Examen.Sep05
Anuncio

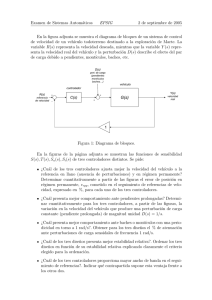
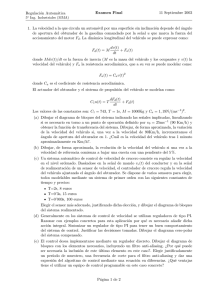
Examen de Sistemas Automáticos EPSIG 2 de septiembre de 2005 En la figura adjunta se muestra el diagrama de bloques de un sistema de control de velocidad de un vehı́culo todoterreno destinado a la exploración de Marte. La variable R(s) representa la velocidad deseada, mientras que la variable Y (s) representa la velocidad real del vehı́culo y la perturbación D(s) describe el efecto del par de carga debido a pendientes, montı́culos, baches, etc. D(s) pert. de carga (pendientes montículos baches…) vehículo controlador R(s) referencia de velocidad + C(s) Y(s) + G(s) + velocidad real 1 Figura 1: Diagrama de bloques. En la figuras de la página adjunta se muestran las funciones de sensibilidad S(s), T (s), Su (s), Si (s) de tres controladores distintos. Se pide: ¿Cuál de los tres controladores ajusta mejor la velocidad del vehı́culo a la referencia en llano (ausencia de perturbaciones) y en régimen permanente? Determinar cuantitativamente a partir de las figuras el error de posición en régimen permanente, erpp , cometido en el seguimiento de referencias de velocidad, expresado en %, para cada uno de los tres controladores. ¿Cuál presenta mejor comportamiento ante pendientes prolongadas? Determinar cuantitativamente para los tres controladores, a partir de las figuras, la variación en la velocidad del vehı́culo que produce una perturbación de carga constante (pendiente prolongada) de magnitud unidad D(s) = 1/s. ¿Cuál presenta mejor comportamiento ante baches o montı́culos con una periodicidad en torno a 1 rad/s?. Obtener para los tres diseños el % de atenuación ante perturbaciones de carga senoidales de frecuencia 1 rad/s. ¿Cuál de los tres diseños presenta mejor estabilidad relativa?. Ordenar los tres diseños en función de su estabilidad relativa explicando claramente el criterio elegido para la ordenación. ¿Cuál de los tres controladores proporciona mayor ancho de banda en el seguimiento de referencias?. Indicar qué contrapartida supone esta ventaja frente a los otros dos. Examen de Sistemas Automáticos EPSIG 2 de septiembre de 2005 S T 20 20 10 10 0 0 −10 −10 −20 −20 −30 −40 −2 10 −30 C1(s) C2(s) C3(s) −1 10 0 10 1 −40 −2 10 2 10 10 C1(s) C2(s) C3(s) −1 10 Su 0 10 1 2 10 10 Si 40 10 30 0 20 −10 10 −20 0 −30 −10 −40 −20 C (s) 1 C (s) 2 C (s) −30 C (s) 1 C (s) 2 C (s) −50 3 −40 −2 10 −1 10 0 10 1 10 3 −60 −2 10 2 10 −1 10 0 10 1 10 Figura 2: Funciones de sensibilidad para los controladores C1 (s), C2 (s), C3 (s) Funciones de sensibilidad. Función de sensibilidad: 1 1 + CG Función de sensibilidad complementaria: S= T = CG 1 + CG Función de sensibilidad de control: Su = C 1 + CG Función de sensibilidad a la entrada: Si = G 1 + CG 2 10 Examen de Sistemas Automáticos EPSIG 2 de septiembre de 2005 3. En las figuras que siguen se presenta el sistema de control con el que se va a trabajar y el trazado de su lugar de las raíces. Root Locus 5 4 3 2 18 compensador (s+a)(s2+bs+c) sistema 1 Imaginary Axis - k 0 -1 -2 -3 -4 -5 -5 -4 -3 -2 -1 0 Real Axis 1. Obtenga los valores de a, b y c. • Para k = 9 ¿es estable en cadena abierta? ¿y en cadena cerrada? • Realice los siguientes análisis ante entrada escalón unitario en la referencia, comentando la respuesta dinámica de forma cualitativa y con alguna gráfica a mano alzada: o En cadena abierta (suponiendo cortada la realimentación) y en cadena cerrada (para el punto de funcionamiento indicado mediante cuadrados), comparando ambas. Ojo, sólo se emplean los cuadrados en este apartado. o ¿Cómo evolucionará la dinámica del sistema realimentado al aumentar o disminuir k? ¿y la del sistema en cadena abierta? o ¿Cómo variarían los análisis anteriores si el polo simple estuviese en la cadena de realimentación en lugar de en la directa? 2. Análisis y diseño en frecuencia. Cada subapartado continua a partir del anterior. • Dibuje el diagrama de Bode del sistema en cadena abierta. • Elija el compensador proporcional necesario para que el error de posición del sistema en cadena cerrada sea del 10% y dibuje el diagrama de Bode del sistema más el compensador. • Para el punto anterior, obtenga margen de ganancia, margen de fase y estime un ancho de banda aproximado para el sistema realimentado. • Diseñe el compensador más sencillo que consiga un MF de 30º sin reducir el ancho de banda y cumpliendo la especificación de permanente dada. 3. El diseño anterior se ha hecho suponiendo captador de ganancia unitaria y respuesta instantánea. Al llevarlo a la práctica es necesario seleccionar uno comercial. Una de sus características es la constante de tiempo (se asimila un comportamiento de primer orden). Indique qué rango de constantes de tiempo: • serían admisibles para admitir la hipótesis de instantaneidad. • proporcionarían un comportamiento inestable. 1