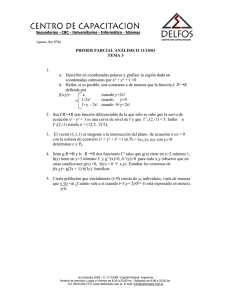
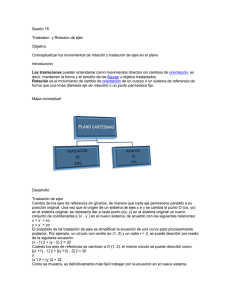
TRANSFORMACIÓN DE COORDENADAS INTRODUCCION: En geometría analítica, al igual que en física, es muy importante elegir un sistema de coordenadas, o referencia, adecuado con objeto de simplificar al máximo las ecuaciones y que el proceso de resolución sea lo más rápido posible. Ello se realiza mediante una transformación de ejes coordenados cuyo proceso general se puede considerar reducido a dos movimientos, uno de traslación y otro por rotación. DEFINICIÓN: Transformación es una operación por la cual una relación, expresión o figura se cambia en otra siguiendo una ley dada. ECUACIÓN ORDINARIA ( x h) 2 ( y k ) 2 r2 ECUACIÓN CANÓNICA TRANSFORMADA (1) x2 y2 r2 (2) Vemos entonces, que moviendo los ejes coordenados paralelamente a sí mismos, hemos transformado las coordenadas ( x, y) de un punto cualquiera de la circunferencia en las coordenadas ( x , y ) y como resultado hemos transformado la ecuación (1) en la ecuación más simple (2). La operación de mover los ejes coordenados en el plano coordenado a una posición diferente, paralelos a los ejes primitivos y dirigidos en el mismo sentido, se llama traslación de los ejes coordenadas. ALVITES CALIPUY MELBA ELIZABETH Página 1 TRASLACIÓN DE EJES. Sean OX y OY los ejes primitivos y O X y O Y , paralelos respectivamente a los anteriores, los nuevos ejes. Sean también (h, k) las coordenadas de O con respecto al sistema inicial. Supongamos que (x, y) son las coordenadas de un punto P con respecto a los ejes primitivos, ( x , y ) las coordenadas, del mismo punto, respecto de los nuevos. Para determinar x e y en función de x , y ; h y k se tiene: x MP MM MP h x y NP NN N P k y Por tanto, las ecuaciones de la traslación de ejes son: x x h, y y k Relación para simplificar una ecuación o para obtener las nuevas coordenadas de un punto. x x h y y k Relación para trasladar los ejes coordenadas a un punto dado x x h, y y k Ejemplo 1: Las nuevas coordenadas del punto P(7,4), al trasladar los ejes al nuevo origen O ( 3,6) son: Sea h 3 k 6 x x h = 7 ( 3) 10 y y k=4 6 2 Luego las nuevas coordenadas del punto son: P (10, 2) ALVITES CALIPUY MELBA ELIZABETH Página 2 Ejemplo 2: Determinar la nueva ecuación de la recta 2x 4 y 6 0 después de trasladar los ejes al nuevo origen O (2, 4) . Trazar los sistemas y la recta. Solución: Con h 2 y k 4 , tenemos: x x h , y y k x x 2 y y 4 Sustituyendo los valores de x y y en la ecuación de la recta: 2x 4 y 6 0 2 x 2 4 y 4 6 0 2x 4 4 y 16 6 0 2x 4 y 14 0 Como se observa en la figura, la recta no se mueve al encontrar el nuevo sistema, lo único que cambia es la ecuación en que pasa, de 2x 4 y 6 0 a 2x 4 y 14 0 ; la pendiente no cambia, pero sí la intersección con los eje x y y. Ejemplo 3: Hallar la ecuación de la curva 2 x2 3 y2 8 x 6 y 7 cuando se traslada el origen de coordenadas al punto 2, 1 . Solución: Sustituyendo x obtiene: 2 x x 2 2 2, y 3 y 1 y 1 en la ecuación dada se 2 8 x 2 6 y 1 7. Desarrollando y simplificando, se llega a la ecuación de la curva referida a los nuevos ejes. 2 x 2 3 y 2 18 . x2 9 y2 6 1 Esta es la ecuación de la elipse con centro en el nuevo origen, con el eje mayor sobre el 6 eje x y de semiejes a 3 , b ALVITES CALIPUY MELBA ELIZABETH Página 3 Ejemplo 4: Por medio de una traslación de ejes, transformar la ecuación 3x 2 4 y 2 6 x 24 y 135 en otra en la cual los coeficientes de los términos de primer grado sean nulos. Solución: Sustituyendo x e y por los valores x h e y k , respectivamente. 3x 2 4 y 2 6 x 24 y 135 3 x 2 h 4 y k 2 6 x h 24 y Desarrollando y agrupando tenemos: 3x 2 4 y 2 6h 6 x 8k 24 y k 135 3h 2 4k 2 6h 24k 135 . Si deseamos eliminar x , y debemos hacer cero sus coeficientes: De 6h 6 0 y 8k 24 0 se obtiene h 1 y k 3 , con lo cual resulta 2 2 3x 4y 102 . Esta es la ecuación de una hipérbola con centro en el origen, eje real o transversal sobre el eje x y semieje igual a 34 . Otro método. A veces, para eliminar los términos de primer grado de una ecuación, se sigue el método que se da a continuación. Dada la ecuación 3x 2 4 y 2 6 x 24 y 135 completando cuadrados tenemos: 3 x 1 2 4 y 3 2 102 Sustituyendo x 1 por x e y 3 por y se tiene: 3 x 2 4 y 2 102 . ALVITES CALIPUY MELBA ELIZABETH Página 4 ROTACIÓN DE EJES: Sean OX y OY los ejes primitivos y O‘X‘ y O’Y’ los nuevos ejes, siendo O el origen común de ambos sistemas. Representemos por el ángulo X‘OX de la rotación. Supongamos que (x, y) son las coordenadas de un punto P del plano con respecto a los ejes primitivos, y ( x , y ) las coordenadas del mismo punto, respecto de los nuevos ejes. Para determinar x e y en función de x , y , , se tiene: x OM ON MN x cos y sen y MP MM MP x sen y cos NN MP Por lo tanto, las formulas de la rotación coordenados son: x x cos y x sen de los ejes y sen y cos Por simplicidad el ángulo de rotación siempre se considera agudo o recto y positivo. Si se quiere obtener los valores de x y de y , se resuelve el sistema anterior considerando que las incógnitas son x , y . Luego: x x cos ysen y y cos xsen Llamadas ecuaciones recíprocas de rotación Ejemplo 5: Hallar las nuevas coordenadas del punto coordenados giran un ángulo de 30º entorno a su origen. P (3, 4) , cuando los ejes Solución: x x cos ysen 3cos30º ( 4)sen30º 3 3 2 4 y 1 2 3 3 2 2 Por lo tanto las coordenadas son P x , y son: ALVITES CALIPUY MELBA ELIZABETH y cos xsen 4cos30º 3sen30º ( 4) 3 1 3 2 2 2 3 3 2 3 3 2 2, 2 3 3 2 Página 5 Ejemplo 6: Obtenga una ecuación en las variables x , y de la gráfica de xy 4 bajo un ángulo de rotación de los ejes alrededor del origen con 45º Solución: Se tiene cos 45º 1 y sen45º 2 1 . Si se tiene 2 x x cos y sen 1 1 x x y 2 2 x y x 2 y x sen y cos 1 1 y x y 2 2 x y y 2 Sustituyendo en la ecuación xy 4 , se tiene: x y 2 x x2 y2 y2 2 2 x 8 4 4 2 x2 y 2 8 y 8 1 Ejemplo 7: Hallar el ángulo de rotación de ejes necesario para eliminar el término en xy de la ecuación 7 x2 6 3xy 13y2 16 Solución: Sustituyendo en la ecuación dada x x cos y sen y x sen y cos Se obtiene: 7 x cos y sen 2 6 3 x cos y sen x sen y cos 13 x sen y cos 2 (*) Desarrollando y reduciendo términos semejantes: 7 cos2 6 3sen cos 13sen2 x 2 12sen cos 6 3 cos2 2 7sen sen2 xy + 6 3sen cos 13 cos2 y2 16 Para eliminar el término en x'y', igualamos a cero el coeficiente de dicho término y despejamos 12sen cos 6 3 cos 2 sen2 0 2sen cos 3 cos 2 Recordar: sen2 sen2 0 2sen cos ALVITES CALIPUY MELBA ELIZABETH Página 6 16 cos2 sen2 cos 2 Luego tenemos: 2sen cos 3 cos 2 sen2 sen2 3 cos 2 0 Luego sen2 cos 2 Entonces 2 0 3 60º , de donde Sustituyendo este valor de 30º en (*), la ecuación se reduce a : x 2 2 4y 2 4, 2 x y 1 4 1 Que representa una elipse de centro en el origen y que tiene sus ejes sobre los nuevos. Los semiejes mayor y menor son, respectivamente, a = 2, b = 1. Ejemplo 8: Hallar las coordenadas del punto ( 1,3) cuando los ejes coordenados son trasladados primero al nuevo origen (4,5) y después se les gira un ángulo de 60º. Solución: - Coordenadas de los ejes originales x y y: P ( x, y) ( 1,3) . Entonces x 1 y y 3 - Cuando los ejes son trasladados al nuevo origen, las coordenadas son: h, k (4,5) x x h, x 1 4 5 Luego x Entonces: y y k y 3 5 2 5 y y 2 x x cos y sen x 5cos60º 2sen60º ALVITES CALIPUY MELBA ELIZABETH y y y cos x sen 2cos60º ( 5)sen60º Página 7 1 2 x 5 x 5 2 3 2 3 2 2 y 2 1 2 y 1 5 3 2 5 3 2 Ejemplo 9: Si y 2x es la ecuación después de una rotación de 53º, hallar su ecuación en el sistema XY. Solución: Se sabe que: x x cos y y cos ysen xsen Como 53º Entonces: x x cos53º ysen53º 3 4 x x y 5 5 Reemplazando: y 2x y 3 4 x 5 5 2 x 3 5 y y y y cos53º xsen53º 3 4 y x 5 5 4 5 3 y 4x 6x 8 y 0 10x 5 y 2x y ALVITES CALIPUY MELBA ELIZABETH Página 8 FORMA GENERAL La ecuación de segundo grado es: Ax 2 Bxy Cy 2 Dx Ey F 0 Para eliminar el término Bxy de la ecuación, el ángulo de giro se escoge de la siguiente manera: Si A= C, entonces 45º B tan 2 Si A C co t 2 A C , A C B 1 cos 2 1 cos 2 cos , 2 2 El ángulo de rotación queda restringido al intervalo 0º 90º , de manera que para 2 es 0º 2 180º tener en cuenta que: sen Ejemplo 10: Eliminar el término en xy de la ecuación 7 x2 Solución: Como A=7 , C=13, entonces: 6 3 6 3 B = tan 2 6 A C 7 13 tan 2 3 Entonces 2 60º , de donde 6 3xy 13y2 16 3 30º Luego sustituyendo en la ecuación dada con: x x cos y sen x cos30º y sen30º x 3 2 y 1 2 y x sen y cos x sen30º y cos30º 3x y 2 Luego reemplazando en 7 x2 x 3y 2 6 3xy 13y2 16 2 Tenemos: 7 3x y 2 Simplificando se tiene: 2 6 3 x2 4 y2 1 3x y 2 x 3y 2 13 x 3y 2 16 1 (Ver fig. del ejercicio 7) ALVITES CALIPUY MELBA ELIZABETH Página 9 SIMPLIFICACION COORDENADAS. DE ECUACIONES POR TRANSFORMACIÓN DE Acabamos de ver que, por una traslación o una rotación de 1os ejes coordenados, es posible transformar muchas ecuaciones en formas más simples. Es entonces 1ógico inferir que se puede efectuar una simplificación mayor aún aplicando ambas operaciones a la vez. Si una ecuación es transformada en una forma más simple por una traslación o una rotación de 1os ejes coordenados, o por ambas, el proceso se llama simplificación por transformación de coordenadas. Ejemplo 11: Representar la gráfica de 3 x2 2 xy 3 y2 2 x 10 y 9 0 a su forma más simple mediante una rotación de ejes y una traslación. Solución: Por rotación: Como A= C, entonces 45º . Las ecuaciones de la rotación son x y x y y x 2 2 2 Sustituyendo estos valores de x e y en la ecuación, 3 x 2 xy 3 y2 2 x 10 y 9 0 x y 2 Tenemos: 3 2 2 x y 2 x y 2 3 x y 2 2 2 x y 2 10 x y 2 9 0 4 x 2 8 y 2 12 2 x 8 2 y 18 0 De tal manera que se ha eliminado el término xy Por traslación: Para eliminar los términos de primer grado, completamos cuadrados: 4 x 2 8 y 2 12 2 x 8 2 y 18 0 4 x 2 12 2 x 8 y 2 8 2 y 18 0 4 x 2 3 2x 8 y2 2y 18 0 3 2 2 8 2 2 18 8 y 2 2 2 x 3 2 2 4 x 3 2 2 4 2 2 2 y 2 4 18 0 2 4 18 0 ALVITES CALIPUY MELBA ELIZABETH Página 10 2 4 x 3 2 2 x 3 2 2 2 2 2 8 y 2 4 2 2 2 y 1 1 2 1 Sean x x 3 2 , y 2 x2 Tenemos: 1 y2 1 2 y 2 2 1 CLASIFICACIÓN DE LAS CÓNICAS DE SEGUNDO GRADO La ecuación general de segundo grado Ax 2 Bxy Cy 2 Dx Ey F 0 , excepto en casos particulares, corresponde a una sección cónica. Se demuestra que si I B2 4 AC B2 4 AC < 0 , la curva es una elipse, B2 4 AC 0 , la curva es una parábola, B2 4 AC > 0 , la curva es una hipérbola. En los casos particulares, la ecuación representar (degeneración) dos rectas siempre que el primer miembro se pueda descomponer en el producto de dos factores lineales, un punto o rectas imaginarias. Teniendo en cuenta el valor de 4 ACF BDE AE 2 CD 2 FB2 1) Si 0 , entonces la ecuación Ax 2 Bxy Cy 2 Dx Ey F 0 a) I 0 , elipse b) I 0 , hipérbola c) I 0 , parábola 2) Si 0 a) I 0 , punto real o vacío b) I 0 , dos rectas concurrentes c) I 0 , dos rectas paralelas coincidentes o vacío. ALVITES CALIPUY MELBA ELIZABETH Página 11 Ejemplo 12: Hallar la naturaleza de la curva representada por la ecuación: 4 x2 4 xy y2 6 x 3 y 2 0 Solución: Dado que A=4 B=-4 C=1, tenemos B2 4 AC =0, puede ser una parábola. Agrupando términos, esta ecuación se puede descomponer en factores: 4 x2 4 xy y2 3 2 x y 2 0 2x y 2 3 2x y 2x y 1 2x y 2 2 0 0 Se trata de las rectas paralelas: 2x y 1 0 , 2x y 2 0 Ejemplo 13: Hallar la naturaleza de la curva representada por la ecuación: 3x2 4 3xy y2 15 Solución: Dado que A=3 B= 4 3 C=-1, tenemos B2 La cónica es una hipérbola. 4 AC =60>0 EJERCICIOS PROPUESTOS 1. En cada uno de los siguientes ejercicios transformar la ecuación dada trasladando los ejes coordenados al nuevo origen O . x2 y2 6 x 4 y 0; O ( 3, 2) a) 3 b) y2 6 x 9 0, O ,0 2 3x2 4 y2 12 x 8 y 4 0; O ( 2,1) c) d) xy 3x 4 y 13 0; O ( 4,3) 2. Aplicando las fórmulas de la traslación de ejes, x x h , y y k , reducir las ecuaciones siguientes a su forma más simple y establecer la naturaleza de la figura que representan. a) y 2 6 y 4 x 5 0 b) 3x2 4 y2 12 x 8 y 4 0 c) 2 x2 3 y2 4 x 12 y 20 0 d) y2 4 x 6 y 17 0 ALVITES CALIPUY MELBA ELIZABETH Página 12 3. Los ejes de coordenadas han girado un ángulo de 60º. Las coordenadas de los puntos A(2 3, 4) , B( 3,0) , C (0, 2 3) están determinadas en el nuevo sistema. Calcular las coordenadas de estos mismos puntos en el sistema de coordenadas primitivo. 4. Dadas las rectas 2x 3 y 6 0 y 4x 3 y 12 0 determine el nuevo origen donde se deben trasladar los ejes x e y de modo que las ecuaciones de las rectas dadas carezcan de términos libres. 5. Hallar las nuevas coordenadas del punto dado cuando los ejes rotan el ángulo dado 3, 4 ; 30º b) 3, 1 ; c) (1, 2); 180º 45º a) d) e) 2,3 2 ; 1, 0 ; 45º 90º 6. Cuáles son las coordenadas del punto cuando los ejes se giran el ángulo especificado y luego el origen se traslada al punto especificado. a) Punto P(3,6), ángulo 30º , O’(2, -6) b) Punto P(2,2), ángulo 45º , O’(-1,1) 7. Por traslación de los ejes coordenados el nuevo al nuevo origen O’(3,3) y después rotación en un ángulo de 30º las coordenadas de un cierto punto P se transforman en (7,6). Encuentre las coordenadas de P con respecto a los ejes originales. 8. Hallar la transformada de la ecuación dada, al girar los ejes de coordenadas un ángulo dado. a) 3 y2 3xy 1 0; 60º b) 2 x2 3xy y2 30º 3 c) 3x 4 y 10 0; sen ,cos 5 d) x2 2 xy y2 2 x 4 y 3 0; e) y 3x 3 ; 4; 4 5 45º 60º f) 11x2 24 xy 4 y2 30 x 40 y 45 0; sen 4 ,cos 5 3 5 9. Eliminar los términos de primer grado de las ecuaciones siguientes completando cuadrados perfectos. a) x2 2 y2 6 x 8 y 7 0 b) x2 y2 4 x 6 y 3 0 c) 3x 2 d) 2 x 2 4 y2 5y 2 6 x 8 y 10 12 x 10 y 17 0 0 ALVITES CALIPUY MELBA ELIZABETH Página 13 10. Considere una rotación 45º, para graficar xy 2 , indique sus elementos principales. 11. Por una rotación de 45º de los ejes coordenados, una ecuación de segundo grado se transforma en 2 x 2 4 y 2 8 . Hallar la ecuación original. 12. Por una rotación de ejes la ecuación A x 2 B y 2 x2 x 3 , se transforma en 1 . Hallar A B 13. Por una traslación de ejes, la ecuación x2 2 xy y2 2 x 2 y 1 0 se transformó en k y . Hallar k 14. Hallar la nueva ecuación de y 3x 3 , después de haber girado los ejes 60º. 15. Si y 2x es la ecuación después de una rotación de 53º, hallar su ecuación en el sistema XY. 16. Mediante una traslación de ejes coordenados, si es posible, reducir la ecuación: (4 x 6) a) y a la forma x y a , a es constante (2 x 1) b) xy2 2 y2 2 xy x 4 y 37 0 a la forma x y 2 a, 17. Por una rotación de 60º de los ejes coordenados, una ecuación de segundo grado se transforma en x 2 3 y 2 3 . Hallar la ecuación original. 18. Por una rotación de ejes, transformar la ecuación 3x 4 y 5 , en otra que no tenga término en y . 19. Mediante una traslación de ejes adecuado, transformar la ecuación: x2 xy y2 7 x 8 y 18 0 en otra que no tenga términos de primer grado. 20. Al efectuar una rotación, se obtiene un ángulo cuya medid es º , la pendiente de la recta L : x 3 y 6 0 en el nuevo sistema es infinita. Halle º y la ecuación en el nuevo sistema. 21. Por una traslación de coordenadas al nuevo origen (-2,3) seguido de una rotación de 2 2 y 4. 45º; la ecuación de una curva se ha reducido a la ecuación 4 x Hallar la ecuación original. 22. La nueva ecuación de una curva después de una rotación según un ángulo cuya medida de 37º es: 39( x ) 2 64( y ) 2 4 x y 100 0 . Hallar la ecuación original. 23. Por una rotación de ejes simplificar la ecuación 2 x2 la distancia de los focos). ALVITES CALIPUY MELBA ELIZABETH 3xy y2 4 (dar respuesta Página 14 24. Por medio de una rotación de ejes y una traslación, reduce las ecuaciones a su forma más simple, trazar los ejes coordenados. a) 9 x2 24 xy 16 y2 90 x 130 y 0 b) 8 x2 4 xy 5 y2 36 c) x2 4 3xy 3 y2 30 d) 3 x2 2 xy 3 y2 2 x 10 y 9 0 e) 9 x2 4 xy 6 y2 12 x 36 y 44 0 f) x2 10 xy y2 x y 1 0 25. Hallar la naturaleza de las cónicas siguientes teniendo en cuenta el valor de discriminante B2 4 AC . a) x2 2 xy 3 y2 2 x 22 y 35 0 4 b) 3 x2 18 xy 27 y2 5 y 7 y c) x2 2 xy 3 y2 2 x 22 y 35 0 d) x2 3xy y2 x 0 e) x2 2 xy y2 3x 3 y 2 0 f) 16 x2 24 xy 9 y2 30 x 40 y 0 ALVITES CALIPUY MELBA ELIZABETH Página 15