TEORÍA DE SISTEMAS
Curso 00/01, 1ª convocatoria (03/02/01)
En el diseño de un útil de apriete preciso hasta el par especificado, se ha decidido emplear
un motor eléctrico con control realimentado de par. Físicamente, el útil consta del motor
(constantes Ke y Kp, resistencia de inducido R, inercia del rotor Jm, y fricción en el rotor fm),
y un eje para transmitir el par, acoplado al motor mediante un reductor de relación n. La
Figura 1 esquematiza este útil.
Vp
≈0
a
Ve
Motor-reductor
P
Sección
elástica
Figura 1: esquema físico de un útil de apriete
El eje de transmisión tiene una sección elástica a la torsión que puede modelarse como un
resorte de constante Ket, y el par aplicado es por tanto proporcional a la torsión de esta
sección: P=Ket*a (dado que el útil se aplica a tornillos preapretados, puede suponerse que
el extremo del eje de transmisión acoplado al tornillo no gira, y por tanto la torsión es igual al
ángulo girado por el rotor, a). La medida del par, que se necesita para el control
realimentado, se hace mediante un sensor (galga extensiométrica) sobre esta misma
sección elástica, que da un voltaje proporcional al ángulo de torsión: Vp=Ks*a. Utilizando un
circuito electrónico de adaptación se ha conseguido que la constante de proporcionalidad
sea: Ks=Ket/100.
Ejercicio 1
2 puntos
Modelar el útil mediante un diagrama de bloques. La entrada es la tensión aplicada en
bornas del motor, Ve, y las salidas son el par, P, y la tensión que lo mide, Vp.
1 punto
Simplificar el diagrama de bloques para obtener las funciones de transferencia P/Ve y
Vp/Ve.
1 punto
TEORÍA DE SISTEMAS
Curso 00/01, 1ª convocatoria (03/02/01)
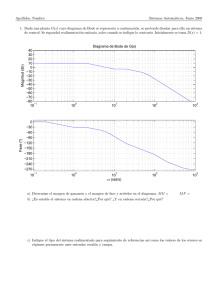
Aplicando en bornas del motor tensiones senoidales de frecuencia variable, se ha obtenido
el diagrama de Bode de Vp/Ve, que se muestra en la Figura 2.
-20
-23
-26
-29
-32
-35
-38
-41
-44
-47
-50
-53
-56
0
-15
-30
-45
-60
-75
-90
-105
-120
-135
-150
-165
-180
0
10
1
10
2
10
Figura 2: diagrama de Bode de Vp/Ve, frecuencia en rad/s, amplitud en dB, fase en grados
TEORÍA DE SISTEMAS
Curso 00/01, 1ª convocatoria (03/02/01)
Ejercicio 2
1 punto
Describir con toda la precisión posible cómo será en régimen estacionario senoidal la
tensión Vp cuando Ve es una tensión senoidal de frecuencia 2 Hz con mínimo y máximo de
0V y 10V respectivamente. Indicar clara y precisamente sobre el diagrama de Bode de la
Figura 2 los puntos empleados para medir.
Ejercicio 3
2 puntos
Identificar con toda la precisión posible la función de transferencia Vp/Ve a partir del
diagrama de Bode de la Figura 2, explicando breve pero claramente el proceso seguido
para la identificación.
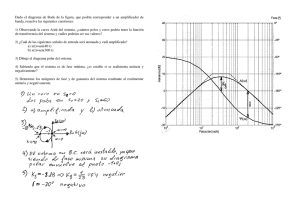
Para conseguir el control de par deseado, se compara la medida de éste (Vp) con una
tensión de referencia, o consigna, Vref, y la diferencia, o error, se introduce en un circuito
electrónico denominado regulador PI, cuya función de transferencia es K(Ti·s+1)/Ti·s, tal
como se muestra en la Figura 3, para obtener automáticamente la tensión Ve que se aplica
al motor.
Haciendo Ti=0.1, el lugar de las raíces para los distintos valores de K del sistema de control
realimentado es el mostrado en la Figura 3.
50
40
Vp
30
K
Ti.s+1
Ti.s
20
Ve
P
Vref
Motor + Eje
10
P
0
-10
-20
-30
-40
-50
-11
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Figura 3: control de par realimentado (control PI), y lugar de las raíces para los distintos valores de K
Dado el propósito de este sistema, interesa una respuesta precisa, rápida y sin
sobrepasamiento.
TEORÍA DE SISTEMAS
Curso 00/01, 1ª convocatoria (03/02/01)
Ejercicio 4
1 punto
¿Qué par se alcanzará en régimen permanente si se aplica una consigna Vref=1 V?
Ejercicio 5
1.5 puntos
Utilizando el método del lugar de las raíces, determinar el valor de K para que el sistema
presente un comportamiento de primer orden dominante con constante de tiempo 0.5.
1 punto
Para el valor de K calculado, describir aproximadamente las características de la respuesta
transitoria al escalón.
0.5 puntos
Ejercicio 6
2 puntos
Añadiendo al diagrama de Bode de la Figura 2 el de (Ti·s+1)/Ti·s, con Ti=0.1, calcular el
valor de K apropiado razonando en términos de margen de fase y frecuencia de corte.
1.5 puntos
Para el valor de K calculado, describir aproximadamente las características de la respuesta
transitoria al escalón.
0.5 puntos
Ejercicio 7
0.5 puntos
Resumir brevemente los resultados obtenidos:
• ¿Es coherente tu respuesta al Ejercicio 1 con el diagrama de Bode de la Figura 2?
• ¿Es coherente tu respuesta al Ejercicio 3 con el lugar de las raíces de la Figura 3?
• Las características de la respuesta transitoria obtenidas en los Ejercicios 5 y 6, ¿son
coherentes entre sí y con la especificación (respuesta rápida y sin sobrepasamiento)?
¿Cuál te parece mejor? ¿Crees que, a pesar de las aproximaciones que hayas tenido
que hacer, serán razonablemente similares a la realidad?
 0
0