SISTEMAS DE SEGUNDO ORDEN - TIPO 1
R(s)
C(s)
K
s (s + p )
Función de Transferencia a Lazo Cerrado (FTLC):
C ( s)
R ( s)
1
C( s )
K
K
=
=
=
R( s ) s(s + p ) + K s 2 + ps + K ( s + s1 )( s + s2 )
Para el estudio de un sistema de segundo orden se analiza la FTLC general de
la forma:
C (s)
Kω 2
=
R( s ) s 2 + 2ξω n s + ω 2 n
donde:
ωn es la frecuencia natural
ξ es el coeficiente de amortiguación
Para K=1
ωn
C (s )
= 2
2
R(s ) s + 2ξω n s + ω n
2
La factorización del denominador de esta función dará los dos polos del
sistema: s1, 2 = −ξω n ± ω n
ξ 2 −1
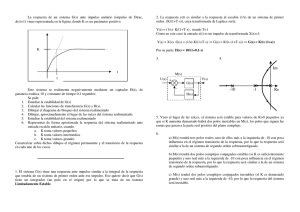
COMPORTAMIENTO DE LOS SISTEMAS DE 2DO ORDEN
DEPENDIENDO DE ξ
jw
x
c(t)
ωn
σ
0<ξ<1
Sistema Subamortiguado
Polos complejos conjugados.
S1,2 = -ξωn ± jωd
x
jw
x ωn
c(t)
σ
x -ωn
jw
c(t)
x
σ
ωn
jw
c(t)
x
x
-ξωn
- ωd
-ξωn
+ ωd
σ
jw
x
c(t)
σ
ξωn ±
x
ξ=0
Sistema en el punto de
estabilidad crítica
Polos imaginarios
S1,2 = ± jωn
ξ=1
Sistema críticamente
amortiguado
Polos reales e iguales
S1,2 = - ωn
ξ>1
Sistema sobreamortiguado
Polos reales y diferentes
S1,2 = - ξωn ± ωd
ξ<0
Sistema inestable
Polos en el semiplano derecho
S1,2 = ξωn ± ωd
SISTEMA DE SEGUNDO SUBAMORTIGUADO: 0 < ξ < 1
ωn
C (s )
= 2
2
R(s ) s + 2ξω n s + ω n
2
Polos complejos conjugados:
s1 = − ξω n + jω d
s2 = − ξω n − jω d
con ω d = ω n ⋅ 1 − ξ 2 .
RESPUESTA AL ESCALÓN: R ( s) =
A
s
C (s )
ωn
=
R(s ) (s + ξω n − jω d )(s + ξω n + jω d )
2
Sustituyendo y aplicando fracciones parciales:
Aω n
Aω n
C (s ) =
=
s (s 2 + 2ξω n s + ω 2 n ) s (s + ξω n − jω d )(s + ξω n + jω d )
2
2
C ( s) =
A3
A1
A2
+
+
s (s + ξωn − jω d ) (s + 2ω n + jω d )
Antitransformando
c(t ) = A1 + A2 e (− ξω
⎛
A
⎜
c( t ) = A − ⎜
⎜ 1−ξ 2
⎝
⎛ 1−ξ 2
⎜
donde: θ = arctg ⎜
⎜ ξ
⎝
n
+ ω d j )t
+ A3e (− ξω
n
− ω d j )t
⎞
⎟ −ξω t
sen(ω d t + θ )
⎟⎟e
⎠
n
t ≥0
⎞
⎟
⎟⎟
⎠
Envolvente
e−ξω t
1−ξ 2
n
AA
Sinusoide
sen(ωdt + e)
ωd = ωn 1−ξ 2
SISTEMA DE SEGUNDO CRÍTICAMENTE ESTABLE: ξ = 0
ω
C( s )
= 2 n 2
R( s ) s + ω n
2
polos imaginarios puros:
s1 = jω n ,
RESPUESTA AL ESCALON: R ( s) =
s 2 = − jω n
A
s
Sustituyendo y aplicando fracciones parciales:
Aω n
C( s ) =
2
s( s 2 + ω n )
2
=
A
As
− 2
2
s s + ωn
Antitransformando:
c( t ) = A[ 1 − cos( ω n )t ]
A
SISTEMA DE SEGUNDO CRITICAMENTE AMORTIGUADO: ξ = 1
ω 2n
ω 2n
C ( s)
=
=
R( s) s 2 + 2ω n s + ω n2 ( s + ω n ) 2
polos reales iguales: s1 = s2 = −ωn
RESPUESTA AL ESCALÓN: R ( s) =
A
s
Sustituyendo y aplicando fracciones parciales:
C( s ) =
=
Aω n2
s( s + ω n ) 2
Aω n
A
A
−
−
s ( s + ω n )2 s + ω n
Antitransformando:
(
= [1 − e
)
c(t ) = 1 − e − ω n t − ω n te − ω n t A
−ω n t
]
(1 + ω n t ) A
A
Este sistema es el que crece más rápido sin exceder el valor final. Visto de
otro modo, c(t) es la más rápida entre las c(t) estrictamente crecientes.
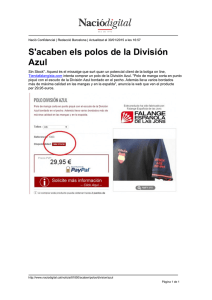
SISTEMA SOBREAMORTIGUADO : ξ > 1
ωn
C (s )
= 2
2
R(s ) s + 2ξω n s + ω n
2
Polos reales y distintos:
con ω d = ω n ξ 2 − 1
s1 = −ξω n − ω d , s2 = −ξω n + ω d ,
Im(s)
s2
s1
Re(s)
RESPUESTA AL ESCALON: R( s) =
A
s
Sustituyendo y aplicando fracciones parciales:
C( s ) =
(
Aω n 2
s s 2 + 2ξω n s + ω 2 n
A Aω 2 n
= +
s
2ω d
)
=
s ⎤
A
A ⎡ s2
+
− 1 ⎥=
⎢
s 2ω d ⎣ s + s1 s + s2 ⎦
⎡ 1 ⎛ 1 ⎞ 1 ⎛ 1 ⎞⎤
⎟⎟⎥
⎟⎟ − ⎜⎜
⎢ ⎜⎜
s
s
s
s
s
s
+
+
⎠⎦
⎝
⎠
⎝
1
1
2
2
⎣
Antitransformando:
Aω n ⎛ e − s t e − s t ⎞
⎜⎜
⎟⎟
c(t ) = A +
−
2
s
s
2 ξ −1 ⎝ 1
2 ⎠
1
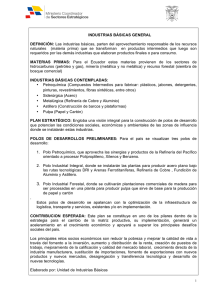
2
c(t)
e(∞)=0
A
t
Si s1 >> s 2 podemos aproximar:
c(t ) = (1 − e − s t ) A = [1 − e ( −ξω
2
n
+ω d )t
]A
Observe que la aproximación equivale a un sistema de primer orden
RESPUESTA PARA TODOS LOS VALORES DE ξ
 0
0