transformada fraccionaria de fourier y su aplicaci´on en
Anuncio

UNIVERSIDAD NACIONAL EXPERIMENTAL DE GUAYANA
VICE-RECTORADO ACADÉMICO
DEPARTAMENTO DE CIENCIA Y TECNOLOGÍA
ÁREA DE MATEMÁTICAS
TRANSFORMADA FRACCIONARIA DE FOURIER
Y SU APLICACIÓN EN WATERMARKING DIGITAL
Trabajo presentado como requisito parcial para optar al ingreso al Escalofón Universitario.
Lic. Silvino Jesús Rodrı́guez Pulido
Asesorado por el Prof. Héctor Martı́nez
Puerto Ordaz, Diciembre de 2007.
Resumen
En este trabajo se estudian aspectos teóricos de la transformada fraccionaria de Fourier
(FrFT), por sus siglas en inglés, ası́ como su aplicación en las marcas de aguas digitales
(watermarking). En el primer capı́tulo se presentan la integral Gaussiana, los polinomios de
Hermite y las funciones Hermite Gaussianas, las cuales son entidades matemáticas que están
relacionadas con la FrFT, además se muestran la definición y las principales propiedades de
la transformada clásica de Fourier. En el siguiente capı́tulo se define la FrFT, se presenta
y demuestran las principales propiedades del núcleo de esta transformada, se calcula la
transformada de algunas funciones básicas, además se establecen y demuestran propiedades
y reglas operacionales de la FrFT. Finalmente se hace una introducción al tema de las marcas
de agua digitales, se realiza en MatLab la implementación de un algoritmo propuesto en un
artı́culo el cual usa la FrFT y se muestran los primeros resultados experimentales obtenidos
de las pruebas realizadas con este algoritmo.
i
Dedicatoria y Agradecimientos
Dedicatoria:
A mi esposa e hijos.
A la memoria de mi padre y de mi abuela.
Agradecimientos:
A Dios por bendecirme para llegar hasta donde he llegado.
A mi amada esposa Lismar por su constante apoyo y su confianza.
A mis hijos Salvador Jesús y Carmen Victoria por su comprensión, paciencia y motivación.
A mi tutor, Prof. Héctor Martı́nez, por compartir conmigo sus conocimientos y su tiempo.
Al Prof. Orlando Baisdem, mi compañero de la lı́nea de investigación, por su consecuente
respaldo y ayuda.
Al Área de Matemáticas y en especial al Prof. Domingo Quijada por su continuo apoyo y
preocupación.
ii
Índice general
Introducción
1
1. Preliminares
3
1.1. La Integral Gaussiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.2. Funciones Hermite Gaussianas . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.2.1. Polinomios de Hermite . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.2.2. Propiedades de los Polinomios de Hermite . . . . . . . . . . . . . . .
7
1.2.3. Funciones Hermite Gaussianas . . . . . . . . . . . . . . . . . . . . . .
10
1.2.4. Propiedades de las Funciones Hermite Gaussianas . . . . . . . . . . .
11
1.3. Función Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
1.3.1. Definición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
1.3.2. Algunas Propiedades de la Función Delta de Dirac . . . . . . . . . . .
14
1.4. Transformada Clásica de Fourier . . . . . . . . . . . . . . . . . . . . . . . . .
14
1.4.1. Propiedades de la Transformada Clásica de Fourier . . . . . . . . . .
16
2. Transformada Fraccionaria de Fourier (FrFT)
2.1. Propiedades del Kernel de la Transformada . . . . . . . . . . . . . . . . . . .
iii
18
19
2.2. Transformada Fraccionaria de Fourier de algunas funciones báscas . . . . . .
33
2.3. Propiedades de la Transformada Fraccionaria de Fourier . . . . . . . . . . .
46
2.4. Autofunciones de la Transformada Fraccionaria de Fourier . . . . . . . . . .
50
2.5. Reglas Operacionales de la Transformada Fraccionaria de Fourier . . . . . .
54
3. Aplicación de la Transformada Fraccionaria de Fourier en Watermarking 70
3.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
3.2. Definición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
3.3. Inicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
3.4. Aplicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
3.5. Caracteristicas
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
3.6. Clasificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
3.7. Algoritmo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
3.8. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
Conclusiones
81
Anexos
82
Referencias
92
iv
Índice de cuadros
2.1. Transformada Fraccionaria de Fourier de algunas funciones básicas . . . . . .
v
34
Índice de figuras
1.1. Gráficas de los primeros 6 polinomios de Hermite . . . . . . . . . . . . . . .
11
1.2. Interpretación geométrica para la transformada clásica de Fourier . . . . . .
16
2.1. Gráficas del Kernel de la FrFT con α = a π2 (parte real) . . . . . . . . . . . .
20
2.2. Gráficas de la FrFT para la función f (x) = 1 . . . . . . . . . . . . . . . . . .
35
2.3. Gráficas de la FrFT para la función f (x) = δ(x) . . . . . . . . . . . . . . . .
36
2 +2λx)
2.4. Gráficas de la FrFT para la función f (x) = eiπ(χx
1
2
. . . .
37
. . .
38
3.1. Esquema del proceso de watermarking. . . . . . . . . . . . . . . . . . . . . .
72
3.2. Esquema para ocultar una foto dentro de otra como una watermarking. . . .
74
3.3. Ejemplo de una marca de agua . . . . . . . . . . . . . . . . . . . . . . . . .
78
3.4. Coeficientes de la FrFT para una marca de agua . . . . . . . . . . . . . . . .
79
3.5. Coeficientes de la FrFT para una marca de agua con diferentes ángulos . . .
80
2 +2λx)
2.5. Gráficas de la FrFT para la función f (x) = e−π(χx
vi
con χ = λ =
con χ = λ =
1
2
Introducción
Los primeros trabajos sobre la Transformada Fraccionaria de Fourier fueron realizados
por N. Wiener en 1929 [21], H. Weyl en 1930, E. U. Condon en 1937 [5] y H. Kober en 1939
[11], entre otros, pero fue el trabajo de Victor Namias en 1980 [15] que dio inicio a un gran
auge en el estudio de este tema. Luego le siguieron trabajos como el de A.C. McBride y F.H.
Kerr en 1987 [14], el de L.B. Almeida en 1994 [1]. En 2001 fue publicado el único libro que
existe en el tema hasta ahora. Sus autores son Ozaktas, Zalevsky y Kutay [16].
En la comunidad cientı́fica internacional algunos investigadores dedican esfuerzo a trabajar en aspectos teóricos de la FrFT, y que han servido de base a otros que trabajan en
diferentes campos de aplicaciones tales como: mecánica cuántica, sistemas ópticos, análisis
y procesamiento de señales, y más recientemente, watermarking.
Esta transformada es un operador lineal que generaliza a la transformada clásica de
Fourier.
Como se sabe, toda transformada integral realmente es un operador lineal que asocia una
función f dada, con ciertas caracterı́sticas, a un núcleo a través de una integral. En el caso
de la FrFT el núcleo está definido por cα e−iπ(2ξx csc(α)−(ξ
2 +x2 ) cot(α))
.
Se analizaron y demostraron las propiedades de este núcleo las cuales se omiten en la
mayorı́a de los artı́culos relacionados con el tema. Además se realizaron algunos cálculos que
1
no aparecen en ninguna de las publicaciones revisadas. Por otra parte, se realizó el estudio
de las propiedades y las reglas operacionales de la FrFT.
Finalmente, en el tema de aplicaciones se hizo un esbozo sobre la aplicación de la FrFT a
la watermarking, el cual es un problema abierto que se estudiará en futuras investigaciones.
2
Capı́tulo 1
Preliminares
En este capı́tulo se exhibirán diferentes formas de la integral Gaussiana ası́ como la
definición y las principales propiedades de las funciones Hermite Gaussianas y de la función
delta de Dirac, las cuales jugarán un papel importante en varias demostraciones de este
trabajo. También se incluye la definición y las propiedades de la transformada clásica de
Fourier.
1.1.
La Integral Gaussiana
La integral Gaussiana, también conocida como la integral de probabilidad (distribución
Normal), es la integral sobre la recta real de la función de Gauss
Z ∞
2
I=
e−x dx.
(1.1)
−∞
Ahora se realizará el cálculo de la integral dada en (1.1).
Sea
µZ
2
∞
I =
−x2
e
¶2
dx
Z
=
e
−∞
−∞
3
Z
∞
−x2
∞
dx
−∞
2
e−y dy
(1.2)
donde la variable auxiliar x se cambió por y en la segunda integral.
La ecuación (1.2) se puede escribir como:
Z ∞Z
2
I =
−∞
∞
2 −y 2
e−x
dxdy
(1.3)
−∞
Haciendo el siguiente cambio de variables
x = r cos θ, y = r sen θ, x2 + y 2 = r2 , dx dy = r dr dθ.
Se puede escribir la ecuación (1.3) como
Z 2π Z ∞
2
e−r r dr dθ
=
0
0
¸k !
·
Z 2π Ã
1 −r2
dθ
=
Limk→∞ − e
2
0
0
Z 2π
1
=
dθ
2
0
I2 = π
entonces
Z
∞
2
e−x dx =
√
π.
−∞
Haciendo un procedimiento análogo se tiene que:
r
Z ∞
π
−cx2
e
dx =
, con c ∈ R, c > 0.
c
−∞
(1.4)
Se observa que con un simple cambio de variables, por ejemplo k = x±b, se puede comprobar
que cualquier traslación en la función de Gauss no afecta al resultado anterior, es decir
r
Z ∞
π
−c(x±b)2
e
dx =
, con b, c ∈ R, c > 0.
c
−∞
4
De lo anterior se puede demostrar que:
r
Z ∞
π b2
−ct2 −bt
e 4c , con b, c ∈ R, c > 0.
e
dt =
c
−∞
(1.5)
Demostración:
se sabe que:
õ
−ct2 + bt = −c
b
t−
2c
¶2
b2
− 2
4c
!
entonces
Z
∞
Z
−ct2 +bt
e
dt =
−∞
³
∞
e
Z−∞
∞
=
Z−∞
∞
−c
2
(t− 2cb )
e−c(t− 2c )
b
−
b2
4c2
2
2
+ b4c
2
b2
´
dt
dt
e−c(t− 2c ) e 4c dt
−∞
Z ∞
b 2
b2
= e 4c
e−c(t− 2c ) dt
r−∞
2
b
π
(i)
= e 4c
.
c
=
b
(i): usando la ecuación (1.4).
En el Capı́tulo 2 se usarán casos más generales de la integral Gaussinana descrita en
(1.5), como lo son:
Z
∞
r
−ct2 ±bt
e
dt =
−∞
o
Z
r
∞
e
−∞
π b2
e 4c , con c, b ∈ C y Re(c) > 0.
c
±iπ(ct2 ±2bt)
dt =
±i ∓iπb2
e c , con c, b ∈ R y c > 0.
c
5
(1.6)
(1.7)
La diferencia entre ambas fórmulas es que en (1.7) los coeficientes son números imaginarios
puros, mientras que en (1.6) son números complejos en general.
Se usarán (1.6) o (1.7) dependiendo de los coeficientes involucrados en las integrales a resolver.
1.2.
Funciones Hermite Gaussianas
En esta sección se presentarán la definición y las principales propiedades de las funciones
Hermite Gaussianas, también se probará más adelante que estas funciones son las eingefunciones (funciones propias) de la trasformada fraccionaria de Fourier.
1.2.1.
Polinomios de Hermite
Los Polinomios de Hermite están definidos de la siguiente manera
2
Hn (x) = (−1)n ex
dn −x2
e , con n ≥ 0.
dxn
y son conocidos como las soluciones de la ecuación diferencial de Hermite
y 00 − 2xy 0 + 2ny = 0.
d0
Aquı́ se entiende que 0 f (x) = f (x).
dx
6
(1.8)
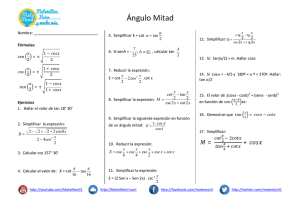
Los primeros Polinomios de Hermite son:
H0 (x) = 1
(1.9)
H1 (x) = 2x
(1.10)
H2 (x) = 4x2 − 2
H3 (x) = 8x3 − 12x
H4 (x) = 16x4 − 48x2 + 12
H5 (x) = 32x5 − 160x3 + 120x
Para la gráfica de estos polinomios ver Figura 1.1 en la página 11.
1.2.2.
Propiedades de los Polinomios de Hermite
1. Derivada de los polinomios de Hermite:
d
Hn (x) = 2nHn−1 (x)
dx
(1.11)
Hn+1 (x) = 2xHn (x) − 2nHn−1 (x)
(1.12)
2. Fórmula de Recurrencia 1:
3. Fórmula de Recurrencia 2:
µ
Hn (x) =
d
2x −
dx
¶
Hn−1 (x)
4. Simetrı́a:
Si n es par (impar), entonces Hn (x) es una función par (impar)
7
A continuación se demostrarán estas propiedades
se inicia con la Propiedad N◦ 1
Demostración:
µ
¶
n
d
d
n x2 d
−x2
Hn (x) =
(−1) e
e
dx
dx
dxn
µ n
¶
´ dn
d ³
d −x2
n x2
−x2
n x2 d
(−1) e
=
e
+ (−1) e
e
dx
dxn
dx dxn
´
n
n ³
2 d
−x2
n x2 d
−x2
= (−1)n 2xex
e
+
(−1)
e
−2xe
dxn
dxn
(1.13)
pero se tiene que
n
d
dxn
³
´
2
−2xe−x
n
n
n
n−1
2
d (−2x) d e−x2 + d (−2x) d
e−x +
0
n
n−1
dx
dx
dx
dx
0
1
n
n
d2
dn−2 −x2
dn
d0 −x2
+
(−2x) n−2 e
+ ... +
(−2x) 0 e
dx2
dx
dxn
dx
2
n
=
0
dn −x2
dn−1 −x2
= −2x n e
− 2n n−1 e
dx
dx
entonces se puede expresar (1.13) como
dn −x2
dn −x2
dn−1 −x2
n x2
e
+
(−1)
e
(−2x
e
−
2n
e )
dxn
dxn
dxn−1
n−1
2 d
2
= −(−1)n 2nex
e−x
n−1
dx
dn−1 −x2
2
= 2n(−1)n−1 ex
e
dxn−1
= 2nHn−1 (x).
= (−1)n 2xex
2
Ası́ se concluye a que
d
Hn (x) = 2nHn−1 (x).
dx
8
(1.14)
Nota 1.1 En esta demostración se usó la Regla de Leibniz para la derivada n-esima de un
producto de dos funciones, la cual establece que:
n
n
k
n−k
X
n
d
d f d
(f
g)
=
g.
dxn
dxk dxn−k
k
k=0
y se usó el hecho que
dk
dxk
(−2x) = 0 para todo k ≥ 2.
Se continúa con la Propiedad N◦ 2
Demostración:
dn+1 −x2
Hn+1 (x) = (−1) e
e
dxn+1
n
d −x2
2 d
= (−1)n+1 ex
e
n
dx dx
n
2
2 d
− 2xe−x
= (−1)n+1 ex
n
dx
n+1 x2
Usando (1.14) se puede escribir que
dn−1 −x2
dn −x2
e
−
2n
e )
dxn
dxn−1
n
n−1
2 d
2
−x2
n+1
x2 d
= −(−1)n+1 2xex
e
−
(−1)
2ne
e−x
n
n−1
dx
dx
n
n−1
2 d
2
2 d
2
= 2x(−1)n ex
e−x − 2n(−1)n−1 ex
e−x
n
n−1
dx
dx
= 2xHn (x) − 2nHn−1 (x).
2
Hn+1 (x) = (−1)n+1 ex (−2x
Se sigue con la Propiedad N◦ 3
Demostración:
Hn (x) = 2xHn−1 (x) − 2(n − 1)Hn−2 (x)
d
= 2xHn−1 (x) − Hn−1 (x)
µ
¶ dx
d
=
2x −
Hn−1 (x).
dx
9
Nota 1.2 Aquı́ primero se usó la Propiedad 2 y luego la Propiedad 1 para Hn (x).
Finalmente se demuestra la Propiedad N◦ 4
Demostración:
Partiendo de la definición de los polinomios de Hermite dada en (1.8) y usando la regla de
la cadena se llega a que
dn −x2
Hn (−x) = (−1) (−1) e
e
dxn
n
2
2 d
e−x
= ex
n
dx
n x2
n
Por otro lado, si n es par se tiene que
2
Hn (x) = ex
dn −x2
e
dxn
con lo que se muestra que Hn (x) = Hn (−x) y ası́ se concluye que Hn (x) es una función par.
Ahora si n es impar se tiene que
dn −x2
e
dxn
= −Hn (−x)
2
Hn (x) = −ex
con lo cual se muestra que Hn (x) es una función impar.
1.2.3.
Funciones Hermite Gaussianas
Las Funciones Hermite Gaussianas se definen como sigue:
x2
ψn (x) = e− 2 Hn (x)
donde Hn (x) representa el polinimio de Hermite de grado n.
10
(1.15)
Figura 1.1: Gráficas de los primeros 6 polinomios de Hermite
1.2.4.
Propiedades de las Funciones Hermite Gaussianas
1. Derivada de las Funciones Hermite Gaussianas:
d
ψn (x) = −xψn (x) + 2nψn−1 (x)
dx
(1.16)
2. Fórmula de Recurrencia 1:
ψn+1 (x) = 2xψn (x) − 2nψn−1 (x)
11
(1.17)
3. Fórmula de Recurrencia 2:
µ
ψn (x) =
d
2x −
dx
¶
ψn−1 (x)
4. Simetrı́a:
Si n es par (impar), entonces ψn (x) es una función par (impar)
A continuación se demostrarán estas propiedades
Se comienza con la Propiedad N◦ 1
Demostración:
´
d
d ³ − x2
ψn (x) =
e 2 Hn (x)
dx
dx
x2 d
d ³ − x2 ´
e 2 Hn (x) + e− 2
=
(Hn (x))
dx
dx
x2
x2
= −xe− 2 Hn (x) + 2n e− 2 Hn−1 (x)
= −xψn (x) + 2nψn−1 (x).
Nota 1.3 En esta demostración se usó la derivada de los polinomios de Hermite (1.11).
Se continúa con la Propiedad N◦ 2
Demostración:
x2
ψn+1 (x) = e− 2 Hn+1 (x)
x2
= e− 2 (2xHn (x) − 2nHn−1 (x))
x2
x2
= 2xe− 2 Hn (x) − 2ne− 2 Hn−1 (x)
= 2xψn (x) − 2nψn−1 (x).
Nota 1.4 En esta demostración se usó la Fórmula de Recurrencia 1 de los polinomios de
Hermite (1.12).
12
Seguidamente se demuestra la Propiedad N◦ 3
Demostración:
ψn (x) = 2xψn−1 (x) − 2(n − 1)ψn−2 (x)
d
= 2xψn−1 (x) − ψn−1 (x)
¶ dx
µ
d
ψn−1 (x).
=
2x −
dx
Nota 1.5 Aquı́ primero se usó la Propiedad 2 y luego la Propiedad 1 para ψn (x)
Finalmente se demuestra la Propiedad N◦ 4
Demostración:
x2
Esta demostración es directa ya que ψn (x) = e− 2 Hn (x), entonces la paridad de ψn (x)
depende de la paridad de Hn (x) asi que ψn (x) es una función par si n es par, y ψn (x) es una
función impar si n es impar.
1.3.
Función Delta de Dirac
En esta sección se exhibirá la definición y algunas de las principales propiedades bien
conocidas de la función Delta de Dirac, las cuales serán utilizadas en demostraciones posteriores.
1.3.1.
Definición
La función Delta de Dirac δ(x) es una función la cual es cero en todas partes excepto en
x = 0 tal que su integral sobre cualquier intervalo que contenga a x = 0 es igual a la unidad,
es decir
0 si x 6= 0
δ(x) =
∞ si x = 0
Z
b
tal que
a
13
1 si 0 ∈ (a, b)
δ(x) dx =
0 si 0 ∈
/ (a, b)
Una función definida de esta manera no es una función en el estricto rigor del análisis
matemático, las cuáles deben tener un valor concreto en cada punto de un cierto dominio.
Dirac la llamo una función impropia o función generalizada.
Una definición alternativa de la función Delta de Dirac, que se usará màs adelante, es la
siguiente:
Z
∞
δ(x) =
e±i2πxu du
(1.18)
−∞
1.3.2.
Algunas Propiedades de la Función Delta de Dirac
δ(x)
, con M 6= 0 constante.
|M |
f (x)δ(x − ξ) = f (ξ)δ(x − ξ).
Z ∞
δ(x − ξ)f (x) dx = f (ξ).
−∞
Z ∞
δ(x − ξ)δ(x − ξ 0 ) dx = δ(ξ − ξ 0 ).
Z−∞
∞
e±i2π(x−ξ)u du = δ(x − ξ).
1. δ(M x) =
2.
3.
4.
5.
(1.19)
(1.20)
(1.21)
−∞
Para más detalles sobre la función delta se puede consultar [18, 23, 13, 20].
1.4.
Transformada Clásica de Fourier
En esta sección se presentarán la definición y algunas propiedades fundamentales de la
transformada clásica de Fourier, las cuales serán la base para la definición y propiedades de
14
la transformada fraccionaria de Fourier.
Definición 1.1 (Espacio de Frechet) El espacio de Frechet L es un espacio vectorial
formado por todas las funciones suaves f (infinitamente diferenciables) tales que:
sup |xm f (n) (x)| < ∞, ∀ m, n ≥ 0
x∈R
Definición 1.2 (Transformada de Fourier) Sea f (x) una función en el espacio de
Frechet L. La Transformada de Fourier (FT) sobre la función f (x) se define como sigue:
Z ∞
F (ξ) =
e−i2πξx f (x)dx
(1.22)
−∞
y la transformada inversa está definida por:
Z ∞
f (x) =
ei2πξx F (ξ)dξ
−∞
Vista como un operador, la tranformada de Fourier es un operador lineal F que envia a
f (x) ∈ L a su transformada de Fourier F (ξ).
Si se considera un plano tiempo-frecuencia donde el eje de las abscisas representa el
tiempo (x) y el eje de las ordenadas representa la frecuencia (ξ), entonces la transformada
de Fourier puede interpretarse como un operador que envı́a la representación de una función
del eje tiempo (x) a su representación en el eje frecuencia (ξ) a través de una rotación en un
ángulo de
π
.
2
Bajo esta interpretación, la trasformada de Fourier es un operador cı́clico de
orden 4 ya que se cumple que (ver Figura 1.2):
¡
¢
¡
¢
¡
¢
F 2 f = f(−x), F 3 f = F (−ξ) y F 4 f = f(x).
15
Figura 1.2: Interpretación geométrica para la transformada clásica de Fourier
1.4.1.
Propiedades de la Transformada Clásica de Fourier
Ahora se demuestra algunas de las propiedades de la transformada de Fourier que luego
serán generalizadas al caso de la transformada fraccionaria de Fourier
Proposición 1.1 Sean f (x), g(x) ∈ L y sean F (ξ) y G(ξ) sus respectivas transformadas de
Fourier entonces se tienen las siguientes propiedades:
16
1. Linealidad: Sean γ, β constantes reales o complejas
F (γf (x) + βg(x)) = γF (ξ) + βG(ξ)
2. Escalamiento: Sea γ 6= 0, una constante real
1
F (f (γx)) =
F
|γ|
µ ¶
ξ
γ
3. Desplazamiento: Sea γ una constante real
F (f (x − γ)) = e−i2πγξ F (ξ)
4. Convolución:
F (f (x) ∗ g(x)) = F (ξ).G(ξ)
5. Producto:
F (f (x).g(x)) = F (ξ) ∗ G(ξ)
6. Identidad de Parseval: Sea g(x) el complejo conjugado de g(x)
Z ∞
Z ∞
f (x)g(x) dx =
F (ξ)G(ξ) dξ
−∞
−∞
7. Conservación de la Energı́a (caso especial de la Identidad de Parseval, g = f ):
Z ∞
Z ∞
2
| f (x)| dx =
| F (ξ)| 2 dξ
−∞
−∞
8. Derivada:
F (f 0 (x)) = i2πξF (ξ)
La demostración de esta Proposición se encuentra en [19, 16].
17
Capı́tulo 2
Transformada Fraccionaria de Fourier
(FrFT)
Definición 2.1 (Transformada fraccionaria de Fourier) Sea f (x) una función acotada del espacio L2 . La Transformada Fraccionaria de Fourier (FrFT) sobre la función f (x)
se define como sigue:
Z
∞
fba {f (x)} = fba (ξ) =
Ka (ξ, x)f (x)dx,
(2.1)
−∞
donde Ka (ξ, x) es conocido como el Kernel de la FrFT y está definido por
2
2
c e−iπ(2ξx csc(α)−(ξ +x ) cot(α)) con a 6∈ 2Z
α
Ka (ξ, x) =
δ(ξ − x)
con a ∈ 4Z
δ(ξ + x)
con a ∈ 2 + 4Z
con
cα =
p
1 − i cot(α) , α = a
18
π
ya∈R
2
(2.2)
La Transformada inversa de fba {f (x)} está definida por fb−a {fba {f (x)}}.
En fba {f (x)}, de la definición 2.1, se entiende a la FrFT como el operador que actúa sobre
la función f (x) y fba (ξ) se entiende como la función que resulta al aplicar la FrFT a la función
f (x).
2.1.
Propiedades del Kernel de la Transformada
En esta sección se mostrarán las principales propiedades del Kernel de la FrFT.
1. Simetrı́a Diagonal
Ka (ξ, x) = Ka (x, ξ)
(2.3)
K−a (ξ, x) = Ka (x, ξ)
(2.4)
Ka (−ξ, x) = Ka (ξ, −x)
(2.5)
2. Conjugado Complejo
3. Simetrı́a Puntual
4. Aditividad
Z
∞
Ka (ξ, t)Kb (t, x)dt = Ka+b (ξ, x)
(2.6)
−∞
5. Ortogonalidad
Z
∞
Ka (ξ, t)Ka (t, x)dt = δ(ξ − x)
−∞
19
(2.7)
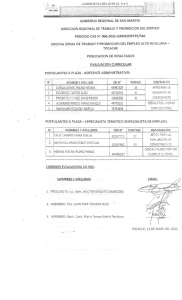
A continuación, en la Figura 2.1, se presenta la gráfica (parte real) del Kernel de la FrFT
para distintos ángulos.
Figura 2.1: Gráficas del Kernel de la FrFT con α = a π2 (parte real)
20
Para la demostración de cada propiedad se tomarán en cuenta los diferentes casos que se
generen a partir de la definición del Kernel.
Se comienza con la Propiedad N◦ 1
Demostración:
• Caso: a 6∈ 2Z
En este caso, de la definición (2.2) se tiene que el Kernel está dado por
Ka (ξ, x) = cα e−iπ(2ξx csc(α)−(ξ
2 +x2 ) cot(α))
por lo que la propiedad es directa al aplicar la conmutatividad del producto y de la
suma.
• Caso: a ∈ 4Z
En este caso, usando (2.2), se tiene que
Ka (ξ, x) = δ(ξ − x)
Usando (1.18) se escribe que
Z
∞
Ka (ξ, x) =
Z−∞
∞
=
e±i2π(ξ−x)u du
e∓i2π(x−ξ)u du
−∞
= δ(x − ξ)
= Ka (x, ξ).
• Caso: a ∈ 2 + 4Z
De (2.2), se tiene que
Ka (ξ, x) = δ(ξ + x)
21
Usando (1.18) se escribe que
Z
∞
Ka (ξ, x) =
(i)
Z−∞
∞
=
e±2πi(ξ+x)u du
e±2πi(x+ξ)u du
−∞
= δ(x + ξ)
= Ka (x, ξ).
(i) : usando la conmutatividad de la suma
Ahora se demuestra la Propiedad N◦ 2
Demostración:
• Caso: a 6∈ 2Z
Por la definición (2.2) se tiene que el Kernel viene dado por
Ka (ξ, x) = cα e−iπ(2ξx csc(α)−(ξ
2 +x2 ) cot(α))
ası́
p
2
2
1 − i cot(α) e−iπ(2xξ csc(α)−(x +ξ ) cot(α))
p
2
2
=
1 + i cot(α) eiπ(2xξ csc(α)−(x +ξ ) cot(α))
Ka (x, ξ) =
Ahora, usando que tanto la función cot(α) y csc(α) son funciones impares se puede
escribir:
Ka (x, ξ) =
p
2 +ξ 2 ) cot(−α))
1 − i cot(−α) e−iπ(2xξ csc(−α)−(x
= K−a (x, ξ)
(i)
= K−a (ξ, x).
(i) : usando la Simetrı́a Diagonal (2.3)
22
• Caso: a ∈ 4Z
Aquı́ se tiene que
Ka (ξ, x) = δ(ξ − x)
Primero se observa que si a ∈ 4Z entonces −a ∈ 4Z, ası́ que
Ka (ξ, x) = K−a (ξ, x) = δ(ξ − x)
por lo tanto se tiene que demostrar que
Ka (ξ, x) = Ka (x, ξ)
Entonces, usando (1.18) se escribe que
Z
∞
e±i2π(x−ξ)u du
Ka (x, ξ) =
Z−∞
∞
e±i2π(x−ξ)u du
=
Z−∞
∞
=
e∓i2π(x−ξ)u du
−∞
= δ(x − ξ)
= Ka (x, ξ)
(i)
= Ka (ξ, x).
(i) : usando la Simetrı́a Diagonal (2.3)
• Caso: a ∈ 2 + 4Z
En este caso se tiene que
Ka (ξ, x) = δ(ξ + x)
igual que antes, si a ∈ 2 + 4Z entonces −a ∈ 2 + 4Z, ası́ que
Ka (ξ, x) = K−a (ξ, x) = δ(ξ + x)
23
entonces se tiene que mostrar que
Ka (ξ, x) = Ka (x, ξ)
Usando (1.18) se escribe que
Z
∞
e±i2π(x+ξ)u du
Ka (x, ξ) =
Z−∞
∞
e±i2π(x+ξ)u du
=
Z−∞
∞
=
e∓i2π(x+ξ)u du
−∞
= δ(x + ξ)
= Ka (x, ξ)
(i)
= Ka (ξ, x).
(i) : usando la Simetrı́a Diagonal (2.3)
Se continúa con la Propiedad N◦ 3
Demostración:
• Caso: a 6∈ 2Z
Se sabe que, para este caso,
Ka (ξ, x) = cα e−iπ(2ξx csc(α)−(ξ
2 +x2 ) cot(α))
entonces
2 +x2 ) cot(α))
Ka (−ξ, x) = cα e−iπ(2(−ξ)x csc(α)−((−ξ)
= cα e−iπ(2ξ(−x) csc(α)−(ξ
= Ka (ξ, −x).
24
2 +(−x)2 ) cot(α))
• Caso: a ∈ 4Z
En este caso, se tiene que,
Ka (ξ, x) = δ(ξ − x)
ası́ que, usando (1.18), se escribe que
Z
∞
Ka (−ξ, x) =
Z−∞
∞
=
Z−∞
∞
=
e±i2π(−ξ−x)u du
e∓i2π(ξ+x)u du
e∓i2π(ξ−(−x))u du
−∞
= δ(ξ − (−x))
= Ka (ξ, −x).
• Caso: a ∈ 2 + 4Z
Aquı́ se tiene que
Ka (ξ, x) = δ(ξ + x)
por lo tanto, usando (1.18), se escribe
Z
∞
Ka (−ξ, x) =
Z−∞
∞
=
e±i2π(−ξ+x)u du
e∓i2π(ξ+(−x))u du
−∞
= δ(ξ + (−x))
= Ka (ξ, −x).
Seguidamente se demuestra la Propiedad N◦ 4
Demostración:
25
• Caso: a 6∈ 2Z, b 6∈ 2Z
Z
∞
Ka (ξ, t)Kb (t, x)dt =
−∞
Z
∞
=
cα e−iπ(2ξt csc(α)−(ξ
2 +t2 ) cot(α))
−∞
Z
iπ(ξ 2 cot(α)+x2 cot(β))
∞
cβ e−iπ(2tx csc(β)−(t
2 +x2 ) cot(β))
dt
2 π(cot(α)+cot(β))
e−it2π(ξ csc(α)+x csc(β))+it
= cα cβ e
dt
(2.8)
−∞
En (2.8) se tiene presente una Integral Gaussiana, donde los coeficientes son números
imaginarios puros por lo tanto se usará (1.7), ası́ que se debe escribir (2.8) según esta
fórmula,
con lo que se llega a que
Z ∞
Ka (ξ, t)Kb (t, x)dt =
−∞
Z
iπ(ξ 2 cot(α)+x2 cot(β))
∞
= cα cβ e
2 )−2(ξ csc(α)+x csc(β))t
eiπ((cot(α)+cot(β)t
dt
(2.9)
−∞
Tomando como c = (cot(α) + cot(β)) y como b = (ξ csc(α) + x csc(β)) se tiene que
Z ∞
Ka (ξ, t)Kb (t, x)dt =
−∞
s
= cα cβ e
iπ(ξ 2
cot(α)+x2
cot(β))
−iπ(ξ csc(α)+x csc(β))2
i
e cot(α)+cot(β)
cot(α) + cot(β)
s
= cα cβ
−iπ(ξ csc(α)+x csc(β))2
2
2
i
eiπ(ξ cot(α)+x cot(β))+ cot(α)+cot(β)
cot(α) + cot(β)
(2.10)
La Integral Gaussiana (1.7) requiere que el coeficiente c ser mayor que cero, por lo
tanto, se debe exigir que cot(α) + cot(β) > 0.
26
q
Ahora se tiene que cα cβ
=
i
cot(α)+cot(β)
p
1 − i cot(α)
s
p
1 − i cot(β)
i
cot(α) + cot(β)
s
(1 − i cot(α))(1 − i cot(β))i
cot(α) + cot(β)
=
s
=
i(1 − i cot(α) − i cot(β) + i2 cot(α) cot(β))
cot(α) + cot(β)
s µ
¶
(1 − cot(α) cot(β)) (−i(cot(α) + cot(β)))
=
i
+
cot(α) + cot(β)
cot(α) + cot(β)
s µ
¶
(1 − cot(α) cot(β))
=
i
−i
cot(α) + cot(β)
y como
cos(α) cos(β)
1 − sen(α)
1 − cot(α) cot(β)
sen(β)
= cos(α) cos(β) =
cot(α) + cot(β)
+
sen(α)
=
sen(β)
sen(α) sen(β)−cos(α) cos(β)
sen(α) sen(β)
cos(α) sen(β)+sen(α) cos(β)
sen(α) sen(β)
=
−(− sen(α) sen(β) + cos(α) cos(β))
− cos(α + β)
=
cos(α) sen(β) + sen(α) cos(β)
sen(α + β)
1 − cot(α) cot(β)
= − cot(α + β)
cot(α) + cot(β)
(2.11)
ası́ se llega a que
s
p
p
i
= i(− cot(α + β) − i) = 1 − i cot(α + β) = cα+β (2.12)
cα cβ
cot(α) + cot(β)
27
Por otro lado se tiene que
eiπ(ξ
2
cot(α)+x2 cot(β))+
= e
= e
= e
(i)
= e
−iπ(ξ csc(α)+x csc(β))2
cot(α)+cot(β)
=
iπ(ξ2 cot(α)+x2 cot(β))(cot(α)+cot(β))−iπ(ξ csc(α)+x csc(β))2
cot(α)+cot(β)
−iπ(−ξ2 cot2 (α)−ξ2 cot(α) cot(β)−x2 cot(β) cot(α)−x2 cot2 β+ξ2 csc2 (α)+x2 csc2 β+2ξx csc(α) csc(β))
cot(α)+cot(β)
−iπ(ξ2 (csc2 (α)−cot2 (α))+x2 (csc2 β−cot2 β)−(ξ2 +x2 ) cot(α) cot(β)+2ξx csc(α) csc(β))
cot(α)+cot(β)
−iπ(ξ2 +x2 −(ξ2 +x2 ) cot(α) cot(β)+2ξx csc(α) csc(β))
cot(α)+cot(β)
= e−iπ(
(ξ2 +x2 )(1−cot(α) cot(β))
2ξx csc(α) csc(β)
+ cot(α)+cot(β) )
cot(α)+cot(β)
(2.13)
para (i) se usó la identidad trigonométrica 1 = csc2 (α) − cot2 (α).
y como
csc(α) csc(β)
=
cot(α) + cot(β)
=
1
1
sen(α) sen(β)
cos(α)
cos(β)
+ sen(β)
sen(α)
=
1
sen(α) sen(β)
cos(α) sen(β)+sen(α) cos(β)
sen(α) sen(β)
=
1
1
=
cos(α) sen(β) + sen(α) cos(β)
sen(α + β)
= csc(α + β)
(2.14)
usando (2.11) y (2.14) en (2.13) se llega a que
eiπ(ξ
2
cot(α)+x2 cot(β))+
−iπ(ξ csc(α)+x csc(β))2
cot(α)+cot(β)
= e−iπ(−(ξ
2 +x2 ) cot(α+β)+2ξx csc(α+β))
= e−iπ(2ξx csc(α+β)−(ξ
2 +x2 ) cot(α+β))
finalmente, partiendo de (2.10) y usando (2.12),(2.15) se escribe
Z ∞
2
2
Ka (ξ, t)Kb (t, x)dt = cα+β e−iπ(2ξx csc(α+β)−(ξ +x ) cot(α+β))
−∞
= Ka+b (ξ, x)
28
(2.15)
• Caso: a ∈ 4Z, b ∈ 4Z
Primero se observa que si a ∈ 4Z y b ∈ 4Z entonces a + b ∈ 4Z, por lo tanto, usando
(2.2) se tiene que
Ka (ξ, t) = δ(ξ − t), Kb (t, x) = δ(t − x) y Ka+b (ξ, x) = δ(ξ − x)
ası́ que, en este caso, se debe demostrar lo siguiente
Z ∞
δ(ξ − t)δ(t − x)dt = δ(ξ − x)
−∞
entonces
Z
Z
∞
∞
Ka (ξ, t)Kb (t, x)dt =
−∞
(i)
δ(ξ − t)δ(t − x)dt
Z−∞
∞
=
δ(t − ξ)δ(t − x)dt
−∞
(ii)
= δ(ξ − x).
(i) : usando la Simetrı́a Diagonal (2.3)
(ii) : propiedad de la función Delta (1.21)
• Caso: a ∈ 2 + 4Z, b ∈ 2 + 4Z
Aquı́ se tiene que si a ∈ 2 + 4Z y b ∈ 2 + 4Z entonces a + b ∈ 4Z, por lo tanto, usando
(2.2) se escribe que
Ka (ξ, t) = δ(ξ + t), Kb (t, x) = δ(t + x) y Ka+b (ξ, x) = δ(ξ − x)
entonces se debe mostrar que
Z ∞
δ(ξ + t)δ(t + x)dt = δ(ξ − x)
−∞
29
Ası́
Z
Z
∞
∞
Ka (ξ, t)Kb (t, x)dt =
δ(ξ + t)δ(t + x)dt
−∞
Z−∞
∞
(i)
=
δ(t + ξ)δ(t + x)dt
Z−∞
∞
=
δ(t − (−ξ))δ(t − (−x))dt
−∞
(ii)
= δ(−ξ − (−x))
= δ((−1)(ξ − x))
(iii)
= δ(ξ − x).
(i) : usando la Simetrı́a Diagonal (2.3)
(ii) : propiedad de la función Delta (1.21)
(iii) : propiedad de la función Delta (1.19)
• Caso: a ∈
/ 2Z, b ∈ 4Z
Para este caso se tiene que
Z ∞
Z
Ka (ξ, t)Kb (t, x)dt =
−∞
∞
cα e−iπ(2ξt csc(α)−(ξ
2 +t2 ) cot(α))
δ(t − x)dt
−∞
(i)
= cα e−iπ(2ξx csc(α)−(ξ
2 +x2 ) cot(α))
(i) : propiedad de la función Delta (1.20)
Ahora, como b ∈ 4Z y β = b π2 entonces β = 2nπ para algún n ∈ Z.
Por otro lado
sen(α + β) = sen(α + 2nπ) = sen(α) y cos(α + β) = cos(α + 2nπ) = cos(α)
entonces se puede escribir que
csc(α) = csc(α + β), cot(α) = cot(α + β)
30
y de (2.2),
cα =
Por lo tanto
Z
∞
p
p
1 − i cot(α) = 1 − i cot(α + β) = cα+β
Ka (ξ, t)Kb (t, x)dt = cα e−iπ(2ξx csc(α)−(ξ
2 +x2 ) cot(α))
−∞
= cα+β e−iπ(2ξx csc(α+β)−(ξ
2 +x2 ) cot(α+β))
= Ka+b (ξ, x).
• Caso: a ∈
/ 2Z, b ∈ 2 + 4Z
Bajo estas condiciones se tiene que
Z ∞
Z ∞
2
2
cα e−iπ(2ξt csc(α)−(ξ +t ) cot(α)) δ(t + x)dt
Ka (ξ, t)Kb (t, x)dt =
−∞
Z−∞
∞
2
2
=
cα e−iπ(2ξt csc(α)−(ξ +t ) cot(α)) δ(t − (−x))dt
−∞
(i)
= cα e−iπ(2ξ(−x) csc(α)−(ξ
= cα e−iπ(−2ξx csc(α)−(ξ
2 +(−x)2 ) cot(α))
2 +x2 ) cot(α))
(i) : propiedad de la función Delta(1.20)
Ahora, como b ∈ 2 + 4Z y β = b π2 entonces β = 2nπ + π para algún n ∈ Z. Además se
sabe que,
sen(α + β) = sen(α + 2nπ + π) = sen(α + π) = − sen(α)
y
cos(α + β) = cos(α + 2nπ + π) = cos(α + π) = − cos(α)
por lo tanto
csc(α + β) = − csc(α) y cot(α + β) = cot(α)
31
Por último, de (2.2) se tiene que,
cα =
p
p
1 − i cot(α) = 1 − i cot(α + β) = cα+β
ası́ se llega a que
Z ∞
2
2
Ka (ξ, t)Kb (t, x)dt = cα e−iπ(−2ξx csc(α)−(ξ +x ) cot(α))
−∞
= cα+β e−iπ(2ξx csc(α+β)−(ξ
2 +x2 ) cot(α+β))
= Ka+b (ξ, x).
• Caso: a ∈ 4Z, b ∈ 2 + 4Z
Para este caso se ve que si a ∈ 4Z y b ∈ 2 + 4Z entonces a + b ∈ 2 + 4Z, por lo tanto,
usando (2.2) se tiene que
Ka (ξ, t) = δ(ξ − t), Kb (t, x) = δ(t + x) y Ka+b (ξ, x) = δ(ξ + x)
ası́ que se debe demostrar que
Z ∞
δ(ξ − t)δ(t + x)dt = δ(ξ + x)
−∞
entonces
Z
Z
∞
∞
Ka (ξ, t)Kb (t, x)dt =
−∞
(i)
δ(ξ − t)δ(t + x)dt
Z−∞
∞
=
δ(t − ξ)δ(t − (−x))dt
−∞
(ii)
= δ(ξ − (−x))
= δ(ξ + x).
(i) : usando la Simetrı́a Diagonal (2.3)
(ii) : propiedad de la función Delta (1.21)
32
Finalmente se demuestra la propiedad N◦ 5
Demostración:
Z
Z
∞
(i)
∞
Ka (ξ, t)Ka (t, x)dt =
−∞
(ii)
Ka (ξ, t)K−a (x, t)dt
Z−∞
∞
=
Ka (ξ, t)K−a (t, x)dt
−∞
(iii)
= Ka+(−a) (ξ, x)
(iv)
= δ(ξ − x).
(i) : por la propiedad del Conjugado Complejo (2.4).
(ii) : usando la propiedad de la Simetrı́a Diagonal (2.3).
(iii): usando la propiedad de la Aditividad (2.6).
(iv) : por la definición del Kernel (2.2).
2.2.
Transformada Fraccionaria de Fourier de algunas
funciones báscas
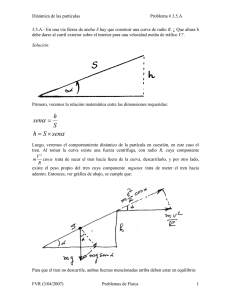
En esta sección se realizan los cálculos de la transformada fraccionaria de Fourier para
algunas funciones básicas. Se presentan estos resultados en la Tabla 2.1, la cual se encuentra
en la siguiente página, además se presenta la gráfica de la FrFT (parte real e imaginaria)
con diferentes ángulos para las siguientes funciones: la función f (x) = 1 en la Figura 2.2
(pág:35), la función f (x) = δ(x) en la Figura 2.3 (pág:36), la función f (x) = eiπ(χx
χ=λ=
1
2
2 +2λx)
en la Figura 2.4 (pág:37), y la función f (x) = e−π(χx
2 +2λx)
con χ = λ =
1
2
con
en la
Figura 2.5 (pág:38).
A continuación se presentará el cálculo de las transformada de las funciones mostradas
en la tabla 2.1, estos cálculos se harán sólo para los casos más generales de las funciones,
exhibiendo luego los casos particulares.
33
N
f (x)
fba (ξ)
1
1
p
2
1 + i tan(α) e−iπξ tan(α)
2
δ(x)
3
δ(x − γ)
4
ei2πλx
5
eiπχx
6
e−πx
7
p
1 + i tan(α) e−iπ(ξ
q
2
2 +2λx)
e−2πλx
1+i tan(α)
1+χ tan(α)
q
1+i tan(α)
1+χ tan(α)
eiπ
cot(α)
tan(α)−2λξ sec(α)+λ2 tan(α))
eiπξ
1 + i tan(α) eπ(i(λ
e−πξ
q
2
e−πχx
q
2
2 −ξ 2 ) tan(α)−2ξλ sec(α))
2
2 + πλ tan(α)+i2πξλ sec(α)
tan(α)−i
1−i cot(α)
χ−i cot(α)
1−i cot(α)
χ−i cot(α)
2 χ−tan(α)
1+χ tan(α)
ξ2 (χ−tan(α))+2λξ sec(α)−λ2 tan(α)
1+χ tan(α)
p
2 +2λx)
e
2
e−πξ
e−π(x
−π(χx2 +2λx)
2
p
2
2
1 − i cot(α) e−iπ(2γξ csc(α)−(γ +ξ ) cot(α))
eiπ(χx
10
11
1 − i cot(α) eiπξ
2
8
9
p
e
e
πξ2 (iχ−tan(α))
χ tan(α)−i
πξ2 (iχ cot(α)−1)+πλ2 +i2πξλ csc(α)
χ−i cot(α)
Tabla 2.1: Transformada Fraccionaria de Fourier de algunas funciones básicas
34
a=0 (parte real)
a=0 (parte imaginaria)
2
2
1
1
0
0
−1
−1
−2
−4
−2
0
2
a=0.25 (parte real)
−2
−4
4
2
2
1
1
0
0
−1
−1
−2
−4
−2
0
2
a=0.5 (parte real)
−2
−4
4
2
2
1
1
0
0
−1
−1
−2
−4
−2
0
2
−2
−4
4
−2
0
2
a=0.25 (parte imaginaria)
4
−2
0
2
a=0.5 (parte imaginaria)
4
−2
4
0
Figura 2.2: Gráficas de la FrFT para la función f (x) = 1
35
2
a=0.25 (parte real)
a=0.25 (parte imaginaria)
2
2
1
1
0
0
−1
−1
−2
−4
−2
0
2
a=0.5 (parte real)
−2
−4
4
2
2
1
1
0
0
−1
−1
−2
−4
−2
0
2
a=0.75 (parte real)
−2
−4
4
2
2
1
1
0
0
−1
−1
−2
−4
−2
0
2
−2
−4
4
−2
0
2
a=0.5 (parte imaginaria)
4
−2
0
2
a=0.75 (parte imaginaria)
4
−2
4
0
Figura 2.3: Gráficas de la FrFT para la función f (x) = δ(x)
36
2
a=0.25 (parte real)
a=0.25 (parte imaginaria)
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−4
−2
0
2
a=0.5 (parte real)
−1
−4
4
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−4
−2
0
2
a=0.75 (parte real)
−1
−4
4
2
2
1
1
0
0
−1
−1
−2
−4
−2
0
2
−2
−4
4
−2
0
2
a=0.5 (parte imaginaria)
4
−2
0
2
a=0.75 (parte imaginaria)
4
−2
4
0
2 +2λx)
Figura 2.4: Gráficas de la FrFT para la función f (x) = eiπ(χx
37
2
con χ = λ =
1
2
a=0.25 (parte real)
a=0.25 (parte imaginaria)
5
6
4
0
2
0
−5
−4
−2
0
2
a=0.5 (parte real)
−2
−4
4
10
−2
0
2
a=0.5 (parte imaginaria)
4
−2
0
2
a=0.75 (parte imaginaria)
4
−2
4
1
0
5
−1
0
−5
−4
−2
−2
0
2
a=0.75 (parte real)
−3
−4
4
5
5
0
0
−5
−5
−4
−2
0
2
−10
−4
4
0
2 +2λx)
Figura 2.5: Gráficas de la FrFT para la función f (x) = e−π(χx
38
2
con χ = λ =
1
2
Se comenzará por la función N◦ 1, es decir, se calcula la FrFT de f (x) = 1
Z
fba (ξ) =
∞
2
2
cα e−iπ(2xξ csc(α)−(x +ξ ) cot(α)) dx
−∞
Z ∞
2
iπξ 2 cot(α)
= cα e
e−iπ2xξ csc(α)+iπx cot(α) dx
(2.16)
−∞
Aquı́ se tiene presente una Integral Gaussiana, donde los coeficientes son números imaginarios puros, por lo tanto, se usará (1.7), para ello se escribe (2.16) de la siguiente manera
Z
fba (ξ) = cα e
iπξ 2 cot(α)
∞
eiπ(x
2
cot(α)−2xξ csc(α))
dx
(2.17)
−∞
Tomando c = cot(α) y b = ξ csc(α) se tiene que
s
2
fba (ξ) = cα eiπξ cot(α)
s
= cα
−iπ(ξ csc(α))2
i
e cot(α)
cot(α)
−iπ(ξ csc(α))2
2
i
eiπξ cot(α)+ cot(α)
cot(α)
(2.18)
Para aplicar la Integral Gaussiana (1.7) se debe cumplir que c > 0, ası́ que se tiene la
restricción cot(α) > 0
Ahora se tiene que
s
cα
i
=
cot(α)
s
p
s
i
(1 − i cot(α))i
=
cot(α)
cot(α)
s
s
(1 − i cot(α))i
i + cot(α)
=
=
cot(α)
cot(α)
s
p
i
+ 1 = 1 + i tan(α)
=
cot(α)
1 − i cot(α)
39
(2.19)
Además se tiene que
eiπ(ξ
2
cot(α))+
−iπ(ξ csc(α))2
cot(α)
= e
= e
(i)
= e
iπξ2 cot2 (α)−iπξ2 csc2 (α)
cot(α)
iπξ2 (cot2 (α)−csc2 (α))
cot(α)
iπξ2 (−1)
cot(α)
= e−iπξ
2
tan(α)
(2.20)
para (i) se usó la identidad trigonométrica 1 = csc2 (α) − cot2 (α).
Por lo tanto se puede reescribir (2.18) como
p
1 + i tan(α) e−iπξ
2
tan(α)
. Ası́ se muestra que
la FrFT de f (x) = 1 es
fba (ξ) =
p
1 + i tan(α) e−iπξ
2
tan(α)
.
Se continúa con la función N◦ 3 de la Tabla 2.1
Z ∞
2
2
b
cα e−iπ(2xξ csc(α)−(x +ξ ) cot(α)) δ(x − γ)dx
fa (ξ) =
−∞
2
(i)
2
= cα e−iπ(2γξ csc(α)−(γ +ξ ) cot(α))
p
2
2
=
1 − i cot(α) e−iπ(2γξ csc(α)−(γ +ξ ) cot(α))
(i) : propiedad de la función Delta (1.20)
Por lo tanto, la FrFT de f (x) = δ(x − γ) es
fba (ξ) =
p
1 − i cot(α) e−iπ(2γξ csc(α)−(γ
2 +ξ 2 ) cot(α))
.
Y para obtener la función N◦ 2 se hace γ = 0 de la fórmula anterior con lo que se obtiene
que la FrFT de f (x) = δ(x) es
fba (ξ) =
p
2
1 − i cot(α) eiπξ cot(α) .
40
Ahora se realizará el cálculo para la función N◦ 7 de la Tabla 2.1
Z ∞
2
2
2
b
fa (ξ) =
cα e−iπ(2xξ csc(α)−(x +ξ ) cot(α)) eiπ(χx +2λx) dx
−∞
Z ∞
2
2
iπξ 2 cot(α)
= cα e
e−iπ2xξ csc(α)+iπx cot(α)+iπχx +iπ2λx dx
Z−∞
∞
2
2
= cα eiπξ cot(α)
eiπ(x (cot(α)+χ)+2x(λ−ξ csc(α))) dx
−∞
Nuevamente se tiene presente la fórmula general de la Integral Gaussiana con coeficientes
imaginarios puros descrita en (1.7), ası́ que tomando c = (cot(α) + χ) y b = (λ − ξ csc(α)),
se llega a que
s
−iπ(λ−ξ csc(α))2
i
e cot(α)+χ
cot(α) + χ
s
p
−iπ(λ2 +ξ2 csc2 (α)−2λξ csc(α))
2
i
cot(α)+χ
1 − i cot(α)
eiπξ cot(α)+
cot(α) + χ
s
2 −iπξ2 csc2 (α)+2iπλξ csc(α)
(1 − i cot(α))i iπξ2 cot2 (α)+iπχξ2 cot(α)−iπλ
cot(α)+χ
e
cot(α) + χ
s
cot(α))−iπλ2 +i2πξλ csc(α)
i + cot(α) iπξ2 (cot2 (α)−csc2 (α)+χ
cot(α)+χ
e
cot(α) + χ
v
χ
u
)−iπλ2 +i2πξλ csc(α)
iπξ2 (−1+
1
tan(α)
u i + tan(α)
1
+χ
t
tan(α)
e
1
+
χ
tan(α)
2
2 tan(α)+i2πξλ csc(α) tan(α)
v
u i tan(α)+1 iπξ (− tan(α)+χ)−iπλtan(α)
u tan(α)
1+χ tan(α)
t
tan(α)
e
1+χ tan(α)
fba (ξ) = cα e
=
=
=
(i)
=
=
iπξ 2
cot(α)
tan(α)
41
s
(ii)
=
s
=
2 tan(α)+i2πξλ sec(α)
i tan(α) + 1 iπξ2 (χ−tan(α))−iπλ
1+χ
tan(α)
e
1 + χ tan(α)
sec(α)−λ2 tan(α)
1 + i tan(α) iπ ξ2 (χ−tan(α))+2λξ
1+χ tan(α)
e
1 + χ tan(α)
(i): por la identidad trigonométrica 1 + cot2 (α) = csc2 (α).
(ii): usando que csc(α) tan(α) = sec(α).
2
Ası́ se tiene que la FrFT de f (x) = eiπ(χx +2λx) es
s
sec(α)−λ2 tan(α)
1 + i tan(α) iπ ξ2 (χ−tan(α))+2λξ
b
1+χ
tan(α)
fa (ξ) =
e
.
1 + χ tan(α)
Se debe cumplir que cot(α) + χ > 0 para poder usar la Integral Gaussiana (1.7).
Se pueden calcular las siguientes FrFT como casos particulares del resultado obtenido
Caso 1: χ = 0
La FrFT de f (x) = e2πiλx es
fba (ξ) =
p
1 + i tan(α) e−iπ(ξ
2
tan(α)−2λξ sec(α)+λ2 tan(α))
Ası́ obtenemos la función N◦ 4 de la Tabla 2.1.
Caso 2: λ = 0
2
La FrFT de f (x) = eiπχx es
s
fba (ξ) =
χ−tan(α)
1 + i tan(α) πiξ2 1+χ
tan(α)
e
1 + χ tan(α)
De esta manera, se genera la FrFT para la función N◦ 5.
Caso 3: λ = 0, χ = i
2
La FrFT de f (x) = e−πx es
2
fba (ξ) = e−πξ
En este caso, se calcula la FrFT para la función N◦ 6.
42
Se continúa efectuando el cálculo para la función N◦ 11 de la Tabla 2.1
Z ∞
2
2
2
fba (ξ) =
cα e−iπ(2xξ csc(α)−(x +ξ ) cot(α)) e−π(χx +2λx) dx
−∞
Z ∞
2
2
iπξ 2 cot(α)
= cα e
e−iπ2xξ csc(α)+iπx cot(α)−πχx −π2λx dx
Z−∞
∞
2
2
= cα eiπξ cot(α)
e x π(i cot(α)−χ)−x2π(iξ csc(α)+λ) dx
Z−∞
∞
2
2
= cα eiπξ cot(α)
e −x π(χ−i cot(α))−x2π(iξ csc(α)+λ) dx
−∞
Aquı́ se tiene presente una fórmula general de la Integral Gaussiana donde los coeficientes no
son números imaginarios puros, por lo que se debe usar la fórmula (1.6), entonces al tomar
c = π(χ − i cot(α)) y b = 2π(iξ csc(α) + λ) se llega a que
r
(2π(iξ csc(α)+λ))2
π
e 4π(χ−i cot(α))
π(χ − i cot(α))
s
p
π(i2 ξ2 csc2 (α)+λ2 +i2ξλ csc(α))
1
2
χ−i cot(α)
1 − i cot(α) eiπξ cot(α)
e
χ − i cot(α)
s
2 +i2πξλ csc(α)
1 − i cot(α) iπξ2 cot(α)+ −πξ2 csc2 α+πλ
χ−i cot(α)
e
χ − i cot(α)
s
2 csc2 α+πλ2 +i2πξλ csc(α)
1 − i cot(α) iπξ2 χ cot(α)+πξ2 cot2 (α)−πξ
χ−i
cot(α)
e
χ − i cot(α)
s
2 α)+πλ2 +i2πξλ csc(α)
1 − i cot(α) πξ2 (iχ cot(α)+cot2 (α)−csc
χ−i
cot(α)
e
χ − i cot(α)
s
2 +i2πξλ csc(α)
1 − i cot(α) πξ2 (iχ cot(α)−1)+πλ
χ−i cot(α)
e
χ − i cot(α)
2
fba (ξ) = cα eiπξ cot(α)
=
=
=
=
(i)
=
(i): por la identidad trigonométrica 1 + cot2 (α) = csc2 (α).
43
2
Ası́ se muestra que la FrFT de f (x) = e−π(χx +2λx) es
s
2 +2iπξλ csc(α)
1 − i cot(α) πξ2 (iχ cot(α)−1)+πλ
χ−i cot(α)
e
.
fba (ξ) =
χ − i cot(α)
(2.21)
La Integral Gaussiana (1.6) tiene como condición que Re(c) > 0 y en este caso Re(c) = πχ
ası́ que se debe exigir que χ > 0.
Se pueden calcular algunas FrFT como casos particulares del resultado anterior
Caso 1: χ = 0
La FrFT de f (x) = e−2πλx es
fba (ξ) =
√
2 −ξ 2 )i tan(α)−2ξλ sec(α))
1 + i tan eπ((λ
Ası́ se produce la FrFT de la función N◦ 8 de la Tabla 2.1
Caso 2: χ = 1
La FrFT de f (x) = e−π(x
2 +2λx)
es
2
fba (ξ) = e−πξ +
πλ2 tan(α)+2iπξλ sec(α)
tan(α)−i
En este caso se origina la FrFT de la función N◦ 9.
Caso 3: λ = 0
2
La FrFT de f (x) = e−πχx es
fba (ξ) =
s
1 − i cot(α) πξ2χ(iχ−tan(α))
e tan(α)−i
χ − i cot(α)
Aquı́ se muestra la FrFT para la función N◦ 10 de la Tabla 2.1
Caso 4: χ = 1, λ = 0
2
La FrFT de f (x) = e−πx es
2
fba (ξ) = e−πξ
De esta manera se genera, por otra vı́a, la FrFT de la fórmula N◦ 6.
44
Según Ozaktas, Zalevsky y Kutay [16], la FrFT de la función 9 de la Tabla 2.1 es
s
sec(α)+λ2
ξ2 χ+2ξλ cos(α)−χλ2 sen2 (α)
1 − i cot(α) iπ cot(α) ξ2 (χ2 −1)+2ξχλ
−π csc2 (α)
2 +cot2 (α)
b
χ
χ2 +cot2 (α)
fa (ξ) =
e
e
χ − i cot(α)
(2.22)
Ası́ que se debe mostrar la equivalencia entre (2.21) y (2.22). Comparandolas se ve que el
q
1−i cot(α)
término χ−i
está presente en ambas por lo tanto solo se debe mostrar que
cot(α)
e|
πξ2 (iχ cot(α)−1)+πλ2 +i2πξλ csc(α)
χ−i cot(α)
iπ cot(α)
} = |e
{z
ξ2 (χ2 −1)+2ξχλ sec(α)+λ2
χ2 +cot2 (α)
(A)
−π csc2 (α)
e
{z
ξ2 χ+2ξλ cos(α)−χλ2 sen2 (α)
χ2 +cot2 (α)
}
(B)
Trabajando con (B) se tiene que
(B) = e
iπ cot(α)(ξ2 (χ2 −1)+2ξχλ sec(α)+λ2 )−π csc2 (α)(ξ2 χ+2ξλ cos(α)−χλ2 sen2 (α))
χ2 +cot2 (α)
(C)
= e
(D)
z
}|
{
z
}|
{
2
2
2
πξ2 (i cot(α)(χ − 1) − χ csc (α)) +2πξλ (iχ cot(α) sec(α) − csc (α) cos(α))
χ2 +cot2 (α)
×
(E)
πλ2
×e
z
}|
{
2
2
(i cot(α) + χ csc (α) sen (α))
χ2 +cot2 (α)
En (C) se tiene que
i cot(α)(χ2 − 1) − χ csc2 (α) = i cot(α)(χ2 − 1) − χ(cot2 (α) + 1)
= iχ2 cot(α) − i cot(α) − χ cot2 (α) − χ
= iχ2 cot(α) − i cot(α) + i2 χ cot2 (α) − χ
= (iχ cot(α) − 1)(χ + i cot(α)).
En (D) se tiene que
1
cos(α) 1
−
cos(α)
sen(α) cos(α) sen2 (α)
= iχ csc(α) − cot(α) csc(α)
cot(α)
= i csc(α)(χ −
)
i
= i csc(α)(χ + i cot(α)).
iχ cot(α) sec(α) − csc2 (α) cos(α) = iχ
45
(2.23)
En (E) se tiene que i cot(α) + χ csc2 (α) sen2 (α) = i cot(α) + χ.
Incorporando estas equivalencias en (2.23) se puede escribir que
(B) = e
= e
= e
= e
πξ2 (iχ cot(α)−1)(χ+i cot(α))+i2πξλ csc(α)(χ+i cot(α))+πλ2 (χ+i cot(α))
χ2 −i2 cot2 (α)
(πξ2 (iχ cot(α)−1)+i2πξλ csc(α)+πλ2 )(χ+i cot(α))
χ2 −(i cot(α))2
(πξ2 (iχ cot(α)−1)+i2πξλ csc(α)+πλ2 )(χ+i cot(α))
(χ−i cot(α))(χ+i cot(α))
πξ2 (iχ cot(α)−1)+i2πξλ csc(α)+πλ2
χ−i cot(α)
= (A).
Ası́ se llega a que (2.21) y (2.22) son equivalentes.
2.3.
Propiedades de la Transformada Fraccionaria de
Fourier
Sea fba (ξ) la Transformada Fraccionaria de Fourier de la función f (x) entonces se tienen
las siguientes propiedades
1. Conservación de la simetrı́a
a) Si f (x) es una función par entonces fba (ξ) es una función par.
b) Si f (x) es una función impar entonces fba (ξ) es una función impar.
2. Linealidad
fba
(
X
)
αk fk (x)
k
=
X
αk fba {fk (x)}
k
3. Elemento Unitario: Sea f (x) una función real, entonces
³
´−1
b
fa (ξ)
= fba (ξ)
46
(2.24)
4. Propiedad de Índice Aditividad
n
o
fba1 fba2 {f (x)} = fba1 +a2 {f (x)}
(2.25)
5. Propiedad Conmutativa
n
o
n
o
b
b
b
b
fa1 fa2 {f (x)} = fa2 fa1 {f (x)}
Seguidamente se presenta la demostración de estas propiedades:
Se comienza con la Propiedad N◦ 1
• Si f (x) es una función par entonces fba (ξ) es una función par
Demostración:
Se debe mostrar que fba (ξ) = fba (−ξ), sabiendo que f (x) es par
Z ∞
b
fa (−ξ) =
Ka (−ξ, x)f (x) dx
−∞
Z ∞
(i)
=
Ka (ξ, −x)f (x) dx
−∞
Z ∞
(ii)
Ka (ξ, −x)f (−x) dx
=
−∞
Ahora tomando el cambio de variables y = −x se tiene que dy = −dx y como x va de
−∞ a ∞ entonces y va de ∞ a −∞. Ası́ se obtiene que
Z ∞
Z −∞
Ka (ξ, −x)f (−x) dx = −
Ka (ξ, y)f (y) dy
−∞
∞
Z ∞
(iii)
=
Ka (ξ, y)f (y) dy
−∞
= fba (ξ).
(i): Usando la propiedad de Simetrı́a Puntual del Kernel (2.5).
(ii): Usando que f (x) es una función par.
(iii): Por el cambio del orden en los lı́mites de integración.
47
• Si f (x) es una función impar entonces fba (ξ) es una función impar.
Demostración:
Se tiene que ver que fba (ξ) = −fba (−ξ), usando que f (−x) = −f (x)
Z ∞
b
−fa (−ξ) = −
Ka (−ξ, x)f (x) dx
−∞
Z ∞
(i)
=
Ka (ξ, −x)(−f (x)) dx
−∞
Z ∞
(ii)
=
Ka (ξ, −x)f (−x) dx
−∞
Ahora por el cambio de variables y = −x se tiene que dy = −dx y como x va de −∞
a ∞ entonces y va de ∞ a −∞. Ası́ se obtiene que
Z −∞
Z ∞
Ka (ξ, y)f (y) dy
Ka (ξ, −x)f (−x) dx = −
∞
−∞
Z ∞
(iii)
=
Ka (ξ, y)f (y) dy
−∞
= fba (ξ).
(i): Usando la propiedad de Simetrı́a Puntual del Kernel (2.5).
(ii): Usando que f (x) es una función impar.
(iii): Por el cambio del orden en los lı́mites de integración.
Se continúa mostrando la Propiedad N◦ 3
Demostración:
³
´−1
fba (ξ)
= fb−a (ξ)
Z ∞
=
K−a (ξ, x)f (x)dx
−∞
Z ∞
Ka (x, ξ)f (x)dx
=
−∞
48
Z
∞
=
Ka (x, ξ)f (x)dx
−∞
Z ∞
=
Ka (x, ξ)f (x)dx
−∞
= fba (ξ).
Nota 2.1 En esta demostración se usó la definición de la inversa de la transformada fraccionaria de Fourier, la propiedad del Conjugado Complejo del Kernel (2.4) y se usó que
f (x) = f (x) en el caso que f (x) sea una función real.
Seguidamente se trabaja con la Propiedad N◦ 4
Demostración:
Z ∞
n
o
b
b
fa1 fa2 (t)
=
Ka1 (ξ, t)fba2 (t) dt
·Z ∞
¸
Z−∞
∞
=
Ka1 (ξ, t)
Ka2 (t, x)f (x) dx dt
−∞
−∞
Z ∞Z ∞
=
Ka1 (ξ, t)Ka2 (t, x)f (x) dx dt
−∞ −∞
¸
Z ∞ ·Z ∞
(i)
=
Ka1 (ξ, t)Ka2 (t, x) dt f (x) dx
−∞
Z−∞
∞
(ii)
=
Ka1 +a2 (ξ, x)f (x) dx
−∞
= fba1 +a2 .
(i): aplicando el Teorema de Fubbini.
(ii): por la propiedad de aditividad del Kernel (2.6)
Ahora se continúa con la propiedad N◦ 5
Demostración:
Directo, usando la Propiedad de Índice Aditividad (2.25) y la propiedad de conmutativa de
la suma en R.
49
2.4.
Autofunciones de la Transformada Fraccionaria de
Fourier
En esta sección se mostrará que las funciones Hermite Gaussianas son las Autofunciones
de la FrFT.
Definición 2.2 Sea A un operador lineal, se dice que f es una autofunción o función propia
de A si se cumple que Af = λf donde λ se conoce como el correspondiente autovalor de f .
Entonces en nuestro caso se verá que
fba {ψn (x)} = eiαn ψn (ξ)
(2.26)
donde eian son los correspondientes autovalores.
Demostración:
Siguiendo el Proceso Inductivo, primero se mostrará que la relación es cierta para n = 0 y
para n = 1, luego se supondrá que es cierta para n = k y finalmente se mostrará que se
cumple para n = k + 1.
Para n = 0 se tiene que probar que
fba {ψ0 (x)} = eiα(0) ψ0 (ξ),
Se sabe que
x2
ψ0 (x) = e− 2 H0 (x)
y como H0 (x) = 1 (1.9), entonces se llega a que
x2
ψ0 (x) = e− 2
50
ası́ que se debe mostrar que
n x2 o
ξ2
fba e− 2 = e− 2
Para n = 1 se tiene que probar que
fba {ψ1 (x)} = eiα ψ1 (ξ),
Se sabe que
x2
ψ1 (x) = e− 2 H1 (x)
y usando que H1 (x) = 2x (1.10) se llega a que
x2
ψ1 (x) = 2xe− 2
ası́ que se debe mostrar que
o
n
ξ2
x2
fba 2xe− 2 = eiα 2ξe− 2
En este caso se usará la regla de la multiplicación, la cual establece que:
µ
¶
d b
b
fa {xf (x)} = ξcos(α) − i sen(α)
fa {f (x)}
dξ
51
Entonces se tiene que
n
o
n
o
x2
x2
(i)
fba 2xe− 2
= 2fba xe− 2
¶
µ
d b n − x2 o
(ii)
= 2 ξ cos(α) − i sen(α)
fa e 2
dξ
µ
¶
ξ2
d
(iii)
= 2 ξ cos(α) − i sen(α)
e− 2
dξ
µ
¶
2
d − ξ2
− ξ2
= 2 ξ cos(α)e
− i sen(α) e 2
dξ
µ
¶
2
2
− ξ2
− x2
+ i sen(α)ξe
= 2 ξ cos(α)e
x2
= 2ξe− 2 (cos(α) + i sen(α))
(iv)
ξ2
= eiα 2ξe− 2
(i): por la linealidad de la FrFT (2.24).
(ii): por la regla operacional de la Multiplicación.
(iii): por el caso n = 0.
(iv): por la fórmula de Euler.
Ahora se supondrá que la proposición es cierta hasta n = k, por lo tanto, se tiene que
fba {ψk (x)} = eiαk ψk (ξ)
(2.27)
y se tiene que mostrar que la proposición es cierta para n = k + 1, es decir, se tiene que ver
que
fba {ψk+1 (x)} = eiα(k+1) ψk+1 (ξ)
52
Entonces
(i)
fba {ψk+1 (x)} = fba {2xψk (x) − 2kψk−1 (x)}
= 2fba {xψk (x)} − 2k fba {ψk−1 (x)}
µ
¶
d b
(iii)
= 2 ξ cos(α) − i sen(α)
fa {ψk (x)} − 2k fba {ψk−1 (x)}
dξ
µ
¶
d
(iv)
= 2 ξ cos(α) − i sen(α)
eiαk ψk (ξ) − 2keiα(k−1) ψk−1 (ξ)
dξ
µ
¶
d
iαk
= 2e
ξ cos(α)ψk (ξ) − i sen(α) ψk (ξ) − 2keiα(k−1) ψk−1 (ξ)
dξ
(ii)
(v)
= 2eiαk (ξ cos(α)ψk (ξ) − i sen(α)(−ξψk (ξ) + 2kψk−1 (ξ))) − 2keiα(k−1) ψk−1 (ξ)
= 2eiαk (ξ cos(α)ψk (ξ) + iξ sen(α)ψk (ξ) − i2k sen(α)ψk−1 (ξ)) − 2keiαk e−iα ψk−1 (ξ)
= 2ξeiαk ψk (ξ)(cos(α) + i sen(α)) − 2keiαk ψk−1 (ξ)(2i sen(α) + e−iα )
(vi)
= 2ξeiαk ψk (ξ)eiα − 2neiαk ψk−1 (ξ)(2i sen(α) + cos(α) − i sen(α))
= 2ξeiαk ψk (ξ)eiα − 2keiαk ψk−1 (ξ)(cos(α) + i sen(α))
= 2ξeiαk ψk (ξ)eiα − 2keiαk ψk−1 (ξ)eiα )
= 2ξeiα(k+1) ψk (ξ) − 2keiα(k+1) ψk−1 (ξ))
= eiα(k+1) (2ξψk (ξ) − 2kψk−1 (ξ))
(i)
= eiα(k+1) ψk+1 (ξ).
(i): usando la fórmula de recurrencia para los polinomios de Hermite (1.17)
(ii): por la linealidad de la FrFT (2.24).
(iii): por la regla operacional de la Multiplicación.
(iv): por la hipótesis inductiva (2.27)
(v): usando la fórmula de la derivada para los polinomios de Hermite (1.16)
(vi): por la fórmula de Euler.
53
2.5.
Reglas Operacionales de la Transformada Fraccionaria de Fourier
1. Regla de la Multiplicación
µ
fba {xm f (x)} =
d
ξcos(α) − i sen(α)
dξ
¶m
fba {f (x)}
(2.28)
2. Regla de la Diferenciación
¾ µ
¶m
½ m
d
d
b
fa
f (x) = −iξ sen(α) + cos(α)
fba {f (x)}
dxm
dξ
3. Regla del Producto Mixto
© d
ª
fba x dx
f (x) =
i
d b
d2 b
b
= −(sen (α)+iξ sen(α) cos(α))fa {f (x)}+ξ cos(2α) fa {f (x)}− sen(2α) 2 fa {f (x)}
dξ
2
dξ
2
2
4. Regla de la Multiplicación Chirp
Si g(x) = f (x)ei2πxv entonces
gba (ξ) = e−iπ(v
2
sen(α)−2ξv sen(α)) cot(α)
fba (ξ − v sen(α))
5. Regla del Factor Escalante
Si g(x) = f (cx) entonces
µ
¶
µ
¶
¶
µ
2 (α)
1 − i cot(α) −iπξ2 cot(α) 1− cos
ξ csc(α)
2
cos (β)
b
e
gba (ξ) =
fb
c
c csc(β)
con β =
bπ
.
2
6. Regla de la Traslación
Si g(x) = f (x + b) con b constante entonces
gba (ξ) = eiπ b sen(α) (2ξ+b cos(α)) fba (ξ + b cos(α))
54
7. Regla de la Exponencial
Si g(x) = e−i2π bx f (x) con b constante entonces
gba (ξ) = e−i2πb cos(α) (ξ+ 2 b sen(α)) fba (ξ + b sen(α))
1
Ahora se demostrarán cada una de estas reglas operacionales.
Regla operacional N◦ 1
Primero se demostrará la regla para las funciones Hermite Gaussianas y para m = 1, por lo
tanto, la regla establece lo siguiente:
µ
¶
d b
b
fa {xψn (x)} = ξcos(α) − i sen(α)
fa {ψn (x)}
dξ
Demostración:
Partiendo de la fórmula de recurrencia de las funciones Hermite Gaussiana (1.17), se puede
escribir que
xψn (x) = 2−1 ψn+1 (x) + nψn−1 (x)
Entonces se tiene que
©
ª
fba {xψn (x)} = fba 2−1 ψn+1 (x) + nψn−1 (x)
= 2−1 fba {ψn+1 (x)} + nfba {ψn−1 (x)}
(i)
(ii)
= 2−1 eiα(n+1) ψn+1 (ξ) + neiα(n−1) ψn−1 (ξ)
(iii)
= 2−1 eiα(n+1) (2ξψn (ξ) − 2nψn−1 (ξ)) + neiα(n−1) ψn−1 (ξ)
= ξeiα(n+1) ψn (ξ) − neiα(n+1) ψn−1 (ξ) + neiα(n−1) ψn−1 (ξ)
= ξeiα(n+1) ψn (ξ) − nψn−1 (ξ)(eiα(n+1) − eiα(n−1) )
= ξeiα(n+1) ψn (ξ) − nψn−1 (ξ)eiαn (eiα − e−iα )
(iv)
= ξeiα(n+1) ψn (ξ) − nψn−1 (ξ)eiαn (cos(α) + i sen(α) − (cos(α) − i sen(α)))
= ξeiα(n+1) ψn (ξ) − i2n sen(α) ψn−1 (ξ)eiαn
55
(2.29)
(i): por la propiedad de la Linealidad de la FrFT (2.24)
(ii): usando (2.26)
(iii): por la fórmla de recurrencia de las funciones Hermite Gaussiana (1.17)
(iv): por la fórmula de Euler.
Por otro lado, se tiene que
´
¢
d ¡ iαn
d ³b
(i)
fa {ψn (x)} =
e ψn (ξ)
dξ
dξ
(ii)
= eiαn (−ξψn (ξ) + 2nψn−1 (ξ))
(i): usando (2.26)
(ii): usando (1.16)
Multiplicando la ecuación anterior por i sen(α) se tiene que
´
d ³b
fa {ψn (x)} = i sen(α) eiαn (−ξψn (ξ) + 2nψn−1 (ξ))
i sen(α)
dξ
(2.30)
Ahora sumando (2.29) y (2.30), se obtiene que:
´
d ³b
fba {xψn (x)} + i sen(α)
fa {ψn (x)} =
dξ
= ξeiα(n+1) ψn (ξ) − i2n sen(α) ψn−1 (ξ)eiαn + i sen(α) eiαn (−ξψn (ξ) + 2nψn−1 (ξ))
= ξeiα(n+1) ψn (ξ) − iξ sen(α) eiαn ψn (ξ)
Entonces
´
d ³b
iα(n+1)
iαn
b
fa {xψn (x)} = ξe
ψn (ξ) − iξ sen(α) e ψn (ξ) − i sen(α)
fa {ψn (x)}
dξ
´
d ³b
= ξeiαn ψn (ξ)(eiα − i sen(α)) − i sen(α)
fa {ψn (x)}
dξ
´
d ³b
fa {ψn (x)}
= ξeiαn ψn (ξ)(cos(α) + i sen(α) − i sen(α)) − i sen(α)
dξ
³
´
d b
(i)
= ξ cos(α)fba {ψn (x)} − i sen(α)
fa {ψn (x)}
dξ
µ
¶
d b
=
ξ cos(α) − i sen(α)
(2.31)
fa {ψn (x)} .
dξ
56
(i): usando (2.26)
Ahora, sea f (x) una función de L2 , se debe mostrar que
¶
µ
d b
b
fa {xf (x)} = ξ cos(α) − i sen(α)
fa {f (x)}
dξ
Demostración:
Como las funciones Hermite Gaussianas ψn (x) forman una base ortogonal para L2 entonces
se puede expresar a f (x) como sigue:
f (x) =
∞
X
an ψn (x)
n=0
Entonces
(
fba {xf (x)} = fba
x
∞
X
)
an ψn (x)
n=0
(i)
=
∞
X
n=0
∞
X
an fba {xψn (x)}
¶
¶
d b
an
fa {ψn (x)}
=
ξ cos(α) − isen(α)
dξ
n=0
)
µ
¶ (X
∞
d
(i)
=
ξ cos(α) − i sen(α)
an ψn (x)
fba
dξ
n=0
µ
¶
d b
=
ξ cos(α) − i sen(α)
fa {f (x)} .
dξ
(ii)
µµ
(i): por la Linealidad de la FrFT (2.24)
(ii): usando la regla de multiplicación para las funciones Hermite Gaussianas (2.31)
Finalmente se demostrará la fórmula general de la Regla de la Multiplicación, es decir:
µ
¶m
d
m
b
fba {f (x)}
fa {x f (x)} = ξcos(α) − i sen(α)
dξ
Demostración:
Siguiendo el proceso inductivo, primero se demostrará que la regla es cierta para m = 2,
57
luego se supondrá que es cierta para m = k, y finalmente se demostrará que se cumple para
m = k + 1.
Para m = 2 se debe probar que
©
ª
fba x2 f (x) =
µ
d
ξcos(α) − i sen(α)
dξ
¶2
fba {f (x)}
(2.32)
Entonces se tiene que
©
ª
fba x2 f (x) = fba {x(xf (x))}
µ
¶
d b
fa {xf (x)}
=
ξ cos(α) − i sen(α)
dξ
µ
¶µ
¶
d
d b
fa {f (x)}
=
ξ cos(α) − i sen(α)
ξ cos(α) − i sen(α)
dξ
dξ
µ
¶2
d
=
ξ cos(α) − i sen(α)
fba {f (x)}
dξ
Se supone que la proposición es cierta para m = k, con lo que se tiene
µ
¶k
© k
ª
d
fba x f (x) = ξcos(α) − i sen(α)
fba {f (x)}
dξ
Por último, se debe mostrar que la proposición se cumple para m = k + 1, es decir, se tiene
que mostrar que
©
ª
fba xk+1 f (x) =
µ
d
ξcos(α) − i sen(α)
dξ
¶k+1
fba {f (x)}
©
ª
©
ª
fba xk+1 f (x) = fba xk (xf (x))
µ
¶k
d
(i)
=
ξ cos(α) − i sen(α)
fba {xf (x)}
dξ
µ
¶k µ
¶
d
d b
=
ξ cos(α) − i sen(α)
ξ cos(α) − i sen(α)
fa {f (x)}
dξ
dξ
µ
¶k+1
d
=
ξ cos(α) − i sen(α)
fba {f (x)} .
dξ
58
(i): usando la hipótesis inductiva
Por otra parte, se puede mostrar que la ecuación (2.32) se puede expresar como:
sen 2α
d
d2
(−i + ξ 2 cot(α))fba {f (x)} − iξ sen(2α) fba {f (x)} − sen2 (α) 2 fba {f (x)}
2
dξ
dξ
como lo expresa Victor Namias en [15].
Ahora se realizará la demostración de esta última afirmación.
Demostración:
©
ª
fba x2 f (x) = fba {x(xf (x))}
µ
¶
d b
=
ξ cos(α) − i sen(α)
fa {xf (x)}
dξ
µ
¶µ
¶
d
d b
=
ξ cos(α) − i sen(α)
ξ cos(α) − i sen(α)
fa {f (x)}
dξ
dξ
µ
¶
d
d
d2 b
2
2
2
2
=
ξ cos (α) − iξ cos(α) sen(α) − i sen(α) ξ cos(α) + i sen (α) 2 fa {f (x)}
dξ
dξ
dξ
d
d
= ξ 2 cos2 (α)fba {f (x)} − iξ cos(α) sen(α) fba {f (x)} − i sen(α) cos(α) xfba {f (x)}
dξ
dξ
2
d
− sen2 (α) 2 fba {f (x)}
dξ
Como
d b
d
ξ fa {f (x)} = fba {f (x)} + ξ fba {f (x)}
dξ
dξ
59
entonces
©
ª
d
fba x2 f (x) = ξ 2 cos2 (α)fba {f (x)} − iξ cos(α) sen(α) fba {f (x)} − i sen(α) cos(α)fba {f (x)}
dξ
d
d2
−iξ sen(α) cos(α) fba {f (x)} − sen2 (α) 2 fba {f (x)}
dξ
dξ
d
= (ξ 2 cos2 (α) − i sen(α) cos(α))fba {f (x)} − i2ξ cos(α) sen(α) fba {f (x)}
dξ
2
d
− sen2 (α) 2 fba {f (x)}
dξ
µ
¶
d
2 cos(α)
= sen(α) cos(α) ξ
− i fba {f (x)} − iξ sen(2α) fba {f (x)}
sen(α)
dξ
2
d
− sen2 (α) 2 fba {f (x)}
dξ
sen 2α
d
d2
=
(−i + ξ 2 cot(α))fba {f (x)} − iξ sen(2α) fba {f (x)} − sen2 (α) 2 fba {f (x)} .
2
dξ
dξ
Regla operacional N◦ 2
Primero se mostrará la regla para las funciones Hermite Gaussianas y para m = 1, ası́, la
regla establece lo siguiente:
¾ µ
¶
½
d
d b
b
fa {ψn (x)}
fa
ψn (x) = −iξ sen(α) + cos(α)
dx
dξ
Demostración:
De la ecuación (1.16) se sabe que
0
ψn (x) = −xψn (x) + 2nψn−1 (x)
60
Entonces se tiene que
½
¾
d
ψn (x)
= fba {−xψn (x) + 2nψn−1 (x)}
fba
dx
(i)
= −fba {xψn (x)} + 2nfba {ψn−1 (x)}
µ
¶
d b
(ii)
= − ξ cos(α) − i sen(α)
fa {ψn (x)} + 2nfba {ψn−1 (x)}
dξ
µ
¶
d
(iii)
= − ξ cos(α) − i sen(α)
eiαn ψn (ξ) + 2neiα(n−1) ψn−1 (ξ)
dξ
d
= −ξ cos(α)eiαn ψn (ξ) + i sen(α)eiαn (ψn (ξ)) + 2neiα(n−1) ψn−1 (ξ)
dξ
(iv)
= −ξ cos(α)eiαn ψn (ξ) + i sen(α)eiαn (−ξψn (ξ) + 2nψn−1 (ξ) +
+2neiα(n−1) ψn−1 (ξ)
= −ξ cos(α)eiαn ψn (ξ) − iξ sen(α)eiαn ψn (ξ) + i2n sen(α)eiαn ψn−1 (ξ)) +
+2neiαn e−iα ψn−1 (ξ)
(2.33)
(i): por la propiedad de la Linealidad de la FrFT (2.24)
(ii): usando la regla de la multipicación (2.28)
(iii): usando (2.26)
(iv): por la fórmla de la derivada de las funciones Hermite Gaussianas (1.16)
Por otro lado, se tiene que
´
¢
d ³b
d ¡ iαn
(i)
fa {ψn (x)} =
e ψn (ξ)
dξ
dξ
(ii)
= eiαn (−ξψn (ξ) + 2nψn−1 (ξ))
(i): usando (2.26)
(ii): por la fórmla de la derivada de las funciones Hermite Gaussianas (1.16)
Ahora, multiplicando la ecuación anterior por cos(α) se tiene que
´
d ³b
cos(α)
fa {ψn (x)} = cos(α) eiαn (−ξψn (ξ) + 2nψn−1 (ξ))
dξ
61
(2.34)
Restando
(2.33)
¾ y (2.34), se³obtiene que´
½
d b
d
ψn (x) − cos(α)
fa {ψn (x)} =
fba
dx
dξ
= −ξ cos(α)eiαn ψn (ξ) − iξ sen(α)eiαn ψn (ξ) + i2n sen(α)eiαn ψn−1 (ξ) +
+2neiαn e−iα ψn−1 (ξ) − cos(α) eiαn (−ξψn (ξ) + 2nψn−1 (ξ))
= −iξ sen(α)eiαn ψn (ξ) + i2n sen(α)eiαn ψn−1 (ξ) + 2neiαn e−iα ψn−1 (ξ) −
−2n cos(α) eiαn ψn−1 (ξ)
= −iξ sen(α)eiαn ψn (ξ) + (i sen(α) + e−iα − cos(α)) 2neiαn ψn−1 (ξ)
(i)
= −iξ sen(α)eiαn ψn (ξ) + (i sen(α) + cos(α) − i sen(α) − cos(α)) 2neiαn ψn−1 (ξ)
= −iξ sen(α)eiαn ψn (ξ)
Entonces
½
fba
¾
´
d
d ³b
iαn
fa {ψn (x)}
ψn (x)
= −iξ sen(α)e ψn (ξ) + cos(α)
dx
dξ
´
d ³b
(ii)
b
= −iξ sen(α)fa {ψn (x)} + cos(α)
fa {ψn (x)}
dξ
µ
¶
d b
fa {ψn (x)} .
=
−iξ sen(α) + cos(α)
dξ
(2.35)
(i): por la fórmula de Euler.
(ii): usando (2.26)
Ahora, sea f (x) una función de L2 , se debe mostrar que
¾ µ
¶
½
d b
d
b
f (x) = −iξ sen(α) + cos(α)
fa {f (x)}
fa
dx
dξ
Demostración:
Como las funciones Hermite Gaussianas ψn (x) forman una base ortogonal para L2 , entonces
se sabe que se puede expresar a f (x) como sigue:
f (x) =
∞
X
n=0
62
an ψn (x)
Entonces
½
fba
(
)
¾
∞
X
d
d
f (x)
= fba
an ψn (x)
dx
dx n=0
½
¾
∞
X
d
(i)
b
=
an fa
ψn (x)
dx
n=0
µµ
¶
¶
∞
X
d b
(ii)
−iξ sen(α) + cos(α)
=
an
fa {ψn (x)}
dξ
n=0
)
µ
¶ (X
∞
d b
(i)
=
−iξ sen(α) + cos(α)
fa
an ψn (x)
dξ
n=0
µ
¶
d b
=
−iξ sen(α) + cos(α)
fa {f (x)} .
dξ
(i): por la Linealidad de la FrFT (2.24)
(ii): usando la regla de diferenciación para las funciones Hermite Gaussianas (2.35)
Finalmente se demostrará la forma general de la Regla de la Diferenciación:
¾ µ
¶m
½ m
d
d
b
fba {f (x)}
fa
f (x) = −iξ sen(α) + cos(α)
dxm
dξ
Demostración:
Siguiendo el proceso inductivo, primero se demostrará que la regla es cierta para m = 2,
luego se supondrá que la proposición es cierta hasta m = k, para finalmente mostrar que la
proposición se cumple para m = k + 1.
Para m = 2 se debe probar que
½ 2
¾ µ
¶2
d
d
b
fa
f (x) = −iξ sen(α) + cos(α)
fba {f (x)}
dx2
dξ
63
entonces
½ 2
¾
½ µ
¶¾
d
d
d
f (x)
= fba
f (x)
fba
dx2
dx dx
µ
=
−iξ sen(α) + cos(α)
µ
=
−iξ sen(α) + cos(α)
µ
=
−iξ sen(α) + cos(α)
¶ ½
¾
d b d
fa
f (x)
dξ
dx
¶µ
¶
d b
d
−iξ sen(α) + cos(α)
fa {f (x)}
dξ
dξ
¶2
d
fba {f (x)}
dξ
Se supone que la proposición es cierta hasta m = k, esto es
½
fba
¾ µ
¶k
dk
d
fba {f (x)}
f (x) = −iξ sen(α) + cos(α)
dxk
dξ
Por último se debe mostrar que la proposición se cumple para m = k + 1, es decir, se tiene
que mostrar que
½
fba
½
fba
d k+1
f (x)
dxk+1
¾ µ
¶k+1
d
d k+1
f (x) = −iξ sen(α) + cos(α)
fba {f (x)}
dxk+1
dξ
¾
½
= fba
µ
(i)
=
µ
=
µ
=
dk
dxk
µ
¶¾
d
f (x)
dξ
d
−iξ sen(α) + cos(α)
dξ
d
−iξ sen(α) + cos(α)
dξ
d
−iξ sen(α) + cos(α)
dξ
(i): usando la hipótesis inductiva
Regla operacional N◦ 3
64
¶k
½
fba
¶k µ
¶k+1
¾
d
f (x)
dx
d
−iξ sen(α) + cos(α)
dξ
fba {f (x)} .
¶
fba {f (x)}
Demostración:
¾
µ
¾
¶ ½
½
d b d
d
b
=
ξ cos(α) − i sen(α)
fa x f (x)
fa
f (x)
dx
dξ
dx
µ
¶µ
¶
d
d b
=
ξ cos(α) − i sen(α)
−iξ sen(α) + cos(α)
fa {f (x)}
dξ
dξ
µ
¶
d
d
d2 b
2
2
2
2
=
−iξ cos(α) sen(α) + ξ cos (α) + i sen (α) ξ − i sen(α) cos(α) 2 fa {f (x)}
dξ
dξ
dξ
d
d
= −iξ 2 cos(α) sen(α)fba {f (x)} + ξ cos2 (α) fba {f (x)} − sen2 (α) ξ fba {f (x)}
dξ
dξ
2
d
−i sen(α) cos(α) 2 fba {f (x)}
dξ
Por otra parte se sabe que
d b
d
ξ fa {f (x)} = fba {f (x)} + ξ fba {f (x)}
dξ
dξ
Entonces
½
¾
d
d
b
fa x f (x)
= −iξ 2 cos(α) sen(α)fba {f (x)} + ξ cos2 (α) fba {f (x)} − sen2 (α)fba {f (x)}
dx
dξ
d
d2
−ξ sen2 (α) fba {f (x)} − i sen(α) cos(α) 2 fba {f (x)}
dξ
dξ
d
= (−iξ 2 cos(α) sen(α) − sen2 (α))fba {f (x)} + (ξ cos2 (α) − ξ sen2 (α)) fba {f (x)}
dξ
2
i
d
− sen(2α) 2 fba {f (x)}
2
dξ
d
= −(sen2 (α) + iξ 2 sen(α) cos(α))fba {f (x)} + ξ cos(2α) fba {f (x)}
dξ
2
d
i
− sen(2α) 2 fba {f (x)} .
2
dξ
Regla operacional N◦ 4
Demostración:
65
Se parte escribiendo el significado de fba (ξ − v sen(α))
Z ∞
2
2
fba (ξ − v sen(α)) = cα
e−iπ(2x(ξ−v sen(α)) csc(α)−(x +(ξ−v sen(α)) ) cot(α)) f (x) dx
Z−∞
∞
2
2
2
2
= cα
e−iπ(2xξ csc(α)−2xv sen(α) csc(α)−(x +ξ −2ξv sen(α)+v sen (α)) cot(α)) f (x) dx
Z−∞
∞
2
2
2
2
= cα
e−iπ(2xξ csc(α)−(x +ξ ) cot(α)−2xv−(−2ξv sen(α)+v sen (α)) cot(α)) f (x) dx
Z−∞
∞
2
2
2
2
= cα
e−iπ(2xξ csc(α)−(x +ξ ) cot(α)) e2iπxv eiπ(−2ξv sen(α)+v sen (α)) cot(α) f (x) dx
−∞
Z ∞
2
2
iπ(−2ξv sen(α)+v 2 sen2 (α)) cot(α)
= e
cα
e−iπ(2xξ csc(α)−(x +ξ ) cot(α)) ei2πxv f (x) dx
−∞
iπ(−2ξv sen(α)+v 2 sen2 (α)) cot(α)
(i)
= e
gba (ξ)
Luego
e−iπ(v
2
sen(α)−2ξv sen(α)) cot(α)
fba (ξ − v sen(α)) = gba (ξ).
Ası́ se llega finalmente a lo que se querı́a mostar.
(i): usando que g(x) = f (x)e2iπxv
Regla operacional N◦ 6
Demostración:
Z
∞
gba (ξ) = cα
2 +ξ 2 ) cot(α))
e−iπ(2xξ csc(α)−(x
f (x + b) dx
−∞
aplicando el cambio de variables y = x + b se tiene que x = y − b y dy = dx. Ası́ se obtiene
que
Z
∞
gba (ξ) = cα
Z−∞
∞
= cα
e−iπ(2(y−b)ξ csc(α)−((y−b)
2 +ξ 2 ) cot(α))
e−iπ(2yξ csc(α) − 2bξ csc(α) − y
−∞
66
2
f (y) dy
cot(α) + 2yb cot(α) − b2 cot(α) − ξ 2 cot(α))
f (y) dy
Ahora se multiplica a cada lado de la ecuación anterior por el término e−iπ b sen(α) (2ξ+b cos(α)) .
Ası́ se obtiene que:
e−iπ b sen(α) (2ξ+b cos(α)) gba (ξ) =
Z
−iπ b sen(α) (2ξ+b cos(α))
= e
Z
∞
= cα
Z−∞
∞
= cα
Z−∞
∞
= cα
∞
cα
e−iπ(2yξ csc(α) − 2bξ csc(α) − y
2
cot(α) + 2yb cot(α) − b2 cot(α) − ξ 2 cot(α))
f (y) dy
−∞
e−iπ(2yξ csc(α) − 2bξ csc(α) − y
2
cot(α) + 2yb cot(α) − b2 cot(α) − ξ 2 cot(α) + 2b ξ sen(α) +b2 sen(α) cos(α))
2
cot(α) − ξ 2 cot(α) − 2bξ csc(α) + 2b ξ sen(α) − b2 cot(α) + b2 sen(α) cos(α))
e−iπ(2yξ csc(α) + 2yb cot(α) − y
e−iπ(2y(ξ csc(α) + b cot(α)) − y
2
cot(α) − ξ 2 cot(α) − 2bξ(csc(α) − sen(α)) − b2 (cot(α) − sen(α) cos(α)))
f (y) dy
f (y) dy
f (y) dy
−∞
(2.36)
Ahora se usarán las siguientes identidades trigonométricas:
cot(α) =
csc(α) − sen(α) =
cos(α)
1
= cos(α)
= cos(α) csc(α).
sen(α)
sen(α)
1
1 − sen2 (α)
cos2 (α)
− sen(α) =
=
= cot(α) cos(α).
sen(α)
sen(α)
sen(α)
(2.37)
(2.38)
cos(α)
cos(α) − sen2 (α) cos(α)
− sen(α) cos(α) =
sen(α)
sen(α)
2
2
cos(α)(1 − sen (α))
cos(α) cos (α)
=
= cos2 (α) cot(α).
=
sen(α)
sen(α)
(2.39)
cot(α) − sen(α) cos(α) =
67
Entonces utilizando (2.37), (2.38), (2.39) en (2.36) se llega a que
e−iπ b sen(α) (2ξ+b cos(α)) gba (ξ) =
Z ∞
2
2
2
2
= cα
e−iπ(2y(ξ csc(α) + b cos(α) csc(α)) − y cot(α) − ξ cot(α) − 2bξ cot(α) cos(α) − b cos (α) cot(α)) f (y) dy
Z−∞
∞
2
2
2
2
= cα
e−iπ(2y(ξ + b cos(α)) csc(α) − y cot(α) − (ξ + 2ξb cos(α) + b cos (α)) cot(α)) f (y) dy
Z−∞
∞
2
2
= cα
e−iπ(2y(ξ + b cos(α)) csc(α) − y cot(α) − (ξ+ b cos(α)) cot(α)) f (y) dy
Z−∞
∞
2
2
= cα
e−iπ(2y(ξ + b cos(α)) csc(α) − (y + (ξ+ b cos(α)) ) cot(α)) f (y) dy
−∞
= fba (ξ + b cos(α))
Ası́ se obtiene que
e−iπ b sen(α) (2ξ+b cos(α)) gba (ξ) = fba (ξ + b cos(α))
y se demostró lo que se querı́a
gba (ξ) = eiπ b sen(α) (2ξ+b cos(α)) fba (ξ + b cos(α)).
Regla operacional N◦ 7
Demostración:
Z
∞
gba (ξ) = cα
Z−∞
∞
= cα
2 +ξ 2 ) cot(α))
e−iπ(2xξ csc(α)−(x
e−i2π bx f (x) dx
2 +ξ 2 ) cot(α)+2bx)
e−iπ(2xξ csc(α)−(x
f (x) dx
−∞
1
Ahora se multiplica a cada lado de la ecuación anterior por el término ei2πb cos(α) (ξ+ 2 b sen(α))
y se obtiene que:
68
1
ei2πb cos(α) (ξ+ 2 b sen(α)) gba (ξ) =
Z
i2πb cos(α) (ξ+ 12 b sen(α))
= e
Z
∞
= cα
Z−∞
∞
= cα
∞
cα
2 +ξ 2 ) cot(α)+2bx)
e−iπ(2xξ csc(α)−(x
f (x) dx
−∞
2
e−iπ(2xξ csc(α) − x
cot(α) − ξ 2 cot(α) + 2bx − 2bξ cos(α) − b2 cos(α) sen(α))
e−iπ(2x(ξ csc(α) + b)− x
2
cot(α) − ξ 2 cot(α) − 2bξ cos(α) − b2 cos(α) sen(α))
f (x) dx
f (x) dx
(2.40)
−∞
Ahora se escribirán las siguientes identidades trigonométricas:
1 = sen(α)
1
= sen(α) csc(α).
sen(α)
cos(α) = sen(α)
cos(α)
= sen(α) cot(α).
sen(α)
sen(α) cos(α) = sen2 α
cos(α)
= sen2 α cot(α).
sen(α)
(2.41)
(2.42)
(2.43)
y aplicando (2.41), (2.42), (2.43) en (2.40) se llega a que
1
ei2π cos(α) (ξ+ 2 b sen(α)) gba (ξ) =
Z ∞
2
2
2
2
= cα
e−iπ(2x(ξ csc(α) + b sen α csc α)− x cot(α) − ξ cot(α) − 2bξ sen(α) cot(α) − b sen α cot(α)) f (x) dx
Z−∞
∞
2
2
2
2
= cα
e−iπ(2x(ξ + b sen(α)) csc(α) − (x + ξ + 2bξ sen(α) + b sen α) cot(α)) f (x) dx
Z−∞
∞
2
2
= cα
e−iπ(2x(ξ + b sen(α)) csc(α) − (x + (ξ + b sen(α)) ) cot(α)) f (x) dx
−∞
= fba (ξ + b sen(α))
Por lo tanto
ei2πb cos(α) (ξ+ 2 b sen(α)) gba (ξ) = fba (ξ + b sen(α))
1
es decir
gba (ξ) = e−i2πb cos(α) (ξ+ 2 b sen(α)) fba (ξ + b sen(α)).
1
69
Capı́tulo 3
Aplicación de la Transformada
Fraccionaria de Fourier en
Watermarking
En este capı́tulo se abordará uno de los campos donde la transformada fraccionaria
de Fourier tiene aplicación, se trata de watermarking. Primero se explicará lo que son las
marcas de agua digitales o watermarking. Para esto, se dará una pequeña introducción,
definición, inicios, aplicaciones, caracterı́sticas, y clasificación de las watermarking. Luego se
estudiará una técnica de watermarking usando transformada fraccionaria de Fourier, con el
fin de crear un programa donde se implemente esta técnica.
3.1.
Introducción
Desde la antigüedad, cualquiera que tuviera o produjera un documento u obra de arte de
algún valor estaba interesado en marcarlo con un sello o código con el objetivo de establecer
su propiedad y su autenticidad en caso de copia o robo. Con la evolución tecnológica, el
70
rápido crecimiento del Internet junto con la posibilidad de digitalización de cualquier tipo
de información, además de poder realizar modificaciones o copias con una calidad idéntica a
la del original, se hace necesaria la creación de mecanismos de protección de los derechos de
la propiedad intelectual.
3.2.
Definición
Watermarking digital (o marcas de agua) es un código de información que es incluido
en un archivo multimedia de manera que sea preferiblemente no perceptible para el humano
pero sı́ fácilmente detectable por un computador. El tipo de información incrustada en el
archivo dependerá de la aplicación que se le dará a la marca de agua.
Todas las técnicas de Watermarking están formadas por dos procesos: El proceso de inserción
o codificación y el proceso de extracción o identificación. El proceso de inserción realiza la
inclusión de la marca de agua X en el archivo original A para producir el archivo marcado
A∗ . Por lo general, es asociada a este proceso una clave con el objeto de aumentar la seguridad. Ver Figura 3.1.
El proceso de identificación, dependiendo del proceso de codificación y del uso de la Watermarking, extrae la marca X o calcula un parámetro que dirá si la marca está presente en el
archivo estudiado.
3.3.
Inicios
Se puede atribuir la creación del Watermarking digital a Emil Hembrooke de Muzac
Corporation, quien en 1954 presentó una patente titulada “Identification of sound and like
signals”[10], en la cual se describe un método para incluir dentro de un dispositivo que con-
71
Figura 3.1: Esquema del proceso de watermarking.
tenı́a música, un código imperceptible con el objeto de probar la autorı́a de la pieza.
Sin embargo, no fue hasta 1990 cuando el interés por Watermarking digital tuvo un gran
auge convirtiéndose en un tópico importante de investigación. Este auge fue motivado por
grupos como Copy Protection Technical Working Group (CPTWG), Strategic Digital Music
Initiative (SDMI) y Recording Industry Association of America (RIAA) entre otros, quienes
estaban preocupados por el incremento en la violación de los derechos de autor.
72
3.4.
Aplicaciones
Entre las principales aplicaciones de la Watermarking se encuentran las siguientes:
Verificación de propiedad
La marca de agua se usa como una firma que demuestra quién es el propietario de la
información. En este caso la marca podrı́a ser visible o invisible.
Identificación de originales, detección de alteraciones
La marca de agua actúa de forma que se pueda asegurar la autenticidad de la información, por ejemplo en pruebas judiciales, reclamos a seguros, fotografı́a periodı́stica.
Detección de copia y distribución no autorizada
La marca de agua se usa como una firma distintiva de cada copia, lo que permite saber
quién es el propietario original de una copia pirata.
Etiquetado de contenido
La marca de agua incluye datos adicionales del archivo donde está guardada, por
ejemplo en un archivo MP3 puede estar guardado el tı́tulo de la canción, el autor y
hasta una foto de la portada del disco a la que pertenece la pieza.
Ocultar información
Este tipo de marcas se usan para transmitir mensajes ocultos. Para un ejemplo, ver
Figura 3.2
3.5.
Caracteristicas
Existen varias caracterı́sticas importantes que deben estar presentes en una Watermarking para garantizar su efectividad. Para este trabajo se destacan las siguientes:
73
Figura 3.2: Esquema para ocultar una foto dentro de otra como una watermarking.
Grado de Robustez
Se refiere a que debe ser difı́cil distorsionar la marca hasta el punto de hacerla indetectable o eliminarla totalmente.
Costo computacional
Es importante que el tiempo empleado en el proceso de inserción de la marca, y especialmente en el proceso de detección, sea el menor posible.
Ambigüedad
La probabilidad de fallar detectando la marca, es decir un falso negativo, y de detectarla
cuando realmente no existe, es decir, un falso positivo, deben ser muy bajas.
Invisible a nivel estadı́stico
Si todos los productos marcados con una clave presentan una misma caracterı́stica
común, resultará sencillo detectar la protección si se dispone de un número considerable
de productos marcados. Para evitarlo, puede usarse una marca de agua que dependa
del contenido de la información. De esta forma, si se dispone por ejemplo de N imágenes
74
diferentes, no podrá extraerse la marca como aquella parte común a todas ellas, ya que
cada marca depende del contenido de su propia imagen.
3.6.
Clasificación
Estas técnicas de Watermarking Digital pueden ser aplicadas a diferentes tipos de archivos:
textos, sonidos, imágenes y videos.
Según el proceso de Inserción, las Watermarking pueden ser clasificadas en dos categorı́as:
Técnicas en el Dominio del Espacio
Son las más sencillas, la marca modifica directamente el valor de crominancia de los
pı́xeles.
Técnicas en el Dominio de la Frecuencia:
Emplean una transformación lineal e invertible para convertir los valores de la imagen
(pı́xeles) del dominio tiempo al dominio frecuencia. La marca modifica directamente
el valor de los coeficientes espectrales de la imagen. La mayor parte de las técnicas
desarrolladas en este dominio están inspiradas en métodos de codificación y compresión.
Aquı́ se puede destacar la siguiente subclasificación:
• Transformada Discreta del Coseno
• Transformada Discreta de Wavelet
• Transformada Discreta de Fourier
• Transformada Discreta Fracionaria de Fourier
Para mayor información sobre las aplicaciones y la clasificación de las watermarking se puede
consultar [8, 4, 2, 3, 9, 6, 22, 12]
75
3.7.
Algoritmo
El método descrito por Djurovic, Stankovic, y Pitas [8] está enmarcado en watermarking
para imágenes, en particular para imágenes en blanco y negro y utiliza el dominio fraccionario
de Fourier. Al estar trabajando sobre imágenes es necesario utilizar la FrFT bidimensional por
lo que se emplearán dos ángulos (α y β) para hacer los cálculos. Este método está basado en
una técnica de correlación donde se marca la imagen con un patrón de ruido pseudoaleatorio.
Un patrón pseudoaleatorio es aquel que, partiendo de un valor inicial llamado semilla, va
generando una sucesión de números. Siempre que se parta de la misma semilla, se obtendrá la
misma secuencia de números. Para crear la imagen marcada I*, el ruido pseudoaleatorio
M es multiplicado por una constante k y luego sumado a la imagen a marcar I, es decir,
I*=I+kM. Para detectar la imagen marcada se utiliza la correlación entre ella y el ruido
pseudoaleatorio. Durante el proceso de detección, el valor de la correlación va a ser alto para
el ruido pseudoaleatorio generado con la semilla correcta y bajo para el caso contrario.
A continuación se deescriben los dos procesos involucrados en esta técnica de watermarking, a saber, el proceso de inserción o codificación y el proceso de extracción o identificación.
Proceso de Inserción:
1. Leer la imagen a marcar “ Im ”
2. Crear la marca “ M ”
3. Calcular “ ImT ”que es la transformada fraccionaria de Fourier de “ Im ”
4. Insertar la marca “ M ” dentro de “ ImT ” para producir “ ImT* ”
76
5. Calcula la transformada fraccionaria de Fourier inversa de “ ImT* ” para generar
“ Im* ”
6. Mostrar la imagen marcada “ Im* ”
Proceso de Extracción:
1. Leer la imagen a estudiar “ Im** ”
2. Leer la marca “ M ” que debe ser reconocida en la supuesta imagen marcada
“ Im** ”
3. Calcular el ı́ndice de correlación “ d ” entre la marca “ M ” y la imagen a estudiar
“ Im** ”
4. Dar la respuesta del análisis, que será “ SI ” en caso que el valor de “ d ” sea alto
y “ NO ” en caso contrario
Este algoritmo fue programado en MatLab y el código se encuentra en la sección de anexos.
3.8.
Resultados
En esta sección se presentan los resultados obtenidos con la implementación de este algoritmo. Es importante señalar que estos son resultados preliminares. La finalidad del estudio
en este campo de aplicación es proponer un nuevo algoritmo que mejore el desempeño de los
que existen actualmente, pero esto quedara para futuras investigaciones.
A continuación se tomarà una foto y se le insertará una marca usando los ángulos α = 0.3 π2
y β = 0.6 π2 . Por razones evidentes se empleará una marca que resultará visible en la foto.
En la Figura 3.3 (a) está la foto original y en la Figura 3.3 (b) se muestra la foto marcada.
77
Por otro lado, en la Figura 3.4 (a) se presenta la gráfica de los coeficientes de la transformada
fraccionaria de Fourier para la foto original y en la Figura 3.4 (b) se muestra la gráfica de
los coeficientes de la transformada de Fourier de la imagen marcada. Al comparar ambas
gráficas resulta evidente reconocer qué parte corresponde a la marca (pico), además, como se
puede ver en la Figura 3.4 (a), los valores observados tienen un máximo de aproximadamente
220 mientras que en la Figura 3.4 (b) se ve que el pico tienen un valor aproximado de 1500,
con lo que se está en presencia de un valor significativamente distinto al resto.
Ahora, en la Figura 3.5 se presentan diferentes gráficas para los coeficientes de la transformada fraccionaria de Fourier de la foto marcada, pero usando ángulos distintos a los usados
para la inserción de la marca, como resulta evidente, sólo cuando son usados los ángulos
correctos se puede identificar la marca sin posibilidad de error, en los otros casos no hay una
diferencia tan significativa entre algún pico y el resto de los valores.
(a)
(b)
Figura 3.3: (a) Foto original. (b) Foto marcada
78
Figura 3.4: (a) FrFt de la Foto original. (b) FrFt de la Foto marcada
79
Figura 3.5: FrFT de la imagen marcada con diferentes ángulos.
80
Conclusiones
En este trabajo, se estudiaron aspectos teóricos de la transformada fraccionaria de Fourier, ası́ como también, se inició el estudio en uno de los campos de su aplicación. Debido
a que la gran mayorı́a de los resultados exhibidos en los artı́culos que abordan a la FrFT
están enunciados sin demostración y para el resto de ellos sólo se ofrece un boceto de su
demostración, el centro de este trabajo fue la formalización de las demostraciones de estos
resultados teóricos. Ası́, se demostraron todas las propiedades del Kernel de la FrFT tomando
en cuenta la totalidad de los casos que se generan de su definición. Estas propiedades fueron
la base para la demostración de las propiedades de la FrFT. También fueron demostradas
las reglas operacionales de la FrFT, y de igual manera, se calculó en detalle la FrFT para un
grupo de funciones básicas.
El estudio de la aplicación de la FrFT se centró en el tema de marcas de agua digitales (watermarking). Se realizó una investigación exploratoria para conocer este tema, entendiendo la
evolución que ha tenido hasta el momento y los problemas abiertos que existen actualmente.
Luego de este primer acercamiento, el trabajo se enfocó en el de I. Djurovic, S. Stankovic, y I.
Pitas [8], obteniendo como resultado la implementación en MatLab del algoritmo propuesto
por ellos y realizando varias problemas test para efectuar pruebas iniciales.
81
Anexos
1. Código en Matlab para las gráficas de los primeros 6 polinomios de Hermite
x=-10:0.01:10;
H0=1;
H1=2*x;
H2=4*x.^2-2;
H3=8*x.^3-12.*x;
H4=16*x.^4-48*x.^2+12;
H5=32*x.^5-160*x.^3+120*x;
figure;
subplot(3,2,1);plot(x,H0);title(’H0(x)’);
subplot(3,2,2);plot(x,H1);title(’H1(x)’);
subplot(3,2,3);plot(x,H2);title(’H2(x)’);AXIS([-4 4 -10 60]);
subplot(3,2,4);plot(x,H3);title(’H3(x)’);AXIS([-2 2 -60 60]);
subplot(3,2,5);plot(x,H4);title(’H4(x)’);AXIS([-2.3 2.3 -40 80]);
subplot(3,2,6);plot(x,H5);title(’H5(x)’);AXIS([-2.3 2.3 -150 150])
82
2. Código en Matlab para generar las gráficas del Kernel de la FrFT con α = a π2
[u,v]=meshgrid(-1:0.01:1);
a=[0.05 0.1 0.5 0.9 1.3 1.7 1.9 1.95];
figure;
for t=1:8
alfa=a(t)*pi/2;
k=sqrt(1-i*cot(alfa))*exp(-i*pi*(2*csc(alfa)*
u.*v-(u.^2 + v.^2)*cot(alfa)));
subplot(4,2,t);mesh(real(k));
AXIS([0 220 0 300]);
VIEW(-10,60)
ylabel([’a = ’,num2str(a(t))])
end
figure;
for t=1:8
alfa=a(t)*pi/2;
k=sqrt(1-i*cot(alfa))*exp(-i*pi*(2*csc(alfa)*
u.*v-(u.^2 + v.^2)*cot(alfa)));
subplot(4,2,t);mesh(imag(k));
AXIS([0 220 0 300]);
VIEW(-10,60)
ylabel([’a = ’,num2str(a(t))])
end
83
3. Código en Matlab para generar las gráficas de la FrFT para f (u) = 1
u=-4:0.01:4; filas=3;
for t=1:3
alfa=0.25*t*pi/2;
z=sqrt(1+i*tan(alfa)).*exp(-i*pi*u.^2*tan(alfa));
subplot(filas,2,2*t-1);plot(u,real(z));
title([’a=’,num2str(0.25*(t-1)),’ (parte real)’]);
subplot(filas,2,2*t);plot(u,imag(z));
title([’a=’,num2str(0.25*(t-1)),’ (parte imaginaria)’]);
end
4. Código en Matlab para generar las gráficas de la FrFT para f (u) = δ(u)
figure; u=-4:0.01:4; c=0.9; b=0.1;
for t=1:3
alfa=0.25*t*pi/2;
z = sqrt(1-i*cot(alfa)).*exp(i*pi*u.^2.*cot(alfa));
subplot(filas,2,2*t-1);plot(u,real(z));
title([’a=’,num2str(0.25*t),’ (parte real)’]);
subplot(filas,2,2*t);plot(u,imag(z));
title([’a=’,num2str(0.25*t),’ (parte imaginaria)’]);
end
84
5. Código en Matlab para generar las gráficas de la FrFT para f (x) = eiπ(χx
χ=λ=
2 +2λx)
con
1
2
figure; u=-4:0.01:4; c=0.5; b=0.5;
for t=1:3
alfa=0.25*t*pi/2;
z=sqrt((1+i*tan(alfa))./(1+c.*tan(alfa))).*exp(i*pi*(u.^2.*(c-tan(alfa))
+2*u*b.*sec(alfa)-b.^2.*tan(alfa))./(1+c.*tan(alfa)));
subplot(filas,2,2*t-1);plot(u,real(z));
title([’a=’,num2str(0.25*t),’ (parte real)’]);
subplot(filas,2,2*t);plot(u,imag(z));
title([’a=’,num2str(0.25*t),’ (parte imaginaria)’]);end
6. Código en Matlab para generar las gráficas de la FrFT para f (x) = e−π(χx
χ=λ=
2 +2λx)
con
1
2
figure; u=-4:0.01:4; c=0.5; b=0.5;
for t=1:3
alfa=0.25*t*pi/2;
z=sqrt((1-i*cot(alfa))./(c-i.*cot(alfa))).*exp(pi*u.^2*(i*c*cot(alfa)-1)
+pi*b.^2+2*i*pi*u*b.*csc(alfa)./(c-i.*cot(alfa)));
subplot(filas,2,2*t-1);plot(u,real(z));
title([’a=’,num2str(0.25*t),’ (parte real)’]);
subplot(filas,2,2*t);plot(u,imag(z));
title([’a=’,num2str(0.25*t),’ (parte imaginaria)’]);end
85
7. Código en Matlab del algoritmo descrito en el artı́culo de Djurovic, Stankovic, y Pitas
function WM4(ang1,ang2);
x=imread(’lena.tiff’);
ximg=double(x)/255;
M=8000;L=M;
%marca= WGN(1, M, 0.04,’complex’);
marca = sqrt(0.04)*randn(1,M)+i*sqrt(0.04)*randn(1,M);
% Dimensiones
dimximg=size(ximg);
% Transformada
tx_a=fracF2D(ximg,ang1,ang2);
tx_b=uDFRFT2D(ximg,ang1,ang2);
% Pasar a vector columna
vtx_a=tx_a(:);
vtx_b=tx_b(:);
% Ordenar el vector de manera ascendente
[svtx_a,inx_a]=sort(vtx_a);
[svtx_b,inx_b]=sort(vtx_b);
% Colocar el vector en orden descendente
svtx_a=flipud(svtx_a);
86
svtx_b=flipud(svtx_b);
copia_svtx_a=svtx_a;
copia_svtx_b=svtx_b;
% Incluir la marca en el vector
svtx_a(L+1:L+M)=svtx_a(L+1:L+M)+real(marca).’.*abs(real(svtx_a(L+1:L+M)))
+i*imag(marca).’.*abs(imag(svtx_a(L+1:L+M)));
svtx_b(L+1:L+M)=svtx_b(L+1:L+M)+real(marca).’.*abs(real(svtx_b(L+1:L+M)))
+i*imag(marca).’.*abs(imag(svtx_b(L+1:L+M)));
%calculo de los valores de "d" y "ed" usando fracF2D
disp(’Calculo d y ed para la imagen original usando fracF2D’);
d=sum(conj(marca).*svtx_a(L+1:L+M)’)
ed=sum(abs(real(svtx_a(L+1:L+M))))+sum(abs(imag(svtx_a(L+1:L+M))))
disp(’Calculo d y ed para la imagen original usando uDFRFT2D’);
d=sum(conj(marca).*svtx_b(L+1:L+M)’)
ed=sum(abs(real(svtx_b(L+1:L+M))))+sum(abs(imag(svtx_b(L+1:L+M))))
% Volver al orden inicial del vector
vtx2_a(inx_a)=flipud(svtx_a);
vtx2_b(inx_b)=flipud(svtx_b);
% Volver a la matriz
ximg2_a=reshape(vtx2_a,dimximg(1),dimximg(2));
87
ximg2_b=reshape(vtx2_b,dimximg(1),dimximg(2));
% Grafica de los coeficientesde la transformada ordenados, sin marca
figure;subplot(2,2,1);plot(real(copia_svtx_a));
title(’Coeficientes de la Transformada ordenada, sin marca
(vector)
usando fracF2D’);
% Grafica de los coeficientesde la transformada ordenados y marcados
subplot(2,2,2);plot(real(svtx_a));
title(’Coeficientes de la Transformada ordenada y marcada
(vector) usando fracF2D’);
% Grafica de los coeficientesde la transformada ordenados, sin marca
subplot(2,2,3);plot(real(copia_svtx_b));
title(’Coeficientes de la Transformada ordenada, sin marca
(vector) usando uDFRFT2D’);
% Grafica de los coeficientesde la transformada ordenados y marcados
subplot(2,2,4);plot(real(svtx_b));
title(’Coeficientes de la Transformada ordenada y marcada
(vector) usando uDFRFT2D’);
% Inversa de la Transformada
%iximg=ifft2(ximg2);
iximg_a=fracF2D(ximg2_a,-ang1,-ang2);
iximg_b=uDFRFT2D(ximg2_b,-ang1,-ang2);
% Imprimir imagen marcada
88
figure;subplot(2,2,1);imshow(ximg);title(’Imagen Original’);
subplot(2,2,3);imshow(iximg_a);title(’Imagen Marcada usando fracF2D’);
subplot(2,2,4);imshow(iximg_b);title(’Imagen Marcada usando uDFRFT2D’);
% Grafica de los coeficientesde la transformada ordenados, sin marca
figure;subplot(2,2,1);mesh(abs(tx_a));
title(’Coeficientes de la Transformada sin marca
(matriz) usando fracF2D’);
% Grafica de los coeficientesde la transformada ordenados y marcados
subplot(2,2,2);mesh(abs(ximg2_a));
title(’Coeficientes de la Transformada marcada
(matriz) usando fracF2D’);
% Grafica de los coeficientesde la transformada ordenados, sin marca
subplot(2,2,3);mesh(abs(tx_b));
title(’Coeficientes de la Transformada sin marca
(matriz) usando uDFRFT2D’);
% Grafica de los coeficientesde la transformada ordenados y marcados
subplot(2,2,4);mesh(abs(ximg2_b));
title(’Coeficientes de la Transformada marcada
(matriz) usando uDFRFT2D’);
% Grafica de la imagen original (matriz)
figure;subplot(2,2,1);mesh(abs(ximg));
title(’Imagen Original (matriz)’);
%
Grafica de la imagen marcada (matriz)
89
subplot(2,2,3);mesh(abs(iximg_a));
title(’Imagen Marcada (matriz) usando fracF2D’);
%
Grafica de la imagen marcada (matriz)
subplot(2,2,4);mesh(abs(iximg_b));
title(’Imagen Marcada (matriz) usando uDFRFT2D’);
disp(’Calculo d y ed para la imagen original usando fracF2D’);
Calcular_d(L,M,ximg,marca,ang1,ang2,1);
disp(’Calculo d y ed para la imagen marcada usando fracF2D’);
Calcular_d(L,M,iximg_a,marca,ang1,ang2,1);
disp(’Calculo d y ed para la imagen original usando uDFRFT2D’);
Calcular_d(L,M,ximg,marca,ang1,ang2,2);
disp(’Calculo d y ed para la imagen marcada usando uDFRFT2D’);
Calcular_d(L,M,iximg_b,marca,ang1,ang2,2);
function Calcular_d(L,M,img,marca,ang1,ang2,tipo)
% para hacer los calculos sobre los valores de la imagen transformadas
if tipo==1
t=fracF2D(img,ang1,ang2);
else
t=uDFRFT2D(img,ang1,ang2);
end
vt=t(:);
svt=sort(vt);
svt=flipud(svt)’;
90
d=sum(conj(marca).*svt(L+1:L+M))
ed=sum(abs(real(svt(L+1:L+M))))+sum(abs(imag(svt(L+1:L+M))))
return
91
Referencias
[1] Almeida L.B. (1994). The fractional Fourier transform and time-frequency representation. IEEE Trans. Sig. Proc.
[2] Altun O., Sharma G., and Bocko M. (2002). Informed watermark embedding in the fractional Fourier domain. Department of Electrical and Computer Engineering University
of Rochester Rochester, NY.
[3] Bors A. G., and Pitas I. (1998). Image watermarking using block site selection and DCT
domain constraints. Department of Informatics University of Thessaloniki Thessaloniki,
Greece.
[4] Bultheel A. (2007). Digital watermarking of images in the fractional Fourier domain.
Katholieke Universiteit Leuven. Report TW497.
[5] Condon E.U. (1937). Immersion of the Fourier transform in a continuous group of
functional transformations. Proc. National Academy Sciences.
[6] Cox I. J., Miller M. L., and Bloom J. A. (2000). Watermarking applications and their
properties. NEC Research Institute 4 Independence Way Princeton, NJ 08540.
92
[7] Cox I.J., and Miller M. L. (2004). Facilitating watermark insertion by preprocessing
media. NEC Research Institute 4 Independence Way Princeton NJ 08540.
[8] Djurovic I., Stankovic S., and Pitas I. (2001). Digital watermarking in the fractional
Fourier transform domain. J. of Network and Computer Applications.
[9] Elbasi E., and Eskicioglu A. M. A Semi-Blind Watermarking Scheme for Images Using
a Tree Structure. Department of CIS, Brooklyn College, CUNY 2900 Bedford Avenue,
Brooklyn, NY, USA.
[10] Hembrooke E. F. (1961). Identication of sound and like signals. United States Patent.
[11] Kober H. (1939). Fourier und aus anderen stetigen transfornationen. Q. J. Math. Oxford.
[12] Lia L., Pana Z., Zhanga M., and Yea K. (2004). Watermarking Subdivision Surfaces
Based on Addition Property of Fourier Transform. Association for Computing Machinery, Inc.
[13] Lighthill M.J. (1958). An introduction to Fourier analysis and generalized functions.
Cambridge University Press.
[14] McBride A.C. and Kerr F.H. (1987). On Namias’s fractional Fourier transforms. IMA
J. Appl. Math.
[15] Namias V. (1980). The fractional order Fourier transform and its applications to quantum mechanics. J. Inst. Math Appl.
[16] Ozaktas H.M., Zalevsky Z., and Kutay M.A. (2001). The fractional Fourier transform.
Wiley, Chichester.
93
[17] Pei S.C., Yeh M.H. (2001). The discrete fractional cosine and sine transforms. IEEE
Trans. Sig. Proc.
[18] Sneddon I.N. (1995). Fourier Transform. Dover Publications, Inc., New York.
[19] Stein E. M. and Shakarchi R. (2002). Fourier Anaysis: an introduction. Pricenton Lectures in Analysis.
[20] Strichartz R. S. (2004). A guide to Distribution Theory and Fourier transforms. World
Scientific Publishing Co.
[21] Wiener N. (1929). Hermitian polynomials and Fourier analysis. J. Math. Phys.
[22] Wolfgang R., and Delp E. (1996). A watermark for digital images, Proceedings International Conference on Images Processing. pp. 219-222, Lausanne, Switzerland.
[23] Zemanian A.H. (1965). Distribution theory and transform analysis. Dover Publications,
Inc., New York.
94