Unidad 3 - Departamento de Matemática
Anuncio

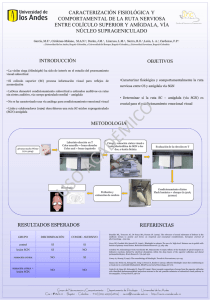
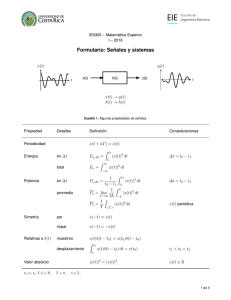
Geometría Diferencial - Unidad 3 Fabián Levis - Julio C. Barros Departamento de Matemática. Facultad de Ciencias Exactas Físico-Químicas y Naturales. UNRC Abstract En la presente unidad se verá que toda Isometría del espacio euclídeo se puede expresar de forma única como la composición de una transformación ortogonal con una traslación. De este resultado se desprende que el mapa de derivadas de una isometría, en cada punto es en esencia la matriz de su parte ortogonal. Se probará que existe una única isometría que transforma un sistema de referencia dado en otro. Se de…nirá la congruencia de curvas, y se demostrará que la curvatua y la torsión constituyen una condición necesaria y su…ciente para que dos curvas dadas sean congruentes. Temas:Isometrías. El mapa de derivadas de una isometría. Orientación. Congruencia de curvas. 1 Isometrías en R3 De…nition 1 Una isometría de R3 es un mapeo F : R3 ! R3 tal que, d (F (p) ; F (q)) = d (p; q) ; 8p; q 2 R3 Es decir las isometrías conservan la distancia. Example 2 Los siguientes ejemplos son de fundamental importancia para caracterizar las isometrías de R3 . a) Traslaciones: T (p) = p + a; a 2 R3 f ijo b) Rotación en torno a uno de los ejes coordenados: 0 10 1 cos sin 0 p1 C (p) = @ sin cos 0 A @ p2 A 0 0 1 p3 1 Rotación en torno al eje z Lemma 3 Si F y G son isometrías de R3 entonces, el mapeo GF es una isometría de R3 . Proof. Al ser F y G isometrías de R3 entonces, d (GF (p) ; GF (q)) = dG (F (p)) ; G (F (q)) = d (F (p) ; F (q)) = d (p; q) ; 8p; q 2 R3 Por lo tanto GF conserva las distancias y por ende es una isometría Lemma 4 Para las traslaciones de R3 se cumple: a) Si S y T son traslaciones entonces, ST = T S es traslación. b) Si T es traslación en a entonces, existe T 1 y es traslación en a. c) Dados p; q 2 R3 entonces, existe una única traslación T tal que T (p) = q. Proof. a) Puesto que S y T son traslaciones, existen a; b 2 R3 tales que, S (p) = p + a y T (p) = p + b entonces, ST (p) = T S (p) = p + (a + b) ; 8p 2 R3 y resulta una traslación de R3 . 2 b) Sea T (p) = p + a entonces, S (p) = p a satisface, ST = T S = I Es decir existe T 1 = S y es una traslación en a. c) Sea T (u) = u + q p entonces, T (p) = q. Si G es una traslación tal que G (p) = q entonces, por ser G traslación se tiene, G (v) = v + a por lo que se está suponiendo, G (p) = p + a = q de dónde se concluye que a = q p y por lo tanto T = G Remark 5 La rotación del ejemplo 2-b es un caso de transformación ortogonal de R3 , es decir una transformación lineal C : R3 ! R3 que conserva el producto escalar en el siguiente sentido: C (p) C (q) = p q; 8p; q 2 R3 Lemma 6 Si C : R3 ! R3 es una transformación ortogonal de R3 entonces, C es una isometría de R3 . Proof. Veamos que C conserva las normas: kC (p)k2 = C (p) C (p) = p p = kpk2 ; 8p 2 R3 Al ser C lineal se concluye que: d (C (p) ; C (q)) = kC (p) C (q)k = kC (p q)k = kp qk ; 8p; q 2 R3 Esto dice que C es una isometría Lemma 7 Si F es una isometría de R3 tal que, F (0) = 0 entonces, F es una transformación ortogonal. Proof. Veamos que F conserva el producto escalar, para ello, kF (p)k = d (0; F (p)) = d (F (0) ; F (p)) = d (0; p) = kpk De dónde se concluye que F conserva normas. Puesto que kF (p) F (q)) = d (p; q) = kp F (q)k = d (F (p) qk Entonces, (F (p) F (q)) (F (p) F (q)) = (p 3 q) (p q) de dónde, kF (p)k2 2F (p) F (q) + kF (q)k2 = kpk2 2p q + kqk2 Los términos que consisten en normas se cancelan, por lo tanto, F (p) F (q) = p q Por otra parte si U1 ; U2 ; U3 son los puntos unitarios (1; 0; 0) ; (0; 1; 0) y (0; 0; 1) respectivamente, entonces, p = (p1 ; p2 ; p3 ) = 3 X p i Ui i=1 Como U1 ; U2 ; U3 son ortonormales, es decir Ui Uj = ij , se tiene que, F (U1 ) ; F (U2 ) ; F (U3 ) son ortonormales puesto que F conserva el producto escalar, luego, F (p) = 3 X (F (p) F (Ui )) F (Ui ) = i=1 3 X (p Ui ) F (Ui ) = i=1 3 X pi F (Ui ) i=1 Se deja como ejercicio comprobar por medio de esta identidad la linealidad de F Theorem 8 Si F es una isometría de R3 entonces, existe una única traslación T y una única transformación ortogonal C tales que, F = T C Proof. Sea T la traslación en F (0) por el Lema (4) T 1 es una traslación en F (0). Por el Lema (3) T 1 F es una isometría y además se veri…ca: T 1 F (0) = T 1 (F (0)) = F (0) F (0) = 0 En consecuencia por el Lema (7) T 1 F es una transformación ortogonal, sea C = T 1 F ) F = T C Para ver la unicidad supongamos que F = T C entonces, T C = T C en consecuencia, C = T 1 T C , por ser C y C transformaciones lineales, se tiene, T 1 T (0) = 0. Debido a que T 1 T es una traslación se concluye que T 1 T = I de donde, T = T Remark 9 Si C es una transformación ortogonal entonces, C = (cij ) asociada a C es ortogonal, es decir, C 1 = C t . Por lo tanto la ecuación F (p) = q queda escrita en forma matricial como: 0 10 1 0 1 0 1 c11 c12 c13 p1 a1 q1 @ c21 c22 c23 A @ p2 A + @ a2 A = @ q2 A c31 c32 c33 p3 a3 q3 4 2 El Mapa de derivadas de una Isometría Theorem 10 Sea F una isometría de R3 con parte ortogonal C entonces, F (vp ) = (Cv)F (p) ; 8vp 2 Tp R3 Proof. Al ser C la parte ortogonal de F por el teorema anterior existe a 2 R3 tal que F (p) = a+C (p) (pues toda isometría es la composición de una traslación con una transformación ortogonal). Por de…nición F (vp ) es la velocidad inicial de la curva (t) = F (p + tv), desarrollando esta última igualdad obtenemos, (t) = F (p + tv) = a + C (p + tv) = a + C (p) + tC (v) (t) = F (p) + tC (v) Entonces, 0 (0) = (C (v))F (p) = F (vp ) Un esquema del resultado del teorema es el siguiente Mapa de derivadas de una isometría Remark 11 Al expresar en términos de coordenadas euclídeas, el resultado del teorema resulta, ! 3 X X F v j Uj = cij vj Uei j=1 i;j Donde C = (cij ) es la matriz asociada a la parte ortogonal C de la isometría F y si Uj se evalua en p entonces Uei se evalua en F (p). 5 Corollary 12 Las isometrías conservan el producto escalar de vectores tangentes. Si vp y wp son vectores tangentes a R3 en p y F es una isometría entonces, F (vp ) F (wp ) = vp wp Proof. Sea C la parte ortogonal de F entonces, F (vp ) F (wp ) = (C (v))F (p) (C (v))F (p) = Cv Cw = v w = vp wp Remark 13 Puesto que el producto escalare se conserva entonces, a) kF (vp )k = kvk b) Si v w = 0 ) F (vp ) F (wp ) = 0 c) Si fei g3i=1 es un sistema de referencia en p entonces, fF (ei )g3i=1 es un sistema de referencia en F (p) n o3 n o3 Theorem 14 Si (ei )p y (fi )q son sistemas de referencia en i=1 i=1 p y q respectivamente. Entonces, existe una única isometría F tal que F (ei )p = (fi )q para i = 1; 2; 3 Proof. Sea C la única transformación lineal tal que C (ei ) = fi para i = 1; 2; 3, se comprueba que C así de…nida es ortogonal. Sea T la traslación T (v) = v + q C (p). De…niendo la isometría F = T C satisface, F (p) = q y por el Teorema (10) se veri…ca, F (ei )p = (C (ei ))F (p) = (fi )q ; i = 1; 2; 3 Para ver la unicidad, observemos que por el Teorema (10) esta elección de C es la única posible para la parte ortogonal de F . Por otra parte, la traslación está completamente determinada, puesto que debe transformar el punto C (p) en q. De esta manera F = T C está determinada forma única Remark 15 Si ei = (ai1 ; ai2 ; ai3 ) y fi = (bi1 ; bi2 ; bi3 ) para i = 1; 2; 3 entonces, las matrices ortogonales A = (aij ) y B = (bij ) son las matrices n o3 n o3 de disposición de los sistemas de referencia: (ei )p y (fi )q . i=1 6 i=1 Entonces la matriz asociada a C es C = B t A, para ello hay queveri…car que B t Aei = fi puesto que así se caracteriza de manera única a C. 0 1 0 1 ai1 bi1 t t @ t 0 @ A B Aei = B A ai2 = B ei = bi2 A ai3 bi3 El vector e0i representa el i-ésimo vector columna canónico de R3 1 , de esta forma obtenemos B t Aei = fi . La traslación T es la traslación en q C (p). 3 Orientación n o3 Recordemos que cada sistema de referencia (ei )p en p de R3 tiene i=1 asociada su matriz de disposición A. Por un cálculo directo se comprueba que, (e1 )p (e2 )p (e3 )p = det A = 1 Cuando el determinante n de la matriz de disposición es +1, se dice que o3 el sistema de referencia (ei )p esta positivamente orientado y i=1 cuando es 1 se dice netigavamente orientado. Remark 16 Hacemos las siguientes observaciones para sistemas de referencia. a) En cada punto de R3 , el sistema de referencia asignado por el campo natural de sistemas de referencia U1 ; U2 ; U3 está positivamente orientado. o3 n b) Un sistema de referencia (ei )p está positivamente orientado si y i=1 sólo si (e1 )p (e2 )p = (e3 )p . En particular los sistemas de referencia de Frenet están positivamente orientados pues, B = T N . n o3 c) En un sistema de referencia (ei )p que está positivamente orieni=1 tado se cumple: (e1 )p = (e2 )p (e2 )p = (e3 )p (e3 )p = (e1 )p (e3 )p = (e1 )p = (e2 )p = (e3 )p (e1 )p (e2 )p (e2 )p (e3 )p (e1 )p En un sistema de referencia negativamente orientado se deben invertir los vectores en cada producto vectorial. 7 De…nition 17 Se de…ne el signo de una isometría F , como el determinante de C, dónde C es su parte ortogonal. Y lo notamos sgn (F ) = det C n o3 Lemma 18 Si (ei )p es un sistema de referencia en p de R3 y F es i=1 una isometría entonces, F (e1 )p F (e2 )p F (e3 )p = sgn (F ) (e1 )p Proof. Si (ej )p = (aj1 ; aj2 ; aj3 )p es decir (ej )p = 3 X (e2 )p (e3 )p ajk Uk (p) entonces, k=1 F (ej )p = X i;k cik ajk Uei (F (p)) Donde C = (cij ) es la matriz asociada a la parte ortogonal C de la isometría F . Por n o lo tanto la matriz de disposición del sistema de referencia F (ei )p es la matriz que en la posición ij tiene como elemento, i X cik ajk = (CAt )ij . Teniendo en cuenta que el producto mixto de un k sistema de referencia es el determinante de su matriz de disposición se tiene, F (e1 )p F (e2 )p F (e3 )p = det AC t = det (C) det (A) = sgn (F ) (e1 )p (e2 )p (e3 )p donde se ha usado que sgn (F ) = det (C) Remark 19 Del lema se desprende que si sgn (F ) = 1 entonces, F transforma sistemas de referencias positivamente orientados en sistemas de referencias positivamente orientados. Y sistemas de referencias negativamente orientados en sistemas de referencias negativamente orientados. Por otro lado si sgn (F ) = 1, los positivamente orientados se transforman en negativamente orientados y viseversa. De…nition 20 De una isometría F de R3 se dice que, i) Conserva la orientaciín si sgn (F ) = det (C) = 1 ii) Invierte la orientación si sgn (F ) = det (C) = 8 1 Example 21 a) Traslaciones: puesto que la parte ortogonal de una traslación es la identidad entonces, sgn (T ) = det (I) = 1, es decir las traslaciones preservan la orientación. b)Rotaciones: Si C es una rotación con eje z entonces, su matriz asociada es, 0 1 cos sin 0 @ sin cos 0 A 0 0 1 En consecuencia sgn (C) = det (C) = 1 y por lo tanto preservan la orientación. c) Re‡exiones: Si R (p) = ( p1 ; p2 ; p3 ) entonces, R se denomina re‡exión en el plano yz. Es una transformación ortogonal con matriz asociada, 0 1 1 0 0 @ 0 1 0A 0 0 1 Por consiguiente R es una isometría que invierte la orientación. n o3 Lemma 22 Sea (ei )p un sistema de referencia en p de R3 . Si vp = 3 X i=1 i=1 vi (ei )p y wp = 3 X wi (ei )p entonces, i=1 (e1 )p (e2 )p (e3 )p vp wp = (e1 )p (e2 )p (e3 )p v1 v2 v3 w1 w2 w3 n o3 Proof. Sea " = (e1 )p (e2 )p (e3 )p , por ser (ei )p un sistema i=1 de referencia entonces, " = 1. Si asumimos " = 1 (es decir el sistema positivamente orientado) entonces, ! ! 3 3 X X vp wp = vi (ei )p wj (ej )p i=1 j=1 = v1 (e1 )p w2 (e2 )p + v1 (e1 )p w3 (e3 )p +v2 (e2 )p w1 (e1 )p + v2 (e2 )p w3 (e3 )p +v3 (e3 )p w1 (e1 )p + v3 (e3 )p w2 (e2 )p = (v2 w3 v3 w2 ) (e1 )p (v1 w3 v3 w1 ) (e2 )p + (v1 w2 v2 w1 ) (e3 )p (e1 )p (e2 )p (e3 )p = " v1 v2 v3 w1 w2 w3 De forma similar se demuestra el caso " = 9 1 Theorem 23 Sean vp ; wp 2 Tp (R3 ), si F es una isometría entonces, F (vp Proof. Si vp = 3 X wp ) = sgn (F ) F (vp ) vi Ui (p) , wp = i=1 3 X F (wp ) wi Ui (p) y i=1 F lineal, se veri…ca, F (vp ) = 3 X vi i y F (wp ) = i=1 Lema (22), se tiene, 3 X wi i luego por el i=1 1 F (vp ) = F (Ui (p)) al ser i F (wp ) = 1 ( 2 3 v1 v2 v3 w1 w2 w3 3) 2 Sabemos que fUi (p)gi está positivamente orientado luego, por el Lema (18) concluimos que, 1 ( 2 3) = sgn (F ) (U1 (p)) (U2 (p) U3 (p)) = sgn (F ) Como además, 1 F (vp 2 3 wp ) = v1 v2 v3 w1 w2 w3 Por lo tanto, F (vp ) 4 F (wp ) = sgn (F ) F (vp wp ) Geometría Euclidiana En forma general se puede decir que la geometría euclidiana se de…ne como la totalidad de los conceptos que se ven conservados por las isometrías del espacio euclídeo. Por ejemplo se vio que el producto escalar de vectores tangentes se conserva por isometrías y por lo tanto es un ente de la geometría euclidiana. También se vio que, salvo por un signo, el producto vectorial de vectores tangentes queda conservado por isometrías. En la práctica la unidad de signi…cación "geometría euclidiana" se re…ere solamente a los conceptos que las isometrías conservan. Se ha visto que los mapeos (arbitrarios) conservan la velocidad de las curvas, pero no sucede lo mismo con la aceleración de las mismas. Se probarán dos hechos, en primera instancia se verá que las isometrías conservan la derivada de campos vectoriales y en segundo lugar veremos que las isometrías conservan la aceleración de las curvas. 10 Corollary 24 Sea Y un campo vectorial en una curva de R3 y sea F una isometría de R3 . Entonces, Y = F (Y ) es campo vectorial en = F ( ) y además, 0 Y = F (Y 0 ) Proof. Sea Y = X yj Uj j la expresión del campo en término de sus funciones coordenadas euclidianas. Al diferenciar Y obtenemos, Y0 = X dyj j dt Uj Por consiguiente, según la versión en coordenadas del Teorema (10), se tiene, X dyj F (Y 0 ) = cij Ui dt Por otra parte, X Y = F (Y ) = cij yj Ui Cada cij es constante, puesto que, por de…nición son elementos de la matriz de la parte ortogonal de F . En consecuencia, 0 Y = X d X dyj (cij yj ) Ui = cij Ui dt dt 0 Por lo tanto los campos vectoriales F (Y 0 ) y Y son iguales Proposition 25 Sea F una isometría de R3 , una curva de R3 y F ( ) entonces, 00 = F ( 00 ) = Proof. Resulta inmediato a partir del corolario anterior, pues si se toma, Y = 0 entonces, 0 = F ( 0 ) = Y entonces, por el corolario anterior, 00 0 = Y = F (Y 0 ) = F ( 00 ) Se verá ahora que el aparato de Frenet de una curva queda conservado por isometrías. Theorem 26 Sea una curva de rapidez unitaria en R3 con curvatura positiva y sea = F ( ) la curva imagen de por la isometría F . Entonces, 11 i) = ii) = sgn (F ) iii) T = F (T ) iv) N = F (N ) v) B = sgn (F ) F (B) Proof. Observar que 0 es una curva de rapidez unitaria pues, 0 = 0 kF ( )k = k k = 1. Por lo tanto las de…niciones de la unidad 2, sección 3 se aplican a , de manera que, T = 0 = F ( 0 ) = F (T ) Como F conserva la aceleración y la norma de la de…nición de curvatura se deduce que, = 00 = kF ( 00 )k = k 00 k= Para obtener el sistema completo de Frenet, usamos el hecho que, 00 y por lo tanto, > 0. Por de…nición, N = 00 N= Puesto que B = T B=T F ( 00 ) =F 00 = F (N ) N , y por el Teorema (23) se tiene, N = F (T ) Finalmente como, = = = F (N ) = sgn (F ) F (T N ) = sgn (F ) F (B) B 0 N = B N 0 se tiene, 0 = B N = sgn (F ) F (B) F (N 0 ) = sgn (F ) B N 0 = sgn (F ) Remark 27 La intervención de sgn (F ) en la fórmula de la torsión de = F ( ) enseña que la torsión de una curva da una descripción de la curva que es más sutil de lo que aparenta. El signo de mide la orientación de la curva . Si F invierte la orientación, la fórmula = , demuestra que la torsión de la curva imagen F ( ), es la opuesta a la de . 12 Example 28 Sea la hélice de rapidez unitaria: (s) = cos s s s ; sin ; c c c p p Donde c = a2 + b2 , si a = b = 1 entonces, c = 2. Puesto que, a b = a2 +b = a2 +b = = 12 . Tomando 2 y 2 , resulta para este ejemplo, R la re‡exión en el plano xy, esto es, R (x; y; z) = (x; y; z). Por lo tanto la curva imagen R ( ) resulta, (s) = cos s s ; sin ; c c s c Entonces y se tuercen en sentidos opuestos y además = 12 = sgn (F ) = . -1.0 -0.5 z y = = 12 , 3 -1.0 2 -0.5 1 0 0.0 -1 0.0 0.5 -2 x 0.5 -3 1.0 1.0 Re‡exión de una hélice respecto al plano xy 5 Congruencia de curvas De…nition 29 Dos curvas ; : I ! R3 son congruentes cuando existe una isometría F de R3 tal que, = F ( ). Las curvas ; se dicen paralelas sii existe p 2 R3 tal que, = + p. Lemma 30 Dos curvas ; : I ! R3 son paralelas si 0 (s) y 0 (s) son paralelos para cada s 2 I. En este caso si (s0 ) = (s0 ) para algún s0 2 I entonces, = . 13 Proof. Por de…nición 0 (s) y 0 (s) son paralelos si tienen las mismas coordenadas euclidianas, por lo tanto, d i d (s) = i (s) para i = 1; 2; 3 ds ds donde i y i son las funciones coordenadas euclídeas de y . De la igualdad ddsi = ddsi se deduce que, i = i + pi , en consecuencia, = + p. Si se cumple (s0 ) = (s0 ) para algún s0 2 I entonces, p = 0 y por ende, = Theorem 31 Si ; : I ! R3 son curvas de rapidez unitaria tales que, = y = entonces, y son congruentes. Proof. La idea de la demostración es la siguiente: 1) Se encuentra una isometría F y se estudian las propiedades de la curva imagen F ( ). 2) se demuestra que = F ( ). Para hacer la elección de F se hace uso del Teorema (26). Se toma un número …jo en el intervalo I, por ejemplo 0 2 I. Si = sea, entonces, F la isometría (la cual conserva la orientación, por lo que se está suponiendo) que convierte el sistema de referencia de Frenet T (0) ; N (0) ; B (0) de en (0), en el sistema de b (0) ; B b (0) de en (0). Denotando el el referencia de Frenet Tb (0) ; N sistema de Frenet de = F ( ) por ; ; T ; N y B entonces el Teorema (26) y la información anterior producen: (0) = F ( (0)) = = = (0) T (0) = F (T (0)) = Tb (0) b (0) N (0) = F (N (0)) = N b (0) B (0) = sgn (F ) F (B (0)) = B = sgn (F ) = Por otro lado si = , se toma F como la isometría (que invierte la orientación) que transforma T (0) ; N (0) ; B (0) en (0), en el sistema b (0) ; B b (0) de en (0). Entonces por de referencia de Frenet Tb (0) ; N el Teorema (26) se tiene para = F ( ) y , B (0) = sgn (F ) F (B (0)) = = sgn (F ) = b (0) = B b (0) B Las otras otras relaciones quedan como en el caso ahora que T (s) = Tb (s) ; 8s 2 I 14 = . Se probará Para ello sea h : I ! R tal que, b (s) + B (s) B b (s) h (s) = T (s) Tb (s) + N (s) N Por ser éstos campos vectoriales unitarios, por la desigualdad de Schwarz tenemos, T (s) Tb (s) 1 y T (s) Tb (s) = 1 si y sólo si, T (s) = Tb (s). Lo b (s) y B (s) ; B b (s). Por lo tanto, mismo puede a…rmarse para N (s) ; N h (s) 3; 8s 2 I h (0) = 3 Ahora derivando la función h obtenemos: 0 0 b (s) + N (s) N b 0 (s) h0 (s) = T (s) Tb (s) + T (s) Tb0 (s) + N (s) N 0 b (s) + B (s) B b 0 (s) +B (s) B Si se sustituyen por las fórmulas de Frenet en esta última expresión y se usan las relaciones = y = obtenemos, h0 (s) = 0; 8s 2 I De donde resulta que la función h es constante y entonces, h (s) = 3; 8s 2 I Por lo tanto T (s) Tb (s) = 1 si y sólo si, T (s) = Tb (s). Lo mismo puede b (s) y B (s) ; B b (s). Al ser (0) = F ( (0)) = a…rmarse para N (s) ; N b (0) y T (s) = T (s) por el Lema (30) se concluye que, = = F ( ) Remark 32 El Teorema (31) muestra que una curva de rapidez unitaria queda determinada por su curvatura y su torsión en todo salvo su posición en el espacio. Desde el punto de vista de la geometría euclidiana, dos curvas del espacio tridimensional son "iguales" (congruentes) si di…eren en una isometría Example 33 Sean de…nidas por: ; : I ! R3 son las hélices de rapidez unitarias (s) = cos (s) = cos s p 2 s p 2 ; sin ; sin 15 s p 2 s p 2 s ;p 2 s ; p 2 Entonces, = = Por el teorema y sistema de Frenet, = 1 2 1 = 2 son congruentes y la isometría que transforma el p ! 2 2 ; T (0) = 0; 2 2 p N (0) = ( 1; 0; 0) p p ! 2 2 B (0) = 0; ; 2 2 en el sistema de referencia, p 2 T (0) = 0; ; 2 N (0) = ( 1; 0; 0) p 2 ; B (0) = 0; 2 p ! 2 2 p ! 2 2 Es la re‡exión: F (x; y; z) = (x; y; z) Observar que la matríz asociada a esta isometría resulta de considerar C = B t A donde, A y B son las matrices de disposición de los sistemas expuestos arriba, así se teiene, p p 1 0 10 0 1 2 2 0 1 0 0 10 0 p p 2 2 2A@ 1 0p p0 A = @ 0 1 0 A C = @ 2p2 0 p2 2 2 2 2 00 1 0 0 2 2 2 2 Corollary 34 Sea una curva de rapidez unitaria en R3 . Entonces, es una hélice si y sólo si tanto su curvatura como su torsión son constantes distintas de cero. Proof. )) Sea a;b (s) = a cos s s bs ; a sin ; c c c 16 p Donde a > 0; b 6= 0 y c = a2 + b2 . Si es congruente con a;b , podemos suponer que la isometría conserva la orientación (cambiando el signo de b de ser necesario). Por lo tanto, a = 2 (1) a + b2 b = 2 a + b2 de esta forma la curvatura y la torsión son constantes no nulas. () Si tiene curvatura y torsión constantes, no nulas, al despejar de las ecuaciones (1) a y b se obtiene, a= 2 b= 2 + 2 + 2 Por lo tanto, y a;b tienen la misma curvatura y torsión y en consecuencia son congruentes Hasta aquí se ha pedido la condición de curva de rapidez unitaria, pero esta condición se "debilita" en el siguiente: Corollary 35 Sean ; : I ! R3 curva de rapidez arbitaria. Si v = v > 0; entonces, las curvas y = > 0;y = son congruentes. Proof. Sean y reparametrizaciones de rapidez unitaria de y , ambas basadas en t = 0. Puesto que y tienen la misma función de rapidez, se concluye que tienen la misma función de longitud de arco, s = s (t), y por consiguiente, la misma función inversa t = t (s) Debido a que, = y = se deducen de las condiciones generales de curvatura y torsión que, (s) = (s) = (t (s)) = (t (s)) = (t (s)) = (s) (s) (t (s)) = En consecuencia el Teorema (31) asegura que y son congruentes y se puede escribir, F ( ) = . Entonces, la misma isometría transforma en puesto que, F ( (t)) = F ( (s (t))) = (s (t)) = (t) El Teorema (31) sobre congruencia de curvas se extiende de la siguiente forma. 17 Theorem 36 Sean ; : I ! R3 curvas arbitarias, E1 ; E2 ; E3 un campo de sistemas de referencia en ; F1 ; F2 ; F3 un campo de sistemas de referencia en . Si 1) 0 Ei = 0 Fi i = 1; 2; 3 2) Ei0 Ej = Fi0 Fj 1 i; j 3 entonces, y son congruentes. Proof. Se generaliza la argumentación hecha en el Teorema (31). Sea 0 2 I y se G la isometría que transforma E1 (0) ; E2 (0) ; E3 (0) en F1 (0) ; F2 (0) ; F3 (0). Puesto que G conserva los productos escalares se tiene que E i = G (Ei ) ; 1 i 3 es un campo de sistemas de referencia en = G ( ). Por otro lado como G conserva las velocidades y las derivadas de campos vectoriales, se tiene, (0) = (0) E i (0) = Fi (0) 0 0 Ei E i = 0 Fi E j = Fi0 Fj i = 1; 2; 3 1 i; j 3 (2) X 0 La última ecuación signi…ca que se puede escribir E i = aij E j y X Fi0 = aij Fj con las mismas funciones coe…cientes aij . Se debe hacer notar que aij + aji = 0 (pues si se diferencia la identidad, E i E j = se obtiene lo a…rmado). Sea la función, X f= E i Fi ij , Por la misma argumentación que en el Teorema (31) se demostrará que f = 3, puesto que, X X 0 f0 = E i Fi + E i Fi0 = (aij + aji ) E j Fi = 0 Por lo tanto E i = Fi y de las relaciones (2) se deduce, X 0 0 = Ei Ei X 0 = ( 0 Fi ) Fi Son paralelos en cada punto. Como (0) = concluye, = G( ) = 18 (0), por el Lema (30), se