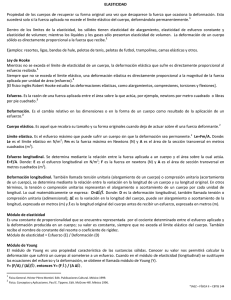
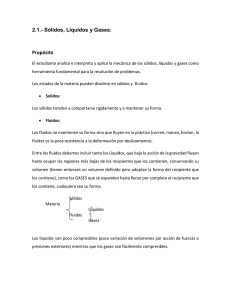
ELASTICIDAD
CUERPOS ELÁSTICOS E INELÁSTICOS. LÍMITE DE ELASTICIDAD
Hasta ahora hemos hablado de cuerpos ideales, como el sólido rígido, en el cual no se experimentan
deformaciones cuando actúan sobre él fuerzas exteriores. En realidad, lo que ocurre es que todos los cuerpos
se deforman como consecuencia de su propio peso. Estas deformaciones dependerán de la naturaleza del
sólido o de las fuerzas que actúen sobre él. Así, en un sólido no deformado, las distancias intermoleculares
permanecen constantes y consideraremos que ese sólido se encuentra en equilibrio.
Si actúan sobre ese sólido fuerzas externas producirán en él unas deformaciones dando lugar a una valoración
de las distancias intermoleculares, originando en el sólido unas fuerzas interiores que denominaremos fuerzas
elásticas, y que se opondrán a las fuerzas exteriores.
Si al suprimir esas fuerzas exteriores, el sólido deformado recupera su forma primitiva, se dice que tiene un
comportamiento elástico, pero si quedan deformaciones permanentes y residuales, se dice que el cuerpo tiene
un comportamiento inelástico o plástico.
Con esto surge el concepto de límite elástico, definido como el máximo valor de las fuerzas externas que un
cuerpo puede soportar comportándose como elástico. Sobrepasado este límite, se produce en el cuerpo una
deformación permanente.
• HIPÓTESIS: Una parte cualquiera del sólido ejerce acciones únicamente sobre las partes contiguas a
través de la superficie de separación.
• LEY DE HOOKE: Existe una relación entre la deformación y la acción o fuerza que origina esa
deformación.
TIPOS DE ESFUERZOS EN EL INTERIOR DE UN CUERPO
Fi
Fi " Fuerzas externas
S fi " Fuerzas internas
A1 A2
" ( Fi + fi ) = 0
" ( Mo . R ) + " ( mo . r ) = 0
Fi
De donde: R y Mo F.ext.
fi r y mo F. int.
A1 S Por tanto: R + r = 0 − R = r
Mo + mo = 0 −Mo = mo
1
CASOS POSIBLES:
1º ..:: r " 0 y m = 0
rn = k . u tracción
• rn " 0, rs = 0
rn = − k . u compresión
• rn = 0, rs " 0 esfuerzo constante o cizalladura
• rn " 0, rs " 0 caso compuesto de los anteriores
2º ..:: r = 0 y m " 0
• mn = 0, ms " 0 flexión
• mn " 0, ms = 0 torsión
• mn " 0, ms " 0 caso compuesto de los anteriores
3º ..:: r " 0 y m " 0
4º ..:: r = 0 y m = 0 no hay esfuerzos internos
ALARGAMIENTO POR TRACCIÓN
F
"L
L
"r
r
• MÓDULO DE YOUNG : Representa la tensión ( F / S ) necesaria para alargar el cuerpo al doble de
su longitud.
CONTRACCIÓN LATERAL EN LA TRACCIÓN
"r
"L
=−
r
" coeficiente de Piosson (no tiene dimensiones)
F
[Y] = [
] = M . L−1.T−2
L
S
CIZALLA POR FUERZA CORTANTE
S
F
2
Siempre que la deformación no sea muy grande, es proporcional a la fuerza deformadora ( Ley de Hooke ).
Y, G y son constantes de elasticidad.
FLEXIÓN
l (1) fibras alargadas
(2) fibras acortadas
(3) fibras neutras
•h
(2)
(3) I " momento de inercia de la sección plana
BASE APOYADA EN SUS EXTREMOS
F/2 F/2
h
F
l/2
l
TORSIÓN
r
l
M
ENSAYOS DE DEFORMACIÓN
F/S
R
NFGS
L
3
"l/l
L " comportamiento elástico " límite de elasticidad lineal
N " límite de elasticidad no lineal
F " límite de efluencia
G " se producen alargamientos para pequeños esfuerzos
R " límite de rotura
"L
1
F
=
.
L
Y
S
"L " deformación
L unitaria
Y
" módulo de
Young
F
S
" tensión,
esfuerzo unitario
=
1
F
G
.
S
Y
G=
2(1+
)
G " módulo de rigidez o cizalla del material
h=
l3
F
3.Y.I
(l/2
F
h = )3
.
3.Y.I
h=
l3
.F
2
48.Y.I
M=k.
k=
n . r4
G
2l
M " momento de torsor
k " modulo de torsión
4
 0
0