Transformada de Laplace
Anuncio

Descripción Analítica de
Sistemas SISO
Indice
• 1. Modelo matemático
• 2. Linealización
• 3. Transformada de Laplace
• 4. Concepto de Función de Transferencia
• 5. Ejemplos de modelos de sistemas
• 6. Diagramas de bloques
Transformada de Laplace
• Transformada:
F s=L [f t ]=∫ f t e dt
−st
Condición de existencia:
∫∣f t e
−σt
∣dt∞
• Transformada inversa: (resolución mediante descomposición en
fracciones simples y el uso de tablas)
f t =L−1 [ F s ]=
1
F s ·e s·t ds
∫
2πj
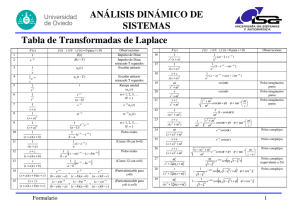
Tabla de Transformadas de Laplace
F (s)
1
e −Ts
f (t ) t ≥ 0 ( f (t ) = 0 para t < 0)
δ (t )
δ (t − T )
3
1
s
u 0 (t )
4
1 −Ts
e
s
1
s2
1
sn
u 0 (t − T )
1
s+a
1
(s + a) 2
1
(s + a) n
1
( s + a)( s + b)
1
s( s + a)
s+z
(s + a)( s + b)
s
(s + a)( s + b)
1
( s + a)( s + b)( s + c )
e − at
e − at u 0 (t )
te − at
te − at u 0 (t )
1
t n −1e − at
(n − 1)!
1
(e − at − e − bt )
b−a
1
(1 − e− at )
a
n = 1, 2, 3, …
0! = 1
e − at
e− bt
e− ct
+
+
(b − a)(c − a) (c − b)(a − b) (a − c)(b − c)
(Particularizable para
c=0)
( s + z)
(s + a )( s + b)( s + c )
( z − a)e − at
( z − b)e − bt
( z − c)e − ct
+
+
(b − a)(c − a) (c − b)(a − b) (a − c)(b − c)
(Particularizable para
c=0 ó z=0)
1
2
5
6
7
8
9
10
11
12
13
14
15
Escalón unitario
retrasado T segundos
Rampa unidad
tu 0 (t )
n = 1, 2, 3, …
0! = 1
t
t n −1
(n − 1)!
Polos reales
(Como 10 con b=0)
[
1
( z − a)e − at − ( z − b)e − bt
b−a
1
ae − at − be − bt
a −b
[
Observaciones
Impulso de Dirac
Impulso de Dirac
retrasado T segundos
Escalón unitario
]
]
Polos reales
(Como 12 con z=0)
17
18
19
20
21
22
25
26
27
ω
( s + a )2 + ω 2
s+a
( s + a )2 + ω 2
s+z
( s + a )2 + ω 2
ωn2
s + 2ξω n s + ωn2
s
(s 2 + 2ξωn s + ωn2 )
2
28
29
cos(ωt )
z2 +ω2
ω
sen(ωt + φ ) φ = tan −1
ω2
z
1
(1 − cos(ωt ))
ω2
1
s(s 2 + ω 2 )
s+z
s(s 2 + ω 2 )
23
24
f (t ) t ≥ 0 ( f (t ) = 0 para t < 0)
1
(at − 1 + e − at )
a2
1
(1 − e − at − ate − at )
a2
1
( z − ze − at + a(a − z )te − at )
a2
sen(ωt )
F (s)
1
s 2 ( s + a)
1
s( s + a) 2
s+z
s( s + a) 2
ω
s2 + ω2
s
s2 + ω 2
s+z
s2 + ω 2
16
ωn2
s( s + 2ξω n s + ωn2 )
2
Observaciones
Polos imaginarios
puros
Polos imaginarios
puros
Polos imaginarios
puros
z
z2 + ω2
ω
−
cos(ωt + φ ) φ = tan −1
2
ω
ω4
z
e− at sen(ωt )
Polos complejos
e− at cos(ωt )
Polos complejos
( z − a) 2 + ω 2 − at
ω
e sen(ωt + φ ) φ = tan −1
ω2
z−a
ωn
e−ξω n t sen ωn 1 − ξ 2 t
1− ξ 2
)
(
−
1−
1
1− ξ 2
1
1− ξ 2
(
e−ξω n t sen ωn 1 − ξ 2 t + φ
(
)
e−ξω n t sen ωn 1 − ξ 2 t + φ
φ = cos −1 ξ
)
φ = cos −1 ξ
Polos complejos
Polos complejos
(equivalente a 24)
Polos complejos
Transformadas de funciones típicas (I)
• Función escalón:
{
f(t)
}
M
0 para t 0
f t =Mu0 t =
F s =
M para t≥0
s
M
{
Función escalón unitario: u 0 t =
}
1
0 para t 0
U 0 s =
1 para t ≥0
s
t
f(t)
• Función rampa:
f t =M·t·u0 t =
{
}
M
0 para t<0
F s = 2
M·t para t≥0
s
M
• Funciones parabólicas:
{
t
1
t
f(t)
}
0 para t<0
M·m!
f t =M·t ·u 0 t =
F
s
=
m
M·t para t≥0
s m+1
m
1
M
Transformadas de funciones típicas (II)
• Función impulso de Dirac:
∞↑
{
}
0 para t<0
δ t = ∞ para t=0 Δ s=1
0 para t>0
• Funciones exponenciales:
0 para t<0
M
f t =M·e−a·t ·u0 t =
F
s
=
s+a
M·e−a·t para t≥0
{
δ(t)
t
f(t)
}
M
• Función senoidal:
f t =M·sen ω·t ·u 0 t =
M·ω
F s = 2 2
s +ω
t
{
0 para t<0
M ·sen ω·t para t≥0
}
M
f(t)
/ω
π
-M
t
2·π
/ω
Teoremas de la Transformada de Laplace
• Teorema del valor inicial:
f 0 =limt 0 f t =lims ∞ s·F s
• Teorema del valor final:
siexiste lim t ∞ f t ⇒f ∞=lim t ∞ f t =lims 0 sF s
• Teorema de convolución:
F s =L [f t ]
G s =L [g t ]
F s ·G s =L [ f t ∗g t ]
f t ∗g t =∫ f t −τ ·g τ ·dτ=∫ g t −τ ·f τ ·dτ
Concepto de Función de Transferencia (I)
X(s)
x(t)
Y(s)
G(s)
y(t)
“La Función de transferencia (FdT) de un sistema es el cociente entre la
transformada de Laplace de la variable de salida y la transformada de Laplace
de la variable de entrada, considerando nulas las condiciones iniciales”
a0
[
d n y t
n
+a 1
d n−1 y t
n−1
...+a n y t =b 0
d m x t
m
+b1
d m−1 x t
m−1
...+bm x t
dt
dt
dt
dt
a0 s n +a1 s n−1...+an−1 s+a n ·Y s = b 0 s m +b1 s m−1...+b m−1 s+bm ·Xs
]
[
]
m
m−1
Y s b 0 s +b 1 s ...+bm−1 s+bm
G s =
=
X s a0 s n +a1 s n−1...+a n−1 s+a n
La ecuación diferencial caracteriza el comportamiento del sistema en el dominio del
tiempo y con las transformadas de Laplace se pasa al dominio complejo.
Se pasa de ecuaciones diferenciales ordinarias a algebraicas en la variable compleja s.
Concepto de Función de Transferencia (II)
m
G s =
b0 s +b1 s
m−1
...+bm−1 s+b m
X(s)
x(t)
G(s)
g(t)
Y(s)
y(t)
a0 s n +a 1 s n−1 ...+an−1 s+an
• Polinomio característico: Polos
• Raíces del numerador: Ceros
a0 sn +a1 s n−1...+an−1 s+an=0
b0 s m +b1 s m−1...+bm−1 s+b m=0
• Un sistema físico es realizable si ai y bi son números reales y n≥m
(tiene igual o mayor número de polos que de ceros)
• La antitransformada de G(s), g(t), es la “función ponderatriz” o
“respuesta impulsional” del sistema:
−1
gt =L [ Gs ]
Y s =G s·X s
y t =gt ∗x t
x(t)=δ (t)
g(t)
y(t)=g(t)
Diagrama Funcional o de Bloques
• Bloque con Función de Transferencia:
X(s)
G(s)·X(s)
G(s)
• Sumadores o Comparadores:
X1(s)
± X1(s)± X2(s)
X1(s)
±
±
±
X3(s)
X2(s)
• Puntos de Bifurcación:
± X1(s)± X2(s)± X3(s)
X2(s)
±
X(s)
X(s)
X(s)
±
Reducción de un Diagrama de Bloques
• Bloques en serie o cascada:
X(s)
G1(s)
[G1(s)·G2(s)]·X(s)
G2(s)
X(s)
G1(s)·G2(s)
[G1(s)·G2(s)]·X(s)
• Bloques en paralelo:
G1(s)
X(s)
G2(s)
±
[± G1(s)± G2(s)]·X(s)
X(s)
± G1(s)± G2(s)
[± G1(s)± G2(s)]·X(s)
±
• Lazo de realimentación:
X(s) +
Y(s)
G(s)
_
+
H(s)
X(s)
G(s)
1± G(s)·H(s)
Y(s)