Diseño de reguladores en el dominio del tiempo
Anuncio

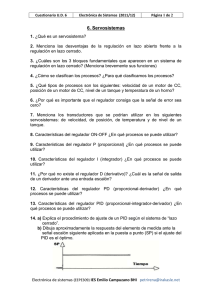
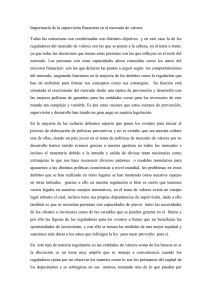
Department of Systems Engineering and Automatics Regulación Automática TEMA 6: Diseño de reguladores en el dominio del tiempo Celso Fernández Silva. 2001 - 2007 http://www.aisa.uvigo.es/docencia/ Diseño de reguladores en el dominio del tiempo Índice Especificaciones de diseño Acciones básicas de control Diseño de reguladores PID • Diseño de un regulador P Efecto del regulador P • Diseño de un regulador PD. Desarrollo Criterios para situar el polo y el cero del regulador Ángulos de compensación grandes Efecto del regulador PD • Diseño de un regulador PI. Desarrollo Efecto del regulador PI • Diseño de un regulador PID. Desarrollo Efecto del regulador PID Diseño de reguladores por cancelación: Truxal ISA - Vigo 2007 Diseño de reguladores en el dominio del tiempo 2 Ejemplo de regulador P X(s) _ C (s ) 3 ( s + 1) ⋅ ( s + 5) Y(s) Especificaciones: M p ≤ 4.5% ; M p = e t p ≤ 1.5seg ; t p = M p↓ θ ↓ δ ↑ t s ≤ 2 seg ; t s = π σ −π tg (θ ) π ωd δ ≥ 0.7025 θ ≤ 45.37 º ωd ≥ 2.09 σ ≥ 1.57 erp ≤ 1 = 0.33 3 θ sd = [− 3 ± 2.5 j ] 3 ⋅ KC =1 m1 ⋅ m2 C ( s) = K C KC = K p = lim G ( s ) ⋅ H ( s ) = s →0 erp = ISA - Vigo 2007 Criterio del módulo 3.2 ⋅ 3.2 = 3.41 3 3 ⋅ 3.41 = 2.05 5 1 1 = = 0.32 1 + K p 1 + 2.05 Diseño de reguladores en el dominio del tiempo 3 Regulador PD Im X(s) _ C (s ) G (s ) Y(s) Mp =e K2 K3 H (s ) K1 ωn θ − pPD − p2 − z PD − p1 −σ K GP ( s ) = G ( s ) ⋅ H ( s ) = s ⋅ ( s + p1 ) ⋅ ( s + p2 ) C ( s) = K C tp = π ωd ts = π σ ωd −π tg (θ ) Re Permite definir el régimen transitorio ( s + z PD ) ( s + pPD ) ISA - Vigo 2007 Diseño de reguladores en el dominio del tiempo 4 Regulador PD Desarrollo: δ, θ, ωn Especificaciones ¿Ajuste de ganancia ? no Introducir un PD L. R. sistema no compensado sd sd’ C ( s) = K C ( s + z PD ) ( s + pPD ) Criterio del argumento ϕc sd ωn θ − pPD − p2 − z PD − p1 ISA - Vigo 2007 Situar pPD y zPD de acuerdo con ϕc Criterio del módulo KC Verificar cumplimiento especificaciones Diseño de reguladores en el dominio del tiempo 5 Regulador PD sd (0) − (θ p 0 + θ p1 + θ p 2 ) ≠ (2q + 1)π β − pPD − p2 θ p2 θ p1 α − z PD θ θ p0 − p1 (α + 0) − ( β + θ p 0 + θ p1 + θ p 2 ) = (2q + 1)π ϕ c = (90 − β ) − (90 − α ) = α − β ϕc − pPD ISA - Vigo 2007 ϕ c = α − β = (θ p 0 + θ p1 + θ p 2 ) − (0) + (2q + 1)π − z PD Diseño de reguladores en el dominio del tiempo 6 Regulador PI Im X(s) _ C (s ) G (s ) Y(s) sd ≅ s N H (s ) sN GP ( s ) = K s ⋅ ( s + p1 ) ⋅ ( s + p2 ) sd El régimen transitorio prácticamente no cambia ωn θ − p2 C (s) = K C − p1 − z PI ( s + z PI ) ( s + pPI ) 1 (s + ) T ; C (s) = K C 1 (s + ) β ⋅T ISA - Vigo 2007 Re − pPI ¿El régimen permanente? Criterio del módulo en sd y en sN β >1 Diseño de reguladores en el dominio del tiempo Constante de error 7 Regulador PID Kvdeseada m3 erp ⇒ Kvdeseada ⇒ KcPD ≥ ⇒ ≤ 0.596 Kv0 m4 zpd m3 m4 α Kcpd -0.5 4.77 5 -5 0.954 0.1 6.25 -1 4.58 5.32 -5.6 0.86 0.17 6.93 -1.5 4.44 5.8 -6.37 0.76 0.235 7.84 -2 4.36 6.49 -7.34 0.67 0.272 8.89 -2.5 4.33 7.51 -8.64 0.57 0.289 10.46 -2.69 4.334 8.03 -9.27 0.539 0.29 11.04 -3 4.36 9.03 -10.43 0.48 0.287 12.42 -3.5 4.44 11.46 -13.11 0.38 0.267 15.69 -4 4.58 15.61 0.29 0.228 20.56 ISA - Vigo 2007 ppd m3/m4 -17.5 Diseño de reguladores en el dominio del tiempo 8 Regulador PID ISA - Vigo 2007 Diseño de reguladores en el dominio del tiempo 9 Regulador por cancelación: Truxal M (s ) X(s) _ C (s ) KM M (s) = s+d G (s ) Y(s) KM 1 ⋅ C (s) = s + (d − K M ) G ( s) C(s) ha de ser realizable nC ≥ mC nC ≥ mC nC = mG + nM mG + nM ≥ nG + mM nM − mM ≥ nG − mG Diseño de reguladores en el dominio del tiempo 10 mC = nG + mM ISA - Vigo 2007 Diseño de reguladores en el dominio del tiempo Bibliografía básica Ogata, K. “Ingeniería de Control Hispanoamericana. 2ª edición 1993. Moderna”, Prentice Hall (A-26, A-69, A-193, A-328, A-329, A-330, A-331, A-332) Puente, E.A. “Regulación Automática" (Tomos I y II), Sección de Publicaciones de la U.P. de Madrid. 1980. (A-11, A-46, A-212, A-213, A-420, A-421, A-422) Barrientos, A. et al. “Control de Sistemas Contínuos. Problemas resueltos”, McGraw-Hill, Madrid 1996. (A-388, A-389, A-390, A-391, A-392, A-393, A-394) J. Gil Nobajas, A. Rubio Díaz-Cordovés, “Ingeniería de control - Control de sistemas continuos”. http://www.ceit.es/mechanics/people/cv/jjgil. San Sebastián, 2004. ISA - Vigo 2007 Diseño de reguladores en el dominio del tiempo 11 Diseño de reguladores en el dominio del tiempo Bibliografía complementaria Franklin, G.F. et al. “Control de sistemas dinámicos con retroalimentación”, Addison-Wesley, 1991. (A-180, A-181, A-182) Dorf, R.C. y Bishop, R. “Sistemas de control moderno”, 10ª edición, Prentice Hall 2005. (A-426) Sirgo Blanco, J.A. et al. “Apuntes de Regulación Automática”, http://isa.uniovi.es/docencia/raeuitig/. () Kuo, B.C. “Sistemas automáticos de control”. Prentice Hall 1991. (A-152) ISA - Vigo 2007 Diseño de reguladores en el dominio del tiempo 12