- Ninguna Categoria
t - prof.usb.ve.
Anuncio
Volumen I
4-1
Capítulo IV
4.1 INTRODUCCIÓN
El primer paso del análisis de un sistema de control, es deducir un modelo
matemático del sistema. Una vez obtenido, se dispone de varios métodos para analizar el
comportamiento del sistema a través del análisis de la respuesta de las ecuaciones que
representan el modelo matemático.
Ya que el tiempo es una variable importante en la mayoría de los sistemas de
control, es usualmente de interés evaluar la respuesta en el tiempo o respuesta transitoria.
En el problema del análisis, una señal de entrada de referencia se aplica al sistema, y el
desempeño del sistema se evalúa al estudiar la respuesta del sistema en el dominio del
tiempo.
Al analizar y diseñar sistemas de control, se debe disponer de una base para
comparar el comportamiento de diversos sistemas de control.
Esa base se puede
establecer especificando determinadas señales especiales de entrada y comparando las
respuestas de diversos sistemas ante esas señales. La respuesta transitoria de un sistema
ante cualquier entrada, se puede obtener mediante una simulación en computadora.
La respuesta en el tiempo de un sistema de control se divide normalmente en dos
partes: la respuesta transitoria y la respuesta estacionaria. Sea y(t) la respuesta en el
tiempo de un sistema en tiempo continuo; entonces, en general, se tiene:
y(t) = yt(t) + yss(t)
(4-1)
donde yt(t) indica la respuesta transitoria (solución homogénea) y yss(t) la respuesta en
estado estacionario (solución particular), esto se muestra en la figura siguiente
La respuesta transitoria está definida como la parte de la respuesta en el tiempo
que tiende a cero cuando el tiempo se hace muy grande:
lim y t ( t ) = 0
t →∞
(4-2)
Volumen I
4-2
Figura 4.1: Respuesta transitoria y en estado estacionario
La respuesta transitoria de un sistema de control es necesariamente importante,
ya que es una parte significativa del comportamiento dinámico del sistema; y la
desviación entre la respuesta de la salida y la entrada o respuesta deseada se debe
controlar cuidadosamente antes de alcanzar el estado estable.
La respuesta estacionaria es la parte de la respuesta total que permanece después
que la transitoria ha desaparecido. Esta respuesta es también muy importante, ya que
indica en donde queda la salida del sistema cuando el tiempo se hace grande.
Todos los sistemas de control estables reales presentan un fenómeno transitorio antes de
alcanzar la respuesta en estado estable.
4.2 SEÑALES DE PRUEBA TÍPICAS (ENTRADAS) PARA
OBTENER LA RESPUESTA EN EL TIEMPO DE SISTEMAS DE
CONTROL
Para propósitos de análisis y diseño, es necesario suponer alguno tipos básicos de
entradas de prueba para evaluar el desempeño de un sistema. Mediante la selección
adecuada de estas señales de prueba básicas, no sólo se sistematiza el tratamiento
matemático del problema, sino que la respuesta a este tipo de entradas permite la
predicción del desempeño del sistema con otras entradas más complejas.
Volumen I
4-3
La selección de las señales de entrada a utilizar para analizar las características de
un sistema depende de la forma de las de las señales de entrada más habituales a que el
sistema estará sometido en condiciones normales de operación. Todos los sistemas que
tienen la misma función de transferencia, tienen la misma salida como respuesta a la
misma entrada.
Las señales de prueba más utilizadas son las que se muestran a continuación:
•
Función escalón
Representa un cambio instantáneo en la entrada de referencia. La representación
matemática de una función escalón de magnitud A es:
r(t) = A t > 0
0 t<0
en donde A es una constante real. O bien
r(t) = A u(t)
en donde u(t) es la función escalón unitario.
La función escalón es muy útil como señal de prueba, ya que su brinco
instantáneo inicial de amplitud revela que tan rápido responde un sistema a entradas con
cambios abruptos.
La transformada de Laplace de esta función es:
R( s) =
A
s
(4-3)
r(t)
r(t)=R·u(t)
R
0
(a)
Figura 4.2 : Señal básica de prueba en el dominio del tiempo para sistema de control
(función escalón).
Volumen I
•
4-4
Función rampa
Es una señal que cambia constantemente con el tiempo. Matemáticamente, una
función rampa se representa mediante:
r(t) = b t u(t)
(4-4)
en donde b es una constante real.
La función rampa tiene la habilidad de probar cómo responde el sistema a señales
que cambian linealmente con el tiempo.
La transformada de Laplace de esta función es:
R (s) =
b
(4-5)
s2
r(t)
Pendiente =
r(t)=R·t·u(t)
0
(b)
Figura 4.3: Señal básica de prueba en el dominio del tiempo para sistemas de
control. (función rampa)
•
Función impulso
Representa un cambio instantáneo en la entrada de referencia, de magnitud
infinita que dura sólo un instante de tiempo, para luego volver a su condición original. La
representación matemática de una función impulso de magnitud A es:
0 t<0
r(t´) = A t = t0
0 t>0
en donde A es una constante real, o bien:
r(t) = A δ(t)
en donde δ(t) es la función pulso, también conocida como Delta de Dirac.
La transformada de Laplace de esta función es:
Volumen I
4-5
R(s) = A
(4-6)
r(t)
r(t)=R·δ(t)
0
(c)
Figura 4.4: Señal básica de prueba en el dominio del tiempo para sistemas de
control. (función impulso)
•
Función parabólica
Representa una señal que tiene un orden más rápido que la función rampa.
Matemáticamente, se representa como:
r (t ) =
R t2
u(t )
2
(4-7)
en donde R es una constante real.
De la función escalón a la función parabólica, las señales se vuelven
progresivamente más rápidas con respecto al tiempo.
r(t)
r(t)=R·t2 ·u(t)
0
(d)
Figura 4.5: Señal básica de prueba en el dominio del tiempo para sistemas del
control.(función parabólica)
Volumen I
4.3
4-6
ANÁLISIS DE LA RESPUESTA TRANSITORIA EN LOS
DISTINTOS TIPOS DE SISTEMAS
4.3.1 Sistemas de Primer orden
•
Sistemas de primer orden (tipo 0)
Los sistemas de primer orden de tipo cero son aquellos que no poseen polos en el
origen, y presentan la siguiente configuración:
Figura 4.6: Configuración de un sistema de primer orden de tipo 0
La función de Transferencia a Lazo Cerrado (FTLC) =
C(s)
para un sistema de
R (s)
tipo 0 viene dada por:
K1
T s +1
K1
C ( s)
= 1
=
K1
T1 s + (1 + K1 )
R( s)
1+
T1 s + 1
Tomando K =
(4-8)
K1
T1
y T=
1 + K1
1 + K1
Podemos representar nuestro sistema como:
C ( s)
K
=
R ( s) Ts + 1
(4-9)
Volumen I
4-7
Donde: K = Ganancia del sistema.
T = Constante de tiempo del sistema.
A
s
Respuesta al escalón: R ( s) =
Sustituyendo: C ( s) =
KA
s(Ts + 1)
Aplicando fracciones parciales:
K ⎞
KA
⎛K
KA
T ⎟⋅A
T
T
⎜
=
=
−
C ( s) =
⎜
s
s(Ts + 1) s s + 1
s + 1T ⎟⎠
T ⎝
(
)
Por lo tanto:
(
Respuesta en el tiempo: c( t ) = KA 1 − e
(
Para: t = T ; c( t ) = KA 1 − e
−1
−t /T
)
) = 0.632KA
Figura 4.7: Respuesta al escalón de un sistema de 1er orden (tipo 0)
Volumen I
4-8
En conclusión:
Respuesta al escalón de un sistema de primer orden (Tipo 0)
- Estado estacionario:
El error en estado estacionario para un sistema de primer orden de tipo cero es:
e(t ) = r (t ) − c(t ) ⇒
⎛
K A ⎞
A
ess = e(∞ ) = A − C (∞ ) = ⎜⎜ A − 1 ⎟⎟ =
1 + K1 ⎠ 1 + K1
⎝
(4-10)
- Respuesta Transitoria:
La respuesta transitoria queda definida por la constante de tiempo T. Está
caracterizada por el tiempo de establecimiento ts, en el cual la respuesta alcanza los
siguientes valores:
ts = 3 T ⇒ c(3T) = 0.95c(∞) ⇒ ess ≤ 5%
ts = 4 T ⇒ c(4T) = 0.98c(∞) ⇒ ess ≤ 2%
•
Sistemas de primer orden (Tipo 1)
Los sistemas de primer orden de tipo cero son aquellos que no poseen polos en el
origen, y presentan la siguiente configuración:
Figura 4.8: Configuración de un sistema de primer orden de tipo 1
Función de Transferencia a Lazo Cerrado (FTLAC):
C ( s)
R ( s)
Volumen I
4-9
K1
Ts
K1
C ( s)
= 1 =
K
T1 s + K1
R( s)
1+ 1
T1 s
(4-10)
Podemos reescribir el sistema como:
T
Donde T = 1 , y
1
C ( s)
=
R( s ) Ts + 1
Respuesta al escalón: R ( s) =
K1
K=1
(4-11)
A
s
Sustituyendo y aplicando fracciones parciales:
C ( s) =
A
A
A
= −
s( s + 1 T ) s s + 1 T
(
Respuesta en el tiempo: c( t ) = A 1 − e
Para t = T :
(
−t / T
)
)
c(t ) = A 1 − e −1 = 0.632 A
Figura 4.9: Respuesta al escalón de un sistema de primer orden (Tipo 1)
Volumen I
4-10
Nótese que en este caso:
El error es:
e(t ) = r (t ) − c(t ) ⇒
Error en estado estacionario: ess = e(∞) = A − c(∞ ) = A − A = 0
A
s
Respuesta a la rampa: R ( s) = 2
Sustituyendo y aplicando fracciones parciales:
C ( s) =
⎛ 1 T
A
T ⎞
= A⎜ 2 − +
⎟
s s +1 T⎠
⎝s
s ( Ts + 1)
Antitransformando se obtiene:
2
(
c( t ) = A t − T + T ⋅ e − t / T
)
Respuesta en el tiempo:
Figura 4.10: Respuesta a la rampa de un sistema de 1er orden (tipo1)
La rapidez de la respuesta transitoria viene dada siempre por T.
Para el error en estado estacionario se tiene en cambio:
Error: e(t ) = r (t ) − c(t ) ⇒
Error en estado estacionario: ess = e( ∞) = At − c( ∞) = AT
Volumen I
4.3.2
•
4-11
Sistemas de Segundo Orden
Sistemas de Segundo Orden (Tipo 1)
La configuración para un sistema de segundo orden se muestra a continuación:
+
K
s (s + p )
-
Figura 4.11: Configuración de un sistema de segundo orden (tipo 1)
La función de Transferencia a Lazo Cerrado (FTLC) =
K1
K1
1
C ( s)
=
= 2
=
1 2 p
R( s ) s(s + p ) + K 1 s + ps + K 1
s + s +1
K
K
C ( s)
es:
R ( s)
(4-12)
Para el estudio de un sistema de segundo orden se analiza la FTLC de la forma:
C ( s)
Kω 2
= 2
R( s ) s + 2ξω n s + ω 2 n
(4-13)
donde: ωn es la frecuencia natural.
ξ es el coeficiente de anortiguamiento.
Nota: Ya que el sistema analizado ahora es de tipo 1, la función de transferencia a
estudiar tiene K=1 y luego es de la forma:
C(s )
ωn 2
=
R (s ) s 2 + 2ξωn s + ωn 2
(4-14)
La factorización del denominador de esta función dará los dos polos del sistema,a
saber:
s1, 2 = −ξω n ± ω n ξ 2 − 1
(4-15)
Volumen I
4-12
Dependiendo de los valores de la constante ξ se pueden subclasificar los sistemas de
segundo orden de la siguiente manera:
- Sistemas de segundo orden sobreamortiguado :ξ>1
En el caso general en que ξ>1, se tiene que la FTLC tiene dos polos reales y distintos:
s1 = −ξω n − ω d , s 2 = −ξω n + ω d ,
con
ωd = ωn ξ 2 −1
(4-16)
donde la constante ωd se denomina como la frecuencia amortiguada.
Diagrama de polos y ceros:
Im(s)
Re(s)
s1
s2
Figura 4.12: Diagrama de polos y ceros de un sistema de segundo orden
sobreamortiguado
Respuesta al escalon: R ( s) =
A
s
Sustituyendo y aplicando fracciones parciales:
C ( s) =
2
Aω n
s ⎤
A
A ⎡ s2
= +
− 1 ⎥=
⎢
2
2
s 2ω d ⎣ s + s1 s + s 2 ⎦
s s + 2ξω n s + ω n
(
)
Volumen I
4-13
=
A Aω 2 n
+
2ω d
s
⎡1 ⎛ 1 ⎞ 1 ⎛ 1
⎟⎟ − ⎜⎜
⎢ ⎜⎜
s
s
s
+
1
1
⎠ s2 ⎝ s + s2
⎝
⎣
⎞⎤
⎟⎟⎥
⎠⎦
Antitransformando se obtiene la respuesta en el tiempo:
Respuesta en el tiempo:
c(t ) = A +
Aω n
⎛ e − s1t e − s2t
⎜⎜
−
s2
2 ξ 2 − 1 ⎝ s1
⎞
⎟⎟
⎠
c(t)
e(∞)=0
A
t
Figura 4.13: Respuesta al escalón de un sistema de segundo orden
sobreamortiguado.
Si s1 >> s 2 podemos aproximar:
(
) [
]
c(t ) = 1 − e −s2t A = 1 − e (−ξω n +ωd )t A
Observe que la aproximación equivale a un sistema de primer orden tipo 1.
A medida que ξ se aproxima a 1, los polos se van acercando entre sí, y viceversa,
a medida que ξ>>1, el sistema se aproxima mejor a uno de 1er orden (con la constante de
tiempo asociada al polo más pequeño en magnitud).
- Sistema de segundo orden subamortiguado: 0 < ξ < 1
La FTLC tiene dos polos complejos conjugados si 0<ξ<1 ⇒
s1 = −ξω n + jω d
s2 = −ξω n − jω d
con
ωd = ωn ⋅ 1 − ξ 2
Observe que siempre se cumple que ω d < ω n .
(4-17)
Volumen I
4-14
Diagrama de polos y ceros:
Figura 4.14:Diagrama de polos y ceros de un sistema de segundo orden
subamortiguado
Note que los polos poseen partes reales iguales y son simétricos respecto al eje
real.
Respuesta al escalón: R ( s) =
A
s
ωn
C (s )
=
R(s ) (s + ξω n − jω d )(s + ξω n + jω d )
2
La función de transferencia es:
Sustituyendo y aplicando fracciones parciales:
Aωn 2
C(s ) =
=
s(s + ξωn − jωd )(s + ξωn + jωd )
s s 2 + 2ξωn s + ω2 n
(
C ( s) =
Aωn 2
)
A3
A1
A2
+
+
s (s + ξω n − jω d ) (s + 2ω n + jω d )
Volumen I
4-15
c(t ) = A1 + A2 e (−ξω n +ω d j )t + A3 e (−ξω n −ω d j )t
Efectuando la antitransformada se obtiene:
Respuesta en el tiempo:
⎛ A
c(t ) = A − ⎜
⎜ 1−ξ 2
⎝
⎞ −ξω t
⎟e n sen (ω t + θ )
d
⎟
⎠
⎛ 1−ξ 2
donde: θ = arctg⎜
⎜ ξ
⎝
t≥0
⎞
⎟
⎟
⎠
Envolvente:
e−ξω t
1−ξ 2
n
A
Sinusoide
sen(ωdt + e)
ωd = ωn 1−ξ 2
Figura 4.15: Respuesta al escalón de un sistema de segundo orden subamortiguado
- Sistema de segundo orden críticamente amortiguado: ξ = 1
Si ξ=1 se tiene que la FTLC es de la forma:
ω n2
ω n2
C (s)
= 2
=
R( s ) s + 2ω n s + ω n2 ( s + ω n ) 2
y tiene dos polos reales iguales: s1 = s2 = −ξω n
(4-18)
Volumen I
4-16
Diagrama de polos y ceros:
Figura 4.16: Diagrama de polos de un sistema de segundo orden críticamente
amortiguado
Respuesta al escalón: R ( s) =
A
s
Sustituyendo y aplicando fracciones parciales:
C(s) =
=
Aω2n
s(s + ωn ) 2
A
Aωn
A
−
−
2
s (s + ωn )
s + ωn
Respuesta en el tiempo:
Aplicando la antitransformada de Laplace se obtiene:
(
)
c(t ) = 1 − e −ω nt − ω n te −ω nt A
[
]
= 1 − e −ω nt (1 + ω n t ) A
Volumen I
4-17
Figura 4.17: Respuesta al escalón de un sistema de segundo orden
críticamente amortiguado
Este sistema es el que crece más rápido sin exceder el valor final. Visto de otro
modo, c(t) es la más rápida entre las c(t) estrictamente crecientes.
4.3.3
Sistemas de orden superior
A continuación se muestra el siguiente esquema de un sistema retroalimentado:
Volumen I
4-18
R(s)
C(s)
G(s)
+ _
H(s)
Figura 4.18: Diagrama de bloques para un sistema retroalimentado
La FTLC es de la forma:
C(s )
G (s )
=
R (s ) 1 + G (s )H(s )
(4-19)
donde G(s) y H(s) pueden ser representados por una relación de polinomios, quedando de
la siguiente forma:
C( s) k ( s + z1 )( s + z2 )... ( s + zm )
=
R( s) ( s + p1 )( s + p2 )... ( s + pm )
(4-20)
Caso A: Todos los polos de la función son reales y diferentes
Entonces:
C (s ) =
A n ai
+∑
;
s i =1 s + pi
donde ai es el residuo del polo i.
(4-21)
(con entrada escalón de magnitud A)
• Si todos los pi están a la izquierda del plano s, se hace la determinación de los residuos
ai. Un par de polos y ceros que se encuentren cercanos cancelan sus efectos.
• Si un polo está muy lejano al origen, su efecto en la transiente es casi nulo, porque la
exponencial respectiva decae muy rápidamente.
Volumen I
4-19
• Cuando los ai son muy pequeños, se pueden despreciar estos términos y se pueden
aproximar los sistemas a órdenes inferiores.
Caso B: La función tiene polos reales y/o complejos conjugados:
m
C (s ) =
k ∏ (s + z i )
i =1
r
(
s∏ (s + p j )∏ s + 2ξω k s + ω
q
j =1
2
2
k
(4-22)
)
k =1
Si los polos reales son distintos, la respuesta del sistema viene dada por:
c(t ) = { A } + {
q
∑ a je
j =1
− p jt
} + { ∑ bk e −ξ ω t sen (ω k
r
k
k
k =1
↓
↓
↓
A
B
C
1 − ξ k2t + φ
)}
(4-23)
donde q + 2r = n : orden del sistema.
Se puede observar que c( t ) envuelve los siguientes términos:
{A} Estado estacionario: Depende de la entrada y del número de la función de
transferencia, en este caso ctte (porque se supuso un escalón de magnitud A)
⎫
{B} : 1er orden ⎬
⎭
⎫
{C} : 2 orden ⎬
⎭
Respuesta Transitoria.
do
•
Los ceros de la FTLC solo afectan a las magnitudes de los residuos de la respuesta,
(coef,aj y bk)
•
Polos dominantes: Se puede aproximar la respuesta a la del sistema de 1er orden o de
2do orden con el (o los) polos dominantes( de magnitud más pequeña).( Si la relación
entre las partes reales de los polos es mayor que 5 y no existen ceros cerca, entonces
los polos dominantes son los que estan más cerca del eje jω ).
Volumen I
4.4
4-20
ANÁLISIS PARAMÉTRICO
El análisis se basa en dos aspectos:
•
Rapidez de la respuesta
•
Estabilidad Relativa
Se considera para este análisis la respuesta subamortiguada, ya que la sobre-
amortiguada, se puede estudiar como de 1er orden
1.5
Mp
1
0.9
0.5
0.1
0
tr
tc
tp 1
2
3
4
Figura 4.19: Respuesta del sistema subamortiguado
Rapidez
Tiempo de Retardo: (tr )
Es el tiempo necesario para alcanzar por primera vez el 50% de c( ∞ ) .
Volumen I
4-21
tr =
(1 + 0.6ξ + 0.15ξ 2 )
(4-24)
ωn
Tiempo de Crecimiento: (tc )
Es el tiempo necesario para ir desde el 10% hasta el 90 % de c( ∞ ) .
t c = t 90% − t10% =
1 + 11
. ξ + 14
. ξ2
ωn
(4-25)
( )
Tiempo de Pico: t p
Es el tiempo que tarda la respuesta en alcanzar su primer máximo.
tp =
π
ωn 1 − ξ
2
=
π
ωd
(4-26)
Tiempo de Establecimiento: ( t s )
•
Criterio de 5%: Tiempo que tarda la respuesta en mantenerse dentro de 5% de c( ∞ ) .
ts =
•
3
ξω
(4-27)
Criterio de 2%: Tiempo que tarda la respuesta en mantenerse dentro de 2% de c( ∞ ) .
ts =
4
ξω
(4-28)
Estabilidad Relativa
( )
(
)
Máximo pico M p y Máximo pico porcentual M p % .
Se define como máximo pico, a la diferencia de valores de la salida c(t) entre su
primer valor máximo, y su valor en estado estacionario c( ∞ ) , (es decir, es el valor
relativo del primer máximo respecto al valor final).
( )
c(t p ) − c( ∞)
⎛
%=
× 100 = e − πξ /
M p = c t p − c( ∞)
Mp
c( ∞)
⎜
⎝
1− ξ 2
⎞
⎟ × 100
⎠
(4-29)
Volumen I
4-22
DISCUSIÓN:
•
La velocidad de caída del transitorio depende de τ =
1
ξω n
. Para un valor dado de ω n ,
si ξ aumenta (ξ → 1) , t s disminuye. (En los sistemas sobreamortiguados, t s puede ser
mayor ya que se tarda la inicialización de la respuesta).
•
El valor de Mp depende solo de ξ .
Figura 4.20: Evolución del máximo pico (Mp) con ξ
En general, ξ esta fijada por un requerimiento de Mp , por lo tanto, para mejorar
t s habrá que aumentar ω n .
CONCLUSIONES:
Las características de la respuesta transitoria para los sistemas de 2do orden
subamortiguado depende de los parámetros ξ y ω n ; es decir de la ubicación de los polos
de lazo cerrado: s1,2 = − ξω n ± jω d
Volumen I
4-23
ω n 2 = ω d 2 + (ξω n )2 = ω n 2 (1 − ξ 2 ) + ω n 2ξ 2
ξω n
cos(θ ) =
= ξ ⇒ θ = arcos(ξ )
ωn
(4-30)
La siguiente figura muestra la ubicación en el plano s de las raíces cuando cada
uno de los parámetros ωn,, ξ,, α, y ω son constantes.
Jw
Amortiguamiento jw
positivo
ws1>ws2>ws3
Amortiguamiento
ζ4
negativo
Plano s
ζ3
ζ=0
plano s
ws2
ws1
s
0
ws3
ζ2
ζ=0
ζ1
Amortiguamiento
(a)
Amortiguamiento
Amortiguamiento
Positivo
Jw
Positivo
s
0
Amortiguamiento
Negativo
(b)
negativo
jw
plano s
w2
w1
-σ3
-σ2
0
σ1
Amortiguamiento
Positivo
s
Amortiguamiento
(c)
Negativo
0
-w1
-w2
(d)
Figura 4.22: Ubicación de las raíces para: (a) ωn constante, (b) ξ constante, (c) α
constante, (d) ω constante
4.5
EJEMPLOS
Volumen I
4-24
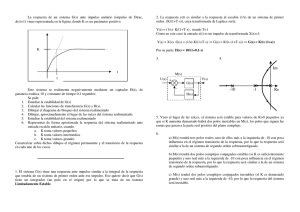
4.5.1 Problema N° 1
Para el sistema mostrado:
(Ks + 1)
(s + 1)(s + 2)
5s
Figura 4.23
Estudie el comportamiento del sistema los distintos valores de K.
Solución:
La función de lazo cerrado de éste sistema es:
C (s )
G (s )
Ks + 1
Ks + 1
= T (s )
=
=
= 2
R(s ) 1 + G (s )H (s ) (s + 1)(s + 2) + (Ks + 1)5s s + 3s + 2 + 5 Ks 2 + 5s
Ks + 1
T (s ) =
(1 + 5K )s 2 + 8s + 2
Los sistemas de 2do orden como el propuesto, pueden ser de tres tipos:
•
•
•
Sistemas Sobreamortiguados (ξ>1)
Sistema Críticamente Amortiguados (ξ=1)
Sistemas Subamortiguados (0<ξ<1)
Sabemos que la ecuación característica es:
(1 + 5K )s 2 + 8s + 2 = 0 ⇒ s 2 +
8s
2
+
=0
(1 + 5K ) (1 + 5K )
la cual puede ser expresada como: s 2 + 2ξWns + Wn 2 = 0
Por lo que dependiendo del valor de K obtendremos distintos valores de ξ y de Wn, ya
que:
Volumen I
4-25
8
= 2Wnξ
(1 + 5K )
•
Caso ξ=1
⇒
2
= Wn 2
(1 + 5K )
(1)
(2)
2
= Wn 2
(1 + 5K )
8
= 2Wn
(1 + 5K )
Con lo cual tenemos un sistema de dos ecuaciones con dos incógnitas Wn y K,
resolviéndolo:
4
2
16
= Wn ⇒
=
⇒ 2 ⋅ (1 + 5 K ) = 16 ⇒ (1 + 5 K ) = 8
(1 + 5K )
(1 + 5K ) (1 + 5K )2
Finalmente: K=7/5=1.4 para ξ=1.
¿ Qué pasa cuando aumentamos o disminuimos el valor de K?
Trabajando las ecuaciones (1) y (2) obtenemos una expresión para ξ en función de K:
ξ=
4
2(1 + K )
Por lo tanto:
K>1.4
0<K<1.4
ξ Disminuye (0<ξ<1)
ξ Aumenta (ξ>1)
Sistemas Subamortiguados
Sistemas Sobreamortiguados
4.5.2 Problema N° 2
Dado el sistema cuyo diagrama se muestra en la figura
R(s)
Ka
s (τs + 1)
Figura 4-24
C(s)
Volumen I
4-26
a) Mediante que factor debe alterarse la ganancia del amplificador Ka para que el
sistema pase de un coeficiente de amortiguamiento de ξ=0.2 hasta ξ=0.6
b) Mediante que factor debe alterarse la ganancia del amplificador Ka para que el
sobreimpulso que originalmente es de 80% se reduzca a un 20%
Solución:
a) La función de transferencia de lazo cerrado del sistema es:
Ka
Ka
Ka
Ka
C (s )
τ
=
=
=
=
2
2
K
1
R(s ) s (τ ⋅ s + 1) + K a τ ⋅ s 2 + s + K a
s 2 + s + a s + 2ξ ⋅ Wn + Wn
τ
τ
Por lo que igualando a los últimos miembros de la expresión anterior:
Parte (a)
1
2 .5
6.25
= 0.4 ⋅ Wn ⇒ Wn ⋅ τ = 2.5 ⇒ Wn =
⇒ Wn 2 = 2
τ
τ
τ
Ka
6.25 Ka1
6.25
= Wn 2 ⇒ 2 =
⇒ Ka1 =
τ
τ
τ
τ
1
0.833
0.6944
= 1.2 ⋅ Wn ⇒ Wn ⋅ τ = 0.833 ⇒ Wn =
⇒ Wn 2 =
τ
τ
τ2
Ka
0.6944 Ka 2
0.6944
= Wn 2 ⇒
=
⇒ Ka 2 =
2
τ
τ
τ
τ
Dividiendo (1) entre (2):
Por lo que finalmente:
Ka 2 =
1
Ka1
9
Parte (b)
Ka1
6.25
=
=9
Ka 2 0.6944
(1)
(2)
Volumen I
4-27
− πξ
Mp = e
1−ξ 2
Ln ⋅ Mp =
− π⋅ξ
1 − ξ2
Mp=0.8 ⇒ ξ=0.071
1
7.042
49.59
= 0.142 ⋅ Wn ⇒ Wn ⋅ τ = 7.042 ⇒ Wn =
⇒ Wn 2 = 2
τ
τ
τ
Ka
49.59 Ka3
49.59
= Wn 2 ⇒ 2 =
⇒ Ka3 =
τ
τ
τ
τ
(3)
Mp=0.2 ⇒ ξ=0.456
1
1.0965
1.202
= 0.912 ⋅ Wn ⇒ Wn ⋅ τ = 1.0965 ⇒ Wn =
⇒ Wn 2 = 2
τ
τ
τ
(4)
Ka
1.202 Ka 4
1.202
2
= Wn ⇒ 2 =
⇒ Ka 4 =
τ
τ
τ
τ
Dividiendo (4) entre (3):
Ka 4 1.202
=
= 0.0242
Ka3 49.59
Por lo que finalmente: Ka 4 = 0.0242 Ka3
 0
0
Anuncio
Documentos relacionados






Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados