Un sistema de control es un conjunto de subsistemas y procesos
Anuncio

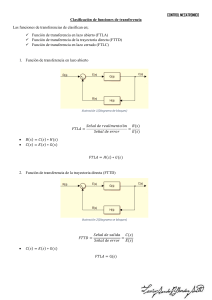
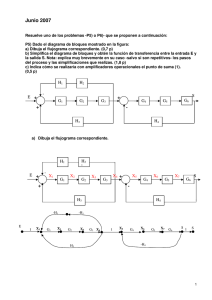
Murguia Ochoa Jaime Ensayo 1 teoría de control I Ingeniería de control moderna Katsuhiko Ogata Un sistema de control es un conjunto de subsistemas y procesos con el fin de controlar una salida de esos procesos. Sus ventajas son que nos permite usar cosas que de forma manual no podríamos usar por ejemplo un elevador. En un sistema de control la entrada representa una respuesta deseada, la salida es la respuesta real al estimulo dado de entrada, a la diferencia de la entrada con la salida se le conoce como error de estado estable y puede se defecto o inherente al mismo sistema. Un sistema de lazo abierto es un sistema que no es realimentado cuenta con la entrada de los transductores para realizar el proceso y con perturbaciones o ruido que todo proceso de control tiene y no puede corregirlo. El sistema de lazo cerrado (realimentado) es un sistema realimentado con el fin de corregir errores o perturbaciones como el ruido, que en el lazo abierto no puede medir ni comparar señales ni corregirlas. El diseño del diagrama a bloques describe las componentes del sistema esto es función o hardware y muestra sus interconexiones. El análisis y diseño de un sistema de control se concentra en tres objetivos principales: Reproducir la respuesta transitoria Reducir los errores en estado estable Alcanza la estabilidad Para diseñar un sistema de control se requieren los siguientes pasos: 1. Determinación de un sistema físico y especificaciones a partir de los requerimientos. 2. Trazo de un diagrama de bloques funcional. 3. Representación de un sistema físico mediante un diagrama esquematizo. 4. Uso del diagrama esquemático para obtener un modelo matemático como lo es un diagrama a bloques. 5. Reducción del diagrama a bloques. 6. Análisis y diseño del sistema para satisfacer los requerimientos y especificaciones especiales que incluyen la estabilidad, respuesta transitoria y desempeño en estado estable. La función de transferencia nos permite combinar representaciones matemáticas de los subsistemas para obtener una representación total del sistema. Si analizamos un sistema con la ecuación diferencial general de orden n lineal e invariable en el tiempo, utilizando el espacio y las trasformadas de Laplace, al cociente de la trasformada de la salida C(s) dividido entre la transformada de la entrada R(s) a este cociente le llamamos la función de transferencia. Esta función también se puede aplicar para el análisis de redes pasivas y circuitos con amplificadores operacionales sistemas mecánicos y electromecánicos formados por resistores, capacitares e inductores siempre con condiciones iniciales en el voltaje y en la corriente igual a cero. Las funciones de transferencia también se obtienen por medio de las leyes de corriente y de voltaje de Kirchhoff ya sea con el método de mallas o de nodos.