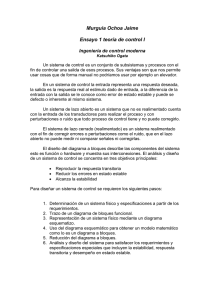
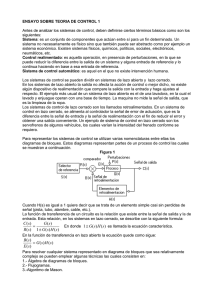
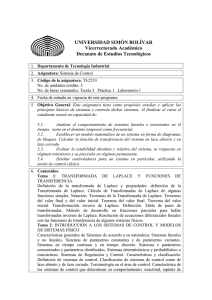
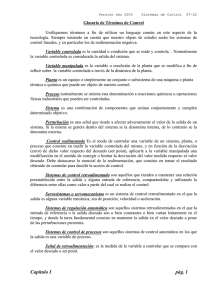
TECNOLOGíA DE CONTROL Sistemas de control Partiendo del diagrama de bloques del deposito de agua del inodoro de un baño lo podemos representar de las siguientes maneras: Sistema de control en lazo abierto Sistema de control en lazo cerrado AGUA AGUA AGUA TANQUE TANQUE (Entrada) (SALIDA) (ENTRADA) AGUA (SALIDA) FLOTADOR El tanque no vuelve a llenarse El tanque vuelve a llenarse Donde cada símbolo representan hasta ahora: BLOQUES: En cada bloque se realiza algún tipo de transformación (o transferencia) de materia, energía o información. VÁLVULA: Elementos que regulan el paso de un flujo de energía o materia. Siempre necesitan de alguien o algo que los controle. FLUJO DE MATERIA: Un canal por el cual se transporta la materia. DIAGRAMA DE BLOQUES: Los diagramas de bloques se emplean, con frecuencia, para modelar todo tipo de sistemas. Un diagrama de bloques se puede utilizar simplemente para describir la composición e interconexión de un sistema. O se puede emplear, junto con funciones de transferencias, para describir las relaciones causa y efecto a través de todo el sistema. REPRESENTACIONES DE LOS SISTEMAS DE CONTROL Entre los elementos de diagrama de bloques empleados frecuentemente en sistemas de control, nos encontramos con dispositivos detectores que actúan como un punto de unión para la comparación de señales. El dispositivo físico involucrado mas sencillo que podemos encontrar es el potenciómetro o cualquier otro transductor para procesamiento de señales. En general los dispositivos detectores realizan operaciones matemáticas simples como suma y resta; multiplicación y división (estas ultimas no lineales) y algunas veces combinaciones de éstas. Diego Oscar Blanco 1/4 TECNOLOGíA DE CONTROL Combinación entre líneas de actuación: la interacción entre bloques viene representada por líneas de actuación que llevan en su extremo una flecha que indica el sentido del flujo, tal como se ejemplifican a continuación. R R Ramificación de una línea de actuación R R1 Suma O resta de dos variables Y= R1 ± R2 + ± R2 Combinación básica de bloques Conexión en serie o Cascada Y R R Y = G1 .G 2 G1 R Y G2 G1.G2 Conexión en paralelo Y R G = G1 + G2 + ± R Y R G1 ± G2 Y G2 ELEMENTOS DE UN SISTEMA DE CONTROL REALIMENTADO A continuación se muestra el diagrama de bloques de un sistema de control realimentado lineal; y la terminología que lo define. R + U Y G -B H R = entrada de referencia (comando). Y = salida (variable controlada). B = señal de realimentación. U = señal actuante = señal de error E cuando H = 1. H = función de transferencia de lazo. G.H = L = función de transferencia de lazo. Diego Oscar Blanco 2/4 TECNOLOGíA DE CONTROL G = función de transferencia de trayectoria directa. M = Y / R = función de transferencia en lazo cerrado o función de transferencia del sistema. OBTENCIÓN DE FUNCIÓN DE TRANSFERENCIA Sistema de control en lazo abierto G R Y M= Y = G porque Y= G.R R Para un ejemplo cualquiera G puede ser la ganancia de un amplificador. SISTEMA DE CONTROL EN LAZO CERRADO (A TRAVÉS DE UN BLOQUE REALIMENTADO) R U -B Y G H (1) Y = G .U (2) U = R – B (3) B = H . Y Sustituimos en (1) por (2) y (3) Y = G . (R – B) Y = G . (R – HY) Y. = GR – GHY Y + GHY = GR Y(1 + GH) = GR Función de transferencia total para un sistema de control en lazo cerrado con realimentación negativa Y G = R 1 + GH CONEXIÓN EN LAZO CERRADO CON REALIMENTACIÓN UNITARIA R Y G -B Diego Oscar Blanco 3/4 TECNOLOGíA DE CONTROL (1) Y = G . E (2) E = R – B donde B = Y Remplazando (2) en (1) Y = G (R – B) Y = G . (R – Y) Y = GR – GY agrupo las Y Y + GY = GR Y (1 + G) = GR G Y = R 1+ G saco factor común Función de transferencia total en lazo cerrado con realimentación directa o unitaria SISTEMAS DE CONTROL LINEALES Vs NO LINEALES Estrictamente hablando, los sistemas lineales no existen en la práctica, ya que todos los sistemas físicos son no lineales en algún grado. Por ejemplo los amplificadores usados en los sistemas de control a menudo exhiben un efecto de saturación cuando la señal de entrada es muy grande; el campo magnético de un motor normalmente tiene propiedades de saturación (lazo de histéresis). Otro efectos no lineales que se encuentran en sistemas de control son el juego entre engranajes acoplados, las características de resorte no lineales; etc. Por lo que una caracterización realista de un sistema puede requerir ecuaciones no lineales y / o variantes en el tiempo de difícil resolución.1 El caracterizar a un sistema de control en forma lineal, nos permite hacer suposiciones y aproximaciones a sistemas físicos utilizando la teoría de sistemas lineales, dado que existen una gran cantidad de técnicas analíticas y graficas para fines de diseño y análisis. Y que en los sistemas de control, es práctica común primero diseñar el controlador en base a un modelo de sistema lineal despreciando las no linealidades del sistema. Esto se hace linealizando el sistema con respecto a un punto de operación nominal (partiendo de la identificación, luego la suposición y por ultimo la linealización y modelado). Entonces, el controlador diseñado se aplica al modelo del sistema no lineal para su evaluación o rediseño mediante simulación en computadora. 1 Estos son de difíciles de tratar en forma matemática y no existen métodos generales disponibles para resolver una gran variedad de clases de sistemas de control no lineales. Diego Oscar Blanco 4/4