ecuaciones f (x, λ) = 0 tiene n
ecuaciones y n + 1 incógnitas. Se necesita una
ecuación adicional. Por ejemplo:
1. λ = λ̃j .
2. xk = x̃k .
279
Métodos de continuación
Si se utiliza el predictor de la tangente se puede
dat como ecuación adicional
T
∆x , ∆λ z = 0
280
Métodos de continuación
Una vez escogida la ecuación adicional, se resuelve por algún método tradicional, como NewtonRaphson.
281
Métodos de continuación
Control de longitud de paso
Depende mucho del predictor y corrector usados. Dos simples estrategias son:
• Paso constante.
• Decidir el número de iteraciones que queremos en el corrector Nopt y actualizar el
N
paso multiplicando el paso previo por Nopt ,
j
donde Nj son las iteraciones que de hecho
se tuvieron con el corrector.
282
Métodos de continuación
En ocasiones, la longitud del paso depende de
lo que estemos interesados en calcular. Por
ejemplo, en estudios de estabilidad iremos más
lentos al acercarnos al punto donde la estabilidad se pierde.
283
Bifurcaciones locales de puntos de equilibrio
Sea un sistema diferencial:
ẋ = f (x, p)
Supongamos que existe un punto de equilibrio
xs:
0 = f (xe, pe)
284
Bifurcaciones locales de puntos de equilibrio
El primer paso para analizar la estabilidad de
este sistema alrededor de xe es analizar el jacobiano fx.
285
Bifurcaciones locales de puntos de equilibrio
Teorema de Hartman-Grobman
Sea Φt el flujo asocido al sistema no linear
previo.
Si fx no tiene autovalores de parte real nula,
existe un homeomorfismo h en un entorno de
xs tal que
Φ ◦ h = h ◦ exp(fxt)
286
Bifurcaciones locales de puntos de equilibrio
Por otra parte, si fx es regular, sabemos que
no pueden aparecer ni desaparecer puntos de
equilbrio.
En conclusión, si todos los autovalores tienen
partes reales no nulas, el sistema es localmente
como un sistema local, y los sistema pròximos
son similares.
287
Bifurcaciones locales de puntos de equilibrio
Ası́, los sitios “interesantes” (bifurcaciones) son
aquellos en los que el jacobiano tiene algún autovalor con parte real nula.
288
Bifurcaciones locales de puntos de equilibrio
Para analizar estos puntos nos gustarı́a generalizar algunos conceptos de sistemas lineales.
Una propiedad importante de los autovectores
derechos es que definen conjuntos invariantes.
289
Bifurcaciones locales de puntos de equilibrio
Si elsistema diferencial verifica el teorema de
Hartman-Grobman la generalización es obvia:
basta aplicar el homeomorfismo h al subespacio definido porlos autovectores derechos.
290
Bifurcaciones locales de puntos de equilibrio
Teorema del espacio central
Sea fx el jacobiano de un sistema diferencial
en un punto de equilibrio. Sean E s, E u y E c
los subespacios generados por los autovectores
de partes reales negativas, positivas y nulas respectivamente. Entonces existen espacios invariantes W s, W uy W c del sistema no lineal
que son tangentes en el punto de equilibrio a
los subesoacios lineales. W s y W u son localmente únicos. W c no tinene porqué.
291
Bifurcaciones locales de puntos de equilibrio
ẋ = x2
ẏ = −y
292
Bifurcaciones locales de puntos de equilibrio
De todas formas, hay dos hechos:
• Todos los W c tienen las mismas propiedades
de estabilidad.
• Solo hay un W c analı́tico.
293
Bifurcaciones locales de puntos de equilibrio
Nota: Esto no implica que para analizar las
propiedades de estabilidad de un sistema no lineal baste con analizar el sistema en la dirección
del autovector cuyo autovalor tenga parte realnula.
294
Bifurcaciones locales de puntos de equilibrio
El teorema del subespacio central muestra que
el sistema no lineal es conjugado a:
x̃˙ = f˜(x̃)
ỹ˙ = −ỹ
z̃˙ = z̃
(x̃, ỹ, z̃) ∈ W c × W s × W u
295
Bifurcaciones locales de puntos de equilibrio
Calculemos ahora f˜. Supongamos que no hay
autovalores inestables. Entones, el sistema no
lineal se puede escribir:
ẋ = Bx + f (x, y)
ẏ = Cy + g(x, y)
con C estable, B neutra y f y g al menos
cuadráticas.
296
Bifurcaciones locales de puntos de equilibrio
El subespacio cenral se puede escribir como:
W c = {(x, y)ky = h(x)}
El sistema proyectado en W c es:
ẋ = Bx + f (x, h(x))
que debe ser f˜.
297
Bifurcaciones locales de puntos de equilibrio
En el subespacio central se tiene que:
ẏ = hxẋ
= hx (Bx + f (x, h(x)))
= Ch(x) + g(x, h(x))
= 0
298
Bifurcaciones locales de puntos de equilibrio
Ası́ pues, para encontrar h hay que resolver la
EDP:
hx (Bx + f (x, h(x))) − Ch(x) − g(x, h(x)) = 0
con condiciones iniciales:
0 = h(0) = hx(0)
299
Bifurcaciones locales de puntos de equilibrio
En general, resolver esta ecuación es tan difı́cil
como resolver la ecuación diferencial original.
Pero es posible substituir una serie polinómica
e identificar coeficientes hasta cualquier grado
deseado.
300
Bifurcaciones locales de puntos de equilibrio
Pretendemos ahora encontrar un cambio de
variables que transforme el sistema
ẋ = f (x)
en un sistema tan sencillo como sea posible.
301
Bifurcaciones locales de puntos de equilibrio
Supongamos que la matriz fx tiene n autovalores distintos. Entonces, hay un cambio de
coordenadas que transforma el sistema en:
ẋ1 = λ1x1 + g1(x1, x2, . . . , xn)
ẋ2 = λ2x2 + g2(x1, x2, . . . , xn)
... = ...
ẋn = λnxn + gn(x1, x2, . . . , xn)
o
ẋ = Λx + g(x)
302
Bifurcaciones locales de puntos de equilibrio
Supongamos que g solamente tiene términos
a partir del orden k. Consideremos un cambio
de coordenadas casi lineal:
x = y + P (y)
con P un polinomio de orden k.
303
Bifurcaciones locales de puntos de equilibrio
Ası́
ẏ = (I + Py )−1f (y + P (y))
Pretendemos desarrollar esta expresión en serie
polinómica hasta los términos de orden k.
304
Bifurcaciones locales de puntos de equilibrio
Sea g k (x) el término de orden k. Entonces,
hasta orden k:
ẏi = λiyi + λiPi(y) + gik (y) −
n
X
∂Pi
j=1 yj
λj yj
305
Bifurcaciones locales de puntos de equilibrio
Si se desean eliminar los términos de orden k
del desarrollo, habrá que resolver el sistema:
λiPi(y) −
X ∂Pi
yj
λj yj = −gik (y)
El término de la izquierda es un operador lineal
a a
an se tiene
sobre P . Además, si Pi = y11 y22 . . . yn
P
que el lado izquierdo es (λi − aj λj )Pi. O
sea, los monomios son autovectores de este
operador los autovalores dados arriba.
306
Bifurcaciones locales de puntos de equilibrio
En particular, si los autovalores de fx verifican
P
la ecuación diofántica λi − aj λj = 0, entonces
los monomios correspondientes no se pueden
eliminar.
307
Bifurcaciones locales de puntos de equilibrio
De todas formas, si se quiere linealizar el campo
vectorial, lo anterior no enseña que:
1. La resolubilidad depende de la parte lineal.
2. El problema se puede reducir a resolver una
secuencia de ecuaciones lineales.
308
Bifurcaciones locales de puntos de equilibrio
Consideremos una función lineal L (normalmente fxx) y un polinomio P k de grado k. Sea
H k el espacio de los polinomios de grado k.
Entonces L induce una función ad L sobre H k
mediante:
ad L(P k ) = LxP − PxL
En componentes:
ad L(P k )i =
n
X
∂Li
∂Pik
k
Pj −
Lj
x
∂x
j
j=1 j
309
Bifurcaciones locales de puntos de equilibrio
Nota
El parétesis de Lie de dos campos vectoriales
f y g es:
[f, g]i =
n
X
∂gi
j=1 xj
fj −
∂fi
gj
xj
Ası́,
ad L(P k ) = [P k , L]
310
Bifurcaciones locales de puntos de equilibrio
Las cuentas anteriores se pueden formalizar en
el siguiente teorema:
Sea ẋ = f (x) un sistema diferencial tal que
f (0) = 0. Sea L = fxx. Sea Gk el complemento tal que H k = ad L(H k ) + Gk . Entonces
hay un cambio de coordenadas tal que el sistema se transforma en ẏ = g 1(y) + g 2(y) +
. . . + g r (y) + Rr , con g 1 = L y g k ∈ Gk , y
Rr = o(kykr ).
311
Bifurcaciones locales de puntos de equilibrio
La prueba es por inducción. Se van intentando
eliminar los términos desde los cuadráticos en
adelante. Cambios de coordenadas del tipo
x = y + P k (y). elimina todos los monomios
salvo los que esten en Gk .
312
Bifurcaciones locales de puntos de equilibrio
Para ver como funciona esto consideremos un
sistema ẋ = f (x, µ), que para µ = 0 tiene un
autovalor nulo.
ẋ = f (x, µ)
313
Bifurcaciones locales de puntos de equilibrio
El sistema se puede escribir como:
ẋ = f (x, µ)
µ̇ = 0
Este es el sistema suspendido.
314
Bifurcaciones locales de puntos de equilibrio
Podemos aplicar el teorema del espacio central
a este sistema de dos autovalores nulos. Si
proyectamos el sistema en el espacio central
se obtiene:
ẋ = f (x, µ)
µ̇ = 0
315
Bifurcaciones locales de puntos de equilibrio
Este sistema se puede escribir
"
ẋ
µ̇
#
"
=
0 b
0 0
#"
x
µ
#"
g(x, µ)
0
#
316
Bifurcaciones locales de puntos de equilibrio
Por lo tanto, el operador ad L es:
"
0 b
0 0
#"
P1k
P2k
#
∂P1k
− ∂xk
∂P2
∂x
∂P1k
∂µ
∂P2k
∂µ
317
Bifurcaciones locales de puntos de equilibrio
Si particularizamos en P 2, se tiene que este
operador resulta en la tabla:
∂
∂x
∂
∂y
x2
∂
2bxµ ∂x
∂ − 2bxµ ∂
bx2 ∂µ
∂x
xµ
∂
bµ2 ∂x
∂ − bµ2 ∂
bxµ ∂µ
∂x
µ2
0
∂
bµ2 ∂µ
318
Bifurcaciones locales de puntos de equilibrio
La matriz asociada es:
b
0
2
0
0
0
0
0
0
1
0
0
0
0 0
0 0
0 −2 0 0
0 0 −1 0
0 1
0 0
0 0
1 0
0 0
0 1
319
Bifurcaciones locales de puntos de equilibrio
Es fácil comprobar que esta matriz tiene un autovalor nulo de multiplicidad triple y autovector
izquierdo:
[1000000]
Esto significa que G2 = x2. Por lo tanto, el
sistema dinámico original se puede transformar
en:
"
ẋ
µ̇
#
"
=
0 b
0 0
#"
x
µ
#"
ax2
0
#
+ O(3)
320
Bifurcaciones locales de puntos de equilibrio
Claramente
a=
1
fxx
2
Pero x = vT x + O(2), donde v es el autovector
derecho correspondiente al autovalor nulo. Ası́
que
a=
1 T
w f (v ◦ v )
2
(Comparar con la reducción de Lyapunov-Schmidt)
321
Bifurcaciones locales de puntos de equilibrio
Análogamente
b = wT fµ
322
Bifurcaciones locales de puntos de equilibrio
Hemos demostrado que el sistema se puede
transformar en:
ẋ = ax2 + bµ
Esto es una bifurcación silla-nodo.
323
Bifurcaciones locales de puntos de equilibrio
Un vistazo a la bifurcación:
324
Bifurcaciones locales de puntos de equilibrio
La solución de la ecuación dinámica más allá
de la nariz es:
x(t) =
325
Bifurcaciones locales de puntos de equilibrio
El colapso de Bretaña:
326
Bifurcaciones locales de puntos de equilibrio
El caso de dos autovalores puramente imaginarios puede analizarse con las mismas técnicas.
El resultado final es:
ẋ = (dµ + a(x2 + y 2)x − (ω + cµ + b(x2 + y 2))y
ẏ = (ω + cµ + b(x2 + y 2))x + (dµ + a(x2 + y 2))y
Se llamma bifurcación de Hopf.
327
Bifurcaciones locales de puntos de equilibrio
En coordenadas polares, queda:
ṙ = (dµ + ar 2)r
θ̇ = (ω + cµ + br 2)
328
Bifurcaciones locales de puntos de equilibrio
Según el signo de a se tiene:
329
Bifurcaciones locales de puntos de equilibrio
Los coeficiente a, b, c, d dependen de las derivadas
terceras del sistema diferencial. Pretender calcularlos mediante la linearización de Poincaré
es como horrible.
Pero hay otras formas.
330
Ciclos lı́mite
Una órbita periódica del sistema diferencial
ẋ = f (x, p)
es una trayectoria x(t) que verifica el anterior
sistema diferencial y que además
x(0) = x(T )
T se llama el periodo de la órbita.
331
Ciclos lı́mite
Para que haya un órbita periódica el sistema
tiene que tener dimensión al menos 2. En
efecto, si dim(x) = 1
ẋ = f (x)
Z x
d
f (x)dx
= −
−
dx
0
d
= − V (x)
dx
V es función de Lyapunov, y por tanto no hay
más atractores que puntos de equilibrio.
332
Ciclos lı́mite
Se puede demostrar análogamente que en sistemas en <2 no hay más atractores que puntos
de equilibrio y ciclos lı́mite (teorema de Bendixon).
333
Ciclos lı́mite
Se desea calcular una órbita periódica del sistema
dx
= f (x)
dt
Esto es, calcular una trayectoria x(t) tal que
x(0) = x(T ), siendo T desconocido.
334
Ciclos lı́mite
Para hacer esto, primero se normaliza el tiempo
del sistema de forma que:
t = T t́
con lo que el problema queda:
dx
= T f (x)
dt́
x(0) = x(1)
335
Ciclos lı́mite
A continuación discretizamos la trayectoria por
n puntos, y transcribimos el operador ddt́ por
algún esquema de diferencias finitas. Por ejemplo, si se usa la regla trapezoidal:
d
1
→
dt́
n
1
0 0 . . . −1
−1 1 0 . . . 0
0 −1 1 . . . 0
...
... ... ... . . .
=∆
336
Ciclos lı́mite
Y la ecuación se discretiza a:
∆
x(1)
x(2)
...
x(n)
=T
i
f (x(1))
f (x(2))
...
f (x(n))
i
Si la dimensión de x es m, este es un sistema
de n × m ecuaciones y n × m + 1 incógnitas (
las x’s y T ).
337
Ciclos lı́mite
La ecuación que falta es la que da la fase del
ciclo lı́mite, que es arbitraria. Una opción es
hacer x(1)1 = a, siendo a un valor arbitrario
que se sabe que x(1) tomará en algún momento.
338
Ciclos lı́mite
Una vez añadida esta última ecuación se puede
resolver el sistema por algún método más o
menos estándar, como Newton-Ralphson o Jacobi (nótese que el jacobiano es extremadamente ralo).
339
Ciclos lı́mite
En el caso de un sistema que se puede escribir como un sistema dinámico lineal en cascada con una nolinealidad estática, existe un
método aproximado de análisis conocido comoel método de la función caracterı́stica o del
balance armónico.
340
Ciclos lı́mite
La idea es ecribir x(t) mediante su serie de
Fourier:
x(t) =
∞
X
ak exp (jkωt)
k=−∞
siendo ω la pulsación del ciclo lı́mite. Ahora
debemos comparar los efectos del sistema lineal y de la nolinealidad en los coeficientes ak .
341
Ciclos lı́mite
Como la nolinealidad es estática, la señalΨ(x(t))
si x(t) es el ciclo lı́mite, tendrá la misma frecuencia que x. Ası́ pues
ψ(x(t)) =
∞
X
ck exp (jkωt)
k=−∞
donde los ck son funciones de los ak
ci = ci(ak )
342
Ciclos lı́mite
Por otra parte, el efecto de la parte lineal es
transformar el coeficiente ck en G(jkω)ck . Luego,
tenemos el sistema de infinitas ecuaciones:
G(jωk)ck + ak = 0
ci = ci(ak )
Lo que necesitamos es una aproximación de
dimension finita de estas ecuaciones.
343
Ciclos lı́mite
Como x y Ψ son reales sólo los k positivos son
necesarios. Supongamos que G(s) es pasabaja
con frecuencia de corte kω. Dado que todavı́a
no conocemos ω esto es una suposición.
Entonces G(jkω) = 0, si k > q, se sigue que
ak = 0 si k > q.
344
Ciclos lı́mite
Ası́, entonces tenemos el sistema:
G(jωk)ck + ak = 0
ci = ci(ak )
k≤q
345
Ciclos lı́mite
En el caso de que q = 1 se tiene:
G(0)c0(a0, a1) + a0 = 0
G(jω)c1(a0, a1) + a1 = 0
La primera ecuación es real y la segunda compleja. Hay cuatro incógnitas por la dimensión
de x: a0, las componentes real e imaginaria de
a1, y ω.
La variable extra se elimina escogiendo la fase
del ciclo lı́mite. En el caso de que x tenga
dimensión 1, esto se puede hacer imponiendo
a , con a real.
a1 = 2j
346
Ciclos lı́mite
De la primera ecuación G(0)c0(a0, a1) + a0 = 0
se puede despejar a0 en función de a1. Si ψ es
impar se tiene a0 = 0.
La segunda ecuación, se puede escribir:
a
−1
G(jω) = −
=
2jc1(a0, a/2j)
N (a)
347
Ciclos lı́mite
Este sistema se puede resolver gráficamente:
348
Ciclos lı́mite
Estos gráficos permiten también analizarla estabilidad del ciclo lı́mite. Si perturbo el sistema
se obtiene:
G(jω + ∆s) =
−1
N (a + ∆a)
∆s no puede ser imaginario. La parte real indica si el ciclo crece o decrece, y debe tener
distinto signo que a, para que el ciclo sea estable.
349
Ciclos lı́mite
Pasando a diferenciales:
!
∂G
∂G
∂
−1
∆s = −j
∆s =
∆a
s
ω
∂a N (a)
de donde, si se define:
∂
−1
∂G(ω)
η=
ζ=
∂ω
∂a N (a)
!
se obtiene:
Re∆s
η
= −Im
∆a
ζ
!
350
Ciclos lı́mite
La condición de estabilidad se puede escribir
entonces:
0 < faseη − faseζ < π
Gráficamente
351
Ciclos lı́mite
Los anteriores resultados se pueden aplicar a
sistemas de la forma
ẋ = f (x)
sin más que considerar G(s) = 1s .
352
Ciclos lı́mite
En general, el método del balance armónico
solo dar respuestas aproximadas y ni siquiera
garantiza la existencia de la órbita periódica.
Por lo tanto, sus resultados han de comprobarse por otros medios,como simulación. No
obstante, hay alguna excepción . . .
353
Ciclos lı́mite
Consideremos que las cosas dependen de un
parámetro µ: G(s, µ) y ψ(x, µ). Supongamos
que para µ = 0 existe un punto de equilibrio x0
y un par de autovalores conjugados λ = ±jω0.
Por el teorema de la bifurcación de Hopf sabemos que existe un ciclo lı́mite asociado a la
bifurcación de Hopf. Podemos intentar utilizar el balance armónico para determinar los
parámetros de la bifurcación.
354
Ciclos lı́mite
Sabemos que para el cálculo de la bifurcación
es preciso conocer los términos hasta el tercer grado. Por lo tanto, podemos desarrollar
f (x, µ) hasta los términos de tercer grado y
aplicar el balance armónico.
355
Ciclos lı́mite
El resultado es:
Sean v y u los autovectores derecho e izquierdo
del sistema (G(s), fx) asociado a ±jω0. Sea
además
v0 = (I − G(0)fx)−1G(0)fxx(v ◦ v ∗)/4
v2 = (I − G(2jω0)fx)−1G(2jω0)fxx(v ◦ v)/4
z = fxxx(v ◦ v ◦ v)/8 + fxx(v ◦ v0) + fxx(v ∗ ◦ v2)/2
u.G(jω0)z
σ =
u.Ǵ(jω0)fxv
donde Ǵ indica la derivada respecto a ω.
356
Ciclos lı́mite
dλ 6= 0y Re(σ) 6=
Supongamos que en µ = 0, Re dµ
0. Sea χ = ±1 el signo de su razón, ası́ que
2 σ + jτ , con β y τ reales. Entonces,
χ dλ
=
β
µ
para µ = χδ 2, con δ lo bastante pequeño, existe una órbita periódica con:
ω = ω0 + δ 2τ + t.m.o.
x(t) = Re x0 + δ 2β 2v0 + δβv exp(jωt)+
2
2
δ β v2 exp(2jωt) + t.m.o.
357
Perturbación, promediado y perturbación singular
Consideremos un sistema dependiente de un
parámetro pequeño:
ẋ = f (x, t, )
Supongamos además que es conocida una solución
x0(t) para = 0. Se desea calcular x(t, ).
358
Perturbación, promediado y perturbación singular
El proceso clásico de resolución es escribir x(t, )
como una serie formal:
x(t, ) = x0(t) +
NX
−1
k xk (t) + N xR (t, )
k=1
359
Perturbación, promediado y perturbación singular
Supongamos ademas que la condición inicial la
escribimos:
x(0, ) = η() = η(0) +
NX
−1
k ηk + N ηR ()
k=1
360
Perturbación, promediado y perturbación singular
Substituyendo esto en la ecuación diferencial:
NX
−1
ẋk k + N ẋR N = f (t, x(t), )
k=0
= h(, t)
=
NX
−1
hk (t)k + hR (, t)N
k=0
Dado que esto es una identidad, los coeficientes de k en cada término han de ser iguales.
361
Perturbación, promediado y perturbación singular
Identifiquemos los coeficientes hk (t).
El término de orden 0 es:
h0(t) = f (t, x0(t), 0)
con
ẋ0 = f (t, x0, 0) x0(0) = η0
362
Perturbación, promediado y perturbación singular
El término de orden 1 es:
∂
h1(t) =
f (t, x(t, ), )k=0
∂
∂x
∂f
∂f
(t, x(t, ), ) (t, ) +
(t, x(t, ), ) k=0
=
∂x
∂
∂
∂f
∂f
=
(t, x0(t), 0)x1(t) +
(t, x0(t), 0)
∂x
Luego
∂f
∂f
(t, x0(t), 0)x1(t) +
(t, x0(t), 0)
∂x
∂
x1(0) = η1
ẋ1 =
363
Perturbación, promediado y perturbación singular
Esta ecuación es una ecuación lineal.
Dos comentarios:
1. Si este procedimiento se aplica a un sistema alrededor de un punto de equilibrio
llegamos al primer método de Lyapunov.
2. El procedimiento, aunque directo, conlleva
en general un álgebra bastante engorrosa
a partir de x2.
364
Perturbación, promediado y perturbación singular
Por ejemplo, consideremos el siguiente circuito:
365
Perturbación, promediado y perturbación singular
Las ecuaciones dinámicas son:
dv1
1
1
=
(E − v1) − ψ(v1) −
(v1 − v2)
dt
R
Rc
1
1
dv2
=
(E − v2) − ψ(v2) −
(v2 − v1)
C
dt
R
Rc
C
La caracterı́stica de los diodos es:
−3
ψ(v) = 10
17, 76v − 103, 79v 2
+ 229, 62v 3 − 226, 31v 4 + 83.72v 5
366
Perturbación, promediado y perturbación singular
Si Rc = ∞ tenemos dos sistemas desacoplados.
Ası́, si Rc es grande, tenemos un problema que
se puede poner en la forma anterior.
Intentar, en estas condiciones, integrarlo directamente puede ser poco apropiado, pues tenemos un problema mal acondicionado.
367
Perturbación, promediado y perturbación singular
No se debe tomar Rc directamente como ,
pues es un parámetro ”adimensional”, mientras que Rc tiene dimensión.
Escalemos por lo tanto las ecuaciones.
1. Escalamos las variables v1 y v2 para que
sus valores sean del orden de 1. Serán del
orden de E, que es 1,2 V. No hace falta
normalización.
2. Escalamos el tiempo para que las cosas
cambien en tiempo de orden 1. El tiempo
caracterı́stico del sistema será del orden
RC. Introduzco un nuevo tiempo τ = t/RC.
368
Perturbación, promediado y perturbación singular
Con estos cambios, el sistema queda:
R
(v1 − v2)
Rc
R
v̇2 = E − v2 − Rψ(v2) −
(v2 − v1)
Rc
v̇1 = E − v1 − Rψ(v1) −
Esto sugiere = RRc .
A este sistema se puede ya aplicar la teorı́a
previa.
369
Perturbación, promediado y perturbación singular
Los resultados:
370
Perturbación, promediado y perturbación singular
El método anterior, en general, solamente garantiza que la solución exacta x(t, ) y la solución
P −1
k permanecen
aproximada obtenida N
x
(t)
k
k=0
próximas durante un tiempo finito.
Por tanto, este método no permite, si más,
analizar cuestiones asintóticas, como la estabilidad.
371
Perturbación, promediado y perturbación singular
Hay, sin embargo, algunos casos en que podemos
decir algo más. Supongamos un sistema de la
forma
ẋ = f (x) + g(x, t, )
Y supongamos que conocemos una solución
explı́cita al sistema
ẋ = f (x)
Sea x̃(t) esta solución.
372
Perturbación, promediado y perturbación singular
Entonces, la función y(t) = x(t) − x̃(t) verifica:
ẏ(t) = g(x(t), t, )
= g(y(t) + x̃(t), t, )
= h(y, t, )
Esta ecuación es la forma estándar para aplicar
el método de promediación (averaging).
373
Perturbación, promediado y perturbación singular
Es habitual que la función h(y, t, ) sea periódica.
Esto es porque x̃(t) es periódica y g autónoma.
Sea T el periodo del periodo.
374
Perturbación, promediado y perturbación singular
Consideramos, pues, sistemas de la forma:
ẋ = f (x, t, )
y el sistema promediado:
1 T
ẏ = f (y, t, 0)dt = f¯(y)
T 0
Z
375
Perturbación, promediado y perturbación singular
Si x(t) es una órbita periódica estable del sistema sin promediar se tiene que:
kx(t) − y(t)k = O() ∀t ∈ [0, ∞)
En caso de otros atractores, el comportamiento
es también satisfactorio.
376
Perturbación, promediado y perturbación singular
El procedimiento de promediado se puede desarrollar en serie. Escribiremos
x = x0 + x1 + s 2 + . . .
donde x0 = y
377
Perturbación, promediado y perturbación singular
Ahora bien
ẋ = ẏ + ė
= f (x, t, )
h
i
= f¯(y) + f (y + e, t, ) − f¯(y)
De donde el error e verifica:
h
ė = f (y(t) + e, t, ) − f¯(y(t))
i
378
Perturbación, promediado y perturbación singular
Esto sugiere la ecuación promediada:
Z
i
1 Th
f¯(x1)
ẋ1 = f (y + x1, t, ) − f¯(y) dt = ¯
T 0
Como el integrando es de orden , x1 es de
orden 2.
379
Perturbación, promediado y perturbación singular
El ejemplo clásico es perturbación de la órbita
de un planeta debida a perturbaciones de otros
cuerpos. Otro ejemplo (dedicado a los inteligentes):
La Tierra no es exactamente esférica. Por lo
tanto, el potencial gravitatorio es:
∞
X 1
µ
z
V =−
1−
J
P
(
n n )
n
r
r
n=2 r
donde Pn son polinomios de Legendre.
380
Perturbación, promediado y perturbación singular
En el caso de la Tierra:
J2 = 1.1 × 10−3
J3 = −2.3 × 10−6
J4 = −1.7 × 10−6
381
Perturbación, promediado y perturbación singular
La ecuación del movimiento es:
r̈ = −∇ −
∞
X
µ
z
− ∇
JnPn( )
r
r
n=2
El problema
mu
r̈ = ∇
r
es integrable (orbitas elı́pticas). Sea r0(t) su
solución. Luego, para s = r − r0.
s̈ = −
∞
X
n=2
JnPn(
sz + z0(t)
)
s + r(t)
382
Perturbación, promediado y perturbación singular
El sistema promediado es:
∞
X
T
X
sz + z0(t)
dt =
s̈ = −
JnP̄n
Jn
Pn(
s + r(t)
0
0
n=2
Z T
383
Perturbación, promediado y perturbación singular
Supongamos que se conoce la orbita s por
medición. Entonces el cálculo de los Jn es un
mero problema de estimación lineal.
En la práctica, las cosas se complican un poco.
Hace falta promediado en diversos órdenes y
consideración de otras influencias. Pero esta
es la idea.
384
Perturbación, promediado y perturbación singular
Por ejemplo:
385
Perturbación, promediado y perturbación singular
En muchos problemas existen sistemas en los
que hay varias escalas de tiempos muy separadas. Tales sistemas se pueden analizar mediante el método de perturbación singular.
386
Perturbación, promediado y perturbación singular
La forma estándar de escribir estos sistemas es
como:
ẋ = f (t, x, z, )
ż = g(t, x, z, )
387
Perturbación, promediado y perturbación singular
Una primera aproximación es hacer = 0
ẋ = f (t, x, z, 0)
0 = g(t, x, z, 0)
De la segunda ecuación se obtiene:
z = h(x, t)
De donde
ẋ = f (t, x, h(x, t), 0)
388
Perturbación, promediado y perturbación singular
Denotemos la solución de esta ecuación, con
condición inicial ζ0, por x̄(t). Sea entones:
z̄(t) = h(t, x̄(t))
Claramente, z̄(0) = h(0, ζ0).
389
Perturbación, promediado y perturbación singular
Como la condición inicial de z no tiene porque
verificar esta condición, lo mejor que tenemos
derecho a esperar es que, tras un cierto tiempo
de orden se verifique
x(t, ) − x̄(t) = O()
z(t, ) − z̄(t) = O()
390
Perturbación, promediado y perturbación singular
Analizemos el comportamiento del sistema en
término de x y del “error” y = z − h(x, t)
ẋ = f (t, x, y + h(x, t), )
x(0) = ζ()
ẏ = g(t, x, y + h(x, t), ) − ∂h
−
∂t
∂h
f (t, x, y + h(x, t), )
∂x
y(0) = η() − h(0, ζ())
391
Perturbación, promediado y perturbación singular
Itroduzcamos un nuevo tiempo τ = 1 t. Entonces:
∂y
∂h
= g(t, x, y + h(x, t), ) − −
∂τ
∂t
∂h
f (t, x, y + h(x, t), )
∂x
y(0) = η() − h(0, ζ())
En el lı́mite → 0 se tiene que t → 0 y x(t) →
ζ0.
392
Perturbación, promediado y perturbación singular
Por lo tanto
∂y
= g(t, ζ0, y + h(ζ0, 0), 0)
∂τ
y(0) = η0 − h(0, ζ0)
Por supuesto, esta ecuación tiene un equilibrio
para y = 0.
393
Perturbación, promediado y perturbación singular
Particularicemos ahora al caso de un sistema
autónomo:
ẋ = f (x, z, )
ż = g(x, z, )
Para = 0 se reduce a:
ẋ = f (x, z, 0)
0 = g(x, z, 0)
394
Perturbación, promediado y perturbación singular
Es claro que para este sistema, el espacio definido
por la ecuación z = h(x) es invariante.
Pregunta: ¿Existe un espacio invariante análogo
para > 0?
Respuesta: Sı́, el espacio lento.
395
Perturbación, promediado y perturbación singular
Busquemos un espacio invariante de la forma
z = H(x, )
La condición de invarianza es:
z(0, ) − H(x(0, ), ) = 0 ⇒ z(t, ) − H(x(t, ), )
396
Perturbación, promediado y perturbación singular
Tomando dos puntos infinitamente próximos:
0 = g(x, z, ) − ∂H
f (x, H(x, ))
∂x
Esta ecuación, la condición del espacio, se puede
resolver perturbativamente en .
397
Perturbación, promediado y perturbación singular
En efecto, para = 0 se tiene que
H(x, 0) = h(x) = H0(x)
Escribamos
H(x, ) = H0(x) + H1(x) + 2H2(x) + . . .
Substituyendo esto en la condición del espacio
e identificando coeficientes de n se resuelve el
problema.
398
Perturbación, promediado y perturbación singular
Para n = 1:
∂g
∂H0
(x, H0(x))H1(x) =
f (x, H0(x))
∂z
∂x
Y ası́ sucesivamente
399
Perturbación, promediado y perturbación singular
Examinemos ahora el sistema en escala τ . Tenemos:
dz
= g(x(τ ), z)
dτ
Cuando → 0 se tiene:
dz
= g(x(0), z)
dτ
400
Perturbación, promediado y perturbación singular
Ası́ pues, el espacio x = x0 es un invariante
para = 0. Haciéndonos la misma pregunta
que antes llegamos a buscar un espacio invariante ∀:
x = F (z, ) = F0(z) + F1(z) + 2F2(z) + . . .
Claramente F0(z) = x0.
401
Perturbación, promediado y perturbación singular
Este espacio rápido ha de verificar:
x(0, )−F (z(0), ) = 0 ⇒ x(τ, )−F (z(τ ), ) = 0
Comparando dos puntos infinitamente próximos:
∂F
f (F (z, ), z) −
g(F (z, ), z) = 0
∂z
Y se procede como antes.
402
Perturbación, promediado y perturbación singular
Ejemplo:
Sea el sistema
ẋ = −x + z
ż = tan−1(1 − z − x)
403
Perturbación, promediado y perturbación singular
Espacio de estado para = 0:
404
Perturbación, promediado y perturbación singular
Espacio de estado para = 0, 1:
405
Perturbación, promediado y perturbación singular
Supongamos ahora que existe un punto de equilibrio en estos sistemas singulares, que podemos
tomar en (x, z) = (0, 0).
Escribamos las ecuaciones de la forma:
ẋ = f (x, y + h(x))
∂h
ẏ = g(x, y + h(x)) − f (x, y + h(x))
∂x
406
Perturbación, promediado y perturbación singular
Se demuestra que si:
1. Las derivadas primeras y segundas de f , g
y h están acotadas.
2. Los autovalores de
∂f (x, h(x)) ∂x
x=0
son estrictamente estables.
3. Los autovalores λi de
∂g(x, y + h(x))
∂y
verifican
Real λi ≤ ci < 0 ∀x ∈ [−x0, x0]
El sistema es estable a pequeña señal.
407
Perturbación, promediado y perturbación singular
Por ejemplo, consideremos el sistema:
ẋ = f (x, v)
ż = Az + Bu
v = Cz
u = γ(x)
Esto representa una planta no lineal f y un
control mucho más rápido que la planta oon
estado z.
408
Perturbación, promediado y perturbación singular
Esta ecuación se puede poner como:
ẋ = f (x, Cz)
ż = Az + Bγ(x)
Suponemos que (0, 0) es un equilibrio. Además:
h(x) = −A−1Bγ(x)
409
Perturbación, promediado y perturbación singular
Por el teorema anterior el sistema es estable a
pequeña señal si:
−1 ∂γ es Hurwitz.
1. Si ∂f
−
CA
∂x
∂x
2. Si A es Hurwitz.
En conclusión, si A es Hurwitz se puede uno
olvidar de la dinámica del regulador.
410
Perturbación, promediado y perturbación singular
Consideremos ahora un sistema dependiente
de un parámetro:
ẋ = f (x, z, µ)
ż = g(x, z, µ)
El sistema lento es:
ẋ = f (x, z, µ)
0 = g(x, z, µ)
411
Perturbación, promediado y perturbación singular
Conforme varı́a µ tendremos una sucesión de
puntos de equilibrio:
(x, z)∗ = (x(µ), z(µ))∗
La linealización del sistema lento da el jacobiano:
fx − fz gz−1gx
412
Perturbación, promediado y perturbación singular
Es posible que para algún µ, gz se vuelva singular. Esto implica que aparece un autovalor
infinito en la dinámica lenta.
Cuando se considera toda la dinámica, debe
aparecer una inestabilidad. Como se trata de
una bifurcación de codimensión 1, ha de ser
silla-nodo o Hopf. Como no hay pérdida de
solución estática ha de ser Hopf.
Esto se llama bifurcación causal.
413
Perturbación, promediado y perturbación singular
La situación:
414
Perturbación, promediado y perturbación singular
Los autovectores del autoanálisis generalizado
de:
"
I 0
0 0
# "
,
fx fz
gx gz
#!
proporcionan información sobre la dinámica rápida
implicada.
415
Perturbación, promediado y perturbación singular
En ocasiones, puede ocurrir algo parecido durante la evolución dinámica de un sistema. En
efecto, si consideramos una integración de Euler,
se tiene que:
xk+1 = xk + f (xk , zk )∆t
−1
zk+1 = zk − gz (xk , zk )gx(xk , zk ) xk+1 − xk
Es claro que si gz es singular, esto no sirve.
416
Perturbación, promediado y perturbación singular
Estos puntos se llama puntos de impasse. En
ellos, es preciso considerar la dinámica rápida
(por ejemplo, mediante los espacios rápidos)
para saber que ocurre exactamente.
417
Perturbación, promediado y perturbación singular
Por ejemplo, se el circuito:
418
Perturbación, promediado y perturbación singular
La variabale lenta es v. La rápida podrı́a ser
i. La evolución tiene lugar en el espacio lento
hasta llegar al punto de impasse, en cuyo momento pasa al espacio rápido:
419
Bifurcaciones locales de sistemas en tiempo discreto
Consideremos un sistema discreto:
xk+1 = f (xk , µ)
420
Bifurcaciones locales de sistemas en tiempo discreto
Un punto de equilibrio (x∗, µ∗) verifica:
x∗ = f (x∗, µ∗)
421
Bifurcaciones locales de sistemas en tiempo discreto
La estabilidad de este punto de equilibrio se
puede analizar estudiando la derivada fx. La
condición de estabilidad es:
Todos los autovalores de fx deben estar dentro
del cı́rculo unidad.
422
Bifurcaciones locales de sistemas en tiempo discreto
Al cambiar µ existe la posibilidad de que algún
autovalor se vuelva inestable. Esto puede suceder
de tres formas:
• Un autovalor alcanza 1: silla-nodo.
• Un par de autovalores imaginarios cruzan
el cı́rculo unidad: Hopf.
• Un autovalor alcanza -1: flip, doble periodo o subarmónica
423
Bifurcaciones locales de sistemas en tiempo discreto
Consideremos la bifurcación silla-nodo. El punto
de equilibrio verifica:
f (x∗, µ∗) − x∗ = F (x∗, µ∗) = 0
Linealizando:
(fx − I)∆x = Fx∆x = 0
424
Bifurcaciones locales de sistemas en tiempo discreto
El autoanálisis de fx:
fx = W ΛV W V = I
Luego
Fx = fx − I = W (Λ − I)V
Ası́ pues, un atovalor 1 en fx implica un autovalor nulo en Fx
425
Bifurcaciones locales de sistemas en tiempo discreto
Pero F es un sistema de ecuaciones estáticas.
Un autovalor nulo implica genéricamente que
la solución desaparece al unirse con otro punto
de equilibrio. La situación es análoga a la
del sistema continuo y se analiza de la misma
forma: desarrollo de los términos hasta segundo orden y sustitucion de x por algo en
la dirección del autovector derecho v.
426
Bifurcaciones locales de sistemas en tiempo discreto
Consideremos ahora el caso de que aparecen
dos autovalores conjugados complejos.
La teorı́a se puede desarrollar forma análoga a
la del caso de ecuaciones continuas. En particular los conceptos del espacio central y de
transformaciones de Poincaré tienen todavı́a
sentido.
427
Bifurcaciones locales de sistemas en tiempo discreto
Sin embargo, la aplicación de la reducción de
Poincaré en este caso tiene alguna sorpresa.
Hagamos una derivación heurı́stica de la razón
de estas sorpresas.
Consideremos el sistema discreto
xk+1 = fd(xk )
como la versión muestreada, con tiempo de
muestreo T , de
ẋ = fc(x)
428
Bifurcaciones locales de sistemas en tiempo discreto
Supongamos que 0 es un punto de equilibrio
del sistema discreto. Entonces también lo es
del continuo. Cerca del equilibrio, y suspuesto
hecho el cambio de variables dado por los autovectores, las linealizaciones son:
xk+1 = Λdxk
ẋ = Λcx
429
Bifurcaciones locales de sistemas en tiempo discreto
Si el sistema discreto viene de la linealización
del continuo, se debe tener:
exp(ΛcT ) = Λd
430
Bifurcaciones locales de sistemas en tiempo discreto
Por otra parte, la condición para la eliminación
a
de Poincaré de los términos x11 . . . xann era que:
λi −
X
aj λj 6= 0
T λi −
X
aj T λj 6= 0
O
Si he reducido al espacio central, puedo considerar un sistema de 2 dimensiones.
431
Bifurcaciones locales de sistemas en tiempo discreto
Los autovalores del sistema discreto son de
la forma exp(±2πiθ). Como Λd = exp(Λc) se
tiene que 2πiθ = λc (mod1) y
±θ 6= a1θ − a2θ (mod1)
432
Bifurcaciones locales de sistemas en tiempo discreto
Consideremos el caso en que θ es irracional.
Entonces, la ecuación anterior mo puede verificarse nunca, y todos los términos del cuarto
en adelante pueden eliminarse. El sistema se
puede reducir, por tanto, a:
rk+1 = rk (1 + d(µ − µ0) + ark2)
φk+1 = φk + θ + brk2
Por supuesto, la bifurcación puede ser sub o
supercrı́tica.
433
Bifurcaciones locales de sistemas en tiempo discreto
Si θ es racional la ecuación de eliminación tiene
solución y habrá términos que no pueden ser
eliminados. Sin embargo, en general estos términos
serán de orden elevado y no causarán problemas.
1.
Excepciones son θ = ± 1
o
θ
=
±
3
4
434
Bifurcaciones locales de sistemas en tiempo discreto
En efecto, para el caso θ = 1
3 , la ecuación
tiene solución para a1 = 0 y a1 = 2. Es decir,
no todos los términos cuadráticos pueden ser
eliminados.
Para θ = 1
4 hay solución si a1 = 0 y a2 = 3. Es
decir, hay términos cúbicos que no pueden ser
eliminados.
Como en la expresión de la bifurcación de Hopf
aparecen términos hasta el tercero, estos casos
son especiales.
435
Bifurcaciones locales de sistemas en tiempo discreto
El método del balance armónico es también
aplicable, utilizando transformada z en vez de
transformada de Laplace.
436
Bifurcaciones locales de sistemas en tiempo discreto
Consideremos finalmente la bifurcación en flip,
cuando el autovalor cruza la circunferencia unidad
por −1.
Esta bifurcación no tiene análoga en sistemas
continuos.
437
Bifurcaciones locales de sistemas en tiempo discreto
Utilizando la aproximación del espacio central,
podemos reducir el sistema vectorial
xk+1 = f (xk , µ)
a un sistema escalar
xk+1 = f (xk , µ)
438
Bifurcaciones locales de sistemas en tiempo discreto
Si para µ = 0 hay un autovalor −1 se ha de
tener
f (x, 0) = −x + a1x2 + a2x3 + t.m.o.
La función f (x, 0) − x no tiene autovalores nulos. Ası́, pues, se ha de tener una solución
que pasa de ser de estable a inestable, pero no
aparecen ni desaparecen puntos de equilibrio.
439
Bifurcaciones locales de sistemas en tiempo discreto
Consideremos la composición de f consigo misma.
f ◦ f = f 2(x, 0)
= −(−x + a1x2 + a2x3) +
a1(−x + a1x2)2 + a3(−x)3 + . . .
3
= x − (2a2
2 + 2a3 )x + . . .
f 2(x, 0) − x tiene un autovalor nulo. Por lo
tanto pueden aparecer o desparecer soluciones.
Un momento de examen nos muestra que estamos ante una bifurcación en ”cúspide”.
440
Bifurcaciones locales de sistemas en tiempo discreto
Si f 2 tiene puntos de equilibrio que no lo son
de de f , han de ser órbitas de periodo 2. La
situación es pues:
441
Bifurcaciones locales de sistemas en tiempo discreto
Para calcular los parámetros de la bifurcación,
basta aplicar la reducción de Lyapunov-Schmidt
a la función f ◦f −x. Esto solo requiere derivadas
de este función, que se pueden obtener aplicando la regla de la cadena.
El método tiene un algebra algo pesada, pero
es fácil de aplicar numéricamente.
442
Bifurcaciones locales de sistemas en tiempo discreto
Considérese ahora una órbita periódica de un
sistema continuo x(t). Para analizar las propiedades
de estabilidad de esta órbita se puede introducir la llamada sección de Poincaré.
443
Bifurcaciones locales de sistemas en tiempo discreto
Es claro que la estabilidad de la órbita es la
misma que la de la aplicación de Poicaré. Por
tanto, los autovalores de esta función son los
mismos independientemente de la sección usada.
444
Bifurcaciones locales de sistemas en tiempo discreto
Analizemos la estabilidad de la órbita de otra
forma. Consideremos que la órbita x(t) es perturbada a x(t) + δ x(t). Substituyendo en la
ecuación diferencial se obtiene
d
δ x = fx(x(t))δ x
dt
445
Bifurcaciones locales de sistemas en tiempo discreto
Esta es una ecuación lineal dependiente del
tiempo. La matriz fx(x(t)) tiene periodo T .
Una solución general tiene la forma:
X(t) = Z(t) exp(tR) Z(0) = Z(T )
446
Bifurcaciones locales de sistemas en tiempo discreto
Si se escoge X(0) = Z(0) = I se tiene
X(t) = exp(tR)
Y por lo tanto la estabilidad de la órbita viene
dada por los autovalores de R (multiplicadores
de Flouquet). Hay un autovalor que vale 1,
y el resto son iguales a los autovalores de la
aplicación de Poincaré.
447
Bifurcaciones locales de sistemas en tiempo discreto
La estabilidad del ciclo lı́mite viene dada por
los autovalores de la aplicación de Poincaré.
Siendo un sistema discreto podrı́a, en principio, perder estabilidad mediante una bifurcación silla-nodo, Hopf o flip.
448
Bifurcaciones locales de sistemas en tiempo discreto
Una bifurcación silla-nodo implica una colisión
con otro ciclo lı́mite. Es raro (salvo en sistemas de dimensión 2). Implica que los ciclos
se tocan por todas partes a la vez.
449
Bifurcaciones locales de sistemas en tiempo discreto
La bifuracción de Hopf implica que el ciclo
lı́mite se parte, o se junta con, un toro invariante.
450
Bifurcaciones locales de sistemas en tiempo discreto
La bifurcación en flip esta asociada a una duplicación de periodo.
451
Bifurcaciones locales de sistemas en tiempo discreto
Consideremos ahora un tipo especial de aplicación discreta: la aplicación del cérculo:
θk+1 = f (θk ) θ ∈ S
452
Bifurcaciones locales de sistemas en tiempo discreto
Esta aplicación surge en un amplio campo de
circunstancias. Por ejemplo, cuando un ciclo
lémite se transforma en un toro invariante:
453
Bifurcaciones locales de sistemas en tiempo discreto
También cuando se tienen dos osciladores acoplados. El espacio de estado es S 1 × S 1: un toro.
Si se toma una sección de Poincaré se obtiene
un cérculo.
Por ejemplo, si los dos osciladores evolucionan
según:
φ = φ(t)
θ = θ(t)
puede definirse una sección de Poincaré tomando
los tk en los que φ(tk ) = 0 y
θk = θ(tk )
454
Bifurcaciones locales de sistemas en tiempo discreto
Consideremos primero el caso en el que los dos
osciladores están desacoplados. Se tiene entonces que
φ(t) = Ω1t ⇒ tk =
2π
k
Ω1
y
2πΩ2
θk+1 = Ω2T1 =
+ θk = ω + θk
Ω1
455
Bifurcaciones locales de sistemas en tiempo discreto
Por cierto, esto es lo que ocurre en un toro
invariante justo después de una bifurcación de
Hopf de un ciclo lémite.
456
Bifurcaciones locales de sistemas en tiempo discreto
Cuando los osciladores se acoplen el sistema
cambia a:
θk+1 = θk + ω + g(θk )
g es pequeña si los osciladores estan casi desacolplados. Puedo tomar esta ecuación módulo
1.
457
Bifurcaciones locales de sistemas en tiempo discreto
g es periódica con periodo 1, luego podemos
escribirla en serie de Fourier. Escogiendo adecuadamente el origen de ángulos puede eliminarse el término en cos. Luego:
g(θ) = g0 −
∞
X
k
sin(2πθ) +
2π
(ak sin(2kπθ) + bk cos(2kπθ))
2
458
Bifurcaciones locales de sistemas en tiempo discreto
El término g0 solo implica un cambio de la
frecuencia ω. Más interesante es el efecto de
la parte no lineal. El efecto dominante viene
del término en primer orden. Consideremos el
sistema dinámico:
k
θk+1 = θk + ω −
sin(2πθ)
2π
459
Bifurcaciones locales de sistemas en tiempo discreto
Como consecuencia de este término no lineal, desaparecen las órbitas cuasiperiódicas y
quedan las órbitas periódicas. La situación es:
460
Bifurcaciones locales de sistemas en tiempo discreto
Cada una de las resonancias se llama una lengua
de Arnold. Por ejemplo, consideremos la resonancia 1-1. En los lémte se ha de verificar:
θ∗ = θ∗ + ω −
k
sin(2πθ∗)
2π
df
∗
θ∗ = 1 − k cos(2πθ ) = 0
dθ
La últimna ecuación implica θ∗ = ± 1
4 . Substik .
tuyendo en la primera ω = ± 2π
461
Bifurcaciones locales de sistemas en tiempo discreto
Por ejemplo, consideremos el oscilador original
de van der Pol:
462
Bifurcaciones locales de sistemas en tiempo discreto
Aqué hay dos osciladores: el oscilador de relajación formado por el condensador y la lámpara
de Neón; y la fuente de alterna. El resultado:
463
Caos determinista
Consideremos un sistema discreto que pierde
estabilidad a través de una bifurcación flip:
xk+1 = f (xk , µ) − 1 ∈ ρ(fx)
464
Caos determinista
El caso arquetı́pico es la aplicación logı́stica:
xk+1 = µxk (1 − xk )
Si µ > 1, existe siempre un punto de equilibrio
x∗ = 1 − µ−1. Este punto es estable si mu < 3,
en cuyo momento sufre una bifurcación en flip.
465
Caos determinista
Tras la bifurcación, la aplicación f ◦ f = f 2
tiene un punto de equilibrio inestable y, si es
supercrı́tica, un punto de equilibrio estable.
Este punto de equilibrio estable de f 2 puede
sufrir una nueva bifurcación en flip supercrı́tica,
dando lugar a un ciclo lı́mite estable de priodo
dos de f 2, o de periodo 4 de f .
466
Caos determinista
Analogamente, f 4 puede sufrir un flip supercrı́tico,
dando lugar a un ciclo de periodo 8. En algunos casos esta secuencia continua hasta que
se alcanza un periodo ”infinito”.
467
Caos determinista
En el sistema logı́stico:
468
Caos determinista
El sistema logı́stico este punto se alcanza cuando
µ = 3, 569946 . . .. Analizemos el sistema para
µ = 4, donde parece tener un comportamiento
similar.
469
Caos determinista
El sistema es:
xk+1 = 4xk (1 − xk )
Escribamos x = sin2(θ). Esto es posible porque
x ∈ [0, 1]. Tenemos que
sin2(θk+1) = 4 sin2(θk )cos2(θk )
= sin2(2θk )
470
Caos determinista
Hemos demostrado que el sistema es equivalente a:
θk+1 = 2θk
xk = sin2(θk )
Luego basta con analizar el primer sistema dinámico.
471
Caos determinista
Si escribimos θ en binario
θ =, 0011101001110 . . .
vemos que el sistema dinámico es equivalente
a correr la coma. Por lo tanto, si conocemos θ
con n cifras, el sistema puede hacer cualquier
cosa a partir del la enésima iteración.
472
Caos determinista
Esta extrema sensibilidad a las condiciones iniciales es una carcterı́stica del caos.
Un atractor caótico es un atractor (un conjunto invariante al que tienden las trayectorias)
dentro del cual el sistema presenta sensibilidad
exponencial a las condiciones iniciales.
473
Caos determinista
La manera en que se ha llegado al caos en
este caso no depende, en cierto sentido, de la
forma precisa del sistema dinámico. Da igual
la función logı́stica, que un seno, que . . ..
Para ver esto, estudiemos el mapa logı́stico.
Las primeras bifurcaciones tienen lugar a µ = 3
(nacimiento del 2 ciclo lı́mite), y µ = 3, 44949 . . .
(nacimiento del 4 ciclo lı́mite).
474
Caos determinista
f y f 2 en µ = 2, 90 y µ = 3, 15:
475
Caos determinista
f 2 y f 4 en µ = 3, 42 y µ = 3, 48:
476
Caos determinista
Entre cada dos puntos de bifurcación n y n + 1
n
2
hay uno donde fx tiene de autovalor 0 (un
máximo o mı́nimo). Estos puntos se llaman
superestables. La notación es:
. . . µn < µ∗n < µn+1 . . .
477
Caos determinista
Comparemos f , f 2, f 4, en sus puntos superestables:
478
Caos determinista
Da la impresión que cada cuadrado es como
el anterior girado y reducido. gn es la función
dentro del cuadro en la iteración n, por lo que
tenemos un sistema dinámico. Cerca de la
aparición del caos, los valores µ se hacen esencialmente iguales a µ∞, por lo que gn viene
de la composición de gn−1. En el lı́mite esperamos:
g(x) = (−α)g(g(x/(−α)))
479
Caos determinista
Escribiendo g en serie de Taylor:
g = a 1 x 2 + a 2 x 4 + a 3 x6 + . . .
se puede substituir e identificar los coeficientes.
En particular se encuentra:
α = 2, 502907876 . . .
480
Caos determinista
La g ası́ calculada es un punto fijo del sistema
2 (x/ − α), que localmente coingn+1(x) = −αgn
k
cide con nuesto sistema definido por f 2 en los
puntos superestables (salvo que va al revés).
Por lo tanto, los autovalores de estos sistemas
han de coincidir.
El mayor autovalor de este sistema es:
λ = 4, 669201609 . . .
481
Caos determinista
λ indica a que velocidad cambia la función.
Pero si la función converge como λ−n, y como
es proporcional a µ∗n, mu∗ debe converger de
la misma forma. Luego
lim
µ∗n+1 − µ∗n
n←∞ µ∗
n+2 − νn+1
=λ
482
Caos determinista
En este razonamiento no se ha utilizado el hecho de que f fuera logı́stica, sino solo que se
tenı́a una secueencia de duplicación de periodo hasta el caos. Por lo tanto, el resultado
anterior vale para todas estas secuencias.
483
Caos determinista
Hay otras formas en que un sistema puede volverse caótico. Una de ellas es conocida como
intermitencia.
484
Caos determinista
Consideremos un sistema discreto que sufre
una bifurcación silla-nodo. Poco después de
la bifurcación se tiene la situación:
485
Caos determinista
Supongamos que hay algo que fuerza al sistema a volver por la izquierda una vez que
ha salido por la derecha. Dentro del cuello
la diferencia entre xn+1 y xn es pequeña y se
puede escribir:
dx
= x2 + µ
dn
La solución es:
x(n) =
√
√
µ tan( µ(n − n0))
486
Caos determinista
La situación es:
donde la dirección media de las ráfagas es proporcional a √1µ .
487
Caos determinista
El fenómeno de intermitencia surge porque un
sistema se acerca a las proximidades de un
punto de equilibrio que ya no lo es, pero donde,
no obstante, queda el recuerdo en la forma de
una dinámica lenta.
488
Caos determinista
Según el punto de equilibrio que se ha perdido
se distingue entre:
1. Intermitencia I: silla-nodo.
2. Intermitencia II: Hopf subcrı́tica.
3. Intermitencia III: flip subcrı́tica.
489
Caos determinista
Otra via al caos es cuando tras una bifurcación
de Hopf, un sistema discreto se mueve a la
región donde las lenguas de Arnold se solapan.
Esto se llama rotura del toro.
490
Caos determinista
Por ejemplo, el péndulo de van der Pol:
491
Caos determinista
Un atractor caótico es un conjunto sumamente
complejo cuya caracterización no es fácil. Existen uns serie de medidas para caracterizarlo.
492
Caos determinista
Una primera información la da el espectro del
sistema. Si es caótico esperamos que haya
muchas trayectorias no periódicas, que se ven
como gran energı́a en la parte baja del espectro.
493
Caos determinista
Por ejemplo, una transisción de un sistema de
un ciclo lı́mite a un estado caótico:
494
Caos determinista
Otra caracterı́stica importante son los exponentes de Lyapunov. Ellos nos dicen cómo de
rápido se separan dos trayectorias vecinas.
495
Caos determinista
Este es un número fácil de calcular. En efecto,
se tiene que, para dos puntos x e y
x(t + ∆t) = x(t) + f (x)∆t
y(t + ∆t) = y(t) + f (y)∆t
Luego:
w(t + ∆t) = w(t) + fxw∆t
o
dw
= fxw
dt
496
Caos determinista
Para t = 0 hagamos kw(0)k = 1. Integrando
numéricamente esta ecuación de t0 a t1 se obtiene que w habrá aumentado su modulo. Sea:
α1 = kw(t1)k
497
Caos determinista
Normalizemos ahora w(1) dividiendo por α1
y procedamos como antes. Obtenemos entonces una nieva constante α2. Iterando se
obtiene una serie de vectores unitarios y de
constantes αi. Si no hubierámos normalizado,
el módulo de w(n) serı́a
Y
α 1 α 2 . . . αn
Como w(t) ≈ w(0) exp(λt) se tiene:
n
1 X
λ(x) = lim
ln(αi)/Deltat
n→∞ n
i=1
498
Caos determinista
Si al mismo tiempo que calculo los αi me muevo
en la trayectoria obtengo el exponente de la
trayectoria. Si la trayectoria es densa en el
atractor, se obtiene el exponente del atractor.
499
Caos determinista
Otra medida interesante es la dimensión fractal
del atractor.
Consideremos un cuadrado en un espacio tridimensional. Si puedo cubrirlo con una bola 3D
de diámetro 1, necesitaré 4 de diémetro 0,5, 8
de diámetro 0,25, etc.
500
Caos determinista
Esto sugiere que si un conjunto dado requiere
N () bolas de tamaño , se define la dimensión
fractal como:
d = lim −
n→∞
ln N ()
ln 501
Caos determinista
Queda el tema de identificación de sistemas
caóticos. El caso estándar es cuando se parte
de una serie temporal de una variable escalar:
x = {x(1), x(2), x(3), . . .}
502
Caos determinista
Si esto proviniera de un atractor de dimensión
fractal entre n − 1 y n, las n primeras muestras
serı́an independientes y el resto se deberı́an
poder calcular a partir de ellas.
503
Caos determinista
En la práctica se determina la dimensión de
imersión (embedding), que es la dimensión del
espacio lineal generado por la serie. Esto se
hace con técnicas estándar.
504
Caos determinista
Una vez hecho esto se transforma la serie a las
coordenadas esenciales y se realizan, gráficamente
por ejemplo, proyecciones en 2 y 3 dimensiones.
Si el atractor es de dimensión pequeña, se
puede identificar.
505
Caos determinista
Por ejemplo, la reacción Belusov-Zhabotinski:
506
Sistemas hamiltonianos
Las ecuaciones de Hamilton son:
∂H
ṗ = −
∂q
∂H
q̇ =
∂p
siendo H(p, q) el hamiltoniano (la energı́a).
507
Sistemas hamiltonianos
Por ejemplo, en un péndulo:
p2
H=
− mgl cos q
2ml
y las ecuaciones de Hamilton:
ṗ = −mgl sin(q)
p
q̇ =
ml
que son las ecuaciones que cumplen el ángulo
y el momento cinético.
508
Sistemas hamiltonianos
A partir de las ecuaciones de Hamilton se tiene:
X ∂H dqi
∂H dpi
dH
=
−
=0
dt
∂pi dt
i ∂qi dt
Ası́ pues, la energı́a se conserva a lo largo de
la evolución del sistema. Es un invariante del
movimiento.
509
Sistemas hamiltonianos
Puede haber otros invariantes del movimiento.
Estan asociados a simetrı́as. Por ejemplo, en
tres dimesiones la descripción de un sistema
aislado no cambia si transladamos el sistema
de referenica. Esto implica la conservación del
momento.
510
Sistemas hamiltonianos
Por ejemplo, sea un sistema aislado de N partı́culas.
Se tiene que:
H = H(pi, qi)
Si desplazo todo una cantidad δ q el hamiltoniano no cambia:
N
X
∂H
δq
∂
q
i
i=1
X dpi
δq
= −
dt
= 0
δH =
Luego
N
X
pi = constante
i=1
511
Sistemas hamiltonianos
Se puede demostrar ası́ que cualquier función
conservada deriva de una simetrı́a. En efecto,
si se conserva una cantidad f (qi, pi) se tiene
que:
N
X
df
∂f dpi
∂f dqi
=
+
dt
∂q
dt
∂pi dt
i
i=1
N
X
∂f ∂H
∂f ∂H
=
−
∂q
∂p
∂pi ∂qi
i
i
i=1
512
Sistemas hamiltonianos
Ahora, esto se puede interpretar como el incremento que sufrirı́a el hamiltoniano si pi y qi
se incrementaran como:
∂f
δτ
∂qi
∂f
δqi =
δτ
∂pi
δpi = −
τ es algún parámetro. Integrando las ecuaciones tenemos la simetrı́a.
513
Sistemas hamiltonianos
Por ejemplo, en el caso del momento lineal
total (en 1D, para simplificar):
f =
N
X
pi
i=1
Las ecuaciones son
δpi = 0 × δτ
δqi = δτ
Su solución es:
pi = pi(0) qi = qi(0) + τ
No cambiar los momentos y mover lo mismo
todas las coordenadas.
514
Sistemas hamiltonianos
En sistemas aislados, el espacio presenta 6 simetrı́as:
3 translaciones y 3 rotacionales. Sus cantidades conservadas son los momentos lineales
y cinéticos. En general no hay más.
515
Sistemas hamiltonianos
Pero si solo hay 7 cantidades conservadas, esto
implica que el sistema debe vagabundear por
toda la superficie del espacio de estado definida
por estas 7 constantes.
Como cada partı́cula aporta 6 dimensiones al
espacio de estado, la trayectoria ha de estar
contenida en una superficie de dimensión 6N −
7 como mucho.
516
Sistemas hamiltonianos
Por ejemplo, dos partı́culas que se atraen con
una fuerza central no coulombiana:
517
Sistemas hamiltonianos
Los sistemas hamiltonianos tienen la propiedad
de que, en la evolución, se conserva el volumen
en el espacio de fases.
Consideremos un sistema dinámico
ẋ = f (x)
y un paralelepı́pedo (un cubito torcido) en el
espacio de estado de estado:
518
Sistemas hamiltonianos
Para ver lo que le pasa al cubito consideremos la evolución de 2 esquinas próximas x(0)
y x(0) + l(0), siendo l pequeño:
x(dt) = x(0) + f (x(0))dt
(x + l)(dt)+ = x(0) + l(0) + f (x(0) + l(0))dt
= x(0) + dx(0) +
f (x(0))dt + fx(0)l(0)dt
Dicho de otra forma:
l(t) = l(0) + fxl(0)dt
519
Sistemas hamiltonianos
Supongamos que nuestro cubo tiene los lados,
todos de longitud l, en las direcciones de los n
autovectores de fx. Entonces, para el lado i:
dli = λildt
N se tiene
Como el volumen es V (0) = ΠN
l
=
l
i
i
que
dV =
N X
dliΠj6=ilj
i=1
520
Sistemas hamiltonianos
Ası́ pues:
dV
N
X
dli N
Πj=1lj
i=1 li
N X
λildt
V
=
l
i=1
=
= V
N
X
!
λidt
i=1
= V traza(fx)dt
o
dV
= traza(fx)dt
V
de donde
V (∆T ) ≈ V (0) exp(traza(fx)∆T )
521
Sistemas hamiltonianos
Si un sistema tiene un atractor debe tener la
traza de fx negativa, ya que al converger las
trayectorias al atractor se juntan todas.
Un sistema en el que traza(fx) < 0 en todo el
espacio se llama disipativo. Si fuera igual a 0
es conservativo.
522
Sistemas hamiltonianos
En el caso de un sistema hamiltoniano se tiene
bf f (x
− ∂H
∂q
=
∂H
∂p
Por tanto
∂ 2H
− ∂q∂p
0
fx = ∂ 2H
0
∂q∂p
y traza(fx) = 0.
523
Sistemas hamiltonianos
Ası́ pues, un sistema hamiltoniano es un sistema que no puede tener, en rigor, atractores.
Consideremos cambios de coordenadas:
P = P (p, q)
Q = Q(p, q)
Un cambio ası́ se dice canónico si las ecuaciones dinámicas resultantes son también hamiltonianas:
∂K(P, Q)
Ṗ = −
∂Q
∂K(P, Q)
Q̇ =
∂P
524
Sistemas hamiltonianos
Supongamos que tengo un sistema hamiltoniano con N coordenadas y N momentos y encuentro una transformación canónica tal que
K = K(Pi)
Ṗi = 0
∂K
Q̇i =
∂Pi
La solución de estas ecuaciones es inmediata:
Pi = constante
∂K
Qi =
t + Q0
i
∂Pi
525
Sistemas hamiltonianos
Un sistema de este tipo se llama integrable.
La notación más habitual es:
Pi = Ji
Qi = θi
∂K
= ωi(J)
∂Pi
J se llama la acción y θ el añgulo.
526
Sistemas hamiltonianos
Si un sistema es integrable su trayectoria yace
en un toro de dimensión N , si la órbita está
acotada (hay N constantes Ji del movimiento).
527
Sistemas hamiltonianos
Por ejemplo, consideremos de nuevo el péndulo:
ω02q 2
p2
H(p, q) =
+
2
2
Con el cambio de variables (hay que comprobar
que es canónico):
s
q =
2J
cos θ
ω0
q
p = − 2Jω0 sin θ
se obtiene
H = Jω0
528
Sistemas hamiltonianos
529
Sistemas hamiltonianos
El nombre de integrables viene porque todos
los sistemas que lo son en la práctica (con el
significado normal de la palabra) lo son de este
tipo.
Caso tı́picos en mecánica celeste (o estabilidad
transitoria).
530
Sistemas hamiltonianos
En general, los hamiltonianos no son integrables.
Pero uchas veces no estan lejos de serlo. Sea
entonces un sistema no integrable tal que
∂H0
+ f
∂q
∂H0
q̇ =
+ g
∂p
ṗ = −
donde H0 es integrable.
531
Sistemas hamiltonianos
La manera más eficiente es transformar el sistema a coordenadas acción-ángulo:
J˙ = f (J, θ)
θ̇ = ω(J) + g(J, θ)
Y aplicar promediado:
J = J0 + J1(t)
θ = ω(J0)t + θ1(t)
¯0 )
J˙1 = f (J
¯0)
θ˙1 = g(J
como promediado de primer orden. Naturalmente se puede seguir. Estos métodos dan
aproximaciones numéricas extremadamente rápidas.
532
Sistemas hamiltonianos
Debido al carácter conservativo de las ecuaciones de Hamilton, es relativamente fácil de
encontrar, en sistemas integrables, trayectorias
homoclı́nicas.
Por ejemplo, el diagrama de fases del péndulo
no lineal:
p2
H=
− B cos q
2I
533
Sistemas hamiltonianos
Suongamos que tenemos otros osciladores (otros
grados de libertad del hamiltoniano total, por
ejemplo) que estan desacoplados de la dinámica
anterior. No obstante, podemos usar su fase
para obtener un mapa de Poincaré del sistema
anterior, que tendrá la misma pinta.
534
Sistemas hamiltonianos
Cualquier perturbación (un pequeño acoplamiento
entre grados de libertad, por ejemplo) destroza
la conexión homoclı́nica . . .
535
Sistemas hamiltonianos
. . . obteniendo la ”madeja” homclı́nica. En
efecto, si las dos ramas se intersectan una vez,
han de cortarse infinitas.
536
Sistemas hamiltonianos
Nótese que en el caso de que nos encontremos
con una madeja homoclı́nica, debemos tener
trayectorias que convergen o divergen del punto
estable tras un número arbitrario de oscilaciones.
537
Sistemas hamiltonianos
En el caso de dos dimensiones existe un método,
llamado el método de Melkinov que permite establecer si una perturbación dada nos creará o
no una madeja homoclı́nica.
538
Sistemas hamiltonianos
Sea
ẋ = f0(x)
un sistema con una órbita homoclı́nica x̄(t).
Sea el sistema perturbado
ẋ = f0(x) + f1(x(t), t, )
539
Sistemas hamiltonianos
Se define la integral de Melnikov como:
∆1(t) = −
Z ∞
∞
f0(x̄(τ )) ∧ f1(x̄(τ ), τ − t, 0)
Z τ
∂f
exp −
Tr 0 (x̄(σ))dσ dτ
∂x
0
Si f1 es periódica en su segundo argumento,
también lo es ∆1. ∧ es el producto vectorial.
540
Sistemas hamiltonianos
Entonces, si
1. ∆1(t) 6= 0 ∀t. Entonces, no existe madeja
homoclı́nica.
2. ∃t1∆1(t1) = 0y∆1´(t1) 6= 0. Entonces existe madeja homoclı́nica.
Nótese que la existencia de madeja homoclı́nica
lleva a la existencia de dominios de atracción
fractales.
541
Sistemas hamiltonianos
Consideremos finalmente perturbaciones hamiltonianas de sistemas hamiltonianos. Si el sistema es integrable, podemos obtener transformaciones de Poincaré de la forma:
Jn+1 = Jn
θn+1 = θn + ω(Jn)
El mapa de Poincaré se ha tomado considerando,
por supuesto, la fase de otro grado de libertad
del Hamiltoniano.
542
Sistemas hamiltonianos
Una gráfica de la transformación:
Algunas de estas superficies seran racionales
(giran un ángulo racional) y otras irracionales.
543
Sistemas hamiltonianos
Si se acoplan los dos osciladores, podremos
analizar la dinámica mediante teorı́a de perturbaciones. Ahora bien, si hemos escogida una
superficie racional, acabaremos encontrando problemas cuando avancemos en el orden de perturbación.
Esto es similar a las resonancias que nos encontrábamos en el primer método de Lyapunov.
544
Sistemas hamiltonianos
Se demuestra ası́ que las superficies racionales
no son estables. Otra cosa son las irracionales,
que si son lo bastante irracionales, se preservan (superficies KAM). Esta es la esencia del
teorema KAM.
545
Sistemas hamiltonianos
Esto tiene algunas curiosas consecuencias. Supongamos que tenemos dos superficies KAM entre una superficie racional de periodo p. Trás
perturbación, las superficies KAM permanecen
(más o menos distorsionadas).
546
Sistemas hamiltonianos
Entre las dos curvas KAM debe seguir habiendo puntos de periodo p. Estos ya no estan
en una superficie invariante, sino en la superficie 1. Tras la aplicación de la transformación
de Poincaré pasarán a la curva 2. Como el
sistema es conservativo, el área entre las dos
curvas debe ser igual, luego han de cortarse en
al menos dos puntos invariantes.
547