Examen de Sistemas Autom´ aticos (4 PN) 17 de febrero de 2004
Anuncio
 17 de febrero de 2004")
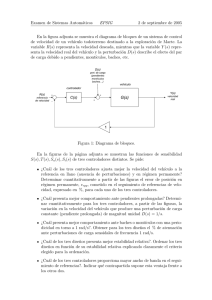
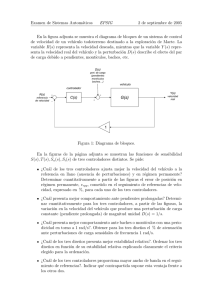
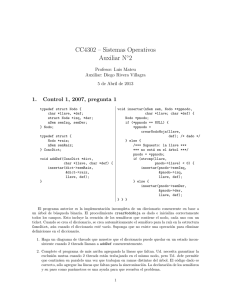
Examen de Sistemas Automáticos (4o PN) 17 de febrero de 2004 Problema. Se pretende diseñar el sistema de control de velocidad de crucero de un vehı́culo. El vehı́culo, funcionando en 5a marcha responde al siguiente modelo: dv(t) = f (t) − b · v(t) − c · v(t)2 − fpend (t) dt donde v(t) es la velocidad del vehı́culo, f (t) es la fuerza aplicada por el motor, m = 1560Kg es la masa del vehı́culo, b = 20 Ns/m es la constante de fricción mecánica, c = 0.1 Ns2 /m2 es la constante de fricción aerodinámica y fpend (t) es la fuerza ejercida por el propio peso del vehı́culo en la dirección de avance como consecuencia de una pendiente en la carretera. La fuerza f (t) es transmitida al vehı́culo de forma instantánea a través de una señal de tensión u(t) aplicada a un servomotor que actúa sobre la mariposa (válvula que permite mayor o menor entrada de combustible) con una ganancia del conjunto servomotor-mariposa Km = 100N/V. Para su control se utiliza un regulador de tipo proporcional-integral (PI), implementado mediante un circuito electrónico que responde al siguiente modelo Z u(t) = Kp · e(t) + Ki · e(t)dt m donde e(t) = r(t) − vs (t) es la diferencia entre la referencia de velocidad r(t) y la medida de velocidad aportada por el sensor vs (t), siendo u(t) la señal de control que actúa sobre la mariposa. El sistema de control lleva incorporado un sensor de velocidad que produce una V señal de tensión, vs (t) siendo su ganancia Ks = 5010m/s y su respuesta instantánea (constante de tiempo Ts ≈ 0). Se pide: 1. Obtener el modelo lineal del vehı́culo cuando éste circula a una velocidad v0 = 30 m/s en llano (fpend = 0); Nota: si no se ha sabido resolver el primer apartado, supóngase una función de transferencia del sistema mariposa-vehı́culo G(s) = V (s) 3.846 = U (s) 60s + 1 Con esta información es posible resolver de forma independiente la mayorı́a de los apartados. 2. Obtener el diagrama de bloques del sistema de control, indicando claramente todos los bloques (mariposa, vehı́culo, sensor, regulador). 3. Se decide ajustar el regulador con los valores Kp = 10 y Ki = 0. Calcular el error de posición en régimen permanente erpp cometido por el sistema de control, expresándolo en p.u. y en m/s. Repetir para Kp = 10 y Ki = 2. EPSIG. Universidad de Oviedo Examen de Sistemas Automáticos (4o PN) 17 de febrero de 2004 4. Para los mismos reguladores del apartado anterior, evaluar la variación de velocidad de crucero que se produce en régimen permanente cuando el sistema alcanza una zona en pendiente con fpend = 100N . 5. Se decide ajustar el regulador variando Kp fijando el valor de la acción integral en función de ésta como Ki = 0.2Kp . Describir de forma aproximada la dinámica del sistema en función de Kp . 6. Calcular el valor de Kp para que la sobreoscilación del sistema sea inferior al 10% 7. Calcular el valor de Kp para que el margen de fase sea de 60o 8. Indicar cómo afectarı́a en el diseño realizado el uso de un sensor con una dinámica no despreciable, con una constante de tiempo Ts > 0: a) Razonando mediante el lugar de las raı́ces b) Razonando en frecuencia 9. Se desea implementar el regulador diseñado en un microprocesador. Se pide: a) Describir todos los pasos a seguir para la implementación mediante discretización de cualquiera de los dos reguladores continuos R(s) diseñados en puntos anteriores. b) Calcular la ecuación en diferencias (algoritmo) del regulador para introducirlo en el microprocesador c) Describir el impacto respecto al diseño original continuo que tiene la implementación discreta. EPSIG. Universidad de Oviedo Examen de Sistemas Automáticos (4o PN) 17 de febrero de 2004 20 10 Amplitudes (dB) 0 −10 −20 −30 −40 −50 −60 −3 10 −2 10 −1 10 0 ω 10 1 10 2 10 90 Fases (º) 0 −90 −180 −270 −3 10 −2 10 −1 10 0 ω 10 1 10 Figura 1: Plantilla para diagramas de Bode EPSIG. Universidad de Oviedo 2 10