MÉTODOS
NUMÉRICOS
Segunda Edición
Francis Scheid
Rosa Elena Di Costanzo
MÉTODOS NUMÉRICOS
Segunda edición
www.elsolucionario.org
www.elsolucionario.org
www.elsolucionario.org
MÉTODOS NUMÉRICOS
FRANCIS SCHEID, Ph.lD.
Profesor Emérito de Matematica
Universidad de Boston
www.elsolucionario.org
free online eBooks and Solutions Manual
can be found at www.elsolucionario.org
Rosa llena Di Costanzo Loreces
Coautoría:
Ingeniero en Sistemas Computáciones
Maestría en Investigación de Operaciones
Profesora de Métodos Numéricos I T E S M
Traducción:
Gabriel Nagore Cazares
Facultad de Ciencias UNAM
Instituto de Investigaciones Eléctricas
Revisión técnica:
Glicina Merino Castro
Lic. en Matemáticas UAEM
Jefe del área de Matemáticas Aplicadas
Facultad de Ingeniería UAEM
Profesora del ITESM Campus Toluca
McGRAW-HILL
MEXICO • BOGOTA • BUENOS AIRES • CARACAS • GUATEMALA • LISBOA
MADRID •
NUEVA YORK • PANAMÁ • SAN JUAN • SANTIAGO • SAO PAULO
AUCKLAND • HAMBURGO • LONDRES • MILÁN • MONTREAL • NUEVA DELHI
PARÍS • SAN FRANCISCO • SINGAPUR • ST. LOUIS
SIDNEY • TOKIO • TORONTO
www.elsolucionario.org
Francis Scheid es profesor emérito de Matemáticas en la Universidad de Boston, ha
sido miembro de la facultad desde que recibió su Doctorado sobre MIT en 1948,
fungiendo como Jefe del departamento de 1956 a 1968. En 1961 -1962 fue profesor
emérito en la Universidad Rangoon en Burma. El profesor Scheid ha impartido varias
conferencias para educación por televisión, y sus videotapes son usados por la
Marina de los Estados Unidos de Norteamérica. Sus investigaciones están ahora
centradas en modelos de simulación por computadora sobre el golf. Entre sus
publicaciones están los libros de la serie Outline de Schaum, "Numerical Analysis",
"Computer Science" y "Computers and Programming".
MÉTODOS NUMÉRICOS
Prohibida la reproducción total o parcial de esta obra
por cualquier medio, sin autorización escrita del editor.
DERECHOS RESERVADOS © 1991, respecto a la segunda edición en español por
McGRAW-HILL INTERAMERICANA DE MÉXICO, S. A. de C. V.
Atlacornulco 499-501, Fracc. Ind. San Andrés Atoto,
535QQ Naucalpan de Juárez, Edo. de México
Miembro de la Cámara Nacional de la Industria Editorial, Reg. Núm. 1890
ISBN 968-422-790-6
(ISBN 968-451-100-0 primera edición)
Traducido de la segunda edición en inglés de
SCHAUM'S OUTLINE NUMERICAL ANALYSIS
Copyright © MCMLXXXVIII, by McGraw-Hill, Inc., U. S. A.
ISBN 0-07-055221-5
1234567890
Impreso en México
9087654321
Printed In México
Esta obra se terminó de
imprimir en febrero de 1991
en Programas Educativos, S.A. de C.V.
Calz, Chabacano 65-A
Col. Asturias
Deleg. Cuauhtémoc
06850 México, D.F.
Se tiraron 6000 ejemplares
www.elsolucionario.org
Rosa Elena Di Costanzo Lorencez es profesora de la División de Ingeniería y Ciencias en el Campus Toluca
del Instituto Tecnológico y de Estudios Superiores de Monterrey. Originaria de México, D. F., cursó sus estudios
de primaria y secundaria en el Colegio Motolinia de Tampico, Tamps. Es graduada de la Preparatoria en Ciencias Físico-Matemáticas, de la Carrera de Ingeniería en Sistemas Computacionales y de la Maestría en Investigación de Operaciones del ITESM, Campus Monterrey.
Es vocal en Educación Superior y Promoción Cultural de Toluca, A. C. (asociación que auspicia al Campus
Toluca del ITESM).
Tiene dieciséis años de experiencia docente en diversas instituciones profesionales y de postgrado, como el
Tecnológico Regional de Cd. Madero, Tamps., la Universidad Autónoma de Tamaulipas en Tampico, Tamps.
y el ITESM Campus Monterrey y Campus Toluca.
Ha dirigido grupos estudiantiles de trabajo en las áreas de Ingeniería Industrial y de Computación, en empresas
del Valle Toluca-Lerma, tales como FAMOSA Toluca, Cervecería Cuauhtémoc, S. A., Plásticos Vallejo, S. A.,
Vitrocrisa Toluca, Ladrillera La Huerta, S.A., CRYOINFRA Toluca, Resistol, Servicio Villegas, S. A., y cuatro
hospitales de Toluca.
Ha impartido diversos cursos en las mismas áreas como Análisis Numérico, Métodos Numéricos para
Ingeniería, Algoritmos Computacionales, Programación Lineal, Programación Fortran, Cobol, Basic, Análisis
y Diseño de Sistemas, Ciencias Computacionales, Programación Estructurada, Calidad y Productividad,
Sistemas de Información Computarizados, Administración de Centros de Cómputo e Ingeniería de Sistemas.
Ha colaborado en proyectos de desarrollo de planes y programas de estudio y de capacitación y adiestramiento
a nivel profesional, diplomados y de postgrado en las mismas instituciones y en el Sistema Estatal de
Informática del Gobierno del Estado de México.
Ha trabajado como analista y como jefa de proyectos en la Unidad de Informática Zona Norte de PEMEX, en
la Dirección General de Acreditación y Certificación de la Secretaría de Educación Pública, en el Grupo Sigma
y en el Sistema Estatal de Informática del Gobierno del Estado de México.
www.elsolucionario.org
www.elsolucionario.org
Contenido
Capítulo
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Pág.
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
POLINOMIOS DE COLOCACIÓN
DIFERENCIAS DIVIDIDAS FINITAS
POLINOMIOS FACTORIALES
SUMAS (SUMATORIAS)
EL POLINOMIO DE NEWTON
OPERADORES Y POLINOMIOS DE COLOCACIÓN
PUNTOS NO EQUIDISTANTES
INTERPOLACIÓN_POR_SEGMENTACIÓN_(SPLINES)
POLINOMIOS OSCULADORES
EL POLINOMIO DE TAYLOR
INTERPOLACIÓN
DIFERENCIACIÓN NUMÉRICA
INTEGRACIÓN NUMÉRICA
INTEGRACIÓN GAUSSIANA
CASOS ESPECIALES EN LA INTEGRACIÓN NUMÉRICA
SUMAS Y SERIES
ECUACIONES EN DIFERENCIAS
ECUACIONES DIFERENCIALES
SISTEMAS DE ECUACIONES DIFERENCIALES
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
APROXIMACIÓN POLINOMIAL POR MINIMAX
APROXIMACIÓN POR FUNCIONES RACIONALES
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
ÁLGEBRA NO LINEAL
SISTEMAS DE ECUACIONES LINEALES
PROGRAMACIÓN LINEAL
SOLUCIÓN DE SISTEMAS INCONSISTENTES
PROBLEMAS CON VALORES EN LA FRONTERA
MÉTODO DE MONTE CARLO
APÉNDICE. PROBLEMAS INTEGRADORES
RESPUESTAS A LOS PROBLEMAS SUPLEMENTARIOS
ÍNDICE
www.elsolucionario.org
1
33
43
54
67
75
85
104
118
131
140
152
172
187
211
241
250
278
296
343
356
403
427
445
475
529
611
630
640
671
685
693
705
www.elsolucionario.org
Prefacio
de la 2a edición en inglés
El objetivo principal del análisis numérico sigue siendo el mismo: encontrar soluciones aproximadas a problemas
complejos utilizando sólo las operaciones más simples de aritmética. En pocas palabras, se trata sencillamente de
resolver problemas difíciles mediante muchos pasos fáciles. Ello significa identificar los procedimientos por medio
de los cuales las computadoras pueden hacer ese trabajo por nosotros. Los problemas provienen de diversas
áreas de las matemáticas, sobre todo del álgebra y el análisis; en ocasiones los límites o fronteras entre ellas no
están bien definidos. Gran parte de la teoría básica la toma el analista de esas áreas, algunas de las cuales han
de incluirse en un libro introductorio para lograr mayor claridad. También es cierto que este libro no se ocupa sólo
de simples números en esas áreas. No olvidemos que el método numérico ha realizado notables aportaciones a la
teoría algebraica y analítica.
En esta segunda edición se han incorporado muchos temas nuevos. Entre otras cosas se incluye el análisis
de error regresivo, interpolación por segmentación (splines), la integración adaptativa, las transformadas rápidas
de Fourier, los elementos finitos, las ecuaciones diferenciales rígidas y el método QR. El capítulo dedicado a los
sistemas lineales ha sido reelaborado por completo. Se han abreviado o suprimido algunos temas más antiguos,
pero una parte considerable del análisis numérico clásico se ha conservado en parte por razones históricas. Muy a
mi pesar he tenido que hacer algunas de esas supresiones, en especial la de la prueba constructiva de la existencia de soluciones a las ecuaciones diferenciales. La nueva edición exige un poco más a los estudiantes, pero lo
mismo puede decirse de esta materia en general.
La presentación del libro y su finalidad no han cambiado. Se ha incluido suficiente material para un curso de
un año al inicio del nivel de postgrado. El libro puede adaptarse a un curso de un semestre si se efectúan las modificaciones (supresiones) necesarias. El formato de los problemas permite utilizarlos como un complemento de
otros libros y facilita el estudio independiente. Cada capítulo comienza con un resumen del contenido y ha de considerarse como su tabla de contenidos. No se pretende que el texto sea autoexplicatorio y por ello se ofrecen detalles de apoyo a lo largo de los problemas resueltos.
Y vuelvo a insistir en un aspecto sumamente importante: no cabe duda que el lector meticuloso encontrará
errores en el libro, a pesar de todos ios esfuerzos que hice por evitarlos. Los analistas numéricos son las personas
que más se preocupan por no cometer errores, posiblemente porque tienden mucho a hacerlos. Agradeceré a los
lectores si me comunican los errores que encuentren. (Realmente la respuesta a esta petición fue muy buena en
la primera edición.) Y sigo creyendo que en la vida uno de los mejores premios al esfuerzo humano es la alegría
que acompaña la búsqueda de la "verdad" tan elusiva.
FRANCIS SCHEID
www.elsolucionario.org
www.elsolucionario.org
Prefacio
de la edición adaptada
En esta adaptación al Español, se conservan todas las ventajas de la segunda edición en inglés, además de tener
adiciones importantes para emplear este libro a nivel de Licenciatura y de Postgrado, que considero atractivas tanto para alumnos como para maestros, ya que permiten el empleo del libro como texto.
Se ha dado un nuevo enfoque en cada capítulo, incluyendo teoría básica en donde se juzgó necesario, objetivos específicos de aprendizaje en cada uno de los treinta capítulos y algo muy importante fue la inclusión de algoritmos detallados de algunos métodos, sobre todo en los temas de Raíces de Ecuaciones, Ceros de Polinomios
y Solución de Sistemas de Ecuaciones Lineales.
La forma de presentar los objetivos específicos de aprendizaje, es empleando verbos de acción para darles
claridad, además de estar correlacionados con los problemas del capítulo correspondiente, lo que permitirá al
maestro definir al alumno el grado de profundidad con que se va a tratar cada tema, seleccionando los objetivos
requeridos, dependiendo del nivel del curso que se esté impartiendo.
Los algoritmos que se han incluido, están definidos paso a paso; en otros casos se incluyen diagramas de
flujo los que respetan una estructura que permite su programación en cualquier superlenguaje, ésta es una ventaja
adicional, ya que estas metodologías no obligan al usuario a emplear un superlenguaje determinado, sino a utilizar
el que conozca o el que juzgue más conveniente.
Asimismo se incluye un método relativamente nuevo, comparado con la eliminación gaussiana para resolver
Sistemas de Ecuaciones Lineales, éste es el Método de Montante, desarrollado por los ingenieros mexicanos Rene Mario Montante Pardo y Marco Antonio Méndez Cavazos en Universidad Autónoma de Nuevo León, en la ciudad de Monterrey, N. L
ROSA ELENA DI COSTANZO LORENCEZ
www.elsolucionario.org
www.elsolucionario.org
¿Qué son los
métodos numéricos?
1
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras por qué son útiles los métodos numéricos (Introducción, Problemas
1.1. Ejemplos 1.1,1.6).
2. Explicar con sus propias palabras las desventajas e inconvenientes de los métodos numéricos
(Introducción).
3. Definir con sus propias palabras lo que es una sucesión aritmética y una sucesión geométrica
(Introducción, Capítulo 5).
4. Definir con sus propias palabras lo que es una serie aritmética y una serie geométrica (Introducción,
Problemas 1.10,1.11, Capítulos 5 y 17).
5. Escribir buscando en los capítulos posteriores, las series de Taylor y Fourier (Capítulos 11,24).
6. Explicar con sus propias palabras lo que es una fórmula recursiva y su aplicación dentro de métodos
numéricos (Introducción).
7. Explicar con sus propias palabras lo que es recursividad simple y múltiple (Introducción).
8. Obtener matemáticamente una fórmula de recursión de una sucesión, dados los elementos iniciales
(Introducción).
9. Definir con sus propias palabras convergencia de una sucesión y convergencia de una serle
(Introducción, Problemas 1.9 a 1.11).
10. Definir con sus propias palabras lo que es exactitud y precisión (Introducción, Problemas 1.8,1.40,
1.42).
11. Definir con sus propias palabras lo que es un error inherente (Introducción, Problemas 1.26 a 1.30).
12. Definir con sus propias palabras dígitos significativos (Introducción, Problemas 1.40 a 1.44,1.46 a 1.49).
13. Definir con sus propias palabras error absoluto (Introducción, Problemas 1.3,1.12,1.23 a 1.25).
14. Definir con sus propias palabras error relativo (Introducción, Problemas 1.2,1.6,1.7).
15. Definir con sus propias palabras error de truncamiento (Introducción).
16. Definir con sus propias palabras error de redondeo (Introducción).
17. Definir con sus propias palabras error sistemático (forward) y error accidental (backward)
(Introducción, Problemas 1.26 a 1.30).
18. Definir con sus propias palabras overflow y underflow (Introducción, Problemas 1.19,1,20).
19. Representar y operar números normalizados en módulo binarlo y decimal (Introducción, Problemas
1.15 a 1.18,1.21,1.22).
www.elsolucionario.org
2
MÉTODOS NUMÉRICOS
20. Sumar sucesiones de números, identificando el error de redondeo y aplicar posteriormente diferentes
agrupaciones de ellos (Introducción, Problema 1).
21. Deducir las fórmulas de error relativo para las operaciones de suma, resta, multiplicación y
división de dos números X y Y, cada uno con error relativo (Introducción).
22. Obtener el error relativo que se cometerá al hacer una serie de operaciones ( + , - , * , / ) (Introducción).
23. Enumerar por lo menos cinco aplicaciones de los métodos numéricos (Introducción).
24. Dar una definición de algoritmo y sus características (Introducción).
25. Definir con sus propias palabras el significado de algoritmo estable (Problema 1.14).
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Métodos numéricos
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de
Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial de funciones trigonométricas
Manejo de funciones discretas
Diferencias divididas
Polinomios factoriales
Sumas (sumatorias)
Sumas y series
El polinomio de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equidistantes
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Integrales simples con puntos de singularidad
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial de funciones trigonométricas
www.elsolucionario.org
1
2
10
11
13
14
21
22
23
24
3
4
5
17
6
7
8
9
12
13
14
15
16
21
22
23
24
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
Manejo de ecuaciones
Ecuaciones en diferencias
Ecuaciones diferenciales
Sistemas de ecuaciones diferenciales
Álgebra no-lineal y optimización
Raíces de ecuaciones
Ceros de polinomios
Sistemas de ecuaciones lineales
Sistemas de ecuaciones lineales
Programación lineal
Sistemas con múltiples soluciones
Problemas con valores en la frontera
Métodos de Monte Cario (números aleatorios)
www.elsolucionario.org
3
18
19
20
25
25
26
27
28
29
30
4
MÉTODOS NUMÉRICOS
ALGORITMOS
El objetivo del análisis numérico es resolver problemas numéricos complejos utilizando sólo operaciones simples
de la aritmética, con el fin de desarrollar y evaluar métodos para calcular resultados numéricos a partir de los datos
proporcionados. Los métodos de cálculo se denominan algoritmos.
Nuestros esfuerzos se centrarán en la búsqueda de algoritmos. Para algunos problemas aún no se ha encontrado un algoritmo satisfactorio, mientras que para otros hay varios, por lo que deberemos elegir de entre ellos.
Son varias las razones para elegir un algoritmo en vez de otro; dos criterios evidentes son la rapidez y la precisión.
La rapidez es una ventaja evidente, aunque en el caso de problemas pequeños dicha ventaja se ve casi eliminada
por la capacidad de la computadora. En problemas de grande escala, la rapidez es aún un factor principal y un algoritmo lento tiene que rechazarse por impráctico. Así, siendo otros factores iguales, es seguro que el método más
rápido será el elegido.
Dado que una computadora está compuesta de dispositivos que realizan operaciones lógicas y aritméticas;
los procedimientos matemáticos deben simplificarse a tal grado que sean accesibles para procesarse en
una computadora. Éste es uno de los objetivos principales para el estudio de los métodos numéricos.
Los métodos que vamos a estudiar nos permitirán simplificar los procedimientos matemáticos de manera
que podamos auxiliarnos con una computadora o una calculadora, para obtener resultados; como ejemplos de los
procedimientos que al final del curso podremos desarrollar, se encuentran: cálculo de derivadas, integrales,
ecuaciones diferenciales, operaciones con matrices, interpolaciones, ajuste de curvas, regresión lineal y
polinomial, raíces de ecuaciones de segundo grado y ceros de polinomios.
Las aplicaciones de los métodos numéricos son prácticamente ilimitadas y se requieren conocimientos de la
materia en disciplinas tan variadas como: economía, contabilidad, mercadotecnia, física e ingenierías industrial, civil, eléctrica, mecánica, química, etc. Asimismo, propicia la formación de criterios de decisión para la elección
del método adecuado, dependiendo del equipo computacional con el que nos estemos auxiliando, pudiendo ser
éste desde una gran computadora hasta una calculadora de bolsillo (programable o no), pasando por equipos
orientados hacia uno o más usuarios, ya que el comportamiento de los procesos diferirá mucho dependiendo del equipo.
DEFINICIÓN DE ALGORITMO:
El procedimiento matemático general que vamos a aplicar a los problemas que se nos presentan se llama algoritmo, voz de origen árabe que significa procedimiento matemático para la solución de un problema.
ALGORITMO: procedimiento matemático que nos indica la serie de pasos y decisiones que vamos a tomar para la
solución de un problema.
CARACTERÍSTICAS DE UN ALGORITMO:
1.
FINITO: siempre debe terminar en un número determinado de pasos.
2. DEFINIDO: las acciones deben definirse sin ambigüedad.
3.
ENTRADA: puede tener una o varias entradas.
4.
SALIDA: debe tener una o más salidas.
5.
EFECTIVIDAD: todas las operaciones deben ser lo suficientemente básicas para que puedan hacerse exactamente en un determinado tiempo, no mayor que el que tome una persona empleando lápiz y papel.
EJEMPLO 1.1
Encuentre la raíz cuadrada de 2 hasta cuatro decimales.
Existe más de un algoritmo con ios que sólo se usan las cuatro operaciones básicas de la aritmética. El favorito es sin duda
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
1
2 xn
x1= 1
5
2
xn
del cual unos cuantos cálculos mentales producen rápidamente
3
x2 = 2
17
x3 = 12
1 17 24
x4 = 2 12 17
o, redondeando hasta cuatro decimales,
x2= 1.5000
x3
= 1.4167
x4=
1.4142
siendo correcto el último resultado con cuatro decimales. Este algoritmo numérico tiene una larga historia y se en­
contrará de nuevo en el capítulo 25 como un caso especial del problema de determinar raices de ecuaciones.
RECURRENCIA O RECURSIVIDAD
FÓRMULA RECURSIVA: relaciona términos sucesivos de una sucesión particular de números, funciones o poli­
nomios, para proporcionar medios para calcular cantidades sucesivas en términos de las anteriores.
FÓRMULA RECURSIVA SIMPLE:
Por ejemplo, encuentre
S= la suma de un conjunto de n números reales (a1 a2, a3
an).
Fórmula inicial S1 = a1, para k - 1
Fórmula recursiva Sk = 5k-1 + ak,para k = 2, 3,...,n.
S1 = a1
S2 = a1 + a2 = S1 + a2
S} = a1 + a2 + a3
= S2 + a3
Sk =a1 + a2 + ... +ak = Sk-1 + ak
S„ = a1 + a2 + ... +an = Sn-1 + an
Desarrolle un diagrama de flujo completo.
FÓRMULA RECURSIVA MÚLTIPLE:
Por ejemplo, encuentre la sucesión de números de Fibonacci, 0,1,1, 2, 3, 5, 8,13, 21,...
En este caso la fórmula recursiva está en función de más de una variable anterior
Fórmula inicial
t1
=0
t2 = l
Fórmula recursiva tk+2+ tk+1+ tk para k = 1,2,...
Desarrolle un diagrama de flujo completo.
SUCESIÓN
DEFINICIÓN FORMAL DE SUCESIÓN:
Sucesión es una función f definida en el conjunto de Z+ Si f (n) - xn para n Z+ se acostumbra representar la su­
cesión f por el símbolo {Xn} o a veces por x1 x2, x 3 ,...
www.elsolucionario.org
6
MÉTODOS NUMÉRICOS
Los valores de f, esto es, los elementos de x„ se llaman términos de la sucesión.
Si A es un conjunto y xn A
se dice que { xn } es una sucesión en A o una sucesión de elementos de A.
La definición de sucesión involucra tres aspectos:
1) Un conjunto de índices, el conjunto de Z+
2) Un conjunto de valores M, M 0.
3) Una función de N en M, tal que para cada n
N le corresponde un elemento definido de M denotado por an.
Una sucesión no es simplemente un subconjunto, es un subconjunto numerado (indexado).
Si los elementos de M son números, se habla de una sucesión numérica; si los elementos de M son funcio­
nes, tenemos una sucesión de funciones, etc.
En una manera menos formal, es una colección ordenada de términos {tO, t1, t2............tk,.....} y se denota
por {tk}. Si el rango de k es finito, la sucesión es finita, de lo contrario es infinita. Se considera recursiva si sus tér­
minos satisfacen alguna relación de recursividad.
SUCESIÓN ARITMÉ TICA
Por ejemplo {1, 3, 5, 7,. .. } o {2, 4. 6. 8 , . . . }
t0 = a
t1= a + h
h = (a + h) + h
t k =[a + ( k - l ) h ] + h
tn = [a + (n - 1) h] + h
Fórmula inicial tO-a
Fórmula recursiva tk=tk-1+ h para k = 1 , 2 , . . . , n
= t0 + h
= t1 + h
= tk-1 + h
= tn-1 + h
Desarrolle un diagrama de flujo completo.
SUCESIÓN GEOMÉTRICA
Por ejemplo generar las sumas pardales de la sucesión geométrica a, ar, ar2, ar3
t0 = a
t1 - ar
t2 = (ar)r
t3 - [(ar)r]r
tk = [ar(k-1)r]
tn= [ar(n-1)r]
ark,.... arn.
Fórmula inicial t0 = a
Fórmula recursiva tk = tk-1r para k- 1,2, ...,n
-t1r
= t2r Fórmula inicial S0 = t0
Fórmula recursiva Sk = Sk-1 + tk
= tk - 1r
= tn-1r
Desarrolle un diagrama de flujo completo.
SERIE:
S=
es la serie infinita correspondiente a la sucesión infinita (t0, t1,t2, ..........., tk, ...) = { tk }.
Sk = tj es la k-ésima suma parcial de la serie infinita S.
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
7
La sucesión [Sk] de sumas parciales de la serie infinita S, es la sucesión (S0, S1 S2, ...) = { Sk }.
La serie converge si la sucesión converge.
La serie no converge si la sucesión no converge.
SERIE DE TAYLOR:
SERIE DE FOURIER:
f ( X ) = A 0 + A1 cos X + B1 sen X+ ... + An cos nX + Bn sen nX + ...
ERROR
En los cálculos numéricos el optimista pregunta qué tan precisos son los resultados calculados; el pesimista pre­
gunta qué tanto error se ha introducido. Desde luego, las dos preguntas corresponden a lo mismo. Sólo en raras
ocasiones los datos proporcionados serán exactos, puesto que suelen originarse en procesos de medida. De mo­
do que hay un error probable en la información de entrada. Además, el propio algoritmo introduce error, quizá redondeos inevitables. La información de salida contendrá entonces error generado por ambas fuentes.
EXACTITUD:
senta.
se refiere a la cercanía de un número o de una medida al valor verdadero que se supone repre­
PRECISIÓN: se refiere al número de cifras significativas que representan una cantidad, a esto se refiere cuando
se habla de doble precisión, dependiendo de la máquina que estemos utilizando.
DÍGITOS SIGNIFICATIVOS: son aquellos números diferentes de cero, en una cifra o guarismo, leyendo de iz­
quierda a derecha; empiezan con el primer dígito diferente de cero y terminan con el tamaño que permitan las cel­
das que guardan la mantisa.
ERRORES INHERENTES O HEREDADOS: son errores en los valores numéricos con que se va a operar, pue­
den deberse a dos causas: sistemáticos o accidentales.
ERRORES SISTEMÁTICOS: debidos a la imprecisión de los aparatos de medición.
ERRORES ACCIDENTALES:
debidos a la apreciación del observador y otras causas.
ERROR DE TRUNCAMIENTO: se debe a la interrupción de un proceso matemático antes de su terminación.
Sucede cuando se toman sólo algunos términos de una serie infinita o cuando se toma sólo un número finito de in­
tervalos. Un caso adicional de error de truncamiento ocurre cuando una calculadora poco sofisticada sólo toma en
cuenta los dígitos que caben en la pantalla y no analiza el primer dígito perdido.
www.elsolucionario.org
8
MÉTODOS NUMÉRICOS
ERROR DE REDONDEO: debido a las limitaciones propias de la máquina para representar cantidades que requieren un gran número de dígitos.
ERROR DE REDONDEO INFERIOR: se desprecian los dígitos que no pueden conservarse dentro de la localización de memoria correspondiente (pensando de una manera estricta, este caso puede considerarse como un error
de truncamiento).
ERROR DE REDONDEO SUPERIOR:
este caso tiene dos alternativas, según el signo del número en particular:
a)
Para números positivos, el último dígito que puede conservarse en la localización de memoria se
incrementa en una unidad si el primer dígito despreciado es > 5.
b)
Para números negativos, el último dígito que puede conservarse en la localización de memoria se reduce
en una unidad si el primer dígito despreciado es > 5.
ERROR ABSOLUTO: es la diferencia entre el valor de un número y su valor aproximado y - valor real, y* - valor aproximado, e, - error absoluto.
ey = | y - y*|
ERROR RELATIVO:
es el cociente del error absoluto entre el valor real.
ry = ey / y = |(y - y*)| /y para todo y ≠ 0.
OVERFLOW: en el lenguaje técnico de computación se acostumbra emplear este anglicismo, ya que las traducciones posibles no proporcionan una idea clara de su significado; con todo, en la presente obra se usará con fines
prácticos el término "sobreflujo". Se dice que existe overflow o sobreflujo cuando dentro de una localización de almacenamiento no cabe un número, debido a que éste es mayor que la capacidad de la mencionada localización
de almacenamiento.
UNDERFLOW: en el lenguaje técnico de computación se acostumbra emplear este anglicismo, ya que las traducciones posibles no proporcionan una ¡dea clara de su significado; con todo, en la presente obra se usará con fines prácticos el término "subflujo". Se dice que existe underflow o subflujo cuando dentro de una localización de
almacenamiento no se puede representar un número positivo muy pequeño, debido a que éste es menor que la
capacidad de la mencionada localización de almacenamiento.
EJEMPLO 1.2 Suponga que el número .1492 es correcto en los cuatro decimales dados. En otras palabras, es
una aproximación de un valor verdadero que se encuentra en el intervalo entre .14915 y .14925. Consecuentemente, el error es a lo sumo de cinco unidades en el quinto decimal, o la mitad de una unidad en el cuarto. En tal
caso se dice que la aproximación tiene cuatro dígitos significativos. De modo similar, 14.92 tiene dos lugares decimales correctos y cuatro dígitos significativos siempre que su error no exceda .005.
EJEMPLO 1.3 Se dice que el número .10664 se redondea hasta cuatro decimales cuando se escribe como
.1066, en tanto que .10666 se redondearía a .1067. En ambos casos el error que se produce al aproximar no es
mayor que .00005, suponiendo que las cifras dadas son correctas. El primero es un ejemplo de redondeo hacia
abajo y el segundo, de redondeo hacia arriba. Un caso intermedio tal como .10665 suele redondearse hasta el dígito par más cercano, para este número, .1066. Esto se hace para evitar la parcialidad excesiva entre los redondeos anteriores.
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
9
EJEMPLO 1.4 Cuando 1.492 se multiplica por 1.066, el producto es 1.590472. Las computadoras trabajan de
acuerdo con un "largo de palabra" establecido, cortando todos los números según ese largo. Suponiendo una má­
quina ficticia de cuatro dígitos, el producto anterior se redondearía a 1.690. Tales errores de redondeo son errores
de algoritmo y se hacen inevitablemente por millones en la computación moderna.
TEORÍA DE APOYO
A pesar de que nuestra perspectiva del análisis numérico está orientada a las aplicaciones, estaremos inte­
resados en la teoría de apoyo, que se emplea tanto para descubrir algoritmos como para establecer su validez. A
menudo, la teoría hacia la cual nos dejamos conducir tiene interés intrínseco, se trata de matemáticas atractivas.
Tenemos, por consiguiente, el mejor de ambos mundos, pero no debemos olvidar que nuestro interés es más fun­
cional que estético.
EJEMPLO 1.5 El cálculo de los valores de las funciones trigonométricas, exponenciales, así como de otras fun­
ciones no elementales depende claramente de la teoría de apoyo. Para obtener el coseno de x para valores pe­
queños de x, la serie clásica sigue siendo una buena elección.
cos x = 1
x2
x4
xb
2!
4!
6!
Con x - .5 esto se convierte en
cos .5 = 1 - . 125 + .0026041 - .0000217 + • • •
= .877582
resultado que tendrá más exactitud entre más términos tomemos de la serie. El límite de error en este ejemplo es­
tá garantizado por la teoría matemática de apoyo, que establece que para series como ésta el error no es mayor
que el primer término omitido (véase el problema 1.9). Aquí el primer término omitido es x8/8!, que para x = . 5 as­
ciende a un poco menos que .0000001.
REPRESENTACIONES NUMÉRICAS
Puesto que los objetivos fundamentales son numéricos, conviene hablar brevemente de la representación de
los números. La entrada numérica será por lo general en forma decimal, ya que estamos más familiarizados con
ella. Sin embargo, como casi todos saben, las computadoras encuentran por lo regular más conveniente las representaciones binarias, al corresponder su 0 y su 1 con el apagado y encendido o con los estados alto y bajo de los
componentes eléctricos. Para enteros positivos, la forma binaria es
dn 2n+ dn-1 2n-1+ . . . + d121 + d020
en tanto que para los números positivos menores que uno es
d -1 2 -1
+ d - 2 2 - 2 + d -3 2 -3 +...
con todos los dígitos binarios d1 ya sea 0 o 1. Tales representaciones son únicas.
Las representaciones de punto flotante tienen una ventaja adicional. En esta forma, tres partes describen el
número: un signo, una mantisa y un exponente (también con signo propio). Tomando los decimales como primer
ejemplo, el número .1492 aparecería como
www.elsolucionario.org
10
MÉTODOS NUMÉRICOS
+ .1492 10°
siendo + el signo, .1492 la mantisa y 0 el exponente. También puede considerarse la alternativa +1.492 10-1, entre
otras posibilidades, pero la práctica estándar exige que el primer dígito (diferente de cero) venga justo después del
punto. El exponente entonces determina el orden de magnitud. Dichas representaciones se llaman normalizadas.
De tal modo, 1492 se expresaría como +.1492 104.
NÚMEROS DE PUNTO FLOTANTE
Se llaman así, a diferencia de los números enteros, porque tienen decimales y en consecuencia tienen punto decimal.
Su representación es
Ni = aibei para i = 1,2,...
donde ai = coeficiente; b = base del sistema numérico; ei = exponente. Ejemplo: 245.3 = .2453(10)'
OPERACIONES DE SUMA, RESTA, MULTIPLICACIÓN Y DIVISIÓN CON NÚMEROS DE PUNTO FLOTANTE:
NÚMEROS NORMALIZADOS:
Se llama de esta manera a aquellos números de punto flotante que se expresan de la forma siguiente:
Sea a una fracción F, tal que (1/b)
\F | < 1, donde F es la mantisa.
REPRESENTACIÓN INTERNA DE UN NÚMERO NORMALIZADO:
signo
Únicamente cuando las
cantidades sean negativas,
tanto en mantisa como en
exponente, llevarán signo
negativo.
Punto decimal hipotético
Celdas para la mantisa normalizada
Celdas para el exponente
EJEMPLOS DE NÚMEROS NORMALIZADOS A OCHO DÍGITOS SIGNIFICATIVOS:
.0001627
7392842.0
-.034287654
8279314836.25
8279314835.0
-32.461
.16270000
.73928420
-.34287654
.82793148
.82793148
-.32461000
10-3
10-7
10-1
1010
1010
102
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
OPERACIONES ARITMÉTICAS CON NÚMEROS NORMALIZADOS DE PUNTO FLOTANTE:
X = Fx -10ez => .1≤|F x |<1
Y = Fy -10ez => . l ≤ | F y | < l
.1 ≤ |Fz |< 1
m - dígitos significativos
SUMA Y RESTA:
Z = X ± Y = [(Fx10ex) ± (Fx10ey)]
Z = X ± Y = [Fx ± (Fy10ey-ez )] 10ex
Sean ex > ey, de no ser así: X −> Y, Y −> X, F^y = Fy10ey-ex
Recordemos que F x 10 ex ± F y 10 ey 10 ex 10 ey
a) Si |F x ±F y | < . 1 , F y = 10 m (F x ± F^ y ), e z = e x-m
b) Si .1 < |Fx ± F^y | < .1,F z = FX± F^y, ez = ex
c) Si |Fx ± F^y | >1, Fz - {Fx ± F^y /10},ez =ex+ 1
MULTIPLICACIÓN:
a) Si |FxFy|< .1 => Fz = 10 FxFy, ez = ex + ey - 1
6)
Si .1 < |FxFy| < 1 => Fz = F x F y , e2 = ex + ey
DIVISIÓN:
a) Si.l ≤ |Fx / Fy| < 1,Fz = | Fx / Fy,|, ez = ex-ey
b) Si |Fx / Fy| > 1,Fz = | Fx / 10Fy,|,ez = ex-ey+l
ERRORES DE REDONDEO EN OPERACIONES ARITMÉTICAS DE PUNTO FLOTANTE:
d = número de dígitos; Ez - error en el valor redondeado de z; f - dígitos que no caben en la palabra de memoria
Si |f| < .5 => |Z| - |F |. 10ez => |Ex|=|f| .10ez-d
www.elsolucionario.org
11
MÉTODOS NUMÉRICOS
Si |f| ≥ .5 =>|Z| = |F | × 10ez + 10ez-d => |E2| = |1 - f| 10ez-d
FÓRMULAS DE ERROR ABSOLUTO:x,y- reales;
- aproximados
SUMA:
ex + ey
RESTA:
ex + ey
MULTIPLICACIÓN:
se ignora
DIVISIÓN:
suponemos
RESUMIENDO Y PONIENDO ERROR DE REDONDEO:
FÓRMULAS DE ERROR RELATIVO:
www.elsolucionario.org
¿QUE SON LOS MÉTODOS NUMÉRICOS?
13
SUMA:
RECOMENDACIONES PRÁCTICAS PARA LOGRAR MAYOR PRECISIÓN:
1. Cuando se van a sumar y/o restar números, trabajar siempre con los números más pequeños primero.
2.
Evitar siempre que sea posible la resta de números aproximadamente iguales, reescribiendo la resta.
3.
Ejemplos: a(b - c) - ab - ac; (a - b)/c - a¡c — b l c (en caso de que a sea aproximadamente igual a b,
efectuar primero la resta de b - c).
4.
Cuando sea posible que algún denominador se haga cero, preguntar en el programa, antes de efectuar
la operación.
5.
Cuando se desea sumar y/o restar una gran cantidad de números, es conveniente asociarlos en n
grupos de aproximadamente n elementos.
6.
Cuando no se aplica ninguna de las reglas anteriores, minimizar el número de operaciones aritméticas.
EJEMPLO 1.6 Convierta el decimal 13.75 en una forma binaria de punto flotante.
Existen métodos de conversión más formales, pero incluso sin ellos puede verse fácilmente que el binario
equivalente de 13.75 es 1101.11, con 8 + 4 + 1 a la izquierda del punto y ½ + ¼ a la derecha. Ahora reescribimos
esto como
+.110111(+100)
donde el +100 entre paréntesis sirve como exponente 4. Una conversión final es
01101110100
en la que la aparición sólo de ceros y unos es atractiva para fines eléctricos, siempre y cuando se entiendan ciertas convenciones. El primer cero se interpreta como un signo más. (1 significaría menos.) Seis dígitos binarios o
bits forman entonces la mantisa, asumiéndose un punto binario en su primer dígito. El cero que sigue es otro signo
más, esta vez para el exponente, el cual concluye la representación. La forma final no se parece mucho a 13.75,
pero es comprensible. En la práctica, tanto la mantisa como el exponente incluirían más dígitos y las formas del
signo y el exponente variarán, pero las representaciones de punto flotante constituyen una herramienta básica de
la computación moderna.
NORMAS DE VECTORES Y MATRICES
La longitud euclidiana de un vector, esto es,
para el vector V con componentes v¡, se denomina también la norma de V y se le asigna el símbolo ||V ||. Tres
propiedades básicas de esta norma son
www.elsolucionario.org
MÉTODOS NUMÉRICOS
1. || V|| ≥ 0, y equivale a 0 si y sólo si V = 0
2. ||cV|| = c • || V || para cualquier número c
3. ||V + W|| ≤ ||V|| + ||W||
La última se conoce como la desigualdad del triángulo.
Varias funciones reales más tienen también estas propiedades y se llaman también normas. De interés particular son las normas Lp.
para p > 1. Con p - 1, se trata de la norma L1, la suma de las magnitudes componentes. Con p = 2, se tiene la familiar longitud vectorial o norma euclidiana. Cuando p tiende al infinito, prevalece el vi dominante y tenemos la norma máxima
En más de una ocasión, encontraremos usos para estas normas, en particular en el estudio del comportamiento
del error de algoritmos.
EJEMPLO 1.7 Empleando la norma L1, los vectores (1, 0) (½, ½) (0, 1), entre otros, tienen norma 1. En la figura 1.1a se presenta un esquema de tales vectores unitarios, partiendo todos del origen. Sus puntos terminales forman un cuadrado. La figura 1.16 muestra los vectores unitarios más familiares de la norma euclidiana. Utilizando
la norma Lo», los vectores (1, 0) (1,1) (0,1), entre otros, tienen norma uno. Su gráfica se asemeja a la de la figura 1.1c, formando también un cuadrado los puntos terminales.
a)
b)
Figura 1.1
Al considerar matrices, definimos
||A|| = máx ||AV||
www.elsolucionario.org
c)
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
15
tomándose el máximo sobre todos los vectores unitarios V. El significado de unitario en este caso depende del tipo de norma vectorial que se esté usando. Tales normas de matriz tienen propiedades paralelas a las listadas antes para vectores.
1. || A || ≥ 0, y equivale a cero si y sólo si A = 0
2. ||cA|| =c • ||A|| para cualquier número c
3. ||A + B|| ≤ ||A|| + ||B||
Además, para las matrices A y B y el vector V, las propiedades
4.
||AV|| ≤ ||A||•||V||
5.
||AB||
≤
||A||•||B||
serán útiles. Las normas L1 y L∞ tienen la ventaja de ser fáciles de calcular, siendo la primera el máximo de la suma de columna absoluta
y la segunda, la suma de renglón absoluta de A
Muchas de estas características se demostrarán en los problemas resueltos.
EJEMPLO 1.8
Encuentre las normas L1, L2 y L∞ de la matriz:
Las sumas máximas absolutas de columnas y renglón se encuentran de inmediato, y rápidamente determinamos que
L1 = L∞ = 2
Desafortunadamente no hay una teoría de apoyo correspondiente que ayude a L2 y esta matriz en apariencia tan
sencilla no da tal valor sin algunos problemas. Por definición, la norma L2 de A es la norma máxima L2 del vector
para x2 + y2 = 1, esto es, para (x, y) en el círculo unitario de la figura 1.1b. El cuadrado de esta norma es
(x + y)2 + x2 = 1 + 2xy + x2 = 1 + 2x 1 - x 2 + x2
www.elsolucionario.org
16
MÉTODOS NUMÉRICOS
que puede maximizarse mediante cálculo elemental. La suposición de que y es positiva no es restrictiva aquí
puesto que la norma toma el mismo valor para (x, y) y (-x, -y). A la larga se encuentra que ocurre un máximo para
y que
Problemas resueltos
1.1
Calcule el valor del polinomio
p(x) = 2x3 - 3x2 + 5x - 4
para el argumento x - 3.
Siguiendo el curso natural, encontramos x2 = 9, x3 = 27, y uniendo las partes
p(3) = 54 - 27 + 15 - 4 = 38
Al contar se descubre que se efectuaron cinco multiplicaciones, una suma y dos restas.
Volviendo a acomodar el polinomio, ahora en la forma
p(x) = [(2x-3)x + 5] x - 4
se realiza otra vez el procedimiento. De x = 3 tenemos en forma sucesiva 6, 3, 9, 14, 42 y 38. Esta vez sólo
se hicieron tres multiplicaciones, en lugar de cinco. La reducción no es considerable, pero sí sugestiva.
Para un polinomio general de grado n, el primer algoritmo requiere 2n - 1 multiplicaciones, y el segundo
sólo n. En una operación más larga, que incluya muchas evaluaciones de polinomios, puede ser significativo el ahorro de tiempo y de errores de algoritmo (redondeo).
1.2
Defina el error de una aproximación.
La definición tradicional es
Valor verdadero = aproximación + error
de modo que, para el ejemplo,
√2
= 1.414214 + error
π = 3.1415926536 + error
1.3
¿Cuál es el error relativo?
Éste es el error medido relativo al valor verdadero.
Error relativo =
error
valor verdadero
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
17
En el caso común de que el valor verdadero se desconozca o sea difícil de manejar, la aproximación se
sustituye por él y el resultado sigue llamándose, un poco libremente, error relativo. De tal manera la
aproximación familiar de 1.414 para √2 tiene un error relativo de alrededor de
.0002
1.414
.00014
en tanto que la aproximación menos exacta de 1.41 tiene un error relativo cercano a .003.
Puesto que xi - E ≤ Xi ≤ xi + E
sumando se deduce que
∑
x1
por lo que
-
nE ≤ ∑X1 ≤ ∑x1 + nE
- nE ≤ ∑X1 - ∑x1 ≤ nE
que es lo que se quería demostrar.
1.5
Calcule la suma
+
... +
con todas las raíces evaluadas hasta dos lugares decimales. De
acuerdo con el problema anterior, ¿cuál es el máximo error posible?
Ya sea mediante unas cuantas líneas de programación bien elegidas o por medio de la anticuada
consulta de tablas, las raíces en cuestión pueden encontrarse y sumarse. El resultado es 671.38. Como ca­
da raíz tiene un error máximo de E =.005, el error máximo posible en la suma es nE = 100(.005) = .5, lo
que sugiere que la suma en la forma que se determina no puede ser correcta ni siquiera hasta un lugar de­
cimal.
6
¿Qué se entiende por el error probable de un resultado calculado?
Ésta es una estimación de error tal que el error real excederá al estimado con una probabilidad de un
medio. En otras palabras, es igualmente probable que el error real sea más grande o más pequeño que el
estimado. Puesto que esto depende de la distribución del error, no es fácil de determinar, por lo que un sus­
en donde E es el máximo error posible.
tituto menos aproximado se utiliza a menudo,
7
¿Cuál es el error real del resultado en el problema 1.5 y cómo se compara con los errores máximo y pro­
bable?
Un nuevo cálculo, con raíces cuadradas determinadas hasta cinco lugares decimales, produce la su­
ma 671.46288. Esta vez el error máximo es 100(.000005) que corresponde a .0005, de modo que la suma
es correcta hasta tres lugares como 671.463. El error real del primer resultado es consecuentemente cerca­
no a .08, comparado con el máximo .50 y el probable .05. Una de nuestras estimaciones fue demasiado pe­
simista y la otra ligeramente optimista.
8
Suponga que se sumarán mil raíces cuadradas, en vez de sólo cien. Si se quiere una precisión de hasta
tres lugares, ¿con qué exactitud deben calcularse las raíces individuales?
Para tener una garantía sólida conviene suponer el caso más extremo en el que podría llegarse al
máximo error posible. La fórmula nE del (gobierna 1.4 se convierte en 1000E, mostrando que pueden per­
derse tres lugares decimales en una suma de este largo. Puesto que se quiere un resultado con una exacti-
www.elsolucionario.org
18
MÉTODOS NUMÉRICOS
tud de hasta tres lugares, puede ser sensato tener seis lugares correctos en la entrada. La cuestión es que
en cómputos muy largos hay tiempo para que errores muy pequeños hagan una contribución colectiva considerable.
1.9
Calcule la serie
1
1 1 1
2
3
4
corrija hasta tres dígitos.
Esta serie ilustra un teorema de análisis frecuentemente utilizado. Puesto que entre sus términos se
alterna el signo y éstos disminuyen de manera estable, las sumas parciales se alternan a ambos lados del
límite (el valor de la serie). Esto implica que el error en cualquier punto será menor que el primer término
omitido. Para lograr la exactitud especificada, necesitamos entonces 1 / n ≤ .0005 o n ≥ 2000. Tienen que sumarse dos mil términos. Trabajando con ocho lugares decimales, los 2000 redondeos pueden acumularse
nE = 2000(.000000005) = .00001
que puede llegar a ser de poca consideración, lo que permite continuar el cómputo, redondear el resultado
hasta tres lugares y obtener .693.
Note que en este problema no tenemos error de entrada, sólo errores de algoritmo. Primero, únicamente tomamos una suma parcial en lugar de la serie, y después hacemos numerosos errores de redondeo
al tratar de evaluar dicha suma. El primero se llama error de truncamiento y parece ser el mayor en las dos
fuentes de error en este problema. En resumen,
Error real = error de truncamiento + error de redondeo
= .0005 +.00001
aproximadamente. De hecho, el valor de la serie es el logaritmo natural de 2, y hasta tres lugares corresponden a nuestro valor de .693.
1.10
Demuestre que si la serie
a1- a2 + a3 - a4 + . . .
es convergente, siendo todos los ai positivos, entonces
½ a1 +½ (a1 -a2) - ½ (a2 - a3) +½ (a3 -a4)+ . . .
es también convergente y representa el mismo número.
Con An y Bn representando las sumas enésimas parciales de las dos series, es fácil ver que An - Bn =
± ½ an. Como la primera serie es convergente, el límite de an es cero y concluye la demostración.
1.11
Aplique el teorema del problema anterior para evaluar la serie del problema 1.9, también hasta tres decimales.
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
19
Con un poco de álgebra se encuentra que B = ½, y para n > 1.
Ésta es nuevamente una serie alternante con términos monótonos, así que podemos recurrir al teorema del
problema 1.9. Para una exactitud de tres dígitos necesitamos
1
≤ .0005
2n(n +1)
o n ≥ 32. Se trata de muchos menos términos que los que se necesitaron antes y el redondeo será difícilmente un producto de una máquina de ocho dígitos. El nuevo algoritmo es mucho más rápido que el anterior y maneja el mismo .693 con menor esfuerzo.
1.12
Dado que los números .1492 y .1493 son correctos a medida que se avanza, esto es, los errores no son
más grandes que cinco unidades en el quinto lugar, ilustre el desarrollo del error relativo considerando el
cociente 1/(.1498 - .1402).
Para los números dados, los errores relativos son aproximadamente iguales a 5/15 000, que es cercano a 1.03%. En el caso de la suma, esto conduce también a un error relativo próximo al .03%, pero
con la diferencia de .0006 encontramos un error de una parte en seis, lo cual es el 17%. Volviendo al cociente requerido, puede ser conveniente considerar la posición pesimista. En la forma dada, se calcularía el
cociente de 1667, hasta el entero más cercano. Pero es concebible que el que debe determinarse en lugar
del anterior es 1/(.14985 - .14915), lo cual nos llevaría a 1429. En el otro extremo está 1/(.14975 .14925) = 2000. Este simple ejemplo aclara que un gran error relativo generado en alguna etapa anterior de
un cálculo continuo puede conducir a errores absolutos más grandes en los pasos posteriores del procedimiento.
1.13
¿Qué se entiende por la condición de un problema numérico?
Un problema está bien condicionado si cambios pequeños en la información de entrada ocasionan
cambios pequeños en la salida. De otro modo se dice que está pobremente condicionado. Por ejemplo, el
sistema
x+y=1
l.l x + y=2
presenta una dificultad obvia. Representa la intersección de líneas casi paralelas y tiene la solución x - 10 y
y=-9.
Cambiemos ahora el valor 1.1 a 1.05 y resolvamos otra vez. Esta vez x = 20 y y = -19. Un cambio de
5% en un coeficiente ha provocado un cambio del 100% en la solución.
1.14
¿Qué es un algoritmo estable?
En los cálculos prolongados es probable que se realicen muchos redondeos. Cada uno de ellos
desempeña el papel de un error de entrada para el resto del cálculo y cada uno tiene un efecto sobre la
consiguiente salida. Los algoritmos en que es limitado el efecto acumulativo de tales errores, de modo que
se genera un resultado útil, se llaman algoritmos estables. Desafortunadamente, hay ocasiones en las
que la acumulación es devastadora y la solución está colmada de errores. Es innecesario decir que esos algoritmos se denominan inestables.
www.elsolucionario.org
20
1.15
MÉTODOS NUMÉRICOS
Interprete el decimal de punto flotante +.1066*104.
Es claro que el decimal corre el punto decimal cuatro lugares a la derecha para producir 1066. De manera similar, +.1066*10-2 corresponde a .001066.
1.16
Interprete el símbolo binario de punto flotante +.10111010 * 24.
El exponente corre el punto binario cuatro lugares a la derecha, resultando 1011.1010, equivalente al
decimal 11 + ⅝ u 11.625. Similarmente, +.10111010 * 2-1 es .01011101. Éste es, desde luego, 1/32 veces el
número dado originalmente.
1.17
Interprete el símbolo binario de punto flotante 0101110100100, considerando que la mantisa usa ocho
lugares y el exponente tres, aparte de sus signos.
Los ceros en las posiciones uno y diez deben tomarse como signos más.
0101110100100
signo
mantisa
signo
exponente
El punto binario se supone a la cabeza de la mantisa. Con estas consideraciones tenemos otra vez
+.10111010* 24. De manera similar y con las mismas convenciones, +.10111010 * 2"1 se convierte en
0101110101001, correspondiendo los últimos cuatro dígitos a un exponente d e - 1 .
1.18
Sume estos números de punto flotante usando las convenciones del problema precedente
0101101110010
0100011001100
De una u otra manera, los puntos binarios tendrán que "alinearse". La interpretación de los símbolos
conduce a la siguiente suma:
+
10.110111
.000010001100
= 10.111001001100
En la forma utilizada para las entradas esto se vuelve
0101110010010
tomando nuevamente la mantisa ocho lugares y el exponente tres, aparte de los signos. Se produce un
error de redondeo cuando los últimos seis dígitos binarios se eliminan para adecuarse a la capacidad de la
máquina de cálculo.
1.19
¿Qué es un sobreflujo?
Empleando otra vez las convenciones de nuestra máquina ficticia, el número más grande que puede
expresarse es 0111111110111, siendo máximos tanto la mantisa como el exponente. Siete corrimientos del
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
21
punto binario hacen que éste se transforme en el equivalente 1111111.1 que corresponde al decimal 127 +
½, o 27 - 2-1. Cualquier número mayor que el anterior no puede representarse bajo las convenciones establecidas y se llama un sobreflujo.
1.20
¿Qué es un subflujo?
El número más pequeño que puede representarse en la forma que se está usando, aparte del cero y
de números negativos, es 0000000011111. Sin embargo, por diversas razones conviene insistir en que el
primer dígito de una mantisa es un 1. Esto se conoce como la forma normalizada, y fija el exponente. También aquí debe hacerse una excepción para el número cero. Si se requiere la normalización, el número positivo más pequeño viene a ser 0100000001111. En decimales corresponde a 2-1 * 2-7 o 2-8. Cualquier número positivo más pequeño que éste no puede representarse y se llama un subflujo. Cualquier sistema de
punto flotante de representación de números tendrá tales limitaciones y se aplicarán los conceptos de sobreflujo y subflujo.
1.21
Imagine un sistema de punto flotante aún más simple, en el que las mantisas tienen sólo tres dígitos
binarios y los exponentes son - 1 , 0 o 1. ¿Cómo se distribuyen estos números en una línea real?
Suponiendo normalización, estos números tienen la forma .1xx aparte del exponente. El conjunto
completo, por tanto, se compone de tres subconjuntos de cuatro números cada uno, en la forma que sigue:
.0100
.0101
.0110
.0111
(para exponente-1)
.100
.101
.110
.111
(para exponente 0)
1.00
1.01
1.10
1.11
(para exponente 1)
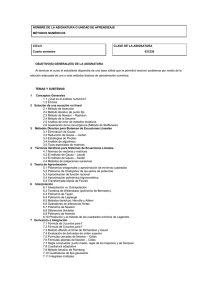
Estos subconjuntos se grafican en la figura 1.2. Note el agolpamiento más denso de los números más
pequeños, incrementándose la separación de 1/16 a ¼ conforme se pasa de un grupo a otro. Esto se debe, por
supuesto, al hecho de que tenemos sólo tres dígitos significativos (la cabeza se fija en 1), brindando el exponente un aumento progresivo a medida que crece. Por ejemplo, aquí no está disponible 1.005. El conjunto no es tan denso en esta parte de su intervalo. Sería necesario un cuarto dígito significativo. Los sistemas
de punto flotante reales tienen ese mismo rasgo, de un modo más complejo, y las ideas de dígitos significativos y error relativo son importantes.
exponente =0
exponente = -1
exponente = 1
sobreflujo
subflujo
Figura 1.2
1.22 Suponga un número x representado por un símbolo binario de punto flotante, redondeado hasta una mantisa de n bits. Suponga también normalización. ¿Cuáles son los límites de los errores absoluto y relativo
causados por el redondeo?
www.elsolucionario.org
22
MÉTODOS NUMÉRICOS
El redondeo provocará un error de cuando mucho una unidad en el lugar binario (n + 1) o de media
unidad en el lugar n-ésimo. De tal modo
Error absoluto ≤ 2-n-1
en tanto que para el error relativo debemos tomar en cuenta el verdadero valor de x. La normalización significa una mantisa no menor que i y esto lleva al siguiente límite:
|Error relativo| <
2-n-1
2-1
2-n
Es útil reescribir lo anterior dejando que fl(x) represente el símbolo de punto flotante para x. Por consiguiente
Error relativo =
fl(x)=x(l
ff(x)-x
X
= E
+ E)=x+xE
con
En consecuencia, la operación de redondeo puede verse entonces como la sustitución de x
por un valor perturbado x + xE, siendo la perturbación relativamente pequeña.
1.23
Encuentre un limite para el error relativo que se produce por la suma de dos números de punto flotante.
Sean los números
con y como el más pequeño. De tal modo que m2 deba
correrse e-f lugares a la derecha (alineamiento de los puntos binarios). Después se suman las mantisas,
se normaliza el resultado y se redondea. Hay dos posibilidades. Ocurre sobreflujo a la izquierda del punto
flotante (no sobreflujo en el sentido del problema 1.19) o no ocurre. La primera posibilidad está carac­
terizada por
1 ≤ | ml + m2*2f-e|<2
y la segunda por
½≤|m1 + m2 * 2 f-e| < 1
Si ocurre el sobreflujo, se requerirá un corrimiento de un lugar a la derecha, y tenemos
fl(x +y) = [(m1 + m2 * 2f-e) 2-1+ e ]* 2e+1
donde є es el error de redondeo. Esto puede reescribirse
con |E| ≤ 2є ≤ 2-n.
Si no hay sobreflujo, entonces
ñ(x +y) = [(mt + m2* 2f-n) + e] * 2e
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
¡23
con E limitado como antes.
Un resultado correspondiente para la resta de punto flotante se encontrará en el problema 1.45.
1.24
Encuentre un límite para el error relativo que se produce al multiplicar dos números de punto flotante.
Sean también en este caso los dos números x - m1*20 y y = m2*2f. Entonces xy - m1m2*2e+f con ¼ ≤
|m1m2| < 1 debido a la normalización. Esto significa que para normalizar el producto habrá un corrimiento a
la izquierda de cuando mucho un lugar. El redondeo producirá, en consecuencia, ya sea m1m2 + є o 2m1m2 +
є, con |є| < 2-n-1. Esto puede resumirse como sigue:
= xy(l + E)
con |E| ≤ 2 |є| ≤ 2-n.
Un resultado similar se bosqueja para la operación de la división en el problema 1.46. Esto quiere decir que en la totalidad de las operaciones aritméticas, utilizando números de punto flotante, el error relativo
que se introduce no excede de 1 en el lugar menos significativo de la mantisa.
1.25
Estime el error generado al computar la suma
x1+x2+ . . . +xk
utilizando operaciones de punto flotante.
Consideramos las sumas parciales s 1 . Sea s 1 - x 1 . Entonces
s2 = fl(s1+ x2) = (s1+ x2)(1 + E2)
con E1 acotado por 2-n como se muestra en el problema 1.23. Reescribiendo,
s2 = x1(1 + E 1 )+x 2 (1 + E2)
www.elsolucionario.org
24
MÉTODOS NUMÉRICOS
Continuando
s3 = fl(s2 + x3) = (s2 + x3)(1 + E2)
= x1(l + E 1 )(1 + E2) + x 2 (1 + E1)(1 + E2) +x 3 (1 + E2)
y finalmente
sk = fl(sk-1+ xk) = (sk-1+ xk)(1 + Ek-1)
= x1(1 + c1) + x2(1 + c2) + • • • + xk(1 + ck)
donde, para i = 2
k.
1 + c1 = (1 + Ei-1)(1 +Ei). . . (1 + Ek-1)
y 1 + c, - 1 + c2. En vista de la cota uniforme sobre las E¡, tenemos ahora esta estimación para las 1 + c¡:
(1 - 2-n)k-i+1 ≤ 1 + c1 ≤ (1 + 2-n)k-i+1
Resumiendo
(l + E)
donde
Observe que si la suma verdadera ∑x¡ es pequeña comparada con las x¡, entonces el error relativo E puede
ser grande. Éste es el efecto de cancelación causado por las sustracciones, observado antes en el problema 1.12.
1.26
Ejemplo de un análisis de error progresivo.
Suponga que se calculará el valor de A(B + C), utilizando las aproximaciones a, b y c cuyos errores
son las cantidades e1, e2, e3. Entonces el valor verdadero es
A(B + C) = (a + e1)(b + e2 + c + e3) = ab + ac + error
donde
Error = a(e2 + e3) + be1 + ce1 + e1e2 + e1e3
Suponiendo la cota uniforme |e,| < e y que los productos de error pueden despreciarse, encontramos
|Error| ≤ (2|a| + |b| + |c|)e
Este tipo de procedimiento se conoce como análisis de error progresivo. En principio puede efectuarse con
cualquier algoritmo. Sin embargo, el análisis suele ser tedioso si es que no abrumador. Además, las cotas
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
25
que resultan, con frecuencia son muy conservadoras, apropiadas si lo que se necesita es una idea del peor
de los casos que podría ocurrir. En el presente ejemplo emerge un punto de menor interés. El valor de a parece ser dos veces más sensible que los valores de b y c.
1.27
¿Qué es el análisis de error regresivo?
La idea importante detrás del análisis de error regresivo es tomar el resultado de un cálculo y tratar de
determinar el intervalo de los datos de entrada que podría haberío producido. Es importante entender el objetivo. No hay intención de modificar los datos para acomodar la respuesta. Si se completa un análisis de
error regresivo y se muestra que el resultado encontrado es consistente con los datos de entrada, dentro
del intervalo del error observacional o de redondeo, entonces puede tenerse cierta confianza del resultado.
Si esto no sucede, existe entonces una fuente principal de error en otra parte, presumiblemente dentro del
propio algoritmo.
1.28
Demuestre que el análisis de error en el problema 1.23 fue un análisis de error regresivo.
El resultado obtenido fue
fl(x+y) = (x+y)(l + E)
con |E| ≤ 2-2, donde n es el número de lugares binarios en la mantisa. Reescribiendo esto como
fl(x + y) =x(l + E) + y(l + E)
y recordando el problema 1.22, vemos que la suma tal como se computó, esto es fl(x + y), es también la
suma verdadera de los números que difieren de los x y y originales en no más que la cota del error de
redondeo E. Esto es, la salida puede ser bien explicada por los datos de entrada dentro del limite de error
reconocido.
1.29
Demuestre que el análisis efectuado en el problema 1.24 fue de error regresivo.
Encontramos
fl(xy)=xy(1 + E)
que podemos pensar como el producto de x por y(1 + E). Esto significa que el fl(xy) calculado es también el
producto verdadero de números que difieren de los x y y originales en no más que el error de redondeo.
Concuerda bien con los datos de entrada dentro de nuestro límite de error admitido.
1.30
¿Qué indica el análisis de error regresivo efectuado en el problema 1.25?
Primero, la ecuación
= x1,(1+ c1) + ••••••+ xk (1+ck)
muestra que la suma de punto flotante de k números x, a xk es también la suma verdadera de k números
que difieren de las x¡ por errores relativos de tamaño c¡. Desafortunadamente, las estimaciones obtenidas
www.elsolucionario.org
26
MÉTODOS NUMÉRICOS
entonces en el problema 1.25 muestran también que estos errores pueden ser mucho más grandes que los
simples redondeos.
1.31
Pruebe la propiedad del triángulo de la longitud de un vector, la norma L2. probando primero la desigualdad
de Cauchy-Schwarz.
es no negativa, por lo que la ecuación cua­
Una prueba interesante se inicia notando que
drática
no puede tener raíces reales distintas. Esto requiere
y al cancelar los 4 tenemos la desigualdad de Cauchy-Schwarz.
La desigualdad del triángulo se deduce casi directamente, empleando un poco de álgebra. Escrita en
forma de componentes, establece que
Elevando al cuadrado, eliminando términos comunes, elevando otra vez al cuadrado y empleando la
desigualdad de Cauchy-Schwarz llegamos al resultado deseado (véase el problema 1.50).
1.32
Muestre que la norma
vectorial tiende a máx
cuando p tiende a infinito.
Supongamos que vm es la componente absoluta más grande por lo que reescribimos la suma como
Dentro deL paréntesis todos los términos excepto el primero se acercan a cero en el límite, de donde se
concluye el resultado que se requería.
1.33
Muestre que la definición ||A || - máx ||AV || para V unitario satisface las propiedades 1, 2 y 3 que se
presentaron en la introducción.
Esto se demuestra de manera más fácil a partir de las propiedades correspondientes de la norma
vectorial asociada. Puesto que AV es un vector, ||AV || ≥ 0 y por ello ||A || ≥ 0. Si ||A || ≥ 0 e incluso si un
elemento de A no fuera cero, entonces V podría elegirse para hacer una componente de A V positiva, que
es una contradicción para máx ||A ||=- 0. Esto prueba la primera propiedad.
A continuación encontramos
||cA|| =máx ||cAV|| = máx |c| • ||AV|| = |c| • ||A||
que prueba la segunda. La tercera se maneja en forma similar.
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
1.34
27
¿Cuáles son las normas L1, L2 y L∞ de la matriz identidad?
Todas son iguales a 1. Tenemos
|| I || = máx||IV||=máx||V|| = l
puesto que V es un vector unitario.
1.35
¿Cuáles son las normas L1, L2 y L∞ de la matriz
Tenemos que
AV =
Suponga por sencillez que V1 y v2 son no negativas. Entonces para L1 sumamos y encontramos ||AV ||=
2(v1 + v2) = 2, ya que v es un vector unitario en la norma L1. De tal modo ||A ||1 = 2. Para la norma L2
debemos elevar al cuadrado y sumar las dos componentes, obteniendo 2(v22 + 2v1v2 + v22). En esta norma
v12 +v22 = 1, lo que maximizará v1v2. El cálculo elemental produce entonces v1 = v2 = 1/√2 conduciendo
rápidamente a || A ||2 = 2. Por último, ||AV ||∞ - v1 + v2, puesto que con esta norma buscamos la componente
máxima. Pero de nuevo aquí el máximo es 2, debido a que con esta norma ningún v, puede exceder 1. Las
normas L, y L∞. podrían haberse señalado de inmediato utilizando el resultado del siguiente problema o su
asociado.
1.36
Demostrar que
Elíjase un vector V con todas las componentes de tamaño 1 y signos que correspondan con las a,
de manera tal que ∑ |aη | sea máxima. Entonces ∑ aη,vj es un elemento de AV que iguala este valor máximo y
evidentemente no puede excederse. Puesto que esta V tiene norma 1, la norma de A también toma este
valor. El resultado similar para la norma L, se deja como el problema 1.52.
1.37
Demuestre que ||AV || ≤ ||A || • ||V ||.
Para un sector unitario U tenemos, por definición de IIA II,
por lo que al elegir U = V / ||V || y aplicar la propiedad 2,
1.38
Pruebe que ||AB ||≤ ||A || • ||B||.
www.elsolucionario.org
28
MÉTODOS NUMÉRICOS
Volvemos a utilizar el resultado del problema 1.37:
||AB|| = máx ||ABU|| ≤ máx ||A || •||BU || ≤ máx ||A || • ||B|| • ||U|| = ||A|| • ||B ||
Problemas suplementarios
1.39 Calcule 1 /.982 usando la teoría de apoyo
1
1-x
con x = .018.
1.40
2
=1+X+X +
...
Los números son exactos hasta dos lugares cuando su error no excede .005. Las siguientes raíces
cuadradas se toman de una tabla. Redondee cada una hasta dos lugares y anote el valor del redondeo.
¿Cómo se comparan estos errores de redondeo con el máximo de .005?
17
19
20
n
11
hasta tres lugares
3.317 3.464 3.606 3.742 3.873 4.000 4.123 4.243 4.359 4.472
hasta dos lugares
3.32
12
13
14
15
16
18
3.46
+ .003 -.004
redondeo aproximado
El error total de redondeo podría estar teóricamente en cualquier parte del intervalo de 10(-.005) a 10(.005).
¿Realmente cuál es el total? ¿Cómo se compara con el "error probable" de √10 (.005)?
1.41
Suponga que N números, todos correctos hasta un número de lugares dado, se van a sumar. ¿Aproximadamente hasta qué valor de N dejará probablemente de tener sentido el último dígito de la suma calculada?
¿Los últimos dos dígitos? Use la fórmula del error probable.
1.42
Una sucesión J0, J1,J2, . . . está definida por
con J0 = .765198 y J1 = .440051 correctos hasta seis lugares. Calcule J2 , J7 y compare con los valores
correctos que siguen. (Estos valores correctos se obtuvieron mediante un proceso por completo diferente.
Véase el siguiente problema para explicación de errores.)
n
Jn correcto
2
3
4
5
.6
7
.114903
.019563
.002477
.000250
.000021
.000002
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
1.43
29
Muestre que para la sucesión del problema anterior,
exactamente. Calcule esto a partir de los valores dados de J0 y J1. Se obtendrá el mismo valor erróneo. Los
coeficientes grandes multiplican los errores de redondeo en los valores dados de J0 y J1 y los resultados
combinados contienen entonces un error grande.
1.44
Hasta en seis lugares el número JB debe ser cero. ¿Qué es lo que en realidad produce la fórmula del
problema 1.42?
1.45Muestre que el error introducido por la resta de punto flotante está acotada por
Sean
como en el problema 1.23. Entonces
y a menos que esto sea cero
La normalización de la nueva mantisa puede requerir hasta n - 1 corrimientos a la izquierda, determinán­
dose el número real s por medio de
Mostrar entonces que
y finalmente
1.46
Mostrar que el error introducido durante una división de punto flotante está acotado por 2-n. Con las con­
venciones del problema 1.24, déjese que la mitad de la mantisa del numerador sea dividida por la mantisa
del denominador (para evitar cocientes mayores que uno) y que se resten los exponentes. Esto produce
Después de esto, sígase el resto del análisis efectuado para la operación de
con
multiplicación con el fin de mostrar otra vez que el error relativo está acotado como se establece.
1.47
Analice el cálculo del producto interior
como el del problema 1.25. Sea
y después establezca que
www.elsolucionario.org
30
MÉTODOS NUMÉRICOS
para
Esto hace a sk el producto interior requerido. A continuación encuentre relaciones y es­
timaciones similares a las que se encontraron en el problema anterior mencionado.
1.48
Usando las convenciones del problema 1.17, interprete este símbolo de punto flotante: 0100110011010.
(Este número se aproxima mucho a .1492 con una mantisa de sólo 8 bits.)
1.49
Imitando el problema 1.21, imagine un sistema de punto flotante en el cual las mantisas normalizadas
tienen 4 bits y los exponentes son - 1 , 0 y 1. Muestre que estos números forman tres grupos de ocho, de
otro en el intervalo de a 1, y el ter­
acuerdo con sus exponentes, cayendo un grupo en el intervalo de
cero entre 1 y 2. ¿Cuáles números positivos causarán sobreflujo? ¿Y subflujo?
1.50
Complete la prueba iniciada en el problema 1.31.
1.51
Termine el problema 1.33 demostrando que la norma de la suma de dos matrices no excede la suma de
sus normas.
1.52
Mediante la elección adecuada de un vector unitario (una componente 1, el resto 0) muestre que la norma
Z.1 de una matriz A puede calcularse como el máximo de la suma de columna de elementos absolutos.
Compare con la prueba relacionada en el problema 1.36.
1.53
Demuestre que para A =
las normas
1.54
Demuestre que para A =
la norma
1.55
Demuestre que para,4 =
un vector V maximiza \\AV H2 puede encontrarse en la forma
con eos
en tanto que tan
1.56
en el caso
y
son iguales.
es
en otro caso.
Se ha sugerido que el siguiente mensaje se transmita al espacio exterior como una señal de que en el
planeta hay vida inteligente. La idea es que cualquier forma de vida inteligente en cualquier parte compren­
da con seguridad su contenido intelectual y con ello deduzca nuestra presencia inteligente aquí en la Tierra.
¿Cuál es el significado del mensaje?
11.001001000011111101110
1.57 Si el vector V con componentes x, y se usa para representar el punto (x, y) de un plano, entonces los pun­
forman el clásico círculo unitario. Como se
tos correspondientes a vectores unitarios en la norma
y
el "círculo" toma una forma cuadrada. En una ciudad de
muestra en la figura 1.1, en las normas
cuadras cuadradas, ¿cuál es la norma adecuada para un viaje en taxi? (Encuentre todas las intersecciones
a una distancia dada de una intersección determinada.) En un tablero de ajedrez, ¿por qué es la norma
apropiada para los movimientos del rey la norma L»?
1.58
Codifique en PASCAL, FORTRAN o BASIC las siguientes fórmulas, recordando que se debe respetar la
jerarquía de operaciones en el código (paréntesis, potencia, multiplicación/división y suma/resta; en todos
los casos de izquierda a derecha).
www.elsolucionario.org
¿QUÉ SON LOS MÉTODOS NUMÉRICOS?
1.59
Con los valores de
con cinco dígitos significativos, calcule
utilizando los siguientes métodos:
31
tan exacto como sea posible,
a) Evaluación directa
b) Racionalizando el numerador
c) Por el teorema del valor medio
d) Desarrollo en series de Taylor alrededor del punto x - 50
1.60
Haga un programa en BASIC o PASCAL para evaluar
20 puntos.
1.61
Haga un programa para evaluar iterativamente las expresiones siguientes:
dando valores grandes de x, evalúe
dando valores para
1.62
Deduzca las fórmulas de error relativo para: a) suma; b) resta; c) multiplicación; d) división.
1.63
Determine las fórmulas de error relativo de las siguientes operaciones:
1.64
Realice la suma siguiente con números normalizados, asumiendo que la mantisa es de cuatro dígitos
(recuerde que a medida que se van haciendo las sumas de una cifra con la siguiente, se va acarreando un
error de redondeo).
www.elsolucionario.org
32
MÉTODOS NUMÉRICOS
a)
b)
c)
Sume las cifras de arriba hacia abajo.
Sume las cifras de abajo hacia arriba.
Asuma que están normalizados a 10 dígitos significativos.
a)
Datos
.3767 * 10°
.7658 * 10°
.3564 * 101
.7649 * 101
.5686 * 102
.1436* 102
.2456 * 103
.1563 * 103
.9586 * 104
.4396 * 104
c)
b)
Sumas
parciales
.3767 * 10°
.1143*10'
.4707 * 101
.1236* 102
.6922 * 102
.8358 * 102
.3292 * 103
.4855 * 103
.1007 *10 5
.1447 *10 5
Datos
.4396 * 104
.9586 *10 4
.1563 * 103
.2456 * 103
.1436 *10 2
.5686 * 102
.7649 * 101
.3564 * 101
.7658 * 10°
.3767 * 10°
Sumas
parciales
4
.4396 * 10
.1398 *10 5
.1414 * 105
.1439 * 105
.1440 *10 5
.1446 *10 5
.1447 *10 5
.1447 *10 5
.1447 *10 5
.1447 * 105
www.elsolucionario.org
Datos
Sumas parciales
.3767 * 10°
.7658 * 10°
.3564 * 101
.7649 * 101
.5686 * 102
.1436 * 102
.2456 * 103
.1563 * 103
.9586 * 104
.4396 * 104
.3767000000 * 10°
.1142500000* 101
.4706500000 * 101
.1235550000 * 102
.6921550000 * 102
.8357550000 * 102
.3291755000 * 103
.4854755000 * 103
.1007114755 *10 5
.1446747550 * 105
Polinomios de
colocación
2
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras por qué es útil aproximar una función a un polinomio (Introducción
de los capítulos 1.12.21, 22, 23, 24).
2. Explicar con sus propias palabras cuando menos cuatro de las desventajas e inconvenientes de
aproximar mediante un polinomio una función (Introducción de los capítulos 2,12,21,22,23,24).
3. Definir con sus propias palabras lo que es colocación polinomial (Introducción de los capítulos 2,12,
21,22,23,24).
4.
Definir con sus propias palabras lo que son polinomios osculadores (Introducción de los capítulos 2,
12,21,22,23,24).
5. Definir con sus propias palabras lo que significa aproximación polinomial mediante mínimos cuadrados
(Introducción, Capítulo 21).
6. Definir con sus propias palabras lo que significa aproximación polinomial mediante minimax
(Introducción, Capitulo 22).
7. Describir con sus propias palabras cuando menos cuatro de las diferencias en el significado de
colocación, osculación, mínimos cuadrados y minimax (Introducción de los capítulos 2,10,12,21,
22).
8. Describir con sus propias palabras cuando menos cuatro de las semejanzas en el significado de
colocación, osculación, mínimos cuadrados y minimax (Introducción de los capítulos 2,10,12, 21,
22).
9. Demostrar que si se aproxima una función mediante un polinomio de colocación en ciertos puntos,
éste es único (Introducción, Problemas 2.6,2.7,2.19, 2.20).
10. Demostrar que un polinomio de grado n tiene cuando mucho n ceros (Introducción, Problema 2.5).
11. Aplicar el algoritmo de división a un polinomio dado (Introducción, Problemas 2.1, 2.3).
12. Aplicar el teorema del residuo a un polinomio dado (Introducción, Problemas 2.2, 2.3).
13. Aplicar el teorema del factor a un polinomio dado (Introducción, Problemas 2.1 a 2.4).
14. Explicar con sus propias palabras la división sintética o método de Horner (Introducción, Problemas
2.3.2.11,2.12).
15. Aplicar el algoritmo de división sintética a un polinomio dado (Problemas 2.3, 2.11, 2.12).
16. Aplicar el algoritmo de división sintética a un polinomio dado, para obtener la primera derivada
evaluada en un punto dado (Problemas 2.3,2.11,2.12, Capítulo 25).
17. Conociendo una función real, aproximarla mediante un polinomio de colocación; posteriormente
comparar el resultado con la función real (Problemas 2.7, 2.9, 2.10, 2.14, 2.15).
www.elsolucionario.org
34
MÉTODOS NUMÉRICOS
18. Conociendo una función real, aproximarla mediante un polinomio de colocación; después obtener la
diferencia entre la aproximación y la función real (Problemas 2.7, 2.9, 2.15, 2.20, 2.21).
19. Conociendo una función real, aproximarla mediante un polinomio de colocación y derivar el polinomio
hasta la segunda derivada; posteriormente comparar los resultados con la función real y sus
derivadas (Problemas 2.16, 2.17).
20. Conociendo una función real, aproximarla mediante un polinomio de colocación e integrarla;
posteriormente comparar los resultados con la función real y su integral (Problema 2.19).
21. Estimar la precisión de los polinomios de colocación (Problemas 2.9,2.15).
APLICACIONES DE LOS POLINOMIOS DE COLOCACIÓN
Los polinomios de colocación garantizan que el valor de la función y el del polinomio de aproximación son iguales en determinados puntos; sin embargo no garantizan nada con referencia a la primera derivada o a derivadas de órdenes superiores. Asimismo, es interesante empezar a observar y a comparar qué ocurre cuando
integramos una función obtenida mediante polinomios de colocación, de la cual sí conocemos su forma real.
Estos polinomios se podrán emplear cuando no necesitemos obtener datos de ninguna derivada y ge­
neralmente se utilizan aproximaciones cuando la función original es difícil de evaluar o bien de ser utilizados
en alguna aplicación.
Otro de los casos de utilización es cuando sólo nos interesan ciertos puntos de la función original y ésta
no es sencilla de evaluar; también cuando no conocemos una función original y sólo contamos con una muestra de los puntos reales.
Este capítulo es introductorio y está muy orientado hacia la comprensión y el dominio de la mecanización,
ya que el concepto se empleará más adelante.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Colocación polinomial
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial de funciones trigonométricas
Manejo de funciones discretas
Diferencias divididas
Polinomios factoriales
www.elsolucionario.org
2
10
11
13
14
21
22
23
24
3
4
POLINOMIOS DE COLOCACIÓN
Sumas
Sumas y seríes
El polinomio de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equiespaciados
Interpolación por segmentos (spllnes)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Integrales simples con puntos de singularidad
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas
Manejo de ecuaciones
Ecuaciones en diferencias
Ecuaciones diferenciales
Sistemas de ecuaciones diferenciales
Álgebra no lineal y optimización
Raíces de ecuaciones
Ceros de polinomios
www.elsolucionario.org
35
5
17
6
7
8
9
12
13
14
15
16
21
22
23
24
18
19
20
25
25
36
MÉTODOS NUMÉRICOS
APROXIMACIÓN POR POLINOMIOS
La aproximación por polinomios es una de las ideas más antiguas en el análisis numérico y sigue siendo una de
las más utilizadas. Un polinomio p(x) se usa como un sustituto para la función y(x), por un sinnúmero de razones.
Quizá la más importante de todas sea que los polinomios son fáciles de calcular al incluir solamente potencias
simples de enteros. Sus derivadas e integrales se encuentran también sin mucho esfuerzo y son también polino­
mios. Las raíces de ecuaciones de polinomios se descubren con menores dificultades que en el caso de otras fun­
ciones. No es difícil entender el porqué de la popularidad de los polinomios como sustitutos.
CRITERIO DE APROXIMACIÓN
La diferencia y(x) - p(x) es el error de la aproximación, y la idea central es, desde luego, mantener este error razo­
nablemente pequeño. La simplicidad de los polinomios permite que esta meta se alcance de diversas maneras, de
las cuales consideraremos
1. colocación
2. osculación
3. mínimos cuadrados
4. minimax
EL POLINOMIO DE COLOCACIÓN
El polinomio de colocación es el objetivo de éste y los siguientes capítulos. Coincide (se coloca) con y(x) y en cier­
tos puntos especificados. Varias propiedades de tales polinomios, y de los polinomios en general, desempeñan un
papel en el desarrollo.
1. El teorema de existencia y unicidad establece que existe exactamente un polinomio de colocación de
...,
es decir, tal que y(x) - p(x) para estos argumentos. La existencia se
grado n para argumentos
probará exhibiendo realmente un polinomio de tales características en los capítulos siguientes. La unici­
dad se prueba en el presente capítulo y es una consecuencia de ciertas propiedades elementales de los
polinomios.
2.
El algoritmo de la división. Todo polinomio p(x) puede expresarse como
donde r es cualquier número, g(x) es un polinomio de grado n - 1, y R es una constante. Esto tiene dos
corolarios inmediatos.
3.
El teorema del residuo establece que p(r) - R
4.
El teorema del factor establece que si p(r) - 0, entonces x - r es un factor de p(x).
5. La limitación en ceros. Un polinomio de grado n puede tener a lo más n ceros, lo que equivale a que la
ecuación p(x) - 0 puede tener a lo más n raíces. El teorema de unicidad es una consecuencia inmediata,
como se demostrará.
6.
La división sintética es un procedimiento (o algoritmo) económico para producir q(x) y R del algoritmo de
la división. A menudo se emplea para obtener R, que por el teorema del residuo es igual a
Este cami­
no hacia p(r) puede ser preferible en vez de la computación directa de este valor del polinomio.
www.elsolucionario.org
POLINOMIOS DE COLOCACIÓN
7.
37
desempeña un papel central en la teoría de la colocación.
El producto
Note que se hace cero en los argumentos
que corresponden a nuestros argumentos de co­
locación. Se mostrará que el error del polinomio de colocación es
y(x)-p(x) =
donde depende de x y se encuentra entre los puntos extremos de colocación, siempre y cuando la pro­
pia x lo esté. Note que esta fórmula se reduce a cero en
de manera que p(x) corresponde a
y(x) en esos argumentos. En otra parte consideraremos p(x) como una aproximación a y(x).
Problemas resueltos
2.1
Demuestre que cualquier polinomio p(x) puede expresarse como
donde r es cualquier número, q(x) es un polinomio de grado n -1 y R es una constante.
Éste es un ejemplo del algoritmo déla división. Sea p(x) de grado n.
Entonces
será de grado n - 1 o menor. De manera similar.
será de grado n - 2 o menor. Continuando de esta forma, llegaremos finalmente al polinomio
cero, una constante. Renombrando como R esta constante, tenemos
2.2
Demuestre que
Sea
2.3
de grado
Éste se llama el teorema del residuo.
en el problema 2.1. Inmediatamente,
efectuando la división descrita en el problema 2.1, usando r - 2 y
www.elsolucionario.org
38
MÉTODOS NUMÉRICOS
La división sintética es meramente una versión abreviada de las mismas operaciones descritas en el
problema 2.1. Sólo aparecen los coeficientes diferentes. Para los p(x) y r anteriores, el arreglo inicial es
1 - 3 5 7
coeficientes dep(x)
1
"Multiplicamos" tres veces por r y "sumamos" para completar el arreglo.
1 - 3 5 7
2-2
6
1-1
3
13
el número R
coeficientes
dcq(x)
Por tanto,
Esto puede verificarse calculando (x - r)q(x) + R, que será p(x).
Resulta también útil determinar q(x) por el método de la "división larga", empezando a partir de este arreglo
familiar:
Comparando el cálculo resultante con el algoritmo "sintético" que acaba de realizarse, puede observarse fá­
cilmente la equivalencia de los dos.
2.4
Demuestre que si p(r) - 0, entonces x - r es un factor de p(x). Éste es el teorema del factor. El otro factor
tiene grado n - 1 .
Por lo que tenemos que,
2.5
Pruebe que un polinomio de grado n puede tener a lo más n ceros, lo que equivale a que p(x) - 0 pueda
tener a lo más n raíces.
Suponga que existen n raíces. Llámense
factor,
Entonces por n aplicaciones del teorema del
donde A tiene grado 0, una constante. Esto hace claro que no puede haber otras raíces. (Note también que
2.6
Demuestre que al menos un polinomio de grado n puede tomar los valores especificados yk en los ar­
gumentos dados
donde
Suponga que hay dos de tales polinomios,
Entonces la d i f e r e n c i a s e ­
ría de grado n o menor, y tendría ceros en todos los argumentos
Puesto que hay n + 1 de tales
argumentos, esto contradice el resultado del problema anterior. De modo que, a lo más un polinomio puede
tomar los valores especificados. En los siguientes capítulos se presenta este polinomio en varias formas úti­
les. Éste se llama el polinomio de colocación.
www.elsolucionario.org
POLINOMIOS DE COLOCACIÓN
2.7
39
Suponga que un polinomio p(x) de grado n toma los mismos valores que una función y(x) para
[Esto se denomina colocación de dos funciones y p(x) es el polinomio de colocación.] Obtenga una fórmula
para la diferencia entre p(x) y y(x).
Como la diferencia es cero en los puntos de colocación, anticipamos un resultado de la forma
que puede tomarse como la definición de C. Consideremos ahora la siguiente función F(x):
Esta F(x) es cero para
y si elegimos un nuevo argumento
entonces
será también cero. Ahora F(x) tiene por lo menos n + 2 ceros. Por el teorema de
tiene entonces garantizados n + 1 ceros entre aquellos de F(x), en tanto que están garantizados n ceros pa­
entre aquellos de
Al continuar aplicando el teorema de Rolle en esta forma se mostrará al fi­
ra
nal que
tiene al menos un cero en el intervalo de
digamos e n D e s p u é s de esto calcúle­
se esta derivada, recordando que la derivada (n + 1) de p(x) será cero, y haciendo x igual a
Esto determina C, que ahora puede sustituirse en uno de los pasos anteriores:
Puesto que
puede ser cualquier argumento entre
excepto
e
n
y puesto que nuestro re­
sultado es también evidentemente cierto en
s u s t i t u i m o s . p o r la más simple x:
Este resultado es con frecuencia bastante útil a pesar del hecho de que el número
determinarse, debido a que podemos estimar
independientemente de
2.8
a menudo no puede
Encontrar un polinomio de primer grado que toma los valores y(0) - 1 y y(1) - 0, o en forma tabular
0
1
1
0
El resultado p(x) - 1 - x es inmediato ya sea por inspección o por geometría elemental. Éste es el polinomio de colocación para los escasos datos proporcionados.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
40
2.9
La función y(x) - eos \nx toma también los valores especificados en el problema 2.8. Determinar la diferen­
cia y(x) -p(x).
Por el problema 2.7, con n - 1,
Incluso sin determinar
podemos estimar esta diferencia mediante
Considerando p(x) como una aproximación lineal de y(x), esta estimación de error es simple, aunque el
sugiere un error de aproximadamente .3, en tanto que el error real es aproxi­
error es amplio. En
madamente
2.10
Cuando el grado n se incrementa indefinidamente, ¿la secuencia resultante del polinomio de colocación
converge a y(x)?
La respuesta es algo complicada. Para una elección cuidadosa de los argumentos de colocación y
funciones razonables y(x), está asegurada la convergencia, como se verá después. Pero para el caso más
común de argumentos igualmente espaciados xk, puede ocurrir divergencia. Para alguna y(x) la sucesión de
polinomios es convergente para todos los argumentos x. Para otras funciones, la convergencia se limita a
un intervalo finito, con el error y(x) - p(x) oscilando en la forma que se muestra en la figura 2-1. Dentro del
intervalo de convergencia la oscilación se interrumpe y el lím (y - p ) = 0, pero fuera del intervalo y(x) -p(x)
produce la oscilación, siendo afectado el ta­
crece arbitrariamente a medida que aumenta n. El factor
maño de la misma por las derivadas de y(x). Este comportamiento del error es una seria limitación para el
uso de polinomios de colocación en alto grado.
y(x) - p(x)
intervalo de
convergencia
Fig.2-1
www.elsolucionario.org
POLINOMIOS DE COLOCACIÓN
41
Problemas suplementarios
2.11
Aplique la división sintética para dividir
es un factor de
es un cero de f(x).
2.12
Aplique la división sintética a p(x) - 2x* - 24X3 + 100x2 - 168x + 93 para calcular p(1). (Divida entre x - 1 y
tomé el residuo R.) Calcule también p(2), p(3), p(4), p(5).
2.13
Para encontrar un polinomio de segundo grado que toma los siguientes valores:
podríamos escribir p(x) - A + Bx +
0=A
entre x - 1. Note que
0
1
2
0
1
0
y sustituir para encontrar las condiciones
1=A + B + C
G = A+2B + 4C
Resuelva con respecto de A, B y C y determine asi el polinomio de colocación. Teóricamente se aplica el
mismo procedimiento para polinomio de mayor grado, pero pueden desarrollarse algoritmos más eficientes.
2.14
La función
2.7 para mostrar que
también toma los valores especificados en el problema 2.13. Aplique el problema
donde t, depende de x.
2.15
Continúe el problema 2.14 para mostrar que
Esto estima la precisión del polinomio de colocación p(x) como una aproximación a y(x). Calcule esta esti­
mación en x -1 y compare con el error real.
2.16
Compare
en
2.17
Compare
en
2.18
Compare las integrales de y(x)y p(x) sobre el intervalo (0,2).
2.19
Encuentre el polinomio cúbico único p(x) que toma los siguientes valores.
www.elsolucionario.org
42
MÉTODOS NUMÉRICOS
xk
0
1 2
3
yk
0
1
16
81
2.20
La función
toma también los valores dados en el problema anterior. Escriba una fórmula para la
diferencia y(x) - p(x), utilizando el problema 2.7.
2.21
¿Cuál es el máximo de |y(x) -p(x)| en el intervalo (0, 3)?
www.elsolucionario.org
Diferencias
divididas finitas
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar por qué es útil emplear diferencias finitas, para aproximar una función a un polinomio
(Introducción, Capítulos 6,12).
2. Explicar las desventajas e inconvenientes de aproximar una función mediante un polinomio obtenido
por diferencias finitas (Introducción, Capítulos 6,12).
3. Explicar con sus propias palabras lo que son las diferencias de una función constante (Introducción,
Problema 3.6).
4. Explicar con sus propias palabras lo que son las diferencias de una constante multiplicada por otra
función (Introducción, Problema 3.7).
5. Explicar con sus propias palabras lo que es la diferencia de la suma de dos funciones (Introducción,
Problemas 3.8, 3.9).
6. Explicar con sus propias palabras la propiedad de linealidad (introducción, Problemas 3.8, 3.9,3.18,
3.27).
7. Explicar con sus propias palabras lo que son las diferencias de un producto (Introducción, Problema
3.6).
8. Explicar con sus propias palabras lo que son las diferencias de un cociente (Introducción, Problema
3.15).
9. Explicar con sus propias palabras lo que son las diferencias de una función de potencia (Introducción,
Problemas 3.3 a 3.5, 3.14,3.19 a 3.21,3.26,3.28, 3.29).
10. Explicar con sus propias palabras lo que son las diferencias de las funciones seno y coseno
(Introducción, Problemas 3.30,3.31).
11. Explicar con sus propias palabras lo que son las diferencias de la función logaritmo (Introducción,
Problema 3.32).
12. Construir tablas de diferencias a partir de datos tabulados, además de sugerir datos faltantes, de
acuerdo con el comportamiento de los existentes (Problemas 3.1, 3.2, 3.10,3.11, 3.13,3.22 a 3.25,
Capítulos 6, 7).
13. Identificar y sugerir corrección de datos fuera de rango o con error, mediante la construcción de
tablas de diferencias a partir de datos tabulados (iniciar intuitivamente el proceso de suavización)
(Problemas 3.1,3.2,3.10 a 3.12. 3.16, 3.17, Capítulos 6 , 7 , 2 1 , 22).
www.elsolucionario.org
44
MÉTODOS NUMÉRICOS
APLICACIONES DE LAS DIFERENCIAS DIVIDIDAS FINITAS
Este capítulo está orientado hacia el dominio de la mecanización, ya que el concepto se empleará más adelante,
como se puede observar en el capítulo 6, que está basado en estos conocimientos.
La interpolación es un método que nos permite encontrar puntos desconocidos dentro de un intervalo
de puntos conocidos; existen muchos métodos de interpolación y varios de ellos se basan en la obtención de diferencias divididas; ésta es la razón por la cual se tratan en primer lugar como un tema aparte, el que posteriormente se integrará a los métodos de interpolación.
El uso de diferencias divididas tiene tanto ventajas como desventajas; entre las ventajas podemos mencionar que:
1)
Es muy sencillo introducir nuevos puntos dentro del intervalo,
2)
En caso de necesidad podremos quitar otros puntos,
3) Con sólo observar la tabla podemos deducir el grado máximo del polinomio de interpolación y elegir el
que nos convenga,
4) Al ir obteniendo las diferencias, nos podemos percatar de errores en los datos.
5)
En caso de falta da datos, observando cuidadosamente el comportamiento de la tabulación inicial y de las
diferencias, podremos deducir los faltantes o bien detectar los erróneos.
Dentro de las desventajas, se encuentra:
1)
Se requiere que las abscisas (x0, x,, x 2 . . . , xn) sean equidistantes para obtener el polinomio de interpolación, lo cual se puede eliminar empleando otra técnica.
En los siguientes temas veremos que el polinomio único de interpolación se puede representar en otras formas explícitas, expresándolo en términos de diferencias divididas (llamadas diferencias divididas finitas.) Se puede encontrar un número de diferentes formas explícitas de polinomios, dependiendo de que usemos diferencias
progresivas, regresivas o centrales.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Manejo de funciones discretas
Diferencias divididas
Polinomios factoriales
Sumas (sumatorias)
Sumas y series
La fórmula de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equidistantes
Interpolación por segmentos (splines)
Interpolación
3
4
5
17
6
7
8
9
12
www.elsolucionario.org
DIFERENCIAS DIVIDIDAS FINITAS
45
DIFERENCIAS FINITAS
Las diferencias finitas han ejercido una fuerte atracción para los matemáticos durante siglos. Isaac Newton fue uno
de los que más recurrió a ellas, y gran parte del tema se originó con él. Dada una función discreta, esto es, un
conjunto finito de puntos
teniendo cada uno su correspondiente pareja
y suponiendo que los puntos están
igualmente espaciados, esto es
las diferencias de los valores se denotan
y se llaman primeras diferencias. Las diferencias de éstas se denotan
y se llaman segundas diferencias. En general,
define a las n-ésimas diferencias.
La tabla de diferencias es el formato estándar para desplegar las diferencias finitas. Su forma diagonal hace
que cada entrada, con excepción de
corresponda a la diferencia de sus dos vecinos más cercanos a la iz­
quierda.
Cada diferencia demuestra ser una combinación de los valores y en la segunda columna. Un sencillo ejemplo es
El resultado general es
donde
es un coeficiente binomial.
FÓRMULAS DE DIFERENCIA
Las fórmulas de diferencia para las funciones elementales son un poco paralelas a aquellas del cálculo. Entre los
ejemplos se incluyen:
1. Las diferencias de una función constante son cero. En símbolos,
www.elsolucionario.org
46
MÉTODOS NUMÉRICOS
donde C denota una constante (independiente de k).
2.
Para una constante por otra función, tenemos
3.
La diferencia de una suma de dos funciones es la suma de sus diferencias:
4.
La propiedad de linealidad generaliza los dos resultados anteriores como
. 5.
donde C1 y C2 son constantes.
Las diferencias de un producto están dadas por la fórmula
6.
en la cual debe observarse el argumento k + 1.
Las diferencias de un cociente son
7.
y también aquí debe notarse el argumento k + 1.
Las diferencias de la función potencia están dadas por
\vk/
vk+1vk
8.
El caso especial C = 2 lleva a
Las diferencias de las funciones seno y coseno son también evocaciones de los resultados correspon­
dientes del cálculo, pero los detalles no son tan atractivos.
9.
Las diferencias de la función logaritmo son un desengaño similar. Con
www.elsolucionario.org
tenemos
DIFERENCIAS DIVIDIDAS FINITAS
47
Cuando
es muy pequeño
corresponde aproximadamente a
pero en otro caso el recí­
proco de x, que tiene un lugar fundamental en el cálculo de logaritmos, es demasiado remoto.
10.
La función de error unitario, para la cual
en un único argumento y 0 en otro caso, tiene una tabla
de diferencia compuesta de los coeficientes binomiales sucesivos con signos alternantes. La detección de
errores aislados en la tabla de valores puede basarse en esta propiedad de la función error unitario.
11. La función de error oscilante, para la cual
alternativamente, tiene una tabla de diferencias com­
puesta por potencias sucesivas de 2 con signos alternantes.
12. Otras funciones de especial interés se estudiarán en capítulos posteriores, y las relaciones entre el cálcu­
lo de diferencias y el diferencial será de continuo interés.
Problemas resueltos
3.1
Calcule hasta la tercera diferencia de la función discreta cuyos valores se muestran en las columnas
de la tabla 3.1. (La variable entera k aparece también por conveniencia.)
Las diferencias requeridas aparecen en las tres columnas restantes. La tabla 3.1 recibe el nombre de
tabla de diferencias. Su estructura diagonal se ha convertido en un formato estándar para desplegar dife­
rencias. Cada entrada en las columnas de diferencias es la diferencia de sus dos vecinos más cercanos a
la izquierda.
Tabla 3.1
0
1
1
1
2
8
2
3
27
3
4
64
4
5
125
5
6
216
6
7
343
7
8
512
7
19
37
61
91
127
169
12
18
24
30
36
42
6
6
6
6
6
Cualquier tabla como ésta muestra diferencias como las que se muestran en la tabla 3.2.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
48
Tabla 3.2
Por ejemplo
etc.
3.2
¿Qué sucede con las diferencias cuarta y de orden mayor de la función del problema 3.1 ?
Cualesquiera de tales diferencias es cero. Esto es un caso especial que se obtendrá más adelante.
3.3
Demuestre que
Ya sea a partir de la tabla 3.2 o de las definiciones proporcionadas al principio,
3.4
Demuestre que
Por definición
Empleando el resultado del problema 3.3 y la casi idéntica diferencia
obtenida al avanzar todos los índices más bajos, el resultado requerido se obtiene de inmediato.
3.5
Pruebe que para cualquier entero positivo k,
donde se ha utilizado el familiar símbolo de los coeficientes binomiales,
La demostración se hará por inducción. Para k - 1, 2, 3 y 4 ya se ha demostrado la proposición, por
www.elsolucionario.org
DIFERENCIAS DIVIDIDAS FINITAS
49
definición cuando k es 1. Supóngase cierta cuando k es algún entero particular p:
¡-o
Avanzando todos los índices más bajos tenemos también
y mediante un cambio en el índice de la suma, básicamente; - / +1
Conviene además realizar un cambio nominal del índice de la suma
en nuestra otra suma:
Entonces
Ahora usando
(véase el problema 4.5) y haciendo un cambio final del índice de la suma,
De este modo nuestro resultado se establece cuando k es el entero p + 1. Esto completa la inducción.
3.6
Pruebe que para una función constante todas las diferencias son cero.
Sea
3.7
para todo k. Ésta es una función constante. Entonces, para todo k.
Pruebe que
Esto es análogo a un resultado del cálculo
Esencialmente este problema comprende dos funciones definidas para los mismos argumentos
Una función tiene los valores
y la otra los valores
Hemos probado
3.8
Considere dos funciones definidas para el mismo conjunto de puntos
Denomine los valores de estas fun­
ciones mediante
Considere también una tercera función con valores
www.elsolucionario.org
50
MÉTODOS NUMÉRICOS
donde
son dos constantes (independientes de xk). Demuestre que
Ésta es la propiedad de linealidad de la operación de la diferencia.
La prueba es directa a partir de las definiciones.
Es claro que la misma prueba se aplicaría en sumas de cualquier longitud finita.
3.9
Con los mismos símbolos que en el problema 3.8, considere la función con los valores
que
y pruebe
Empezando de nuevo a partir de las definiciones,
El resultado
3.10
también podría demostrarse.
Calcule las diferencias de la función presentada en las primeras dos columnas de la tabla 3.3. Esto puede
considerarse como un tipo de "función de error", si uno supone que todos sus valores son cero, pero un
solo 1 es un error unitario.¿De qué manera este error unitario afecta las diversas diferencias?
Algunas de las diferencias que se requieren aparecen en las columnas de la tabla 3.3.
Tabla 3.3
www.elsolucionario.org
DIFERENCIAS DIVIDIDAS FINITAS
51
Este error afecta una parte triangular de la tabla de diferencias, incrementándose para diferencias
más altas y teniendo un patrón de coeficiente binomiai.
3.11
Calcule las diferencias para la función presentada en las primeras dos columnas de la tabla 3.4. Ésta puede
verse como un tipo de función de error, siendo cada valor un error de redondeo de valor igual a una unidad.
Mostrar que el patrón alternante ± conduce a un serio crecimiento del error en las diferencias más altas. Por
fortuna, los errores de redondeo raramente se alternarán de esta manera.
Algunas de las diferencias que se necesitan aparecen en las otras columnas de la tabla 3.4. El error
se duplica en cada diferencia de orden mayor.
Tabla 3.4
X0 1
-2
x1
-1
x2
1
x3
—
2
-2
4
-4
x4
1
x5
-1
-4
-2
16
8
4
1
2
-8
-8
64
32
16
8
4
-32
-16
2
1
3.12
Un número en esta lista es un error de imprenta. ¿Cuál es?
1
2
4
8
16
26
Calculando las primeras cuatro diferencias, y presentándolas en forma horizontal para utilizar otro formato, tenemos
1
2
4
8
10
16
1 2
4
2
6
6
1 2 - 2 4
0
1 - 4 6 - 4 1
22
29
7
1
y es inevitable la impresión de que estos coeficientes binominales surgen de un error de los datos de tamaño
1 en la entrada central 16 de la lista original. Cambiándolo por 15 se produce la nueva lista
1
2
4
8
15
26
42
www.elsolucionario.org
64
93
MÉTODOS NUMÉRICOS
52
de la cual encontramos las diferencias
1
2
1 2
4
3
7
11
4
16
22
5
6
29
7
que sugieren un trabajo bien hecho. Éste es un ejemplo muy sencillo de ajuste de datos, que trataremos en
forma más detallada en un capítulo posterior. Existe siempre la posibilidad de que los datos tales como los
de nuestra lista original provengan de un procedimiento irregular, no de una de ajuste, por lo que la irregularidad (16 en vez de 15) es real y no un error de imprenta. El análisis anterior puede considerarse como una
detección de irregularidades, más que una corrección de errores.
Problemas suplementarios
3.13
Calcule hasta cuartas diferencias para los siguientes valores
0
1
0 1
2
16
.(Puede suponerse en este caso que
3
4
5
6
81
256
625
1296
3.14
Verifique el problema 3.5 para k - 5 mostrando directamente de la definición que
3.15
Imitando el problema 3.9, pruebe que
3.16
Calcule hasta las quintas diferencias para observar el efecto de "errores" adyacentes de tamaño 1.
3.17
3.18
0
1
2
3
4
5
6
7
0
0
0
1
1
0
0
0
Encuentre y corrija un error simple en estos valores
k
0
1
2
3
4
5
6
7
yk
0
0
1
6
24
60
120
210
Use la propiedad de linealidad para mostrar que si
entonces
www.elsolucionario.org
DIFERENCIAS DIVIDIDAS FINITAS
3.19
Demuestre que si
entonces
3.20
Demuestre que si
entonces
3.21
Demuestre que si
entonces
3.22
Calcule los valores
3.23
Calcule ios valores
3.24
Calcule los valores que faltan de
que faltan a partir de las diferencias primeras que se proporcionan
que faltan a partir de los datos que se brindan.
0
a partir de los datos que se proporcionan.
0
0
0
0
0
24
6
6
18
12
6
6
3.25
53
6
60
36
18
6
6
6
6
Encuentre y corrija el error de imprenta en estos dates.
1 3 11 31 69 113 223 351 521 739 1011
3.26
escriba un desarrollo similar para
Calcule la suma de estas segundas diferencias. Debe ser igual a
3.27
Encuentre una función
para la cual
3.28
Encuentre una función
cas?
para la cual
3.29
Continuando el problema anterior, encuentre una función tal que
3.30
Demuestre que
3.31
Demuestre que
3.32
Demuestre que
¿Puede usted encontrar dos funciones de tales característi­
www.elsolucionario.org
y que tenga
Polinomios factoriales
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el significado y la utilidad del polinomio factorial (Introducción).
2. Explicar con sus propias palabras la relación de los polinomios factoriales con los coeficientes
binomiales (Introducción).
3. Definir intuitivamente el concepto de interpolación (Introducción).
4. Definir intuitivamente el concepto de extrapolación (Introducción).
5. Conocer la mecánica para calcular factoriales (Problemas 4.23, 4.24).
6. Conocer la mecánica para calcular coeficientes binomiales (Problema 4.25).
7. Aplicar las fórmulas de recursividad simple y múltiple (Problemas 4.1 a 4.5, 4.27, 4.28).
8. Aplicar la fórmula de coeficientes binomiales para valores enteros (Problemas 4.5 a 4.8).
9. Aplicar la fórmula de coeficientes binomiales para valores fraccionarios (Problemas 4.8 a 4.11).
10.
Encontrar y aplicar los números de Stirling de primera clase (Problemas 4.12 a 4.17).
11. Encontrar y aplicar los números de Stirling de segunda clase (Problemas 4.18 a 4.21).
12. Construir tablas de diferencias a partir de datos tabulados, predecir datos faltantes, de acuerdo con
el grado del polinomio deseado, además de sugerir el grado del polinomio (Problemas 4.26, 4.35 a
4.38, Capítulos 3, 6, 7).
13. Expresar polinomios a partir de tabulaciones dadas (Problemas 4.29 a 4.34).
14. Encontrar una función, dada una fórmula de diferencia (Problemas 4.39 a 4.43).
APLICACIONES DE LOS POLINOMIOS FACTORIALES
Los polinomios factoriales son de mucha utilidad para la aplicación de las diferencias divididas finitas vistas
en el capítulo 3 y desde luego para interpolar, temas que se van a estudiar con mayor profundidad en capítulos
posteriores.
El buen manejo de los coeficientes binomiales, que a su vez están fuertemente relacionados con los polinomios factoriales, nos ayuda en la solución de problemas de probabilidad y estadística, para obtener permutaciones y combinaciones, así como éstas sirven de base para algunas funciones de probabilidad, tales como:
la distribución binomial, la distribución hipergeométrica, la distribución binomial negativa y la distribución
de Poisson. Dentro de los problemas complementarios, se incluye una aplicación de cada una de las distribu-
www.elsolucionario.org
POLINOMIOS FACTORIALES
55
ciones de probabilidad. Este capítulo está muy orientado hacia la comprensión y el dominio de la mecanización, ya que el concepto se empleará más adelante, a partir de los capítulos 5 y 6; en el capítulo 30 veremos aplicaciones orientadas hacia la Ingeniería Industrial, donde se tratan ejemplos de simulación y de muestreo, que
emplean distribuciones de probabilidad a partir de la generación de números aleatorios.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Manejo de funciones discretas
Diferencias finitas
Polinomios factoriales
Sumas (sumatorias)
Sumas y series
El polinomio de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equiespaciados
Interpolación por segmentos (splines)
Interpolación
Métodos de Monte Cario (números aleatorios)
www.elsolucionario.org
10
11
13
14
21
22
3
4
5
17
6
.7
8
9
12
30
56
MÉTODOS NUMÉRICOS
POLINOMIOS FACTORIALES
Los polinomios factoriales están definidos por
donde n es un entero positivo. Por ejemplo.
Estos polinomios desempeñan un papel central
en la teoría de las diferencias finitas debido a sus útiles propiedades. Las diversas diferencias de un polinomio fac­
torial son también polinomios factoriales. De modo más específico, para la primera diferencia,
que recuerda cómo responden las potencias de x a la diferenciación. Las diferencias de mayor orden se convierten entonces en polinomios factoriales de grado decreciente, hasta que finalmente
con todas las diferencias de mayor orden iguales a cero.
Los coeficientes binomiales se relacionan con los polinomios factoriales mediante
y en consecuencia comparten algunas de las propiedades de estos polinomios, siendo de las más importantes la
más famosa recursión
que tiene la forma de un fórmula de diferencia finita.
La recursión simple
se obtiene de la definición de polinomios factoriales. Reescribiéndola como
y puede usarse para extender la idea factorial sucesivamente a los enteros n - 0, - 1 , - 2 , . . . La forma básica
es, por tanto, verdadera para todos los enteros n.
NÚMEROS DE STIRLING
Los números de Stíriing del primer tipo aparecen cuando los polinomios factoriales se expresan en la forma polinomial estándar. Así
www.elsolucionario.org
POLINOMIOS FACTORIALES
57
ASÍ
siendo
lo que hace
los números de Stirling. Como por ejemplo
. La fórmula de recursión
permite la rápida tabulación de los números de Stirling.
Los números de Stirling de segundo tipo aparecen cuando las potencias de k se representan como combinaciones de polinomios factoríaies. De tal modo
siendo las
por lo que
los números de Stirling. Como ejemplo,
. La fórmula de recursión
permite la tabulación rápida de estos números. Un teorema básico establece que cada potencia de k puede tener
sólo una de tales representaciones como una combinación de polinomios factoríaies. Esto asegura la determinación única de los números de Stirling de segundo tipo.
REPRESENTACIÓN DE POLINOMIOS ARBITRARIOS
La representación de polinomios arbitrarios o cualesquiera como combinaciones de polinomios factoriales es
el siguiente paso natural. Cada potencia de k se representa de ese modo y entonces se combinan los resultados.
La representación es única debido al teorema básico que acaba de mencionarse. Por ejemplo,
Las diferencias de un polinomio arbitrario se determinan adecuadamente expresando ese polinomio como
combinaciones de polinomios factoriales y obteniendo las diferencias de cada uno de los factores en que se ha
descompuesto ese polinomio, mediante la aplicación de nuestra fórmula.
El teorema principal del capítulo está ahora a la mano, y establece que la diferencia de un polinomio de gra­
do n es otro polinomio de grado n - 1 . Esto hace que la diferencia n-ósima de tal polinomio sea una constante, y
cero las diferencias de orden mayor.
www.elsolucionario.org
58
MÉTODOS NUMÉRICOS
Problemas resueltos
4.1
Considere la función especial para la cual
Este mismo resultado se da en forma tabular, para los primeros valores enteros de k, en la tabla 4.1.
4.2
Generalizando el problema 4.1, considere la función especial
(Nótese que el índice superior no es una potencia.) Pruebe que, para
un resultado que se asemeja en gran medida al teorema de la derivada de la potencia n-ésima de una fun­
ción.
Tabla 4.1
4.3
Demuestre que si
0
0
1
0
2
0
3
6
4
24
5
60
0
0
6
18
36
Entonces
El problema 4.2 puede aplicarse a
en lugar de
Las extensiones a diferencias de mayor orden proceden justo como en el caso de derivadas.
www.elsolucionario.org
POLINOMIOS FACTORIALES
4.4
Pruebe que
59
y
Después de n aplicaciones del problema 4.2 se obtiene el primer resultado. (El símbolo
puede in­
terpretarse como 1.) Como n! es una constante (independiente de k) todas sus diferencias son 0.
4.5
Los coeficientes binomiales son los enteros
Pruebe la fórmula recursiva
Usando polinomios factoriales y aplicando el problema 4.2,
la cual se transforma de inmediato en la expresión que se quería demostrar. Este famoso resultado ya se
había utilizado.
4.6
Utilice la recursión para los coeficientes binomiales para tabular estos números hasta
La primera columna de la tabla 4.2 produce
que se define igual a 1. La diagonal, donde
es 1 por
definición. Las otras entradas resultan de la recursión. La tabla se extiende fácilmente.
4.7
Muestre que si k es un entero positivo, entonces
define como
y
son para
[Para
el símbolo
Tabla 4.2
1
2
3
4
5
6
7
8
0
1
2
3
4
5
6
7
1
1
1
1
1
1
1
1
1
2
3
4
5
6
7
8
1
3
6
10
15
21
28
1
4
10
20
35
56
1
5
15
35
70
1
6
21
56
1
7
28
1
www.elsolucionario.org
8
8
1
se
60
MÉTODOS NUMÉRICOS
4.8
El símbolo del coeficiente binomial y el símbolo factorial se utilizan con frecuencia para k no entero. Calcule
4.9
La idea de factorial se ha extendido a índices superiores que no son enteros positivos. Se sigue de la
definición que cuando n es un entero positivo,
Reescribiendo esto como
y usándolo como una definición de
Con
para
demuestre que
el primer resultado es inmediato. Para el segundo encontramos sucesivamente
y así en adelante. Se indica una demostración inductiva pero se omitirán los detalles. Para
nes conviene definir
y aceptar las consecuencias.
4.10
Pruebe que
en ocasio­
para todos los enteros n.
Para n > 1, esto se ha probado en el problema 4.2. Para n - 1 y 0, es inmediato. Para n negativo, di­
gamos
Este resultado es análogo al hecho establecido en el teorema del cálculo
es también cierto para todos los enteros.
4.11
Encuentre
Por los problemas anteriores,
www.elsolucionario.org
entonces
POLINOMIOS FACTORIALES
4.12
61
Muestre que
Directamente de las definiciones:
4.13
Generalizando el problema 4.12 demuestre que en el desarrollo de un polinomio factorial a un polinomio
estándar
el coeficiente satisface la fórmula de recursión
Estos coeficientes se llaman números de Stirling del primer tipo.
Sustituyendo n por n + 1,
y usando el hecho de que
encontramos
Compare ahora los coeficientes de W en ambos lados. Ellos son
para i = 2, . . . , n. Deben notarse los casos especiales
coeficientes de
4.14
comparando los
Utilice las fórmulas del problema 4.13 para generar una breve tabla de números de Stirling del primer tipo.
La fórmula especial
conduce de inmediato a la columna uno de la tabla 4.3. Por ejem­
plo, puesto que
es claramente igual a 1,
y así sucesivamente. La otra fórmula especial llena la diagonal superior de la tabla con 1s. Nuestra recursión principal completa entonces la tabla. Por ejemplo,
www.elsolucionario.org
MÉTODOS NUMÉRICOS
62
y asi sucesivamente. Hasta n - 8 la tabla es como se muestra en seguida:
Tabla 4.3
1
2
3
4
5
6
7
8
4.15
1
2
1
-1
2
-6
24
-120
720
-5,040
1
-3
11
-50
274
-1,764
13,068
3
4
5
6
1
-6
35
-225
1,624
-13,132
1
-10
85
-735
6,769
1
-15
175
-1,960
1
-21
1
322
-28
7
8
1
Utilice la tabla 4.3 para desarrollar
Empleando el quinto renglón de la tabla,
4.16
Muestre que
Utilizando la tabla 4.3,
4.17
Como un preliminar necesario para el problema que sigue, pruebe que una potencia de k puede tener sólo
una representación como una combinación de polinomios factoriales.
Suponga que existen las dos representaciones para
La sustracción conduce a
Como el lado derecho es un polinomio y la variable k no puede ser cero, entonces los coeficientes de cada
término deben ser cero. Pero aparece sólo en el último término; por lo tanto su coeficiente debe ser cero
lo cual lleva a que:
debe ser igual a
Y entonces para el coeficiente de
se tiene que
Este razonamiento se sigue hasta llegar a
Esta prueba es típica de las pruebas de representación únicas que se necesitan con frecuencia en el
análisis numérico. El teorema análogo, según el cual dos polinomios no pueden tener valores idénticos sin
www.elsolucionario.org
63
POLINOMIOS FACTORIALES
tener también coeficientes idénticos, es un resultado clásico del álgebra y ya se ha utilizado en el problema
4.13.
4.18
Generalizando el problema 4.16, mostrar que las potencias de k pueden representarse como com­
binaciones de polinomios factoriales
y que los coeficientes satisfacen la recursión
Estos coeficientes se llaman números de
Stirling del segundo tipo.
Procederemos por inducción, habiendo ya establecido en el problema 4.16 la existencia de tales re­
presentaciones para valores de k pequeños. Supongamos
y después multiplicando por k obtenemos
por lo que
Ahora note que
Ésta es ya una representación de
terminándose la inducción, de manera que podemos escribir
Por el problema 4.17, los coeficientes de
para
cientes de
en las dos últimas líneas deben ser los mismos, por lo que
Los casos especiales
deben notarse, comparando los coefi­
4.19 Use las fórmulas del problema 4.18 para generar una breve tabla de los números de Stirling del segundo
tipo.
La fórmula especial
conduce de inmediato a una columna de la tabla 4.4, ya que es cla­
ramente 1. La otra fórmula especial produce la diagonal superior. Nuestra recursión principal completa en­
tonces la tabla. Por ejemplo.
y así sucesivamente. Hasta n - 8, la tabla se lee como sigue:
www.elsolucionario.org
64
MÉTODOS NUMÉRICOS
Tabla 4.4
2
3
4
5
6
7
8
1
3
7
15
31
63
127
1
6
25
90
301
966
1
10
65
350
1701
1
15
140
1050
1
21
266
1
28
1
1
1
2
3
4
5
6
7
8
4.20
Utilice la tabla 4.4 para desarrollar
en polinomios factoriales.
Usando el quinto renglón de la tabla,
4.21
Pruebe que las n-ésimas diferencias de un polinomio de grado n son iguales, siendo cero las diferencias de
mayor orden.
Considere el polinomio P(x) y tome sus valores para un conjunto discreto de puntos igualmente espa­
A menudo resulta conveniente tratar con un valor entero sustituto de k, que hemos utili­
ciados
zado con mucha frecuencia, relacionado con x por
donde h es la diferencia uniforme entre pun­
tos consecutivos x. Denote el valor de nuestro polinomio para el argumento k con el símbolo
Puesto que
el cambio de argumento es lineal, el polinomio tiene el mismo grado en términos tanto de x como de k, y po­
demos escribirlo como
El problema 4.18 muestra que cada potencia de k puede representarse como una combinación de polino­
como tal combinación.
mios factoriales, conduciendo a una representación del mismo
Aplicando el problema 4.2 y la propiedad de linealidad
y reaplicando el problema 4.2 se llega al final a
De modo que todas las diferencias n-ésimas
son este número. Ellas no varían con k y, en consecuencia, las diferencias de mayor orden son cero.
4.22
Suponiendo que los siguientes valores de
tres valores.
k
pertenecen a un polinomio de grado 4, calcule los siguientes
0
1
2
3
4
0
1
2
1
0
www.elsolucionario.org
5
6
7
65
POLINOMIOS FACTORIALES
Un polinomio de cuarto grado tiene cuartas diferencias constantes, de acuerdo con el problema 4.21.
Al calcular a partir de los datos proporcionados, obtenemos las entradas a la izquierda de la línea en la tabla 4.5.
Tabla 4.5
1
1
-1
0
-2
6
21
16
6
2
4
5
-1
o
-2
10
14
4
4
51
30
4
Suponiendo que las otras cuatro diferencias también son 4, conduce a los enteros a la derecha de la
línea con los cuales las entradas que faltan pueden predecirse:
Problemas suplementarios
4.23
Calcule los factoriales:
4.24
Calcule los factoriales:
4.25
Calcule los coeficientes binomiales:
4.26
Calcule las diferencias hasta de cuarto orden para estos valores de.
k
0
1
2
3
4
5
6
7
0
0
0
0
24
120
360
840
4.27
Aplique el problema 4.2 para expresar las primeras cuatro diferencias de
factoriales.
en términos de polinomios
4.28
Aplique el problema 4.3 para expresar las primeras cinco diferencias de
factoriales.
en términos de polinomios
4.29
Use la tabla 4.3 para expresar
4.30
Utilice la tabla 4.3 para expresar
4.31
Use la tabla 4.4 para expresar
4.32
Utilice la tabla 4.4 para expresar
como un polinomio convencional.
como un polinomio convencional.
como una combinación de polinomios factonales.
como una combinación de polinomios factoriales.
www.elsolucionario.org
66
MÉTODOS NUMÉRICOS
4.33
Use el resultado del problema anterior para obtener
en términos de polinomios factoriales. Después
aplique la tabla 4.3 para convertir el resultado en un polinomio convencional.
4.34
en términos de polinomios factoriales. Después
Use el resultado del problema 4.32 para obtener
aplique la tabla 4.3 para convertir ambos resultados en polinomios convencionales.
4.35
Suponiendo que los siguientes valores de
tes tres valores.
k
corresponden a un polinomio de grado 4, prediga los siguien­
0
1
2
3
4
1
-1
1
-1
1
5
6
7
4.36 Suponiendo que los siguientes valores de y* corresponden a un polinomio de grado 4, prediga los siguientes tres valores.
k
4.37
4.38
0
1
2
3
4
0
0
1
0
0
5
6
¿Cuál es el grado más bajo posible para un polinomio que toma estos valores?
0
1
2
3
4
5
0
3
8
15
24
35
¿Cuál es el grado más bajo3 posible para un polinomio que toma estos valores?
k
4.39
Encuentre una función
para la cual
4.40
Encuentre una función
para la cual
4.41
Encuentre una función
para la cual
4.42
Encuentre una función
para la cual
4.43
Encuentre una función
para la cual
0
1
2
3
4
5
0
1
1
1
1
0
www.elsolucionario.org
7
Sumas (sumatorias)
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el concepto de suma de una colección de números (Introducción).
2. Explicar la notación de suma (sumatoria), indicando sus partes; la sigma
valores extremos del subíndice y los sumandos.
el subíndice variable, los
3.
Demostrar que las sumas telescópicas son sumas de diferencias (Introducción, Problema 5.1).
4.
Demostrar la suma por partes aplicando la analogía de la integración por partes, vista en cursos de
cálculo (Introducción, Problema 5.4).
5. Evaluar series, aplicando integración por partes (Problema 5.7).
6. Evaluar sumas, en términos de números de Stirling (Problemas 5.2, 5.9, 5.19).
7. Aplicar sumas, en problemas sencillos de probabilidad (Problemas 5.6, 5.8, 5.16, 5.17).
8. Evaluar sumas, mediante integración finita (Problemas 5.2, 5.9 a 5.11, 5.13).
9. Evaluar sumas de coeficientes binomiales (Problema 5.12).
10. Evaluar sumas hasta infinito, para ejercitar la mecanización (Problemas 5.3, 5.5, 5.14 a 5.18, 5.20,
5.21).
11. Expresar integrales finitas en forma de sumas (Problemas 5.22, 5.23).
APLICACIONES DE LAS SUMAS (Sumatorias)
Este capítulo está muy orientado hacia la comprensión del concepto suma (sumatoria) y el dominio de la mecanización, ya que se empleará más adelante.
Una aplicación fundamental de la suma es el concepto dé integración, ya que se puede visualizar como la
suma de áreas muy pequeñas (infinitesimales), para calcular el área completa bajo la función.
Otra aplicación importante se encuentra en los modelos de aproximación polinomial mediante mínimos cuadrados y minimax, y aquellos modelos que si bien la técnica original no tiene ese nombre, por ejemplo, aproximación por funciones racionales o por funciones trigonométricas, emplea en algunos casos los conceptos
anteriores; estos temas se van a cubrir en los capítulos 21 al 24.
A partir de un análisis de regresión (mínimos cuadrados), se pueden encontrar coeficientes de varianza y
covarianza, para lo cual se utilizan nuevamente las sumas.
El concepto de suma de una colección de números es muy útil en las áreas de probabilidad y estadística,
para evaluar funciones, para obtener promedios y para modelos de análisis de varianza, tales como "cuadrados
www.elsolucionario.org
68
MÉTODOS NUMÉRICOS
latinos" y otros que tienen grandes apiicadones en ingeniería química; dentro de los problemas complementarios,
se encuentran dos ejemplos de análisis de varianza.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Manejo de fundones continuas
Integradón numérica
Aproximadón poiinomial por mínimos cuadrados
Aproximadón poiinomial por minimax
Aproximadón polinomial por fundones racionales
Aproximadón polinomial por fundones trigonométricas
Manejo de fundones discretas
¿Qué son los métodos numéricos?
Diferendas finitas
Polinomios factoriales
Sumas (sumatorias)
El polinomio de Newton
Sumas y series
Aproximadón polinomial por mínimos cuadrados
Aproximadón polinomial por minimax
Aproximadón polinomial por fundones racionales
Aproximadón polinomial por fundones trigonométricas
Aproximadón polinomial mediante interpoladón
Operadores y polinomios de colocación
Puntos no equidistantes
www.elsolucionario.org
14
21
22
23
24
1
3
4
5
6
17
21
22
23
24
7
8
SUMAS (SUMATORIAS)
69
SUMA
La suma es la operación inversa de la diferencia, como la integración es a la diferenciación. En el capítulo 17 apa­
rece un tratamiento detallado, pero en este capítulo se presentan dos resultados elementales.
1.
Las sumas telescópicas son sumas de diferencias, y tenemos el simple pero útil resultado
análogo a la integración de derivadas. Las sumas arbitrarias pueden convertirse en sumas telescópicas
pueda resolverse para la función yk. Entonces
siempre que la ecuación
La integración finita es el proceso con el que se obtiene yk de
donde , se conoce. A partir de ello se deduce claramente que
la integración finita y la suma son el mismo problema. Como en el cálculo integral, sin embargo, hay oca­
siones en las que las integrales finitas explícitas (que no incluyen
son útiles.
2.
La suma por partes es otro resultado fundamental del cálculo de sumas e implica la fórmula
que recuerda la correspondiente fórmula de la integración por partes.
La integración de esta fórmula comprende el intercambio de una suma por una suma (presumible­
mente) más simple. Si se conoce una de las
la fórmula sirve para determinar la otra.
Las seríes infinitas también pueden evaluarse en ciertos casos en los que las sumas responden a ios méto­
dos de las sumas telescópicas o de la suma por partes.
Problemas resueltos
5.1
Demuestre que
Éste es un resultado simple pero útil. Puesto que incluye la suma de diferencias, suele compararse
con un resultado análogo del cálculo que comprende la integración de una derivada. Observe primero que
www.elsolucionario.org
70
MÉTODOS NUMÉRICOS
que ilustra el tipo de sumas telescópicas que se incluyen. En general,
ocurriendo todos los demás valores de y tanto con signo más como con signo menos. La suma de diferen­
cias adyacentes produce la diferencia de dos entradas en el renglón de abajo.
Se cumplen resultados similares en cualquier parte de la tabla.
5.2
Pruebe que
Necesitamos una función para la cual
Esto es similar al problema de integración del cálculo.
En este simple ejemplo, podría encontrarse casi por intuición, pero aun así aplicamos un método que nos
permitirá también manejar problemas más difíciles. Primero sustituimos por una combinación de polino­
mios factoriales, empleando los números de Stirling.
Una función que tiene esta diferencia es
como puede verificarse fácilmente calculando
La obtención de y, a partir de Ay¡ se denomina integra­
ción finita. La semejanza con la integración de derivadas es evidente. Ahora reescribimos el resultado del
problema 5.1 como
5.3
y sustituimos para obtener
Evalúe la serie
Por un resultado a n t e r i o r P o r consiguiente, utilizando el problema 4.9 para ma­
nejar
La serie se define como lím
y es, en consecuencia, igual a 1.
www.elsolucionario.org
SUMAS (SUMATORIAS)
5.4
71
Considere dos funciones definidas para el mismo conjunto de puntos
teniendo valores
Demuestre que
Esto recibe el nombre de suma por partes y es análoga al resultado del cálculo.
La prueba se inicia con el resultado del problema 3.9, donde se ha hecho un ligero cambio.
Sumando de i= 0 hasta i=n=1,
y aplicando después el problema 5.1 a la primera suma de la derecha. Asi se obtiene el resultado requeri­
do.
5.5
Evalúe la serie
Puesto que
partes. Tome la suma finita
podemos
h
a
c
e
r
y aplicar l a suma por
La última suma es geométrica y responde a una fórmula elemental, haciendo
Puesto que
5.6
tienen limite cero, el valor de la serie infinita es lím
Se lanza una moneda hasta que cae la primera cara. Entonces se realiza una apuesta, igual a dólares si la
primera cara cae al
lanzamiento (un dólar si la cara se obtiene en el primer lanzamiento, dos
dólares si la primera cara se obtiene en el segundo lanzamiento, etc.). La teoría de probabilidades conduce
a la serie
para la apuesta promedio. Utilice el problema anterior para calcular esta serie.
www.elsolucionario.org
72
MÉTODOS NUMÉRICOS
Por el problema 5.5 con
5.7
- 2 dólares.
Aplique la suma por partes para evaluar la serie
Estableciendo
encontramos
y de ese modo
Las dos primeras sumas que quedan se evaluaron en el problema 5.5 y la segunda es geométrica. De tal
modo llegamos a
y dejando
5.8
alcanzamos finalmente lím
Se lanza una moneda hasta que se obtiene la primera cara. Se hace una apuesta, igual a
mera cara sale al
dólares si la pri­
lanzamiento. La teoría de probabilidades conduce a la s e r i e p a r a la
apuesta promedio. Evalúe la serie.
Por el problema 5.7 con
- 6 dólares.
Problemas suplementarios
5.9
Use la integración finita (como en el problema 5.2) para probar que
5.10
Evalúe
5.11
Muestre que
por integración finita.
usando integración finita. (Véase el problema 3.21.) Esto es, desde luego, la
suma geométrica del álgebra elemental.
5.12
Muestre que
5.13
Evalúe por integración finita:
5.14
Evalúe
www.elsolucionario.org
SUMAS (SUMATORIAS)
5.15
Evalúe
5.16
Altere el problema 5.8 para que la apuesta sea
73
Use el problema 5.15 para evaluar la apuesta promedio,
que es
5.17
Altere el problema 5.8 de modo que la apuesta sea +1 cuando / es par y -1 cuando es impar. La apuesta
promedio es
Evalúe la serie.
5.18
Evalúe
5.19
Evalúe
5.20
Evalúe
5.21
Evalúe
5.22
Exprese una integral finita de
5.23
Exprese una integral finita de
5.24
Demuestre que
5.25
Demuestre que
5.26
Demuestre el teorema siguiente:
en términos de los números de Stirling.
en la forma de una suma, evitando k - 0.
en la forma de una suma.
(Puede emplear el método del problema 5.2.)
(Puede emplear el método del problema 5.2.)
Si n es cualquier entero positivo y si
son conjuntos de números, entonces:
a)
(ai + b i ) = ( a 1 + b1) + (a 2 + b 2 ) + (a 3 + b3) + •••••••• + (an + bn)
(ai + bi) = (a1 + a2 + a3 + • • • +a n ) + (b1 + b2 + b3 + •••••• + b n ).
b)
para cualquier número c;
ca1 + ca 2 + ca3 + • • • • • +ca n
www.elsolucionario.org
74
MÉTODOS NUMÉRICOS
c)
(ai - bi) = (a1 - b1) + (a2 - b2) + (a3 - b3) + • • • + (an - bn)
(ai -bi) = (a1+a2 + a1 +• • • •+ a n )-(b 1 + b2 + b3) + • • • + bn)
www.elsolucionario.org
El polinomio de Newton
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Expresar matemáticamente el polinomio de colocación de Newton, en términos de diferencias
divididas (Introducción, Problemas 6.1 a 6.4).
2. Expresar matemáticamente el polinomio de colocación de Newton, en términos de polinomios
factoriales (Introducción, Problemas 6.1 a 6.4).
3. Obtener, dado un conjunto de puntos equidistantes, sus diferencias divididas y a partir de ellas,
encontrar un polinomio de colocación de Newton del grado que se le pida (Problemas 6.5,6.7 a
6.12).
4. Encontrar, dada una función f(x), un polinomio de colocación de Newton del grado que se le pida, en
los valores de la variable independiente que se proporcionen (Problemas 6.14 a 6.19).
5. Explicar con sus propias palabras el significado de interpolación (Introducción, Capítulo 12).
6. Explicar con sus propias palabras el significado de extrapolación (Introducción, Capítulo 12).
7. Explicar con sus propias palabras el significado de colocación polinomial y su relación con los
conceptos de interpolación y de aproximación (Introducción).
8. Demostrar que el polinomio de interpolación es único (Capítulo 2).
9. Mencionar y explicar tres ventajas del método de Newton de diferencias divididas (Introducción).
10. Mencionar y explicar tres desventajas del método de Newton de diferencias divididas (Introducción).
11. Derivar el polinomio de Newton de grado n-ésimo (Problema 6.13).
APLICACIONES DEL POLINOMIO DE NEWTON
En este capítulo encontraremos diversas aplicaciones de los polinomios de colocación (aproximación, interpolación) mediante el polinomio de Newton; ya que nos permite con simples restas, obtener una aproximación a
partir de una serie de puntos equidistantes (equiespaciados).
El significado de la palabra "colocación" es similar al de "aproximación" y al de "interpolación", tra­
tándose de este tema; ya que garantiza que el polinomio resultante tocará a la función original f(x) en los puntos muestreados que deben ser equidistantes para el caso del polinomio de Newton; esto significa que en los
se cumplen las igualdades siguientes:
Tradicionalmente la interpolación se ha empleado para obtener valores de funciones elementales (tri-
www.elsolucionario.org
76
MÉTODOS NUMÉRICOS
gonomótricas, hiperbólicas, logarítmicas, etc.) que han sido tabuladas para valores discretos de la variable independiente. En la actualidad los valores de las funciones elementales se generan mediante subrutinas estándar que
evalúan algún tipo de serie convergente.
Lo anterior significa que la interpolación está vigente en esta época de calculadoras y computadoras de altísima velocidad, ya que si la forma explícita de una función no se conoce y no se puede obtener por métodos analíticos, tendremos que trabajar con muestras o sea valores discretos de la función que son
conocidos o pueden calcularse.
La interpolación nos proporciona medios para obtener una simple función de aproximación que podrá fácilmente ser derivada, integrada, evaluada o bien lo que se requiera para obtener información acerca de la
función original cuya forma explícita no se conoce; asimismo si tenemos una función determinada, podremos
obtener un polinomio de aproximación, evaluando puntos equidistantes y a partir de ellos encontrar el polinomio requerido.
Se dice que la interpolación "es el arte de leer entre las líneas de una tabla". La extrapolación es obtener
valores fuera del intervalo, a partir de datos conocidos.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Manejo de funciones discretas
Diferencias finitas
Polinomios factoriales
Sumas (sumatorias)
Sumas y seríes
El polinomio de Newton
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equidistantes
Interpolación por segmentos (splines)
Interpolación
www.elsolucionario.org
2
10
11
21
22
3
4
5
17
6
21
22
7
8
9
12
EL POLINOMIO DE NEWTON
77
POLINOMIO ÚNICO DE INTERPOLACIÓN
que representan (n + 1) puntos de la
Supongamos que tenemos (n + 1) pares de datos
donde no se conoce la forma explícita de f(x).
gráfica de una función
Se asume que cada valor de la variable independiente
es diferente.
Deseamos aproximar f(x) mediante una función P(x) que sea fácilmente manipulable matemáticamente y
que pueda evaluarse en cualquier x - X dentro del intervalo / que contiene a las
Posteriormente el valor de P(x) se utiliza para aproximar f(x). Dado que tenemos (n + 1) valores de la fun­
ción y¡ para
podemos imponer n + 1 condiciones para determinar los coeficientes en la aproxi­
mación polinomial.
Esto significa que podemos determinar un polinomio
de grado máximo n, con los coeficientes determi­
nados por las n + 1 condiciones:
POLINOMIO DE INTERPOLACIÓN: Aquel polinomio P„(x) que se aproxima a f(x) sobre un intervalo
y que
satisface
Asuma que existe un polinomio
de la forma
que satisface las restric­
ciones impuestas Pn(xi)= yi para i= 0, 1
n, entonces podemos escribir las ecuaciones de restricción en
forma desarrollada:
Y a partir de ellas, podemos escribir los coeficientes de las ecuaciones de restricción en forma matriciai:
Estas ecuaciones simultáneas de restricción tienen una solución única ya que el determinante de la matriz de coe­
ficientes es diferente de cero; esta solución única nos dará valores para los coeficientes
con los
que construiremos un polinomio de la forma:
DETERMINANTE DE VANDERMONDE: Es el determinante de la matriz de coeficientes formada a partir de las
ecuaciones simultáneas de restricción.
En la práctica existen formas más convenientes de realizar la interpolación, que no requieren el manejo de matri­
ces; uno de los métodos más sencillos es mediante el polinomio de Newton que se verá a continuación,
para el caso de un polinomio de tercer grado:
Otra forma general del siguiente desarrollo se encuentra en los problemas 6.2 y 6.3. Dado un conjunto de
parejas de datos
que representan puntos de una función y = f (x), determine un
www.elsolucionario.org
78
MÉTODOS NUMÉRICOS
polinomio de grado máximo 3:
que se aproxime a y= f(x) en el intervalo [x0, x3] de tal manera que el polinomio P3(x) coincida con la función en
los puntos x 1 (para i = 0 , 1 , 2,3), tal que p 3 (xi) = y 1 (para j = 0 , 1 , 2, 3), donde h = x M - x i para j = 0 , 1 , 2).
Desarrollando P3(xi) = y¡ (para i = 0 , 1 , 2, 3), encontraremos las ecuaciones de restricción:
Sustituyendo la relación ( x j - x i ) = (j=i)h, para j > i
Formaremos un sistema de ecuaciones lineales no homogéneas, que además nos queda un sistema triangu­
lar inferior muy sencillo de resolver.
Co
c0 + c1h
c0 + c12h + c22hh
c0 + c13h + c23h2h + c33h2hh
= y0
= y1
= y2
= y3
c0 = y0
c 1 = (y 1 -c 0 )/h = ( y 1 - y 0 ) / h
c2 = (y2-c12h-c0) / 2h2 = ( y 2 - 2y1 + y 0 )/2/h 2
c3 = (y3 - c26/h2 - c13h - c0) / 6h3 = (y3 - 3y2 + 3y1 - y0) / 6h3
Ahora sustituiremos en el polinomio de tercer grado de Newton, los valores de los coeficientes c0, c1, c2, c3 median­
te los operadores delta, que se encuentran ampliamente explicados en el capítulo 7.
c0 = y0,
(x - x0)(x - x1)
y0(x - x 0 )
h
2h
2
A continuación se construye la tabla de diferencias diagonales:
x0
y0
c0 = y0
x1
y1
x2
y2
x3
y3
(x - x0)(x - x1)(x - x2)
6h
3
para k= 1,2,3
Algunas aplicaciones del polinomio de interpolación de Newton (que se debe emplear con puntos equidistantes),
se encuentran en los problemas 12.1,12.3,12.4,12.6,12.7,12.28,12.54.
El desarrollo del polinomio de Newton se puede hacer de la misma forma para grado n. (Véase el problema
6.13.)
VENTAJAS Y DESVENTAJAS DE LA INTERPOLACIÓN POR DIFERENCIAS D I V I D I D A S
VENTAJAS:
1) Se pueden incluir puntos adicionales a la fórmula de Newton, con sólo sumarle otro término.
2)
Se pueden quitar puntos de interpolación al final del intervalo, con sólo borrarlos de la fórmula.
www.elsolucionario.org
EL POLINOMIO DE NEWTON
79
3)
La tabla de diferencias divididas nos da un indicio del grado máximo del polinomio de interpolación reque­
rido para una precisión en particular. Por ejemplo, si un conjunto dado de puntos se puede representar
exactamente mediante un polinomio de grado n, significa que la columna de la n-ésima diferencia es
constante.
4)
Se pueden detectar errores aleatorios en los valores de la función, observando la tabla de diferencias divi­
didas, ya que si éstas se comportan de manera errática, el analista puede sospechar que la interpolación
no es correcta.
DESVENTAJAS:
1)
El método requiere que las abscisas xi para i = 0, 1
n sean equiespaciadas; lo cual se puede elimi­
nar empleando otro método de interpolación, como los que se encuentran en los capítulos posteriores; es­
pecialmente en el capítulo 8.
2)
Este polinomio no se puede adaptar a la interpolación inversa (Capitulo 12), excepto cuando se trata de
interpolación lineal.
3)
En el caso de que hubiera nuevos valores de las ordenadas yi para i = 0 , 1 , . . . , n, con el mismo conjunto
de abscisas xi para i = 0, 1
n, sería necesario calcular nuevas tablas de diferencias divididas para
cada conjunto de ordenadas.
LA FÓRMULA DE NEWTON
El polinomio de colocación puede expresarse en términos de diferencias finitas y polinomios factoriales. La
fórmula de la suma
se demuestra primero y conduce directamente a la fórmula de Newton para el polinomio de colocación, que pue­
de escribirse como
Una forma alternativa de la fórmula de Newton, en términos del argumento xk, puede obtenerse utilizando
xk=x0 + kh, y es
Los puntos de colocación son x0
preescritos y0
yn.
xn. En estos puntos (argumentos) nuestro polinomio toma los valores
Problemas resueltos
6.1
Pruebe que
www.elsolucionario.org
MÉTODOS NUMÉRICOS
80
e infiera resultados similares tales como
Esto es solamente un resultado preliminar con respecto a uno más general. El primer resultado es evi­
dente. Para el segundo, observando la tabla 6.1,
que conduce de inmediato al resultado que se quería. Note que esto expresa en términos de entradas en
la diagonal superior de la tabla 6.1. Note también que los cálculos casi idénticos producen
etc., expresando las entradas sobre la diagonal y2 en términos de aquellas en la diagonal superior. Por últi­
mo,
llevando rápidamente al tercer resultado requerido. Pueden escribirse expresiones similares para
etc., elevando simplemente el índice superior en cada
Tabla 6.1
x0
x1
x2
x3
X4
6.2
y0
y1
y2
y3
y4
Pruebe que para cualquier entero positivo
(Aquí
equivale simplemente a
La demostración se efectuará por inducción. Para k = 1, 2 y 3, véase el problema 6.1. Suponga que el
resultado es verdadero cuando k es algún entero particular p.
Entonces, como se sugirió en el problema anterior, la definición de nuestras diversas diferencias hace que
también sea verdadera. Encontramos ahora
www.elsolucionario.org
EL POLINOMIO DE NEWTON
81
El problema 4.5 se utilizó en el tercer paso. El índice de la suma puede cambiarse ahora de j a i si se de­
sea. De este modo nuestro resultado se establece cuando k es el entero p + 1, completándose la inducción.
6.3
Demuestre que el polinomio de grado n,
toma los valores pk = yk para
k=0,1
n. Ésta es la fórmula de Newton.
Note primero que cuando k es 0 sólo el término y0 aparece, siendo todos los demás cero. Cuando k
es 1 sólo aparecen los dos primeros términos a la derecha, y todos los demás son cero. Cuando k es 2 úni­
camente aparecen los tres primeros términos. De tal modo, empleando el problema 6.1,
y se indica la naturaleza de nuestra prueba. En general, si k es cualquier entero de 0 a n, entonces
cero para i > k. (Contendrá el factor k - k.) La suma se abrevia en la forma
será
y por el problema 6.2 esto se reduce a yk. En consecuencia, el polinomio de este problema toma los mismos
valores que nuestra función yk para los argumentos enteros k = 0
n. (El polinomio es, sin embargo, de­
finido para cualquier argumento k.)
6.4
Exprese el resultado del problema 6.3 en términos del argumento xk, donde xk = x0 + kh.
Observe primero que
y asi sucesivamente. Usando el símbolo p(xk) en vez de pk, encontramos ahora
que es la fórmula de Newton en su forma alternativa.
6.5
Encuentre el polinomio de grado tres que toma los cuatro valores listados en la columna yk de abajo en los
correspondientes puntos xk.
Las diversas diferencias necesarias aparecen en las columnas restantes de la tabla 6.2.
www.elsolucionario.org
82
MÉTODOS NUMÉRICOS
Tabla 6.2
Sustituyendo los números encerrados en círculo en sus respectivos lugares en la fórmula de Newton,
que puede simplificarse a
aunque en las aplicaciones es a menudo preferible la primera forma.
6.6
Exprese el polinomio del problema 6.5 en términos del argumento k.
Directamente del problema 6.3,
que es una forma conveniente para calcular los valores de pk y puede dejarse como está. Puede también
cambiarse:
6.7
Aplique la fórmula de Newton para encontrar un polinomio de cuarto grado o menor que tome los valores yk
de la tabla 6.3.
Las diferencias necesarias se encierran en círculos. Sustituyendo las entradas encerradas en círculo
en sus lugares en la fórmula de Newton,
que es también
Puesto que k = xk - 1, este resultado también puede escribirse como
www.elsolucionario.org
EL POLINOMIO DE NEWTON
83
Tabla 63
Problemas suplementarios
6.8
6.9
6.10
6.11
Encuentre un polinomio de grado cuatro que tome estos valores.
xk
2
4
6
8
10
yk
0
0
1
0
0
Encuentre un polinomio de grado dos que tome estos valores.
k = xk
0
1
2
3
4
5
6
7
yk
1
2
4
7
11
16
22
29
Encuentre un polinomio de grado tres que tome estos valores.
xk
3
4
5
6
yk
6
24
60
120
Encuentre un polinomio de grado cinco que tome estos valores.
k = xk
0
1
2
3
4
5
yk
0
0
1
1
0
0
www.elsolucionario.org
MÉTODOS NUMÉRICOS
84
6.12
Encuentre un polinomio cúbico que incluya estos valores.
k — xk
0
1
yk
1
2
2
4
3
4
5
8
15
26
(Véase también el problema 3.12.)
6.13
Expresando un polinomio de grado n en la forma
calcule
lleva a
Muestre después que el requerimiento
etc. Deduzca después
y sustituya estos números para obtener una vez más la fórmula de Newton.
6.14
Encuentre un polinomio cuadrático que coincida con y(x) - x4 en x - 0 , 1 , 2.
6.15
Encuentre un polinomio cúbico que coincida con y(x) ciones en x - 5.
6.16
¿Hay un polinomio de grado cuatro que coincida con y(x) -
6.17
¿Hay un polinomio de grado dos que coincida con y(x) -
6.18
Encuentre un polinomio de grado cuatro que coincida con
polinomio más grande que y(x), y dónde es menor?
6.19
Encuentre un polinomio de grado dos que coincida con y (x) fórmula de Newton?
6.20
Encuentre una solución de
para todos los enteros k con
www.elsolucionario.org
en x - 0, 1, 2, 3. Compare las dos fun­
en x = 0,1,2, 3,4?
¿Dónde es el
¿Por qué no se aplica la
Operadores y
polinomios de colocación
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras la utilidad de representar ciertas operaciones mediante
operadores (Introducción).
2. Explicar con sus propias palabras el funcionamiento y la utilidad del operador delta (Introducción,
Problemas 7.1 a 7.5, 7.32).
3. Explicar con sus propias palabras el funcionamiento y la utilidad del operador E (Introducción,
Problemas 7.1 a 7.5, 7.29, 7.49).
4.
Explicar con sus propias palabras el funcionamiento y la utilidad de la combinación lineal de
operadores (Introducción, Problema 7.30).
5. Explicar con sus propias palabras el funcionamiento y la utilidad del producto de operadores
(Introducción, Problemas 7.6, 7.7,7.31).
6. Explicar con sus propias palabras el funcionamiento y la utilidad de la igualdad de operadores
(Introducción, Problemas 7.1 a 7.5).
7. Explicar con sus propias palabras el funcionamiento y la utilidad de la inversión de operadores
(Introducción, Problema 7.27).
8. Explicar con sus propias palabras el funcionamiento y la utilidad de la identidad de operadores
(Introducción, Problemas 7.1 a 7.3).
9. Explicar con sus propias palabras el funcionamiento y la utilidad del operador de diferencia regresiva
(Introducción, Problemas 7.6 a 7.10,7.27).
10. Explicar con sus propias palabras el funcionamiento y la utilidad del operador de diferencia central
(Introducción. Problemas 7.11, 7.12, 7.28,7.31,7.51).
11. Explicar con sus propias palabras el funcionamiento y la utilidad del operador de promedios
(Introducción, Problemas 7.13, 7.50).
12. Explicar con sus propias palabras las seis diferentes fórmulas de expresar los polinomios de
colocación (aproximación) de Newton que aparecen en este capitulo y la utilidad de cada una
(Introducción).
13. Desarrollar y aplicar la fórmula regresiva de Newton (Introducción, Problemas 7.9, 7.10, 7.33 a 7.35).
14. Desarrollar y aplicar la fórmula progresiva de Gauss (Introducción, Problemas 7.14 a 7.16, 7.37, 7.40).
15. Desarrollar y aplicar la fórmula regresiva de Gauss (Introducción, Problemas 7.17,7.18,7.38,7.39,
7.41).
www.elsolucionario.org
86
MÉTODOS NUMÉRICOS
16. Desarrollar y aplicar la fórmula de Stirling (Introducción, Problemas 7.19 a 7.21, 7.42, 7.43).
17. Desarrollar y aplicar la fórmula de Everett (Introducción, Problemas 7.22, 7.23,7.44 a 7.46).
18. Desarrollar y aplicar la fórmula de Bessel (Introducción, Problemas 7.24 a 7.26, 7.47, 7.48).
APLICACIONES DE LOS OPERADORES Y DE LOS POLINOMIOS DE COLOCACIÓN
Fundamentalmente este capítulo nos proporciona elementos para poder operar los temas siguientes, ya que nos
plantea un gran panorama para representar los polinomios con los que vamos a aproximar (colocar) las
funciones complicadas con las que nos enfrentemos, o bien con aquellos conjuntos de datos muestreados que
tengamos que operar. Es ésta la razón por la cual también incluye un gran número de operadores que nos van
a facilitar el manejo de fórmulas complicadas que se encuentren a lo largo de este libro. Este capítulo está
muy orientado a reafirmar la comprensión del concepto de polinomio de colocación, pensándolo en la forma
general y al dominio de la mecanización, ya que se empleará profundamente en el capítulo 12.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Manejo de funciones discretas
Diferencias finitas
Polinomios factoriales
Sumas (sumatorías)
Sumas y series
El polinomio de Newton
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equidistantes
Interpolación por segmentos (splines)
Interpolación
www.elsolucionario.org
2
10
11
21
22
3
4
5
17
6
21
22
7
8
9
12
OPERADORES Y POLINOMIOS DE COLOCACIÓN
87
OPERADORES
Los operadores se utilizan aquí y en el análisis numérico, en particular para simplificar el desarrollo de
fórmulas complicadas. Algunas de las aplicaciones más interesantes se efectúan con un espíritu de optimismo, sin
demasiada atención a la precisión lógica, sometiéndose los resultados a una comprobación por medio de otros
métodos o a una verificación experimental.
Varias de las fórmulas que se deducirán en este capítulo son, en parte, de interés histórico, proporcionan
una visión de las prioridades numéricas en el pasado. Los nombres asociados, como los de Newton y Gauss, indi­
can su importancia en esos tiempos. Los cambios en el hardware de las computadoras han reducido su gama de
aplicación, un aspecto que se repetirá en el capítulo 12 donde se presentarán ciertas aplicaciones clásicas.
Los conceptos específicos de operador que se emplearán ahora son:
1. El operador
está definido por
Consideramos a A un operador el cual si yk es una entrada produce yk+1 - yk como salida, para todos los
valores de k a considerar.
La analogía entre operador y un algoritmo (como se describió en el capítulo 1) es aparente.
2.
El operador E está definido por
Eyk = yk+1
Aquí también la entrada para el operador es yk. La salida es yk+1.
Tanto
como
tienen la propiedad de linealidad, esto es,
donde C1 y C2 son cualesquiera constantes (independientes de k). Todos los operadores que se presenta­
rán tendrán esta propiedad.
3. Combinación lineal de operadores. Considere dos operadores, denominados L1 y L2, que producen sali­
das L1yk y L2yk a partir de la entrada yk. Entonces la suma de estos operadores se define como el operador
de salida L1yk + L2yk.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
88
Una definición similar presenta la diferencia de dos operadores.
En forma más general, si C1 y C2 son constantes (independientes de k) el operador C1L1, + C2L2 pro­
duce la salida C 1 L 1 y k + C 2 L 2 yk.
4.
C l L 1 y k + C2L2yk
C1L1 + C 2 L 2
yk
El producto de operadores L1 y L2 se define como el operador que produce la salida L1L2yk. Un diagrama
hará que esto sea más claro.
yk
L2
L2yk
L1
L1L2yk
El operador L1 se aplica a la salida producida por L2. El conjunto de las tres partes centrales representa al
operador L1L2.
Con la definición de producto, los números C1 y C2 anteriores también pueden pensarse como operado­
res. Por ejemplo, siendo C cualquier número, el operador C efectúa una multiplicación por el número C.
5.
Igualdad de operadores. Se dice que dos operadores L1 y L2 son iguales si ellos producen salidas idénti­
cas para todas las entradas a considerar. En símbolos,
LX = L2
si
Lxyk = L2yk
para todos los argumentos k a considerar. Con esta definición una comparación de salidas muestra de in­
mediato que para cualesquiera operadores L 1 L 2 y L3
L1 + (L 2 + L3) = (L1 + L 2 ) + L 3
L 1 (L 2 L 3 ) = (L 1 L 2 )L 3
L 1 (L 2 + L 3 ) = L 1 L 2 + L 1 L 3
pero la ley conmutativa de la multiplicación no siempre es válida:
Sin embargo, si alguno de los operadores es un número C, la igualdad es evidente al comparar las sali­
das
www.elsolucionario.org
OPERADORES Y POLINOMIOS DE COLOCACIÓN
6.
89
Operadores inversos. Para gran parte de los demás operadores que usaremos, la .conmutatividad tam­
bién será válida. Como un caso especial,
se denominan operadores inversos si
En tal caso utilizamos los símbolos
El operador 1 se conoce como operador de identidad y el fácil observar que con él
cualquier operador L.
7.
Entre algunas de las ecuaciones simples que relacionan
para
se encuentran:
Dos teoremas relacionados, ya demostrados antes por otros medios, aparecen como sigue en sím­
bolos de operadores:
8.
El operador de diferencia regresivo
está definido por
y consecuentemente es fácil verificar que
Se demuestra que la relación entre
y lleva al desarrollo
para enteros negativos k.
www.elsolucionario.org
90
MÉTODOS NUMÉRICOS
9.
El operador de diferencia central está definido por
Se deduce que
A pesar de los argumentos fraccionarios éste es un operador ampliamente usa­
do. Guarda una estrecha relación con el siguiente operador.
10.
El operador promedio se define
y es el principal mecanismo mediante el cual pueden eliminarse los argumentos fraccionarios de las ope­
raciones de diferencia central.
POLINOMIOS DE COLOCACIÓN
El polinomio de colocación puede ahora expresarse en una diversidad de formas alternativas, todas equiva­
lentes a la fórmula de Newton del capítulo 6, pero cada una de ellas apropiadas a situaciones un poco diferentes.
Analizaremos la siguiente, que encuentra aplicación al principio del capítulo 12.
1. Fórmula de diferencia regresiva de Newton
representa el polinomio de colocación que toma los valores
2.
para
La fórmula progresiva de Gauss puede obtenerse desarrollando la relación entre
si el polinomio es de grado par 2n y la colocación está en
si el polinomio es de grado impar 2n + 1 y la colocación está en k = -n
3.
y se lee
Se convierte en
n + 1.
La fórmula regresiva de Gauss puede obtenerse de manera similar. Para grado par toma la forma
con la colocación también en k = - n
n. Una utilización importante de las dos fórmulas de Gauss co­
rresponde a la deducción de la fórmula de Stirling.
www.elsolucionario.org
OPERADORES Y POLINOMIOS DE COLOCACIÓN
4.
La fórmula de Stirling es una de las formas de mayor aplicación del polinomio de colocación. Se lee
y es una fórmula muy popular. Está por demás decir que la colocación es en k = -n
5.
91
n.
La fórmula de Everett toma la forma
y puede obtenerse al reacomodar los ingredientes de la fórmula progresiva de Gauss de grado impar. La
colocación es en k = -n
n + 1 . Note que sólo aparecen las diferencias par.
6.
La fórmula de Bessel es un reacomodo de la de Everett y puede escribirse como
Problemas resueltos
7.1
Demuestre que
Por definición de
y por definición de 1 +
Cuando tienen salidas idénticas para todos los argumentos k, los operadores
sultado también puede expresarse como
7.2
son iguales. Este re­
Pruebe que
y
La igualdad de salidas establece que los operadores son iguales. Éste es un ejemplo en el que es válida la
ley conmutativa de la multiplicación.
www.elsolucionario.org
92
7.3
MÉTODOS NUMÉRICOS
Demuestre que
Utilizando diversas propiedades del operador,
(E - 1)(E - 1) = E2 - 1 • E - E • 1 + 1 = E2 - 2E + 1
7.4
Aplique el teorema del binomio para demostrar
El teorema del binomio
es válido siempre que a y b (y por tanto a + b)
muten en la multiplicación. En la situación presente estos elementos serán E y -1 y ellos conmutan. De tal
manera,
Notando que Ey0 - y1, E2y0 = y2, etc., tenemos finalmente
que reproduce el resultado del problema 3.5.
7.5
Pruebe
Puesto que
el teorema del binomio
dor a y0, y utilizando el hecho de que
que lo anterior reproduce el problema 6.2.
7 . 6 L a diferencia regresiva está definida
Demuestre que
p r o d u c e A p l i c a n d o este opera­
se produce de inmediato el resultado que se quería. Note
p
o
r
E
s claro que ella asigna u n nuevo símbolo a
Puesto que estas expresiones son válidas para todos los argumentos k, tenemos
Usando el símbolo
para el operador definido por
vemos que
son am­
bos
En el lenguaje de los operadores son inversos:
Por último, como un ejercicio con
los cálculos con operadores,
7.7
Las diferencias regresivas normalmente se aplican sólo en la parte inferior de una tabla, usando k argumen­
tos negativos como se muestra en la tabla 7.1. Utilizando símbolos
etc. pruebe
que
www.elsolucionario.org
OPERADORES Y POLINOMIOS DE COLOCACIÓN
Puesto que
tenemos
cha pueden reacomodarse en la forma
93
Pero
conmutan, de modo que los factores 2n a la dere­
Aplicando esto a
Tabla 7.1
7.8
Pruebe que
y que en general para k un entero negativo,
+
Tomando directamente el caso general:
aplica el teorema del binomio, haciendo
Con k un entero negativo se
Para k = - 1 , -2, -3 se obtienen los casos especiales.
7.9 Pruebe que el polinomio de grado n que tiene los valores definidos por la siguiente fórmula se reduce a pk=
yk cuando k = 0,-1
-n. (Ésta es la fórmula de la diferencia regresiva de Newton.)
La prueba es muy similar a la del problema 6.3. Cuando k es 0, sólo aparece el primer término en el
lado derecho. Cuando
sólo los dos primeros términos intervienen, siendo todos los demás cero. En
www.elsolucionario.org
94
MÉTODOS NUMÉRICOS
general, si k es cualquier entero de 0 a -n, entonces k(k + 1) • • • (k + / - 1) será 0 para / > -k. La suma se
simplifica a
y por el problema 7.8 esto se reduce a
nuestra función para
7.10
El polinomio de este problema concuerda, por consiguiente, con
Encuentre el polinomio de grado tres que toma los cuatro valores listados como
rrespondientes argumentos
en la tabla 7.2 en los co­
Las diferencias necesarias aparecen en las columnas restantes de la tabla 7.2.
Tabla 7.2
-3
4
1
-2
6
3
2
3
5
-1
8
0
10
8
Sustituyendo los números dentro de los círculos en sus lugares en la fórmula de diferencia regresiva
de Newton,
Note que excepto para los argumentos k estos datos son los mismos que los del problema 6.5. Eliminando
la fórmula encontrada en ese problema
k mediante la relación
se obtiene otra vez. Las dos fórmulas de Newton son simplemente reacomodos del mismo polinomio. Des­
pués de esto se obtendrán otros reacomodos.
7.11
El operador de diferencia central
sucesivamente. Observe que
De la definición de
que se quería.
está definido por
son inversos y
y así
q u e D e m u e s t r e que
tenemos
Aplicado a
www.elsolucionario.org
esto produce el resultado
95
OPERADORES Y POLINOMIOS DE COLOCACIÓN
7.12
En la notación 6, la tabla de diferencias usual puede reescríbirse como en la tabla 7.3.
Tabla 7.3
-2
-1
0
1
2
Exprese
utilizando el operador
Por el problema 7.11,
7.13
E l operador promedio
mente. Demuestre que
Primero calculamos
7.14
está definido por
por l o q
u
e
y así sucesiva­
Después
Compruebe lo siguiente para los valores dados de k:
k = 0,1
k = -1,0,1
k = - 1 , 0 , 1,2
k=-2, - 1 , 0 , 1,2
Para k = 0 sólo interviene el término y0 de la derecha. Cuando k = 1 todo el lado derecho corresponde
al operador
lo cual produce
Para k - 1 las últimas tres fórmulas conducen a
www.elsolucionario.org
96
MÉTODOS NUMÉRICOS
lo que produce y-1. Cuando k - 2 las últimas dos fórmulas llevan a
produciendo y2. Por último, cuando k - -2 la última fórmula implica
conduciendo a y-2.
Las fórmulas de este problema se generalizan para formar la fórmula progresiva de Gauss. Ella
representa un polinomio cualquiera de grado 2n.
7.15
tomando los valores pk = yk para k = -n
n, o de grado 2n +1
tomando los valores pk= yk para
n + 1. (En casos especiales el grado puede ser más bajo.)
k=-n
Aplique la fórmula de Gauss con n - 2 para encontrar un polinomio de grado cuatro o menor que tome los
valores yk de la tabla 7.4.
Las diferencias necesarias se listan en la forma usual. Esto recuerda una función usada al ejemplificar
las dos fórmulas de Newton, con un cambio en el argumento k y un par de valores añadidos en la parte su­
perior. Puesto que la cuarta diferencia es 0 en este ejemplo, predecimos un polinomio de grado tres. Susti­
tuyendo las entradas encerradas en círculos en sus lugares respectivos en la fórmula de Gauss,
Si k se elimina utilizando la relación xk= 6 + 2k, el polinomio cúbico ya encontrado dos veces antes apare­
cerá de nuevo.
Tabla 7.4
-2
2
-2
-1
4
1
3
-1
2
0
6
1
8
8
7
12
2
10
4
20
www.elsolucionario.org
OPERADORES Y POLINOMIOS DE COLOCACIÓN
7.16
97
Aplique la fórmula progresiva de Gauss para encontrar un polinomio de grado cuarto o menor que tome los
valores yk de la tabla 7.5.
Las diferencias necesarias se encierran en círculos.
Tabla 7.5
-2
1
1
-1
2
-1
-2
4
2
0
3
1
4
-1
-8
4
2
2
5
1
Sustituyéndolas en sus respectivos lugares en la fórmula de Gauss,
que se simplifica en
Puesto que k = xk - 3, este resultado puede también escribirse como
concordando, desde luego, con el polinomio que se encontró antes con la fórmula de Newton.
7.17 Compruebe que, para k = - 1 , 0 , 1 ,
y para k - -2, - 1 , 0,1, 2,
Para k = 0, sólo contribuyen los términos y0 a la derecha. Cuando k = 1 ambas fórmulas implican el
operador
www.elsolucionario.org
98
MÉTODOS NUMÉRICOS
que produce y1. Para k = -1 ambas fórmulas implican
que produce y-1 Continuando con la segunda fórmula, encontramos, para k = 2,
y para k = -2,
como se requería.
Las fórmulas de este problema pueden generalizarse para formar la fórmula regresiva de Gauss. Ella
representa el mismo polinomio que la fórmula progresiva de Gauss de orden par y puede verificarse como
antes.
7.18
Pruebe
De las definiciones de los coeficientes binomiales,
como se requería.
7.19
Deduzca la fórmula de Stirling, dada a continuación, a partir de las fórmulas de Gauss.
Sumando término por término de grado 2n de las fórmulas de Gauss, dividiendo entre dos y utilizando
el problema 7.18,
Ésta es la fórmula de Stirling.
7.20
Aplique la fórmula de Stirling con n - 2 para encontrar un polinomio de grado cuarto o menor que tome los
valores yk en la tabla 7.6.
www.elsolucionario.org
OPERADORES Y POLINOMIOS DE COLOCACIÓN
99
Las diferencias necesarias se listan nuevamente. Sustituyendo las entradas dentro de círculos en sus
lugares respectivos en la fórmula de Stirilng,
la cual se observa fácilmente como un reacomodo menor del resultado encontrado por la fórmula progresiva de Gauss.
7.21
Demuestre
Tabla 7.6
El lado izquierdo se convierte en (utilizando el problema 4.5)
en cuyo último paso usamos
7.22
Deduzca la fórmula de Everett a partir de la fórmula progresiva de Gauss de grado impar.
Empleando el problema 7.21, tenemos de inmediato.
que es la fórmula de Everett. Puesto que es un rearreglo de la fórmula de Gauss es el mismo polinomio de
www.elsolucionario.org
100
MÉTODOS NUMÉRICOS
grado 2n +1, el cual satisface pk = yk para k =-n n + 1. Se trata de una fórmula ampliamente utilizada
debido a su simplicidad, incluyendo sólo diferencias par.
7.23 Aplique la fórmula de Everett con n - 2 para encontrar un polinomio de grado cinco o menor que tome los
valores yk de la tabla 7.7.
Las diferencias necesarias se encierran en círculos.
Tabla 7.7
Sustituyendo las entradas en círculo en sus lugares respectivos en la fórmula de Everett,
que puede simplificarse, usando xk = k + 2, para
7.24
Muestre que
El lado izquierdo corresponde al operador
El lado derecho corresponde al operador
por lo que ambos lados son iguales.
www.elsolucionario.org
OPERADORES Y POLINOMIOS DE COLOCACIÓN
7.25
101
Demuestre que la fórmula de Bessel es un acomodo de la fórmula de Everett.
La fórmula de Bessel es
Por el problema anterior ésta se reduce de inmediato a la fórmula de Everett.
7.26
Aplique la fórmula de Bessel con n - 1 para encontrar un polinomio de grado tres o menor que tome los
valores yk de la tabla 7.8.
Tabla 7.8
Las diferencias necesarias están encerradas en círculo y se han insertado en sus lugares respectivos en la
fórmula de Bessel. Está por demás decir que el polinomio resultante es el mismo que se ha encontrado con
otras fórmulas
Puede verificarse que éste es equivalente a resultados anteriores.
Problemas suplementarios
7.27
Demuestre que
7.28
Demuestre que
7.29
Demuestre que
7.30
Dos operadores
conmutan si
Muestre que
www.elsolucionario.org
' conmutan entre sí.
MÉTODOS NUMÉRICOS
7.31
Pruebe que
7.32
Pruebe que
7.33
Aplique la fórmula regresiva de Newton a los siguientes datos para obtener un polinomio de grado cuatro en
el argumento k:
Use después xk - k + 5 para convertirlo en un polinomio en xk. Compare el resultado final con el del proble­
ma 6.7.
7.34
Aplique la fórmula regresiva de Newton para encontrar un polinomio de grado tres que incluya los siguien­
tes pares xk, yk:
Empleando xk - k + 6, conviértalo en un polinomio en xk y compárelo con el resultado del problema 6.10.
7.35
Muestre que el cambio de argumento xk = x0 + kh convierte la fórmula regresiva de Newton en
7.36
Aplique el problema 7.35 a los datos del problema 7.34 para producir el polinomio cúbico directamente en el
argumento xk.
7.37
Aplique la fórmula progresiva de Gauss a los datos que siguen y compare el resultado con el del proble­
ma 6.8.
7.38
Aplique la fórmula regresiva de Gauss a los datos del problema 7.34.
7.39
Aplique la fórmula regresiva de Gauss a los datos del problema 7.34, con el argumento k cambiado de
manera que k = 0 en x - 6.
www.elsolucionario.org
103
OPERADORES Y POLINOMIOS DE COLOCACIÓN
7.40
7.41
Aplique la fórmula progresiva de Gauss a los datos que siguen y compare el resultado con el del problema 6.11.
k
-2
-1
0
1
2
3
xk
0
1
2
3
4
5
yk
0
0
1
1
0
0
Verifique que para
y que para
Éstas también pueden considerarse formas de la fórmula regresiva de Gauss, siendo impar en vez de par el
grado de estos polinomios.
7.42
Aplique la fórmula de Stirling a los datos del problema 7.37.
7.43
Aplique la fórmula de Stirling a los datos del problema 6.9. Elija cualesquiera de tres argumentos igual­
mente espaciados y deje que ellos correspondan a k = - 1 , 0 , 1 .
7.44
Aplique la fórmula de Everett a los datos del problema 7.34 pero con el par central de argumentos como k 0 y 1.
7.45
Aplique la fórmula de Everett a los datos del problema 7.40
7.46
Aplique la fórmula de Everett a los datos del problema 6.9.
7.47
Aplique la fórmula de Bessel a los datos del problema 7.44.
7.48
Aplique la fórmula de Bessel a los datos del problema 7.40.
7.49
Pruebe que
7.50
Muestre que
7.51
Pruebe que
www.elsolucionario.org
Puntos no equidistantes
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras qué caminos podemos tomar cuando tenemos un conjunto de datos
no equidistantes, para aproximarlos a un polinomio (Introducción).
2. Explicar las desventajas e inconvenientes de aproximar mediante un polinomio un conjunto de datos
no equidistantes (Introducción).
3. Expresar con sus propias palabras cinco ventajas y cinco desventajas de la interpolación por el
método de Lagrange (Introducción).
4. Desarrollar las fórmulas de la interpolación por el método de Lagrange y aplicarlas en problemas de
ejemplo (Introducción, Problemas 8.1 a 8.5,8.15 a 8.22).
5. Expresar con sus propias palabras cinco ventajas y cinco desventajas de la interpolación por el
método del polinomio único de interpolación (Introducción).
6. Expresar con sus propias palabras cinco ventajas y cinco desventajas de la interpolación por el
método de diferencias divididas (Introducción, Capitulo 6).
7. Desarrollar las fórmulas de la interpolación por el método de diferencias divididas y aplicarlas en
problemas de ejemplo (Introducción, Problemas 8.6 a 8.14, 8.23 a 8.26, 8.31 a 8.33).
8. Desarrollar las fórmulas de la interpolación por el método de Newton para puntos no
equiespaciados y aplicarlas en problemas de ejemplo (Introducción, Problemas 8.13, 8.14, 8.27 a
8.29).
9. Expresar con sus propias palabras cinco ventajas y cinco desventajas de la interpolación lineal
iterativa (método de Aitken-Neville) (Introducción).
10. Desarrollar las fórmulas de la interpolación por el método de Stirling y de Bessel para puntos no
equiespaciados y aplicarlas en problemas de ejemplo (Introducción, problema 8.30).
APLICACIONES DE LA INTERPOLACIÓN CON PUNTOS EQUIDISTANTES
Como hemos visto a partir del capítulo 2, podemos aproximar el comportamiento de una secuencia de datos mediante una función o polinomio de aproximación. A los métodos que veremos en este capítulo, se les llama métodos de interpoiación, algunos autores les llaman métodos de colocación, debido a que sólo garantizan que la
función original y el polinomio de aproximación (en este caso interpolación o colocación) son iguales en los puntos muestreados y no nos dicen nada al respecto de la primera derivada del polinomio ni de la función, ni tampoco
en derivadas de órdenes superiores.
www.elsolucionario.org
PUNTOS NO EQUIDISTANTES
105
En la teoría del capitulo 2, demostramos que si existe un polinomio de interpolación, éste es el único que vamos a utilizar ahora, al emplear argumentos no equidistantes.
En el capitulo 3 aprendimos a manejar mecánicamente el método de diferencias divididas (diferencias finitas), cuya teoría veremos con mayor amplitud en éste.
Dentro del capítulo 6 también aprendimos el manejo del polinomio de Newton y en éste haremos una generalización muy útil para capítulos posteriores.
En este tema veremos que el polinomio único de interpolación se puede representar en otras formas explícitas.
La gran utilidad de tener métodos de interpolación para puntos no equidistantes, es que en la vida real
no siempre es posible obtener un muestreo de datos muy estricto debido a que en algunos casos es excesivamente costoso mantener el control; en otros casos debido al experimento que se esté conduciendo será necesario desechar ciertas lecturas que no garanticen apego a la realidad o bien que se sospeche algún sesgo.
El muestreo de datos es una herramienta muy utilizada para generar estadísticas en diversas áreas, por
ejemplo: ventas dentro de una empresa, cualquier tipo de costos, cantidad de productos aceptados o rechazados
en el área de producción, número de vehículos o personas que ingresan a algún lugar por unidad de tiempo, número de personas que consumen determinado artículo, datos para determinar curvas de oferta o de demanda y en
general siempre que deseemos conocer un polinomio a partir de los datos tomados o generados por funciones
más complicadas.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Manejo de funciones discretas
Diferencias divididas
Polinomios factoriales
Sumas (sumatorías)
Sumas y seríes
El polinomio de Newton
Aproximación polinomial mediante interpolación
El polinomio de Newton
Operadores y polinomios de colocación
Puntos no equidistantes
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Integrales simples con puntos de singularidad
www.elsolucionario.org
2
10
11
13
14
3
4
5
17
6
6
7
8
9
12
13
14
15
16
106
MÉTODOS NUMÉRICOS
PUNTOS NO EQUIDISTANTES
El polinomio de colocación para puntos no equidistantes x0
xn
puede encontrarse de diversas maneras. En
este capítulo se presentarán los métodos de Lagrange, de determinantes y de diferencias divididas,
1.
La fórmula de Lagrange es
donde
es la función multiplicadora de Lagrange
que tiene las propiedades
La fórmula de Lagrange representa al polinomio de colocación, esto es, p(xk) = yk para k = 0 , . . . , n. La fun­
ción
puede usarse para expresar la función multiplicadora de Lagrange en una forma más compacta
La función estrechamente relacionada
conduce a una segunda representación compacta de la función multiplicadora de Lagrange,
2.
Una forma determinante del polinomio de colocación p(x) es
www.elsolucionario.org
PUNTOS NO EQUIDISTANTES
107
puesto que p(xk) = yk para k = 0 , . . . . n. Esta forma se emplea ocasionalmente, sobre todo en trabajos teóri­
cos.
3.
La primera diferencia dividida entre x0 y x1 se define como
aplicándose una fórmula similar entre otro par de argumentos.
De tal modo, las diferencias divididas mayores se definen en términos de diferencias divididas menores. Por ejemplo,
es una segunda diferencia, en tanto que
es una n-ésima diferencia. En múltiples formas estas diferencias desempeñan un papel equivalente al de las dife­
rencias más simples que se utilizaron antes.
Una tabla de diferencias vuelve a ser un medio conveniente para representar diferencias, siendo utilizada la
forma diagonal estándar.
y0
y1
y2
y3
y4
y(x 0 ,
x1
y(x 1 , x 2 )
y ( x 2 , x3)
y ( x 3 , x4)
y(x0,x1,x2)
y(x1,x2,x3)
y ( x 2 , x 3 , x4)
y(x 0 , x1, x 2 , x 3 )
y(x1, x2, x3, x4)
y ( x 0 , x1, x2, x 3 , x4)
El teorema de representación
muestra cómo cada diferencia dividida puede presentarse como una combinación de valores yk. Esto debe compa­
rarse con un teorema correspondiente al capitulo 3.
La propiedad de simetría de diferencias divididas establece que tales diferencias son invariables bajo todas
las permutaciones de los argumentos xk, siempre que los valores yk se permuten de la misma manera. Este resul­
tado es muy útil y es una consecuencia natural del teorema de representación.
Las diferencias divididas y las derivadas se relacionan por medio de
www.elsolucionario.org
108
MÉTODOS NUMÉRICOS
En el caso de puntos igualmente espaciados, las diferencias divididas se reducen a diferencias finitas ordinarias; específicamente,
Una útil propiedad de las diferencias finitas ordinarias puede obtenerse en esta forma, a saber,
Paría una función y(x) con derivadas acotadas, todas las
duce que, para h pequeño,
teniendo una cota independiente de n, se de­
para n creciente. Esto generaliza el resultado encontrado antes para polinomios y explica por qué con frecuencia
las diferencias más altas en la tabla tienden a cero.
El polinomio de colocación puede obtenerse ahora en términos de diferencias divididas. El resultado clásico
es la fórmula de diferencias divididas de Newton,
sin que se requiera que los argumentos o puntos
tengan igual espaciamiento. Esto generaliza la fórmula de
Newton del capítulo 6, y en el caso de igual espaciamiento se reduce a ella.
aún está dado por la tórmula
El error y(x) - p(x), donde y(x) y p(x) se colocan en los argumentos
obtenida antes,
puesto que todavía estamos analizando el mismo polinomio de colocación p(x). Una forma alternativa de este
error, usando diferencias divididas, es
y(x)-p(x) = y(x 1 x0, . . . ,
xn)(x-x0)
•••(x-xn)
Problemas resueltos
8.1
¿Qué valores toma la función multiplicadora de Lagrange
cuando
www.elsolucionario.org
109
PUNTOS NO EQUIDISTANTES
Note primero que los factores del numerador garantizan que Li(xk) - 0 para
y de ese modo los
factores del denominador garantizan que Li(xi) - 1.
8.2
Compruebe el polinomio
toma el valor yk en el argumento xk, para k = 0, . . . , n. Ésta es la
fórmula de Lagrange para el polinomio de colocación.
por lo que la fórmula de Lagrange proporciona el
8.3
Con π(x) definida como el producto
muestre que
Puesto que
es el producto de n + 1 factores, el proceso usual de diferenciación produce
mo la suma de n + 1 términos, en cada uno de los cuales se ha diferenciado un factor. Si definimos
de modo que sea igual a
co­
excepto por el factor x - xk que se omite, entonces
Pero entonces en x = xk todos los términos son cero excepto Fk(xk), puesto que éste es el único término que
no contiene x - xk. De tal modo que
y
8.4
Muestre que la ecuación de determinante
brinda el polinomio de colocación p(x).
Desarrollando este determinante por menores del primer renglón, se producirá claramente un polino­
mio de grado n. Sustituyendo x = xk y p(x) - yk produce que dos renglones sean idénticos de tal modo que el
www.elsolucionario.org
MÉTODOS NUMÉRICOS
110
determinante es cero. En consecuencia, p(xk) = yk y este polinomio es el polinomio de colocación. A pesar
de ser tan atractivo, este resultado no se utiliza mucho debido a la dificultad de evaluar determinantes de
gran tamaño.
8.5
Encuentre un polinomio de tercer grado que toma los valores que a continuación se señalan.
xk
0
1
2
4
yk
1
1
2
5
El polinomio puede escribirse directamente.
p(x)=
(x-1)(x-2)(x-4)
x(x-2)(x-4)
x(x - 1 ) ( x - 4)
x(x-l)(x-2)
1+
2+
5
1+
2(2-l)(2-4)
(0-l)(0-2)(0-4)
1(1 - 2)(1 - 4)
4(4-l)(4-2)
Puede arreglarse como
8.6
Calcule las diferencias divididas hasta el tercero de los valores yk en la tabla 8.1.
Las diferencias se listan en las tres últimas columnas.
Tabla 8.1
Por ejemplo,
8.7
Pruebe que y(x0, x t ) = y(x1 x0). Esto se denomina simetría de la primera diferencia dividida.
Esto resulta evidente de la definición, pero también puede observarse partiendo del hecho de que
www.elsolucionario.org
PUNTOS NO EQUIDISTANTES
111
puesto que al intercambiar x0 con x1 y y0 con y1 se invierte simplemente el orden de los dos términos a la de­
recha. Ahora este procedimiento puede aplicarse a diferencias más altas.
8.8
Pruebe que y(x0, x1, x2) es simétrica.
Reescríbase esta diferencia como
y(x0,x1x2) =
y(x 1 ,x 2 ) y(x 0 , x1
x2 - x0
y0
(x0-x1)(x0-x2)
1
x2 - x0
y2-y1
x2-x1
y1
(x1-x0)(x1-x2)
y1-y0
x1 - x0
y2
(x2-x0)(x2-x1)
Intercambiando cualesquiera dos argumentos xj y xk y los valores y correspondientes sólo se intercambian
en estas condiciones los términos yj y yk a la derecha, dejando que el resultado no sufra cambio. Puesto
que cualquier permutación de los argumentos xk puede ser afectada por intercambios sucesivos de pares,
la diferencia dividida es invariante bajo las permutaciones (tanto de los números xk como de los yk).
8.9
Pruebe que, para cualquier entero positivo n.
Esto generaliza el resultado de los dos
donde
problemas previos.
La prueba es por inducción. Ya tenemos este resultado para n = 1 y 2. Supongámoslo cierto para
n = k. Entonces por definición,
Puesto que hemos supuesto verdadero nuestro resultado para diferencias de orden k, el coeficiente de yk a
la derecha, para i = 1, 2
k, será
1
1
xk+1 - x0) (xi - x 1 )
1
(xi - xk + l )
(xi - x0)
(xi - x k )
donde se entiende que el factor (xl - xi) no se incluye en los productos del denominador. Pero este coefi­
ciente se reduce a
como se quería. Para i = 0 o i = k + 1 el coeficiente de yi queda de una pieza en vez de dos, pero en ambos
casos se observa fácilmente que será el que exige el teorema con n = k + 1, esto es,
1
(x0-x1)
1
(x0 - xk+1)
(xk+1 - x0)
Lo anterior completa la inducción y prueba el teorema.
www.elsolucionario.org
(xk+1 - xk)
112
8.10
MÉTODOS NUMÉRICOS
Pruebe que la n-ésima diferencia dividida es simétrica.
Esto se desprende de inmediato a partir del problema anterior. Si cualquier par de argumentos se in­
tercambia, digamos x¡ y xk, los términos que incluyen a yi, y a yk a la derecha se intercambian y no hay nin­
gún otro cambio.
8.11
Evalúe unas cuantas de las primeras diferencias de y(x) = x2 y x 3 .
Considere primero y(x) - x2. Entonces
Las diferencias de mayor orden claramente serán 0. Tomemos ahora y(x) - x3.
De nuevo las diferencias de mayor orden son claramente cero. Note que en ambos casos todas las diferen­
cias son polinomios simétricos.
8.12
Demuestre que la k-ésima diferencia dividida de un polinomio de grado n es un polinomio de grado n - k si
y es cero si k > n.
Defínase el polinomio p(x). Una diferencia dividida típica es
Considerando a x0 como fija y a x1 como el argumento, las diferentes partes de esta fórmula pueden verse
como funciones de x1. En particular, el numerador es un polinomio en x1 de grado n, con un cero en x1 = x0.
Por el teorema del factor el numerador contiene a x1 - x0 como un factor y por consiguiente el cociente, que
es p(x0, x1), es un polinomio en x1 de grado n - 1. Por la simetría de p(x0, x1) es también, en consecuencia,
un polinomio en x0 de grado n - 1. El mismo argumento puede repetirse ahora. Una segunda diferencia típi­
ca es
Considerando a x0 y x1 fijos y a x2 como argumento, el numerador es un polinomio en x2, de grado n - 1 ,
con un cero en x2 = x0. Por el teorema del factor p(x0, x1, x2) es, por tanto, un polinomio en x2 de grado n - 2.
Por la simetría de p(x0, x1, x2) es también un polinomio en x0 o en x1 nuevamente de grado n - 2. Continuan­
do en esta forma se llega al resultado que se requiere. Se requiere una inducción para completar la prueba,
pero este caso es sencillo y se omitirán los detalles.
www.elsolucionario.org
PUNTOS NO EQUIDISTANTES
8.13
113
Pruebe que la fórmula de diferencias divididas de Newton
p(x) = y0 + (x-x0) y (x0, x1) + (x-x0)(x-x1) y (x0, x1, x2)
+ • • • + (x - x0)(x-x1) • • • (x-xn-1) • • • (x-xn-1) y (x0, • • •, xn)
representa el polinomio de colocación. Esto es, toma los valores p(xk) = yk para k - 0
n.
El hecho de que p(x0) - y0 es evidente. A continuación, de la definición de diferencias divididas, y utili­
zando la simetría,
yk = y0 + (xk-x0) y (x0,xk)
y (x0, xk) = y (x0, x1) + (xk-x1) y (x0 ,x1, xk)
y (x0, x1, xk) = y (x0, x1, x2) + (xk-x2) y (x0, x1, x2, xk)
y(x0, • • •, xn-2, xk) = y (x0, • • •, xn-1) + (xk-xn-1) y (x0, • • • , xn-1, xk)
Por ejemplo, la segunda línea se deriva de
y(x0, x1, xk) = y (x1, x0, xk) =
y(x0, xk)
y(x1, x0)
xK - x1
Para k - 1 la primera de éstas prueba que p(x1) - y1. Sustituyendo la segunda en la primera se obtiene
yk = y0 + (xk-x0) y (x0, x1) + (xk-x0)(xk-x1) y (x0, x1, xk)
la cual para k - 2 prueba que p(x2) - y2. Las sustituciones sucesivas verifican que p(xk) - yk para cada xk co­
rrespondiente hasta que finalmente llegamos a
y n = y 0 + (x n -x 0 )y(x 0 , x 1 ) + (xn - x 0 ) ( x n -x 1 )y(x 0 , x 1 ,x 2 )
+ • • • + (x n -x 0 )(x n - x 1 ) • • • (x n - x n - 1 ) y (x 0 , • • • , x n-1 , x n )
que demuestra que p(xn) - yn.
Puesto que esta fórmula representa el mismo polinomio que la fórmula de Lagrange, cada una de
ellas es sólo un acomodo de la otra.
8.14
Encuentre un polinomio de tercer grado que tome los valores de la tabla 8.1.
Empleando la fórmula de Newton, que incluye las diferencias en la diagonal superior de la tabla 8.1,
p(x) = 1 + (x - 0)0 + (x - 0)(X - 1)
que se simplifica en
fórmula de Lagrange.
(x - 0)(x - 1)(X - 2)
1
12
y que corresponde al mismo resultado encontrado con la
www.elsolucionario.org
114
MÉTODOS NUMÉRICOS
Problemas suplementarios
8.15
Use la fórmula de Lagrange para producir un polinomio cúbico que incluya los siguientes pares de números
xk, yk. Evalúe después este polinomio en x = 2, 3, 5.
xk
0
1
4
6
yk
1
-1
1
-1
8.16
Use la fórmula de Lagrange para generar un polinomio de cuarto grado que incluya los siguientes pares de
números xk, yk. Evalúe después el polinomio en x = 3.
8.17
Deduzca la fórmula de Lagrange determinando los coeficientes ai en el desarrollo de fracciones parciales
[Multiplique ambos lados por x - x, y permita que x se acerque a xi en el límite, recordando que p(xi) = yi en
la colocación.] El resultado es
8.18
Aplique el problema 8.17 para expresar
como una suma de fracciones parciales
[Sugerencia. Considere el denominador como
para algunos x0, x1, x2 y después encuentre los corres­
pondientes y0, y1 y2. Esto equivale a considerar p(k) como el polinomio de colocación.]
8.19
Exprese
8.20
Demuestre que
como una suma de fracciones parciales.
L0(x) = 1 +
x-x0
x0-x1
(x-x0) (x-x1)
(x0-x1) (x0-x2)
(x-x0) • • • (x-xn-1)
(x0-x1) • • • (x0-xn)
Pueden escribirse desarrollos similares por simetría para los demás coeficientes.
www.elsolucionario.org
115
PUNTOS NO EQUIDISTANTES
8.21
Escriba la fórmula de Lagrange de tres puntos para los argumentos
límite cuando tiende a 0. Muestre que
y después considere el
Esto determina un polinomio cuadrático en términos de y(x0), y'(x0) y y(x1).
8.22
Proceda como en el problema anterior, empezando con la fórmula de Lagrange para argumentos x0, x0 +
para representar un polinomio cúbico en términos de y(x0), y'(x0), y(x1). y'(x1).
8.23
Calcule las diferencias divididas hasta de tercer grado para los pares xk, yk:
Xk
0
1
4
6
yk
1
-1
1
-1
8.24
Encuentre el polinomio de colocación de tercer grado para los pares xk, yk del problema 8.23. Use la fórmula
de Newton. Compare el resultado con el obtenido mediante la fórmula de Lagrange.
8.25
Reacomode los pares de números del problema 8.23 como sigue:
xk
4
1
6
0
yk
1
-1
-1
1
Calcule otra vez la tercera diferencia dividida. Debe ser el mismo número que antes, ilustrando la propiedad
de simetría.
8.26
Calcule la cuarta diferencia dividida para los siguientes valores yk:
8.27
Aplique la fórmula de Newton para encontrar el polinomio de colocación para los datos del problema 8.26.
¿Qué valor toma este polinomio en x = 3?
8.28
Muestre que
www.elsolucionario.org
116
8.29
MÉTODOS NUMÉRICOS
Para y(x) = (x - x0)(x - x1,) • • • (x - xn) = π(x), pruebe que
y (x0, x1, • • • xp) = 0
8.30
para p = 0, 1,• • • ,n
y (x0, x1, • • • xn, x) = l
para todas las X
y(x0, x1, • • • xn, x, z) = 0
para todas las x , z
Muestre que
P(x) = y0
y(x1,x0)+y(x0,x-1)
(x - x 0 ) + y(x 1 x 0 , x -1 )(x - x 0 )
2
y(x2,x1,x0,x-1)
y(x 1 x 0 , x-1 x - 2 )
(x-x1)(x-x0)(x-x-1)
2
+ y(x 2 , x 1 x 0 ,x - 1 , x - 2 )(x - X 0 ) ( X -x - 1 )(x -x - 1 )
es otra manera de escribir el polinomio de colocación, verificando que
P(x k )=y k para k = - 2 , - 1 , 0, 1, 2
Ésta es una generalización de la fórmula de Stirling para puntos no equidistantes. Puede ser ampliada a un
grado mayor y también es factible generalizar la fórmula de Bessel y otras fórmulas.
8.31
Muestre que para argumentos que son igualmente espaciados, por lo que xk+1 -xk=h, tenemos
8.32
Las diferencias divididas con dos o más argumentos iguales pueden definirse mediante procesos de límite.
Por ejemplo, y(x0, x0) puede definirse con el lím y(x, x0), donde el lím x = x0. Esto implica que
Compruebe esto directamente cuando
mostrando que en este
lim
Compruébelo también directamente cuando
este caso
www.elsolucionario.org
c
a
s o p o r lo que el
mostrando primero que en
PUNTOS NO EQUIDISTANTES
8.33
117
En la segunda diferencia dividida
puede verse que el lado derecho tiene la f o r m a c o n
definimos
considerada una constante. Si el lím
Esto implica que
Compruebe esto directamente cuando
mostrando primero que en este caso
en tanto que
www.elsolucionario.org
Interpolación por
segmentos (splines)
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras qué caminos podemos tomar cuando tenemos una secuencia de
datos equidistantes o no equidistantes, para aproximarlos mediante interpolación por segmentos
(Introducción, Capítulos 3, 6, 8,10,11,12).
2. Explicar con sus propias palabras a partir de qué conceptos surge el concepto de interpolación por
segmentos (Introducción).
3.
Expresar con sus propias palabras cinco ventajas y cinco desventajas del uso de interpolación por
segmentos en comparación con otros métodos de interpolación (Introducción).
4. Aplicar la interpolación por segmentos en problemas con datos equidistantes y no equidistantes
(Problemas 9.7, 9.11, 9.18, 9.23).
5. Obtener segmentos de interpolación e imponerles el requisito de que pasen a través de los nodos
apropiados, para determinar las constantes de integración (Introducción, Problemas 9.1 a 9.3, 9.22).
6. Asegurar la continuidad de una interpolación por segmentos en la primera derivada (Introducción,
Problemas 9.4 a 9.6, 9.24, 9.25).
7. Encontrar segmentos cúbicos de interpolación para una función determinada, en un intervalo
(Problemas 9.7, 9.8, 9.18 a 9.20).
8. Obtener segmentos de interpolación e imponerles el requisito de que pasen a través de los nodos
apropiados, para determinar las constantes de integración, omitiendo ciertos segmentos, de acuerdo
con las necesidades del problema en particular (Introducción, Problemas 9.9 a 9.11, 9.21, 9.23).
9. Estimar el error de una aproximación por segmentos (Problemas 9.12, 9.13).
10. Estimar qué tan bien se aproxima la primera derivada de una función, mediante la interpolación por
segmentos (Problemas 9.12 a 9.17).
APLICACIONES DE LA INTERPOLACIÓN POR SEGMENTOS
Como se podrá ver en el capítulo 8, la interpolación es una herramienta muy útil dentro de muy diversas disciplinas; el concepto de interpolación por segmentos (spiines) podría decirse que es una aplicación muy sofisticada de la interpolación, ya que en lugar de emplear sólo un polinomio de aproximación que pudiera ser de alto
grado, se emplean varios polinomios conjuntados, debido a que se crea un polinomio de bajo grado entre cada
uno de los puntos de la muestra, además de que se reducen los picos.
www.elsolucionario.org
INTERPOLACIÓN POR SEGMENTOS {SPUNES)
119
Otra ventaja muy importante es que al emplear polinomios de bajo grado evitamos posibles oscilaciones que
ocurrirían con polinomios de alto grado.
Como en todos los casos de aproximación polinomial, una vez que tenemos la aproximación adecuada,
podemos derivarla, integrarla, evaluarla, conocer su comportamiento, obtener sus raíces y en general emplearla
para hacer cualquier tipo de operaciones que necesitemos.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Manejo de funciones discretas
Diferencias finitas
Polinomios factoriales
Sumas (sumatorias)
2
10
11
13
14
3
4
5
Sumas y series
17
El polinomio de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equidistantes
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Casos especiales de integración numérica
6
7
8
9
12
. .
www.elsolucionario.org
. . .
13
14
15
16
120
MÉTODOS NUMÉRICOS
INTERPOLACIÓN SEGMENTARIA
En lugar de usar un solo polinomio, presumiblemente de alto grado, para representar una función dada so­
bre un intervalo para alcanzar la precisión requerida, podemos unir varios segmentos de polinomio, cada uno de
ellos de bajo grado. El ejemplo clásico es, desde luego, un conjunto de segmentos de línea, en donde cada uno
de ellos corresponde a los datos proporcionados sobre un subintervalo. Tal aproximación es continua pero tiene
una primera derivada con discontinuidades en los extremos del intervalo, las esquinas (Fig. 9-1). Ésta es la base
para las interpolaciones elementales en las tablas y para la regla trapezoidal en la integración numérica. La supo­
sición implícita de que entre los puntos dato la función dada es casi lineal, puede ser razonable si los puntos están
lo suficientemente cercanos.
Fig. 9-1 Una interpolación segmentaria primitiva.
En el capítulo 14 ajustaremos segmentos parabólicos (polinomios cuadráticos) en conjunto para desarrollar
la regla de Simpson para la integración numérica. Se darán también otros ejemplos usando polinomios de grado li­
geramente mayor. En todos estos casos habrá esquinas donde se unan los segmentos.
Consideraremos ahora un método en el que segmentos cúbicos se reconstruyen de manera tal que las es­
quinas se redondean, siendo continuas tanto la primera como la segunda derivada de la aproximación. Los poli­
nomios de alto grado tienen característica oscilatoria. Uno de grado n puede tener tantos como n - 1 puntos de
retorno. Cuando un polinomio de tales características representa con precisión una función dada, ello suele ser
por una oscilación regresiva y progresiva a través de la función. Esto tiene efectos colaterales indeseables como
una pobre aproximación de la derivada, por mencionar sólo uno. La aproximación por interpolación segmentaria
que se obtendrá ahora, evita dichas oscilaciones porque está compuesta de segmentos de bajo grado. El término
interpolación segmentaria se omite en el instrumento de dibujo del mismo nombre, una tira flexible que se usa en
el dibujo de curvas.
Dado un intervalo (a, b)= 1 dividido en n subintervalos por los puntos x0= a, x1 x2 ..............xn=b, un segmento
cúbico se ajustará a cada subintervalo, tomando valores específicos y, en los puntos xi con la primera y segunda
derivadas en subintervalos adyacentes que concuerdan en valor con la unión. Los puntos x, a xn-1 se llaman los
nodos, o nudos, de la interpolación segmentaria (Fig. 9-2). Los detalles del desarrollo de estos segmentos de in­
terpolación se tratarán en los problemas resueltos, y se brindarán ejemplos.
segmentos cúbicos
nudo
continuas)
y¡
Fig. 9-2
x0
x¡
www.elsolucionario.org
x„
INTERPOLACIÓN POR SEGMENTOS (SPUNES)
121
Problemas resueltos
9.1
Un polinomio de tercer grado, cúbico, tiene cuatro coeficientes. Es una representación común
Con las convenciones de la figura 9.2, los n segmentos cúbicos juntos implicarán 4/7 coeficientes. ¿Cómo
se compara lo anterior con el número de condiciones que se imponen a la interpolación segmentaría?
El punto es que ordinariamente esperaríamos que 4n coeficientes fueran determinados por 4n condi­
ciones. Aquí tenemos que cumplir cuatro condiciones en los nudos x1 a xn-1 es decir, el segmento en cual­
quiera de los lados debe alcanzar este punto, y las primeras dos derivadas tienen que concordar. Esto se
convierte en 4n - 4 condiciones. En los dos puntos extremos sólo nos interesa la colocación, dos condicio­
nes más, haciendo un gran total de 4n - 2. La interpolación segmentaria no está, entonces, definida com­
pletamente por las especificaciones dadas. Restan dos grados de libertad. Algunas veces éstos se usan
para hacer cero la segunda derivada en los puntos extremos, conduciendo a lo que se conoce como la in­
terpolación segmentaría natural. De manera alternativa es posible requerir que los segmentos extremo co­
rrespondan con los valores de la derivada en el extremo de la función dada, si éstos pueden conocerse o
aproximarse. Puede además explorarse una tercera opción, relativa a la reducción de las especificaciones
en los nudos x1 y xn-1.
9.2
Sean los subintervalos de la figura 9.2 /1 a /n, de modo que /i=(xi-l, x i ). Defínase también hi=xi- xl-1
notando que los subintervalos no necesitan ser del mismo largo. Si Si (x) es el segmento de interpolación
en /1, muestre que
para constantes
Sobre el segmento de interpolación es cúbico, por lo que su primera derivada será cuadrática y la
segunda derivada lineal. Sólo queda comprobar la continuidad en cada nudo para
El
segmento
toca este nudo en su extremo derecho en tanto que
lo toca en su extremo izquierdo. Las
derivadas requeridas son por tanto
y
reduciéndose ambas a C. La continuidad está asegurada y descubrimos que las constantes C son de he­
cho ios valores comunes de las segundas derivadas de la interpolación segmentaria.
9.3
Integre dos veces el resultado del problema precedente para obtener los segmentos de interpolación e im­
ponga después el requerimiento de que esos segmentos pasen a través de los nudos apropiados para
determinar la constante de integración.
Con las dos integraciones se obtiene
www.elsolucionario.org
122
MÉTODOS NUMÉRICOS
siendo los dos últimos términos la función lineal presentada por las constantes de integración. Para la colo­
cación en los nudos, debemos tener S,(xi-1)= yi-1 y Si(xi)= yi. Estas condiciones fijan ci y di y conducen a
como puede verificarse insertando xi-1 y xi.
9.4
Resta asegurar la continuidad de las primeras derivadas. Para ello, diferencie el resultado del problema
anterior y compare los valores adyacentes como en el problema 9.2.
Diferenciando
por lo que las derivadas requeridas en el nudo xk son
y
Puesto que éstas son ¡guales, tenemos, para k = 1
n-1,
que es un sistema lineal de n - 1 ecuaciones para las constantes C0 a Cn. Como se observó antes, el siste­
ma no está determinado. Nos faltan dos ecuaciones.
Hay una manera interesante de incluir dos ecuaciones adicionales en el sistema lineal, manteniendo
nuestras opciones abiertas y preservando el carácter general de la matriz. Primero dejemos que
para i = 1 , . . . , n - 1. El sistema puede entonces reescribirse, aun para i = 1
Tomando ahora dos condiciones adicionales en la forma
www.elsolucionario.org
n - 1, como
INTERPOLACIÓN POR SEGMENTOS (SPUNES)
con
123
a nuestra disposición. El sistema combinado toma, por tanto, la forma:
La matriz coeficiente es diagonal triple, con todos los demás elementos iguales a cero.
9.5
¿Cómo puede usarse el sistema lineal del problema anterior para encontrar una interpolación segmentaria
natural?
como cero. Las ecuaciones superiores e inferiores obligan entonces a que C0 y Cn
Elija
sean también cero y esto es lo que identifica a la interpolación segmentaría natural. El sistema se reduce al
orden n -1 determinando las restantes C1 a Cn-1.
9.6
En forma similar, ¿cómo podemos arreglar las condiciones que deben cumplirse en los extremos?
Omitiendo las fórmulas apropiadas del problema 9.4, tenemos
y
que se convierten fácilmente en
y
Comparando ahora con la primera y última ecuaciones del sistema lineal, es decir
2Cn = dn, se sugieren las elecciones
que proporcionarán, en efecto, los valores extremos requeridos.
www.elsolucionario.org
124
9.7
MÉTODOS NUMÉRICOS
Ajuste segmentos de interpolación cúbicos a la función f(x) - sen x en el intervalo
puntos interiores
Use sólo los dos
El conjunto de datos correspondiente es
con i = 0
3 y todas las
Son tres los segmentos cúbicos que deben encontrarse. Los valores
uniformes h i producen de inmediato que
sean iguales a E n consecuencia,
con el mismo resultado para d2. Esto nos lleva a las ecuaciones
y al tema de las condiciones de los extremos. La interpolación segmentaria natural es en verdad apropiada
en este caso debido a que la función seno tiene segundas derivadas cero en los puntos extremos. Así que
ajustamos C0 y C3 a cero. El sistema restante rápidamente produce
La sustitución en
las fórmulas del problema 9.3 da como resultado los segmentos de interpolación, que después de simplifi­
caciones son:
El problema 9.19 pide que se verifiquen estos segmentos cúbicos revisando todas las condiciones que se
imponen sobre los mismos. La simplicidad del ejemplo ha permitido manejar valores exactos a lo largo de
todo el proceso. Note también que el segmento "cúbico" central es en realidad cuadrático.
9.8
Ajuste de nuevo segmentos cúbicos para lá función seno, pidiendo esta vez que las primeras derivadas en
los puntos extremos sean iguales a las derivadas del seno.
Las nuevas condiciones en los puntos extremos son
encontramos
www.elsolucionario.org
A partir del problema 9.6
INTERPOLACIÓN POR SEGMENTOS (SPLINES)
125
así que el nuevo sistema lineal es
y tiene esta solución
Sustituyendo en las fórmulas S,(x) del problema 9.3, tenemos otra vez los segmentos cúbicos. La verifica­
ción de que estos segmentos cumplen todas las funciones que se imponen sobre ellos se plantea en el pro­
no son cero.
blema 9.20, donde además puede encontrarse que los valores extremos de
9.9
Una tercera manera de obtener un sistema bien determinado para la aproximación por interpolación seg­
mentaria es relajar un poco nuestros requerimientos. Por ejemplo, omitiendo los segmentos S1(x) y Sn(x),
podemos pedir que S2(x) y Sn-1,(x) se hagan cargo de las colocaciones de los puntos extremos. Esto elimina
además los requerimientos de continuidad en x1 y xn-1, que ya no son nudos. Muestre que el problema
resultante tendrá tantas condiciones que satisfacer como coeficientes disponibles para cumplirlas.
Ahora habrá n - 2 segmentos cúbicos en lugar de n, con 4 n - 8 coeficientes disponibles. Pero sólo
habrá n - 3 y no n - 1 nudos. Con cuatro requerimientos por nudo, deben satisfacerse 4 n - 1 2 condiciones.
Puesto que también se requiere la colocación en x0, x1, xn-1, y xn, el conteo de condiciones asciende a 4n - 8.
9.10
Modifique los desarrollos en los problemas 9.2 y 9.4 para satisfacer los requerimientos que se sugieren en
el problema 9.9.
Una cuidadosa relectura de los problemas mencionados mostrará que puede ahorrarse mucho. Las n - 3
ecuaciones centrales de nuestro sistema lineal, como se presentaron en el problema 9.4, aún son válidas
porque ellas se refieren a los nudos x2 a xn-2 en donde no se han hecho cambios. Éstas ya proporcionan n - 3
ecuaciones para los n - 1 coeficientes C1 a Cn-1. Las otras dos ecuaciones necesarias harán que S2(x0) = y0
y Sn-1(xn) = yn. Regresando a la fórmula de Si(x) dada en el problema 9.3, estas condiciones pueden poner­
se en práctica. Después de algunos manejos algebraicos puede inducirse que tomarán la forma
con las siguientes definiciones:
www.elsolucionario.org
126
MÉTODOS NUMÉRICOS
La forma final del sistema es por consiguiente
de nuevo diagonal triple, con todos los demás elementos iguales a cero.
9.11
en el intervalo
Aplique el método que acaba de desarrollarse a
riores igualmente espaciados.
usando tres puntos inte­
Hay cuatro subintervalos, con segmentos de interpolación que se encontrarán para los dos interiores.
El único nudo estará en
Esto aclara por qué no continuamos el ejemplo anterior, el cual tenía un in­
tervalo menos. No habría nudos y un solo segmento cúbico interpolaría los cuatro puntos dados. El conjun­
to de datos presente es
con todos los
Las fórmulas p a r a s e aplican ahora sólo en el nudo x2 y producen
y consecuentemente la única ecuación
Encontramos además
Regresando a las fórmulas más recientes,
y
www.elsolucionario.org
INTERPOLACIÓN POR SEGMENTOS (SPLINES)
127
por lo que nuestro sistema lineal es el siguiente:
Resolviendo, y recurriendo otra vez al problema 9.3, llegamos a estos dos segmentos de interpolación:
Con un poco de paciencia puede comprobarse que S2 une los primeros tres puntos, S3 los últimos tres y
que ellos forman un nudo apropiado en x2. Esto es todo lo que se requirió. Dividendos tales como
o
habrían sido convenientes, pero no hay razón para ser tan ambiciosos. Tendrán que ha­
cerse las aproximaciones 1.05 y -1.09.
9.12
¿Cuál es el error en la aproximación por interpolación segmentaria?
Puede mostrarse que
donde H es el mayor de los hi y los máximos están en el intervalo /.
9.13
Aplique la cota de error del problema 9.12 a la interpolación segmentaria del problema 9.7.
La cuarta derivada de sen x está acotada, desde luego, por
9.14
De tal modo
¿Qué tan bien se aproxima una interpolación segmentaria a la derivada
Puede demostrarse que
9.15
Aplique la fórmula del problema 9.14 a la interpolación segmentaria del problema 9.12.
Encontramos
aproximadamente. Hablando en general, las interpolaciones segmentarias
son aproximaciones bastante buenas para las derivadas.
www.elsolucionario.org
128
MÉTODOS NUMÉRICOS
9.16
¿Qué se entiende cuando se dice que una interpolación segmentaria es una aproximación global a f(x)?
Los segmentos de la interpolación no se determinan independientemente unos de otros. Cada uno
está enlazado con todos los demás. El conjunto de coeficientes C, que identifica los segmentos está deter­
minado por un sistema lineal. En contraste, podría ajustarse un polinomio cúbico para los primeros cuatro
puntos, x0 a x3, después otro correspondiente al grupo x3 a x6 y asi sucesivamente a través del intervalo /.
Cada segmento tendría que encontrarse entonces en forma independiente de los otros, pero las propieda­
des de continuidad de la interpolación segmentaria en los nudos es casi seguro que estaría ausente.
9.17
Muestre que la interpolación segmentaria natural en (a, b) minimiza singularmente
entre todas las fundones f(x) que tienen segundas derivadas continuas y que satisfacen f(x1) = y, en los nu­
dos. Observe primero que
con S(x) la interpolación segmentaria cúbica. La integración por partes sobre cada subintervalo convierte la
última integral en la forma siguiente:
Los últimos dos términos desaparecen puesto que f(x) es igual a Si(x) en los nudos y Si(4)(x) es cero. Su­
mando lo que está a la izquierda para i = 1
n hay cancelación de todos los valores interiores dejando
que también se hace cero puesto que S es la interpolación segmentaria natural. Observe que este residuo
aún se haría cero si supiéramos alternativamente que
concuerdan en los puntos extremos. En cual­
quier caso, reordenando un poco la ecuación original,
que hace la primera integral más pequeña que la segunda.
9.18
Ajuste una interpolación segmentaria cúbica a estos datos.
xi
0
2
2.5
3
3.5
4
4.5
5
6
yi
0
2.9
3.5
3.8
3.5
3.5
3.5
2.6
0
www.elsolucionario.org
129
INTERPOLACIÓN POR SEGMENTOS {SPLINES)
Eligiendo la interpolación segmentaria natural, el sistema del problema 9.4 proporciona siete ecuaciones para las siete C, interiores. Su solución, redondeada hasta dos lugares, es como sigue:
i
1
2
3
4
5
Ci
-.23
-.72
-4.08
2.65
.69
6
7
-5.40
-.70
Una gráfica con los nueve puntos dato y los segmentos de interpolación aparece en la figura 9.3. Recordan­
do que las C, son los valores de la segunda derivada en los puntos dato, con C0 y C8 iguales a cero, es tran­
quilizador observar su comportamiento a través del intervalo, en particular los grandes valores que más o
menos se esperaban.
Fig. 9-3
Problemas suplementarios
9.19
Compruebe que la interpolación segmentaria del problema 9.7 cumple con todas las condiciones que se le
imponen.
9.20
Compruebe que el primer segmento cúbico en el problema 9.8 es
y encuentre los otros dos segmentos. Verifique que cumplen los requerimientos impuestos sobre ellos.
9.21
Verifique los detalles dados en el problema 9.10.
www.elsolucionario.org
130
9.22
MÉTODOS NUMÉRICOS
Encuentre la interpolación segmentaria natural que pasa a través de los siguientes puntos:
xi
0
1
2
3
4
yi
0
0
1
0
0
9.23
Aplique el procedimiento del problema 9.10 a los datos anteriores, encontrando una interpolación de dos
segmentos en los dos subintervalos centrales. El único nudo estará en x = 2, pero la interpolación debe, por
supuesto, pasar también a través de los dos puntos extremos.
9.24
El caso en el que todos los puntos dato caen en una línea recta es uno que difícilmente requiere una
interpolación segmentaria, pero vale la pena un momento de reflexión al respecto. Recuerde que las cons­
tantes C¡ son los valores de la segunda derivada y en este caso deben ser todas cero. ¿Cómo logra esto
nuestro sistema lineal?
9.25
¿Qué sucede con nuestro sistema lineal si todos los puntos dato caen sobre una parábola?
www.elsolucionario.org
Polinomios osculadores
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el significado de los polinomios osculadores (Introducción).
2. Explicar con sus propias palabras la diferencia sustancial entre polinomio osculador y polinomio de
colocación (Introducción, Capítulos 6, 7, 8).
3.
Expresar con sus propias palabras cinco ventajas y cinco desventajas del uso de los polinomios
osculadores al aproximar una función (Introducción, Capítulos 6, 7, 8).
4. Aplicar los métodos para obtener polinomios osculadores en problemas con datos equidistantes y no
equidistantes (Introducción, Problemas 10.3,10.7 a 10.10,10.15 a 10.17).
5. Desarrollar matemáticamente la fórmula de Hermite que cumple la osculación de primer orden,
además, demostrar que sólo existe un polinomio que cumple las especificaciones requeridas
(Introducción, Problemas 10.1,10.2,10.5).
6.
Aplicar la fórmula de Hermite que cumple la osculación de primer orden en problemas de ejemplo
(Introducción, Problemas 10.3,10.8,10.9,10.15).
7. Obtener una fórmula matemática que muestre la diferencia entre la función original y el polinomio
osculatorio de aproximación; asimismo, estimar el error de aproximación (Problemas 10.4,10.14).
8. Encontrar un polinomio de osculación hasta la segunda derivada y aplicarlo en problemas de
ejemplo (Problemas 10.6,10.7,10.10,10.16,10.17).
9. Encontrar dos polinomios de osculación hasta la segunda derivada y aplicarlos en problemas de
ejemplo (Problemas 10.11,10.12).
10.
Derivar, a partir de la fórmula de osculación de dos puntos de Hermite, la fórmula del punto medio y
estimar el error en que se incurre (Problemas 10.13,10.14).
APLICACIONES DE LOS POLINOMIOS OSCULADORES
La palabra osculatorio proviene de "ósculo" voz de origen latino que significa beso. Como se ha podido ver a lo
largo de los primeros capítulos, la aproximación polinomial es una herramienta muy útil dentro de muy diversas
disciplinas; los polinomios osculadores garantizan que además de tener el mismo valor en determinados puntos
de la función original, lo tienen en la primera derivada, en la segunda derivada y en derivadas de órdenes superiores.
Por lo tanto la gran utilidad de estos polinomios es que a pesar de ser aproximaciones de un original, nos reducen el riesgo de tener grandes oscilaciones aun teniendo exponentes mayores.
www.elsolucionario.org
132
MÉTODOS NUMÉRICOS
10
Como en todos los casos de aproximación polinomial, una vez que tenemos la aproximación adecuada, podemos derivarla, integrarla, evaluarla, conocer su comportamiento, obtener sus raíces y en general emplearla para
hacer cualquier tipo de operaciones que necesitemos.
Este capitulo una vez más está destinado al dominio del conocimiento y a la mecanización del concepto, ya
que se empleará como herramienta en los temas sustanciales de métodos numéricos.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Manejo de funciones discretas
Diferencias finitas
Polinomios factoriales
Sumas (sumatorias)
Sumas y series
El polinomio de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equidistantes
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Casos especiales en la integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas .
Álgebra no lineal y optimización
Raíces de ecuaciones
Ceros de polinomios
Método de descenso más rápido (gradiente)
www.elsolucionario.org
2
10
11
13
14
3
4
5
17
6
7
8
9
12
13
14
15
16
21
22
23
24
25
25
25
POLINOMIOS OSCULADORES
133
POLINOMIOS OSCULANTES
Los polinomios osculantes no sólo concuerdan en valor con una función dada en los argumentos especifica­
dos, que es la idea de la colocación, sino que sus derivadas hasta de cierto orden corresponden también con las
derivadas de la función dada, usualmente en los mismos argumentos. De tal modo para la osculación más simple,
requerimos
para k = 0, 1
n. En el lenguaje de la geometría, esto hace que sean tangentes entre si las curvas que repre­
sentan nuestras dos funciones en estos n + 1 puntos. La osculación de mayor orden requeriría también que
y así sucesivamente. Las curvas correspondientes tienen entonces lo que se denomina contacto de mayor
orden. La existencia y unicidad de los polinomios osculantes puede probarse mediante métodos que se asemejan
a los que se emplearon con los más simples polinomios de colocación.
La fórmula de Hermite, por ejemplo, exhibe un polinomio de grado 2n + 1 o menor que tiene osculación de
primer orden. Éste tiene la forma
son los valores de la función dada y de su derivada en xi. Las funciones Ui(x) y Vi(x) son polinomios
donde
con propiedades similares a las de los multiplicadores de Lagrange Li(x) presentados antes. En efecto,
La fórmula de error de Hermite puede expresarse en una forma que recuerda a la del error de la colocación pero
con una derivada de mayor orden, una indicación de una mayor precisión que puede obtenerse con la osculación.
El error es
Un método de coeficientes indeterminados puede utilizarse para obtener polinomios que tienen osculación
de orden más alto. Por ejemplo, tomando p(x) en la forma estándar
y al requerir que
para los argumentos x0 xn lleva a 3n + 3 ecuaciones para los
3n + 3 coeficientes , Está por demás decir que para n más grande éste será un gran sistema de ecuaciones. Los
métodos del último capítulo pueden utilizarse para resolver tal sistema. En ciertos casos pueden utilizarse procedi­
mientos especiales para realizar simplificaciones.
Problemas resueltos
10.1
Compruebe que
será un polinomio de grado 2n + 1 o menor, cumpliendo
siempre que
www.elsolucionario.org
134
MÉTODOS NUMÉRICOS
a)
sean polinomios de grado 2n + 1.
b)
c)
donde
0 para
1 para
El resultado del grado es obvio, puesto que una combinación aditiva de polinomio de un grado deter­
minado es un polinomio del mismo o menor grado. Sustituyendo x - xk tenemos
p(xk)= Uk(xk)yk+0 = yk
y en forma similar sustituyendo
siendo los demás términos iguales a cero.
10.2
Recordando que el multiplicador de Lagrange L,(x) satisface
muestre que
cumple con todos los requerimientos listados en el problema 10.1
Puesto que Li(x) es de grado n, su cuadrado tiene grado 2n y tanto Ui,(x) como V i (x) son de grado
2n + 1. Para el segundo requerimiento notamos que Ui(xk) - Vi(xk) = 0 para
puesto que Li(xk) = 0. Ade­
más, sustituyendo x = xn
por lo que
Después calculamos las derivadas
De inmediato Ui(xk) = 0 y Vi(xk) = 0 para
debido al factor Li(xk). Y para x - xn Ui(x) = 2Li(xi) - 2Li(xi) = 0
puesto que Li(xi) = 1. Por último, Vi(xi) = [Li (xi)]2 = 1. La fórmula de Hermite es, por tanto
10.3
Una trayectoria de maniobra entre dos rieles de ferrocarril paralelos corresponderá a un polinomio cúbico
que une las posiciones (0, 0) y (4, 2) y que es tangente a las líneas y = 0 y y = 2, como se muestra en la
figura 10-1. Aplique la fórmula de Hermite para producir este polinomio.
www.elsolucionario.org
135
POLINOMIOS OSCULADORES
Fig. 10-1
Las especificaciones requieren un polinomio cúbico que corresponda a estos datos
o
o
2
4
o
o
Con n - 1, tenemos
L 0 (x) = x — xx
x0 - x1
x-x
L1(x) =x - x0
1
L 0 (x) =
0
1
x a - x1
y sustituyendo en la fórmula de Hermite (sólo es necesario calcular el término
L1(x) =
1
x1 - x0
puesto que
La importancia de esta trayectoria de maniobra es, desde luego, que brinda un viaje más suave. Siendo
y
tangente a ambos rieles paralelos, no habrá cambios bruscos de dirección, ni esquinas. Puesto que
no son cero, hay, sin embargo, discontinuidades en la curvatura. (No obstante véase el problema
10.7.)
10.4 Obtenga una fórmula para la diferencia entre y(x) y su aproximación polinomial p(x).
La deducción es muy similar a la de un polinomio de colocación más simple. Ya que y(x) - p(x) y y(x) =
en los argumentos x0
x„ predecimos un resultado de la forma
donde 7t(x) - (x - x0)
que tiene
xn, y haciendo
(x - xn) es como antes. En consecuencia, definimos la función
Eligiendo cualquier argumento xn+1 en el intervalo entre
www.elsolucionario.org
136
MÉTODOS NUMÉRICOS
hacemos también
Puesto que
tiene ahora por lo menos
ceros
en puntos intermedios. También tiene ceros en
haciendo
ceros en total. Esto implica que
ceros por lo menos. Las aplicaciones sucesivas del teorema de Rolle muestran en estas
condiciones que
tiene al menos 2n ceros,
tiene
ceros, y asi sucesivamente hasta
que tiene garantizado al menos un cero en el intervalo entre
esta derivada, obtenemos
que puede resolverse con respecto de C. Sustituyendo hacia atrás,
(2« + 2)
Recordando que
puede ser cualquier argumento aparte de
y notando que este resultado si­
gue cumpliéndose para
(siendo ambos lados iguales a cero), r e e m p l a z a m o s . p o r la más sim­
ple x:
10.5
Pruebe que sólo un polinomio puede cumplir las especificaciones del problema 10.1.
Suponga que son dos los polinomios. Puesto que deben compartir valores comunes
en los ar­
gumentos xk, podemos elegir uno de ellos como el p(x) del problema 10.4 y el otro como el y(x). En otras
palabras, podemos considerar un polinomio como la aproximación del otro. Pero como y(x) es ahora un po­
linomio de grado 2n + 1, sigue que
es cero. En consecuencia, y(x) es idéntico a p(x), y los dos poli­
nomios son en realidad uno y el mismo.
10.6
¿Cómo puede encontrarse un polinomio que corresponda a los siguientes datos?
En otras palabras, se especifican los valores del polinomio y de sus primeras dos derivadas en dos argu­
mentos.
Suponga por simplicidad que x0= 0. Si esto no es cierto, ello se logra muy fácilmente con un corri­
miento de argumento. Sea
con A, B y C por determinarse. En x= x0= 0 las especificaciones ya se han cumplido. En x - x1 requieren
www.elsolucionario.org
137
POLINOMIOS OSCULADORES
Estas tres ecuaciones determinan A, B y C singularmente.
10.7
Una trayectoria de maniobra entre ríeles de ferrocarril paralelos unirá las posiciones (0, 0) y (4, 2). Para
evitar discontinuidades en ambas direcciones y curvatura, se hacen las siguientes especificaciones:
O
o
4
2
o
o
o
o
Encuentre un polinomio que cumpla estas especificaciones.
Aplicando el procedimiento del problema 10.6,
la parte cuadrática se hace cero. En x1= 4 encontramos
64A + 256B + 1024C = 2
a partir de la cual
48A
+ 256B + 1280C = 0
24A + 192B + 1280C = 0
Sustituyendo,
Problemas suplementarios
10.8
Aplique la fórmula de Hermite para encontrar un polinomio cúbico que cumpla estas especificaciones.
o
o
o
1
1
1
Este caso puede considerarse como el correspondiente a una trayectoria de maniobra entre rieles no paralelos.
10.9
Aplique la fórmula de Hermite para encontrar un polinomio que satisfaga las siguientes especificaciones.
o
o
1
2
1
o
o
o
o
10.10 Aplique el método del problema 10.6 para encontrar un polinomio de quinto grado que cumpla las siguientes especificaciones.
www.elsolucionario.org
138
MÉTODOS NUMÉRICOS
o
o
o
1
1
1
o
o
Ésta es una trayectoria de maniobra más suave que la del problema 10.8.
10.11 Encuentre dos polinomios de cuarto grado, uno con
y el otro con
pasando ambos por (2,1), como se indica en la figura 10-2. Muestre que
de modo que un par
de arcos parabólicos sirve también como trayectoria de maniobra entre rieles paralelos, así como el
polinomio cúbico del problema 10.3.
Fig. 10-2
10.12Encuentre dos polinomios d e cuarto grado, uno
c
o
n
y e l otro con
pasando ambos por (2,1) con
Ésta es otra trayectoria para la cual la dirección y
la curvatura están libres de discontinuidades, del mismo modo que el polinomio de quinto grado del
problema 10.7. Verifique esto mostrando que la primera y la segunda derivadas concuerdan en ambos
lados de (0, 0), (2,1) y (4, 2) donde se unen cuatro tramos de la trayectoria.
10.13 A partir de la fórmula de Hermite para la osculación de dos puntos obtenga la fórmula del punto medio
donde L = x 1 - x 0 .
10.14 Muestre que el error de la fórmula en el problema 10.13 es
10.15 Encuentre un polinomio de cuarto grado que cumpla las siguientes condiciones:
www.elsolucionario.org
POLINOMIOS OSCULADORES
Note que no se cuenta con uno de los valores
10.16 Encuentre un polinomio de cuarto grado que cumpla con estas condiciones.
O
1
1
2
-1
7
10.17 Encuentre un polinomio de tercer grado que cumpla con estas condiciones.
O
1
1
1
-2
4
www.elsolucionario.org
139
El polinomio
de Taylor
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras la utilidad del polinomio de Taylor (Introducción).
2. Expresar con sus propias palabras cinco ventajas y cinco desventajas del uso del polinomio de
Taylor al aproximar una función (Introducción).
3. Demostrar que una vez obtenido el polinomio de Taylor, éste es único (Introducción).
4. Encontrar el polinomio de grado n o menor, que junto con sus primeras n derivadas toma los valores
yo,
yo(1)
yo (n) , para el punto x0 (emplee el método de coeficientes indeterminados) (Introducción,
Problema 11.1).
5. Encontrar un polinomio de grado n, tal que en x0 = 0, el polinomio de aproximación y ex concuerdan en
sus valores, junto con sus primeras n derivadas (Introducción. Problema 11.2).
6. Desarrollar matemáticamente la fórmula del residuo del polinomio de Taylor, expresada en forma de
integral (Introducción, Problema 11.3).
7. Desarrollar matemáticamente la fórmula del residuo del polinomio de Taylor, expresada en la fórmula
de Lagrange (Introducción, Problemas 11.4,11.21).
8. Estimar el grado y desarrollar el polinomio de Taylor para alguna función determinada y(x), evaluada
en x0 = 0, que garantice una correcta aproximación con un número definido de decimales (Problemas
11.5,11.11, 11.12, 11.14,11.20, 11.22, 11.23, 11.25).
9. Expresar el polinomio de Taylor con la simbología de los operadores (Introducción, Problemas 11.6 a
11.10, 11.13,11.24, 11.26a 11.29).
10.
Desarrollar matemáticamente el caso especial del polinomio de Taylor, para encontrar la fórmula de
Euler-Maclaurin (Introducción, Problemas 11.15 a 11.19).
APLICACIONES DEL POLINOMIO DE TAYLOR
De acuerdo con los capítulos anteriores, hemos visto que los valores de funciones polinomiales se pueden encontrar efectuando un número determinado de sumas y multiplicaciones.
Sin embargo hay funciones que no se pueden manipular tan sencillamente como la logarítmica, la exponencial y las trigonométricas, por lo que se hace necesario desarrollarlas mediante un polinomio que nos brinda muchas ventajas; éste es el polinomio de Taylor, ya que no sólo nos garantiza la igualdad en los puntos de
colocación, sino que nos garantiza osculación en todas sus derivadas.
Como en todos los casos de aproximación polinomial, una vez que tenemos la aproximación adecuada,
podemos derivarla, integrarla, evaluarla, conocer su comportamiento, obtener sus raíces y, en general, emplearla
para hacer cualquier tipo de operaciones que necesitemos.
www.elsolucionario.org
EL POLINOMIO DE TAYLOR
141
Este capitulo está destinado a mostrar las bondades del polinomio de Taylor, ya que éste puede emplearse en lugar de la función original, debido a que la diferencia entre los valores de la función y la aproximación polinomial es lo suficientemente pequeña.
La aproximación mediante el polinomio de Taylor, llamado así en honor del matemático inglés Brook Taylor
(1685-1731) es uno de los métodos de aproximación más utilizados.
Como se ha podido ver a lo largo de los primeros capítulos, la aproximación polinomial es una herramienta
muy útil dentro de muy diversas disciplinas; los polinomios osculadores, de los cuales el polinomio de Tayior
es uno de los máximos exponentes, garantizan que además de tener el mismo valor en determinados puntos de la
función original, lo tienen en la primera derivada, en la segunda derivada y en derivadas de órdenes superiores.
Este capítulo una vez más está destinado al dominio del conocimiento y a la mecanización del concepto, ya
que se empleará como herramienta en los temas sustanciales de los métodos numéricos.
Cabe mencionar que la fórmula conocida como de Maclaurin (que es un caso especial del polinomio de
Taylor) fue desarrollada antes por los matemáticos Brook Taylor y por James Stirling.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Manejo de funciones discretas
Diferencias finitas
Polinomios factoriales
Sumas (sumatorias)
Sumas y series
El polinomio de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equidistantes
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Casos especiales en la integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas
Álgebra no lineal y optimización
Raíces de ecuaciones
Ceros de polinomios
Método de descenso más rápido (gradiente)
www.elsolucionario.org
2
10
11
13
14
3
4
5
17
6
7
8
9
12
13
14
15
16
21
22
23
24
25
25
25
142
MÉTODOS NUMÉRICOS
EL POLINOMIO DE TAYLOR
El polinomio de Taylor es la esencia de la osculación. Para un solo argumento
se requiere de los valores
del polinomio y de sus primeras derivadas n para igualar aquellas de una función dada y(x). Esto es,
para i = 0, 1, . . . , n
Se demostrará la existencia y unicidad de tal polinomio, donde ambas constituyen resultados clásicos del análisis.
La fórmula de Taylor establece directamente el tema de la existencia al exhibir tal polinomio en la forma
El error del polinomio de Taylor, cuando se considera una aproximación a y(x), puede expresarse por la fór­
mula integral
La fórmula del error de Lagrange puede deducirse aplicando el teorema del valor medio a la fórmula integral.
Ésta es
y se asemeja claramente a nuestras fórmulas de error de colocación y de osculación.
Si las derivadas de y(x) están acotadas independientemente de n, entonces cualquier fórmula de error sirve
para estimar el grado n requerido para reducir
por debajo de una tolerancia preescrita sobre un inter­
valo dado de argumentos x.
Las funciones analíticas tienen la propiedad de que, para n tendiendo al infinito, el error anterior de la aproxi­
mación tiene límite cero para todos los argumentos x en un intervalo dado. Tales funciones son representadas en­
tonces por la serie de Taylor
La serie del binomio es un caso especialmente importante de la serie de Taylor. Para
OPERADOR DE DIFERENCIACIÓN D
El operador de diferenciación D está definido por
www.elsolucionario.org
tenemos
EL POLINOMIO DE TAYLOR
143
El operador exponencial puede entonces definirse como
y la serie Taylor en la forma del operador se convierte en
y{xk) = ekDy0(x0)
La relación entre D y A puede expresarse en cualquiera de las formas
A + í = eD
D = A-~A2 + ^A3
las cuales incluyen operadores de "seríes infinitas".
La transformación de Euler es otra relación útil entre operadores de seríes infinitas. Puede escribirse como
usando la serie del binomio.
Los números de Bernoulli se definen por medio de
En realidad, desarrollando el lado izquierdo en su serie de Taylor encontramos que
y asi
sucesivamente. Estos números se representan en diversas ecuaciones de operadores. Por ejemplo, el operador
sumatoria definida
se define mediante
y se relaciona con D a través de
es el conocido operador integral indefinido.
donde las B¡ son los números de Bernoulli. El operador
La fórmula de Euler-Maclaurin puede deducirse de la relación anterior,
y se emplea con frecuencia en la evaluación ya sea de sumas o integrales.
Las potencias de O pueden expresarse en términos del operador de diferencia central 6 empleando las series de Taylor. Algunos ejemplos son los siguientes:
www.elsolucionario.org
144
MÉTODOS NUMÉRICOS
12
90
560
3150
Problemas resueltos
11.1
Encuentre el polinomio p(x) de grado n o menor, que junto con sus primeras derivadas n toma los valores
en el argumento
Un polinomio de grado n puede escribirse
Diferenciaciones sucesivas producen
Las especificaciones requieren entonces
Resolviendo para los coeficientes a„ y sustituyendo
11.2
Encuentre un polinomio p(x) de grado n tal que, en
primeras derivadas n.
concuerden en valor junto con sus
Puesto que para e* las derivadas de todos los órdenes son también ex,
El polinomio de Taylor puede escribirse por consiguiente
11.3
Considere una segunda función y(x) que tenga también las especificaciones del problema 11.1. Debemos
pensar a p(x) como una aproximación polinomial a y(x). Obtenga una fórmula para la diferencia y(x) - p ( x )
en forma integral, suponiendo que
es continua entre x0 y x.
www.elsolucionario.org
EL POLINOMIO DE TAYLOR
145
Aquí es conveniente usar un procedimiento diferente del que nos llevó a las estimaciones del error co­
rrespondiente a los polinomios de colocación y de osculación. Empezamos denominando temporalmente la
diferencia mediante R,
R=y(x)-p(x)
o con todo detalle
Esto define en realidad a R como función de x y x0. Al calcular la derivada de R relativa a x0, manteniendo fi­
ja x, encontramos
ya que la diferenciación del segundo factor en cada producto cancela el resultado de la diferenciación del
primer factor en el producto previo. Sólo permanece el último término. Habiendo diferenciado con respecto
invertimos la dirección e integramos con respecto a para recuperar R.
a
+ constante
Por la definición original de
y la constante de integración es 0. Invirtiendo los límites,
la cual se conoce como la fórmula integral del error.
11.4
Obtenga la forma de Lagrange del error partiendo de la forma integral.
Aquí empleamos el teorema del valor medio del cálculo, que señala que si f(x) es continua y w(x) no
cambia de signo en el intervalo (a, b) entonces
donde
está entre a y b. Eligiendo x(x) - (x - x0)n, obtenemos fácilmente
donde
está entre x0 y x o su valor se desconoce en otro caso. Esta forma del error es muy popular debido
www.elsolucionario.org
146
MÉTODOS NUMÉRICOS
a su gran semejanza con los términos del polinomio de Taylor. Excepto para un ξ en lugar de un x0 sería el
término que produce el polinomio de Taylor del siguiente grado mayor.
11.5
Estime el grado de un polinomio de Taylor para la función y(x) - ex, con x0 - 0, el cual garantiza
aproximaciones correctas hasta tres lugares decimales para -1 < x < 1. Realice la estimación hasta en seis
lugares decimales.
Por la fórmula de Lagrange del error,
Para una precisión de tres lugares éste no debe exceder .0005, que es una condición que se cumple
para n - 7 o mayor. El polinomio
es, por tanto adecuado. De modo similar, para una precisión de seis lugares
que será verdadero para n - 10.
no debe exceder .0000005,
¿Cuál es el resultado de la aplicación de potencias sucesivas de D
11.6
Tenemos de inmediato que
11.7
Exprese el polinomio de Taylor en símbolos de operadores.
Sea x - x0 - kh. Éste es el simbolismo que hemos usado antes, con xk abreviado ahora como x. De tal
modo la sustitución directa del polinomio de Taylor del problema 11.1 nos lleva a
Una manera común de reescribir este resultado es
o en términos de la variable entera k
donde como antes p(xk) - pk.
11.8
Una función y(x) se llama analítica en el intervalo
si cuando n
lím R(x, x()) = 0
www.elsolucionario.org
∞,
EL POLINOMIO DE TAYLOR
147
para todos los argumentos x en el intervalo. Es entonces costumbre escribir y(x) como una serie infinita, lla­
mada serie de Taylor
Exprese ésta en forma de operador.
Procediendo igual que en el problema 11.7, e n c o n t r a m o s É s t e es nuestro pri­
mer operador de serie infinita. La aritmética de tales operadores no es tan fácil de justificar como en el caso
de los operadores más simples utilizados antes.
11.9
El operador ekD se define como
Escriba la serie Taylor utilizando este operador.
Tenemos de inmediato que
11.10 Pruebe que eD = E.
Por el problema 11.9 con k - 1 y la definición de E, y(x1) = y1 = Ey0 - eD y0 haciendo E = e D .
11.11 Desarrolle la serie de Taylor para y(x) = In (1 + x), usando x0 = 0.
Las derivadas son
tenemos
por lo que
Puesto que y(0) - In 1 - 0,
La prueba conocida del cociente muestra que ésta será convergente para -1 < x < 1. Sin embargo, pruebe
que en otro caso ia serie es igual a ln(1 + x). Para ello deje que p(x) represente el polinomio de Taylor, de
grado n. Después por la fórmula de Lagrange para el error
Considere por simplicidad sólo el intervalo 0 < x < 1. La serie se aplica principalmente en este intervalo. El
error puede estimarse sustituyendo ξ por 0 y x por 1 para producir
y esto tiene
límite 0. De tal modo p(x) - ln(1 + x), que era nuestro objetivo.
11.12 Estime el grado de un polinomio de Taylor para la función y(x) = ln(1 + x), con xo = 0, que garantice una
precisión de tres lugares decimales en 0 < x < 1.
Por la fórmula de Lagrange para el error
www.elsolucionario.org
148
MÉTODOS NUMÉRICOS
11.13 Exprese el operador D en términos del operador Δ.
De eD - E encontramos D = In E = In (1 + Δ) = Δ +•••.
La validez de este cálculo no está plenamente confirmada, y cualquier aplicación del mismo debe
comprobarse con todo cuidado. Sugiere que el operador de la serie final producirá el mismo resultado que
el operador D.
11.14 Exprese y(x) - (1 + x)p como una serie de Taylor.
Para un entero positivo p, éste es el teorema del binomio del álgebra. Para otros valores de p es la
serie del binomio. Sus aplicaciones son muy amplias. Fácilmente encontramos
y(1)(x) =p(p - 1) • • • (p - i + 1)(1 +x)p-1 =p(i)(1+x)p
donde p ( i ) es otra vez un polinomio factorial. Eligiendo x0 - 0
y(i)(0)=p(i)
y sustituyendo en la serie de Taylor,
donde (pi) es el coeficiente binomial generalizado. Puede demostrarse la convergencia de esta serie a y(x)
para -1 < x < 1.
11.15 Utilice la serie del binomio para reducir la transformación de Euler.
La transformación de Euler es un acomodo extensivo de la serie alternante S -a0-a,+ a2-a3 + • • •
que reescribimos como
S = (1 - E + E2 - E3 + • •)a0 = (1 + E)-1a0
por el teorema del binomio con p = - 1 . El operador (1 + E)-1 puede interpretarse como el operador inverso
de 1 + E. Se obtiene una segunda aplicación del teorema del binomio
Nuestra deducción de esta fórmula ha sido una aplicación un poco optimista de la aritmética de operadores.
No existe un criterio general fácil de aplicar que asegure su validez.
11.16 Los números de Bernoulli se definen como los números B¡ en la siguiente serie:
Encuentre
www.elsolucionario.org
mnin.Hn
EL POLINOMIO DE TAYLOR
149
La serie de Taylor requiere que y (i) (0) =Bi pero es más fácil en este caso proceder de manera dife­
rente. Multiplicando por ex -1 y empleando la serie de Taylor para ex, obtenemos
X= X
1
1
6
2
B 0 + B1x
1
B2x2
2
1
B3x3
6
Comparando ahora los coeficientes de potencias sucesivas de x,
Bo = l
B6 =
1
B1=
1
42
2
B7 = 0
1
6
B3 = 0
B8 =
1
30
B2 =
B4 =
B9 = 0
1
30
B5 = 0
B10 =
5
66
Es evidente la forma en la que podría continuarse el proceso.
11.17 Suponga que ΔFk = yk. Entonces un operador inverso Δ-1 puede definirse mediante
Fk = Δ-1yk
Este operador inverso es "indefinido" en que para un yk dado están determinados los Fk excepto por una
constante aditiva arbitraría. Por ejemplo, en la siguiente tabla los números yk se listan como primeras dife­
rencias. Muestre que los números F0 pueden elegirse de manera arbitraría y que ios demás números Fk es­
tán, por consiguiente, determinados.
F0
•
Tenemos de inmediato
F1 = F0 + y0
y en general
F2 = F 1 + y 1 = F0 + y0 + y1
F3 = F2 + y 2 = F0 + y 0 + y 1 + y2
Los requerimientos se mantienen claramente para un F0 arbitrario, y la analogía
con la integración indefinida es aparente.
11.18 Obtenga una fórmula para Δ-1 en términos del operador D.
El resultado eD - 1 + Δ sugiere que
Δ-1 = (eD - I)-1 = D-1[D(eD - l) - 1 ]
donde D-1 es un operador integral indefinido, un inverso de D. De la definición de los números de Bernoulli,
www.elsolucionario.org
150
MÉTODOS NUMÉRICOS
Como ocurre siempre con la integral indefinida (y aquí tenemos también una sumatoria indefinida)
puede suponerse la presencia de una constante aditiva.
11.19 Obtenga de manera opcional la fórmula Euler-Maclaurin.
Combinando los resultados de los dos problemas anteriores, tenemos
De acuerdo con el primero de éstos,
en tanto que al considerar el segundo,
por lo que finalmente,
que es la fórmula de Euler-Maclaurin. El operador aritmético empleado en esta deducción requiere claramente de fundamento lógico, pero el resultado es útil a pesar de su cuestionable origen y no obstante el hecho de que la serie obtenida suele ser no convergente.
Problemas suplementarios
11.20 Encuentre los polinomios de Taylor de grado n para el sen x y el cos x, usando x0 - 0.
11.21 Exprese el término del error en la forma de Lagrange, tanto para el sen x como para el cos x. Muestre que
cuando n — ∞ este error tiene límite 0 para cualquier argumento x.
11.22 ¿Para qué valor de n el polinomio de Taylor se aproximará a sen x correctamente hasta alcanzar tres
lugares decimales en 0 < x < π/2?
11.23 ¿Para qué valor de n el polinomio de Taylor se aproximará a cos x correctamente hasta alcanzar tres
lugares decimales en 0 < x < π/2?
www.elsolucionario.org
EL POLINOMIO DE TAYLOR
151
11.24 Exprese el operador Δ como un operador de seríes en D.
11.25 Las funciones senh x y cosh x se definen como
senhx =
ex-e-x
2
cosh x =
ex + e-x
2
Muestre que sus series de Taylor son
senhx =
coshx =
11.26 Muestre mediante la aritmética de operadores que δ = 2senh D, μ = cosh D.
11.27 Utilice la serie del binomio para expresar Δ término δ7.
δ2 + 6
como una serie de potencias de δ, hasta el
11.28 Combine los resultados de los problemas 11.13 y 11.27 para expresar D como una serie de potencia de δ,
comprobando estos términos hasta δ7.
11.29 Verifique los siguientes términos de una serie de Taylor para D 2 :
elevando al cuadrado el resultado del problema 11.28 y agrupando las diferentes potencias de δ.
www.elsolucionario.org
Interpolación
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras al concepto de interpolación (Introducción).
2. Explicar con sus propias palabras la utilidad y cuando menos cinco aplicaciones de la interpolación
(Introducción).
3. Explicar con sus propias palabras el concepto de extrapolación (Introducción).
4. Explicar con sus propias palabras el método de interpolación lineal (Introducción).
5. Explicar gráficamente el método de interpolación lineal (Introducción).
6. Explicar con sus propias palabras el concepto de polinomio único de interpolación, recurriendo a la
teoría presentada en el capítulo 6.
7. Demostrar que el polinomio de interpolación es único, recurriendo a la teoría presentada en el
capítulo 6.
8. Desarrollar matemáticamente el método de Lagrange para la obtención del polinomio de interpolación
(Problemas 12.10.12.23,12.37,12.38).
9. Obtener el polinomio de interpolación que pasa por un conjunto dado de puntos, utilizando el método de
Lagrange (Problemas 12.10,12.23,12.37,12.38).
10. Desarrollar matemáticamente el método de Newton (diferencias progresivas), para la obtención de
polinomio de interpolación, recurriendo a la teoría presentada en los capítulos 3, 6, 7 y 8 (Problemas
12.1.12.3,12.4).
11. Obtener el polinomio de interpolación que pasa por un conjunto de puntos dado, utilizado el método
de Newton (diferencias progresivas), recurriendo a la teoría presentada en los capítulos 3,6,7 y 8
(Problemas 12.1,12.3.12.4).
12. Desarrollar matemáticamente el método de Newton (diferencias regresivas), para la obtención del
polinomio de interpolación, recurriendo a la teoría presentada en los capítulos 3, 6, 7 y 8 (Problemas
12.7,12.28,12.54).
13. Obtener el polinomio de interpolación que pasa por un conjunto de puntos dado, usando el método de
Newton (diferencias regresivas), recurriendo a la teoría presentada en los capítulos 3, 6, 7 y 8
(Problemas 12.7,12.28,12.54).
14. Desarrollar matemáticamente el método de Aitken-Neville (interpolación lineal iterativa), para la
obtención del polinomio de interpolación (Introducción, Capitulo 8).
15. Obtener el polinomio de interpolación que pasa por un conjunto de puntos dado, usando el método de
Aitken-Neville (interpolación lineal iterativa) (Introducción, Capítulo 8).
www.elsolucionario.org
INTERPOLACIÓN
153
16. Explicar con sus propias palabras el concepto de interpolación lineal inversa (Problema 12.11).
17. Explicar con sus propias palabras tres ventajas y tres desventajas de cada uno de los métodos de
interpolación tratados en este capítulo.
18. Mencionar todos los métodos de interpolación que se pueden utilizar cuando se tienen puntos
equiespaciados.
19. Mencionar todos los métodos de interpolación que se pueden utilizar cuando se tienen puntos no
equiespaciados.
20. Elegir el mejor método de interpolación de acuerdo con la función o tabulación que se le presente en
un problema práctico determinado.
APLICACIONES DE LA INTERPOLACIÓN
Este capítulo es el primero que propiamente aplica la materia esencial de este libro, ya que nos presenta una amplia gama de métodos numéricos para interpolar; la mayor parte de los métodos se fundamentan en teoría y
mecanizaciones plasmadas en los primeros once capítulos, ya que como se ha mencionado en el prefacio, la parte medular de los métodos numéricos se inicia precisamente aquí.
Los métodos de interpolación son muy variados debido que su utilización depende de la función con la
que vayamos a trabajar, o bien del comportamiento de valores tabulados, en cuyo caso puede ser que sepamos si
tienen error y la magnitud del mencionado error, o consideremos que son datos fidedignos. (La teoría sobre errores en los datos se estudia en el capítulo 1.)
La interpolación polinomial, que muchos autores llaman colocación o aproximación polinomial, es precisamente como lo sugieren sus diversos nombres, la garantía de que dada una función o. una sucesión de datos, podremos encontrar un polinomio que nos asegure que, evaluado en esa sucesión de datos, su valor
es igual al valor original.
La ventaja fundamental de tener un polinomio de interpolación es que lo podremos encontrar de manera
que sea más fácil de utilizar que la función original o que los datos discretos.
Podremos encontrar diferentes formas de expresar el mismo polinomio, como el caso del polinomio de
Newton, tratado en los capítulos 6 y 7, o bien, encontrar diferentes polinomios, dependiendo del método empleado; sin embargo si hemos aplicado adecuadamente el método, llegaremos a resultados similares por caminos diferentes, como lo podremos ver en los ejercicios de aplicación.
La interpolación polinomial se emplea como primer paso en diversos métodos como la integración numérica, que se trata en el capitulo 14, y la solución de ecuaciones diferenciales ordinarias, capítulos 18 y 19, debido a
lo cual es usual reemplazar la función original por un polinomio de interpolación; como ejemplo de los métodos tenemos las fórmulas de cuadratura de Newton, Romberg (integración), Euler-Romberg y Adams-BashforthMoulton (ecuaciones diferenciales).
También encontraremos en este capítulo herramientas para conformar nuestro criterio ingenien! y tomar decisiones apropiadas al enfrentarnos con problemas de la vida real. La interpolación se emplea prácticamente en
cualquier rama de la ingeniería, ya que en todas, en mayor o menor grado, se emplean muestras de datos, así como también fórmulas complicadas y difíciles de manipular y evaluar.
Desde que estudiamos secundaria, se nos indujo en el concepto de interpolación lineal empleado en trigonometría, conocimiento que iremos sofisticando gradualmente y que seguiremos aplicando a lo largo de cualquier
carrera ingenien!, administrativa o contable.
www.elsolucionario.org
154
MÉTODOS NUMÉRICOS
Algunos métodos empleados en áreas de economía y de mercadotecnia, destinados a conocer el comportamiento de variables tales como oferta, demanda, tendencias, etc. están basados en el concepto de interpolación.
Asimismo, para poder hacer predicciones sobre datos estadísticos, requeriremos primero interpolar para
después extrapolar.
CORRELACIÓN DEL T E M A CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Manejo de funciones discretas
Diferencias finitas
Polinomios factoriales
Sumas (sumatorias)
Sumas y series
El polinomio de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equidistantes
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Casos especiales de la integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas
Álgebra no lineal y optimizadón
Raíces de ecuaciones
Ceros de polinomios
Método de descenso más rápido (gradiente)
www.elsolucionario.org
2
10
11
13
14
21
3
4
5
17
6
7
8
9
12
13
14
15
16
. 21
22
23
24
25
25
25
12
INTERPOLACIÓN
155
ANTECEDENTES HISTÓRICOS
Los capítulos anteriores han consistido básicamente en teoría de apoyo. Ésta se utilizará ahora de diversas
maneras, empezando por el problema clásico de la interpolación, que corresponde al familiar proceso de estimar
los valores de una función y(x) para argumentos entre x0 xn en los que se conocen los valores y0,..., yn. La
interpolación inversa se realiza sencillamente en la dirección opuesta. La subtabulación es la interpolación siste­
mática de muchos valores entre cada par de argumentos xi xi+1 reduciendo así el espaciamiento de una tabla de
valores, tal vez de h a h/10. La predicción requiere estimar un valor y(x) para x fuera del intervalo en el que se en­
cuentran los argumentos dato.
Todas estas operaciones fueron mucho más apremiantes antes del advenimiento de las computadoras de
alta velocidad, que calculan valores de todas las funciones conocidas mediante series u otras formas no tabulares.
Las fórmulas de este capítulo llevan los nombres de prominentes matemáticos del siglo pasado y épocas anterio­
res, cuando las tablas de funciones eran indispensables. Su lugar en nuestro tema es parcialmente, más no del to­
do, histórico. Es interesante ver cómo fueron superados los obstáculos computacionales de tiempos pasados,
aunque es importante notar que las tablas de funciones especiales siguen elaborándose de manera qué una parte
de este trabajo continúa teniendo un papel de utilidad.
MÉTODOS DE SOLUCIÓN
Los métodos de interpolación implican sustituir para y(x) alguna función más fácil de calcular, con frecuencia
un polinomio, y la más simple de todas es una línea recta. Los valores de y0 yn pueden introducirse en cual­
quiera de nuestras fórmulas de polinomios (Newton, Everett,...), las cuales se convierten en esa forma en un al­
goritmo para la interpolación, siendo la salida una aproximación a y(x). Se observó que empleando datos de
ambos lacios del argumento de interpolación x se lograba algo que "tenia sentido" y con ello se llegó a mejores va­
lores o a cálculos más cortos. Las formulas de Stirling, Bessel y Everett surgieron con base en este razonamiento
y el estudio de los errores comprendidos brinda un soporte lógico. Al final de una tabla esto no se podía hacer y
entonces se requería utilizar las fórmulas progresiva y regresiva de Newton. No era necesario elegir el grado del
polinomio de aproximación desde el principio sólo para continuar ajusfando diferencias de la tabla en los lugares
apropiados, siempre que los resultados parecieran estar garantizados. Se observó también que ocurre un punto
de disminución de retornos, donde los resultados empeoran en lugar de mejorar, y que este punto depende de la
precisión de los valores tabulados.
El procedimiento alternativo de Lagrange ajusta el polinomio a los datos sin utilizar diferencias finitas. El gra­
do tiene que elegirse al principio, pero el método tiene ventajas adicionales. El método de Aitken es otra variante
que no requiere un espaciamiento igual de los argumentos tabulares o del grado del polinomio al principio.
Los polinomios de osculación y el polinomio de Taylor encuentran aplicación también en los problemas de
interpolación en circunstancias especiales.
ERRORES DE ENTRADA Y DE ALGORITMO
Los errores de entrada y de algoritmo ocurren en todas estas aplicaciones. Su impacto en las salidas finales
puede estimarse sólo hasta cierto punto. Suelen identificarse tres fuentes principales de error.
1.
Los errores de entrada surgen cuando son inexactos los valores
valores experimentales o calculados.
2.
El error de truncamiento es la diferencia y(x) - p(x), la cual aceptamos en el momento que decidimos uti­
lizar una aproximación polinomial. Se ha encontrado antes que este error es igual a
y(x)-p(x) =
π(x)
(n + l)
y0
y(n+1)(ξ)
www.elsolucionario.org
yn
dados, como suelen ser los
156
MÉTODOS NUMÉRICOS
Aunque se desconoce ξ, esta fórmula puede seguirse usando en algunas ocasiones para obtener cotas
de error. El error de truncamiento es un tipo de error de algoritmo. Este error puede ser sustancial en los
problemas de predicción puesto que el factor π(x) se vuelve extremadamente grande fuera del intervalo
en el cual se encuentran los argumentos dato x0
xn.
3.
Los errores de redondeo ocurren puesto que las computadoras operan con un número fijo de dígitos y
se pierden todos los dígitos que se producen en multiplicaciones o divisiones. Ellos son otro tipo de error
de algoritmo.
Problemas resueltos
12.1
Prediga los dos valores faltantes de yk.
4
k=xk
0
1
2
3
5
yk
1
2
4
8 15 26
6
7
A pesar de que éste es un ejemplo sencillo, servirá para recordarnos que las aplicaciones se basarán
en la aproximación polinomial. Calcule algunas diferencias
1 2 4 7 11
12 3 4
1 1 1
Presumiblemente los valores faltantes yk podrían ser cualquiera de estos números, pero la evidencia de es­
tas diferencias apunta principalmente hacia un polinomio de grado tres, lo que sugiere que los seis valores
yk dados y los dos que se predecirán pertenecen a dicho polinomio. Aceptando esto como una base para la
predicción, no es ni siquiera necesario encontrar este polinomio de colocación. Sumando dos 1 más al ren­
glón de las terceras diferencias, suministramos de inmediato un 5 y un 6 al renglón de las segundas diferen­
cias, un 16 y un 22 como nuevas primeras diferencias, y predecimos entonces y6 = 42 y y7 = 64. Éstos son
los mismos datos utilizados en el problema 6.12, donde se encontró el polinomio de colocación cúbico.
12.2 En la tabla 12.1 se listan valores de y(x) redondeados hasta cuatro lugares decimales, para argumen­
tos x - 1.00(.01)1.06. (Esto significa que los argumentos van de 1.00 a 1.06 y están igualmente espaciados
con h - .01.) Calcule las diferencias hasta Δβ y explique su significado.
Las diferencias se listan también en la tabla 12.1.
Por simplicidad, los ceros que encabezan se omiten en las diferencias registradas. En esta tabla to­
das las diferencias son hasta el cuarto valor decimal. Aunque la función raíz cuadrada es en realidad no li­
neal, las primeras diferencias son casi constantes, lo que sugiere que sobre el intervalo tabulado y hasta
una precisión de cuatro lugares, esta función puede aproximarse en forma exacta mediante un polinomio li­
neal. La entrada Δ2 es la que mejor se considera como un error de redondeo unitario, y su efecto sobre dife­
rencias de mayor orden sigue el familiar patrón del coeficiente del binomio observado en el problema 3.10.
En esta situación lo común sería calcular sólo las primeras diferencias. Muchas funciones familiares tales
www.elsolucionario.org
INTERPOLACIÓN
157
log x, sen x, etc., se han tabulado en esta forma, con argumentos espaciados de manera tan rígi­
como
da que las primeras diferencias son casi constantes y la función puede aproximarse con precisión mediante
un polinomio lineal.
12.3
Aplique la fórmula progresiva de Newton con n - 1 para interpolar considerando
Tabla 12.1
Δ Δ2
1.00
1.0000
1.01
1.0050
Δ4
Δ3
Δ5
Δ6
50
0
50
1.02
1.0100
-1
1
49
1.03
1.0149
4
1
0
0
0
1.0198
0
49
1.05
-3
-1
0
49
1.04
2
-1
0
1.0247
49
1.06
1.0296
La fórmula de Newton se lee
Pk=y 0 +
Δy0 +
Δ2y0 + • • • +
Eligiendo n - 1 para una aproximación lineal encontramos, con k = x - x0
h
pk = 1.0000+
Δny0
1.005-1.00
.01
(.0050) = 1.0025
Esto no es una sorpresa. Puesto que hemos usado un polinomio de colocación lineal, que corresponde a
nuestros valores de y=en argumentos 1.00 y 1.01, podríamos haber anticipado con seguridad este re­
sultado intermedio.
12.4
¿Cuál podría ser el efecto al utilizar un polinomio de grado mayor para interpolación del problema 12.3?
Un cálculo sencillo muestra que varios de los siguientes términos de la fórmula de Newton, empezan­
do con el término de la segunda diferencia, corresponden aproximadamente con .00001. No hay ningún
efecto sobre nuestro resultado.
12.5
En la tabla 12.2 se listan los valores de y(x) redondeados hasta cinco lugares decimales, para ar­
gumentos x = 1.00(.05)1.30. Calcule las diferencias hasta Δ6 y explique su significado.
Las diferencias se listan en la tabla 12.2
www.elsolucionario.org
158
Tabla 12.2
Δ
x
1.00
1.00000
1.05
1.02470
Δ2
Δ3
Δ4
Δs
Δ6
2470
-59
2411
1.10
1.04881
1.15
1.07238
5
-54
2357
-50
2307
1.20
1.09544
-1
-2
-48
4
3
2
2259
1.25
-1
4
1
3
-45
1.11803
2214
1.30
1.14017
Aquí el patrón del error es más confuso pero las fluctuaciones de los signos + y - en las últimas tres colum­
nas se asemejan a los efectos producidos en los problemas 3.10 y 3.11. Es posible que sea más adecuado
considerar estas tres columnas como efectos del error, no como información útil para calcular la función de
la raíz cuadrada.
12.6
Utilice los datos del problema 12.5 para interpolar en
La fórmula progresiva de Newton es conveniente para interpolaciones cercanas a la parte superior de
la tabla. Con k - 0 en la entrada superior x0 - 1.00, esta elección conduce a términos reducidos y hace que
sea casi automática la decisión de cuántos términos usar. Sustituyendo en la fórmula como se presenta en
encontramos
el problema 12.3, con k = (x - x0)lh = (1.01 -1.00)/.05=
pk = 1.00000+ (.02470)-
(-.00059)+
(.00005)
terminando con este término puesto que no afecta el quinto lugar decimal. Note que este último término utili­
za las diferencias de mayor orden que consideramos en el problema 12.5, importantes para los cálculos de
la raíz cuadrada. No hemos violado las columnas que presumiblemente eran sólo efectos de error. El valor
de p„ se reduce a
pk = 1.000000 + .004940 + .000048 + .000002 = 1.00499
que es correcto hasta cinco lugares. (Si esto es posible es apropiado llevar un lugar decimal extra durante
los cálculos para controlar los "errores de algoritmo" descritos en el capítulo 1. En los cálculos de máquina,
desde luego el número de dígitos es fijo de cualquier modo, por lo que no se aplica esta observación.)
que es correcto hasta cinco lugares. (Si esto es posible es apropiado llevar un lugar decimal extra durante
los cálculos para controlar los "errores de algoritmo" descritos en el capítulo 1. En los cálculos de máquina,
desde luego el número de dígitos es fijo de cualquier modo, por lo que no se aplica esta observación.)
12.7
Use los datos del problema 12.5 para interpolar en
Aquí es conveniente la fórmula regresiva de Newton y la mayor parte de las observaciones hechas en
el problema 12.6 se aplican otra vez. Con k = 0 en la entrada inferior x0 = 1.30, tenemos k = (x - x0)lh =
www.elsolucionario.org
INTERPOLACIÓN
159
(1.28 -1.30)/.05 -
Sustituyendo en la fórmula regresiva (problema 7.9)
obtenemos
p k = 1.14017+
(.02214)+(-.00045)+
(.00003)
= 1.140170 - .008856 + .000054 - .000002 = 1.13137
que es correcta hasta cinco lugares.
12.8
Los dos problemas previos han tratado casos especiales de la interpolación, trabajando cerca de la parte
superior y de la parte inferior de una tabla. Este problema es más común en los datos de que se dispondrá
en ambos lados del punto de interpolación. Interpole para
utilizando los datos del problema 12.5.
Las fórmulas de diferencia central son convenientes en este caso puesto que ellas facilitan el uso de
datos más o menos iguales a ambos lados. En el problema 12.15 veremos que esto tiende también a man­
tener pequeño el error de truncamiento. Se utilizara la fórmula de Everett
donde se han omitido los términos de mayor orden puesto que no se necesitarán en el problema. Eligiendo
tenemos
Sustituyendo en la fórmula de Everett,
pk=
(1.07238)+
(1.04881) - I
(-.00050)+
(-.00054)-
(-.00002)
(-.00001)
= .428952 + .000028 + .629286 + .000035
sin que contribuyan en nada los dos términos de más alto orden (como esperábamos, ya que éstos se ex­
traen de las columnas de efectos de error). Por último pk = 1.05830, que es correcto hasta cinco lugares.
Note que las tres interpolaciones hechas en la tabla 12.2 se han basado en polinomios de colocación de
tercer grado.
12.9
Se ha pedido al empleado más joven de un laboratorio "buscar" el valor y(.3333) en la tabla NBS-AMS 52
de la Serie de Matemáticas Aplicadas del National Bureau of Standards. En la página apropiada de este ex­
tenso volumen el empleado encuentra abundante información de la cual una parte pequeña se produce en
la tabla 12.3. Aplique la fórmula de Everett para la interpolación necesaria.
www.elsolucionario.org
160
MÉTODOS NUMÉRICOS
Tabla 12.3
X
y(x)
δ2
.31
.32
.33
.34
.1223 4609
.12669105
.13105979
.1354 5218
.1398 6806
2392
2378
2365
2349
2335
.35
Eligiendo x = 0 en x0 = .33, tenemos k = (x-x0)lh = (.3333 = .33)/.01 - .33. Escribiendo la fórmula de
Everett hasta las segundas diferencias en la forma
pk = ky1 + (1 - k)y0 + E1δ2y1 - E0δ2y0
donde
E1=
y E0=
, el interpolador encontrará todos los ingredientes disponibles en las tablas. Para
k = .33, encontramos E1 = -.0490105, E0 = .0615395. Entonces
pk = (.33)(. 13545218) + (.67)(. 13105979) + (-.0490105)(.00002349) - (.0615395)(.00002365)
= .13250667
Esta tabla se preparó con la fórmula de Everett en mente.
12.10 Aplique la fórmula de Lagrange para obtener
a partir de ios datos de la tabla 12.2.
La fórmula de Lagrange no requiere argumentos igualmente espaciados. Puede aplicarse, desde lue­
go, a tales argumentos como un caso especial, pero se presentan dificultades. El grado del polinomio de
colocación debe elegirse al principio. Con las fórmulas de diferencias de Newton, Everett u otras puede de­
terminarse el grado calculando términos hasta que ya no sean significativos. Cada término es una correc­
ción aditiva para los términos ya acumulados. Pero con la fórmula de Lagrange un cambio de grado implica
un cálculo por completo nuevo, de todos los términos. En la tabla 12.2 la evidencia apunta a que es apro­
piado un polinomio de tercer grado. Podemos proceder sobre esta base para elegir x0 = 1.05
x3 = 1.20
y sustituir en
(x - x0) (x - x2) (x - x3)
(x - x1 )(x - x2) (x - x3)
p = (x - x )(x - x )(x - x ) y0
0
1
0
2
0
(x1-x0)(x1-x2)(x1-x3)
3
y1
(x-x0)(x-x1)(x-x3)
(x2-x0))(x2-x1)(x2-x3)
y2
(x-x0)(x-x1)(x-x2)
(x3-x0)(x3-x1)(x3-x2)
para producir
p=
(1.02470)+
(1.04881)+
(1.07238)+
Esto concuerda con el resultado del problema 12.8.
www.elsolucionario.org
(1.09544) = 1.05830
y3
INTERPOLACIÓN
161
12.11 El problema de la interpolación inversa invierte los papeles de xk y yk. Podemos considerar los números yk
como argumentos y los xk como valores. Es claro que los nuevos argumentos no tienen usualmente el
mismo espaciamiento. Dado que = 1.05, use los datos de la tabla 12.2 para encontrar x.
Puesto que podríamos determinar con facilidad que x = (1.05)2 -1.1025 mediante una simple multipli­
cación, esto no es más que otro "caso de prueba" de nuestros algoritmos disponibles. Puesto que se aplica
a argumentos desigualmente espaciados, suponga que usamos la fórmula de Lagrange. Intercambiando los
papeles x y y.
p-
(y - yo)(y - y2)(y - y3)
(y - y1)(y - y2)(y - y3)
Xo
x1
(yo-yl)(yo-y2)(y0-y3)
(y1-yo)(yi-y2)(y1-y3)
(y - y0)(y - y1)(y - y1)
X2
(y2-yo)(y2-y1)(y2-y3)
(y - y0)(y - y1)(y - y2)
x3
(y3-y0)(y3-y1)(y3-y2)
Con los mismos cuatro pares xk, yk utilizados en el problema 12.10, esto se convierte en
p = (- .014882)1.05 + (.97095)1.10 + (.052790)1.15 + (- .008858)1.20 = 1.1025
como se esperaba.
12.12 Aplique la fórmula de Everett al problema de interpolación inversa que acaba de resolverse.
Como la fórmula de Everett requiere argumentos igualmente espaciados, regresamos x y y a sus pa­
peles originales. Escribiendo la fórmula de Everett como
1.05 = k(1.07238) +
(-.00050)+(-.00002)
+ (1 - k)(1.04881) -
(-.00054)-
(-.00001)
tenemos una ecuación polinomial de quinto grado en k. Éste es un problema que se trata de manera amplia
en un capítulo posterior. Aquí puede utilizarse un procedimiento iterativo simple. Descártense primero todas
las diferencias y obténgase una primera aproximación resolviendo
1.05 = k(l.07238) + (1 - k)(1.04881)
El resultado de esta interpolación lineal inversa es k = .0505. Insértese este valor en los términos δ 2 , des­
preciándose todavía los términos δ4, y obténgase una nueva aproximación a partir de
1.05 = k(1.07238)+
(-.00050) + (1 - k)(1.04881)-
(.00054)
Esto da por resultado k = .0501. Al aplicar este valor tanto en los términos δ2 como en los δ4 se obtiene
k = .0500. Al reintrodudr este último valor de k en los términos δ2 y δ4, k se reproduce, por lo que interrumpi­
mos el proceso. El correspondiente valor de x es 1.1025 hasta cuatro lugares.
12.13 Interpole en
en la tabla 12.2.
Para estos argumentos que se encuentran en la parte media de los argumentos tabulados, la fórmula
www.elsolucionario.org
162
MÉTODOS NUMÉRICOS
de Bessel es muy atractiva. Primero elíjase k = 0 en x0 = 1.10, haciendo k = (1.125 — 1.10)/.05 la de Bessel (problema 7.25) es
Pk = μy1/2 +
μδ2y1/2 +
La fórmu­
μδ4y1/2
si interrumpimos el procedimiento en el cuarto grado. Los términos de diferencias impares desaparecen por
completo debido a los factores k - Sustituyendo,
pk = 1.06060+
(-.00052)+
(-.000015) = 1.06066
sin que contribuya de nuevo el término δ4. De modo similar en el segundo caso, con k = 0 ahora en x0 =
1.15, tenemos otra vez k = y encontramos pk = 1.08397. Al encontrar todos esos valores medios, es posi­
ble duplicar el tamaño de la tabla. Éste es un caso especial del problema de subtabulaclón.
12.14 Al usar un polinomio de colocación p(x) para calcular aproximaciones a una función, aceptamos el llamado
error de truncamiento, y(x) -p(x). Estime este error en nuestras interpolaciones en la tabla 12.1.
La fórmula para el error de truncamiento de un polinomio de colocación se obtuvo en el capítulo 2 y
es la siguiente
cuando la aproximación polinomial es de grado n. Para la tabla encontramos apropiada n = 1. Los puntos
de colocación pueden denominarse x0 y x1 conduciendo a esta estimación de error para la interpolación li­
neal:
Puesto que
tenemos
Para k entre 0 y 1, que arreglamos para cualquier intervalo de nuestra elección de x0, el polinomio cuadrático k(k - 1 ) tiene un tamaño máximo de en el punto medio k = (véase la Fig. 12-1). Esto nos permite com­
pletar nuestra estimación del error de truncamiento,
Fig. 12-1
www.elsolucionario.org
INTERPOLACIÓN
163
y descubrimos que no puede afectar el cuarto lugar decimal. La tabla 12.1 se elaboró considerando la inter­
polación lineal. Se eligió el intervalo h = .01 para mantener este valor pequeño del error de truncamiento.
12.15 Estime los errores de truncamiento para nuestros cálculos en la tabla 12.2.
Usamos principalmente la fórmula de Everett para un polinomio cúbico. Para otras fórmulas cúbicas
se obtiene la misma estimación del error. Suponiendo argumentos de colocación igualmente espaciados x-1
X 0 , X1 y X2,
y(x)-p(x) =
(x - x-1)(x - x0)(x - x1)(x - x2) (4)
y (ξ)
(k + l)k(k-l)(k-2)h 4 y (4) ξ
El polinomio (k + 1) k (k - 1)(k - 2) tiene la fórmula general de la figura 12.2. Fuera del intervalo -1 < k < 2
asciende considerablemente. Dentro de 0 < k < 1 no excede a y ésta es una parte apropiada para la inter­
polación. Tenemos ahora, para un error máximo en la interpolación cúbica.
En este ejemplo h = .05 y y (4) (x)
=
y como consecuencial y(x) error de truncamiento no ha afectado nuestros cálculos de cinco decimales.
por lo que el
Fig. 12-2
12.16 ¿Qué tan grande podría hacerse la longitud del intervalo h en una tabla de
siga teniendo una precisión de cinco lugares? (Suponga 1 x.)
con una fórmula cúbica que
Este tipo de pregunta es naturalmente de interés para los encargados de elaborar tablas. Nuestra
fórmula del error de truncamiento puede escribirse como
Conservar lo anterior menor que .000005 requiere que h4 < .000228, o casi h
Este valor es un poco más
grande que el de h = .05 utilizado en la tabla 12.1, pero otros errores entran en nuestros cálculos y por eso
se produce tal resultado.
12.17 El problema anterior sugiere que la tabla 12.2 puede reducirse a la mitad, si se va a utilizar el polinomio
www.elsolucionario.org
164
MÉTODOS NUMÉRICOS
cúbico de Everett para interpolaciones. Encuentre las segundas diferencias necesarias en esta fórmula de
Everett.
El resultado es la tabla 12.4, en la cual las primeras diferencias pueden ignorarse.
Tabla 12.4
δ2
δ
1.00
1.00000
1.10
1.04881
4881
-217
4664
1.20
1.09544
-191
4473
1.30
1.14017
12.18 Use la tabla 12.4 para interpolar en y(1.15).
Con la fórmula de Everett yk-
pk=
(1.09544)-
(-.00191)+ (1.04881)-
(-.00217) = 1.07238
como se listó en la tabla 12.2. Esto confirma el problema 12.6 en este caso.
12.19 Estime el error de truncamiento en una fórmula de quinto grado.
Suponga los argumentos de colocación con igual espaciamiento y en
fórmula de Everett. (La posición es en realidad poco importante.)
El factor del numerador, en 0 < k < 1, toma un valor absoluto máximo de
barse fácilmente, haciendo
como en la
en k -
como puede compro­
12.20 Para la función
¿de qué tamaño un intervalo h es consistente con una precisión de cinco
lugares si se va a utilizar la fórmula de Everett de quinto grado en interpolaciones?
Para esta función, y (6) (x) - 11/12
quiriendo una precisión de cinco lugares,
Sustituyendo esto en el resultado del problema previo y re­
1 225
720 64
945
64
.000005
www.elsolucionario.org
12
INTERPOLACIÓN
16S
aproximadamente. El intervalo permitido con la interpolación de quinto grado excede des­
produciendo h
de luego al correspondiente a la interpolación de tercer grado.
12.21 Para la función y(x) = sen x, ¿de qué tamaño un intervalo h es consistente con una precisión de cinco
lugares si se va a utilizar una fórmula de Everett de quinto grado en interpolaciones?
Para esta funcióny(6)(x) está acotada en forma absoluta por 1, así que necesitamos
.000005, lo que da como resultado h .317. Éste es el equivalente de intervalos de 18°, y significa que ¡só­
lo cuatro valores de la función seno, además de sen 0 y sen 90°, se necesitan para cubrir todo este interva­
lo básico!
12.22 Una segunda fuente de error en el uso de nuestras fórmulas para el polinomio de colocación (siendo la
primera fuente el error de truncamiento) es la presencia de inexactitudes en los valores de los datos. Si, por
ejemplo, el número yk se obtiene mediante una medición física será inexacto debido a las limitaciones im­
puestas por el equipo, y si se obtiene por medio de cálculos contendrá probablemente errores de redondeo.
Muestre que la interpolación lineal no aumenta tales errores.
El polinomio lineal puede escribirse en la forma de Lagrange,
p = ky1 + (1 - k)y0
donde las yk son, como es usual, los valores de los datos reales. Suponga que estos valores son impreci­
sos. Con Y1 y Yo denotando los valores exactos pero desconocidos, podemos escribir
Y0 = y0 + e0
Y 1 =y 1 + e1
donde los números e0 y e1 son los errores. Por lo tanto, el resultado exacto deseado es
ocurriendo el error de nuestro resultado calculado
P-p = ke1 + (l-k)e0
Si los errores ek no exceden E en magnitud, entonces
para 0 < k < 1. Esto significa que el error en el valor p calculado no excede el máximo error de los datos. No
ocurre incremento de error.
12.23 Estime el incremento de las inexactitudes de los datos debido a la interpolación cúbica.
Empleando de nuevo la forma lagrangiana pero suponiendo argumentos espaciados en k = - 1 , 0, 1,
2, el polinomio cúbico puede escribirse como
p=
k(k-l)(k-2)
-6
y-1
(k + l)(k - l)(k - 2)
2
y0
(k + 1)k(k - 2)
-2
y1
(k + l)k(k - 1 )
y2
6
Como en el problema 12.22, dejamos Yk= yk+ek1 con Yk denotando los valores exactos de los datos.
www.elsolucionario.org
166
MÉTODOS NUMÉRICOS
Si P representa nuevamente el resultado exacto que se desea, el error es entonces
P-p =
k(k - 1)(k - 2)
e-1
-6
(k + l ) ( k - l ) ( k - 2 )
2
e0
(k + l)k(k - 2)
-2
e0
(k + l)k(k - 1)
e2
6
Note que para 0 < k < 1 los errores e_, y e2 tienen coeficientes negativos, en tanto que los otros dos tienen
coeficientes positivos. Esto significa que si los errores no exceden E en magnitud,
que se simplifica en
No es una sorpresa que el factor de incremento cuadrático
tome su máximo en
y así
E. El error de los datos E puede ser incrementado por un factor de Ésta es, desde luego, una
estimación pesimista. En ciertos casos los errores pueden incluso anularse entre sí, haciendo más preciso
el valor calculado p que los datos
12.24 ¿Qué otras fuentes de error hay en la interpolación?
Una fuente que es muy importante tomar en cuenta, aun cuando con frecuencia está por completo
fuera de nuestro control, es la continua necesidad de efectuar redondeos durante la realización del algorit­
mo. Esto no puede evitarse cuando se trabaja con un número limitado de dígitos. Nuestras diferentes
fórmulas, aun cuando representen en forma exacta el mismo polinomio de colocación, procesan los datos
incluidos de maneras diferentes. En otras palabras, representan algoritmos diferentes. Tales fórmulas acep­
tan los mismos errores de entrada (inexactitudes de los datos) y pueden tener el mismo error de trunca­
miento aunque sigan difiriendo en la manera en que se desarrollan los redondeos.
Fig. 12-3
12.25 Describa cómo puede utilizarse la serie de Taylor en la interpolación.
Considere la función ye'. Pero la serie de Taylor,
ex+1 = ex • e1 = ex(1 + t+
+ • • •)
Suponga que el factor ex se conoce. El truncamiento de la serie después del término t2 significa un error
(dentro del paréntesis) a lo más de
donde h es el intervalo en el cual se distribuyen los argumentos
en la tabla. Esto supone que la interpolación se basará siempre en la entrada tabular más cercana. Si h -
www.elsolucionario.org
167
INTERPOLACIÓN
.05, este error es
Esto significa que, al interrumpir en el término t2, se obtendrá la preci­
sión hasta cinco dígitos (no lugares decimales) en el valor computado de ex+t. Por ejemplo, utilizando los
datos dé la tabla 12.5 la interpolación en e2.718 es como sigue. Con f = .018,1 +
=
1.01816 y
e2.718 = e2.70(1.01816) = (14.880)(1.01816) = 15.150
que es correcto hasta cinco dígitos. Nuestros polinomios de colocación también darían este resultado.
Tabla 12.5
2.60
2.65
2.70
2.75
2.80
13.464
14.154
14.880
15.643
16.445
12.26 ¿Cómo puede utilizarse la interpolación de ¡a serie de Taylor para la función y(x) - sen x?
Puesto que sen x y cos x suelen tabularse juntos, podemos expresar
sen
= sen x± cos x-
senx
Aquí, por supuesto, t se mide en radianes. Si el intervalo tabular es h - .0001, como lo es en la serie NBSAMS 36, del cual es un extracto la tabla 12.6, la fórmula anterior producirá una precisión de hasta nueve dí­
gitos, puesto que
está más allá del doceavo lugar.
Tabla 12.6
X
senx
cosx
1.0000
1.0001
1.0002
1.0003
.8414 70985
.8415 25011
.8415 79028
.8416 33038
.5403 02306
.5402 18156
.5401 34001
.5400 49840
12.27 Calcule sen 1.00005 mediante la interpolación de la serie de Taylor.
Con x =1 y t = .00005,
sen 1.00005 = .8414 70985 + (.00005)(.5403 02306) 12.28 Aplique la fórmula regresiva de Newton a la predicción de
(.8414 70985) = .8414 97999
en la tabla 12.2.
Con k = 0 en x0 = 1.30 encontramos k = (1.32 -1.30)/.05 - .4. Sustituyendo en la fórmula de Newton,
p = 1.14017 + (.4)(.02214) + (.28)( - .00045) + (.224)(.00003) = 1.14891
www.elsolucionario.org
168
MÉTODOS NUMÉRICOS
que es correcto a medida que se avanza. La fórmula regresiva de Newton parece ser la elección natural para tales problemas de predicción, ya que el suministro de diferencias disponibles es mayor para esta fórmula y pueden introducirse términos de diferencia hasta que ya no contribuyan a los lugares decimales retenidos. Esto permite elegir el grado del polinomio de aproximación conforme avanza el cálculo.
12.29 Analice el error de truncamiento en la predicción.
El error de truncamiento del polinomio de colocación puede expresarse como
k{k + l ) - - - ( k + n ) ,
.,
.
+ n/t.x
donde los puntos de colocación se encuentran en k = 0, -1
-n como en el caso en el que se utilizó la
fórmula regresiva de Newton. Para la predicción, k es positiva. El factor del numerador crece rápidamente
con el aumento de k, y en forma más rápida cuando n es grande, como sugiere la figura 12-4. Esto indica
que el error de truncamiento no se tolerará más allá de cierto punto, y que es peligrosa la predicción más
allá del final de la tabla, como podría suponerse. El error de truncamiento de un polinomio de colocación os­
cila entre los puntos de colocación, pero fuera de este intervalo se vuelve muy grande.
Fig. 12-4
12.30 Prediga
a partir de la tabla 12.2.
Con/t = (1.50-1.30)/.05 = 4,
p = 1.14017 + (4)(.02214) + (10)(-. 00045) + (20)(.00003) = 1.22483
en tanto que el resultado correcto es 1.22474. Nótese también que los términos de diferencias de mayor or­
den, que creemos que de todos modos tendrán efectos de error, sólo harían menos exacto el resultado de­
bido a que son positivos.
Problemas suplementarios
12.31 A partir de los datos de la tabla 12.1 obtenga
por interpolación lineal, hasta cuatro lugares
decimales. ¿El término de la segunda diferencia afectaría el resultado? ¿Afectarían los términos de mayor
orden?
www.elsolucionario.org
INTERPOLACIÓN
169
por interpolación lineal. Nótese que si la fórmula
12.32 A partir de los datos de la tabla 12.1 obtenga
regresiva de Newton se utiliza (con k = 0 en x = 1.05) no se dispondría de ninguna diferencia segunda en
este caso.
12.33 Interpole para
en la tabla 12.2.
12.34 Interpole para
en la tabla 12.2.
12.35 Aplique la fórmula de Stiriing para obtener
cuerda con el del problema 12.8?
a partir de los datos de la tabla 12.2. ¿El resultado con­
12.36 Aplique la fórmula de Everett a la tabla 12.3 y obtenga y(.315).
12.37 Aplique la fórmula de Lagrange para interpolar en y (1.50) empleando aigunos de los siguientes valores de
la función de error normal,
1.00
1.20
1.40
1.60
1.80
2.00
.2420
.1942
.1497
.1109
.0790
.0540
El resultado correcto es .1295.
12.38 Utilice la fórmula de Lagrange para la interpolación inversa del número x correspondiente a y = .1300 en los
datos del problema 12.37.
12.39 Aplique el método del problema 12.12 a la interpolación inversa del problema 12.38.
12.40 Aplique la fórmula de Bessel para obtener y(1.30), y(1.50), y y(1.70) para los datos del problema 12.37.
12.41 En una tabla de la función y(x) = sen x hasta cuatro lugares decimales, ¿cuál es el intervalo h más grande
consistente con la interpolación lineal? (Manteniendo el error de truncamiento por debajo de .00005.)
12.42 En una tabla de y(x) = sen x de hasta cinco lugares, ¿cuál es el intervalo h más grande consistente con la
interpolación lineal? Compare estas estimaciones con las de las tablas conocidas de la función seno.
12.43 Si se usó el polinomio cúbico de Everett para interpolación, en vez de un polinomio lineal, ¿de qué tamaño
podría utilizarse un intervalo h en una tabla de cuatro lugares decimales de y(x) = sen x? ¿En una tabla de
cinco lugares decimales?
12.44 En una aproximación cuadrática con la fórmula de Newton, la función k(k - 1)(k - 2) aparece en la
estimación del error de truncamiento. Muestre que esta función tiene la forma indicada en la figura 12-5 y
que para 0 < k < 2 no excede a
en valor absoluto.
12.45 La función k(k2 -1)(k2- 4) aparece en la estimación del error de truncamiento para la fórmula de Stirling.
Elabore una gráfica de la misma para -2 < k < 2 y estime su máximo valor absoluto para
que es
el intervalo en el cual suele limitarse el uso de esta fórmula.
www.elsolucionario.org
170
MÉTODOS NUMÉRICOS
Fig. 12-5
12.46 Muestre que los máximos y mínimos relativos de los polinomios
k(k2 - l)(k2 - 4)
k(k2 - l)(k2 - 4)(k2 - 9)
aumentan en magnitud cuando sus distancias al intervalo -1 < k < 1 se incrementan. Estos polinomios apa­
recen en el error de truncamiento para la fórmula de Stirling. La implicación es que esta fórmula es más pre­
cisa en el centro del intervalo de colocación.
12.47 Muestre que los máximos y mínimos de los polinomios
(k + 1)k(k - 1)(k - 2)
(k + 2)(k + 1)k(k - 1)(k - 2)(k - 3)
aumentan en magnitud con la distancia al intervalo 0 < k < 1. Estos polinomios aparecen en el error de trun­
camiento correspondiente a la fórmula de Everett o de Bessel. La implicación es que estas fórmulas son
más precisas sobre este intervalo central.
12.48 ¿De qué tamaño es consistente un intervalo h, con la interpolación mediante la fórmula de quinto grado de
Everett, si se requiere la función y(x) = log x y una precisión de cinco lugares?
12.49 Estime el incremento debido a la interpolación de segundo grado en las inexactitudes de los datos. Siga los
argumentos de los problemas 12.22 y 12.23, con 0 < k < 1.
12.50 Estime el incremento debido a una interpolación de cuarto grado en las inexactitudes de los datos, con 0 <
k<1.
12.51 Aplique la fórmula de Stirling para calcular y(2.718) a partir de los datos de la tabla 12.5.
12.52 Calcule sen 1.00015 a partir de los datos que se proporcionan en la tabla 12.6.
12.53 Muestre que la interpolación de la serie de Taylor
log (X + t) = logx + log
=logx+
+•••
puede truncarse después del término t2 con una precisión de seis lugares decimales para 1 < x, siempre que
el espaciamiento tabular sea h = .01.
12.54 Use la fórmula regresiva de Newton y prediga
www.elsolucionario.org
a partir de los datos de la tabla 12.2.
INTERPOLACIÓN
12.55 Prediga
171
a partir de los datos de la tabla 12.4.
12.56 Grafique el error del polinomio cuadrático del problema 6.14. Muestre que el error es igual a cero en x = - 3 ,
así como en los puntos de colocación. ¿Cómo se explica esto en términos de nuestra fórmula de error de
colocación
12.57 En el problema 6.15, ¿cómo se explica el error igual a cero en x = 4 en términos de la fórmula de error
12.58 Use el resultado del problema 10.15 para estimar el valor faltante y'(1).
12.59 Emplee el resultado del problema 10.16 para estimar el valor faltante y"(1).
12.60 Utilice el resultado del problema 10.17 para estimar los valores faltantes y'(0) y y'(1).
www.elsolucionario.org
Diferenciación
numérica
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el concepto y la utilidad de la diferenciación numérica (Introducción).
2. Explicar con sus propias palabras las fuentes de error involucradas en la diferendación numérica
(Introducdón).
3. Explicar con sus propias palabras en qué consiste la fórmula progresiva de Newton para la
diferenciadón numérica (Introducdón).
4.
Explicar con sus propias palabras en qué consiste la fórmula de Stirling para la diferendación numérica
(Introducdón, Problemas 13.3,13.4).
5. Explicar con sus propias palabras en qué consiste la fórmula regresiva de Newton para la
diferenciadón numérica (Introducdón).
6. Desarrollar matemáticamente la fórmula progresiva de Newton para la diferendación numérica y
aplicarla en problemas de ejemplo (Problemas 13.1,13.2).
7. Desarrollar matemáticamente la fórmula de Stirling para la diferenciadón numérica y aplicarla en
problemas de ejemplo (Problemas 13.3 a 13.5,13.8,13.26,13.27).
8. Desarrollar matemáticamente la fórmula regresiva de Newton para la diferenciadón numérica y
aplicarla en problemas de ejemplo (Problemas 13.1,13.2).
9. Explicar las diferencias en su forma y en su aplicación entre las fórmulas progresiva y regresiva de
Newton para la diferenciación numérica.
10. Aplicar y comparar la fórmula de Newton con la de Stirling (Problema 13.6).
11. Estimar el error por truncamiento propidado por la fórmula de Newton (Problema 13.6).
12.
Estimar el error por redondeo propiciado por la fórmula de Newton (Problema 13.6).
13. Estimar el error por truncamiento propiciado por la fórmula de Stirling (Problemas 13.6,13.7,13.9,
13.14 a 13.18,13.31,13.32).
14. Estimar el error por redondeo propidado por la fórmula de Stirling (Problemas 13.6,13.10 a 13.14,
13.31,13.33).
15. Desarrollar matemáticamente la fórmula de Bessel para la diferendación numérica (Problema 13.22).
16. Aplicar la fórmula de Bessel para la diferenciación numérica en problemas de ejemplo (Problema
13.23).
17. Estimar el error por truncamiento propiciado por la fórmula de Bessel (Problema 13.24).
18.
Estimar el error por redondeo propiciado por la fórmula de Bessel (Problema 13.25).
19. Obtener la derivada de una función en un punto, por medio de diferendas.
www.elsolucionario.org
DIFERENCIACIÓN NUMÉRICA
173
20. Explicar con sus propias palabras cómo puede aplicarse la extrapolación de Richardson en la
diferenciación numérica (Problemas 13.20,13.21).
21. Explicar con sus propias palabras cómo se emplea la fórmula de interpolación de Lagrange con
puntos equiespaciados para obtener fórmulas de diferenciación numérica (Capítulo 12).
22. Aplicar la fórmula de interpolación de Lagrange con puntos equiespaciados para obtener fórmulas
de diferenciación numérica (Capítulo 12).
23. Encontrar, mediante la utilización de la interpolación por segmentos, la derivada aproximada de la
función seno (Problema 13.19).
24. Aplicar, de acuerdo con su criterio y con los conocimientos adquiridos en este tema, el método de
diferenciación que considere más conveniente en problemas de ejemplo (Capítulo 12, Problemas
13.28 a 13.30).
APLICACIONES DE LA DIFERENCIACIÓN NUMÉRICA
Éste es el segundo tema propiamente de la esencia de los métodos numéricos, ya que en repetidas ocasiones
podremos necesitar la derivada de una función en un punto, como lo hemos visto en muy diversos problemas
de ingeniería en general y de otras disciplinas tales como economía, mercadotecnia, teoría de inventarios, optimización, etc.
En problemas de física, la primera derivada representa la velocidad y la segunda representa la acele­
ración.
El significado de la derivada de una función con respecto a la variable independiente (que en términos ge­
nerales es X) es la pendiente de la recta tangente a la función en un punto determinado. La pendiente de una
función nos expresa la razón de cambio instantánea de la función con respecto a la variable independiente. Por
tanto la derivada nos va a mostrar el incremento o decremento según sea el caso, en el valor de la función (varia­
ble dependiente f(X) o Y) por unidad de incremento en la variable independiente. En otras palabras decimos que
la derivada es la razón de cambio de f(X) con respecto a X.
Al proceso de encontrar la derivada, dada una función, se le llama diferenciación. Dentro de los cursos de
cálculo hemos aprendido las fórmulas para derivar funciones, sin embargo, dentro de los métodos numéricos
aprenderemos nuevas formas de hacerlo, ya que no es muy común introducir dentro de una computadora o una
calculadora dichas fórmulas para encontrar la derivada de una función en general o evaluada en un punto.
Asimismo, en este tema veremos además de métodos para obtener la primera derivada, otros métodos
cuando requerimos derivadas de órdenes superiores.
Con la primera derivada de una función sabremos si ésta es creciente o decreciente, son la segunda de­
rivada sabremos si nos encontramos en un máximo, en un mínimo o en un punto estacionario y también con
la segunda derivada sabremos si es o no un punto de inflexión (punto donde la función cambia de creciente a de­
creciente o viceversa).
Dentro de los problemas suplementarios se incluye un problema de física y un problema de inventarios.
Cabe mencionar que en los temas de solución de ecuaciones no lineales (Capítulo 25) veremos la evalua­
ción de polinomios mediante división sintética, la cual nos proporciona la primera derivada evaluada en un punto;
la división sintética y el teorema del factor se vieron en el capitulo 2.
Debido a que la diferenciación numérica nos da una gran tendencia hacia el error, es conveniente evitarla
en lo posible y esto es particularmente verdadero cuando los valores de f(X) están sujetos a algún tipo de error co­
mo probablemente ocurriría si se han determinado experimentalmente (los ingenieros y los científicos de hecho,
www.elsolucionario.org
174
MÉTODOS NUMÉRICOS
usan a menudo pruebas de diferenciación sobre los datos de laboratorio para tener indicios de precisión experimental).
Si fuera indispensable calcular derivadas en tales casos (datos experimentales con error inherente), particularmente cuando los resultados se van a emplear en cálculos posteriores, resulta mucho mejor emplear algún método de suavización de curvas que minimice el error inherente en los datos y posteriormente derivar el polinomio
resultante; este método llamado "aproximación polinomial mediante mínimos cuadrados", se encuentra en el capítulo 21.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas
Manejo de funciones discretas
Diferencias finitas
Polinomios factoriales
Sumas (sumatorias)
Sumas y series
El polinomio de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equiespaciados
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Casos especiales en la integración numérica
www.elsolucionario.org
2
10
11
13
14
21
22
23
24
3
4
5
17
6
7
8
9
12
13
14
15
16
DIFERENCIACIÓN NUMÉRICA
175
DERIVADAS APROXIMADAS
Las derivadas aproximadas de una función y(x) pueden encontrarse a partir de una aproximación polinomial p(x)
aceptando simplemente p', p(2), p ( 3 ) ,... en lugar de y', y(2), y(3) Nuestros polinomios de colocación conducen a
una amplia variedad de útiles fórmulas de este tipo. Las tres bien conocidas fórmulas
y(x)
y(x + h)-y(x)
h
y'(x)
y(x
+ h)-y(x-h)
2h
y'(x)
y(x)-y(x-h)
h
se obtienen diferenciando las fórmulas progresiva de Newton, de Stirling y regresiva de Newton, respectivamente,
empleándose sólo un término en cada caso. Pueden disponerse fórmulas más complicadas utilizando simplemen­
te más fórmulas. Por consiguiente
surge de la fórmula de Newton, en tanto que
se produce diferenciando la de Stirling. Otras fórmulas de colocación dan como resultado aproximaciones similares. Para las segundas derivadas un resultado muy conocido es
y proviene de la fórmula de Stirling. Conservando sólo el primer término, tenemos la conocida
y(2)(x)
y(x + h)
2y(x) + y(x-h)
h2
FUERTES DE ERROR EN UNA DIFERENCIACIÓN APROXIMADA
El estudio de los casos de prueba sugiere que las derivadas aproximadas que se obtienen a partir de polinomios
de colocación debe verse con escepticismo a menos de que se dispongan de datos muy precisos. Incluso en ese
caso la precisión disminuye con el aumento del orden de las derivadas.
La dificultad básica es que y(x) -p(x) puede ser muy pequeño en tanto que y'(x) -p'(x), muy grande. En len­
guaje geométrico, dos curvas pueden estar muy cerca una de la otra pero tener pendientes muy diferentes. Tam­
bién están presentes todas las demás fuentes de error, incluso errores de entrada en los valores yi, errores de
truncamiento tales como y - p', y(2) - p(2), etc., y redondeos internos.
La fuente de error dominante son los propios errores de entrada. Éstos son críticos, aun cuando sean peque­
ños, debido a que los algoritmos los incrementan enormemente. Un factor clave en este incremento es la potencia
reciproca de h que se presenta en las fórmulas, multiplicando tanto a los valores verdaderos como a los errores
que se fusionan entre sí para conformar los datos yi. En algunas ocasiones puede hacerse una elección óptima del
intervalo h. Puesto que el error de truncamiento depende directamente de h, en tanto que el incremento del error
depende inversamente, es posible utilizar el método usual de cálculo para minimizar la combinación.
www.elsolucionario.org
176
MÉTODOS NUMÉRICOS
Deben esperarse grandes errores en las derivadas aproximadas que se basan en los polinomios de colocación. Siempre que sea posible será necesario obtener cotas de error. Los métodos alternativos para la diferenciación aproximada pueden basarse en polinomios obtenidos mediante mínimos cuadrados o procedimientos de
minimax más que por colocación. (Véanse los capítulos 21 y 22.) Puesto que estos métodos también ajustan los
datos proporcionados, resultan más satisfactorios. La aproximación trigonométrica (Capítulo 24) brinda aun otra alternativa.
Problemas resueltos
13.1
Diferencie la fórmula progresiva de Newton,
pk=y0+
Δ2y0+
Δy0+
Δ3y0+ Δ4y0+• • •
Los números de Stirling pueden usarse para expresar los factoriales como potencias, después de lo
cual, un sencillo cálculo produce las derivadas relativas a k. Empleando de nuevo el operador D para re­
presentar tales derivadas, Dpk,
D2pk
utilizamos la conocida x = x0 + kh para obtener derivadas relati­
vas al argumento x.
p'(x)=
Dpk
h
p(2)(x) =
D2pk
h2
Los resultados son
13.2
Δ2y0 +
3k2-6k + 2 3
2k3-9k2 + 1 1 k - 3 4
Δ y0 +
Δ y0 +
6
12
p'(x) =
Δy0 +
p ( 2 ) (x)=
Δ2y0 + ( k - l ) Δ 3 y 0 +
p(3)y0=
Δ3y0 +
P(4)(x) =
(Δ4y0+ • • •)
2k-3
2
6k 2 -18k + ll 4
Δ y0 +
12
Δ4y0 +
y así sucesivamente
Aplique las fórmulas del problema 13.1 para producir p'(1), p(2)(1) y P(3)(1) a partir de los datos de la tabla
13.1. (Ésta es la misma tabla 12.2 pero con las diferencias mayores de tercer orden suprimidas.
Recuérdese que aquellas diferencias se escribieron como efectos de error. La tabla se reproduce aquí por
comodidad.)
www.elsolucionario.org
177
DIFERENCIACIÓN NUMÉRICA
Tabla 13.1
1.00
1.00000
1.05
1.02470
2470
-59
2411
1.10
1.04881
1.15
1.07238
1.20
1.09544
1.25
1.11803
1.30
1.14017
5
-54
2357
4
-50
2307
2
-48
2259
3
-45
2214
Con h = .05 y k = 0 en x0 = 1.00, nuestras fórmulas producen
p'(1) = 20(.02470 + .000295 + .000017) = .50024
p (2) (l) = 400(-.00059 - .00005) = - .256
p (3) (l) = 8000(.00005) = .4
Los resultados correctos son, puesto que
A pesar de que ios datos de entrada son exactos hasta en cinco lugares decimales, encontramos
p'(x) sólo correcta hasta tres lugares decimales, p(2),(1) no muy correcta hasta en dos lugares y p (3) (1) sólo
correcta hasta uno. Es evidente que los errores de algoritmo son considerables.
13.3
Diferencie la fórmula de Stirling,
Pk = y0 +
δ2y0 +
δμy0 +
δ3μy0 +
δ4y0+• • •
Procediendo como en el problema 13.1, encontramos
13.4
3k 2 -1 3
2k3-k 4
δ μy0
δ y0 +
12
6
p'(x)=
δμy0 + kδ2y0
P(2) (X) =
δ2y0 + kδ3μy0
P(3)(x)
(δ3μy0 + kδ4y0
p (4) (x)=
(δ 4 y 0 +
6k2-1
12
δ4y0
y así sucesivamente
Aplique las fórmulas del problema 13.3 para producir p '(1.10), p ( 2 ) (1 .10) y p (3) (1.10) a partir de los datos
de la tabla 13.1.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
178
Con k = 0 en x0 = 1.10, nuestras fórmulas producen
p'(l-10) = 20
02411+ .02357
.00005 + .00004
2
o
2
.4766
p(2)(1.10) = 400(-.00054 + 0) = -.216
p(3)(1.10) = 8000(.000045) = .360
Los resultados correctos son y'(1.10) = .47674, y(2) (1 .10) = -.2167 y y(3)(1.10) = .2955.
Los datos de entrada fueron correctos hasta en cinco lugares decimales, pero nuestras aproximacio­
nes a estas tres primeras derivadas son correctas en forma aproximada hasta en cuatro, tres y un lugar,
respectivamente.
13.5
Los problemas anteriores sugieren que la diferenciación aproximada es inexacta. Amplíe este punto com­
parando la función y(x) = e sen (x/e2) con la aproximación polinomial p(x) - 0.
Las dos funciones se colocan en los argumentos igualmente espaciados x - ie2π para enteros i. En el
caso de un número β muy pequeño, la aproximación es extremadamente exacta, sin que y(x) - p(x) exceda
nunca a e. Sin embargo, puesto que y'(x) = (1/e) cos (x/e2) y p'(x) = 0, la diferencia en las derivadas es
muy grande. Este ejemplo muestra que la aproximación exacta de una función no debe esperarse que equi­
valga a la aproximación precisa de su derivada. Véase la figura 13-1.
Fig. 13-1
13.6
Los problemas 13.1,13.3 y 13.23 sugieren tres aproximaciones a y'(x) usando sólo las primeras diferencias,
y1-y0
h
y1-y-1
2h
y0-y-1
h
Estas, interpretadas geométricamente, son las pendientes de las tres líneas que se muestran en la figura 13-2.
También se muestra la linea tangente x0. Parece ser que la aproximación de en medio es la más cerca­
na a la pendiente de la línea tangente. Confirme esto computando los errores de truncamiento de las tres
fórmulas.
Fig. 13-2
www.elsolucionario.org
DIFERENCIACIÓN NUMÉRICA
179
La fórmula progresiva de Newton, truncada después del primer término de diferencia, deja el error de
truncamiento como
con x = x0 + kh como es usual. Es útil considerar aquí a k como un argumento continuo, y no restringido a
valores enteros. Suponiendo continua y(2)(ξ), encontramos entonces el error de nuestra fórmula de la deriva­
da (por la regla de la cadena) para k=0.
Nótese que para k = 0 la derivada del factor problemático y ( 2 ) (ξ) no está comprendida. De manera similar
para la fórmula regresiva de Newton,
Con ia fórmula de Stirling se recibe un beneficio inesperado. Conservando incluso el segundo término
de diferencia en nuestra aproximación encontramos que en k = 0 este término desaparece de p'(x). (Véase
el problema 13.3.) De tal modo podemos considerar ia aproximación media bajo análisis como si surgiera
de una aproximación polinomial de segundo grado. El error de truncamiento es por tanto
que conduce a
Es cierto que el símbolo ξ representa probablemente tres números distintos desconocidos en estos tres
cálculos. Pero puesto que h suele ser pequeño, la apariencia de h2 en el último resultado, en comparación
con h en los otros, sugiere que este error de truncamiento es más pequeño, por un "orden de magnitud".
Esto confirma la evidencia geométrica.
13.7
Aplique la fórmula media del problema 13.6 para aproximar y'(1.10) con respecto a los datos de la tabla
13.1. Encuentre el error real de este resultado y compárelo con la estimación del error de truncamiento del
problema 13.6.
Esta aproximación es en realidad el primer término computado en el problema 13.4: y'(1.10) = .4768.
El error real es, hasta en cinco lugares,
y'(l. 10) - .4768 = .47674 - .47680 = - .00006
La estimación que se obtuvo en el problema 13.6 fue h2y(3)(ξ)/6. Puesto que y (3) (x) = x - 5 ' 2 sólo
exageramos un poco al sustituir la ξ desconocida por 1, obteniendo -h 2 y (3) (ξ)/6 = = -.0016. Esta
estimación es grande, pero no irrealista.
www.elsolucionario.org
180
13.8
MÉTODOS NUMÉRICOS
Convierta la fórmula para p'(x) obtenida en el problema 13.3 en una forma que exhiba los valores yk
utilizados en vez de las diferencias.
Tenemos k - 0 para este caso, haciendo
(y1-y-1)
13.9
( y - 2 - 8 y - 1 + 8y1-y2)
(y2 — 2y1 + 2y-1 — y_2)
Estime el error de truncamiento en la fórmula del problema 13.8.
Puesto que la fórmula se basó en el polinomio de Stirling de cuarto grado,
Diferenciando como en el problema 13.6 y dejando
13.10 Compare la estimación del problema 13.9 con el error real del resultado calculado en el problema 13.4.
Hasta en cinco lugares el error real es
y'(1.10) -p'(1.10) = .47674 - .47660 = .00014
en tanto que la fórmula del problema 13.9, con y (5) (1) sustituyendo el valor desconocido
nando una ligera exageración, produce
30
(.05) 4
7
64
y ocasio­
=.0000007
¡Sin duda esto no es lo que se esperaba! Aunque el error de truncamiento se ha eliminado esencialmente
utilizando diferencias de mayor orden, el error real es más grande. Es claro que otra fuente de error domina
en estos algoritmos. Dicha fuente son los errores de entrada de los valores y¡ y se observa cómo se incre­
mentan con el algoritmo. Por brevedad incluiremos esto en el término del error de redondeo.
13.11 Estime el comportamiento del error de redondeo para la fórmula (y1 - y-1)/2h.
Como antes, dejamos que Y1, y Y-1 sean los valores exactos (desconocidos) de los datos. Entonces
Y1 = y1 + e1 y Y-1 = y-1 + e-1 con e1 y e-1 representando los errores de los datos. La diferencia
es en consecuencia el error en nuestra salida debido a las inexactitudes de entrada. Si
E en magnitud, este error de salida es entonces en el peor de los casos
haciendo de
error de redondeo.
no excede a
el máximo
13.12 Aplique la estimación del problema 13.11 al cálculo del problema 13.7.
Aquí
puede influir ligeramente en el cuarto lugar.
De tal modo el error de redondeo en el algoritmo
www.elsolucionario.org
DIFERENCIACIÓN NUMÉRICA
181
13.13 Estime el comportamiento del error de redondeo en la fórmula del problema 13.8.
Procediendo del mismo modo que en el problema 13.10 encontramos (1/12h)(e-2 - Be-1 + Be1 - e-2)
para el error en la salida debido a las inexactitudes de entrada. Si ek no excede a E en magnitud, entonces
este error de salida es en el peor de los casos 18E/12h, es decir, el error de redondeo máximo - (3/2h)E.
El factor (3/2h) es el factor de incremento, como (1/h) lo fue en el problema 13.11. Nótese que para h pe­
queño, lo que por lo general se asocia con una gran exactitud, este factor es considerable y los errores de
redondeo en la información de entrada se incrementarán de manera importante.
13.14 Aplique la estimación del problema 13.13 al cálculo del problema 13.14. Compare después los diversos
errores asociados con nuestros intentos para calcular y'(1.10).
Con h - .05 y E = .000005, (3/2h)E = .00015. Los diversos errores se agrupan en la tabla 13.2.
Tabla 13.2
Fórmula
Error real
-.00006
,00014
Error de trunc. est Max. error de red.
-.00016
.0000007
±.00010
±.00015
En el primer caso el error de redondeo ha ayudado, pero en el segundo caso ha perjudicado. Es daro que
el alto incremento de tales errores hace que no tengan sentido los bajos errores de truncamiento, excepto
para datos en extremo precisos.
13.15 Estime el error de truncamiento de la fórmula
que se obtiene a partir del problema 13.3 interrumpiendo después del segundo término de diferencia.
Aquí puede ser conveniente seguir una ruta diferente para el error de truncamiento, empleando la se­
rie de Taylor. En particular
de manera que al sumarlas y restar después 2y0 encontramos
Desafortunadamente ξ, es probable que no sea el mismo que ξ2 pero para una estimación del error de trun­
camiento supóngase que sustituimos ambas derivadas cuartas por un número y ( 4 ) que podemos elegir arbi­
trariamente. Para tener una seguridad total podríamos elegir y ( 4 ) = máx| y (4 '(x)| sobre el intervalo compren-
www.elsolucionario.org
MÉTODOS NUMÉRICOS
182
dido, lo que nos llevaría a una cota superior para la magnitud del error de truncamiento, si bien podrían ser
posibles otras elecciones. Tenemos ahora
Error de truncamiento
13.16 Aplique la estimación del problema 13.15 al cálculo del problema 13.4.
El cálculo de p (2) (1.10) en el problema 13.4 ya se realizó mediante la fórmula
puesto que los términos de diferencia de mayor orden no contribuyen en nada. El resultado ya se ha com­
parado con el valor correcto y"(1.10) = -.21670. La estimación del error de truncamiento del problema
13.15, con
sugiere una ligera exageración
Error de truncamiento
1
5120
.00020
El error real es -.00070, lo que indica nuevamente que el error de truncamiento no es la principal fuente de
error.
13.17 Estime el error de redondeo de la fórmula δ2y0/h2.
Procediendo como antes, encontramos que el error de salida debido a las inexactitudes de entrada
es (1/h2)(e1 - 2e0 + e-1) donde los ek son los errores de entrada. Si éstos no exceden a £ en magnitud, en­
tonces el error en el peor de los casos puede ser (4/h2)E; de tal modo que el máximo error de redondeo (4/h 2 )E.
13.18 Aplique la fórmula del problema 13.17 al cálculo del problema 13.4 y compare el error real de nuestra
aproximación a y(2)(1 .10) con estimaciones de truncamiento y redondeo.
Como antes h = .05 y E = .000005, haciendo (4/h2)E = .00800.
El factor de magnificación (4/h2) tiene un fuerte efecto. Nuestros resultados confirman que el redondeo
ha sido la principal fuente de error en nuestra aproximación de y (2) (1.10), y sólo ha contribuido con aproxi­
madamente 90 de unas 800 unidades potenciales.
Error real
-.00070
Error de trunc. est.
Max. error de red.
.00020
www.elsolucionario.org
±.00800
DIFERENCIACIÓN NUMÉRICA
183
13.19 Aplique las interpolaciones segmentarias de los problemas 9.7 y 9.8 para encontrar derivadas aproximadas
de la función seno.
En el problema 9.7 encontramos la interpolación segmentaria natural, teniendo segundas derivadas
cero en los puntos extremos. Puesto que la propia función seno tiene estas derivadas en los extremos, la
interpolación segmentaria natural es apropiada en este caso. Tomando primero el punto central, encontra­
mos que la derivada del segmento de interpolación central S2 es
que es precisamente cero en x = π/2. Es claro que la simetría ha sido útil. Puede efectuarse una prueba de
mayor validez en x = π/3, que fue uno de los nudos y en donde encontramos que S'2 corresponde a .496. El
error de .4 por ciento puede juzgarse considerando que sólo se utilizaron tres interpolaciones segmentarias
sobre el intervalo (0, π).
En el problema 9.8 encontramos la interpolación segmentaría que corresponde al punto extremo de la
primera derivada de la función seno. Para la sección central encontramos
que es de nuevo cero en x = π/2. En x = π/3, el valor es = 2π)/6π o .494.
Para la segunda derivada aparece otra vez el deterioro anticipado. La interpolación segmentaria natu­
ral predice S"2 = -.948 para el intervalo central completo, donde la segunda derivada verdadera varía
de-.866 a - 1 .
13.20 ¿Cómo puede aplicarse el método de extrapolación de Richardson a la diferenciación numérica?
Como es usual, la información en torno al error en una fórmula de aproximación se usa para efectuar
una corrección. Como un ejemplo tómese la fórmula central
y'(x) =
y(x + k)-y(x-h)
2/h
donde 7 es el error de truncamiento. Con un sencillo cálculo empleando la serie de Taylor se encuentra
T = a1h2 + a2h4 + a3h6 + • • •
Haciendo dos aplicaciones, con el uso de h y h/2, tenemos
con F(h) y F(h/2) denotando las derivadas aproximadas, y donde suponemos que las a, no cambian mucho
para h pequeño. La supresión del término a, produce
www.elsolucionario.org
MÉTODOS NUMÉRICOS
184
de modo que en
tenemos una fórmula de diferenciación aproximada de cuarto orden de precisión, que se obtuvo combinando dos resultados a partir de una fórmula de precisión de segundo orden.
El argumento puede ahora repetirse, empezando con
y eliminando el término b1, para producir una aproximación
15
con una precisión de sexto orden. Es evidente que repeticiones adicionales son posibles, conociéndose el
proceso completo como extrapolación al limite.
El conjunto de aproximaciones calculado durante una extrapolación al límite suele presentarse como
sigue:
h
h/2
h/4
h/8
F(h)
F(h/2)
F(h/4)
F(h/8)
F1(h/2)
F1(h/4)
F1(h/8)
F2(h/4)
F2(h/8)
F3(h/8)
añadiéndose más entradas según sea necesario. La fórmula general es:
No es difícil modificar el proceso que acaba de describirse de modo que el tamaño del paso se reduz­
ca de alguna otra manera, tal vez h1 = ri-1h), con h1 como la h inicial. Una secuencia arbitraria de hi podría in­
cluso manejarse a bajo costo. Existen ejemplos con los que se muestra que algunas veces estas variacio­
nes pueden ser provechosas.
13.21 Aplique la extrapolación de Richardson a la función y(x) = -1/x para determinar y'(.05). El valor es 400.
Los cómputos se resumen en la tabla 13.3 y se efectuaron con una computadora de ocho dígitos. La
fórmula original del problema 13.20 produce la columna encabezada con la letra F (reduciéndose todas las
entradas de la tabla en 400), porque su mejor intento, para h = .0001, estuvo fuera del tercer lugar decimal.
Después de eso el error de redondeo fue el dominante. Observando en cualquier parte de la tabla se en­
cuentra que aparecen valores casi correctos hasta cinco lugares.
www.elsolucionario.org
DIFERENCIACIÓN NUMÉRICA
1S5
Tabla 13.3*
28.05289
6.66273
1.64515
.41031
.10250
.02625
.00750
.00500
.01000
.0128
.0064
.0032
.0016
.0008
.0004
.0002
.0001
.00005
-.46732
-.02737
-.00130
-.00010
.00084
.00125
.00417
.01166
.0096
.00043
-.00002
.00090
.00127
.00436
.01215
.00041
-.00002
.00091
.00127
.00441
.01227
"Entradas reducidas en 400.
Problemas suplementarios
13.22 Diferencie la fórmula de Bessel, obteniendo derivadas hasta p (5) (x) en términos de diferencias hasta de
quinto orden.
13.23 Aplique los resultados del problema anterior para producir, p', p ( 2 ) y p ( 3 ) en x = 1.125 partiendo de los datos
de la tabla 13.1.
13.24 Encuentre el error de truncamiento de la fórmula para p'(x) obtenida en el problema 13.22 utilizando
Estímelo utilizando ξ = 1. Compare el error real.
13.25 Encuentre el máximo error de redondeo posible de ta fórmula del problema anterior. Compare el error real
con las estimaciones de los errores de truncamiento y redondeo.
13.26 Muestre que la fórmula de Stirling de sexto grado produce
Demuestre que el error de truncamiento de esta fórmula es
13.27 Convierta la fórmula del problema anterior a la forma
p'(x 0 )= ( - y - 3 + 9y -2 -45y -1 + 45y 1 - 9y 2 + y 3 )
y pruebe que el máximo error de redondeo es 11E/6h.
www.elsolucionario.org
186
MÉTODOS NUMÉRICOS
13.28 Encuentre el argumento correspondiente a y' = 0 en la tabla 13.4 por interpolación cúbica inversa, usando
la fórmula de Lagrange o la de Everett. (Véanse otra vez los problemas 12.11 y 12.12.) Encuentre después
el valor y correspondiente por la interpolación directa.
Tabla 13.4
1.4
1.5
1.6
1.7
.98545
.99749
.99957
.99166
.16997
.07074
-.02920
-.12884
13.29 Ignorando las líneas superior e inferior de la tabla 13.4, aplique la fórmula de Hermite para encontrar un
polinomio cúbico que se ajuste a los datos restantes. ¿En dónde es igual a cero la derivada de este poli­
nomio cúbico? Compare con el problema anterior. Aquí los datos corresponden a y(x) = sen x, de tal modo
que el argumento correcto es π/2.
13.30 La función de la distribución normal
tiene un punto de inflexión exactamente en x = 1.
¿Qué tan cercanamente ésta podría determinarse, a partir de cada una de las tablas independientes de
cuatro lugares siguientes?
.50
.75
1.00
1.25
1.50
.3521
.98 .2468
.3011
.99 .2444
.2420 1.00 .2420
.1827 1.01 .2396
.1295 1.02 .2371
13.31 Partiendo de los problemas 13.9 y 13.13 encontramos que los errores combinados de truncamiento y
redondeo de la aproximación
tienen la forma Ah4 + 3E/2h donde A = ly(5)(ξ)/30l ¿En el intervalo h éste será será un mínimo? Calcule su
resultado a partir de la función raíz cuadrada y con una precisión de cinco lugares.
13.32 Muestre que el error de truncamiento de la fórmula y(4)(x0) = δ4y0/h4 es h2/(6)(ξ)l6.
13.33 Demuestre que el máximo error de redondeo de la fórmula en el problema 13.38 es 16E/h4.
www.elsolucionario.org
Integración numérica
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el concepto de integración numérica (Introducción, Problema 14.67).
2. Explicar con sus propias palabras las fuentes de error involucradas en la integración numérica
(Introducción).
3. Dar la interpretación geométrica de la integral de una función f(x), sobre un intervalo dado
(Introducción).
4.
Explicar con sus propias palabras en qué consiste la fórmula progresiva de Newton para la
integración numérica (Introducción).
5. Desarrollar matemáticamente y aplicar la fórmula progresiva de Newton para obtener la integración
numérica (Problemas 14.1,14.35,14.36).
6. Explicar con sus propias palabras el concepto de fórmulas compuestas para obtener la integración
numérica (Aplicaciones).
7. Explicar en detalle, con apoyo en una gráfica, el método trapezoidal para calcular numéricamente una
aproximación de la integral de una función (Introducción).
8. Deducir la fórmula del método trapezoidal a partir de la interpretación geométrica de la integral
(Introducción, Problemas 14.4,14.5,14.8,14.17,14.18,14.31,14.37 a 14.40,14.42,14.43,14.46,
14.48 a 14.51).
9. Calcular numéricamente una aproximación de la integral de una función dada, utilizando el método
trapezoidal (Problemas 14.4,14.5,14.8,14.17,14.18,14.31,14.37 a 14.40,14.42,14.43,14.46,14.48
a 14.51).
10. Elaborar el algoritmo para aplicar en forma iterada el método trapezoidal (Introducción).
11. Explicar detalladamente, apoyado en una gráfica, el método Simpson 1/3 para calcular numéricamente
una aproximación de la integral de una función (Introducción).
12. Deducir la fórmula del método Simpson 1/3 a partir de la integración geométrica de la integral
(Problemas 14.10,14.11,14.14 a 14.17,14.19 a 14.22,14.26,14.33,14.39,14.40,14.42,14.44,14.46,
14.48 a 14.51).
13. Calcular numéricamente una aproximación de la integral de una función dada utilizando el método
Simpson 1/3 (Problemas 14.10,14.11,14.14 a 14.17,14.19 a 14.22,14.26,14.33,14.39,14.40,14.42,
14.44,14.46,14.48 a 14.51).
14. Elaborar el algoritmo para aplicar en forma iterada el método Simpson 1/3 (Introducción).
15. Explicar la extrapolación de Richardson a la fórmula trapezoidal, para obtener la fórmula Simpson
1/3 (Capitulo 13).
www.elsolucionario.org
188
MÉTODOS NUMÉRICOS
16. Explicar detalladamente, apoyado en la gráfica, et método de Romberg para calcular numéricamente
una aproximación de la integral de una función (Introducción).
17. Deducir la formula del método de Romberg a partir de la interpretación geométrica de la integral
(Problemas 14.23. t4.24,14.39,14.40,14.42,14.48 a 14.51).
18. Calcular numéricamente una aproximación de la integral de la función dada, utilizando el método de
Romberg (Problemas 14.23,14.24.14.39,14.40,14.42,14.48 a 14.51).
19. Elaborar el algoritmo para aplicar en forma iterada el método de Romberg (Introducción).
20. Estimar el error cometido al realizar la Integración numérica de una función, usando los métodos
nombrados en los objetivos anteriores (Problemas 14.2,14.3,14.6,14.7,14.9,14.12,14.13,14.15.
14.22,14.32,14.41,14.45,14.65,14.66).
21. Explicar con sus propias palabras de qué manera se pueden obtener fórmulas más complejas para
calcular numéricamente una aproximación de la integral de una función (Problemas 14.25,14.61).
22. Explicar con sus propias palabras en qué consiste la fórmula de Gregory para obtener la integración
numérica (Problemas 14.30,14.47).
23. Explicar con sus propias palabras en qué consiste la aplicación del teorema de Taytor para obtener la
integración numérica (Problemas 14.31,14.37,14.38,14.56 a 14.60).
24. Explicar con sus propias palabras cómo se puede aplicar el método de coeficientes indeterminados
para obtener la integración numérica (Problemas 14.34,14.62 a 14.64).
25. Explicar con sus propias palabras en qué consiste el concepto de integración adaptativa (Problemas
14.27 a 14.29,14.52 a 14.55).
APLICACIONES DE LA INTEGRACIÓN NUMÉRICA
Como vimos en ei capitulo 5, las sumas (sumatorias) son una herramienta muy útil en los métodos numéricos,
y mediante ellas podemos calcular áreas.
En este capitulo obtendremos áreas de diversas regiones que no sólo se encuentran acotadas por rectas.
En ei estudio del cálculo hemos visto el concepto de integración, como la suma de rectángulos muy angostos; en este tema aprenderemos métodos que nos permitan ei cálculo de funciones complicadas, mediante computadora o calculadora.
Dentro del estudio del cálculo hemos aprendido las fórmulas para integrar funciones, sin embargo dentro de
los métodos numéricos aprenderemos nuevas formas de hacerlo, ya que no es muy común introducir dentro de una
computadora o una calculadora dichas fórmulas para encontrar la integral definida o indefinida de una función.
Las aplicaciones de la integración son muy variadas, debido a que no sólo se emplean para calcular áreas,
sino para calculan el área comprendida entre dos gráficas, volúmenes de sólidos de revolución, en física para el
cálculo de trabajo, flujo de líquidos, presión de líquidos, centros de masa, momentos de inercia y en otras disciplinas como economía y evaluación de proyectos para cálculos de depreciación, valor presente e inversiones.
Cuando no es posible la evaluación de integrales definidas mediante los métodos formales o cuando tenemos sólo una pequeña muestra de los valores de la función f(X), requeriremos de otro enfoque. La alternativa obvia es encontrar una función g(X) que sea a la vez una aproximación apropiada de f(X) y sencilla para integrarla
formalmente.
Afortunadamente los polinomios de interpolación vistos en el capitulo 12, a menudo nos proporcionan las
dos características requeridas.
La diferencia entre f(X) y g(X), nos da diferentes signos en los segmentos del intervalo de integración, por lo
que usualmente el error total de la integración se hace pequeño, ya que los errores positivos en unos segmentos
www.elsolucionario.org
INTEGRACIÓN NUMÉRICA
189
tienden a cancelar los negativos en otros; ésta es la razón por la cual se dice que la integración es un proceso de
suavización.
Existen muchas fórmulas para la integración numérica (amada también cuadratura), debido a que tenemos
muchas posibilidades para seleccionar el espaciamiento de los puntos base, el grado del polinomio de aproximación y el lugar de los puntos base con respecto al intervalo de integración.
Los métodos de integración comúnmente utilizados se pueden clasificar en dos grandes grupos:
a) Las fórmulas de Newton-Cotes que emplean puntos equidistantes.
b) Las fórmulas de integración gaussiana que emplean puntos no equidistantes, determinados por al
gunas propiedades de los polinomios ortogonales, tema que se tratará en el capítulo 15.
Dentro de las fórmulas con puntos equidistantes, encontramos dos clases: cerradas y abiertas, en ambos
casos los límites de la integración son coincidentes con los puntos base o se pueden desplazar de ellos.
Las fórmulas cerradas emplean «formación de f(X) que tiene puntos base en ambos límites de la integración.
Las fórmulas abiertas no requieren información de f(X) en los límites de la integración.
A menudo es conveniente emplear las fórmulas de integración compuesta para reducir el error asociado
con el uso de fórmulas de integración de bajo orden; en este caso se subdivide el intervalo de Integración en
pequeños intervalos y se emplea la fórmula separadamente en cada subintervalo.
La aplicación repetida de fórmulas de bajo orden es preferible en general a la aplicación única de una fórmula
de alto orden, debido a la sencillez en la aplicación y a la sencillez en los cálculos.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas
Manejo de funciones discretas
Diferencias divididas
Polinomios factoriales
Sumas (sumatorias)
Sumas y series
La fórmula de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación .
Puntos no equiespaciados
Interpolación por segmentos (splines)
Interpolación
2
10
11
13
14
21
22
23
24
.
3
4
5
17
6
7
8
9
12
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Casos especiales en la integración numérica
www.elsolucionario.org
13
14
15
16
190
MÉTODOS NUMÉRICOS
INTEGRACIÓN NUMÉRICA
La importancia de la integración numérica puede apreciarse al notar con qué frecuencia la formulación de problemas en el análisis aplicado incluye derivadas. Es por tanto natural esperar que la solución de tales problemas incluya integrales. Para la mayor parte de las derivadas no es posible la representación en términos de las funciones
elementales, por lo que la aproximación se vuelve necesaria.
APROXIMACIÓN POLINOMIAL
La aproximación polinomial sirve como base para una amplia variedad de fórmulas de integración, donde la idea
principal es que si p(x) es una aproximación a y(x), entonces
p(x)dx =
y(x)dx
y en general este planteamiento es muy exitoso. En el análisis numérico la integración es la operación "fácil" y la
diferenciación la "difícil", en tanto que lo inverso es más o menos cierto en el análisis elemental. Los ejemplos más
conocidos son los siguientes:
1.
La fórmula de integración progresiva de Newton de grado n entre x0 y xn (el intervalo completo de la
colocación) conduce a varias fórmulas útiles, que incluyen
p(x) dx =
(yo+y 1 )
p(x) dx =
(yo + 4y 1 +y 2 )
p(x)dx =
(yo + 3y1+ 3y2 + y3)
para n - 1, 2 y 3. El error de truncamiento de cualquier fórmula de tales características es
y(x)dx-
p(x) dx
y puede estimarse de diversas maneras. Por ejemplo, un argumento de la serie de Taylor muestra que este error es aproximadamente -h3y(2)(ξ)/12 cuando n = 1, y cercano a -h 5 y 4 ) (Ξ)/90 cuando n - 2.
2.
Las fórmulas compuestas se obtienen aplicando en forma repetida las sencillas fórmulas que acaban de
presentarse para cubrir intervalos más largos. Esto es como usar varios segmentos lineales conectados o
segmentos parabólicos, etc., y su uso es más simple que el de un solo polinomio de alto grado.
3.
La regla trapezoidal,
y(x) dx =
(yo + 2y1 +
...
+ 2yn-1+yn)
es una fórmula compuesta elemental, pero poco común. Utiliza, desde luego, segmentos de linea conectados como la aproximación a y(x). Su error de truncamiento es aproximadamente -(xn - X0)h2y(2)(Ξ)/1 2.
www.elsolucionario.org
INTEGRACIÓN NUMÉRICA
4.
191
La regla de Simpson,
también es una fórmula compuesta y surge al usar segmentos parabólicos conectados como la aproximación a y(x). Es una de las fórmulas que más se utilizan para la integración aproximada. El error de truncamiento es alrededor de -(xn - xo)h4y(4)(ξ)/180.
.
El método de Romberg se basa en el hecho de que el error de truncamiento de la regla trapezoidal es
casi proporcional a h2. Dividiendo h entre dos y volviendo a aplicar la regla en esa forma, se reduce el
error por un factor de 1/4 . La comparación de los dos resultados lleva a una estimación de error restante.
Esta estimación puede utilizarse entonces como una corrección. El método de Romberg es un refinamiento sistemático de esta sencilla idea.
6. Es posible obtener fórmulas más complejas integrando polinomios de colocación sobre una parte menor
que el intervalo de colocación. Por ejemplo, la regla de Simpson con términos de corrección puede obtenerse integrando la fórmula de Stirling de sexto grado, que brinda la colocación en Xx-3 , . . . , x3, justo sobre
los dos intervalos centrales xn-1 a x1, y empleando después el resultado para desarrollar una fórmula compuesta. El resultado es
y(x)dx ≈ h / 3 ( y 0 + 4y1 + 2y2 + ...+yn) - h / 9 0 ( δ 4 y 1 + δ
4
y
3
+ )
+ h/756(δ6yl + δ6y3+ ...+ δ6yn-1)
la primera parte de la cual es la regla de Simpson.
7.
La fórmula de Gregory toma la forma de la regla trapezoidal con términos de corrección. Puede obtenerse a partir de la fórmula de Euler-Maclaurin expresando todas las derivadas como combinaciones apropiadas de diferencias para obtener
y también en este caso la primera parte es la regla trapezoidal. La propia fórmula de Euler-Maclaurin puede usarse como una fórmula de integración aproximada.
8.
El teorema de Taylor puede aplicarse para desarrollar el integrando como una serie de potencias, después de lo cual, la integración término por término conduce en ocasiones a una computación factible de la
integral. Se han desarrollado también formas más complejas relativas al uso de este teorema.
9.
El método de los coeficientes indeterminados puede utilizarse para generar fórmulas de integración de
una amplia variedad de tipos para propósitos especiales.
10.
La integración ajustada cubre los muchos métodos que se han ideado para afrontar el hecho de que la
mayor parte de las funciones son más difíciles de integrar con precisión sobre ciertos intervalos que sobre
otros. Una sección en particular difícil podría, por ejemplo, obligar al uso de un valor muy pequeño de h en
la regla de Simpson y conducir a demasiado cómputo innecesario. Los métodos ajustados utilizan subdivi-
www.elsolucionario.org
192
MÉTODOS NUMÉRICOS
siones más finas sólo donde ellos son realmente necesarios. Se ilustrará una forma sistemática para llevar a cabo lo anterior.
FUENTES DE ERROR
Se presentan las fuentes usuales de error. Sin embargo, los errores de entrada en los valores de los datos
y 0 , . . . . yn no son magnificados por la mayor parte de las fórmulas de integración, por lo que esta fuente de error
no es ni con mucho tan molesta como la diferenciación numérica. El error de truncamiento, que es,
[y(x)-p(x)]dx
para nuestras fórmulas más simples, y una composición de piezas similares para la mayor parte de las otras, es
ahora el principal contribuyente. Se han efectuado una amplia variedad de esfuerzos para estimar este error. Una
pregunta relacionada es la de la convergencia. Esta fórmula: cuando se usan continuamente polinomios de mayor
grado, o cuando se utilizan continuamente intervalos hn más pequeños entre los puntos dato como lím hn = 0, cuál
secuencia de aproximaciones se produce con el limite del error de truncamiento igual a cero. En muchos casos,
siendo excelentes ejemplos las reglas trapezoidal y de Simpson, puede probarse la convergencia. Los errores de
redondeo tienen también un fuerte efecto. Un intervalo pequeño h equivale a una computación sustancial y a mucho redondeo.
Estos errores de algoritmo a final de cuentas oscurecen la convergencia que teóricamente debe ocurrir; y se
encuentra en la práctica que al reducir h debajo de cierto nivel se producen errores más grandes en vez de más
pequeños. Cuando el error de truncamiento se vuelve despreciable, los errores de redondeo se acumulan, limitando la precisión que se obtiene con un método determinado.
Problemas resueltos
14.1
Integre la fórmula de Newton para un polinomio de colocación de grado n. Utilice los límites x0 y xn, que corresponden con los limites exteriores de la colocación. Suponga argumentos con igual espaciamiento.
El problema requiere la integración de una función lineal de x0 a X1, o una forma cuadrática de x0 a x2,
y asi sucesivamente. Véase la figura 14-1.
Fig. 14-1
www.elsolucionario.org
INTEGRACIÓN NUMÉRICA
193
La función lineal conduce realmente a 1/2h(y0 + y1)- Para la cuadrática
y un sencillo cálculo da como resultado, puesto que x = x0 + kh.
Para el polinomio cúbico un cálculo similar produce
También pueden obtenerse en la misma forma resultados para polinomios de mayor grado
p(x) dx = Ch(c0 y0 + ... + cnyn)
y los valores C y c1, para algunos de los primeros valores de n se presentan en la tabla 14.1. Tales fórmulas
reciben el nombre de fórmulas de Cotes.
Tabla 14.1
n
C
C0 C1
1
2
3
4
6
8
1/2
1/3
3/8
2/45
1/140
4/14,175
1
1
1
7
41
989
C2
1
4
3
32
216
5888
C3
1
3
12
27
-928
C4
C5
1
32
7
272
27
216
10,496 -4540 10,4%
C6
C7
41
-928 5888
C8
989
Es raro que se utilicen fórmulas de mayor grado, en parte porque se dispone de fórmulas más simples e
igualmente precisas, y debido también al hecho un poco sorprendente de que los polinomios de mayor grado no siempre equivalen a un mejoramiento de la precisión.
14.2
Estime el error de truncamiento de la fórmula n =1.
En este simple caso podemos integrar la fórmula
www.elsolucionario.org
194
MÉTODOS NUMÉRICOS
directamente y aplicar el teorema del valor medio del modo siguiente, obteniendo el error exacto:
donde h = x1 - x0. La aplicación del teorema del valor medio es posible debido a que (x - x0) (x - x1) no cambia de signo en (x0, x1). La continuidad de y2 (ξ) también está comprendida. Para n > 1 un cambio de signo
evita una aplicación similar del teorema del valor medio y muchos métodos se han ideado para estimar el
error de truncamiento, la mayoría de ellos presentan algunas desventajas. Vamos a ilustrar ahora uno de
los más antiguos, usando la serie de Taylor, para el sencillo caso de n = 1. Primero tenemos
Usando una integral indefinida F(x), donde F(x) - y(x), podemos también encontrar
y restando
que presenta el error de truncamiento en forma de serie. El primer término puede usarse como una estimación del error. Éste debe compararse con el error real cuando está dado por-(h 3 /12)y (2) (£) donde x0 <
14.3
Estime el error de truncamiento de la fórmula n - 2.
Procediendo como en el problema anterior, primero encontramos
La propia integral es
y sustrayendo
www.elsolucionario.org
INTEGRACIÓN NUMÉRICA
195
tenemos otra vez el error en forma de serie. El primer término se utilizará como una aproximación. Puede
además demostrarse que el error está dado por -(h5l90)y4)(ξ) dónde x0 < ξ < x2. (Véase el problema 14.65.)
Se aplica un procedimiento similar a las otras fórmulas. Los resultados se presentan en la tabla 14.2,
mostrándose sólo el primer término.
n
1
2
3
Error de
truncamiento
n
Error de
truncamiento
(h3/12)y(2)
4
6
8
-(8h 7 /945) ( 6 )
-(9h 9 /1400)y (8)
-(2368h 11 /467 775)y (10)
-
5
(4)
-(h /90)y
-(3h 5 /80)y (4)
Nótese que las fórmulas para n impar son comparables con aquellas para el siguiente entero más pequeño. (Por supuesto, tales fórmulas cubren un intervalo más de longitud h, pero esto no parece ser importante. Las fórmulas pares son superiores.)
14.4
Obtenga la regla trapezoidal.
Esta antigua fórmula continúa encontrando aplicación e ilustra de manera muy simple cómo las
fórmulas del problema 14.1 pueden extenderse para cubrir muchos intervalos. La regla trapezoidal se aplica
a nuestra fórmula n =1 para intervalos sucesivos hasta xn.
Esto lleva a la fórmula
que es la regla trapezoidal.
14.5
Aplique la regla trapezoidal a la integración de √x entre los argumentos 1.00 y 1.30. Use los datos de la
tabla 13.1, compare con el valor correcto de la integral.
Encontramos fácilmente
El valor correcto es 2/3[(1.3)3/2 -1 ] - .32149 hasta cinco lugares, haciendo el error real igual a .00002.
14.6
Obtenga una estimación del error de truncamiento de la regla trapezoidal.
El resultado del problema 14.2 puede aplicarse en cada intervalo, produciendo un error de truncamiento total de aproximadamente
www.elsolucionario.org
196
MÉTODOS NUMÉRICOS
Suponiendo la segunda derivada acotada, m < y(2) < M, la suma entre paréntesis estará entre nm y nM.
Además, la suposición de que esta derivada es continua permite que la suma se escriba como ny(2)(ξ)donde x0 < ξ < x2. Esto se debe a que y (2) (ξ) asume entonces todos los valores intermedios para m y M. Conviene denominar a los extremos del intervalo de integración como x0 = a y xn = b, haciendo b-a = nh. Con
todo esto, tenemos
Error de truncamiento ≈
14.7 Aplique la estimación del problema 14.6 a nuestra integral de la raíz cuadrada.
Con h = .05, b - a = .30 y y(2)(x) = -x -3/2/4, el error de truncamiento ≈ .000016 que es ligeramente menor que el error real de .00002. Sin embargo, redondeando hasta cinco lugares y sumando esta estimación
del error a nuestro resultado calculado, obtenemos .32149, que es el resultado correcto.
14.8
Estime el efecto de las inexactitudes en los valores y* sobre los resultados obtenidos mediante la regla
trapezoidal.
Con yk denotando los valores verdaderos, como antes, encontramos 1/2h (e0 + 2e1 + ... + 2en-1 + en) como el error debido a las inexactitudes ek - yk - yk. Si los ek no exceden la magnitud de £, este error de salida está acotado por 1/2h[E +2(n - 1 ) E + E] = (b - a)E.
14.9
Aplique lo anterior a la integral de la raíz cuadrada del problema 14.5.
Tenemos que (b - a)E = (.30)(.000005) = .0000015, por lo que esta fuente de error es despreciable.
14.10 Obtenga la regla de Simpson.
Ésta puede ser la más popular de todas las fórmulas de integración. Implica el uso de nuestra fórmula
n = 2 a pares sucesivos de intervalos hasta xm de donde se obtiene la suma
h/3 (y2 + 4y1 + y2 + h/3 (y2 + 4y3 + y4) + ... +h/ 3 (yn-2 + 4yn-1 + yn)
que se simplifica en
h/3 (y0+ 4y1 + 2y2 + 4y3 + ... + 2yn_2 + 4yn-1 + yn)
Ésta es la regla de Simpson y requiere que n sea un entero par.
14.11 Aplique la regla de Simpson a la integral del problema 14.5
[1.0000 + 4(1.02470 + 1.07238 + 1.11803) + 2(1.04881 + 1.09544) + 1.14017] = .32149
la cual es correcta hasta en cinco lugares.
www.elsolucionario.org
INTEGRACIÓN NUMÉRICA
197
14.12 Estime el error de truncamiento de la regla de Simpson.
El resultado del problema 14.3 puede aplicarse a cada par de intervalos, produciendo un error de truncamiento total de alrededor de
-h5/90 (y0(4) + y2(4)+ ... + y(4)n-2)
La suposición de que la cuarta derivada es continua permite escribir la suma entre paréntesis como
(n/2)y4(ξ) donde x0 < ξ < xn. (Los detalles son casi los mismos que los del problema 14.6.) Puesto que b a-nh,
Error de truncamiento =
14.13 Aplique la estimación del problema 14.12 a nuestra integral de la raíz cuadrada.
Como y (4) (x) = - 15/16 x - 7/2, el error de truncamiento ≈ . 00000001, que es insignificante.
14.14 Estime el efecto de las inexactitudes de los datos sobre los resultados calculados mediante la regla de
Simpson.
Como en el problema 14.8, se determina que este error es
y si las inexactitudes de tos datos ek no exceden a E en magnitud, este error de salida está acotado por
exactamente como en el caso de la regla trapezoidal. Aplique esto a la integral de la raíz cuadrada del problema 14.11 obtenemos el mismo valor de .0000015 como en el problema 14.9, por lo que nuevamente esta fuente de error es despreciable.
14.15 Compare los resultados de la aplicación de la regla de Simpson a los intervalos 2h y h y obtenga una nueva
estimación del error de truncamiento.
Suponiendo los errores de datos despreciables, comparamos los dos errores de truncamiento. Dejemos que E1 y E2 denoten estos errores para los intervalos 2h y h, respectivamente. Por tanto,
por lo que E2 ≈ E1 /16. El error se reduce por un factor de 16 al partir en dos el intervalo h. Lo anterior puede
ahora emplearse para obtener otra estimación del error de truncamiento de la regla de Simpson. Llámese l
al valor correcto de la integral; y A1 y A2 a las dos aproximaciones de Simpson. Por consiguiente
I = A1 + E1 = A2 + E2 ≈ A1 + 16E2
www.elsolucionario.org
198
MÉTODOS NUMÉRICOS
Resolviendo para E2, el error de truncamiento asociado con el intervalo h es E2 ≈ (A2 - A1) /15.
14.16 Utilice la estimación del problema 14.15 para corregir la aproximación de la regla de Simpson.
Ésta es una idea elemental pero útil. Encontramos
14.17 Aplique la fórmula trapezoidal de Simpson y n = 6 para calcular la integral de sen x entre 0 y π/2 a partir de
los siete valores que se proporcionan en la tabla 14.3. Compare con el valor correcto de 1.
Tabla 14.3
X
0
senx
.00000
π/12
.25882
2Π/12
.50000
3
Π/12
.70711
4Π/12
.86603
5Π/12
.96593
π/2
1.00000
La regla trapezoidal produce .99429. La regla de Simpson da como resultado 1.00003. La fórmula
n = 6 lleva a
Es claro que la regla n = 6 funciona mejor para estos datos fijos proporcionados.
14.18 Muestre que para la obtención de la integral del problema previo, correcta hasta en cinco lugares con la
regla trapezoidal, se requiere un intervalo h de aproximadamente .006 radianes. En contraste, la tabla 14.3
tiene h = π/12 ≈ .26.
El error de truncamiento del problema 14.6 sugiere que queremos
lo cual ocurrirá siempre que h < .006.
14.19 ¿Qué valor de h se requeriría para obtener la integral del problema 14.17 correcta hasta en cinco lugares,
utilizando la regla de Simpson?
El error de truncamiento del problema 14.12 sugiere
o h < .15 aproximadamente.
14.20 Pruebe que las reglas trapezoidal y de Simpson son convergentes.
www.elsolucionario.org
INTEGRACIÓN NUMÉRICA
199
Si suponemos que la única fuente de error es el truncamiento, entonces en el caso de la regla trapezoidal
donde / es la integral exacta y A la aproximación. (Aquí dependemos de la representación exacta del error
de truncamiento mencionada al final del problema 14.2.) Si el lim h = 0 y suponiendo entonces a y(2) acotada, lím (l - A) = 0. (Ésta es la definición de convergencia.)
Para la regla de Simpson tenemos un resultado similar
Si el lím h = 0 y suponiendo entonces a y ( 4 ) acotada, lím (l - A) = 0. El uso múltiple de fórmulas de mayor
grado conduce también a la convergencia.
dividiendo a la mitad continuamente el intervalo h
14.21 Aplique la regla de Simpson a la integral
para buscar una mayor precisión.
Las computaciones de máquina, llevando ocho dígitos, dan los resultados de la tabla 14.4.
Tabla 14.4
h
Integral aprox.
h
Integral a r o x .
π/8
π/16
1.0001344
1.0000081
1.0000003
.99999983 (máximas)
π/128
π/256
π/512
π/1024
.99999970
.99999955
.99999912
.99999870
π/32
π/64
14.22 Las computaciones del problema 14.21 indican una fuente de error que permanece y que no desaparece
cuando h disminuye, aumentando, de hecho, a medida que el trabajo continúa. ¿Cuál es esta fuente de
error?
Para intervalos h muy pequeños el error de truncamiento es muy pequeño y, como vimos antes, las
inexactitudes de los datos tienen poco impacto en la regla de Simpson en cualquier intervalo h. Pero una h
pequeña equivale a una gran cantidad, con la perspectiva de numerosos redondeos computacionales. Esta
fuente de error no ha sido un factor importante en los muchos algoritmos, más breves, que se encontraron
en la interpolación y en la diferenciación aproximada. Aquí se ha vuelto dominante y limita la precisión obtenible, aun cuando nuestro algoritmo es convergente (problema 14.20) y pequeño el efecto de las inexactitudes de los datos (estamos salvando ocho lugares decimales). Este problema resalta la importancia de continuar la búsqueda de algoritmos más breves.
14.23 Desarrolle la idea de los problemas 14.15 y 14.16 en el método de Romberg de la integración aproximada.
www.elsolucionario.org
200
MÉTODOS NUMÉRICOS
Supóngase que el error de una fórmula de aproximación es proporcional a hn. Entonces dos aplicaciones de la fórmula, con intervalos h y 2h, implican errores
E1 ≈ C(2h)2
E1
≈
Chn
haciendo E2 ≈ E/22. Con / = A1 + E1 = A2 + E2 como antes, encontramos rápidamente la nueva aproximación
Para n = 4 esto reproduce el problema 14.16. Para n = 2 se aplica a la regla trapezoidal en la cual el error
de truncamiento es proporcional a h2. No es difícil verificar que para n = 2 nuestra última fórmula reproduce
la regla de Simpson, y que para n = 4 reproduce la fórmula de Cotes n = 4. Puede demostrarse que el error
en esta fórmula es proporcional a hn+2 y esto sugiere una computación recursiva. Aplique la regla trapezoidal
varias veces, dividiendo continuamente h. Llame los resultados A1, A2, A3.... Aplique nuestra fórmula anterior con n = 2 a cada par de Ai consecutiva. Llame los resultados B1, B2, B 3 . . . . P u e s t o que el error es
ahora proporcional a h4 podemos volver a aplicar la fórmula, con n = 4, hasta la Bj.... Los resultados pueden
denominarse C1, C2, C3 .... Continuando en esta forma se obtiene un arreglo de resultados
A1
A2
B1 B2
A3
A4 . . .
B3 . . .
C1 C2 . . .
D1 . . .
El cálculo continúa hasta que las entradas en la parte inferior derecha del arreglo concuerdan con la tolerancia requerida.
14.24 Aplique el método de Romberg a la integral del problema 14.21.
Los diferentes resultados son como sigue:
Puntos utilizados
4
8
16
32
Resultado de la
regla trapezoidal
.987116
.996785
1.000008
.999196
1.000000
1.000000
.999799
1.000000
1.000000
1.000000
La convergencia hacia el valor correcto de 1 es manifiesta.
14.25 Es posible obtener fórmulas de integración más precisas integrando un polinomio sobre una parte menor
que el intervalo completo de colocación. Integre la fórmula de Stirling sobre los dos intervalos centrales.
Hasta la sexta diferencia la fórmula de Stirling es
www.elsolucionario.org
INTEGRACIÓN NUMÉRICA
201
La integración produce, puesto que x - x0 =kh y dx = h dk,
Es claro que se dispone de más términos al incrementar el grado del polinomio. Interrumpiendo el
proceso en el termino de la segunda diferencia llegamos otra vez a la combinación inicial de la regla de
Simpson, en la forma (h/3)(y-1 + 4y0 + y1). En este caso la integración se ha extendido sobre el intervalo
completo de la colocación como en el problema 14.1. Con el término de la cuarta diferencia integramos sobre sólo la mitad del intervalo de colocación (Fig. 14-2).
Fig. 14-2
Cuando se utilizan más diferencias y(x) y p(x) se colocan en argumentos adicionales, pero la integración se extiende sólo los dos intervalos centrales. Puesto que éstos son los intervalos donde la fórmula de
Stirling tiene el error de truncamiento más pequeño (problema 12.64), puede esperarse que una fórmula de integración obtenida de esta manera será más precisa. Sin embargo, esta precisión extra tiene cierto
precio; en las aplicaciones tales fórmulas requieren valore yk, fuera del intervalo de integración.
El error de truncamiento de esta fórmula puede ser estimado por el método de la serie de Taylor usado en el problema 14.6, y se obtiene aproximadamente
14.26 Emplee el resultado del problema 14.25 para desarrollar la regla de Simpson con términos de corrección.
Efectuamos n/2 aplicaciones centradas en x1, x3
x n-1 , donde n es par. El resultado es
Esto puede extenderse, si se desea, a diferencias de mayor orden.
El error de truncamiento del resultado será aproximadamente n/2 veces el del problema anterior y
puede escribirse como
www.elsolucionario.org
202
MÉTODOS NUMÉRICOS
14.27 Desarrolle la idea de la integración ajustada.
La idea esencial es subdividir cada parte del intervalo de integración tan finamente como sea posible
para que sólo contribuya con su proporción al error total. Hay muchas maneras de hacer esto. Supóngase
que el error total permisible es E. Elíjase una fórmula de integración y aplíquese al intervalo. Aplique un estimador de error. Si el error es menor que E, hemos terminado. Si no, aplique la fórmula a la mitad izquierda
del intervalo. Si la nueva estimación del error es menor que E/2, hemos terminado con ese medio intervalo.
Si no, este intervalo se parte a la mitad y se continúa el proceso. Al final se llega a un intervalo de longitud
(b - a)/2k siendo (a, b) el intervalo original, donde la fórmula en uso produce un resultado aceptable, con el
error menor que E/2k. El proceso se reanuda entonces, empezando en el margen derecho del intervalo
aceptado.
Como fórmula de integración básica, la regla de Simpson
h
A2 = — (y0 + 4y1 + 2y2 + 4y3 + y4)
3
podría elegirse. Como medida del error, la regla del intervalo doble
2h
A2 = — (yo + 4y2 + y4)
3
es en ese caso conveniente, puesto que en el problema el error se estimó como (A2 - A1)/15. La aproximación A2 se acepta entonces siempre que A2 - A1 ≤ 15E/2k y se acumula en la suma de otros resultados
aceptados a su izquierda. Es claro que el proceso finaliza cuando los fragmentos aceptados cubren (a, b).
14.28 Aplique el método de la integración ajustada del problema anterior a la integral:
Se efectuaron unas cuantas corridas con tolerancias diferentes y cambios ligeros en el límite superior.
La siguiente salida abreviada es común. Note en especial los valores de k, que empiezan en 1 (no impreso)
y ascienden a 7. Un intento por incrementar el limite superior un poco más encuentra que k aumenta rápidamente.
X
x6/6
Computado
2
4
6
8
10.667
682.667
7 776.000
43 690.67
10.667
682.667
7 775.99
43 690.58
14.29 Aplique la integración ajustada a la integral arco seno
www.elsolucionario.org
k
4
5
6
7
INTEGRACIÓN NUMÉRICA
203
Inquieta la discontinuidad infinita en el limite superior, lo que sugiere una disminución en el tamaño
del paso cerca de este extremo, al igual que en el problema precedente. Los valores de k ascienden de manera estable cuando el cómputo avanza y llegan a 15 con este resultado:
Límite superior - .9999
Integral - 1.5573
En este punto el valor correcto del arco seno es 1.5575.
14.30 Obtenga la fórmula de Gregory.
Ésta es una forma de la regla trapezoidal con términos de corrección y puede obtenerse de varias
maneras. Una de ellas empieza con la fórmula de Euler-Maclaurin (Problema 11.19) en la forma
Mas términos están disponibles si son necesarios. Ahora, exprese las derivadas en xn en términos de las diferencias atras
El resultado de sustituir estas expresiones es
y otra vez pueden computarse más términos si es necesario. Ésta es la fórmula de Gregory. No requiere de
valores y» fuera del intervalo de integración.
14.31 Aplique el teorema de Taylor para evaluar la integral de la función error
www.elsolucionario.org
204
MÉTODOS NUMÉRICOS
para x = .5 y x = 1, correcta hasta cuatro decimales.
Para x - .5 esto produce .5205 y para x = 1 encontramos .8427. El carácter de esta serie asegura que el
error que se hace al truncarla no excede al último término utilizado, por lo que podemos confiar en nuestros
resultados. El método de la serie ha funcionado muy bien aquí, pero se aclarará que si se quieren más lugares decimales o si se usarán límites superiores x más grandes, entonces se incluirán muchos más términos en esta serie. En tales casos suele ser más conveniente proceder como en el siguiente problema.
14.32 Tabule la integral de la función error para x - 0(.1)4 hasta seis lugares.
Adoptamos el método que se utilizó para preparar la tabla de quince lugares de esta función, NBSAMS 41. Las derivadas necesarias son
H'(x) = 2/√π e-x² H2(x) = y en general
2xH(x)
H(3)(x) = - 2xH(2)x) - 2H'(x)
H(n)(x) = - 2xH(n-1)(x) - 2(n - 2)H(n-2)(x)
La serie de Taylor puede ser escrita como
H(x + h) = H(x) + h H ' ( x ) + .....
donde el residuo es el usual R - h ( n + 1 ) H(n+1)(ξ)/(n+1)!. Note que si M denota la suma de los términos de
potencias pares y N los términos de potencias impares, entonces
H(x + h) = M + N H(x-h) = M - N
Para una precisión de seis lugares usamos términos de la serie de Taylor que afectan el lugar octavo, porque la magnitud de la tarea que hay que efectuar hace que sea posible el crecimiento sustancial del error
de redondeo. Con H(0) - 0, la computación empieza con
sólo contribuyen las potencias impares. A continuación ponemos x = .1 y encontramos
H (2) (.l)= -.2H'(.1)= -.22343032
www.elsolucionario.org
INTEGRACIÓN NUMÉRICA
H(3)(.1) =
(4)
205
-.2H(2)(.l)-2H'(.1)=
(3)
-2.1896171
(2)
H (.l) = -.2H (.l) - 4H (.l) = 1.3316447
H (5) (.l) = - .2H(4)(.1) - 6H(3)(.l) = 12.871374
H(6)(.l)= -.2H ( 5 ) (.l) - 8H (4) (.l)= -13.227432
llevando a
M = .11246291 - .00111715 + .00000555 - .00000002 =.11135129
N= .11171516 - .00036494 + .00000107 = .11135129
Puesto que H(x - h) = M - N, redescubrimos que H(0) = 0, lo cual comprueba la corrección del cálculo. Obtenemos también
H(.2) = H(x+h) = M + N = .22270258
Después de esto se repite el proceso para obtener una verificación en H(.1) y una predicción de H(.3).
Continuando en esta forma se llega a H(4). Los dos últimos lugares decimales pueden entonces redondearse. Los valores correctos hasta seis lugares se proporcionan en la tabla 14.15 para x = 0(.5)4. En las computaciones de la tabla NBS-AMS 41 se efectuaron hasta 25 lugares, que luego se redondearon hasta 15. Después se realizaron extensas subtabulaciones para argumentos x pequeños.
Tabla 14.5
X
H(x)
.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
.520500
.842701
.966105
.995322
.999593
.999978
.999999
1.000000
14.33 Ilustre el método de los coeficientes indeterminados para obtener fórmulas de integración aproximadas,
aplicándolo a la deducción de la regla de Simpson.
En este método apuntamos directamente a un fórmula de un tipo preseleccionado. Para la regla de
Simpson la elección
h(c-1 y-1, + c0y0 + c1y1)
es conveniente. La selección de los coeficientes ck puede proceder de muchas maneras, pero para la regla
de Simpson la elección se hace sobre la base de que la fórmula resultante es exacta cuando y(x) es cualquiera de las primeras tres potencias de x. Tomando y(x) = 1, x, y a su vez x2, llegamos a las condiciones
2 = c-1 + c0 + c1 0 = - c-1 + c1 2/3 = c-1 + c1
www.elsolucionario.org
206
MÉTODOS NUMÉRICOS
que produce c-1 = c1 - 1/3, c0 = 4/3 haciendo
(y -1 +4y 0 + y1)
Aplicando este resultado a pares sucesivos de intervalos entre x0 y xn se genera otra vez la regla de Simpson.
Como un beneficio, este resultado demuestra ser exacto para y(x) - x3, como puede observarse fácilmente a partir de las simetrías. Esto significa además que es también exacto para cualquier polinomio de
grado tres o menor. En polinomios de mayor grado hay un término de error.
14.34 Aplique el método de coeficientes indeterminados para obtener una fórmula del tipo
2
y(x) dx = h(a 0 y0 + a1 y1) + h (b 0 y'0 + b1 y'1 )
Con cuatro coeficientes disponibles, tratamos de hacer la fórmula exacta cuando y(x) = 1, x, x2 y x3.
Esto nos lleva a cuatro condiciones
q u e p r o d u c e a0 = a1
b0= -b1
=
La fórmula resultante es
que reproduce los primeros términos de la fórmula de Euler-Maclaurín. Puede generarse una gran variedad de fórmulas mediante este método de los coeficientes indeterminados. Como en los ejemplos que acaban de presentarse, un poco de planeación preliminar y el uso de la simetría pueden con frecuencia simplificar el sistema de ecuaciones que al final determina los coeficientes.
Problemas suplementarios
14.35 Integre la fórmula de Newton para un polinomio de colocación de cuarto grado y de ese modo verifique el
renglón n = 4 de la tabla 14.1.
14.36 Verifique el renglón n = 6 de la tabla 14.1.
14.37 Use el método de la serie de Taylor para obtener la estimación del error de truncamiento para la fórmula n = 3
como se lista en la tabla 14.2.
www.elsolucionario.org
207
INTEGRACIÓN NUMÉRICA
14.38 Use el método de la serie de Taylor para verificar la estimación del error de truncamiento para la fórmula
n = 4.
14.39 Aplique diversas fórmulas al siguiente suministro de datos limitados para aproximar la integral de y(x):
1.0
1.2
1.4
1.6
1.8
2.0
1.0000
.8333
.7143
.6250
.5556
.5000
X
y(x)
Utilice la regla trapezoidal, aplicando términos de corrección. ¿Qué tanta confiabilidad puede usted dar a su
resultado? ¿Sería correcto hasta cuatro lugares? (Véase el siguiente problema.)
14.40 Los datos del problema 14.39 pertenecen en realidad a la función y(x) - 1/x. Por tanto, la integral es correcta hasta en cuatro lugares, In 2 = .6931. ¿Se ha producido esto con algún método aproximado?
14.41 Use la estimación del error de truncamiento correspondiente a la regla trapezoidal para predecir qué tan
compactamente deben empaquetarse los valores de y(x) (qué intervalo h) para que la propia regla
trapezoidal logre un resultado correcto hasta en cuatro lugares en relación con∫2 dx/x.
14.42 Suponga que los datos del problema 14.39 se amplían mediante la inclusión de estos nuevos pares de
números:
X
1.1
1.3
1.5
1.7
1.9
y(x)
.9091
.7692
.6667
.5882
.5263
Vuelva a aplicar la regla trapezoidal al conjunto completo de datos proporcionados. Use este resultado como A2, y como A1, el resultado correspondiente del problema 14.39, y la fórmula del problema 14.23 para
obtener incluso otra aproximación a /. ¿Es ésta correcta hasta en cuatro lugares?
14.43 Aplique la regla trapezoidal con términos de corrección al conjunto de datos completo disponible para
14.44 Aplique la regla de Simpson a los datos del problema 14.39. ¿Serán necesarios los términos de corrección
como en el problema 14.26? Si es así, aplíquelos.
14.45 Use la estimación del error de truncamiento correspondiente a la regla de Simpson para predecir cuántos
valores de y(x), o qué tan pequeño un intervalo h, se necesitarán para que esta regla produzca In 2 correcto
hasta en cuatro lugares.
14.46 ¿Qué tan pequeño se requeriría un intervalo h para obtener el valor de In 2 correcto hasta en ocho lugares
utilizando la regla trapezoidal? ¿Empleando la regla de Simpson?
14.47 Aplique la fórmula de Euler-Maclaurin (problema 14.30) hasta en los términos de la quinta derivada para
evaluar In 2 hasta en ocho lugares decimales. El valor correcto es .69314718. (Trate con ti - .1.)
www.elsolucionario.org
208
MÉTODOS NUMÉRICOS
de la mejor manera que usted pueda hacerlo.
14.48 A partir de los siguientes datos estime
x
0
.25
.50
.75
1.00
1.25
1.50
1.75
2
y(x)
1.000
1.284
1.649
2.117
2.718
3.490
4.482
5.755
7.389
¿Qué tanta confiabilidad puede dar a sus resultados? ¿Considera que sean correctos hasta en tres tugares
decimales?
14.49 Los datos del problema 14.48 se tomaron de la función exponencial y(x) - e2. La integral correcta es, por
- 1 = 6.389. ¿Fue posible producir este resultado con alguna de
tanto, hasta en tres lugares,
nuestras fórmulas?
de la mejor manera que pueda hacerlo.
14.50 A partir de los siguientes datos, estime
X
1
1.5
y(x)
0
.41
2
.69
2.5
3
3.5
4
4.5
5
.92
1.10
1.25
1.39
1.50
1.61
¿Qué tanta confiabilidad puede dar a sus resultados?
14.51 Los datos del problema 14.50 corresponden a y(x) - log x. Por tanto, la integral correcta hasta en dos
lugares es
¿Fue posible predecir este resultado con alguna de nuestras
fórmulas?
14.52 Calcule
correcta hasta en siete lugares mediante la integración ajustada. El valor correcto es Π/4,
o hasta en siete lugares .7853892.
14.53 Calcule
hasta en cuatro lugares decimales. Ésta se llama una integral elíptica. Su valor
correcto es 1.4675. Use la integración ajustada.
14.54 Muestre que hasta en cuatro lugares
14.55 Utilice la integración ajustada para verificar
siendo π el valor exacto.
14.56 Aplique el método de la serie de Taylor como en el problema 14.31, para calcular la integral del seno
www.elsolucionario.org
INTEGRACIÓN NUMÉRICA
209
para x - 0(.1)1, hasta en cinco lugares decimales. El procedimiento refinado que se utilizó en el problema
14.32 no es necesario aquí. El último resultado debe ser Si(1) - .94608.
14.57 Aplique el método de la serie de Taylor como en el problema 14.32 para calcular la integral del seno para
x - 0(.5)15, hasta en cinco lugares decimales. Él resultado final debe ser Si(15) - 1.61819.
14.58 Aplique el método de la serie de Taylor para calcular
sen x dx hasta ocho lugares decimales.
14.59 Aplique el método de la serie de Taylor para calcular
hasta cuatro lugares decimales.
14.60 Calcule la longitud del arco total de la elipse x2 + y2/4 - 1 hasta seis lugares decimales.
14.61 Añadiendo (h/140)δ6y3 a la fórmula n - 6 de la tabla 14.1, obtenga la regla de Weddle,
14.62 Use el método de los coeficientes indeterminados para deducir una fórmula de la forma
que es exacta para polinomios del mayor grado posible.
14.63 Utilice el método de los coeficientes indeterminados para obtener la fórmula
probando que es exacta para polinomios hasta de tercer grado.
14.64 Use el método de los coeficientes indeterminados para obtener
probando que es exacta para polinomios hasta de quinto grado.
14.65 Obtenga la expresión exacta para el error de truncamiento de nuestra fórmula n = 2 mediante el siguiente
método. Sea
Diferencie tres veces con respecto a h, empleando el teorema de "diferenciación bajo el signo integral"
www.elsolucionario.org
210
MÉTODOS NUMÉRICOS
F(3)(h)
para obtener
= h/3[y 3 (h) -y(3)( - h)]
Note que F'(0) = F(2)(0) = F(3)(0) = 0. Suponiendo y(4)(x) continua, el teorema del valor medio produce en esas
condiciones
donde θ depende de h y ésta cae entre -1 y 1. Invertimos la dirección y recuperación F(h) por integración.
Resulta conveniente sustituir h por t (haciendo θ una función de t). Verifique que
diferenciando tres veces con respecto a h para recuperar la F(3) (h) anterior. Puesto que esta fórmula hace
también F(0) = F'(0) = F(2)(0), es la F(h) original. Aplique a continuación el teorema del valor medio
con a <ξ<b, que es válido para funciones continuas siempre que f(t) no cambie de signo entre a y b. Estas
condiciones se cumplen aquí con f(t) = -t2(h - t)2/3. El resultado es
Éste es el resultado que se mencionó en el problema 14.3. Las primeras etapas de esta prueba, en la que
maniobramos a partir de F(h) hasta su tercera derivada y regresamos otra vez, tiene como meta una representación de F(h) para la cual el teorema del valor medio puede aplicarse. Recuerde que f(t) no cambia de signo en el intervalo de integración. Ésta es con frecuencia la dificultad principal al obtener una fórmula de
error de truncamiento del tipo que se acaba de encontrar.
14.66 Modifique el argumento del problema 14.65 para obtener la fórmula dada al final del problema 14.2.
Error de truncamiento =
para la fórmula n = 1.
14.67 Evalúe
correcta hasta en seis lugares.
www.elsolucionario.org
Integración gaussiana
15
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el concepto de integración gaussiana (Introducción).
2. Explicar con sus propias palabras las fuentes de error involucradas en la integración gaussiana
(Introducción).
3. Calcular una estimación del error de truncamiento, empleando la integración gaussiana (Problemas
15.2,15.27,15.28,15.33,15.34).
4. Calcular una estimación de la precisión, empleando la integración gaussiana (Problemas 15.25,15.58).
5. Calcular numéricamente la integral definida de una función, calcularla también aplicando algún método
del capítulo 14 (Simpson, Taylor, etc.) comparándola con el resultado utilizando integración
gaussiana (Problemas 15.31,15.32,15.56,15.59,15.60,15.74 a 15.78):
6. Explicar con sus propias palabras el efecto de la longitud del intervalo en la integración gaussiana
(Problema 15.30).
7. Explicar con sus propias palabras el importante papel que juegan los polinomios ortogonales dentro de
la integración gaussiana (Problemas 15.3 a 15.7).
8. Explicar con sus propias palabras en qué consisten las fórmulas de integración de Gauss-Legendre
(Problemas 15.8 a 15.15).
9. Calcular numéricamente una aproximación de la integral de una función dada, utilizando el método de
Gauss-Legendre (Problemas 15.16 a 15.18,15.23,15.24,15.26,15.29,15.47,15.48 a 15.55,15.57,
15.63,15.64).
10. Derivar la identidad de Christoffel mediante la recursividad de los polinomios de Legendre (Problemas
15.19 a 15.21).
11. Explicar con sus propias palabras en qué consisten las fórmulas de integración de Gauss-Laguerre
(Problemas 15.35,15.61,15.66).
12. Calcular numéricamente una aproximación de la integral de una función dada, utilizando el método de
Gauss-Laguerre (Problemas 15.36 a 15.38,15.62,15.65,15.67 a 15.70).
13. Explicar con sus propias palabras en qué consisten las fórmulas de integración de Gauss-Hermite
(Problemas 15.1,15.2).
14. Calcular numéricamente una aproximación de la integral de una función dada, utilizando el método de
Gauss-Hermite (Problemas 15.39 a 15.42,15.71 a 15.73).
15. Explicar con sus propias palabras en qué consisten las fórmulas de integración de Gauss-Chebyshev
(Problemas 15.43,15.44).
www.elsolucionario.org
212
MÉTODOS NUMÉRICOS
16. Calcular numéricamente una aproximación de la integral de una función dada, utilizando el método de
Gauss-Chebyshev (Problemas 15.45,15.79).
17. Explicar con sus propias palabras las ventajas de la integración gaussiana, con respecto a las fórmulas
de integración vistas en el capitulo 14 (Aplicaciones e Introducción).
18. Explicar con sus propias palabras las desventajas de la integración gaussiana, con respecto a las
fórmulas de integración vistas en el capítulo 14 (Aplicaciones e Introducción).
APLICACIONES DE LA INTEGRACIÓN NUMÉRICA
Las fórmulas de integración gaussiana son difíciles de aplicar en cálculos manuales, primordialmente debido
a que las abscisas usualmente son irracionales. Sin embargo para las computadoras, estas abscisas y sus pesos
(ponderaciones) correspondientes se pueden precalcular y almacenar en memoria principal o en archivos, para
emplearse posteriormente a la hora de los cálculos. En términos generales la integración gaussiana nos proporciona mayor precisión que las fórmulas de Newton vistas en el capítulo 14.
Otra ventaja muy importante con respecto a los métodos del capitulo 14, es que la integración gaussiana no
se ve afectada por la inestabilidad que caracteriza en algunos casos a las fórmulas de Newton.
En el capítulo 14 derivamos fórmulas de integración en las cuales dos de los puntos fundamentales Xo y Xn
se acomodaban de tal manera que coincidieran con los límites de la integral a y b. Si esta restricción no existiera y
tuviéramos la libertad de asignar otros lugares estratégicos para estos puntos base, podríamos esperar desarrollar
fórmulas que nos proporcionaran mayor precisión para un número de puntos dado; esta libertad en la restricción
nos da la pauta para emplear la integración gaussiana que nos proporcionará mayor precisión. Mediante una
apropiada transformación de la variable de integración o de la función que se va a integrar, las cuatro fórmulas de
(cuadratura) integración gaussiana que se van a desarrollar en este capítulo (Gauss-Legendre, Gauss-Laguerre, Gauss-Hermite y Gauss-Chebyshev), permiten la evaluación de integrales de buen comportamiento sobre
intervalos de integración finitos, semi-infinitos o infinitos. En algunos casos será posible evaluar integrales en las
cuales el integrando tiene alguna singularidad (impropiedad) dentro del intervalo de integración, relegando el término impropio (singular) a la función de ponderación; este tema en particular se cubrirá en el capítulo 16.
Existe una gran variedad de fórmulas de cuadratura del tipo gaussiano, que pueden generarse para
funciones de ponderación particulares, para límites de integración y para conjuntos de polinomios ortogonales.
Las fórmulas gaussianas pueden emplearse repetidamente sobre subintervalos del intervalo de integración; no existe en términos generales el concepto de ahorrar en el número de evaluaciones funcionales por subintervalo, como ocurre cuando se construyen fórmulas compuestas provenientes de los métodos cerrados de
Newton-Cotes de bajo orden, vistos en el capítulo 14.
Desde otro punto de vista, una desventaja de la integración gaussiana es que el uso de factores de ponderación y de puntos base, requiere fórmulas de orden alto que son virtualmente imposibles de calcularse manualmente; asimismo en algunos casos puede ser tediosa la preparación de programas computacionales para obtener
una cuadratura de muchos puntos, debido a la gran cantidad de datos de ponderación que se tienen que generar y
posteriormente almacenar.
Aunque las proposiciones siguientes no se pueden considerar estrictamente matemáticas, en la práctica se
cumplen a menudo:
a)
El método más sencillo es el del trapezoide, por su fácil representación y comprensión geométrica, sin
embargo tiene serias limitantes con respecto a precisión.
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
213
b)
El método de Simpson requiere de la mitad de puntos que el del trapezoide para generar la misma precisión.
c)
Consecuentemente si deseamos mayor precisión en el método del trapezoide, deberemos incrementar
el número de puntos, a sabiendas de que podemos incrementar el error de redondeo (Capítulo 1).
d)
En muchas ocasiones los métodos de integración gaussiana requieren la mitad de puntos que el método de Simpson.
e)
Consecuentemente los métodos de integración gaussiana requerirán la mitad del trabajo que el método
de Simpson.
f)
Es muy importante recordar que los métodos de trapezoide y Simpson requieren puntos equidistantes.
g)
La integración gaussiana por el contrario, no requiere puntos equidistantes.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas
Manejo de funciones discretas
Diferencias divididas
Polinomios factoriales
Sumas (sumatorias)
Sumas y series
La fórmula de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equiespaciados
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Casos especiales en la integración numérica
www.elsolucionario.org
2
10
11
13
14
21
22
23
24
3
4
5
17
6
7
8
9
12
13
14
15
16
214
MÉTODOS NUMÉRICOS
CARÁCTER DE UNA FÓRMULA GAUSSIANA
La idea principal detrás de la integración gaussiana es que en la selección de una fórmula
puede no ser prudente especificar que los argumentos xi están igualmente espaciados. Todas las fórmulas del capítulo anterior suponen igual espaciamiento, y si los valores y(x,) se obtienen en forma experimental esto probablemente será cierto. Sin embargo, muchas integrales implican funciones analíticas que pueden computarse para
cualquier argumento y con gran precisión. En tales casos, es útil preguntar qué elección de las xi y las A, en conjunto llevará a la máxima precisión. Se ha demostrado que es conveniente analizar la fórmula un poco más general
en la cual w(x) es una función de peso que se especificará después. Cuando w(x) = 1 tenemos la fórmula original
más simple.
Un planteamiento para tales fórmulas gaussianas es requerir la precisión perfecta cuando y(x) es una de las
funciones potencias 1, x, x2
x 2 n - 1 . Esto brinda 2n condiciones para determinar los 2n números xi y Ai. En
efecto,
donde Li(x) es la función del multiplicador de Lagrange presentada en el capítulo 8. Los argumentos x 1 , . . . , xn son
los ceros del polinomio pn(x) de grado n-ésimo perteneciente a una familia que tiene la propiedad de ortogonalidad
Estos polinomios dependen de w(x). La función de peso afecta por consiguiente tanto a Ai como a xi pero no aparece en forma explícita en la fórmula gaussiana.
La fórmula de Hermite para un polinomio de osculación proporciona otro planteamiento para las fórmulas
gaussianas. La integración del polinomio de osculación produce
pero la elección de los argumentos x, como los ceros de un miembro de una familia ortogonal hace todas las Bi = 0.
0. La fórmula se reduce entonces a la del tipo prescrito. Esto indica, y procederemos a comprobarlo, que un polinomio de colocación simple en estos argumentos igualmente espaciados conduciría al mismo resultado.
Por tanto, los polinomios ortogonales desempeñan un papel central en la integración gaussiana. Un estudio
de sus principales propiedades constituye una parte sustancial de este capítulo.
El error de truncamiento de la fórmula gaussiana es
b
www.elsolucionario.org
INTEGRACIÓN NUMÉRICA
215
donde π(x) - (x - X1) ... (x - x n ). Puesto que esto es proporcional a la derivada 2n de y(x), tales fórmulas son exactas para todos los polinomios de grado 2n - 1 o menor. En las fórmulas del capítulo anterior es y(n)(ξ) lo que aparece en este lugar. En cierto sentido nuestras fórmulas presentes son dos más veces más precisas que las basadas
en argumentos igualmente espaciados.
TIPOS PARTICULARES DE FORMULAS GAUSSIANAS
Pueden obtenerse tipos particulares de fórmulas gaussianas eligiendo w(x) y los límites de integración de diferentes maneras. Algunas veces se desea también imponer restricciones, tales como especificar cierta xi al principio. Se presentan varios tipos particulares.
1. La fórmula gaussiana de Legendre ocurre cuando w(x) = 1. Ésta es el prototipo del método gaussiano y
lo analizaremos con mayor detalle que los otros tipos. Es costumbre normalizar el intervalo (a, b) en
(-1,1). Los polinomios ortogonales son entonces los polinomios de Legendre
con P0(x) = 1. Las xi son los ceros de estos polinomios y los coeficientes son
Se disponen las tablas xi y Ai para sustituirlas directamente en la fórmula de Gauss-Legendre
Se requieren varias propiedades de los polinomios de Legendre en el desarrollo de estos resultados, que incluyen las siguientes:
PB(x) tiene n ceros reales en (-1,1)
(n + 1)Pn+1(x) = (2n + l)xPn(x) - nPn-1(x)
www.elsolucionario.org
216
MÉTODOS NUMÉRICOS
La estimación de Lanczos del error de truncamiento de las fórmulas de Gauss-Legendre toma entonces la forma
donde / es la integral aproximada obtenida mediante la fórmula gaussiana del punto n. Nótese que el término Σ implica la aplicación de esta misma fórmula a la función xy'(x). Esta estimación del error parece
ser bastante precisa con respecto a funciones continuas.
2.
Las fórmulas de Gauss-Laguerre toman la forma
siendo las xi los ceros del polinomio n-ésimo de Laguerre
y siendo los coeficientes Ai
Los números xi y Ai se disponen en tablas.
La deducción de las fórmulas de Gauss-Laguerre es muy similar a la de Gauss-Legendre, al emplear propiedades de los polinomios de Laguerre.
3.
Las fórmulas de Gauss-Hermite toman la forma
siendo los argumentos xi los ceros del polinomio n-ésimo de Hermite
y siendo los coeficientes Ai
Los números x, y A¡ se encuentran disponibles en tablas.
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
4.
217
Las fórmulas de Gauss-Chebyshev toman la forma
siendo los argumentos xi los ceros del polinomio n-ésimo de Chebyshev Tn(x) = cos (n arccos x).
Problemas resueltos
EL MÉTODO GAUSSIANO
15.1
Integre la fórmula de Hermite para una aproximación de polinomio de osculación a y(x) en los argumentos
xi a xn.
Aquí es conveniente eliminar el argumento x0 en nuestro polinomio de osculación. Esto requiere sólo
cambios menores en nuestras fórmulas del capítulo 10. La fórmula de Hermite por sí misma se convierte en
donde Li(x) - Fi(x)IFi(xi) es la función multiplicadora de Lagrange, siendo Fi(x) el producto Fi (x) = (x
(x -- xxkk).
Integrando, encontramos
www.elsolucionario.org
218
MÉTODOS NUMÉRICOS
Puesto que w(x) se elegirá como una función no negativa y [π(x)]2 es seguramente positiva, el teorema del
valor medio produce de inmediato
para el error de truncamiento. Aquí a < θ < b, pero como es usual θ no se conoce en otras circunstancias.
Note que si y(x) fuera un polinomio de grado 2n - 1 o menor, este término del error sería exactamente 0.
Nuestra fórmula será exacta para todos los polinomios de tales características.
15.3
Demuestre que los coeficientes Bi serán 0 si
Por el problema 8.3 (x -xi)Li(x) - n(x)/π'(xi). Sustituyendo esto en la fórmula para Bi,
Pero Li(x) es un polinomio de grado n - 1 y así
15.4
Defina las funciones ortogonales y vuelva a enunciar el resultado del problema 15.3 en términos de la ortogonalidad.
Las funciones f1(x) y f2(x) reciben el nombre de ortogonales en el intervalo (a, b) con la función de peso w(x) si
Los coeficientes B i , de nuestra fórmula serán cero si (x) es ortogonal a x p para p = 0 , 1 , . . . , n - 1.
Además π(x) será entonces ortogonal a cualquier polinomio de grado n-1 o menor, incluyendo las funciones multiplicador de Lagrange Li(x). Tal ortogonalidad depende y determina nuestra elección de los argumentos de colocación x k y se supone para el resto del capítulo.
15.5
Pruebe que con todas las Bi = 0, los coeficientes Ai se reducen a
siguiente, números positivos.
y son, por con-
que se reduce a la forma requerida cuando Bi = 0
15.6
Obtenga la fórmula más simple Ai
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
219
Se obtiene el resultado si podemos mostrar que
Pero Li(x) - 1 debe contener (x -xi) como un factor, debido a que Li(xi) -1 = 1 - 1 = 0.
En consecuencia,
con p(x) de grado n -1 a lo sumo. El problema 15.3 garantiza, por tanto, que la integral es cero.
15.7
La fórmula de integración de esta sección puede ahora escribirse como
donde
y los argumentos x¡ tienen que elegirse mediante los requerimientos de octógona-
lidad del problema 15.3. Esta fórmula se obtuvo por integración de un polinomio de osculación de grado 2n - 1,
determinado por los valores yi y yi' en los argumentos xi. Demuestre que la misma fórmula se obtiene por
medio de la integración del polinomio más simple de colocación de grado n - 1, determinado únicamente
por los valores yi. (Ésta es una forma de considerar las fórmulas gaussianas; con ellas se logra una gran
exactitud a partir de polinomios de grado relativamente bajo.)
El polinomio de colocación especial es
por lo que la integración produce
como se indicó. Aquí p(x) representa el polinomio de colocación. En el problema 15.1 éste simbolizó al polinomio más complicado de osculación. Ambos conducen a la misma fórmula de integración. (Para un ejemplo específico de esto, véase el problema 15.25.)
FÓRMULAS DE GAUSS-LEGENDRE
15.8 El caso especial w(x) - 1 conduce a las fórmulas de Gauss-Legendre. Es común utilizar el intervalo de
integración ( - 1 , 1). Como un ejercicio preliminar, determine los argumentos xk directamente de las condiciones del problema 15.3
para el valor n = 3.
El polinomio π(x) es, en consecuencia, cúbico, digamos π(x) = a + bx + cx2 + x3. La integración produce
www.elsolucionario.org
220
MÉTODOS NUMÉRICOS
lo que rápidamente lleva a a = c = 0, b = -3/5. Esto hace
Los argumentos de colocación son por tanto xn = - √3/5, 0, √3/5.
Teóricamente este procedimiento produciría las xk para cualquier valor de n, pero es mas rápido usar
un planteamiento más sofisticado.
15.9
El polinomio de Legendre de grado n está definido por
con P0(x) = 1. Demuestre que para k = 0,1
,n-1
lo que también hace a Pn(x) ortogonal para cualquier polinomio de grado menor que n.
Aplique la integración por partes k veces.
15.10 Demuestre que
Tomando k = n en el problema anterior,
Esta última integral responde al tratamiento
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
221
por lo que
Multiplicando ahora arriba y abajo por 2n(2n - 2) ... 2 - 2nn! y recordando la definición de Pn(x) para obtener, como se requería,
15.11 Demuestre que
Separando la potencia más alta de x en un factor Pn(x),
Las potencias menores xn no contribuyen, por el problema 15.9. Empleando el problema anterior, tenemos
15.12 Demuestre que para m≠n,
P m (x)P n (x)dx = 0.
Escribiendo fuera el polinomio de menor grado, encontramos cada potencia en el ortogonal al polinomió de más alto grado. En particular con m = 0 y n ≠ 0 tenemos el caso especial
El polinomio (x2 - 1 ) n es de grado 2n y tiene ceros múltiples en ±1. Su derivada, por tanto, tiene un cero interior, por el teorema de Rolle. Esta primera derivada es también cero en ±1, lo que hace tres ceros en
total. Por tanto, existe la certeza de que la segunda derivada tiene dos ceros interiores por el teorema de
Rolle, y también es cero en ±1, lo que hace cuatro ceros en total. Continuando de la misma forma encontramos que seguramente corresponderán n ceros interiores a la derivada n-ésima, por el teorema de Rolle, y
exceptuando un factor constante, esta derivada es un polinomio de Legendre Pn(x).
15.14 Demuestre que para la función de peso w(x) - 1, n(x) Dejemos que los n ceros de Pn(x) correspondan a
X1
xn. En consecuencia
El único requerimiento adicional sobre π(x) es que sea ortogonal a x k para
sulta del problema 15.9.
k=0,1,...,n-1.
Pero esto re-
15.15 Calcule los primeros polinomios de Legendre directamente de la definición, notando que sólo las potencias
pares o las impares pueden ocurrir en cualquiera de tales polinomios.
www.elsolucionario.org
222
MÉTODOS NUMÉRICOS
P0(x) por definición es 1. Entonces encontramos
De manera similar,
y así sucesivamente. Puesto que (x2 - 1)n implica sólo potencias pares de x, el resultado de diferenciar n
veces contendrá sólo potencias pares o sólo impares.
15.16 Demuestre que xn puede expresarse como una combinación de polinomios de Legendre hasta Pn(x). Lo
mismo se cumple entonces para cualquier polinomio de grado n.
Resolviendo a su vez para potencias sucesivas, encontramos
etcétera. El hecho de que cada Pk(x) empieza con un término diferente de cero en xk permite que este procedimiento continúe en forma indefinida.
15.17 Demuestre la recurrencia de los polinomios de Legendre,
(n + 1)Pn+l(x) = (2n + 1)xPn(x) - nP n-1 (x)
El polinomio xPn (x) es de grado n + 1, y por ello puede expresarse como la combinación (véase el
problema 15.16)
Multiplique por Pk(x) e integre para encontrar
cancelándose todos los demás términos de la derecha puesto que los polinomios de Legendre de diferentes grados son ortogonales. Pero para k < n - 1 sabemos que Pn(x) también es ortogonal a xPk (x), puesto
que en esas condiciones este producto a lo mucho tiene grado n - 1. (Véase el problema 15.9.) Esto hace
ck = 0 para k < n - 1 y
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
223
Note que, de acuerdo con la definición, el coeficiente de xn en Pn(x) será (2n!/2n(n!)2 comparamos los coeficientes de xn+1 en la expresión anterior para descubrir que
de donde cn+1 = (n + 1)/(2n + 1) resulta. Comparando los coeficientes de xn y recordando que sólo aparecen
las potencias alternas en cualquier polinomio de Legendre, conduce a cn = 0. Para determinar cn-1 regresamos a nuestras integrales. Con k = n - 1 imaginamos a Pk(x) escrito fuera de la suma de potencias. Sólo es
necesario considerar el término xn-1, puesto que los términos menores, incluso cuando se multiplican por x,
serán ortogonales a Pn(x). Esto lleva a
y utilizando los resultados de los problemas 15.10 y 15.11 se encuentra fácilmente que cn-1 = n/(2n + 1).
Sustituyendo estos coeficientes en nuestra expresión para xPn(x) llegamos a la recurrencia requerida. Como beneficio adicional tenemos también la integral
15.18 Ilustre el uso de la fórmula de recurrencia.
Tomando n = 5, encontramos
y con n = 6,
lo que confirma los resultados que se obtuvieron en el problema 15.15. El proceso de recurrencia es bastante adecuado en el cómputo automático de estos polinomios, en tanto que el proceso de diferenciación
del problema 15.15 no lo es.
15.19 Deduzca la identidad de Christoffel,
La fórmula de recurrencia del problema 15.17 puede multiplicarse por P,(i) para obtener
(2i + 1)xPi(x)Pi(t) = (i + 1)P i+1 (x)P i (t) + iPn-1(x)P(t)
Escribiendo esto también con los argumentos x y t invertidos (puesto que es cierto para cualesquiera x y t) y
www.elsolucionario.org
224
MÉTODOS NUMÉRICOS
sustrayendo después, tenemos
(2i + l)(t -x)P i (x)P i (t) = (i + 1)[Pi+1 (t)Pi(x) - Pi(t)Pi+1(x)] - i[Pi(t)Pi-1(x)-Pi-1(t)Pi(x)]
Sumando de i = 1 a i = n, y observando el "efecto amplificador" a la derecha, tenemos
El último término puede transferirse al lado izquierdo donde puede absorberse dentro de la suma como un
término i = 0. Ésta es la identidad de Christoffel.
15.20 Utilice la identidad de Christoffel para evaluar los coeficientes de integración correspondientes al caso
Gauss-Legendre, probando que Ak
Dejemos que xk sea un cero de Pn(x). Entonces el problema precedente, con t sustituido por xk, hace
que
Integre ahora de -1 a 1. Por un caso especial del problema 15.12, sólo se conserva el término i = 0 a la derecha, y tenemos
La fórmula de recurrencia con x - xk produce (n + 1)Pn+1(xk) = -nPn-1(xk) lo que nos permite la alternativa
Por los problemas 15.6 y 15.14 encontramos ahora
lo que lleva de inmediato al resultado que se quería.
15.21 Pruebe que (1 - x2)Pn'(x) + nxPn(x) - nPn-1(x), lo cual es útil para simplificar el resultado del problema 15.20.
Primero notamos que la combinación de (1 - x2)Pn' + nxPn es a lo mucho de grado n + 1. Sin embargo, con A representando los coeficientes principales de Pn(x), es fácil ver que xn+1 viene multiplicado por -nA +
nA y por ello no interviene. Puesto que Pn no contiene ningún término en xn+1 nuestra combinación tampoco
tiene término en xn. Su grado es a lo mucho n - 1 y por el problema 15.16 puede expresarse como
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
225
Procediendo como en el desarrollo de nuestra fórmula de recurrencia, podemos ahora multiplicar por Pk(x) e
integrar. A la derecha sólo queda el término k-ésimo, debido a la ortogonalidad, y obtenemos
integrando la primera integral por partes, la parte integrada es cero debido al factor (1 - x2). Esto deja
Para k < n - 1 ambos integrandos tienen a Pn(x) multiplicado por un polinomio de grado n -1 o menor. Por
el problema 15.9 todos los ck serán cero. Para k = n -1 la última integral está cubierta por el caso de la integral tratada en el problema 15.17. En la primera integral sólo el término que encabeza a Pn-1 contribuye
(otra vez por el problema 15.9) haciendo este término
Utilizando el problema 15.10, esto se reduce ahora a
Sustituyendo estos resultados, encontramos
lo que completa la prueba.
15.22 Aplique el problema 15.21 para obtener Ak
Haciendo x - xk, un cero de Pn(x), encontramos (1 -x²k)Pn' (xk) = nPn-1 (xk). El factor de la derivada
puede ser sustituido en nuestro resultado del problema 15.20, produciendo el resultado requerido.
15.23 La fórmula de integración de Gauss-Legendre puede expresarse ahora como
donde los argumentos xk son los ceros de Pn(x) y los coeficientes Ak se dan en el problema 15.22. Tabule
estos números para n = 2, 4, 6
16.
Para n = 2 resolvemos P2(x) - 1/2(3x2 - 1) = 0 para obtener xk = ±√1/3 = ± .57735027. Se comprueba que
los dos coeficientes son iguales. El problema 15.22 hace que Ak = 2(1 - 1/3)/ [4(1/3)] =1.
Para n = 4 resolvemos P4(x) = 1/5 (35x4 - 30x2 + 3) = 0 para encontrar xk2 = (15 ± 2 √ 3 0 ) / 3 5 , lo que
lleva a los cuatro argumentos xk = ± [(15 ± 2 √ 3 0 ) / 35 ] 1 / 2 .
El cálculo de éstos y su inserción en la fórmula del problema 15.22 produce los pares xk, Ak dados en
www.elsolucionario.org
226
MÉTODOS NUMÉRICOS
Tabla 15.1
n
xk
Ak
n
xk
Ak
2
±.57735027
14
4
±.86113631
±.33998104
1.00000000
.34785485
.65214515
6
±.93246951
±.66120939
±.23861919
±.98628381
±.92843488
±.82720132
±.68729290
±.51524864
±.31911237
±.10805495
.03511946
.08015809
.12151857
.15720317
.18553840
.20519846
.21526385
8
±.96028986
±.79666648
±.52553241
±.18343464
16
10
±.97390653
±.86506337
±.67940957
±.43339539
±.14887434
±.98940093
±.94457502
±.86563120
±.75540441
±.61787624
±.45801678
±.28160355
±.09501251
.02715246
.06225352
.09515851
.12462897
.14959599
.16915652
.18260342
.18945061
12
±.98156063
±.90411725
±.76990267
±.58731795
±.36783150
±.12533341
.17132449
.36076157
.46791393
.10122854
.22238103
.31370665
.36268378
.06667134
.14945135
.21908636
.26926672
.29552422
.04717534
.10693933
.16007833
.20316743
.23349254
.24914705
la tabla 15.1. Los resultados correspondientes a enteros n más grandes, se encuentran de la misma manera, determinándose los ceros de los polinomios de alto grado mediante el familiar método de Newton de
aproximaciones sucesivas. (Este método aparece en un capítulo posterior.)
15.24 Aplique la fórmula de los dos puntos a
El cambio de argumento t = π(x + 1)/4 convierte esto en nuestro intervalo estándar como
y los argumentos gaussianos xk = ± .57735027 conducen a y(x1) = .32589, y(x2) =.94541. La fórmula de los
dos puntos genera ahora (π/4)(.32589 + .94541) = .99848, que es correcto hasta casi tres lugares. La fórmula gaussiana de los dos puntos ha producido un mejor resultado que la regla trapezoidal con siete puntos (problema 14.17). ¡El error es dos décimos de 1 por ciento!
Es sorprendente observar lo que una fórmula de un punto podría haber hecho. Para n = 1 el resultado
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
de Gauss-Legendre es, como puede verificarse fácilmente
convierte en
227
Para la función seno esto se
que es correcta dentro de un 10 por ciento aproximadamente.
15.25 Explique la precisión de las fórmulas, en extremo simples, que se utilizaron en el problema 15.24, mostrando los polinomios en las cuales se basan.
La fórmula n - 1 puede obtenerse integrando el polinomio de colocación de grado cero, P(x) - y(x,) y(0). Sin embargo, puede obtenerse también, y ésta es la idea del método gaussiano, a partir del polinomio
de osculación de grado 2n - 1 = 1, que por la fórmula de Hermite es y(0) + xy'(0). La integración de esta
función lineal entre -1 y 1 produce el mismo 2y(0), donde el término de la derivada es cero. El polinomio de
colocación de grado cero genera la misma integral que un polinomio de primer grado, debido a que el punto
de colocación fue el punto gaussiano (Fig. 15-1).
Figura 15.1
De modo similar, la fórmula n = 2 puede obtenerse integrando el polinomio de colocación de grado
uno, donde los puntos de colocación son los gaussianos
donde
Esta misma fórmula se obtiene integrando el polinomio de osculación de tercer grado, ya que
El polinomio de primer grado funciona tan bien porque los puntos de colocación fueron los gaussianos (Fig. 15-2).
¡ Aplique la fórmula gaussiana de cuatro puntos a la integral del problema 15.24.
Empleando el mismo cambio de argumento, la fórmula de cuatro puntos produce
correcta hasta seis lugares. Comparando con el resultado de 32 puntos de Simpson de 1.0000003 y el de
Simpson de 64 puntos de .99999983, la encontramos superior a cualquiera de los dos.
www.elsolucionario.org
228
MÉTODOS NUMÉRICOS
Fig. 15-2
15.27 Adapte la estimación del error de truncamiento del problema 15.2 al caso especial de la aproximación de
Gauss-Legendre.
Combinando los problemas 15.2, 15.11 y 15.14, encontramos que el error es
No se trata de una fórmula sencilla de aplicar si las derivadas de y(x) don difíciles de calcular. Sin embargo,
hay una idea adicional en torno a la precisión de las fórmulas gaussianas, al calcular el coeficiente de y(2n)
para n pequeña.
15.28 Aplique la estimación del error del problema 15.27 a la integral del problema 15.24 y compare con los
errores reales.
Después del cambio de argumento que lleva a esta integral a nuestra forma estándar, encontramos
Para n = 2 esto hace nuestra estimación del error E = (.0074)(.298) = .00220, en tanto que para n = 4 encontramos E = (.0000003)(.113) = .00000003. Los errores reales fueron .00152 y, hasta en seis lugares, cero. Así que nuestras estimaciones son consistentes con nuestros resultados.
Este ejemplo ofrece una situación favorable. La función seno se fácil de integrar, incluso por medio de
métodos aproximados, debido a que sus derivadas están acotadas por la misma constante, esto es, 1. Las
potencias de π/4 entran con el cambio de argumento, y realmente ayudan en este caso. El siguiente ejemplo trata una función familiar cuyas derivadas no se comportan tan favorablemente.
15.29 Aplique la fórmula de Gauss-Legendre a
log (1 + t) dt.
El valor correcto hasta en seis lugares de esta integral es
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
229
El cambio de argumento t = π(x +1)/4 convierte la integral en
La cuarta derivada del nuevo integrando es (π/4)5[ -6/(1 +t) 4 ]. En el intervalo de integración ésta no puede
exceder a 6(π/4)5, por lo que el error de truncamiento no puede ser mayor que 6(π/4)5(.0074) si utilizamos la
fórmula gaussiana de dos puntos. Esto es seis veces la estimación correspondiente a la integral de la función seno. De modo similar, la octava derivada es (Π/4) 9 [-7!/(1 + f)8]. Esto significa un error de truncamiento
cuando mucho de (π/4)9. 7!(.0000003) que es 7! veces la estimación correspondiente para la integral de la
función seno. En tanto que las derivadas sucesivas de la función seno permanezcan acotadas por 1, aquellas de la función logaritmo aumentan como factoriales. La diferencia tiene un efecto evidente en los errores
de truncamiento de cualquiera de nuestras fórmulas, en especial, tal vez, en las fórmulas gaussianas, donde en particular se incluyen derivadas de alto orden. Aun así, estas fórmulas funcionan bien. Utilizando sólo
dos puntos obtenemos .858, en tanto que para cuatro puntos se maneja .856592, lo cual se aleja por sólo
dos unidades en el último lugar. La fórmula gaussiana de seis puntos se anota un acierto hasta de seis lugares, aun cuando su término del error de truncamiento implica a y(12)(x), cuyo tamaño es aproximadamente de 12!. En contraste, la regla de Simpson requiere 64 puntos para producir el mismo resultado de seis lugares.
La función log (1 + t) tiene una singularidad en t = - 1 . Esto no está en el intervalo de integración, pero
está cerca, e incluso una singularidad compleja cercana podría producir el tipo de convergencia que se observa aquí.
15.30 ¿Cómo afecta la longitud del intervalo de integración a las fórmulas gaussianas?
Para una integral sobre el intervalo a < r < b, el cambio de argumento t - a
intervalo estándar -1 < x < 1. También da como resultado
(x + 1) produce el
El efecto del error de truncamiento está en el factor de la derivada, que es
En los ejemplos que acaban de presentarse, b - a fue π/2 y esta longitud del intervalo ayuda a reducir el
error, pero con un intervalo más largo el potencial de las potencias de b - a, resulta claro que magnifica el
error.
15.31 Aplique el método de Gauss a
Las derivadas de mayor orden de esta función error no son fáciles de estimar de manera realista. Pro­
cediendo con los cálculos, se encuentra que las fórmulas n - 4, 6, 8,10 dan los resultados:
n
4
6
8
10
Aproximación
.986
1.000258
1.000004
1.000000
www.elsolucionario.org
MÉTODOS NUMÉRICOS
230
En el caso de valores mayores de n, los resultados concuerdan con el de n = 10. Esto indica una precisión
hasta en seis lugares. Ya hemos calculado esta integral por medio de la paciente aplicación de la serie de
Taylor (problema 14.32) y encontrado que es igual a 1, y correcta hasta en seis lugares. En comparación, la
fórmula de Simpson requiere 32 puntos para alcanzar una precisión de seis lugares.
15.32 Aplique el método gaussiano a
Las fórmulas n = 4, 8,12,16 producen los resultados
4
8
12
16
6.08045
6.07657
6.07610
6.07600
n
Aproximación
Esto indica una precisión hasta de cuatro lugares. La integral exacta puede encontrarse, mediante un cam­
bio de argumento, que corresponde a 8/5 (2√3 +1/3), que es 6.07590 correcto hasta en cinco lugares. Obsér­
vese que la precisión obtenida aquí es inferior a la del problema anterior. La explicación radica en nuestro
integrando de la raíz cuadrada no es tan uniforme como la función exponencial. Sus derivadas de mayor or­
den alcanzan grandes valores, como los factoriales. El resto de nuestras fórmulas también sienten la in­
fluencia de estas grandes derivadas. La regla de Simpson produce, por ejemplo, estos valores:
Núm. de puntos
16
64
256
1024
Valores de Simpson
6.062
6.07411
6.07567
6.07586
Incluso con un millar de puntos no permite la precisión que se alcanzó en el problema anterior con sólo 32
puntos.
15.33 Deduzca la estimación de Lanczos para el error de truncamiento de las fórmulas gaussianas.
La relación
se cumple exactamente. Sea / la integral aproximada de
y(x) obtenida mediante la fórmula gaussiana de n puntos, e /* el resultado correspondiente para [xy(x)]'
Puesto que [xy(x)]' = y(x) + xy'(x),
por lo que el error en /* es
Llamando E al propio error en /, sabemos que
para θ1 y θ2 adecuadas entre -1 y 1. Suponga que θ1 = θ2 = 0. Por un lado (xy)(2n+1) (0)/(2n)! es el coeficien­
te de x2n en el desarrollo de la serie de Taylor de (xy)', en tanto que por el otro
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
231
que lleva directamente a
de la cual deducimos
En consecuencia, E* - (2n + 1)£ aproximadamente, produciendo
Esto implica la aplicación de la fórmula gaussiana a xy'(x) así como a la misma y(x), pero evita el cálculo de
y(2n)(x), a menudo problemático. Al dejar θ1 = θ2 = 0 se establece la clave para la deducción de esta fórmula.
Se ha encontrado que esto es más razonable para integrandos uniformes tales como el del problema 15.31,
que para integrandos con derivadas grandes, lo que parece ser razonable puesto que y(2n)(θ1)/y(2n)(θ2) de­
be ser cercano a 1 cuando y(2n+1) es pequeño.
15.34 Aplique la estimación del error del problema anterior a la integral del problema 15.31.
Para n - 8 la estimación de Lanczos es .000004, lo que es idéntico al error real. Para n = 10 y valores
mayores, la estimación de Lanczos predice correctamente un error cero hasta en seis lugares. Sin embar­
go, si se aplica a la integral del problema 15.32, en el cual el integrando no es muy uniforme, muestra que
la estimación de Lanczos es demasiado conservadora para ser útil. Los límites de la utilidad de esta fórmula
de error aún tienen que determinarse.
O T R A S FÓRMULAS GAUSSIANAS
15.35 ¿Cuáles son las fórmulas de Gauss-Laguerre?
Estas fórmulas para la integración aproximada son de la forma
siendo los argumentos xi los ceros del polinomio n-ésimo de Laguerre
y los coeficientes Ai
El error de truncamiento es
Se observa que los resultados son muy similares a los del caso Gauss-Legendre. Aquí la función de
peso es w(x) = e-x. La fórmula de n puntos es exacta para polinomios de grado hasta 2n - 1. En la tabla
15.2 se proporcionan argumentos y coeficientes.
www.elsolucionario.org
232
MÉTODOS NUMÉRICOS
15.36 Aplique la fórmula de un punto de Gauss-Laguerre en la integración de e -x .
Puesto que L1(x) = 1 - x, tenemos un cero en x1 = 1. El coeficiente es A1 = 1/[L'1(1 )]2 que también es 1
La fórmula de un punto es, por tanto
Tabla 15.2
Ak
n
xk
Ak
12
3.41421356
.85355339
.14644661
4
.32254769
1.74576110
4.53662030
9.39507091
.60315410
.35741869
.03888791
.00053929
6
.22284660
1.18893210
2.99273633
5.77514357
9.83746742
15.98287398
.45896467
.41700083
.11337338
.01039920
.00026102
.00000090
.11572212
.61175748
1.51261027
2.83375134
4.59922764
6.84452545
9.62131684
13.00605499
17.11685519
22.15109038
28.48796725
37.09912104
.26473137
.37775928
.24408201
.09044922
.02010238
.00266397
.00020323
.00000837
.00000017
.00000000
.00000000
.00000000
14
8
.17027963
.90370178
2.25108663
4.26670017
7.04590540
10.75851601
15.74067864
22.86313174
.36918859
.41878678
.17579499
.03334349
.00279454
.00009077
.00000085
.00000000
10
.13779347
.72945455
1.80834290
3.40143370
5.55249614
8.33015275
11.84378584
16.27925783
21.99658581
29.92069701
.30844112
.40111993
.21806829
.06208746
.00950152
.00075301
.00002826
.00000042
.00000000
.00000000
.09974751
.52685765
1.30062912
2.43080108
3.93210282
5.82553622
8.14024014
10.91649951
14.21080501
18.10489222
22.72338163
28.27298172
35.14944366
44.36608171
.23181558
.35378469
.25873461
.11548289
.03319209
.00619287
.00073989
.00005491
.00000241
.00000006
.00000000
.00000000
.00000000
.00000000
n
2
xk
.58578644
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
233
En este caso y(x) = 1 y obtenemos la integral exacta, que es 1. Esto no es una sorpresa, puesto que con n = 1
tenemos la garantía de resultados exactos para cualquier polinomio de primer grado o menor. De hecho
con y(x) = ax + b la fórmula produce
que es el valor correcto.
15.37 Aplique el método de Gauss-Laguerre a
Se encuentra fácilmente que el valor de esta integral es 1/2. La uniformidad de sen x, por la cual se en­
tiende el acotamiento de sus derivadas, indica que nuestra fórmula funciona bien. La estimación del error
de (n!)2/(2n)!, que sustituye y(2n) por su máximo de 1, se reduce a 1/924 para n = 6 e indica una precisión de tres
lugares. En realidad, sustituyendo en
sen xi se producen los resultados
n
2
6
10
14
∑
.43
.50005
.5000002
.50000000
por lo que nuestra fórmula del error es algo pesimista.
15.38 Aplique el método de Gauss-Laguerre a
La poca uniformidad de y(t) = 1/t, que significa que su n-ésima derivada
crece rápidamente con n, no indica una gran confiabilidad en las fórmulas de aproximación. Con el cambio
de argumento t = x +1, esta integral se convierte en nuestro intervalo estándar en
y la fórmula del error se vuelve
que se reduce a (n!)2/e(θ + 1) 2n+1 . Si hacemos θ=0, obtenemos el valor máximo de E, lo cual es desesti­
mulante y no nos proporciona información alguna. Los cálculos con la fórmula
producen estos resultados
n
2
6
10
14
Aproximación
.21
.21918
.21937
.21938
www.elsolucionario.org
MÉTODOS NUMÉRICOS
234
Puesto que el valor correcto hasta en cinco lugares es .21938 vemos que el pesimismo exagerado fue inne­
cesario. El argumento 6 parece aumentar con n. La comparación de los errores real y teórico permite que 6
sea determinado:
n
2
6
10
e
1.75
3.91
5.95
En este ejemplo la función y(x) tiene una singularidad en x = - 1 . Incluso una singularidad compleja
próxima al intervalo de integración puede producir la lenta convergencia que se evidencia aquí. (Compare
con el problema 15.29.) La convergencia es más rápida si nos alejamos de la singularidad. Por ejemplo la
integración de la misma función por medio del mismo método sobre el intervalo de 5 a ∞ lleva a los siguien­
tes resultados:
n
Aproximación
2
6
10
.001147
.0011482949
.0011482954
El último valor es correcto casi hasta diez lugare
15.39 ¿Cuáles son las fórmulas de Gauss-Hermite?
Son de la forma
donde los argumentos xi son los ceros del polinomio n-ésimo de Hermite.
y los coeficientes A,,
El error de truncamiento es
Estos resultados se obtienen de manera análoga al caso de Gauss-Legendre. Aquí la función de peso es
w(x) - e-x^2. La fórmula de n puntos es exacta para polinomios de hasta grado 2n - 1. En la tabla 15.3 se pre­
sentan los argumentos y los coeficientes.
15.40 Aplique la fórmula de dos puntos de Gauss-Hermite a la integral
Puede obtenerse un resultado exacto, por lo que calculamos primero
www.elsolucionario.org
235
INTEGRACIÓN GAUSIANA
Tabla 153
n
xk
Ak
n
xk
A*
2
± .70710678
.88622693
12
4
± .52464762
±1.65068012
.80491409
.08131284
6
± .43607741
±1.33584907
±2.35060497
.72462960
.15706732
.00453001
± .31424038
± .94778839
±1.59768264
±2.27950708
±3.02063703
±3.88972490
.57013524
.26049231
.05160799
.00390539
.00008574
.00000027
14
8
± .38118699
±1.15719371
±1.98165676
±2.93063742
.66114701
.20780233
.01707798
.00019960
10
± .34290133
±1.03661083
±1.75668365
±2.53273167
±3.43615912
.61086263
.24013861
.03387439
.00134365
.00000764
± .29174551
± .87871379
±1.47668273
±2.09518326
±2.74847072
±3.46265693
±4.30444857
.53640591
.27310561
.06850553
.00785005
.00035509
.00000472
.00000001
Los ceros de este polinomio son
mente que los coeficientes Ai son
xk
= A partir de la fórmula del problema 15.39 se encuentra fácil­
Por tanto, la fórmula de dos puntos es
Con y(x) = x2 ésta se convierte en
15.41 Evalúe
que es el valor exacto de la integral.
x dx correcta hasta en seis lugares.
La fórmula de Gauss-Hermite produce los resultados:
n
2
4
6
8
10
Aproximación
.748
.5655
.560255
.560202
.560202
Esto parece indicar una precisión de seis lugares y el resultado es en realidad correcto hasta seis lugares,
siendo la integral exacta
que comprende hasta ocho lugares: .56020226.
15.42 Evalúe
dx correcta hasta en tres lugares.
El factor de la raíz cuadrada no es tan uniforme como la función seno del problema precedente, por lo
que no debemos esperar una convergencia tan rápida, y no conseguirla.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
236
n
2
4
6
8
10
12
Aproximación
.145
.151
.15202
.15228
.15236
.15239
Se observa que el valor es .152.
15.43 ¿Cuáles son las fórmulas de Gauss-Chebyshev?
Son de la forma gaussiana con w(x) = 1/√1 - x 2 ,
donde los argumentos x, son los ceros del polinomio n-ésimo de Chebyshev
Tn (x) = cos (n arccos x)
En contra de lo que parece, se trata en realidad de un polinomio de grado n, y sus ceros son
Todos los coeficientes Ai son simplemente π/n. El error de truncamiento es
15.44 Aplique la fórmula de Gauss-Chebyshev para n = 1 con el fin de verificar el resultado familiar
Para n = 1, encontramos Tn(x) = cos (arccos x) = x. Puesto que hay sólo un cero, nuestra fórmula fra­
casa en πy(0). Puesto que la fórmula gaussiana con n = 1 es exacta para polinomios de primer grado o me­
nos, la integral dada es exactamente π . y(0) = π.
15.45 Aplique la fórmula
Directamente de la definición encontramos
fórmula de Gauss-Chebyshev produce en esas condiciones
exacto.
por lo que
www.elsolucionario.org
La
lo cual también es
INTEGRACIÓN GAUSIANA
237
Problemas suplementarios
15.46 Demuestre que Pn' = xP'n-1(x) + nPn-1(x), empezando de la manera siguiente. De la definición de los po­
linomios de Legendre,
Aplique el teorema de la n-ésima derivada de un producto para encontrar
15.47 Demuestre que (1 - x2)Pn(2),(x) - 2xPn'(x) + n(n + 1)Pn(x) = 0, de la forma siguiente. Sea z = (x2 - 1)n. Entonces z' = 2nx(x2 - 1)n-1 haciendo (x2 - 1)z' - 2nxz = 0. Diferenciando repetidamente esta ecuación, se obtiene
(x2 - l)z(2) - (2n - 2)xz ' - 2nz = 0
(x2 - l)z (3) - (2n - 4)xz(2) - [2n + (2n - 2)]z' = 0
2
3
(x - 1)z
- (2n - 6)xz(3) - (2n + (2n - 2) + (2n - 4)]z(2) = 0
y por último
(x2 - l)z (n+2) - (2n - 2n - 2)xz(n+1) - [2n + (2n - 2) + (2n - 4) + ... + (2n - 2n)]zn = 0
que se simplifica a
(x2 - l)z (n+2) + 2xz(n+1) - n(n + 1)z(n) = 0
Puesto que Pn(x) = zn/2nn!, se obtienen los resultados que se requerían.
15.48 Diferencie el resultado del problema 15.21 y compárelo con el problema 15.47 para demostrar
xP' n (x)-P' n-1 (x) = nPn(x)
15.49 Utilice el problema 15.21 para demostrar que para todo n, Pn(1) = 1, Pn(-1) = (-1)n.
15.50 Utilice el problema 15.46 para demostrar que Pn'(1) = 1/2 n(n + 1), Pn'(-1) = (-1)n+1 Pn'(1).
15.51 Use el problema 15.46 para demostrar que
Pnk)(x) = xPn-1(x) + (n+k-1)P(k-1)n-1(x)
Aplique después el método de la suma de diferencias para verificar
www.elsolucionario.org
MÉTODOS NUMÉRICOS
238
y en general
Puesto que los polinomios de Legendre son funciones par o impar, compruebe también que
15.52 Utilice el problema 15.46 y 15.48 para probar que
15.53 El coeficiente principal en Pn(x) es, como sabemos, An = (2n)! / 2n(n!)2. Muestre que puede también escribirse como
15.54 Calcule los argumentos y los coeficientes de Gauss-Legendre para el caso n - 3, mostrando que los ary los coeficientes a 8/9 para xk = 0 y 5/9 para los otros argumentos.
gumentos corresponden a
15.55 Compruebe los argumentos y coeficientes de Gauss-Legendre que se muestran a continuación para el
caso n = 5:
Ak
xk
0
±.53846931
±.90617985
.56888889
.47862867
.23692689
15.56 Aplique la fórmula gaussiana de tres puntos del problema 15.54 a la integral de la función seno,
¿Como se compara el resultado con el que se obtiene mediante la regla de Simpson, utilizando siete pun­
tos (problema 14.17)?
15.57 Aplique la fórmula de Gauss-Legendre de dos puntos (n = 2) en
de π/2 ≈1.5708.
y compare con el valor exacto
15.58 Grafique los polinomios de colocación lineal y de osculación cúbica que conducen a la fórmula n = 2,
empleando la función y(t) = 1/(1 + t2) del problema 15.57. (Véase el problema 15.25.)
hasta en cuatro lugares? Aplique también
15.59 ¿Con qué exactitud nuestras fórmulas verifican
algunas de nuestras fórmulas con argumentos igualmente espaciados a esta integral. ¿Cuál algoritmo fun­
ciona mejor? ¿Cuáles son los más sencillos de aplicar en forma manual? ¿Cuáles son los más sencillos de
programar para la computación automática?
15.60 Como en el problema 15.59 aplique métodos diferentes a
mejor para computo automático.
y decida qué algoritmo es
15.61 Calcule los polinomios de Laguerre hasta n = 5 a partir de la definición dada en el problema 15.35.
www.elsolucionario.org
INTEGRACIÓN GAUSIANA
239
15.62 Encuentre los ceros de L2(x) y verifique los argumentos y coeficientes que se dan en la tabla 15.2 para n = 2.
15.63 Utilice el método del problema 15.9 para demostrar que Ln(x) es ortogonal a cualquier polinomio de grade
menor que n, en el sentido de que
donde p(x) es cualquier polinomio de tales características.
15.64 Demuestre que
por medio del método de los problemas 15.10 y 15.11.
15.65 Aplique la fórmula de Gauss-Laguerre de dos puntos para obtener estos resultados exactos:
15.66 Encuentre los argumentos y coeficientes exactos para la integración de Gauss-Laguerre de tres puntos.
15.67 Use la fórmula del problema anterior para verificar
15.68 Aplique las fórmulas n = 6 y n = 8 a la integral uniforme
15.69 Aplique las fórmulas n = 6 y n = 8 a la integral no uniforme
15.70 Demuestre que
es correcta hasta cuatro lugares.
15.71 Calcule los polinomios de Hermite con n = 5 a partir de la definición dada en el problema 15.39.
15.72 Muestre que la fórmula de Gauss-Hermite de un punto es
polinomios de grado uno o menor. Aplíquela a y(x) = 1.
Lo cual es exacto para
15.73 Deduzca la fórmula exacta para la aproximación de Gauss-Hermite n = 3. Apliquela al caso y(x) = x4 para
obtener un resultado exacto.
15.74 ¿Con qué aproximación las fórmulas de cuatro puntos y ocho puntos reproducen el siguiente resultado?
15.75 ¿Con qué aproximación las fórmulas de cuatro puntos y ocho puntos reproducen este resultado?
www.elsolucionario.org
240
15.76 Muestre que
15.77 Evalúe
15.78 Evalúe
MÉTODOS NUMÉRICOS
es correcta hasta en tres lugares.
con una aproximación de tres lugares.
correcta hasta con una aproximación de tres lugares.
15.79 Aplique la fórmula de Gauss-Chebyshev n = 2 para la comprobación exacta de
15.80 Encuentre la siguiente integral correcta hasta en tres lugares:
15.81 Encuentre la siguiente integral correcta hasta en dos lugares:
www.elsolucionario.org
Casos especiales en
la integración numérica
16
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el concepto de impropiedad (singularidad) en una integral
(Introducción).
2. Expresar con sus propias palabras las fuentes de error involucradas en las integrales impropias
(singulares) (Problema 16.1).
3.
Determinar cuando una integral es impropia (singular), ayudándose de la observación y realizando la
evaluación directa (Problemas 16.2 a 16.4,16.9,16.11,16.13,16.14,16.21 a 16.26).
4. Explicar con sus propias palabras el procedimiento de ignorar la impropiedad y aplicarlo en problemas
prácticos al hacer el tratamiento de integrales impropias (singulares) (Problemas 16.2 a 16.4,16.11,
16.17,16.1916.21 a 16.26).
5. Explicar con sus propias palabras el procedimiento de desarrollar en series y aplicarlo en problemas
prácticos al hacer el tratamiento de integrales impropias (Problemas 16.5,16.8 a 16.10,16.15,16.18,
16.20 a 16.26).
6. Explicar con sus propias palabras el procedimiento de sustraer la impropiedad y aplicarlo en
problemas prácticos al hacer el tratamiento de integrales impropias (Problemas 16.6,16.16).
7. Explicar con sus propias palabras el procedimiento de cambiar de argumento y aplicarlo en problemas
prácticos al hacer el tratamiento de integrales impropias (Problemas 16.7,16.12,16.21 a 16.26).
8. Explicar con sus propias palabras el procedimiento de diferenciar con respecto a un parámetro y
aplicarlo en problemas prácticos al hacer el tratamiento de integrales impropias (Problemas 16.12,
16.21 a 16.26).
9. Explicar con sus propias palabras los procedimientos de integración gaussiana y aplicarlos en los
problemas prácticos al hacer el tratamiento de integrales impropias (Capítulo 15).
10. Explicar con sus propias palabras el procedimiento de series asintóticas y aplicarlo en problemas
prácticos al hacer el tratamiento de integrales impropias (Problema 16.10 y Capítulo 17).
11. Comparar la aplicación del método de Simpson reduciendo el incremento, al hacer el tratamiento de
integrales impropias (Problemas 16.13,16.14 y Capítulo 14).
12. Aplicar el concepto de integrales impropias en problemas de física (Problemas 16.27 a 16.29).
www.elsolucionario.org
242
MÉTODOS NUMÉRICOS
APLICACIONES DE LOS CASOS ESPECIALES EN LA INTEGRACIÓN NUMÉRICA:
Como hemos visto en los cursos de cálculo, existen funciones que no nos garantizan un comportamiento estable, ni nos proporcionan facilidad en su operación (en algunos casos las funciones podrán tener discontinuidades, etc.); ésta es la razón de la existencia del tema, ya que nos brinda herramientas más sólidas al hacer el
análisis y el tratamiento de algún problema en particular, debido a que en la práctica no nos podemos conformar
con los métodos típicos de integración, cuando la función no se comporta de una manera típica.
Las integrales impropias o singulares difieren de las integrales definidas en que uno de los límites de integración no es un número real. También se dan integrales impropias con dos límites de integración infinitos.
Un punto impropio (o singular, debido a que es único, original y particular) en una curva algebraica es
aquel para el cual dy/dx tiene la forma indeterminada 0/0.
Los métodos vistos para realizar la integración numérica se basan en el supuesto de que se ha obtenido una buena aproximación de la función original.
Este capítulo más que ser parte sustancial de lo que tradicionalmente tratan los métodos numéricos, nos servirá como apoyo adicional al enfrentar problemas de este tipo y para formar nuestro criterio al confrontar problemas de la vida real que requieran de la integración numérica.
Las integrales impropias con límites de integración infinitos, tienen gran aplicación en física, ya que como
se podrá apreciar en los problemas complementarios 16.27 a 16.29, se usan para definir el trabajo realizado al
mover un cuerpo desde un punto hacia el infinito; este cuerpo puede ser desde una partícula hasta un proyectil.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas
Manejo de funciones discretas
Diferencias divididas
Polinomios factoriales
Sumas (sumatorias)
Sumas y series
La fórmula de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equiespaciados
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Casos especiales en la integración numérica
www.elsolucionario.org
2
10
11
13
14
21
22
23
24
3
4
5
17
6
7
8
9
12
13
14
15
16
CASOS ESPECIALES DE LA INTEGRACIÓN NUMÉRICA
243
INTEGRALES SIMPLES CON PUNTOS DE SINGULARIDAD
Sería imprudente aplicar a ciegas las fórmulas de los dos capítulos anteriores. Dichas fórmulas se basan en la su­
posición de que la función y(x) puede aproximarse en forma conveniente mediante un polinomio p(x). De no ser
cierto, las fórmulas pueden producir resultados, si no por completo engañosos; sí pobres. Sería conveniente ase­
gurarse de que nunca se efectuará la siguiente aplicación de la regla de Simpson:
pero puntos singulares menos obvios pudieron, quizás, pasarse por alto temporalmente. Los esfuerzos relativos a
la aplicación de fórmulas basadas en polinomios en funciones que tienen puntos singulares en sus derivadas no
son lo suficientemente adecuados. Puesto que los polinomios crean generaciones interminables de derivadas uni­
formes, éstas no son ideales para tales funciones, y suelen obtenerse resultados pobres.
PROCEDIMIENTOS P A R A INTEGRALES SIMPLES
Existe una variedad de procedimientos para trabajar con integrales simples, ya sea para integrandos con singulari­
dades o para un intervalo infinito de integración. Los siguientes procedimientos serán ilustrados:
1. Ignorar la singularidad puede, incluso, ser conveniente. Bajo ciertas circunstancias es suficiente utilizar
más y más puntos xi hasta que se logra un resultado satisfactorio.
2.
El desarrollo en serie de todo o una parte del integrando, seguido por una integración de término por tér­
mino, es un procedimiento popular siempre que la convergencia sea lo bastante rápida.
3.
La eliminación de la singularidad corresponde a dividir la integral en una integral simple que responda a
los métodos clásicos de análisis, y en una integral simple a la cual se le puedan aplicar nuestras fórmulas
de integración aproximada sin preocupación.
4.
El cambio de variable es una de las armas más poderosas del análisis. De ese modo puede intercam­
biarse una singularidad difícil por una más manejable, o puede eliminarse por completo la singularidad.
5.
La diferenciación relativa a un parámetro implica incrustar la integral dada en una familia de integrales
y exhibir después algunas propiedades básicas de la familia mediante diferenciación.
6.
Los métodos gaussianos tratan también con ciertos tipos de singularidad, como mostrará la referencia al
capítulo anterior.
*
7.
Las series asintóticas también son importantes, pero este procedimiento se trata en el siguiente capítulo.
Problemas resueltos
16.1
Compare los resultados de la aplicación de la regla de Simpson en la integración de √x cerca de 0 y tejos
de 0.
Considere primero el intervalo entre 1 y 1.30 con h = .05, ya que efectuamos este cálculo antes (pro­
blema 14.11). La regla de Simpson dio un resultado correcto de hasta cinco lugares. Incluso la regla trape­
zoidal dio un error de sólo .00002. Aplicando ahora la regla de Simpson al intervalo entre 0 y.30, que tiene
www.elsolucionario.org
244
MÉTODOS NUMÉRICOS
Co­
la misma longitud pero incluye un punto singular de la derivada de √x, obtenemos
mo la cifra correcta es .10954, nuestro resultado tiene un error de hasta tres lugares. El error es más de
cien veces mayor.
16.2
¿Qué efecto hay al ignorar la singularidad en la derivada de √x y al aplicar la regla de Simpson con inter­
valos h sucesivamente más pequeños?
Polya ha demostrado (Math. Z., 1933) que para funciones de este tipo (continuas con singularidades
en las derivadas) la regla de Simpson y otras de tipo similar deben converger a la integral correcta. Los
cómputos muestran estos resultados:
La convergencia a § es lenta pero se observa que está ocurriendo.
16.3
Determine el efecto de ignorar la singularidad y aplicar la regla de Simpson a la siguiente integral:
Aquí el integrando no está definido para x = 0, extremo inferior de integración, y su límite cuando x ‒> 0
es infinito, pero Davis y Rabinowitz han probado (SIAM Journal, 1965) que la convergencia debe ocurrir.
Ellos también han encontrado que la regla de Simpson produce los siguientes resultados, lo que muestra
que a veces se obtienen buenos resultados al ignorar la singularidad:
1/h
64
Integral aprox.
1.84 1.89 1.92 1.94 1.96 1.97
128
256
512
1024 2048
La convergencia también es lenta pero se observa que está ocurriendo. Con las velocidades actuales
de cómputo, la convergencia lenta no es suficiente para descartar un algoritmo de cómputo. Sin embargo,
persiste la pregunta usual de cuánto afectarán los cálculos prolongados al error de redondeo. Para esta
misma integral la regla trapezoidal con h = 1/4096 da como resultado 1.98, en tanto que la aplicación de la
fórmula de Gauss de 48 puntos en cuartos de intervalo (192 puntos en total) produce 1.99.
16.4 Determine el resultado que produce ignorar la singularidad y aplicar las reglas de Simpson y Gauss a la si­
guiente integral:
En este caso el integrando no está definido para x = 0 y su límite cuando x ‒> 0 es infinito y es ade­
más altamente oscilatorio. Puede esperarse que la combinación de esos problemas produzcan dificultades
en el cálculo numérico. Davis y Rabinowitz (véase el problema anterior) encontraron que la regla de Simp­
son falla
1/h
64
128
256
512
Integral aprox.
2.31
1.69 -.60 1.21
www.elsolucionario.org
1024 2048
.72
.32
CASOS ESPECIALES DE LA INTEGRACIÓN NUMÉRICA
245
y la fórmula de Gauss de 48 puntos no brinda mejores resultados. Así que la singularidad no siempre puede
ignorarse.
16.5
Evalúe hasta en tres lugares la integral singular
La utilización directa de la serie de Taylor conduce a
Después de los primeros términos la serie converge rápidamente y de requerirse, se puede lograr con facili­
dad una gran precisión. Note que la singularidad 1/√x se ha manejado como el primer término de la serie.
(Véase también el problema siguiente.)
16.6
Aplique el método de la "eliminación de la singularidad" a la integral del problema 16.5
Llamando / a la integral, tenemos
La primera integral es elemental y la segunda no tiene singularidad. Sin embargo, puesto que (ex - 1)/√x se
comporta como √x cerca de cero, tiene una singularidad en su primera derivada. Esto es suficiente, como
vimos en el problema 16.1, para hacer inexacta la integración aproximada.
La idea de la eliminación puede extenderse para llevar la singularidad a una derivada de mayor or­
den. Por ejemplo,
Los términos adicionales de la serie correspondiente a la función exponencial pueden sustraerse si es ne­
cesario. La primera integral aquí es 8/3, y la segunda puede manejarse con nuestras fórmulas, aunque el mé­
todo de las series sigue siendo preferible en este caso.
16.7
Evalúe la integral del problema 16.5 por un cambio de variable.
El cambio de variable, puede ser el artificio más poderoso en la integración. En este caso sea t = √x y
entonces I = 2∫10 et2dt, la cual no tiene singularidades de ningún tipo, incluso en sus derivadas. Esta integral
puede ser evaluada por cualquiera de nuestras fórmulas o por un desarrollo en serie
16.8
Evalúe ∫10 (cos x)(log x) dx correcta hasta en seis lugares decimales.
Aquí se sigue un procedimiento similar al del problema 16.5. Empleando la serie para cos x, la integral
se convierte en
www.elsolucionario.org
246
MÉTODOS NUMÉRICOS
Empleando la integral elemental
la integral es sustituida por la serie
que se reduce a -.946083.
16.9
Evalúe
mediante un cambio de variable que convierte el intervalo infinito de integración en un
intervalo finito.
Sea x = 1/t. En consecuencia la integral se convierte en
que puede calcularse por medio
de diversos métodos de aproximación. La elección de la serie de Taylor da como resultado
que es .310268 hasta seis lugares, contribuyendo sólo cuatro términos.
16.10 Muestre que el cambio de variable utilizado en el problema 16.9 convierte
en una integral sin-
guiar difícil de evaluar, por lo que la reducción del intervalo de integración a una longitud finita no siempre
es un procedimiento útil.
que se encontró en el problema 16.4, la cual oscila,
Con x = 1/t obtenemos la integral
en forma desfavorable, cerca de cero, haciendo casi imposible la integración numérica. La integral de este
problema puede manejarse mejor por medio de métodos asintóticos que se estudiarán en el siguiente capí­
tulo.
16.11 Calcule
mediante la evaluación directa entre los ceros de sen x, desarrollando de ese modo
parte de una serie alternante.
Aplicando la fórmula de Gauss de 8 puntos a cada uno de los intervalos sucesivos, y así sucesiva­
mente, se encuentran los resultados:
Intervalo
Integral
Intervalo
Integral
(1,2)
(3,4)
(5,6)
(7,8)
(9,10)
-.117242
-.001285
-.000130
-.000027
-.000008
(2,3)
(4,5)
(6,7)
(8,9)
.007321
.000357
.000056
.000014
www.elsolucionario.org
CASOS ESPECIALES DE LA INTEGRACIÓN NUMÉRICA
247
El total es -.11094, el cual es correcto hasta en cinco lugares.
Este método de evaluación directa para un intervalo de longitud finita se asemeja en espíritu al méto­
do de ignorar la singularidad. El límite superior es sustituido realmente por un sustituto finito, en este caso
diez, más allá del cual la contribución a la integral debe considerarse cero para la precisión requerida.
por diferenciación relativa de un parámetro.
Este problema ilustra aun otro planteamiento al problema de la integración. Empezamos por colocar el
problema dentro de una familia de problemas similares. Para f positiva, dejamos
Puesto que la rápida convergencia de esta integral permite la diferenciación bajo el signo integral, encontra­
mos a continuación
Introduciendo ahora el cambio de variable y = t/x, lo cual posibilita la atractiva simplificación
De tal modo F(t) = Ce - 2 t y la constante C puede evaluarse a partir del resultado conocido
El resultado es
En el caso especial t = 1, esto produce .119938 correcto hasta en seis dígitos.
Problemas suplementarios
16.13 Compare los resultados que produce la aplicación de la regla de Simpson con
16.14 Utilice intervalos h sucesivamente más pequeños para la segunda integral del problema 16.13 y note la
convergencia hacia el valor exacto de -1/4.
16.15 Evalúe hasta tres lugares mediante el desarrollo en serie:
16.16 Aplique el método de la eliminación de la singularidad a la integral del problema 16.15, obteniendo una in­
tegral elemental y una integral que no implique ninguna singularidad hasta la segunda derivada.
www.elsolucionario.org
248
MÉTODOS NUMÉRICOS
16.17 Ignore la singularidad en la integral del problema 16.15 y aplique las fórmulas de Simpson y de Gauss,
usando continuamente más puntos. ¿Converge el resultado hacia el valor calculado en el problema 16.15?
(Defina el integrando en cero como usted desee.)
16.18 Evalúe
nencial
correcta hasta en tres lugares utilizando la serie correspondiente a la función expo-
16.19 Calcule la integral del problema precedente ignorando la singularidad y aplicando las fórmulas de Simpson
y de Gauss. ¿Convergen los resultados hacia el valor calculado en el problema 16.18? (Defina el integran­
do en cero como usted desee.)
16.20 Utilice series para demostrar que
16.21 Compruebe que hasta cuatro lugares
16.22 Compruebe que hasta cuatro lugares
16.23 Compruebe que hasta cuatro lugares
16.24 Compruebe que hasta cuatro lugares
16.25 Compruebe que hasta cuatro lugares
16.26 Compruebe que hasta cuatro lugares
16.27 Si tenemos una recta d, y F(X) es una fuerza que actúa en el punto D, cuya posición es X, entonces el
trabajo realizado al mover D desde a hasta b, está dado por W = ∫ F (X) dx.
16.28 De acuerdó con la figura siguiente, sea D un punto sobre la superficie de la Tierra, la fuerza de gravedad
está dada por F (X) = k IX2, donde k es una constante. Sabemos que el radio de la Tierra es de 6436
kilómetros.
Obtenga el trabajo W necesario para lanzar un objeto que pesa 52 kilogramos desde la superficie al
infinito a lo largo de la trayectoria d. Observación: F (6436) - 52.
www.elsolucionario.org
CASOS ESPECIALES DE LA INTEGRACIÓN NUMÉRICA
249
16.29 De acuerdo con la figura que se encuentra a continuación, la fuerza en newtons con la que se repelen esos
dos electrones, es inversamente proporcional al cuadrado de la distancia que los separa en metros.
Asumiendo que un electrón se encuentra fijo en el punto C, obtenga el trabajo hecho cuando el otro
electrón es repelido desde un punto E que se encuentra a .01 metros de C, hasta el infinito a lo largo de la
trayectoria d.
Posición de los
dos electrones
www.elsolucionario.org
Sumas y series
17
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras la utilidad de representar números y funciones en forma de series
(Introducción).
2. Expresar con sus propias palabras la diferencia entre sucesión o secuencia y serie (Introducción,
Capítulo 1).
3. Aplicar el método de fracciones parciales para evaluar series telcscópicas (Introducción, Problemas
8.18,8.19,17.1 a 17.5).
4. Explicar con sus propias palabras en qué consiste el método telcscópico y practicarlo en problemas
de aplicación (Problemas 17.1 a 17.5,17.50 a 17.52).
5. Explicar con sus propias palabras en qué consiste el uso de series infinitas convergentes y
practicarlo utilizando el método que considere más adecuado en problemas de aplicación
(justificando su elección) (Problemas 17.6 a 17.9,17.34,17.55,17.64,17.73,17.79,17.80 a 17.83).
6. Explicar con sus propias palabras en qué consiste el método de Leibnitz para la aceleración de la
convergencia en las series y practicarlo en problemas de aplicación (Capítulo 11, Problemas 11.15,
17.10).
7. Explicar con sus propias palabras en qué consiste el método de transformación de Euler para la
aceleración de convergencia en las series y practicarlo en problemas de aplicación (Capítulo 11,
Problemas 11.15,17.11 a 17.13,17.57 a 17.63,17.84,17.85).
8. Explicar con sus propias palabras en qué consiste el método de comparación para la aceleración de
convergencia en las series y practicarlo en problemas de aplicación (Problemas 17.14 a 17.17,17.65
a 17.68).
9. Explicar con sus propias palabras la utilidad y la aplicación de los polinomios de Bernoulli
(Problemas 17.18 a 17.30,17.56,17.69 a 17.74).
10. Explicar con sus propias palabras la utilidad y la aplicación de la fórmula Euler-Maclaurin (Problemas
17.31 a 17.34,17.53 a 17.55,17.75 a 17.78).
11. Explicar con sus propias palabras la utilidad y la aplicación del producto infinito de Wallis,
(Problemas 17.35,17.36).
12. Explicar con sus propias palabras la utilidad y la aplicación de las series de Stirling, para factoriales
muy grandes (Problemas 17.37 a 17.39,17.86).
13. Explicar con sus propias palabras la utilidad y la aplicación de las series asintóticas (Problemas 17.40
a 17.49,17.87).
14. Estimar los errores de truncación y de redondeo en el uso de series infinitas convergentes y
practicarlo en problemas de aplicación (Problemas 17.6,17.7,17.9,17.10,17.15,17.49,17.64).
www.elsolucionario.org
SUMAS Y SERIES
251
APLICACIONES DE LAS SUMAS Y SERIES
Una vez más se introduce un capítulo de apoyo dentro de este libro; este tema nos va a servir como herramienta
en temas subsecuentes.
Como se ha mencionado en los capítulos anteriores, es muy frecuente en la realidad requerir representaciones aproximadas de funciones reales, por muy diversas causas, entre las cuales se encuentran: que
son difíciles o tediosas de manipular, tenemos pocos puntos conocidos, necesitamos mayor precisión, tenemos necesidad de derivar o integrar alguna función complicada, el error por redondeo o por truncamiento es
menor que el beneficio de cualquier tipo al emplear series, etcétera.
Una forma de representar funciones reales es mediante series conocidas, en las cuales se incluirán los
términos que se requieran de acuerdo al criterio de balance que debe existir dentro de los métodos numéricos y
que involucra factores relevantes tales como: conocer y controlar el error por truncamiento, minimizar el error
por redondeo y elegir la precisión y la exactitud adecuadas sin sacrificar tiempo de cómputo, ni los factores
mencionados anteriormente.
Las representaciones en seríes nos brindan grandes beneficios, pues adicionalmente nos ayudarán a formar nuestro criterio ingenieril y a tener la capacidad de decidir si para un determinado problema se requiere o
no del uso de equipo de cálculo o bien computacional y en caso de necesitarlo, nos dará una idea de las características del equipo, de los superlenguajes y en general de los recursos que podremos necesitar; para tomar las decisiones apropiadas al respecto de inversión en tiempo, en personal o en dinero.
Las sumas de términos empleando la notación sigma ∑ (sumatoria) nos brindan una herramienta adicional
cuando tenemos datos discretos (este tema se empezó a ver en el capítulo 5); asimismo al resolver algunos problemas nos percataremos de los errores por redondeo y de truncamiento, lo cual nos servirá en capítulos posteriores, por ejemplo cuando veamos Ajuste de curvas mediante mínimos cuadrados en el capítulo 21 y Sistemas de
ecuaciones lineales en el capítulo 26.
Otra aplicación importantísima de la sumas (sumatorias) y el cuidado que debemos tener con el error de redondeo se presentará cuando empleemos hojas de cálculo electrónicas, tales como Lotus 1, 2, 3, Simphony,
Jazz, etc.; aunque este tema no es propiamente de métodos numéricos, un buen ingeniero a menudo colabora en
grupos interdisciplinarios y muy probablemente esté a su cargo la revisión de fórmulas y la precisión de los datos y
de los resultados. Por último una aplicación importante es dentro de los modelos de análisis de varianza que se
emplean mucho en estadística, para ingeniería química, mecánica y en general para control estadístico de
procesos y para control de calidad.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica .
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas
Manejo de funciones discretas
Diferencias divididas finitas
Polinomios factoriales
www.elsolucionario.org
2
10
11
13
14
21
22
23
24
3
4
252
MÉTODOS NUMÉRICOS
Sumas (sumatorias)
5
Sumas y series
17
La fórmula de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equiespaciados
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica
Integración numérica
Integración gaussiana
Casos especiales en la integración numérica
Sistemas de ecuaciones lineales
Sistemas de ecuaciones lineales
Programación lineal
Solución de sistemas inconsistentes
Problemas con valores en la frontera
www.elsolucionario.org
6
7
8
9
12
13
14
15
16
26
27
28
29
SUMAS Y SERIES
253
REPRESENTACIÓN DE NÚMEROS Y FUNCIONES COMO SUMAS
La representación de números y funciones como sumas finitas o infinitas ha demostrado ser muy útil en las
matemáticas aplicadas. El análisis numérico explota tales representaciones de muchas maneras, entre las que se
incluyen las siguientes:
1.
El método telescópico hace posible reemplazar sumas largas por cortas, con una ventaja evidente para
la computadora. El ejemplo clásico es
en el cual puede observarse la idea central del método. Cada término se sustituye por una diferencia.
2.
Las series infinitas de rápida convergencia desempeñan uno de los papeles principales en el análisis
numérico. Son ejemplos típicos las series de las funciones seno y coseno. Cada serie de ese tipo corres­
ponde a un excelente algoritmo para generar aproximaciones para la función que se representa.
3.
Los métodos de aceleración se han desarrollado para series de convergencia más lenta. Si es necesario
utilizar demasiados términos para lograr la precisión deseada, entonces los redondeos y otros problemas
asociados con cálculos prolongados pueden impedir que se consiga dicha precisión. Los métodos de ace­
leración alteran el curso del cálculo, o en otras palabras, ellos cambian el algoritmo, con el fin de hacer
más corta toda la tarea.
La transformación de Euler es un método de aceleración utilizado con frecuencia. Esta transfor­
mación se obtuvo en un capitulo anterior. Reemplaza una serie determinada por otra que suele tener una
convergencia más rápida.
El método de comparación es otro artificio de aceleración. En esencia, es el mismo que el método
de eliminación de singularidades; la serie se parte en una similar, pero conocida, y en otra que converge
más rápidamente que la serie original.
Pueden idearse métodos especiales para acelerar las representaciones de series de ciertas fun­
ciones. Las funciones logaritmo y arctan se emplearán como ejemplos.
4.
Los polinomios de Bernoulli están dados por
con coeficientes B, determinados por
para k = 2,3, etc. Entre las propiedades de los polinomios de Bernoulli se incluyen las siguientes:
www.elsolucionario.org
254
MÉTODOS NUMÉRICOS
Los números de Bernoulli bi, están definidos por
para i = 1, 2, etc.
Las sumas de potencias enteras están relacionadas con los polinomios y números de Bernoulli.
Dos de tales relaciones son
5.
La fórmula de Euler-Maclaurin puede deducirse en forma cuidadosa y obtenerse una estimación del
error por medio del empleo de los polinomios de Bernoulli. Puede usarse como un método de aceleración.
La constante de Euler
puede evaluarse utilizando la fórmula de Euler-Maclaurin. Son suficientes seis términos para producir una
precisión casi de diez lugares decimales.
6.
El producto de Wallis para Π es
y se emplea para obtener la serie de Stirling para grandes factoriales, la cual toma la forma
siendo todavía las bi los números de Bernoulli. La aproximación factorial más simple
es el resultado de usar sólo un término de la serie de Stirling.
7.
Las series asintóticas pueden considerarse como otra forma de un método de aceleración. Aunque sue­
len diverger, sus sumas parciales tienen propiedades que las hacen útiles. La situación clásica implica su­
mas de la forma
que divergen para todo x cuando n tiende a infinito, pero tal que
www.elsolucionario.org
SUMAS Y SERIES
255
para x tendiendo a infinito. El error al utilizar Sn(x) como una aproximación a f(x) para grandes argumentos
x puede estimarse, entonces, con mucha facilidad, al buscar simplemente en el primer término omitido de
la serie. Esta misma idea general puede extenderse también a otros tipos de sumas.
La integración por partes convierte muchas integrales comunes en series asintóticas. Para el caso
de x grande, ésta puede ser la mejor forma de evaluar dichas integrales.
Problemas resueltos
EL MÉTODO TELESCÓPICO
17.1
Evalúe
Ésta es otra suma telescópica. Encontramos fácilmente
El método telescópico es, desde luego, la suma de diferencias, como se estudió en el capítulo 5. La
suma ∑ yi puede evaluarse con facilidad si es posible expresar yi como una diferencia, de manera que
17.2
Evalúe la suma de potencias
Puesto que las potencias pueden expresarse en términos de polinomios factoriales, los cuales pue­
den a su vez expresarse como diferencias (véase el capítulo 4), cualquiera de esas sumas de potencias
pueden hacerse telescópica. En el ejemplo presente
Otras sumas de potencias se tratan de manera similar.
17.3
Evalúe
Puesto que las sumas de potencias pueden evaluarse mediante sumas de diferencias, las sumas de
los valores de polinomios son dividendos fáciles. Por ejemplo,
www.elsolucionario.org
256
17.4
MÉTODOS NUMÉRICOS
Evalúe
Esta expresión puede escribirse como una suma de diferencias. Recordando los polinomios factoriales con exponente negativo, del capítulo 4, encontramos
y de ahí si-
gue que la suma dada se aproxima a
En este ejemplo la serie infinita es convergente y
17.5
Evalúe
Las funciones racionales de este tipo (y las del problema 17.4) se suman con facilidad. Aquí
La serie infinita converge a
SERIES RÁPIDAMENTE CONVERGENTES
17.6
¿Cuántos términos de la serie de Taylor para el sen x en potencias de x se necesitan para brindar una
precisión de ocho lugares para todos los puntos entre 0 y π/2?
Puesto que la serie
es alternante con términos que decrecen en forma
uniforme, el error de truncamiento que se produce al usar sólo n términos no excederá el término (n + 1).
Esta importante propiedad de tales series hace que resulte relativamente fácil la estimación del error de
truncamiento. Aquí encontramos (π2)15/15! ≈ 8 . 10 = -10 de modo que los siete términos de la serie seno son
adecuados para una precisión de ocho lugares en todo el intervalo.
Éste es un ejemplo de una serie que converge rápidamente. Puesto que otros argumentos pueden
manejarse mediante el rasgo de periodicidad de esta función, se cubren todos los argumentos. Nótese, sin
embargo, que es posible una pérdida seria de dígitos significativos en la reducción del argumento. Por
ejemplo, con x ≈ 31.4 encontramos
sen x ≈ sen 31.4 ≈ sen (31.4 ≈ 10 π) ≈ sen (31.4 ≈ 31.416) = sen (-.016) ≈ -.016
De la misma manera sen 31.3 ≈ -.116, en tanto que, sen 31.5 ≈ .084. Esto significa que a pesar de que el
dato de entrada 31.4 se conoce hasta en tres cifras significativas, la salida no es verdadera ni en una cifra
significativa. Es esencialmente el número de dígitos a la derecha del punto decimal en el argumento x, lo
que determina la precisión que puede obtenerse en sen x.
17.7
¿Cuántos términos de la serie de Taylor para ex, en potencias de x, se necesitan para brindar una precisión
de ocho lugares para todos los argumentos entre 0 y 1 ?
La serie es la familiar
Puesto que ésta no es una serie alternante, el error de truncamiento
www.elsolucionario.org
SUMAS Y SERIES
257
puede no ser menor que el primer término omitido. Aquí recurrimos a una sencilla prueba comparativa. Su­
póngase que truncamos la serie después del término xn. Entonces el error es
y puesto que x < 1 este error no excederá
de modo que apenas excede el primer término omitido. Para n = 11 esta cota del error se convierte aproxi­
madamente en 2 . 10 -9, lo que indica un polinomio de grado once. Por ejemplo, en x = 1 los términos suce­
sivos son como sigue:
1.00000000
.50000000
.04166667
.00138889
.00002480
.00000028
1.00000000
.16666667
.00833333
.00019841
.00000276
.00000003
y su total es 2.71828184. Esto es incorrecto en el último lugar por una unidad debido a los errores de redon­
deo. El error también puede estimarse utilizando la forma de Lagrange (problema 11.4), la cual produce
17.8
Calcule e -10 hasta en seis dígitos significativos.
Este problema ejemplifica una importante diferencia. Para el caso de seis lugares podríamos proceder
como en el problema 17.7, con x= -10. Sin embargo, la serie convergería muy lentamente y se presenta un
problema de otro tipo. Al obtener este pequeño número como una diferencia de números mayores perde­
mos dígitos. Trabajando hasta ocho lugares obtendríamos e-10 ≈ .00004540 que sólo tiene cuatro dígitos
significativos. Tal pérdida es frecuente con las series alternantes. En algunas ocasiones la aritmética de do­
ble precisión (trabajando con el doble de lugares) supera el problema. Aquí, sin embargo, calculamos sim­
plemente e10 y después obtenemos el recíproco. El resultado es e-10 ≈ .0000453999 que es correcto hasta
el último dígito.
17.9
mediante el método de la serie de Taylor para
En el problema 14.34 se calculó la integral
x = 1. Suponga que la serie se utiliza para una x más grande, pero, para evitar el crecimiento del error de
redondeo, no se sumarán más de veinte términos. ¿Qué tan grande puede hacerse x, para conservar una
precisión de cuatro lugares?
sin considerar el signo. Puesto
El n-ésimo término de la serie integrada es
que esta serie se alterna con términos que decrecen uniformemente, el error de truncamiento no excederá
al primer término omitido.
Ütilizando veinte términos requerimos que
Esto conduce a x < 2.5 aproximadamente. Para tales argumentos la serie converge lo bastante rápido como para cumplir con nuestros
requerimientos. Eso no ocurre en el caso de argumentos más grandes.
www.elsolucionario.org
258
MÉTODOS NUMÉRICOS
MÉTODOS DE ACELERACIÓN
17.10 No todas las series convergen tan rápidamente como las de los problemas anteriores. A partir de la serie
del binomio
se encuentra integrando entre 0 y x que
En x - 1 esto produce la serie de Leibnitz
¿Cuántos términos de esta serie serían necesarios para obtener una precisión de cuatro lugares?
Puesto que la serie es alternante con términos que decrecen uniformemente, el error de truncamiento
no puede exceder al primer término omitido. Si este término es .00005 o un valor menor, debemos utilizar
términos próximos a 1/20 000. Lo cual equivale a 10 000 términos. Al sumar un número tan grande de tér­
minos es posible esperar que los errores de redondeo acumulen hasta 100 veces el redondeo individual
máximo. Pero la acumulación podría crecer hasta 10 000 veces ese máximo si fuéramos increíblemente de­
safortunados. En ningún caso esta serie conduce a un algoritmo aceptable para el cálculo de π/4.
17.11 Aplique la transformación de Euler del capítulo 11 a la serie del problema precedente para obtener una
precisión de cuatro lugares.
El mejor procedimiento consiste en sumar los primeros términos y aplicar la transformación al resto.
Por ejemplo, hasta en cinco lugares,
Algunos de los siguientes recíprocos y sus diferencias son:
La transformación de Euler es
www.elsolucionario.org
SUMAS Y SERIES
259
que aplicada a nuestra tabla produce
.02381 + .00104 + .00008 + .00001 = .02494
Por último tenemos
que es correcto hasta en cinco lugares. En total, han participado 15 términos de la serie original, en vez de
10 000.
La transformación de Euler produce a menudo una excelente aceleración como en este caso, pero
también puede fallar.
17.12 Calcule Π/4 a partir de la fórmula.
correcta hasta en cuatro dígitos.
Aquí se ilustra cómo pueden utilizarse las propiedades especiales de la función implicada para gene­
rar convergencia acelerada. La serie
converge rápidamente para los argumentos que se consideran ahora. Nos encontramos utilizando sólo cin­
co términos de la serie:
con un total de .78539815. El último dígito debe ser un 6.
17.13 ¿Cuántos términos de
se necesitarían para evaluar la serie correcta hasta tres lugares?
Los términos que empiezan con i = 45 son todos más pequeños que .0005, por lo que ninguno de
ellos afecta en forma individual al tercer lugar decimal. Sin embargo, como todos los términos son positivos,
es claro que colectivamente ios términos de i = 45 hacia adelante afectarán al tercer lugar, incluso tal vez al
segundo. Stegun y Abramowitz (Journal of SIAM, 1956) mostraron que 5745 términos son en realidad re­
queridos para una precisión de tres lugares. Éste es un buen ejemplo de una serie de términos positivos
que converge lentamente.
17.14 Evalúe la serie del problema 17.13 mediante el "método de comparación", con una corrección de tres
lugares. (Este método es análogo a la evaluación de integrales singulares por medio de la eliminación de la
singularidad.)
www.elsolucionario.org
260
MÉTODOS NUMÉRICOS
El método de comparación implica la introducción de una serie conocida con la misma velocidad de
convergencia. Por ejemplo,
Demostraremos después que la primera serie a la derecha es π2/6. La segunda converge en forma más rá­
pida que las otras, y encontramos
donde sólo diez términos se utilizan. La sustracción de Π 2 /6 ≈ 1.64493 da el resultado final de 1.07695, que
puede redondearse a 1.077.
17.15 Compruebe que el resultado obtenido en el problema 17.14 es correcto al menos hasta en tres lugares.
El error de truncamiento de nuestro cálculo de la serie es
Se probará después que la primera de la derecha es π4/90, y que la segunda corresponde a menos de
1.08200. Esto hace que E < 1.08234 - 1.08200 = .00034. Los errores de redondeo no pueden ser mayores
que 11 . 5 . 10-6, ya que se han sumado 11 números con una precisión de cinco lugares. Por tanto, el error
combinado no excede .0004, haciendo que nuestro resultado sea correcto hasta en tres lugares.
17.16 Aplique el método de comparación a
Esta serie se sumó directamente en el problema anterior. Sin embargo, para ilustrar cómo puede vol­
verse a aplicar el método de la comparación, nótese que
La evaluación directa de la última serie lleva a
.51403. Restando de π4/90 encontramos
que concuerda bastante bien con los resultados de los dos problemas anteriores, en los cuales se calculó la
misma suma, determinándose el valor de .56798 con un error estimado de .00034. La estimación del error
fue casi perfecta.
17.17 Evalúe
hasta cuatro lugares.
www.elsolucionario.org
SUMAS Y SERIES
261
Por desgracia la serie converge en forma demasiado lenta. Aplicando el método de comparación.
La primera serie a la derecha es telescópica y se encontró en el problema 17.4 que era exactamente igual
a 1/4. La última puede sumarse en forma directa,
.120213 lo cual es correcto hasta en
y llega a .04787. Restando de 1.25, tenemos finalmente
cuatro lugares. Véase el problema 17.39 para un resultado más preciso.
LOS POLINOMIOS DE BERNOULLI
17.18 Los polinomios de Bernoulli Bi (x) se definen mediante
Deje Bi(0) - Bi y desarrolle una fórmula de recurrencia para estos números Bi.
Sustituyendo x por 0, tenemos
con ck
Esto hace
. Comparando los coeficientes de t en la ecuación dé las
series anteriores, encontramos que
para k = 2, 3 , . . .
B0 = l
Escritas por separado, este conjunto de ecuaciones muestra cómo pueden determinarse las Bi, una por una
sin dificultad:
B0 + 2B1 = 0
B0+ 3B1 + 3B2 = 0
B0 + 4B1 + 6B2 + 4B3 = 0
etc. Las primeras Bi son entonces
www.elsolucionario.org
262
MÉTODOS NUMÉRICOS
y así sucesivamente. El conjunto de ecuaciones utilizado puede además describirse en la forma
(B + 1)k - Bk = 0
para k = 2, 3,. . .
donde se entiende que después de aplicar el teorema del binomio cada "potencia" Bi se sustituye por B¡.
17.19 Encuentre una fórmula explícita para los polinomios de Bernoulli.
De la ecuación de definición y del caso especial x = 0 tratado arriba,
Comparando los coeficientes de tk en ambos lados se obtiene
Los primeros polinomios de Bernoulli son
etc. La fórmula puede resumirse como Bk (x) = (x + B)k, donde también se entiende que se ha aplicado el
teorema del binomio y que después se ha sustituido cada "potencia" B' por Bi.
17.20 Demuestre que B'i(x) = iBi -1(x).
La ecuación de definición puede escribirse como
Diferenciando con respecto a x y dividiendo entre t,
Pero las ecuaciones de definición pueden escribirse también como
y comparando los coeficientes a la derecha, B'i(x) - iB¡-1(x) para i = 1, 2
Nótese además que el mis­
mo resultado puede obtenerse instantáneamente mediante la diferenciación formal de Bi(x) = (x + B)'.
www.elsolucionario.org
SUMAS Y SERIES
263
17.21 Demuestre que
Procediendo formalmente (aun cuando una demostración más rigurosa no sería difícil partiendo de (B
k
+ 1) = Bk, encontramos
A partir de la fórmula abreviada para los polinomios de Bernoulli (problema 17.19), esto se convierte inme­
diatamente en
17.22 Demuestre que Bi (1) = Bi (0) para i > 1.
Esto se obtiene de inmediato partiendo del problema anterior con x sustituida por cero.
17.23 Pruebe que
= 0 para i = 1, 2 , . . .
Por los problemas anteriores
17.24 Las condiciones de los problemas 17.20 y 17.23 determinan también los polinomios de Bernoulli, dado B0(x)
= 1. Determine en esta forma B1(x) y B2(x).
De B'1(x) = B0(x) resulta que Bi(x) = x + C1 donde C1 es una constante. Para que la integral de Bi (x)
sea cero, C1 debe ser - 1/2. Entonces de B'2(x) = 2B1(x) = 2x - 1 se deduce que B2(x) = x2 - x + C2. Para
que la integral de B2(x) sea cero, la constante C2 debe ser 1/6. En esta forma cada Bi(x) puede determinarse
en su momento.
.
17.25 Pruebe que B2i-1 = 0 para i = 2, 3 , . . .
Nótese que
es una función par, esto es, f(t) = f(-t). Todas las potencias impares de t deben tener coeficientes cero, ha­
ciendo Bi cero para i impar, excepto i =1.
17.26 Defina los números de Bernoulli bi.
Éstos se definen como bi = (- 1)i +1 B2 para i = 1, 2 , . . . Entonces
www.elsolucionario.org
264
MÉTODOS NUMÉRICOS
como puede comprobarse fácilmente después de calcular los números correspondientes Bi mediante la
fórmula de recurrencia del problema 17.18.
17.27 Evalúe la suma de las p-ésimas potencias de x en términos de los polinomios de Bernoulli.
Puesto que, por el problema 17.21, ∆Bi(x) = Bi(x + 1 ) - B i ( x ) = ixi-1 los polinomios de Bernoulli
proporcionan integrales finitas de las funciones potencia. Lo cual permite hacer telescópica la suma de po­
tencias.
17.28 Evalúe las sumas de la forma
en términos de los números de Bernoulli.
Se demostrará más adelante (véase el capítulo sobre la aproximación trigonométrica) que la función
Fn(x) = Bn(x)
0≤x<l
Fn(x ±m) = Fn(x) para m un entero
conocida como una función de Bernoulli, que tiene periodo 1, puede representarse como
para n par, y como
cuando n es impar. Para n par, digamos n = 2i, dejamos x = 0 y tenemos
En particular
17.29 Demuestre que todos los números de Bernoulli son positivos y que se vuelven arbitrariamente grandes
cuando / aumenta.
Notando que 1
vemos que
En particular todas las bi son positivas y aumentan en forma ilimitada con el aumento de i.
www.elsolucionario.org
SUMAS Y SERIES
265
17.30 Demuestre que cuando i se incrementa, lim
Esto también se desprende rápidamente de la serie del problema 17.28. Todos los términos, excepto
el k = 1, se aproximan a cero para i creciente, y como i/xp es una función decreciente de x,
de modo que, si p > 1,
Cuando p aumenta (en nuestro caso p = 2i) esta serie tiene límite cero, lo cual establece el resultado reque­
rido. Puesto que todos los términos de esta serie son positivos, resulta también que bi > 2(2i)! I(2π)2i.
LA FÓRMULA DE EULER-MACLAURIN
17.31 Emplee los polinomios de Bernoulli para obtener la fórmula de Euler-Maclaurin con una estimación del
error. (Esta fórmula se obtuvo en el capítulo 11 mediante la aplicación de operadores pero sin una
estimación del error.)
Empezamos con una integración por partes, empleando los hechos de que Bi'(t) = B0(t) = 1 y B1 (1) =
B1(0) = 1/2.
Vuélvase a integrar por partes empleando B2'(t) = 2B1(t) del problema 17.20 y B2(1) = B2(0) = b1 para encon­
trar
La siguiente integración por partes produce
Pero como B3(1) = B3(0) = 0, el término integrado se hace cero y procedemos a
ya que B4(1) - B4(0) = B4 = -b 2 . Continuando en esta forma, desarrollamos el resultado
www.elsolucionario.org
266
MÉTODOS NUMÉRICOS
donde
Integrando Rk por partes, la parte integrada otra vez es cero, dando como resultado
Se mantienen resultados correspondientes para intervalos entre otros enteros consecutivos. Sumando, en­
contramos una simplificación sustancial y obtenemos
con un error de
donde F2k (t) es la función de Bernoulli del problema 17.28, la extensión periódica del polinomio de Bernoulli
B2k(t). El mismo argumento puede utilizarse entre argumentos enteros a y b en vez de 0 y n. También es po­
sible dejar que b se vuelva infinito, siempre que la serie y la integral que encontremos sean convergentes.
En este caso, suponemos que y(t) y sus derivadas se vuelven cero en el infinito, por lo que la fórmula se
convierte en
17.32 Evalúe la suma de potencias
mediante el uso de la fórmula de Euler-Maclaurin.
En este caso la función y(t) = t4, de modo que con k = 2 termina la serie del problema anterior. Ade­
más, el error Ek se hace cero puesto que y(5)(f) es cero. El resultado es
como en el problema 17.2. Éste es un ejemplo en el cual la k creciente en la fórmula de Euler-Maclaurin
conduce a una suma finita. (El método del problema 17.27 podría también aplicarse a esta suma.)
17.33 Calcule la constante de Euler C =
(Véase también el problema 17.77.)
suponiendo que hay convergencia.
Utilizando el problema 17.1, esta expresión puede reescribirse como C = 1
La fórmula de Euler-Maclaurin puede aplicarse ahora con y(t) = 1/t - log t + log (t - 1). En realidad es
más conveniente sumar directamente los primeros términos y aplicar después la fórmula de Euler-Maclaurin
www.elsolucionario.org
SUMAS Y SERIES
267
al resto de la serie. Para ocho lugares,
Usando 10 y ∞ como límites, primero calculamos
proviniendo el primer término del límite superior mediante la evaluación de la "forma indeterminada". Luego
siendo cero todos los valores en infinito. Sumando los cinco términos que se acaban de calcular tene­
mos C ≈ .57721567. Llevando diez lugares y calculando sólo un término más se llegaría a la mejor aproxi­
mación C ≈ .5772156650, la cual es, en sí misma, una unidad demasiado grande en el décimo lugar.
En este ejemplo la precisión obtenida mediante la fórmula de Euler-Maclaurin es limitada. Después de
cierto punto, la utilización de más términos (incremento de k) lleva a aproximaciones más pobres en lugar
de mejores, para la constante de Euler. En otras palabras, hemos empleado unos cuantos términos de una
serie divergente para obtener nuestros resultados. Para ver esto solamente necesitamos notar que el i-ésimo término de la serie es
y que por el problema 17.29 la bi excede 2(2/)! /(2π)2i,
lo cual asegura el crecimiento ilimitado de este término. La divergencia es más común que la convergencia
para la serie de Euler-Maclaurin.
17.34 Un camión puede recorrer una distancia de un "tramo" con la carga máxima de combustible que puede
transportar. Muestre que si se dispone de un suministro ilimitado de combustible al borde de un desierto, el
camión podría cruzarlo sin importar cuál sea el ancho de éste. Estime cuánto combustible sería necesario
para cruzar un desierto de 10 "tramos" de ancho.
Con una sola carga de combustible el camión podría cruzar un desierto de un tramo de ancho. Con
dos cargas disponibles podría seguirse esta estrategia: cargado al máximo, el camión avanza una distan­
cia de un tercio de tramo. La tercera parte de la carga de combustible se deja en un escondite y el camión
regresa al depósito de combustible justo cuando su combustible se ha terminado. Con la segunda carga el ca­
mión se dirige hacia el escondite, donde vuelve a llenar su tanque de combustible. Con el tanque lleno el
camión puede avanzar un tramo más, cruzando de esa manera un tramo de desierto de (1 + 1/3), como se
muestra en la figura 17-1. Con tres cargas de combustible disponibles en el depósito puede efectuar dos
viajes para establecer un escondite de § de carga a una distancia de 1/5 de tramo dentro del desierto. La ter-
Fig. 17-1
Fig. 17-2
www.elsolucionario.org
268
MÉTODOS NUMÉRICOS
cera carga lleva, entonces, al camión al escondite con
gia anterior es posible, entonces, una jornada de
de cargas disponibles. Repitiendo la estratetramos, como se indica en la figura 17-2.
Una estrategia similar permite cruzar un desierto de ancho
usando n car-
gas de combustible. Puesto que esta suma crece arbitrariamente cuando n se incrementa, puede cruzarse
un desierto de cualquier ancho si se dispone de suficiente combustible en el depósito.
Para estimar cuánto combustible es necesario para cruzar un desierto de diez tramos de ancho, escri­
bimos
y aplicamos la aproximación del problema 17.33:
Esto asciende a diez para n igual a casi 100 millones de cargas de combustible.
PRODUCTO INFINITO DE WALLIS
17.35 Obtenga el producto de Wallis para n.
Las aplicaciones repetidas de la fórmula de recurrencia
disponible en tablas de integrales, produce sin dificultades los resultados
Evaluando las integrales restantes y dividiendo un resultado entre el otro,
El cociente de las dos integrales converge a 1 cuando k aumenta. Esto puede probarse del modo siguiente.
Puesto que 0 < sen x < 1,
www.elsolucionario.org
SUMAS Y SERIES
269
Dividiendo entre la primera integral y utilizando la fórmula de recurrencia original.
por lo que el cociente tiene límite 1. Por consiguiente,
lo cual es el producto infinito de Wallis.
17.36 Obtenga el producto infinito de Wallis para
Puesto que lím 2k/(2k + 1) = 1, el resultado del problema anterior puede escribirse como
Tomando la raíz cuadrada y multiplicando numerador y denominador del cociente por los factores necesa­
rios para completar el factorial del denominador, tenemos
de donde el producto de Wallis resulta de inmediato en la forma
Este resultado será necesario en el siguiente problema.
LA SERIE DE STIRLING PARA GRANDES FACTORIALES
17.37 Deduzca la serie de Stirling para grandes factoriales.
En la fórmula de Euler-Maclaurin sea y(t) = log t y utilice los límites 1 y n. Entonces
Esto puede acomodarse como
donde
www.elsolucionario.org
270
MÉTODOS NUMÉRICOS
Para evaluar c deje que n ‒>∞ en la ecuación anterior. La suma infinita tiene límite cero. La integral, ya que
F2k+1 es periódica y, por tanto, acotada, se comporta como 1/n2k y por eso también tiene límite cero. De tal
modo
Después de lo cual puede evaluarse este límite mediante un simple artificio. Puesto que
encontramos
por el producto de Wallis para √π. En consecuencia c = log /√2π. Nuestro resultado puede escribirse ahora
como la serie de Stirling
siendo el error
Para valores grandes de n esto significa que el logaritmo es casi
cero, haciendo
17.38 Aproxime 20! por medio de la serie de Stirling.
Para n - 20 la serie resulta
no se utiliza. Tenemos ahora
hasta cinco lugares, donde sólo un térmi-
Este valor es correcto casi hasta en cinco dígitos. Podrían emplearse más términos de la serie de Stirling
para una precisión aún mayor, pero es importante darse cuenta que esta serie no es convergente. Cuando
k se incrementa más allá de cierto punto, para n fija, los términos aumentan y el error E se hace más gran­
de. Esto proviene del hecho de que (véase el problema 17.29) bk > 2(2k)! /(2π)2k. Como se probará en bre­
ve, la serie de Stirling es un ejemplo de una serie asintótica.
17.39 Calcule
hasta siete lugares.
Sume directamente los primeros nueve términos para encontrar
1/t3 la fórmula de Euler-Maclaurín implica en estas condiciones
y el total es 1.2020569. Este mejora el resultado del problema 17.17.
www.elsolucionario.org
= 1.19653199 Con f(t)-
SUMAS Y SERIES
271
SERIES ASINTÓTICAS
17.40 Defina una serie asintótica.
Sea Sn (x)
para cualquier entero positivo fijo n, en-
tonces que f (x) será asintótica para
en cero. Esto se representa mediante el símbolo
Con x reemplazada por x - x0 se aplica la misma definición, siendo la serie asintótica a f (x) en x0.
Quizá el caso más útil de todos es el desarrollo asintótico al infinito. Si para x −>∞,
donde ahora
tiene entonces una serie asintótica al infinito, escribimos
La idea puede generalizarse aún más. Si, por ejemplo,
afirmamos también que f(x) tiene la siguiente representación asintótica:
Observe que no se está suponiendo que alguna de estas seríes converja.
17.41 Obtenga una serie asintótica para
La integración sucesiva por partes produce
y así sucesivamente. A la larga se encuentra
donde
Puesto que
tenemos
www.elsolucionario.org
272
MÉTODOS NUMÉRICOS
17
por lo que cuando x −>∞ esto tiene límite cero. Lo cual hace que ex f(x) sea asintótica a la serie y por nues­
tra definición generalizada
Observe que la serie diverge para todo valor de x.
17.42 Demuestre que el error de truncamiento comprendido al utilizar la serie del problema precedente no excede
al primer término omitido.
El error de truncamiento es precisamente Rn. El primer término omitido es
es idéntico a la estimación de Rn en el problema 17.41.
el cual
17.43 Utilice la serie asintótica del problema 17.41 para calcular f(5).
Encontramos
después de la cual aumentan los términos. Puesto que el error no excede el primer término que omitimos,
sólo es necesario usar cuatro términos, con el resultado
donde el último término es incierto. El punto es que la serie no puede producir f (5) con una precisión mayor
que ésta. En el caso de valores de x más grandes mejora la precisión alcanzable de manera sustancial pe­
ro sigue siendo limitada.
17.44 Emplee la serie del problema 17.41 para calcular f(10).
Encontramos, llevando seis lugares.
después de lo cual aumentan los términos. Sumando los primeros nueve términos, tenemos
con el último dígito incierto. En el problema anterior se alcanzaron dos lugares de precisión. Aquí hemos
manejado cuatro. La idea esencial de las series asintóticas es que para valores crecientes de x, el error
tiende a cero.
17.45 Demuestre que la serie de Stirling es asintótica.
Con n desempeñando el papel de f(x) y el logaritmo el papel de f(x) (véase el problema 17.37), debe­
mos demostrar que
www.elsolucionario.org
SUMAS Y SERIES
273
Puesto que F2k+t(t) se repite, con período 1, el comportamiento de B2k+1(t) en el intervalo (0,1) está acota­
do, digamos | F | < M. Por tanto,
y con n creciente esto se vuelve arbitrariamente pequeño.
17.46 Encuentre una serie asintótica para
El método de integraciones sucesivas por partes es otra vez útil. Primero
y continuando de esta manera encontramos
donde
El residuo puede escribirse como
Puesto que ambos resultados son positivos, se sigue que
Con esto se loara un doble propósito. Se demuestra que el error de truncamiento no excede al primer término omitido. Y como hace también que el lím
demuestra la serie asintótica.
17.47 Calcule
mediante la serie del problema 17.46.
Con x = 4 encontramos
hasta el punto en el que los términos empiezan a aumentar. El resultado correspondiente al detenerse an­
tes del término más pequeño es
www.elsolucionario.org
274
MÉTODOS NUMÉRICOS
con el dígito 2 en duda. Esto concuerda bastante bien con nuestro resultado del problema 14.32. Los cálcu­
los independientes que confirman uno y otro resultados son muy tranquilizadores. Observe la diferencia de
método en estos dos problemas, y la simplicidad del cálculo presente.
17.48 Encuentre una serie asintótica para la integral del seno.
Otra vez demuestra ser útil la integración por partes. Primero
después de lo cual, pasos similares generan la serie
que como en los problemas anteriores puede probarse que es asintótica.
17.49 Calcule Si (10).
Dejando x = 10 en el problema anterior,
después de lo cual tanto los términos coseno como seno empiezan a ser más grandes. El total de estos
diez términos se redondea a -.0876, que es correcto hasta cuatro lugares.
Problemas suplementarios
17.50 Exprese como una suma de diferencias
y de ese modo evalúela.
17.51 Exprese como una suma de diferencias y de ese modo evalúe
17.52 Exprese como una suma de diferencias y de ese modo evalúe
17.53 Evalúe la suma en el problema 17.51 mediante la fórmula de Euler-Maclaurin.
17.54 Evalúe la suma en el problema 17.50 por medio de la fórmula de Euler-Maclaurin.
17.55 ¿Cuántos términos de la serie del coseno se necesitan para brindar una precisión de ocho lugares con
respecto a valores de 0 a π / 2?
www.elsolucionario.org
SUMAS Y SERIES
275
17.56 Muestre que
donde las Bi son números de Bernoulli. Aplique este resultado a la serie de Leibnitz en π/4 para obtener el
resultado de seis lugares .785398.
17.57 Aplique la transformación de Euler para evaluar
hasta cuatro lugares.
17.58 Emplee la transformación de Euler para evaluar
resultado .91596559.
hasta ocho lugares, confirmando el
hasta en cuatro lugares es
17.59 Utilice la transformación de Euler para mostrar que
igual a .0757.
17.60 Aplique la transformación de Euler a log
17.61 ¿Qué tan grande debe ser x para que 20 términos de la serie
produzcan una precisión de cuatro lugares?
17.62 ¿Cuántos términos de la serie del cos
se necesitan para garantizar una precisión
de hasta ocho lugares en el intervalo de 0 a π/2?
17.63 ¿Qué tan grande debe sen x para que 20 términos de la serie
produzcan una precisión de seis lugares?
17.64 Para la serie senh
estime el error de truncamiento en términos del primer término
omitido. (Véase el problema 17.7 para un posible método.) ¿Para qué tamaño de x bastarán 20 términos
para una precisión de ocho lugares?
17.65 Aplique el método de comparación del problema 17.14 para calcular
como la serie de comparación.]
www.elsolucionario.org
hasta tres lugares.
276
MÉTODOS NUMÉRICOS
17.66 Calcule
hasta tres lugares mediante el método de comparación empleando el resultado del pro
blema 17.17.
17.67 Calcule
17.68 Calcule
hasta tres lugares mediante el método de comparación.
hasta tres lugares mediante el método de comparación.
17.69 Determine los primeros diez números o, a partir de la recurrencia del problema 17.18
17.70 Calcule los valores de B6(x) hasta B10(x) partiendo de la fórmula del problema 17.19.
17.71 Demuestre que
17.72 Determine B3(x) y B4(x) como en el problema 17.24.
17.73 ¿Cuáles polinomios se determinan mediante las condiciones
Q'i(x) =
iQi-1(x)
Qi(0) = 0
empezando con Q0 (x) = 1 ?
17.74 Emplee el resultado del problema 17.28 para evaluar
para p = 6, 8 y 10, comparando los resultados
17.75 Utilice la fórmula de Euler-Maclaurin para probar que
Compare con el problema 17.3.
17.76 Emplee la fórmula de Euler-Maclaurin para evaluar
17.77 Utilice la fórmula de Euler-Maclaurin para mostrar que
donde C es la constante de Euler y F1 (t) es la extensión periódica de B (t). Esto demuestra la convergen­
cia de Sn y permite también la estimación de la diferencia entre sn y C para n grande.
17.78 Aplicando la fórmula de Euler-Maclaurin, muestre que
+ término de error
y utilice este resultado para evaluar la constante de Euler. Muestre que cuando k aumenta, la suma a la de­
recha se vuelve una serie divergente. ¿En qué punto los términos de esta serie empiezan a incrementarse?
www.elsolucionario.org
SUMAS Y SERIES
277
17.79 Haciendo referencia al problema 17.34, demuestre que un desierto con un ancho de cinco tramos requiere
más de 3000 cargas de combustible.
17.80 Calcule
hasta seis lugares.
17.81 Calcule
hasta tres lugares.
17.82 Evalúe exactamente
17.83 Evalúe la suma del problema 17.81 exactamente.
17.84 Muestre que la transformación de Euler convierte
en una serie que converge con mayor rapidez.
17.85 Muestre que la transformación de Euler convierte
en una serie que converge con mayor rapidez.
17.86 ¿Con qué precisión la serie de Stirling produce 2! y en qué punto los términos de la serié comienzan a in­
crementarse?
17.87 Obtenga la serie asintótica
y utilícela cuando x = 10, obteniendo la mayor precisión posible.
www.elsolucionario.org
Ecuaciones en diferencias
18
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el significado y la utilidad de las ecuaciones en diferencias
(Introducción).
2. Expresar con sus propias palabras las semejanzas y las diferencias entre ecuaciones en diferencias y
ecuaciones diferenciales (Introducción).
3. Aplicar fórmulas de recurrencia para encontrar soluciones a las ecuaciones de primer orden
presentadas (Introducción y Problemas 18.1 a 18.7,18.31 a 18.37).
4. Mostrar algebraicamente la similitud de la función digamma con la función logaritmo; mostrar la
utilidad que tiene la primera dentro de las ecuaciones en diferencias y practicar el concepto en
problemas de aplicación (Introducción y Problemas 18.8 a 18.14,18.38 a 18.45).
5. Explicar con sus propias palabras la utilidad y la aplicación de las ecuaciones lineales homogéneas
de segundo orden y practicar el concepto en problemas de aplicación (Problemas 18.15 a 18.26,
18.46 a 18.60).
6. Explicar con sus propias palabras la utilidad y la aplicación de las ecuaciones lineales no
homogéneas de segundo orden y practicar el concepto en problemas de aplicación (Problemas
18.27 a 18.30,18.61 a 18.65)
APLICACIONES DE LAS ECUACIONES EN DIFERENCIAS
Una vez más se introduce un capítulo de apoyo dentro de este libro; este tema nos va a servir como herramienta
en los dos temas subsecuentes, que tratan de ecuaciones diferenciales.
Una ecuación en la que aparece una función dcsconocida y, evaluada en dos o más puntos x, se llama
ecuación en diferencias; algunos autores las llaman ecuaciones de traslación. En los capítulos de raíces de
ecuaciones y ceros de polinomios, emplearemos estos conceptos y a las ecuaciones cscritas en las que daremos un valor inicial y a partir de éste obtendremos otro y así sucesivamente, las llamaremos expresiones de iteración.
En este capítulo veremos que existe una teoría y un desarrollo para las ecuaciones en diferencias, equiparable al estilo en el tratamiento tradicional de las ecuaciones diferenciales; de la misma manera las ecuaciones en diferencias tienen gran relación con las transformadas de Laplace que constituyen un instrumento fácil y
efectivo para la solución de problemas en ciencias e ingeniería.
www.elsolucionario.org
18
18
ECUACIONES EN DIFERENCIAS
279
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Análisis numérico
Manejo de ecuaciones
Ecuaciones en diferencias
Ecuaciones diferenciales
Ecuaciones diferenciales de órdenes superiores
Álgebra no lineal y optimización
Raíces de ecuaciones
Ceros de polinomios
www.elsolucionario.org
1
18
19
20
25
25
280
MÉTODOS NUMÉRICOS
DEFINICIONES
Podría esperarse que el término ecuación en diferencias correspondiera a una ecuación que incluyera diferencias.
Sin embargo, un ejemplo tal como
que se anula rápidamente en yk+2 = 0, muestra que no siempre son convenientes las combinaciones de diferencias, e incluso pueden ocultar información. Como resultado, las ecuaciones en diferencias suelen cscribirse directamente en términos de los valores yk. Como ejemplo considérese
donde ak y bk son funciones dadas del argumento entero k. Esto podría recscribirse como ∆yk = (ak - 1 )yk + bk pero
por lo general se encuentra que no es útil. En resumen, una ecuación en diferencias es una relación entre los valores yk de una función definida en un conjunto discreto de argumentos xk. Suponiendo argumentos igualmente espaciados, el cambio usual de argumento xk =x0 + kh nos lleva a un valor entero k.
Una solución de una ecuación en diferencias será una sucesión de valores yk para los cuales la ecuación
se cumple, para un conjunto de enteros k consecutivos. La naturaleza de una ecuación de diferencias permite que
las sucesiones de soluciones se calculen en forma recursiva. En el ejemplo anterior, por mencionar un caso, yk+1
puede calcularse con mucha facilidad si se conoce y*. Un valor conocido dispara, por consiguiente, el cálculo de
toda la sucesión.
El orden de una ecuación en diferencias es la diferencia entre los valores k más grande y más pequeño
que aparecen en ella. El último ejemplo previo es de primer orden.
ANALOGÍA CON ECUACIONES DIFERENCIALES
Existe una fuerte analogía entre la teoría de ecuaciones en diferencias y la teoría de las ecuaciones diferenciales. Por ejemplo, una ecuación de primer orden tiene por lo regular exactamente una solución que satisface la
condición inicial y0 =A. Y es común que una ecuación de segundo orden tenga exactamente una solución que satisfaga dos condiciones iniciales y0 =A, y1 =B. Se destacarán varios aspectos adicionales de esta analogía, a saber:
1.
Los procedimientos para encontrar soluciones son similares en los dos temas. Las ecuaciones lineales de primer orden se resuelven en términos de sumas, en tanto que las ecuaciones diferenciales correspondientes se resuelven en términos de integrales. Por ejemplo, la ecuación yk+1 = xyk + ck+1 con y0 = c0
tiene la solución polinomial
El cálculo de este polinomio en forma recursiva, a partir de la propia ecuación diferencial, se conoce como el
método de Horner para evaluar el polinomio. Es más económica que la evaluación estándar por potencias.
2.
La función digamma se define como
www.elsolucionario.org
ECUACIONES EN DIFERENCIAS
281
donde C es la constante de Euler. Es una forma de suma de la solución de la ecuación de diferencias de
primer orden.
Esto también le da el carácter de una integral finita de 1/(x + 1). Para valores enteros n, se observa que
Esta función desempeña un papel en el cálculo de diferencias un poco análogo al de la función logaritmo
en el cálculo diferencial. Compárense, por ejemplo, estas dos fórmulas:
Varias sumas pueden expresarse en términos de la función digamma y sus derivadas. El anterior es
un ejemplo. Otro es
que además prueba ser π2 /6.
La función gamma se relaciona con la función digamma por medio de
3.
La ecuación lineal homogénea de segundo orden
tiene la familia de soluciones
donde uk y vk son por si mismas soluciones y c1, c2 son constantes arbitrarias. Como en la teoría de ecua­
ciones diferenciales, esto recibe el nombre de principio de superposición. Cualquier solución de la
ecuación puede expresarse como tal superposición de uk y vk, mediante la elección apropiada de c1 y c2,
siempre que el wronskiano
4.
no sea cero.
El caso de coeficientes constantes, donde a1 y a2 son constantes, permite la fácil solución de uk y vk.
Con r1 y r2 las raices de la ecuación característica
www.elsolucionario.org
282
MÉTODOS NUMÉRICOS
estas soluciones son
La analogía con ecuaciones diferenciales es aparente. Los wronskianos de estos pares uk, vk no son cero,
y de ese modo, mediante la superposición, podemos obtener todas las soluciones posibles de la ecuación
diferencial.
Los números de Fibonacci son valores de solución de
y por el caso 1, anterior, puede representarse mediante funciones de potencias reales. Tienen algunas
aplicaciones en la teoría de la información.
5.
La ecuación no homogénea
tiene la familia de soluciones
donde uk,vk son como antes y yk es una solución de la ecuación dada. Esto es también análogo a un resul­
tado de las ecuaciones diferenciales. Para ciertas funciones elementales bk es posible deducir de manera
muy simple la solución correspondiente y*.
IMPORTANCIA DE LAS ECUACIONES EN DIFERENCIAS
Nuestro interés en las ecuaciones en diferencias es doble. En primer lugar, ellas ocurren en las aplicaciones.
Y, en segundo, numerosos métodos para la solución aproximada de ecuaciones diferenciales implican reempla­
zarlas por ecuaciones en diferencias como sustitutos.
Problemas resueltos
ECUACIONES DE PRIMER ORDEN
18.1
Resuelva la ecuación de primer orden yk+1 = kyk+ k2 en forma recursiva, dada la condición inicial y0 = 1.
Este problema ejemplifica el recurso de las ecuaciones en diferencia en los cálculos. Los valores su­
cesivos de yk se encuentran efectuando simplemente las adiciones y multiplicaciones indicadas,
y1=0
y2=1
y3=6
y4=27
y5=124
y así sucesivamente. Los problemas con valores iniciales de ecuaciones en diferencias pueden resolverse
siempre por medio de este sencillo modo recursivo. Sin embargo, con frecuencia se desea conocer el ca-
www.elsolucionario.org
ECUACIONES EN DIFERENCIAS
283
rácter de la función solución, haciendo una representación analítica de la solución que se desea. Sólo en
ciertos casos se ha encontrado tal representación.
18.2
Dadas las funciones ak y bk, ¿cuál es el carácter de la solución de la ecuación lineal de primer orden yk+1=
akyk + bk con la condición inicial y0 = A?
Procediendo como en el problema anterior, encontramos
etc. Con p„ denotando el producto pn = aoa1 ...an-1, se observa que el resultado indicado es
Éste podría verificarse formalmente mediante sustitución. Como en el caso de ecuaciones diferenciales de
primer orden, este resultado es satisfactorio sólo de modo parcial. Con ecuaciones diferenciales la solución
puede expresarse en términos de una integral. Aquí tenemos una suma. En ciertos casos, sin embargo, es
posible un avance adicional. Es importante notar que hay exactamente una solución que satisface la ecua­
ción en diferencias y asume el valor inicial preescrito y0= A.
18.3
¿Cuál es el carácter de la función solución en el caso especial ak =r, bk= 0?
Aquí el resultado del problema 18.2 se simplifica a la función potencia yn - Arn. Tales funciones de po­
tencias desempeñan también un papel importante en la solución de otras ecuaciones.
18.4
¿Cuál es el carácter de la función solución cuando ak = r y bk = 1, con y0 = A =1 ?
En este caso el resultado del problema 18.2 se simplifica a
18.5
¿Cuál es el carácter de la función solución de yk+1 = xyk + ck+1 con y0 = A = c0?
Este problema es una buena ilustración de cómo las funciones simples algunas veces se evalúan mejor
mediante procedimientos de ecuaciones en diferencias. Aquí el resultado del problema 18.2 se convierte en
La solución toma la forma de un polinomio. El método de Horner para evaluar este polinomio en el valor x
implica el cálculo sucesivo de y1y2 ,.....,yn. Esto equivale a n multiplicaciones y a n adiciones y a acomodar
el polinomio en la forma
Es más eficiente que construir las potencias de x una por una y realizar después la evaluación por medio de
la forma polinomial estándar.
www.elsolucionario.org
284
18.6
MÉTODOS NUMÉRICOS
18
¿Cuál es el carácter de la solución de
En este caso las pn del problema 18.2 se vuelven pn = n!/xn, en tanto que todas las bk = 1. Por consi­
guiente, la solución puede expresarse como
de modo que para n creciente,
18.7
¿Cuál es el carácter de la solución de
Aquí todas las bk del problema 18.2 son cero y A = 1, haciendo
Este producto se anula para x = ±1, +2, ,±n. Para n creciente encontramos el producto infinito
el cual puede demostrarse que representa a (sen πx)/πx).
LA FUNCIÓN DIGAMMA
18.8
El método de las sumas "telescópicas" depende de la posibilidad de expresar una suma como una suma de
/diferencias,
Esto es, requiere resolver la ecuación en diferencias de primer orden
Aplique este método cuando bk = 1/(k + 1), resolviendo la ecuación en diferencias y evaluando la suma.
Iniciamos definiendo la función digamma como
ler. Encontramos directamente para cualquier x ≠ - i.
donde C es la constante de Eu-
Cuando x toma valores enteros, digamos x = k, esta expresión brinda una nueva forma para la suma de re-
www.elsolucionario.org
ECUACIONES EN DIFERENCIAS
285
cíprocos de enteros, puesto que
Es posible además reescribir esto como
por lo que la función digamma para argumentos enteros es una cantidad familiar. Su comportamiento se
muestra en la figura 18-1, y el carácter logarítmico para x grande y positivo no sorprende cuando se recuer­
da la definición de la constante de Euler. En cierto sentido ψ(x) es una generalización a partir de ψ(n) en la
medida que la función gamma generaliza factoriales.
Fig. 18-1
18.9
Evalúe la suma
para t arbitrario.
Del problema 18.8, para cualquier
Reemplazando x por k + t - 1 para ob-
tener
Después de esto tenemos los ingredientes de una suma telescópica y encontramos
18.10 Evalúe la serie
en términos de la función digamma.
Empleando fracciones parciales, encontramos
www.elsolucionario.org
286
MÉTODOS NUMÉRICOS
18
Aplicando ahora el problema anterior, esto se convierte en
De la definición de la serie en el problema 18.8 resulta después de un breve cálculo que
de modo que para n −>∞ esta diferencia tiene límite cero. Por último,
18.11 Encuentre fórmulas para ψ'(x), ψ(2) (x), etc., en forma de series.
La diferencia de la serie del problema 18.8 produce
uniformemente en x sobre cualquier intervalo que no incluya un entero negativo, la computación es válida.
Repitiendo,
En particular, para argumentos enteros, el problema 17.28 hace
perdemos un término a la vez para obtener
después del cual
y en general
18.12 Evalúe la serie
Este caso ilustra de modo adicional cómo las sumas y series que incluyen términos racionales en k
pueden evaluarse en términos de la función digamma. Introduciendo otra vez fracciones parciales,
Los dos primeros términos no pueden manejarse por separado puesto que la serie diverge. Sin embargo,
ellos pueden manejarse en conjunto como en el problema 18.10. El resultado es
Otras sumas de términos racionales pueden tratarse de manera similar.
www.elsolucionario.org
ECUACIONES EN DIFERENCIAS
287
18.13 Evalúe la serie
Sumando los cuadrados como en el problema 5.2 es posible reemplazar la serie por
Puesto que ninguna de estas tres series converge en forma individual, no debemos tratar cada una por se­
parado. Extendiendo el artificio utilizado en el problema que acaba de resolverse podemos, sin embargo,
reescribir la combinación como
donde el problema 18.10 se ha aplicado dos veces en el último paso. Finalmente,
18.14 Muestre que
función gamma
tiene también la propiedad
donde Γ(x) es la
La función gamma está definida para x positivo mediante
La integración por partes expone la característica familiar
y la diferenciación lleva después a
de lo cual surge el resultado requerido sustituyendo x por x + 1.
Puesto que ψ(x + 1) - ψ(x) = ψ(x + 1), encontramos que
donde A es una constante, y donde x está restringida a un conjunto unitario con espaciamiento unitario. El
mismo resultado puede demostrarse para todo x con excepción de enteros negativos, siendo la constante A
igual a cero.
www.elsolucionario.org
288
MÉTODOS NUMÉRICOS
ECUACIÓN LINEAL DE SEGUNDO ORDEN, CASO HOMOGÉNEO
18.15 La ecuación de diferencias yk+2 + a1yk+1 + a2yk = 0 en la cual es posible que a, y a2 dependan de k. Se llama
lineal y homogénea. Demuestre que si uk y vk son soluciones, entonces lo son c1uk + c2vk para constantes
arbitrarias c1 y c2. (Éste es un rango que identifica una ecuación lineal homogénea. La ecuación es homo­
génea porque yk = 0 es una solución.)
Puesto que uk+2 + a1uk+1 + a2uk = 0 y vk+2 + a1uk+1 + a2vk = 0, se obtiene de inmediato, multiplicando la
primera ecuación por c1 y la segunda, por c2,
que era lo que se tenía que demostrar.
18.16 Muestre que para a, y a2 constantes, pueden encontrarse dos soluciones reales en términos de funciones
elementales.
Supongamos primero que a12 > 4a2. Entonces podemos tomar
Uk = r1k Uk = r2k
donde r1 y r2 son las raíces reales distintas de la ecuación cuadrática. Para poder probar esto verificamos di­
rectamente que
uk+2 + a1uk + a2uk = rk(r2 + a1r + a2) = 0
donde r es cualquiera de las raíces. La ecuación cuadrática incluida aquí se conoce como la ecuación ca­
racterística.
Supongamos después que a12 = 4a2. Entonces la ecuación característica sólo tiene una raíz, por
ejemplo r, y puede reescribirse como
Después de esto están disponibles dos soluciones reales en
La solución uk puede verificarse con exactitud como antes. En cuanto a vk.
puesto que ambos paréntesis son cero.
Por último, supongamos que a12 < 4a2. Entonces la ecuación característica tiene raíces conjugadas
complejas Re" 8 . Sustituyendo, encontramos
www.elsolucionario.org
18
ECUACIONES EN DIFERENCIAS
289
Esto requiere que ambos paréntesis se anulen:
R2 cos2 + a1R cos θ + a2 = 0
R2 sen 2 θ + a1R sen θ = 0
Verificamos ahora que las dos soluciones reales de la ecuación en diferencias son
uk =
R k senkθ
vk = R k coskθ
Por ejemplo,
Puesto que ambos paréntesis se anulan. La prueba para vk es casi idéntica.
Después se obtiene que para a, y a2 constantes, la ecuación y2K+2 + a1yk+1 + a2yk = 0 tiene siempre una
familia de soluciones elementales yk+2 = c1uk + c2vk.
18.17 Resuelva la ecuación en diferencias y k + 2 -2Ayk+1 + yk = 0 en términos de las funciones potencia, suponien­
do que A > 1.
Sea yk - rk y sustituyase para encontrar que es necesario que r2 - 2Ar + 1 - 0 .
Con k una de estas funciones potencia crece arbitrariamente hasta un valor arande v la otra tiende a
cero, ya que r1 > 1 pero 0 < r2 < 1. (El hecho de que r2
A2 + 1 - 2A < A2 - 1 después de tomar raíces cuadradas y de transponer términos.]
18.18 Resuelva la ecuación yk+2 - 2yk+1 + yk = 0.
Aquí tenemos a,2 = 4a2 = 4. La única raíz de r 2 - 2 r + 1 + 0 es r = 1 . Esto significa que uk =1, vk = k
son soluciones y que yk =c1+ c2K es una familia de soluciones. Lo cual difícilmente resulta una sorpresa en
vista del hecho de que esta ecuación en diferencias puede escribirse como ∆2yk = 0.
18.19 Resuelva yk+2 - 2Ayk+1 + yk = 0 donde A < 1 .
Ahora a12 < 4a2. Las raíces de la ecuación característica se vuelven
donde A = cos θ y R = 1. De tal modo uk = sen kθ, vk = cos k θ y la familia de soluciones
yk = c1sen k θ +
2 coskθ
puede aprovecharse.
Las funciones vk, cuando se expresan como polinomio en A, se conocen como polinomios de Chebyshev. Por ejemplo,
La ecuación en diferencias de este problema es la recurrencia para los polinomios de Chebyshev.
www.elsolucionario.org
290
MÉTODOS NUMÉRICOS
18
18.20 Muestre que si dos soluciones de
concuerdan en valor con dos enteros consecutivos
k, entonces deben concordar para todos los enteros k. (Suponga que a2 ≠ 0.)
de lo cual resulta que dm+2 = 0 y dm-1 = 0. De la misma manera puede probarse que dk es cero para k > m
2 y para k < m - 1, tomando los enteros uno por uno. De tal modo dk es igual a cero y uk = vk. (La suposi
ción a2 ≠ 0 garantiza únicamente que tenemos una ecuación de diferencias de segundo orden.)
de lo cual resulta quedm+2 = 0 y dm-1= 0. De la misma manera puede probarse que dk es cero parak > m + 2
y para k < m - 1, tomando los enteros uno por uno. De tal modo dk es igual a cero y uk = vk. (La suposición
a2 ≠ 0 garantiza únicamente que tenemos una ecuación de diferencias de segundo orden.)
18.21 Muestre que cualquier solución de
soluciones particulares uk y vk,
puede expresarse como una combinación de dos
siempre que el wronskiano
Sabemos que c1uk + c2vk es una solución. Por el problema anterior será idéntica a la solución yk si
concuerda con yk para dos valores enteros consecutivos de k. Con el propósito de obtener tal concordancia
elegimos k = 0 y k = 1 (podrían ser cualesquiera otros dos enteros) y determinamos los coeficientes c, y c2
mediante las ecuaciones
La solución única es
puesto que w1 ≠ 0.
18.22 Muestre que si el wronskiano es cero para un valor de k, debe ser idénticamente cero, suponiendo que uk y
vk son soluciones de la ecuación del problema 18.20. Aplique esto al caso particular del problema 18.16
para probar que wk ≠ 0.
Calculamos la diferencia
a partir de la cual resulta de inmediato que wk = a2k w0. Puesto que a2 ≠ 0, la única forma de que wk sea ce­
ro es tener w0 = 0. Pero en ese caso wk es idénticamente cero.
Cuando wk es idénticamente cero, se encuentra que uk / vk es lo mismo que uk-1 / vk-1 para todo k, es­
to es, uk / vk = constante. Puesto que este resultado no se cumplió para las uk y vk del problema 18.16, wk no
puede ser cero en ese caso.
www.elsolucionario.org
18
291
ECUACIONES EN DIFERENCIAS
18.23 Resuelva por cálculo directo el problema de valor inicial de segundo orden
y k + 2 = y k + 1 + yk
y 0 =0
y 1 =1
Tomando k = 0, 1, 2, . . . encontramos sin dificultad los valores sucesivos de yk, 1, 2, 3, 5, 8, 13, 21,
34, 55, 89, 144 . . . , los cuales se conocen como números de Fibonacci. El cálculo muestra con claridad
una solución creciente pero no presenta su carácter exacto.
18.24 Determine el carácter de la solución del problema anterior.
Siguiendo el curso histórico delineado en los problemas 18.15,18.16, etc., consideramos la ecuación
característica r2 - r -1 = 0.
Puesto que a21 > 4a2, hay dos raíces reales, a saber, r1,r2 = (1 ± √5)/2. Por consiguiente todas las so­
luciones pueden expresarse en la forma
Para satisfacer las condiciones iniciales, necesitamos
Esto hace.
18.25 Muestre que para los números de Fibonacci, lím
Para tal resultado conviene conocer el carácter de la función solución. Empleando el problema previo
encontramos, después de un breve cálculo,
tiene valor absoluto menor que 1, por lo que se obtiene el resultado que se requería.
18.26 Los números de Fibonacci ocurren en ciertos problemas que implican la transferencia de información a lo
largo de un canal de comunicaciones. La capacidad C de un canal se define como c = lím (log yk)/k, siendo
el logaritmo de base 2. Evalúe este límite.
También aquí se necesita el carácter analítico de la solución yk. Pero está disponible, y encontramos
haciendo
www.elsolucionario.org
292
18
MÉTODOS NUMÉRICOS
18.27 La ecuación
es lineal y no homogénea. Demuestre que si uk y vk son soluciones de la
ecuación homogénea asociada (con bk sustituida por 0) con un wronskiano que no se anule y, si yk es una
solución particular de la ecuación en su forma original, entonces toda solución puede expresarse como yk donde c1 y c2 son constantes apropiadas.
Con y* denotando cualquier solución de la ecuación no homogénea, y yk la solución particular,
y sustrayendo.
donde dk= yk - Yk. Pero esto hace que dk sea una solución de la ecuación homogénea, por lo que
que es el resultado requerido.
Por último,
18.28 Por el problema anterior, para encontrar todas las soluciones de una ecuación no homogénea podemos en­
contrar sólo una solución particular de tales características y unirla a la solución del problema homogéneo
asociado. Siga este procedimiento para
Cuando el término o* es una función potencia, con frecuencia puede encontrarse una solución que por
sí misma sea una función potencia. Aquí tratamos de determinar la constante C, de modo que yk = Cxk.
La sustitución lleva a
, haciendo
En consecuencia, todas las
soluciones pueden expresarse como
suponiendo x2 - x - 1 = 0, este intento falla.
18.29 Considerando el problema precedente, ¿cómo puede determinarse una solución particular yk en el caso en
el q u e x 2 - x - 1 = 0 ?
Tratando de determinar C de modo que
La sustitución da como resultado
hace que
, de lo cual
Esto
18.30 ¿Para qué tipo de término bk puede determinarse una solución elemental yk?
Siempre que bk sea una función potencia o una función seno o coseno, la solución Yk tiene un carác
ter similar. La tabla 18.1 presenta lo anterior de manera un poco más precisa. Si la Yk indicada en la tabl
18.1 incluye una solución de la ecuación homogénea asociada, entonces esta Yk debe multiplicarse por
hasta que no se incluyan tales soluciones. Se brindarán ejemplos adicionales de la eficacia de este proced
miento.
www.elsolucionario.org
ECUACIONES EN DIFERENCIAS
293
Yk
bk
Axk
kn
sen Ak o cosAk
knxk
xk senAk o xk cos Ak
Cxk
C0 + C1k + C 2 k 2 +... + Cnkn
C1sen Ak + C2 cos Ak
xk(C0 + C1k+ C2k2 +. . . + Cnkn)
xk(C1 senAk + C2 cos Ak)
Problemas suplementarios
18.31 Dada yk+1 = ryk + k y y0 = A, calcule y1, . . . ,y4 directamente. Después descubra el carácter de la función
solución.
18.32 Dada yk+1 = -yk + 4 y y0 = 1, calcule directamente y,.....,y4. ¿Cuál es el carácter de la función solución?
¿Puede usted descubrir el carácter de la solución para y0 arbitrario?
18.33 Si una deuda se amortiza mediante pagos regulares de monto R, y está sujeta a una tasa de interés i, el
balance de la deuda es Pk, donde Pk+1 = (1 + i)P k - R. Si la deuda inicial es P0 = A, pruebe que
Muestre también que para reducir Pk a cero en exactamente n pagos (Pn = 0)
debemos tomar R = Ai/[1 - (1 + i)-1].
18.34 Muestre que la ecuación de diferencias yk+1 = (k + 1)yk + (k + 1)! con la condición inicial y0 = 2, tiene la
solución yk = k! (k + 2).
18.35 Resuelva yk+1 = kyk + 2kk! con y0 = 0.
18.36 Aplique el método de Horner del problema 18.5 para evaluar
18.37 Adapte el método de Horner a p(x) = x - x3/3! + x 5 /5! - x7/7 + x9!/9!.
18.38 Muestre que para k > 0, (k + 1 )yk+1 + kyk = 2k - 3 tiene la solución yk = 1 - 2/k.
18.39 Muestre que la ecuación no lineal yk+1 = yk / (1 + yk) tiene las soluciones yk = C/(1 + Ck).
18.40 Resuelva la ecuación ∆yk = (1/k - 1)yk con la condición inicial y1 = 1.
partiendo de los resultados del problema 18.11 ¿Qué resultado general se in18.41 Calcule
etica para argumentos enteros?
18.42 Evalúe
en términos de la función ψ.
www.elsolucionario.org
294
18.43 Evalúe
MÉTODOS NUMÉRICOS
18
empleando el problema 18.41.
hasta tres lugares a partir de la definición de la serie, usando un artificio de aceleración. Cal18.44 Calcule
a partir de
cule después
y
18.45 ¿Cuál es el comportamiento de ψ(x) cuando x se aproxima a -1 desde valores mayores a dicho número.
18.46 Evalúe
donde p3(x) es el polinomio de Legendre de tercer grado.
18.47 Evalúe
donde T3(x) = 4x 3 - 3x y es el polinomio de Chebyshev de tercer grado.
18.48 Evalúe
donde P4(x) es el polinomio de Legendre de cuarto grado.
18.49 Cada yk+2 + 3yk+1 + 2yk = 0 con condiciones iniciales y0 = 2, y1 = 1, calcule y 2 , . . . , y10 directamente.
18.50 Resuelva el problema anterior mediante el método del problema 18.16.
18.51 Muestre que las soluciones de y k+2 - 4yk+1 + 4yk+1 = 0 son yk = 2K(c1 + c2k), donde c1 y c2 son constantes ar­
bitrarias.
18.52 Encuentre la familia de soluciones de yk+2 - yk = 0. Determine también la solución que satisfaga las con­
diciones iniciales y0 = 0, y1 = 1.
18.53 Resuelva y k + 2 - 7yk+1 + 12yk = cos k con y0 = 0, y1 = 0.
18.54 Resuelva 4yk+2 + 4yk+1 + yk = k2 con y0 = 0, y1 = 0.
18.55 Muestre que las soluciones de yk+2 -2yk+1 + 2yk = 0 son
18.56 Resuelva 2yk+ 2 -5yk+1 + 2yk = 0 con las condiciones iniciales y0 = 0, y1= 1.
18.57 Resuelva yk+2 + 6yk+1 + 25yk = 2k con y0 = 0, y1 = 0.
18.58 Resuelva yk+2 -4yk+1 + 4yk = sen k + 2K con las condiciones iniciales y0 = y1 = 0.
18.59 ¿Para qué valores de a las soluciones de yk+2 - 2yk+1 + (1 - a)yk = 0 son de carácter oscilatorio?
18.60 Resuelva yk+2 - 2yk+1 - 3yk = P2(k), donde P2(k) es el polinomio de Legendre de segundo grado y y0 = y1 = 0.
18.61 ¿Cuál es el carácter de las soluciones de yK+2 - 2ayk+1 + ayk = 0 para 0 < a < 1? ¿Para a = 1? ¿Para a > 1 ?
18.62 Muestre que la ecuación no lineal Qk+1 = a - b/Qk puede convertirse en la ecuación lineal yk+2 - ayk+1 +
byk - 0 mediante el cambio de argumento Qk = yk+1 1 / yk.
www.elsolucionario.org
18
ECUACIONES EN DIFERENCIAS
295
18.63 Demuestre que para N par no hay solución de yk+2 - yk = 0 que satisfaga las condiciones de frontera y0 = 0,
18.64 Demuestre que hay un número infinito de soluciones de la ecuación del problema anterior que satisfacen y0 = yN = 0.
18.65 Muestre que hay exactamente una solución de yk+2 - yk = 0 que satisface las condiciones de frontera y0 = 0,
yN = 1 si N es impar. Encuentre esta solución. Muestre también que hay exactamente una solución que
cumple y0 = yN = 0, a saber, yk = 0.
www.elsolucionario.org
Ecuaciones diferenciales
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el significado y ¡a utilidad de las ecuaciones diferenciales
(Introducción, Problemas 19.81 a 19.84).
2. Expresar con sus propias palabras las semejanzas y diferencias entre ecuaciones en diferencias y
ecuaciones diferenciales (Introducción, Capítulo 18)
3. Mencionar cuando menos cinco métodos para resolver ecuaciones diferenciales ordinarias
(Introducción, Problemas 19.67,19.68,19.76 a 19.80).
4. Explicar con sus propias palabras en qué consiste el método de las isoclinas y aplicarlo en los
problemas propuestos (Introducción, Problemas 19.1,19.55 a 19.57).
5. Explicar con sus propias palabras en qué consiste el método de Euler y aplicarlo en los problemas
propuestos (Introducción, Problemas 19.2,19.3,19.15,19.16,19.58 a 19.60).
6. Explicar con sus propias palabras en qué consiste el método de Taylor y aplicarlo en los problemas
propuestos (Introducción, Problemas 19.4,19.5,19.61).
7. Explicar con sus propias palabras en qué consisten los métodos de Runge-Kutta y aplicarlos en los
problemas propuestos (Introducción, Problemas 19.6 a 19.9,19.62,19.63).
8. Explicar con sus propias palabras en qué consisten los criterios de convergencia en el método de
Taylor y aplicarlos en los problemas propuestos (Problemas 19.10 a 19.13,19.75).
9. Explicar con sus propias palabras en qué consisten los criterios de convergencia en los métodos de
Runge-Kutta y aplicarlos en los problemas propuestos (Problemas 19.14).
10. Explicar con sus propias palabras en qué consisten los métodos de predicción-corrección y
aplicarlos en los problemas propuestos (Problemas 19.15 a 19.29,19.66).
11. Explicar con sus propias palabras en qué consisten los criterios de convergencia en los métodos de
predicción-corrección y aplicarlos en los problemas propuestos (Problemas 19.30 a 19.32).
12. Explicar con sus propias palabras en qué consiste el método de Milne y aplicarlo en los problemas
propuestos (Problemas 19.21,19.22,19.64,19.69,19.70).
13. Explicar con sus propias palabras en qué consiste el método de Adams y aplicarlo en los problemas
propuestos (Problemas 19.23,19.24,19.28,19.65).
14. Explicar con sus propias palabras los conceptos de error vistos en el capítulo 1, desde el punto de vista
de las ecuaciones diferenciales (convergencia, error por truncamiento, error por redondeo, error
relativo y error de seguimiento) (Introducción, Problemas 19.72 a 19.75).
15. Explicar con sus propias palabras el concepto de método computacionalmente estable (Problemas
19.33 a 19.43,19.71).
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
297
16. Explicar con sus propias palabras en qué consisten los métodos adaptativos y la influencia del tamaño
del incremento dentro de las ecuaciones diferenciales y aplicarlos en los problemas propuestos
(Problemas 14.27,19.44 a 19.49).
17. Explicar con sus propias palabras en qué consisten las ecuaciones rígidas y las fórmulas de Gear
dentro de las ecuaciones diferenciales y aplicarlas en los problemas propuestos (Problemas 19.50 a
19.54).
APLICACIONES DE LAS ECUACIONES DIFERENCIALES
Son evidentes las aplicaciones de las ecuaciones diferenciales en el enorme campo de los modelos matemáticos del mundo real, ya que en cualquier lugar donde se lleve a cabo un proceso continuamente cambiante
(dependiente del tiempo) (rapidez de variación de una variable con respecto a otra), suele resultar apropiado un modelo de ecuación diferencial.
Las ecuaciones diferenciales aparecen con mucha frecuencia en disciplinas muy diversas, tales como física atómica (tasa de dcscomposición de materiales radioactivos), química (tasa de cristalización de algún compuesto), ingeniería eléctrica (circuitos y redes), ingeniería mecánica (vibraciones, fuerzas), termodinámica (flujo
calorífico), biología (crecimiento bacteriológico), estadística (crecimiento poblacional), psicología, economía; asimismo desempeñan un papel importante en el estudio de los cuerpos celestes como planetas y satélites.
En la práctica una gran cantidad de ecuaciones diferenciales que tienen que ver con problemas en ingeniería, no se pueden resolver por los métodos tradicionales que se ven en los cursos de matemáticas o bien
cuando la evaluación de la solución analítica es muy complicada; éste es el momento de emplear métodos numéricos para su solución.
Las ecuaciones diferenciales se pueden dividir en dos grandes grupos: de primer orden y de órdenes superiores; las de órdenes superiores son más difíciles de resolver y serán tema del capítulo 20, las ecuaciones diferenciales de primer orden se tratarán ahora.
Muchos autores dividen los métodos numéricos para resolver las ecuaciones diferenciales en tres
grandes categorías:
a)
Métodos de un paso (Euler, Runge-Kutta). Estos algoritmos obtienen el siguiente valor Yn+1, cuando se
conoce un punto y el tamaño h del paso (incremento).
Puede ser de dos formas.
a.1. Empleando el desarrollo en series de Taylor.
a.2. Por la definición de integral definida.
b) Métodos de múltiples pasos (Adams-Bashforth, Adams-Moulton, Milne). Estos algoritmos requieren
el conocimiento de más de un punto y un tamaño de paso h; en términos generales se derivan usando la
definición de integral definida, y la primera derivada se aproxima por interpolación polinomial.
c)
Métodos iterativos de un paso (Euler-Romberg). Requieren sólo un punto y sucesivamente se va dividiendo por mitad el intervalo.
Todos los métodos emplean algoritmos explícitos o implícitos y su significado es el siguiente:
www.elsolucionario.org
298
MÉTODOS NUMÉRICOS
19
1. Explícitos: Cuando el siguiente resultado Yn+1 se obtiene a partir de valores definidos explícitamente.
2. Implícitos: Cuando el siguiente resultado Y nt1 , se obtiene a partir de valores definidos mediante predicción.
Aquellos algoritmos que emplean al mismo tiempo fórmulas explícitas e implícitas se llaman métodos de
predicción-corrección.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Análisis numérico
Manejo de ecuaciones
Ecuaciones en diferencias
Ecuaciones diferenciales
Ecuaciones diferenciales de órdenes superiores
Álgebra no lineal y optimización
Raíces de ecuaciones
Ceros de polinomios
Método de dcscenso más rápido (gradiente)
Sistemas de ecuaciones lineales
Sistemas de ecuaciones lineales
Programación lineal
Solución de sistemas inconsistentes
Problemas con valores en la frontera
www.elsolucionario.org
1
18
19
20
25
25
25
26
27
28
29
19
ECUACIONES DIFERENCIALES
299
EL PROBLEMA CLÁSICO
La solución de ecuaciones diferenciales es uno de los principales problemas del análisis numérico. Esto se
debe a que es muy amplia la variedad de aplicaciones que conducen a ecuaciones diferenciales, y a que sólo
unas cuantas pueden resolverse en forma analítica. El problema clásico del valor inicial es encontrar una función
y(x) que satisfaga la ecuación diferencial de primer orden y' = f(x, y) y tome el valor inicial y(x0) = y0. Se ha ideado
una amplia variedad de métodos para la solución aproximada de este problema, la mayor parte de los cuales se
han generalizado para tratar también problemas de más alto orden. El presente capítulo se orienta hacia los métodos de solución para este problema.
1. Se presenta primero el método de las isóclinas. Basado en la interpretación geométrica de y'(x) como la
pendiente de la curva solución, dicho método brinda una visión cualitativa de toda la familia de soluciones.
La función f(x, y) define la pendiente prescrita en cada punto. Este "campo de direcciones" determina el
carácter de las curvas de soluciones.
2.
El método histórico de Euler implica el cálculo de un conjunto discreto de valores yk, para argumentos
xk. empleando la ecuación de diferencias
donde h = xk+1,- xk. Ésta es una aproximación evidente y no tan precisa de y' = f(x, y).
3.
Se han desarrollado, en consecuencia, algoritmos más eficientes para calcular soluciones. La aproximación polinomial es la base de los algoritmos más populares. Excepto para ciertos métodos de seríes, lo
que en realidad se calcula es una sucesión de valores y» correspondientes a un conjunto discreto de argumentos xk , como en el método de Euler. La mayor parte de los métodos son equivalentes a la sustitución
de una ecuación diferencial dada por una ecuación en diferencias. La ecuación en diferencias particular
que se obtiene depende de la elección de la aproximación polinomial.
4.
La serie de Taylor se utiliza ampliamente. Si f(x, y) es una función analítica las derivadas sucesivas de
y(x) pueden obtenerse y la serie para y(x) puede cscribirse por completo en el formato estándar de Taylor.
Algunas veces una sola serie servirá para todos los argumentos de interés. En otros problemas una sola
serie puede converger muy lentamente para producir la precisión requerida para todos los argumentos de
interés y pueden utilizarse varias series de Taylor con puntos diferentes de cálculo. A la larga, el truncamiento de cualquiera de tales series significa que la solución está siendo aproximada por un polinomio de
Taylor.
5.
Los métodos de Runge-Kutta se desarrollaron para evitar el cálculo de derivadas de mayor orden que el
que puede incluir el método de Taylor. En lugar de estas derivadas se emplean valores extra de la función
dada f{x, y), en una forma que reproduce la precisión de un polinomio de Taylor. Las fórmulas más comunes son
www.elsolucionario.org
300
MÉTODOS NUMÉRICOS
19
pero hay numerosas variaciones.
6.
Los métodos predictor-corrector implican el uso de una fórmula para hacer una predicción del siguiente
valor de yk seguido por la aplicación de una fórmula de corrección más exacta que brinda, entonces, me­
joras sucesivas. Aunque un poco complejos, tales métodos tienen la ventaja de que, partiendo de aproxi­
maciones sucesivas para cada valor yk, puede realizarse una estimación del error. Un par predic­
tor-corrector simple es
siendo el predictor la fórmula de Euler y el corrector lo que se conoce como la fórmula de Euler modifica­
da. Puesto que y'k = f(xk, yk) y y'k+1 = f(xk+1 yk+1), el primer predictor estima yk+1. Esta estimación lleva en­
tonces al valor y'k+1 y, en consecuencia, al valor corregido y'k+1. Pueden realizarse correcciones
adicionales de y'k+1 y yk+1 en forma sucesiva hasta alcanzar un resultado satisfactorio.
7.
El método de Milne emplea el par predictor-corrector
en el cual se reconoce con facilidad la regla de Simpson. Requiere cuatro valores previos (yk, yk-1 yk-2,
yk-3) para prepararlo. Éstos deben obtenerse mediante un método diferente, a menudo la serie de Taylor.
8.
El método de Adams utiliza el par predictor-corrector
y como el método de Milne requiere cuatro valores previos.
ERROR
El error de truncamiento se obtiene cuando una suma parcial se utiliza para aproximar el valor de una serie
infinita y éste es quizá el uso original del término, que ahora se utiliza más libremente. Cuando una ecuación dife­
rencial es sustituida por una ecuación en diferencias, se produce un error local de truncamiento con cada paso ha­
cia adelante de k a k + 1. Estos errores locales se combinan en una forma no muy clara para producir el error de
truncamiento acumulativo o global. Pocas veces es posible seguir el desarrollo del error a través de un algoritmo
de ecuaciones diferenciales con algo de realismo, aunque son posibles algunas estimaciones aproximadas.
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
30t
Un método convergente es aquel que, cuando se refina continuamente al usarse más y más términos de la
serie, o intervalos más y más pequeños entre argumentos sucesivos, produce una sucesión de soluciones aproximadas que convergen hacia la solución exacta. Se demostrará que los métodos de Taylor, Runge-Kutta y algunos
de predictor-corrector son convergentes bajo circunstancias apropiadas. Las pruebas de convergencia tratan sólo
con el error de truncamiento, ignorando el problema de los redondeos.
El error de redondeo está presente en todos estos métodos, algunas veces de manera importante. Es más
evasivo que el error de truncamiento y un éxito muy limitado ha recompensado los esfuerzos realizados para analizarlo.
El error relativo de una aproximación, la tasa de error para la solución exacta, suele ser de mayor interés
que el propio error, puesto que si la solución crece mucho, entonces es posible tolerar un gran error. Incluso más
importante es el hecho de que, si la solución exacta se reduce, entonces el error debe hacer lo mismo o trastornará la solución y los resultados calculados no tendrán sentido. El problema simple y' = Ay, y(0) = 1, para el cual la
solución exacta es y = eAX, sirve a menudo como un caso de prueba para seguir el comportamiento del error relativo en nuestros diferentes métodos. Hay la esperanza de que la información obtenida de esta manera tendrá alguna importancia para el uso de los mismos métodos en la ecuación general y' - f(x, y). Esto puede parecer optimista, pero el estudio del error tiene sus limitaciones.
Un método estable es aquel para el cual el error relativo permanece acotado de manera optimista, por su
valor inicial. Éste es un fuerte requisito que puede ser difícil de verificar. Además, un método puede ser estable para algunas ecuaciones e inestable para otras. Sólo pueden ofrecerse resultados parciales, en particular para la
ecuación y' - Ay.
La supervisión de errores se refiere a un esfuerzo paso a paso para medir el error local de truncamiento y
utilizar esta información para determinar si el tamaño del paso que se está realizando es adecuado o no con los
métodos de predictor-corrector, puede efectuarse una estimación práctica del error empleando los valores predichos y corregidos. Con los métodos de Runge-Kutta, una computación paralela que emplea el doble del tamaño
del paso, conduce a una estimación de error como la de la integración ajustada. Aquí, como en ese caso, el objetivo es alcanzar un resultado final de la precisión especificada con el mínimo esfuerzo.
Problemas resueltos
EL MÉTODO DE LAS ISÓCLINAS
19.1
Utilice el método de las isóclinas para determinar el comportamiento cualitativo de las soluciones de y'(x) xy1/3.
Esta ecuación puede, desde luego, resolverse mediante métodos elementales pero la usaremos
como un caso de prueba para diversos métodos de aproximación. El método de las isóclinas se basa en la
familia de curvas y'(x) - constante que no son en sí mismas soluciones, pero que son útiles para determinar el carácter de las soluciones. En este ejemplo las isóclinas son la familia xy1/3 = M, donde M es el
valor constante de y'(x). Algunas de estas curvas se bosquejan (punteadas) en la figura 19-1, con los
valores M indicados. En donde una solución de la ecuación diferencial cruce una de esas isóclinas, la pendiente de la misma debe corresponder al número M de esa isóclina. Se incluyen también unas cuantas curvas solución (continuas) en la figura 19-1. Otras pueden bosquejarse, al menos en forma aproximada. La
precisión no es el objetivo del método de las isóclinas sino el carácter general de la familia de soluciones.
Por ejemplo hay simetría en tomo a cada eje. Una solución a través de (0, 0) y las que están sobre ella
tienen forma de U. Las soluciones por debajo de la primera de las anteriores son muy poco usuales. A lo
largo de y - 0 pueden venir juntas diferentes soluciones. Una solución puede comprender incluso una parte
del eje x. Una de tales soluciones podría entrar en (0,0) en un arco dcscendente, seguir por el eje hasta (2,
www.elsolucionario.org
302
MÉTODOS NUMÉRICOS
19
0) y después empezar a ascender otra vez como se muestra en la figura 19-2. Las combinaciones posibles
de linea y arco son incontables. La información de esta clase suele ser una guía útil cuando se realizan es­
fuerzos para calcular soluciones precisas.
Fig. 19-1
Fig. 19-2
EL MÉTODO DE EULER
19.2
ilustre el método de Euler más simple para el cálculo de una solución de
Éste es quizá el artificio original para convertir el método de las isóclinas en un esquema computacional. Se utiliza la fórmula
que es igual a considerar y' constante entre xk y xk+1. Equivale también a la parte lineal de una serie de
Taylor, de modo que si yk y y'k se conocieran con exactitud, el error en yk+1 sería 1/2h2y(2)(ξ). Esto se llama
error de truncamiento local, ya que éste se efectúa en el Intervalo de xk a xk+1,. Puesto que el error es bas­
tante grande, se desprende que serían necesarios incrementos h más bien pequeños para lograr mayor
precisión.
La fórmula rara vez se utiliza en la práctica pero sirve para indicar la naturaleza de la tarea que debe
realizarse y algunas de las dificultades que se enfrentarán. Con x0, y0 = 1 tres aplicaciones de esta fórmula
de Euler, empleando h = .01, producen
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
303
Cerca de x = 1 tenemos
que hace el error de truncamiento, en cada paso,
aproximadamente de .00007. Después de tres errores semejantes, ya no puede confiarse en el cuarto lugar
decimal. La acumulación del error de truncamiento se ilustra también en la figura 19-3, donde los puntos
calculados se han unido para indicar una curva de solución. Nuestra aproximación equivale a seguir en for­
ma sucesiva las líneas tangentes a diversas soluciones de la ecuación. Como resultado, la aproximación
tiende a seguir el lado convexo de la curva de solución. Note que la fórmula de Euler es también una ecua­
ción en diferencias no lineales de primer orden:
solución calculada
Fig. 19-3
19.3
Ilustre el concepto de convergencia comparando los resultados de la aplicación del método de Euler,
con h = .10, .05 y .01, con la solución correcta y = [(x2 + 2)/3]3/2.
La convergencia se refiere al mejoramiento de las aproximaciones cuando el intervalo h tiende a cero.
Un método que no converja es de valor incierto como un esquema de aproximación. Después se probará la
convergencia para los diversos esquemas que se presentarán, pero como evidencia circunstancial los da­
tos de la tabla 19.1, obtenidos con el método de Euler, son indicativos. Sólo se incluyen valores para argu­
mentos x enteros, omitiéndose los demás para abreviar.
Note que a través de cada renglón hay una tendencia tranquilizadora hacia el valor exacto. El empleo
de intervalos más pequeños equivale a mayores cálculos. Por ejemplo, el valor 25.96 en el renglón inferior
se obtuvo en 50 pasos, en tanto que el valor de 26.98 requirió 500 pasos. La labor extra ha traído una mejo­
ra, que no parece ser tan buena. Cuando h tiende a cero, el cálculo crece incluso más y esperamos que los
resultados se aproximen a los valores exactos como límites. Éste es el concepto de convergencia. Convie­
ne aclarar que los errores de redondeo limitarán la precisión alcanzable, pero ellos no son parte del tema de
la convergencia.
Tabla 19.1
X
h =.10
h =.05
h = .01
Exacta
1
2
3
4
5
1.00
2.72
6.71
14.08
25.96
1.00
2.78
6.87
14.39
26.48
1.00
2.82
6.99
14.63
26.89
1.00
2.83
7.02
14.70
27.00
www.elsolucionario.org
MÉTODOS NUMÉRICOS
19
Aplique el método de Taylor para obtener una solución de
valores de x dados en la tabla 19.2.
en tres lugares para los
304
EL MÉTODO DE TAYLOR
19.4
Hablando en general, el método implica utilizar p(x + h) en lugar de y(x + h), donde p(x) es el polino­
mio de Taylor para la variable x. Podemos escribir directamente
aceptando un error de truncamiento local equivalente a
Las derivadas de mayor orden de y(x) se calculan a partir de la ecuación diferencial:
La condición inicial y(1) = 1 se ha prescrito, por lo que con x = 1 y h = .1 encontramos
Al aplicar después la fórmula de Taylor en x = 1.1 se encuentra
y(l.l + .1) ≈ 1.22788
y(l.l
- .1) ≈ 1.00000
La segunda de éstas sirve como una comprobación de la precisión puesto que reproduce nuestro primer re­
sultado hasta una exactitud de cinco lugares. (Se trata del mismo procedimiento utilizado en el capítulo 14
para la integral de la función error.) Continuando de esta manera, se obtienen los resultados que se presen­
tan en la tabla 19.2. Con el fin de poder comparar se incluye de nuevo la solución exacta. Aunque se utilizó
h = . 1 , sólo se listan valores para x = 1 (.5)5. Note que los errores son mucho más pequeños que los produ­
cidos con el método de Euler con h = .01. El método de Taylor es un algoritmo que converge de modo más
rápido.
Tabla 19.2
X
Resultado
de Taylor
Resultado
exacto
Error
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
1.00000
1.68618
2.82846
4.56042
7.02123
10.35252
14.69710
20.19842
27.00022
1.00000
1.68617
2.82843
4.56036
7.02113
10.35238
14.69694
20.19822
27.00000
-1
-3
-6
-10
-14
-16
-20
-22
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
305
19.5 Aplique el método de Taylor a y' = -xy2 para obtener la solución que satisfaga y(0) = 2.
El procedimiento del problema anterior podría aplicarse. Sin embargo, en lugar de ello se ilustrará una
alternativa, esencialmente un método de coeficientes indeterminados. Suponiendo convergencia al principio, escribimos la serie de
Entonces
Sustituyendo en la ecuación diferencial y haciendo cambios menores en los índices de la suma,
La comparación de los coeficientes de xi hace at = 0 y
La condición inicial obliga a que a0 = 2 y encontramos mediante recurrencia
y asi sucesivamente. La recurrencia puede programarse de modo que los coeficientes puedan calcularse
en forma automática tanto como se desee. La serie indicada es
y(x) = 2(1 - x2 + x4 - x6 + x8-...)
Puesto que se encuentra fácilmente que la solución exacta es y(x) = 2 /(1 + x2), la serie obtenida no es una
sorpresa.
Este método tiene una gran aplicación. La principal suposición que se considera es que la solución no
tiene en realidad una representación en serie. En este caso la serie converge sólo para -1 < x < 1. Para
- 1/2 < x < 1/2 sólo se necesitan seis términos para proporcionar una precisión de tres lugares. En el proble­
ma anterior se utilizó un nuevo polinomio de Taylor para cada uno de los valores calculados. Aquí es sufi­
ciente un solo polinomio. La cuestión corresponde al intervalo y a la precisión que se requiere. Para proce­
der hasta x = 5, por ejemplo, puede emplearse el método que se presentó antes. Como marco adicional de
contraste, también podemos notar que en el problema 19.4 se utilizan polinomios de grado fijo y la cuestión
de la convergencia no surge en forma explícita. En este problema incluimos la serie completa en la ecua­
ción diferencial, suponiendo que y(x) es analítica en el intervalo de interés.
www.elsolucionario.org
306
MÉTODOS NUMÉRICOS
19
MÉTODOS DE RUNGE-KUTTA
19.6 Encuentre los coeficientes a, b, c, d, m, n y p de modo que las fórmulas de Runge-Kutta
k1 = hf(x, y)
k2 = hf(x + mh, y + mk1)
K3 = hf(x + nh, y + nk2)
k4 = hf(x+ph,y+pk3)
y(x + h)- y(x) ≈ ak1+bk2 + ck3 + dk4
reproduzcan la serie de Taylor hasta el término h4. Note que la última fórmula, aunque no es un polinomio
de aproximación, se acerca a un polinomio de Taylor de cuarto grado.
Expresamos primero la serie de Taylor en una forma que facilita las comparaciones. Sea
Diferenciando después la ecuación y' = f(x, y) encontramos
que permite escribir la serie de Taylor como
Regresando ahora a los diferentes valores de k, cálculos similares producen
Combinando éstos en la forma indicada por la fórmula final de Runge-Kutta,
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
307
La comparación con la serie de Taylor indica ahora las ocho condiciones
Estas ocho ecuaciones con siete incógnitas son en realidad un poco redundantes. El conjunto solución clá­
sico es
conduciendo a las fórmulas de Runge-Kutta
Es interesante notar que para f(x, y) independiente de y esto se reduce a la regla de Simpson aplicada a
y'(x) = f(x).
19.7
¿Cuál es la ventaja de las fórmulas de Runge-Kutta sobre el método de Taylor?
Aunque son aproximadamente las mismas que el polinomio de Taylor de cuarto grado, estas fórmulas
no requieren el cálculo previo de las derivadas mayores de y(x), como ocurre con el método de Taylor.
Puesto que las ecuaciones diferenciales que surgen a menudo son complicadas, el cálculo de las derivadas
puede ser oneroso. Las fórmulas de Runge-Kutta más bien implican el cómputo de f(x, y) en diversas posi­
ciones y esta función ocurre en la ecuación dada. El método se utiliza ampliamente.
19.8
Aplique la fórmula de Runge-Kutta a y' = f(x, y) = xy1/3, y(1) = 1.
Con x0 = 1, y h = .1 encontramos
de la cual calculamos
Esto completa un paso e iniciamos otro con x1 y y1 en lugar de x0 y y0, y continuamos en esta forma. Puesto
que el método reproduce la serie de Taylor hasta h4, es natural esperar resultados similares a los encontra-
www.elsolucionario.org
308
19
MÉTODOS NUMÉRICOS
dos mediante el método de Taylor. La tabla 19.3 presenta unas cuantas comparaciones y encontramos dife­
rencias en los últimos dos lugares. Esto se explica parcialmente por el hecho de que los errores de trunca­
miento locales de los dos métodos no son idénticos. Ambos son de la forma Ch5, pero el factor C no es el
mismo. Además, los errores de redondeo suelen diferir incluso entre algoritmos que son algebraicamente
idénticos, que no es el caso de los de este problema. Aquí es claro que las fórmulas de Runge-Kutta son
más ventajosas.
Tabla 19.3
19.9
X
Taylor
Runge-Kutta
Exacta
1
2
3
4
5
1.00000
2.82846
7.02123
14.69710
27.00022
1.00000
2.82843
7.02113
14.69693
26.99998
1.00000
2.82843
7.02113
14.69694
27.00000
Ejemplifique variaciones de las fórmulas de Runge-Kutta.
No es difícil comprobar que
en la que y denota a y(x), reproduce la serie de Taylor hasta términos de segundo grado. (Véase el proble­
ma 19.63). Esto, entonces, se conoce como un método de Runge-Kutta de segundo orden. De modo si­
milar,
tiene orden tres. También existen otros métodos de orden dos y tres. El conjunto
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
309
es un método alternativo de cuarto orden, en tanto que el conjunto más extraño
tiene orden cinco. Cuanto mayor es el orden, tanto más grande es la diversidad de los métodos posibles, y
tanto menor el error de truncamiento. Un método de orden n reproduce la serie de Taylor hasta términos de
grado n, y asi tiene el error de truncamiento
lo cual significa que para una función continua y(x) el cálculo puede proceder con un h relativamente gran­
de y se avanza con mayor rapidez. El desarrollo de métodos de mayor orden implica un poco de álgebra di­
fícil, y ha sido factible solo con la ayuda de programas de computadora para hacer los procedimientos.
CONVERGENCIA DEL MÉTODO DE T A Y L O R
19.10 La ecuación y' = y con y(0) = 1 tiene la solución exacta y(x) = ex. Muestre que los valores aproximados yk
obtenidos por medio del método de Taylor convergen hacia esta solución exacta para h tendiendo a cero y
p fija. (El concepto de convergencia más familiar conserva h fija y deja que p tienda a infinito.)
El método de Taylor implica aproximar cada valor correcto yk+1 mediante
En el presente problema todas las derivadas son las mismas, lo que produce
Cuando p = 1 esto se reduce al método de Euler. En cualquier caso es una ecuación en diferencias de pri­
mer orden. Su solución con Y0 = 1 es
www.elsolucionario.org
310
MÉTODOS NUMÉRICOS
19
Pero por la fórmula del polinomio de Taylor,
con ξ entre 0 y 1. Recordando ahora la identidad
encontramos para el caso a > r > 0,
ak -rk < (a- r)kak-1
Eligiendo a = eh y r como antes, esta última desigualdad se convierte en
siendo el último paso una consecuencia de 0 < ξ < 1. La cuestión de la convergencia se refiere al comporta­
miento de los valores calculados para un argumento x fijo cuando h tiende a cero. En consecuencia, pone­
mos xk = kh y reescribimos nuestro último resultado como
Después elegimos una sucesión de pasos de tamaño h, de manera tal que xk se repita indefinidamente en
el conjunto de argumentos finitos de cada cálculo. (La forma más simple es dividir continuamente h a la mi­
tad.) Por la desigualdad anterior la sucesión de valores yk obtenida en el valor fijo xk converge al exk como hp.
Desde luego, la implicación práctica es que cuanto más pequeño se elija h tanto más cerca estará el resul­
tado calculado de la solución exacta. Los errores de redondeo, que no se han considerado en este proble­
ma, limitarán naturalmente la precisión alcanzable.
19.11 ¿Cómo se comporta el error de la aproximación de Taylor, según se desarrolló en el problema previo, para
un tamaño de paso fijo cuando k aumenta, en otras palabras, cuando el cálculo se alarga en forma consi­
derable?
Observe que ésta no es una cuestión de convergencia, puesto que h es fijo. Es una cuestión relativa
a cómo se acumula el error, debido al truncamiento de la serie de Taylor en el término hp, cuando el cálculo
continúa. Por la última desigualdad vemos que el error contiene la verdadera solución como un factor. En
realidad es el error relativo el que puede ser más importante, ya que se relaciona con el número de dígitos
significativos en nuestros valores calculados. Encontramos
que para h fijo, crece linealmente con xk.
19.12 Demuestre la convergencia del método de Taylor para la ecuación general de primer orden y' = f(x, y) con
la condición inicial y(x0) = y0 considerando suposiciones apropiadas para f(x, y).
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
311
Esto generaliza el resultado del problema 19.10. Utilizando de nuevo Y para la solución aproximada,
el método de Taylor produce
donde todas las entradas Yk(i) se calculan a partir de la ecuación diferencial. Por ejemplo,
y omitiendo los argumentos con el fin de abreviar
entendiéndose que f y sus derivadas se evalúan en xk, Yk y que Yk denota el valor calculado en los puntos
xk. Las otras Yk(i) se obtienen a partir de fórmulas similares, aunque más complicadas. Si utilizamos y(x) pa­
ra representar la solución exacta del problema diferencial, entonces la serie de Taylor ofrece una expresión
similar para y(Xk+1),
siempre que la solución exacta tenga realmente tales derivadas. Como es usual, ξ se encuentra entre xk+1
xk+1 . En vista de que y '(x) = f (x, y(x)), tenemos
y diferenciando
En la misma forma
y asi sucesivamente. La sustracción produce ahora
Note después de esto que si f(x, y) satisface la condición de Lipschitz,
Supondremos además que f(x, y) es tal que
Puede demostrarse que esto es cierto, por ejemplo, para j = 1,........,p si f(x, y) tiene derivadas continuas
www.elsolucionario.org
312
19
MÉTODOS NUMÉRICOS
hasta el orden p + 1. Esta misma condición también garantiza que la solución exacta y(x) tiene derivadas
continuas hasta el orden p + 1, un hecho supuesto antes. De acuerdo con estas suposiciones para f(x, y)
dejamos ahora dk = y(xk) - Yk y tenemos
donde 6 es una cota sobre | yp+1 (x)|. Por brevedad, esto puede reescribirse como
donde
Ahora comprobamos que
Los números α y β son positivos. Puesto que tanto la solución exacta como la aproximada satisfacen la
condición inicial d0 = 0 y la última desigualdad se cumple para k - 0. Para probarlo por inducción lo supon­
dremos para algún entero no negativo k y encontramos
resulta el último paso en vista de que 1 + α < θα. La inducción es, por tanto, válida y la desigualdad se cum­
ple para enteros no negativos k. Puesto que α = Lh + εh < Mh, donde ε tiende a cero con h, podemos sus­
tituir L por la M un poco mayor y obtener
con el cambio usual de argumento xk = x0 + kh, por lo que la convergencia es otra vez como hp.
19.13 Qué indica el resultado del problema 19.12 acerca del error para h fijo cuando el cálculo continúa hasta ar­
gumentos xk más grandes?
El resultado es adecuado para probar la convergencia, pero puesto que la solución exacta se desco­
noce, no conduce de inmediato a una estimación del error relativo. En forma adicional se han explorado un
análisis del error y una extrapolación al proceso de limite.
19.14 ¿Los métodos de Runge-Kutta, también son convergentes?
Puesto que estos métodos reproducen la serie de Taylor hasta cierto punto (en nuestro ejemplo hasta
el término h4), la prueba de la convergencia es similar a la que acaba de presentarse para el propio método
de Taylor. Los detalles son más complicados y se omitirán.
EL MÉTODO PREDICTOR-CORRECTOR
19.15 Deduzca la fórmula modificada de Euler
www.elsolucionario.org
y su error de truncamiento local.
ECUACIONES DIFERENCIALES
313
La fórmula puede producirse aplicando la regla trapezoidal a la integración de y' como sigue:
Por el problema 14.66, el error en esta aplicación de la regla trapezoidal a y' será -h 3 y (3) (ε)/12, y és­
te es el error de truncamiento local. (Recuerde que el error de truncamiento local se refiere a errores intro­
ducidos por la aproximación hecha en el paso de xk a xk+1 , esto es, en el proceso de integración. Efectiva­
mente pretendemos que yk y que los valores anteriores se conozcan de modo correcto.) Comparando
nuestro resultado con el obtenido por el más simple método de Euler, encontramos, desde luego, el error
presente bastante más pequeño. Esto puede considerarse como una recompensa natural que brinda el uso
de la regla trapezoidal en lugar de regla de integración aún más primitiva. También es interesante notar que
en vez de tratar a y' constante entre xk y xk+1, por lo que y(x) se supone lineal, la consideraremos lineal en
este intervalo, de modo que y(x) se supone cuadrática.
19.16 Aplique la fórmula modificada de Euler al problema y' = xy1/3, y(1) = 1.
Aunque este método rara vez se usa en un cálculo serio, sirve para ilustrar la naturaleza del método
predictor-corrector. Suponiendo que se conocen y* y y*', las dos ecuaciones
se utilizan para determinar yk+1 y y'k+1' .Se empleará un algoritmo iterativo muy similar a los que se presen­
tan en el capitulo 25 para determinar raíces de ecuaciones. Aplicado en forma sucesiva, empezando con
k = 0, este algoritmo genera sucesiones de valores y* y y/. Es interesante recordar una acotación señalada
en la solución del problema anterior referente a que estamos tratando a y(x) como si fuera cuadrática entre
los valores xk. Por consiguiente, nuestra aproximación completa a y(x) puede verse como una cadena de
segmentos parabólicos. Tanto y(x) como y'(x) serán continuas, en tanto que y"(x) tendrá brincos en los
"puntos de unión" (xk., yk).
Para desatar cada paso hacia adelante de nuestro cálculo, la fórmula más simple de Euler se utilizará
como un predictor. La cual brinda la primera estimación de yk+1. Aquí, con x0 =1 y h = .05 produce
y(1.05) ≈ 1 +(.05)(1) = 1.05
La ecuación diferencial se presenta entonces con
y'(1.05) ≈ (1.05)(1.016) ≈ 1.0661
Después de esto la fórmula modificada de Euler sirve como un corrector, produciendo
y(105) ≈ 1 + (.025)(1 + 1.0661) ≈ 1.05165
Con este nuevo valor la ecuación diferencial corrige y' (1.05) a 1.0678, después de lo cual se vuelve a apli­
car el corrector, dando como resultado
y(1.05) ≈ 1 + (.025)(1 +10678) ≈ 1.0517
Otro ciclo reproduce estos valores de cuatro lugares, asi que interrumpimos el proceso. Este empleo iterati­
vo de la fórmula del corrrector, junto con la ecuación diferencial, es el núcleo del método predictor-corrector.
www.elsolucionario.org
314
MÉTODOS NUMÉRICOS
19
Se itera hasta que ocurre la convergencia, suponiendo que así sucederá. (Véase el problema 19.29 como
demostración.) Es tiempo entonces para el siguiente paso hacia adelante, empezando otra vez por una sola
aplicación de la fórmula del predictor. Puesto que ahora se obtendrán fórmulas predictor-corrector más po­
derosas, no debemos seguir el cálculo presente. Note, sin embargo, que el único resultado que tenemos es
sólo dos unidades demasiado pequeñas en el último lugar, lo que comprueba que nuestra fórmula de co­
rrector es más precisa que el predictor más simple de Euler, el cual apenas produjo una precisión de cuatro
lugares con h - .01. Después de esto se desarrollarán combinaciones más poderosas de predictor-correc­
tor.
19.17 Obtenga la fórmula del "predictor" yk+1 ≈ yk-3 + 4/3 h (2y'k-2 - y'k-1 + 2yk').
Antes (capítulo 14) integramos un polinomio de colocación sobre todo el intervalo de colocación
(fórmula de Cotes) y también sobre sólo una parte de ese intervalo (fórmulas con correcciones finales). El
segundo procedimiento conduce a resultados más precisos, aunque laboriosos. Ahora integramos un poli­
nomio de colocación sobre más de un intervalo de colocación. No es demasiado sorprendente que la fórmu­
la resultante tendrá una precisión un poco menor, pero de cualquier modo desempeña un importante papel.
El polinomio
satisface pk = y'k para k = - 1 , 0, 1. Es un polinomio de colocación para y'(x) en la forma de la fórmula de
Stirling de segundo grado, una parábola. Integrando de k - -2 a k - 2, obtenemos
Con el cambio usual de argumentos x = x0 + kh esto se convierte en
Puesto que estamos considerando a p(x) como una aproximación a y'(x),
Puesto que el mismo argumento se aplica en otros intervalos, todos los índices pueden incrementarse
en k - 1 para obtener la fórmula de predictor requerida. Se llama también así porque permite predecir y2 a
partir de los datos para argumentos más pequeños.
19.18 ¿Cuál es el error de truncamiento local de este predictor?
Puede estimarse mediante el método de la serie de Taylor. Utilizando el cero como un punto de refe­
rencia temporal.
resulta que
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
315
La diferenciación produce además
a partir de la cual encontramos
Por tanto, el error de truncamiento local es
de la cual el primer término se utilizará como una estimación. Para nuestro intervalo corrido esto se vuelve
19.19 Compare el error del predictor con el de la fórmula del "corrector"
Este corrector es en realidad la regla de Simpson aplicada a y'(x). El error de truncamiento local es
entonces
por el problema 14.65. De tal modo Ep ≈ -28E c donde se ha ignorado la diferencia en argumentos de y ( 5 ) .
19.20 Muestre que el error de la fórmula del corrector del problema 19.19 puede estimarse en términos de la
diferencia entre los valores del predictor y del corrector.
Considerando sólo los errores de truncamiento local hechos en el paso de xk a xk+1, tenemos
con P y C denotando los valores del predictor y del corrector. Por tanto,
y
más o menos. No es poco común aplicar esta estimación como una corrección adicional, lo que produce
y esta fórmula tiene un error de truncamiento de orden h6. Bajo ciertas condiciones, sin embargo, la utiliza­
ción de tales términos puede hacer inestable el cálculo.
www.elsolucionario.org
316
MÉTODOS NUMÉRICOS
19
19.21 El método de Milne utiliza la fórmula
como un predictor, junto con
como un corrector. Aplique este método utilizando h - .2 en el problema y' - -xy2, y(0) - 2.
El predictor requiere cuatro valores previos, que combina en yk+1. El valor inicial y(0) - 2 es uno de
éstos. Los otros deben obtenerse. Puesto que todo el cálculo se basará en estos valores iniciales, vale la
pena un esfuerzo adicional para obtenerlos con razonable precisión. El método de Taylor o el de RungeKutta pueden utilizarse para encontrar
y(.2) = y1 ≈ 1.92308
y(.4) = y2 ≈ 1.72414
y (.6) = y3 ≈ 1.47059
correctos hasta cinco lugares. La ecuación diferencial produce entonces
y'(0) = y'0 = 0
y'(.2) = y'1 ≈ -.73964
y'(.4) = y'2 = -1.18906 y'(.6) = y'3≈ -1.29758
correctos hasta cinco lugares. El predictor de Milne maneja en consecuencia
En la ecuación diferencial encontramos después de esto nuestra primera estimación de y'4,
y'4 ≈ -(.8)(1.23056)2 ≈ -.21142
El corrector de Milne proporciona de ese modo la nueva aproximación,
Volviendo a calcular y' partiendo de la ecuación diferencial se llega a la nueva estimación y'4 ≈ -1.18698. Al
volver a aplicar el corrector, tenemos después
Aplicando otra vez la ecuación diferencial, encontramos
y'4 = -1.19015
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
317
y regresando al corrector,
Los siguientes dos redondeos producen
y'4 ≈ -1.18974
y4 ≈ 1.21953
y'4
≈
-1.18980
y4 ≈ l. 21953
y puesto que nuestras dos últimas estimaciones de y4 concuerdan, podemos detenernos. El empleo iterati­
vo de la fórmula del corrector y de la ecuación diferencial ha probado ser un proceso convergente, y el valor
y< resultante es en realidad correcto hasta cuatro lugares. En este caso cuatro aplicaciones del corrector
han llevado a la convergencia. Si h se elige demasiado grande en un proceso de este tipo, es posible que
sea necesario un número excesivo de ciclos iterativos para la convergencia o el algoritmo puede no conver­
ger del todo. Grandes diferencias entre las salidas del predictor y del corrector indican el incremento de h y
quizá acelerar el cómputo. El cálculo de y's y y's puede ahora efectuarse de la misma manera. En la tabla
19.4 se presentan los resultados hasta x = 10. Aunque se utilizó h = .2, sólo se incluyeron los valores para
valores enteros por brevedad. Los valores exactos se presentan con fines comparativos.
Tabla 19.4
X
y (correcta)
y (predicha)
Error
y (correcta)
Error
0
1
2
3
4
5
6
7
8
9
10
2.00000
1.00000
.40000
.20000
.11765
.07692
.05405
.04000
.03077
.02439
.01980
1.00037
.39970
.20027
.11737
.07727
.05364
.04048
.03022
.02500
.01911
-37
30
-27
28
-35
41
-48
55
-61
69
1.00012
.39996
.20011
.11750
.07712
.05381
.04030
.03041
.02481
.01931
-12
4
-11
15
-20
14
-30
36
-42
49
19.22 Analice el error del cálculo anterior.
Puesto que la solución exacta se conoce para este caso de prueba, es fácil ver algunos aspectos que
suelen ser bastante oscuros. La quinta derivada de y(x) = 2/(1 + x2) tiene el comportamiento general que se
muestra en la figura 19-4.
Las grandes fluctuaciones entre 0 y 1 usualmente harían difícil usar nuestras fórmulas del error de
truncamiento. Por ejemplo, el error local del predictor es 14h)5y(5)/45 y en nuestro primer paso (para x - .8)
encontramos un error en el predictor de -.011. Esto corresponde a y(5) ≈ -100. El error local del corrector es
-h(5)y(5)/90 y en el mismo primer paso el error fue en realidad de -.00002. Esto corresponde a y(5) ≈ 6. Este
cambio de signo en y(5) anula el cambio anticipado en el signo del error entre los resultados del predictor y
el corrector. En este caso significa también que un intento por usar la extrapolación a la idea de limite
www.elsolucionario.org
318
MÉTODOS NUMÉRICOS
19
Fig. 19-4
conduciría a peores resultados en vez de mejorar. El signo oscilante del error conforme continúa el cálculo
se analizará después.
19.23 Deduzca la fórmula de predictor de Adams
Como en el problema 19.17, obtenemos este predictor integrando un polinomio de colocación más
allá del intervalo de colocación. La fórmula regresiva de Newton de tercer grado, aplicada a y'(x), es
donde como es usual xk = x0 + kh. Integrando de k = 0 a k = 1 (aunque los puntos de colocación son k = 0,
- 1 , - 2 , -3), obtenemos
En términos de la variable x y utilizando p(x) ≈ y'(x), ésta se convierte en
Puesto que puede aplicarse el mismo razonamiento entre xk y xk+1 podemos sumar k a todos los índices
para obtener el primer resultado que se pide. El segundo se obtiene después de escribir las diferencias en
términos de los valores de y.
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
319
19.24 ¿Cuál es el error de truncamiento local del predictor de Adams?
El planteamiento usual de la serie de Taylor conduce a E = 251 h5y(5) / 720.
19.25 Obtenga otro predictor de la forma
Variando el planteamiento, debemos hacer esta fórmula exacta para polinomios hasta de cuarto gra­
do. Las elecciones adecuadas son y(x) = 1, (x - x k ), (x - xk )2, (x - xk)3 y (x -x k ) 4 . Lo cual produce cinco
condiciones
1 = a0 + a1 + a2
1 = -a1 - 2a2 + b0 + b1 + b2 +
1 = a1 + 4a2 - 2b1 - 4b 2 - 6b3
b3
1 = - a1 - 8a2 + 3b1 + 12b2 + 27b3
1 = a1 + 16a2 - 4b1 - 32b 2 - 108b3
que puede resolverse en la forma
con a1 y a2 arbitrarias. La elección a1 = a2 nos regresa al problema anterior. Otras dos elecciones simples y
populares son a1 = 1/2, a2 = 0 que dan como resultado
con error de truncamiento local 161 h 5 y (5) / 480 y a1 = 2/3, a2 = 1/3 que conduce a
con error de truncamiento local 707/h5y(5)/2160.
Es claro que se podrían usar estos dos parámetros independientes para reducir aún más el error de
truncamiento, incluso hasta el orden h7, pero otro factor que se considerará en breve indica que el error de trun­
camiento no es nuestro único problema. También es claro que son posibles otros tipos de predictor, quizá
utilizando un término yk-3, pero debemos limitarnos a la abundancia que ya tenemos.
19.26 Ilustre las posibilidades de otras fórmulas de corrector.
Las posibilidades son ilimitadas, pero supongamos que buscamos un corrector de la forma
para la cual el error de truncamiento local es del orden de h5. Pidiendo que el corrector sea exacto para y(x) = 1,
www.elsolucionario.org
320
MÉTODOS NUMÉRICOS
19
conducen a las cinco condiciones
que incluyen siete constantes desconocidas. Sería posible hacer este corrector exacto para aún más poten­
cias de x, disminuyendo todavía más, en esa forma, el error de truncamiento local. Sin embargo, los dos
grados de libertad se utilizarán para producir otras características deseables en vez del algoritmo resultan­
te. Con a0 = 0 y a1 =1 se demuestra que las constantes restantes son las del corrector de Milne:
Otra elección, que se asemeja en cierto grado con el predictor de Adams, implica hacer a1 = a2 = 0, lo
que produce la fórmula
Si a1 = 2/3, a2 = 1/3, entonces tenemos una fórmula que se asemeja a otro predictor que acaba de ilustrarse:
Incluso otra fórmula tiene a0 = a1 = 1/2, haciendo
Las diversas elecciones difieren un poco en sus errores de truncamiento.
19.27 Compare los errores locales de truncamiento de las fórmulas de predictor y corrector que acaban de
ilustrarse.
El método de la serie de Taylor puede aplicarse en la forma usual para producir las siguientes estima­
ciones del error:
Predictor:
Corrector
Predictor:
Corrector
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
321
En cada caso el error del corrector es considerablemente menor que el de su compañero predictor.
También es de signo opuesto, lo cual puede ser información útil en un cálculo. El menor error del corrector
puede explicarse por su linaje. Utiliza información relativa a yk+1, en tanto que el predictor debe saltar hacia
adelante a partir de y*. Esto explica además por qué el peso del cálculo cae sobre el corrector, utilizándose
el predictor sólo como un cebo.
Para cada par de fórmulas puede deducirse un término de corrección. Tomando el predictor de
Adams y el corrector abajo de él, surge el primer par de fórmulas. Procediendo del modo usual, consideran­
do sólo los errores de truncamiento locales y recordando que los resultados obtenidos de este modo deben
verse con un poco de excepticismo, encontramos
donde / es el valor exacto. Puesto que 19E1 = -251E2, tenemos que E2 = 19/270 (P - C). Éste es el término de
limpieza e / = C + 19/270 (P - C) es la extrapolación correspondiente al límite. Debe recordarse otra vez que
y(5) no tiene en realidad el mismo significado en ambas fórmulas, por lo que aún hay posibilidades de un
error considerable en esta extrapolación.
19.28 Aplique el método de Adams a y' = -xy 2 con y(0) = 2, empleando h = .2.
El método es ahora familiar, cada paso implica predicción y después, el uso iterativo de la fórmula del
corrector. El método de Adams utiliza el primer par de fórmulas del problema 19.27 y conduce a los resulta­
dos de la tabla 19.5.
Tabla 19.5
X
y (correcta)
y (predicha)
Error
y (corregida)
Error
0
1
2
3
4
5
6
7
8
9
10
2.000000
1.000000
.400000
.200000
.117647
.076923
.054054
.040000
.030769
.024390
.019802
1.000798
.400203
.200140
.117679
.076933
.054058
.040002
.030770
.024391
.019802
-789
-203
-140
-32
-10
-4
-2
-1
-1
1.000133
.400158
.200028
.117653
.076925
.054055
.040000
.030769
.024390
.019802
-133
-158
-28
-6
-2
-1
El comportamiento del error indica que h = .2 es adecuado con respecto a una precisión de seis lugares
para x grande, pero que un valor más pequeño de h (digamos .1) podría ser sensato al principio. La dismi-
www.elsolucionario.org
322
MÉTODOS NUMÉRICOS
19
nución del error se relaciona con el hecho (véase el problema 19.36) de que para este método el "error rela­
tivo" permanece acotado.
19.29 Demuestre que, para un h suficientemente pequeño, el uso iterativo de la fórmula del corrector produce una
sucesión convergente, y que el límite de esta sucesión es el valor único yk+1 que satisface la fórmula del
corrector.
Estamos buscando un número yk+1 con la propiedad
donde los puntos indican términos que contienen sólo resultados calculados previamente, y por ello inde­
pendientes de yk+1. Supongamos como es usual que f (x, y) satisface la condición de Lipschitz sobre y en
alguna región R. Después de esto definimos una sucesión
se han suprimido los k + 1 subíndices por simplicidad, por la iteración
y suponiendo que todos los puntos (xk+1 Y(1)) están en R. Restando encontramos
El empleo repetido de la condición de Lipschitz produce
Escogiendo ahora un h suficientemente pequeño para hacer |hcK| = r < 1, y considerando la suma
Para n tendiendo a infinito, la serie producida a la derecha está dominada (excepto por un factor) por la se­
rie geométrica 1 + r + r 2 +...y por eso converge. Esto prueba que Y(n) tiene un límite. Llámese este límite
Ahora, debido a la condición de Lipschitz,
y resulta que el lím
iteración
En consecuencia, podemos dejar que n tienda a infinito en la
y obtener de inmediato, como se requería,
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
323
Para probar la unicidad, supongamos que Zk+1 sea otro valor que satisface la fórmula del corrector en
x k+1 . Por tanto, como antes,
para / arbitraria. Puesto que |hcK | = r < 1, esto obliga a que Yk+1 = Zk+1. Observe que este resultado de
unicidad prueba que el Yk+1, correcto es independiente de Y(0), esto es, independiente de la elección de la
fórmula del predictor, al menos para h pequeño. En consecuencia, la elección del predictor es bastante li­
bre. Parece razonable utilizar un predictor de precisión comparable, a partir del punto de vista del error de
truncamiento local, con un corrector dado. Esto conduce también a un atractivo argumento de corrección.
Los apareamientos en el problema 19.27 mantienen estos factores en mente, así como algunos factores es­
téticos simples.
CONVERGENCIA DE LOS MÉTODOS DE PREDICTOR-CORRECTOR
19.30 Muestre que el método modificado de Euler es convergente.
En este método la fórmula simple de Euler se utiliza para realizar una primera predicción de cada va­
lor yk+1, pero después la aproximación real se encuentra mediante la fórmula modificada
La solución exacta satisface una relación similar con un término del error de truncamiento. Denominando la
solución exacta y(x) como antes, tenemos
habiéndose evaluado el término del error de truncamiento en el problema 19.15. Sustrayendo y utilizando dk
para y(xk) - yk, tenemos
siempre que supongamos la condición de Lipschitz, lo que hace
con un resultado similar en el argumento k + 1. El número B es una cota para | y(3)(x) |, el cual también su­
pusimos que existia. Nuestra desigualdad puede escribirse además como
Suponga que no hay error inicial (d0 = 0) y considere también la solución de
www.elsolucionario.org
324
MÉTODOS NUMÉRICOS
19
con valor inicial D0 = 0. Para propósitos de inducción suponemos | dk | ≤ Dk y encontramos como una con­
secuencia
de modo que | dk+1 ,| ≤ D k+1. Puesto que d0 = D0 la inducción se completa y garantiza que |dk| ≤ Dk para en­
teros positivos k. Para encontrar D* resolvemos la ecuación de diferencias y encontramos la familia de solu­
ciones
con C una constante arbitraria. Para satisfacer la condición inicial D0 = 0, debemos tener C = (h2B/12L) por
lo que
Para probar la convergencia en un argumento fijo xk = x0 + kh debemos investigar el segundo factor, ya que
cuando h tiende a cero k se incrementará indefinidamente. Pero como
tenemos
De tal modo cuando h tiende a cero, lim Yk = y(xk), el cual es el significado de la convergencia. Nuestro re­
sultado brinda además una medida de la manera en la que se propagan los errores de truncamiento a tra­
vés del cálculo.
19.31 Pruebe la convergencia del método de Milne.
La fórmula del corrector de Milne es esencialmente la regla de Simpson y proporciona los valores
aproximativos
La solución exacta y(x) satisface una relación similar, pero con un término del error de truncamiento
con ξ entre xk-1 y xk+1 Restando y utilizando dk = y(xk) - yk1.
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
325
con la condición de Lipschitz implicada otra vez y B una cota sobre y(5)(x). Se vuelve a escribir la desigual­
dad como
comparamos con la ecuación en diferencias
Supongamos errores iniciales de d0 y d1. Buscaremos una solución Dk tal que d0 < D0 y d1 < D1 . En
tal solución dominará |dk|, esto es, tendrá la propiedad |dk| < Dk para enteros k no negativos. Esto puede
probarse mediante inducción como en el problema anterior, porque si asumimos | dk-1| ≤ Dk-1 - y | dk | < Dk
encontramos también de inmediato que | dk+1 | ≤ Dk+1, y la inducción ya se ha completado. Para encontrar
la solución requerida, la ecuación característica
puede resolverse. Es fácil descubrir que una raíz es un poco mayor que 1, digamos r1, y la otra se encuen­
tra en la vecindad de - 1 , digamos r2. En forma más específica,
La ecuación homogénea asociada se resuelve por medio de la combinación de las potencias k-ésimas de
estas raíces. La propia ecuación no homogénea tiene la solución constante -h 4B/ 180L. Y asi tenemos
Dejemos que E sea el más grande de los números d0 y d1. En consecuencia.
será una solución con las características iniciales requeridas. Tiene D0 = E, y puesto que 1< r1, crece esta­
blemente. Así
Si no tenemos un error inicial, entonces d0 = 0. Si además cuando h se hace más pequeño mejoramos
nuestro valor Y1 (el cual puede obtenerse mediante algún otro método tal como la serie de Taylor) de modo
que d1 = 0(h), entonces tenemos E = 0(h) y cuando h tiende a cero así sucede con dk. Esto prueba la con­
vergencia del método de Milne.
www.elsolucionario.org
326
MÉTODOS NUMÉRICOS
19
19.32 Generalizando los problemas anteriores, demuestre la convergencia de los métodos basados en la fórmula
del corrector
Hemos elegido los coeficientes disponibles para hacer el error de truncamiento de orden h5. Supo­
niendo que éste sea el caso, la diferencia dk = y(xk) - Yk se encuentra mediante el procedimiento que se
acaba de emplear para el método de Milne con el fin de satisfacer
donde T es el término del error de truncamiento. Este corrector requiere tres valores iniciales, determinados
quizá por la serie de Taylor. Llámese £ al error máximo de estos valores, por lo que |dk| < E para k = 0 , 1 ,
2. Consideremos también la ecuación de diferencias
Buscaremos una solución que satisfaga E ≤ Dk para k - 0, 1, 2. Tal solución dominará a |dk|. Suponiendo
| d k - i | ≤ Dk-i para i = 0, 1, 2 tenemos de inmediato |dk+1| ≤ Dk+1. Esto completa una inducción y demues­
tra que | d k | ≤ Dk para enteros no negativos k. Para encontrar la solución requerida observamos que la
ecuación característica
tiene una raíz real mayor que uno. Esto resulta puesto que en r - 1 el lado izquierdo se convierte en
que con certeza es negativo puesto que a0 +a1 + a2 = 1, en tanto que para r grande el lado izquierdo es se­
guramente positivo si elegimos un h lo bastante pequeño para conservar 1 - |c| hL positivo. Denomínese
como r1 la raíz en cuestión. Entonces una solución con las características requeridas es
puesto que en k = 0 esto se vuelve E y cuando k aumenta ella crece aún más. De tal modo
Cuando h tiende a cero el error de truncamiento T tiende a cero. Si arreglamos también que los errores ini­
ciales tiendan a cero, entonces lím y(yk) = Yk y se prueba la convergencia.
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
327
ERROR Y ESTABILIDAD
19.33 ¿Qué se entiende por un método estable para la solución de ecuaciones diferenciales?
La idea de estabilidad se ha descrito de muchas maneras. En forma general, un cálculo es estable si
no "explota", aunque lo anterior difícilmente sería apropiado como una definición formal. En la introducción
a este capítulo la estabilidad se definió como el acotamiento del error relativo y sin duda esto sería una ca­
racterística deseable para un algoritmo. El deterioro gradual del error relativo equivale a la pérdida gradual
de dígitos significativos, los cuales será difícil recuperar. El problema existe, y a la larga el error relativo se
deteriora. Un sencillo ejemplo puede ser útil para aclarar lo anterior. Consideremos el método de Euler mo­
dificado.
Aplicándolo a un problema trivial
para el cual la solución exacta es y - eAX. La fórmula de Euler se convierte en
que es una ecuación en diferencias de primer orden con solución
Para una h pequeña esto se acerca a
brindándonos una prueba intuitiva de convergencia. Pero nuestro objetivo aquí apunta en otra dirección. La
solución exacta satisface
donde T es el error de truncamiento -h3A3y(ξ)/12 . Restando, y usando dk = y(xk) - yk, encontramos la ecua­
ción similar
para el error dk. Dividimos ahora entre (1 - 1/2 Ah)yk+1 y suponemos Ah pequeño para obtener
para el error relativo Rk = yk / y(xk). Al resolver
www.elsolucionario.org
328
MÉTODOS NUMÉRICOS
19
se indica que el error relativo crece como xk o linealmente, cuando avanza el cálculo. Esto puede estar ale­
jado de una explosión, pero tampoco es un caso de error relativo que permanece acotado.
Considerando otro criterio, observaremos el progreso de un error único conforme penetra en el proceso de
solución, digamos, un error inicial d0. Suponiendo que no se cometen otros errores, omitimos T y tenemos
que hace el error relativo Rk = dk /eAkh ≈ d0. Así que el efecto de largo alcance de un único error es una imita­
ción del comportamiento de la propia solución. Si A es positiva, el error y la solución crecen en la misma
proporción; en tanto que si A es negativa, disminuyen en la misma proporción. En ambos casos el error re­
lativo se mantiene firme. El crecimiento lineal predicho antes indica que este enfoque es un poco optimista,
pero al menos no se pronostica una explosión. Por algunas definiciones esto basta para considerar estable
el algoritmo de Euler. Esta utilización libre e informal del término puede ser conveniente.
Persiste la pregunta de cómo debe ser un Ah pequeño para justificar las aproximaciones hechas en
estos argumentos. Puesto que la verdadera solución es monótona, parece aconsejable mantener el valor
de (1 + 1/2 Ah)/ (1 -1/2 Ah) positivo. Esto es cierto sólo para Ah entre -2 y 2. La prudencia sugiere mantenerse
lejos de estos dos extremos.
19.34 Analice el comportamiento del error en la fórmula del corrector de Milne.
Eligiendo otra vez la ecuación especial y' - Ay, se encuentra fácilmente que el error dk satisface la
ecuación de diferencias de segundo orden
para la cual la ecuación característica es (véase el capítulo 18)
Las raíces son
lo que hace
Ahora es posible ver el efecto de largo alcance del error inicial d0. Si A es positiva, entonces dk se comporta
de modo muy similar a la solución correcta eAhk, puesto que el segundo término tiende a cero. En efecto, el
error relativo puede estimarse como
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
329
que se acerca a una constante. Sin embargo, si A es negativa, el segundo término no desaparece. En reali­
dad éste se vuelve rápidamente el término dominante. El error relativo llega a ser una oscilación no acotada
y el cálculo se torna sin sentido más allá de cierto punto.
Se afirma que el método de Milne es estable para A positiva e inestable para A negativa. En este se­
gundo caso la "solución" calculada verdaderamente explota.
19.35 ¿Los cálculos efectuados antes confirman estas predicciones teóricas?
Haciendo referencia otra vez a la tabla 19.4 pueden calcularse los siguientes errores relativos. Aun­
que la ecuación y' - -xy 2 no es lineal, su solución es decreciente, como la de una ecuación lineal para/)
negativa. La oscilación en los datos anteriores es aparente. El crecimiento sustancial del error relativo tam­
bién es aparente.
Xk
dk/yk
1
2
3
4
5
6
7
8
9
10
-.0001
.0001
-.0005
.0013
-.0026
.0026
-.0075
.0117
-.0172
.0247
19.36 Analice el comportamiento del error para el corrector de Adams.
El proceso usual en este caso conduce a
Ignorando T intentamos descubrir cómo se propagaría un error solitario, en particular cuál sería su efecto
sobre el error relativo en un proceso de cálculo largo. El primer paso es también considerar las raíces de la
ecuación característica.
Esta ecuación tiene una raíz cerca de 1, que puede comprobarse que es r1 ≈ 1 + Ah. Si está raíz se elimina,
el factor cuadrático
permanece. Si Ah fuera cero esta ecuación cuadrática tendría una doble raíz en cero. Para Ah diferente de
cero pero pequeña, las raices, denominadas r2 y r3, seguirán estando cerca de cero. En realidad para un va­
lor de Ah positivo y pequeño, las raíces son complejas con módulo |r| ≈ √ A h / 2 4 , en tanto que para Ah
pequeño y negativo, son reales y aproximadamente + √ - 6 A h / 1 2 . De cualquier modo tenemos
www.elsolucionario.org
19
MÉTODOS NUMÉRICOS
330
para Ah pequeño. Después de esto la solución de la ecuación en diferencias puede escribirse como
La constante c1 depende del error solitario que se ha supuesto. Dividiendo entre la solución exacta, encon­
tramos que el error relativo permanece acotado. El corrector de Adams es, por tanto, estable tanto para A
positiva como negativa. Un error aislado no arruinará el cálculo.
19.37 ¿Los cálculos efectuados antes confirman estas predicciones teóricas?
Refiriéndonos otra vez a la tabla 19.5, pueden calcularse los siguientes errores relativos:
Xk
1
2
3
4
5
6
7 a 10
dk/yk
-.00013
-.00040
-.00014
-.00005
-.00003
-.00002
cero
Como se predijo, los errores están disminuyendo, incluso el error relativo. También en este caso los resulta­
dos que se obtienen para un problema lineal demuestran ser informativos en torno al comportamiento de
los cálculos en un problema no lineal.
19.38 ¿Qué son las soluciones parásitas y cuál es su conexión con la idea de estabilidad computacional que
soporta los problemas precedentes?
Los métodos en cuestión implican sustituir una ecuación en diferencias por la ecuación diferencial, y
en el caso y' = Ay es un ecuación en diferencias que es lineal con coeficientes constantes. Por tanto, su so­
lución es una combinación de términos de la forma rik con ri, las raíces de la ecuación característica. Una de
estas raíces será r1 = 1 + Ah, con excepción de los términos de mayor grado en h, y r1K estará, entonces,
cerca de eAHk = eAx cuando h sea pequeño. Ésta es la solución que queremos, la única que converge a la
solución diferencial. Otras componentes, correspondientes a las otras ri se denominan soluciones parási­
tas. Son el precio que se paga por el error de truncamiento menor que producen métodos tales como el de
Milne y el de Adams.
Si los términos parásitos son dominados por el término r1 entonces su contribución será despreciable
y el error relativo permanecerá aceptable. Si, por otra parte, una solución parásita se vuelve dominante,
arruinará el cálculo. En el problema 19.33, para el método de Euler modificado, la ecuación en diferencias
importante tiene sólo la raíz
Ahí no hubo soluciones parásitas. En el problema 19.34, el método de Milne nos ofreció
hasta los términos en h2. Para A > 0, r1, domina, pero para A > 0, r1 es la que se hace cargo y la solución
deseada se oculta. En el problema 19.36, con excepción de la usual r1 = 1 + Ah, encontramos dos términos
de solución parásita, ambos de tamaño próximo a Ah. Ambas son dominadas por el término r1 sin importar
que A sea positiva o negativa. El método de Adams significa cálculo estable en cualquier caso.
Estamos llegando a la conclusión de que para evitar una explosión computacional cualquier término
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
331
parásito debe ser dominado por el término principal, esto es, queremos
para i ≠ 1. Cualquier método en el que estas condiciones se violan se denomina inestable. De hecho, es
mejor que las desigualdades se satisfagan por un amplio margen.
.39 Aplique el método de Runge-Kutta de segundo orden
a y' - Ay. ¿Qué es lo que descubre en relación a la estabilidad de esta fórmula?
La sustitución de Ay por f(x, y) produce
haciendo
que es cercana a la verdadera solución yk = ekh - exk si Ah es pequeño. ¿Pero qué tan pequeño debe ser
Ah? La figura 19-5 proporciona una imagen de la ecuación cuadrática r = 1 + Ah + 1/2 A2h2. Cuando A es
positiva, r será más grande que 1, por lo que rk y ekh estarán creciendo. Por consiguiente, el comportamien­
to cualitativo de rk es correcto. Pero cuando A es negativa, queremos una solución decreciente, y esto ocu­
rrirá sólo si Ah está entre -2 y 0. Debajo de este intervalo la solución aproximada rk estará aumentando y
no tendrá ninguna semejanza con ekh Aquí no hay soluciones parásitas, ya que los métodos de Runge-Kut­
ta no alcanzan a regresar más allá de yk para efectuar su trabajo. La explosión del error relativo tiene un orígen diferente en la naturaleza de la propia raíz r1.
19.40 Aplique las fórmulas de Runge-Kutta de cuarto grado del problema 19.12 a y' = Ay. ¿En qué intervalo de
valores de Ah es la ecuación estable?
www.elsolucionario.org
MÉTODOS NUMÉRICOS
332
19
Con un poco de cuidado
en la cual se destaca la aproximación a eAh. Denotándola r, nuestra solución aproximada es otra vez yk - rk. En
la figura 19-6 aparece una gráfica de r contra Ah y, como con el método de segundo orden, sugiere que pa­
ra A positiva las soluciones verdaderas y aproximadas tendrán el mismo carácter, creciendo ambas en for­
ma estable. Pero para A negativa, justo como en el problema anterior, no hay una cota más pequeña deba­
jo de la cual los valores rk no seguirán la tendencia decreciente de la verdadera solución. En este caso esta
cota se encuentra cerca de -2.78. Para Ah más pequeño que el valor anterior, encontramos un r mayor que
uno y un cálculo explosivo.
Fig. 19-6
19.41 ¿De qué manera un análisis basado en la ecuación y' - Ay puede decirnos algo útil en relación con el
problema general y' = f(x, y)?
No hay realmente garantías, pero la ecuación general es demasiado difícil para tal análisis por lo que
la cuestión es intentar lo que sea posible. Una liga que puede establecerse entre los dos problemas es la
identificación de nuestra constante A con la derivada parcial fy, evaluada originalmente en la vecindad del
punto inicial (x0, y0), y después en otras regiones del plano a las cuales haya penetrado la solución. Si fy
cambia de signo a lo largo del camino, esperaríamos que la estabilidad del método de Milne reaccionara rá­
pidamente y que los métodos de Runge-Kutta mostraran también cierta sensibilidad.
19.42 Aplique el método de Runge-Kutta de cuarto orden a la ecuación no lineal y' = -100xy 2 con y(0) - 2. La
solución exacta es y = 2/(1 + 100x2). Pruebe la estabilidad para diferentes tamaños de paso.
Puesto que fy = 200xy = -400x/ (1 + 100x2), que es cero inicialmente pero asciende rápidamente
hasta -20 en x = . 1 , recordamos la condición de estabilidad
y decidimos probar valores de h alrededor de .14. Con h = .10 la solución computada decae exactamen­
te a .0197 en x = 1 y a .0050 en x - 2. Con h = .12, se observa un descenso similar. Pero con h = .13, tres
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
333
pasos nos llevan al valor poco satisfactorio -29.11, seguido por un overflow. Esta explosión definida justifica
nuestros esfuerzos para transferir nuestro criterio de estabilidad lineal al escenario no lineal.
19.43 ¿Qué puede hacerse para controlar el error de redondeo?
En un largo proceso de solución, el redondeo puede convertirse en un serio factor. Si se dispone de
aritmética de doble precisión, es probable que deba utilizarse, a pesar del gasto adicional. Éste puede ser el
único recurso. Hay un paso intermedio que puede ser útil si el uso de una mayor precisión en todo el proce­
so se considera que consume demasiado tiempo. A modo de ejemplo, muchas de nuestras fórmulas para
resolver ecuaciones diferenciales equivale a
con el término ∆yk pequeño comparado con el propio yk. Para efectuar la adición a la derecha, este pequeño
término de corrección tiene que correrse (para alinear los puntos binarios) y es aquí donde ocurren muchos
redondeos. Para evitarlos, los yk se almacenan en la precisión doble y esta adición se efectúa ahí mismo. El
trabajo de calcular Ayk, usualmente el más arduo, se sigue haciendo con una precisión simple debido a que
se espera que este término sea pequeño de cualquier modo. En esta forma la doble precisión se emplea
sólo donde es muy necesaria.
M É T O D O D E AJUSTE, T A M A Ñ O D E PASO V A R I A B L E
19.44 ¿Cómo puede extenderse la idea de la integración ajustada, que se presentó en el problema 14.27, para
tratar ecuaciones diferenciales?
Suponga que la meta es resolver y' = f(x, y) en forma aproximada de un punto inicial x - a a un punto
terminal x = b, concluyendo con un error no mayor que e. Supongamos que el error se acumulará linealmente, por lo que sobre un paso de longitud h podemos tolerar un error de tamaño eh/(b - a). Ésta es preci­
samente la idea de la integración ajustada que se empleó antes. Dejemos que T sea una estimación del
error de truncamiento hecho al tomar un paso de longitud h. Entonces si T no excede eh/(b - a), se acepta
este paso y nos movemos al siguiente. De otro modo, el tamaño del paso se reduce (a .5h o una alternativa
apropiada) y el proceso se repite. Con un método convergente los requerimientos se alcanzarán a la larga,
siempre que el tamaño del paso h no se vuelva tan pequeño que el redondeo se convierta en la fuente de
error dominante.
Si se está utilizando el método predictor-corrector de Milne, entonces el problema 19.20 brinda la esti­
mación del error de truncamiento necesario (P-C )/29 y la condición para que sea admisible es
que se calcula fácilmente a partir de ingredientes disponibles. Si se está empleando el método de Adams,
entonces el problema 19.27 conduce a la condición similar de aceptación
En cualquier caso, el rechazo requerirá reactivar el proceso suplementario de arranque.
www.elsolucionario.org
334
MÉTODOS NUMÉRICOS
19
19.45 Para hacer los métodos de Runge-Kutta de ajuste, se necesita una manera práctica de estimación del error
de truncamiento local. Desarrolle una estimación de tal tipo, que no incluya derivadas de alto orden de y(x).
Se utilizará la idea, ahora familiar, de la comparación de errores de tamaño h y 2h. Consideremos el
método clásico de cuarto orden y hagamos un paso de tamaño 2h partiendo de la posición actual xk. El
error local es aproximadamente
Después de esto se cubre el mismo intervalo en dos pasos de tamaño h. El error combinado es alrededor
de
conduciendo a estas dos estimaciones del valor yk+2:
Los subíndices 2h y h indican los tamaños de paso utilizados en la obtención de las dos aproximaciones. La
sustracción produce ahora el valor C y la estimación del error
que puede duplicarse en el proceso completo hacia adelante. Esta estimación supone que Ch5 es una me­
dida de error apropiada y que C (con la inclusión de las derivadas de mayor orden) no cambió mucho sobre
el intervalo.
19.46 Utilice la estimación del error del problema anterior para hacer variable el método de Runge-Kutta.
Dejemos que en el intervalo (a, o) el error permisible sea e. Para que éste se distribuya en forma pro­
porcional, pedimos que entre xk y xk+2 el error local no exceda 2eh/(b - a). Si 2Th como acaba de estimarse
no excede este último valor, esto es, si
el valor Ah puede aceptarse en x k+2 y se continúa. De otro modo un tamaño de paso h * más pequeño se
necesita de manera que el nuevo error de truncamiento Th sea apropiado. Retornando al hecho básico, su­
ponemos
sin que exceda el último h*e/(b - a) en magnitud. Juntando las piezas, se determina el nuevo tamaño de pa­
so.
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
335
En vista de las diferentes suposiciones hechas en la obtención de esta fórmula, se sugiere que ésta no sea
llevada al límite. Un factor de seguridad de .8 suele incluirse. Además, si h es ya bastante pequeño y Th pe­
queño con él, el cálculo de h* puede, incluso, causar un overflow. La fórmula debe emplearse con discre­
ción.
19.47 ¿Qué métodos son mejores para el cálculo adaptativo, los predictor-corrector o el Runge-Kutta?
Los métodos de predictor-corrector tienen la ventaja de que los ingredientes para estimar el error local
están a la mano cuando se necesitan. Con el método de Runge-Kutta debe efectuarse una aplicación por
separado de las fórmulas, como acaba de describirse. Esto casi duplica el número de veces que f(x, y) tiene
que evaluarse, y puesto que ahí es donde se hace el mayor esfuerzo de cálculo, el tiempo del procedimien­
to casi se duplica. Por otra parte, y como se dijo antes, siempre que se cambia el tamaño del paso será ne­
cesario apoyar un método de predictor-corrector al efectuar el reinicio. Esto significa programación extra, y
si se prevén cambios frecuentes, puede resultar adecuado usar también el método de Runge-Kutta en todo
el proceso.
19.48 Intente variar el paso en el método clásico de Runge-Kutta cuando resuelva el problema.
y' = -xy2
y(0) = 2
para el cual tenemos la solución exacta y = 2/(1 + x2).
La solución empieza con un giro hacia abajo relativamente agudo, después se nivela en forma gra­
dual y se vuelve muy uniforme. De modo que prevemos la necesidad de un tamaño de paso pequeño al ini­
cio y una relajación gradual cuando el procedimiento avance. Es interesante observar estas expectativas
desarrolladas en una corrida de hasta x - 27.
X
.15
1
2
3
4
9
12
17
27
h
.07
.05
.1
.2
.3
.9
1.4
2.7
4.3
19.49 ¿Cuáles son los métodos de orden variable?
La variación del orden de las fórmulas usadas en la integración de una ecuación diferencial es otra
forma de intentar alcanzar un nivel determinado de precisión con un mínimo de cómputo. Empezando por
una fórmula de bajo orden para hacer que el proceso pueda iniciarse por sí solo, y con un tamaño de paso
pequeño para mantenerlo preciso, se ajustan ambos conforme avanza el cálculo. La idea es encontrar un
orden y un tamaño de paso óptimos para el paso que se realiza. Se dispone de varios programas profesio­
nales para llevar a cabo lo anterior, todos un poco complejos, aunque la estrategia fundamental es similar a
la de los problemas 19.44 a 19.46.
ECUACIONES RÍGIDAS
19.50 ¿Qué es una ecuación diferencial rígida?
El término suele asociarse con un sistema de ecuaciones, pero puede, en principio, ilustrarse en un
www.elsolucionario.org
336
MÉTODOS NUMÉRICOS
19
nivel más simple. Considerando la ecuación
que tiene la solución
la cual satisface la condición inicial y(0) = 0. Ambos términos de esta solución tienden a cero, pero el punto
es que el segundo decae mucho más rápido que el primero. En x = . 1 , este término es en realidad cero has­
ta en cuatro lugares decimales. Es verdaderamente un término transitorio comparado con el primero, el cual
casi podría llamarse "estado estable". Los sistemas en los que operan componentes diferentes en escalas
de tiempo por completo distintas, se denominan sistemas rígidos y ofrecen más que una resistencia normal
a la solución numérica.
19.51 En vista del rápido decaimiento del término transitorio anterior, podría esperarse un tamaño de paso de h = .1
para generar valores del término remanente e-x. ¿Qué es lo que realmente produce el método clásico de
Runge-Kutta?
Como en el problema 19.42, tenemos fy = -100 y la asociamos con la A de nuestro criterio de estabili­
dad, que se convierte en
e indica que mantendremos el tamaño del paso h menor que .0278. Esto es algo sorpresivo porque parece
implicar que el término transitorio, de tamaño despreciable después de x = . 1 , puede aún afectar el cálculo
de manera importante y oscura. Poniendo a prueba la teoría, se efectuó una corrida con h = .03. La explo­
sión predicha ocurrió, los valores de y descendieron rápidamente a la vecindad de -10 14 . Pero al usar h .025 se logró una corrida exitosa, que produjo .04980 en x = 3. Sólo una unidad arriba en el quinto lugar.
19.52 Desarrolle la fórmula de Gear
donde
es el operador de diferencias hacia atrás. Muestre que esto es equivalente a
donde
Empezando con la fórmula regresiva de Newton
(véase el problema 7.9) en el cual x - xn+1= kh y pk es un polinomio de tercer grado en k colocado con y en
k = 0, - 2 , - 3 , diferenciamos y dejamos k = 0
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
337
Adoptando esto como una aproximación a y'n+1, tenemos ya la primera fórmula de Gear. La segunda se ob­
tiene fácilmente sustituyendo las diferencias hacia atrás con sus equivalentes en términos de las yi.
Estas fórmulas también pueden encontrarse mediante el método de coeficientes indeterminados, requiriéndose exactitud para ios polinomios de hasta tercer grado. Por extensión, se dispone de fórmulas co­
rrespondientes de mayor orden. Por ejemplo, si la fórmula de Newton se extiende hacia atrás hasta k= -4,
al lado izquierdo de la expresión an­
al introducir el cuarto término de diferencia, entonces se suma
terior.
19.53 ¿Por qué son preferibles las fórmulas de Gear para resolver las ecuaciones rígidas?
Se demuestra que dichas ecuaciones son más estables para los valores más grandes de h que nues­
tras demás fórmulas. Consideremos otra vez la ecuación del problema 19.50. Hemos encontrado inestable
el método de Runge-Kutta para h - .03. En contraste, la fórmula de Gear se reduce ahora a
por la inclusión de y' a partir de la ecuación y resolviendo para yn+1. Con h =.1, ésta genera (empleando
tres valores iniciales correctos)
X
2
4
6
y
.135336
.018316
.002479
el primero de los cuales se encuentra una unidad arriba en el lugar final. Incluso h = .5 puede considerarse
un éxito modesto.
X
2
4
6
y
.1350
.01833
.002480
El valor mayor de h produce más error de truncamiento pero no hay motivo de queja en cuanto a la estabili­
dad.
19.54 Las fórmulas de Gear suelen ser no lineales en yn+1. Desarrolle la iteración de Newton cuando se aplique a
la extracción de esta incógnita.
En el ejemplo anterior f(x, y) no era lineal en y, permitiendo una solución directa para yn+1. Sin embar­
go, en general, debemos ver la fórmula de Gear como
www.elsolucionario.org
338
MÉTODOS NUMÉRICOS
19
Problemas suplementarios
19.55 Considerando el campo de dirección de la ecuación y' = x2 - y2, deduzca el comportamiento cualitativo de
sus soluciones. ¿En dónde tendrán las soluciones máximos y mínimos? ¿Dónde tendrán curvatura cero?
Muestre que para x grande y positiva debemos tener y(x) < x.
19.56 Para la ecuación del problema anterior trate de estimar en forma gráfica dónde estará la solución a través
de(-1,1) para x = 0.
19.57 Considerando el campo de dirección de la ecuación y' = -2xy, deduzca el comportamiento cualitativo de
sus soluciones.
19.58 Aplique el método simple de Euler a y' = -xy 2 , y(0) = 2, calculando hasta x = 1 con unos cuantos intervalos
h tales como .5, .2, . 1 , .01. ¿Convergen los resultados hacia el valor exacto y(1) = 1 ?
19.59 Aplique la fórmula del "punto medio" a yk+1 ≈ yk-1 + 2hf(xk,yk) a y' = -xy 2 , y(0) = 2, empleando h = .1 y
comprobando el resultado y(1) ≈ .9962.
19.60 Aplique el método modificado de Euler a y' - -xy 2 , y(0) = 2 y compare las predicciones de y(1) obtenidas en
los últimos tres problemas. ¿Cuál de estos simples métodos está funcionando mejor para el mismo intervalo
h? ¿Puede usted explicar por qué?
19.61 Aplique el método de Taylor a la solución de y' = -xy 2 , y(0) = 2, empleando h = .2. Compare sus resultados
con aquéllos de los problemas resueltos.
19.62 Aplique el método de Runge-Kutta al problema anterior y compare otra vez los resultados.
19.63 Compruebe el primer enunciado del problema 19.9.
19.64 Aplique el método predictor-corrector de Milne a y ' = xy1/3, y(1) = 1, empleando h = . 1 . Compare los resultados con los correspondientes de los problemas resueltos.
19.65 Aplique el método predictor-corrector de Adams al problema anterior y compare los resultados.
19.66 Aplique dos o tres combinaciones de predictor-corrector al problema 19.64. ¿Hay algunas diferencias sustanciales en los resultados?
19.67 Aplique diferentes métodos a y' = x2 - y2, y(-1) = 1. ¿Cuál es el valor de y(0) y qué tan cercana fue la
estimación que obtuvo en el problema 19.56?
19.68 ¿Aplique diversos métodos a y' = -2xy, y(0) = 1. ¿Cómo se comparan los resultados con la solución exacta y = e-x2 ?
19.69 Muestre que el método de Milne aplicado a y' = y con y(0) = 1, empleando h = .3 y llevando cuatro lugares
decimales, conduce a los siguientes errores relativos:
www.elsolucionario.org
19
339
ECUACIONES DIFERENCIALES
X
Error relativo
1.5
3.0
4.5
6.0
.00016
.00013
.00019
.00026
Esto significa que el cálculo ha producido en forma estable casi cuatro dígitos significativos.
19.70 Muestre que el método de Milne aplicado a y' = -y con y(0) = 1, usando h = .3 y llevando cinco lugares
decimales, conduce a los siguientes errores relativos:
X
1.5
3.0
4.5
6.0
0
-.0006
.0027
-.0248
Error relativo
Aunque se producen casi cuatro lugares decimales correctos, el error relativo ha empezado su oscilación
creciente.
19.71 Demuestre la inestabilidad del método del punto medio.
Muestre que esta fórmula tiene un error de truncamiento más pequeño que el del método de Euler, lo que
satisface la solución exacta
y k + 1 = yk-1, + 2hf(xk, yk) +h3y(3)(ξ)
Para el caso especial f(x, y) = Ay, muestre que
dk+1 = dk-1, +2hAdk
ignorando el término del error de truncamiento con el fin de centrar otra vez el efecto de largo alcance de un
sólo error d0. Resuelva esta ecuación en diferencias probando que las raíces de r2 - 2hAr -1 = 0 son
r = hA± √h2A2 + 1 = hA± + 0(h2)
Para hA pequeño los valores de las mismas están próximos aehA y - e h A yla solución es
dk = c1(1 + Ah)k + c 2 (-1) k (1 - Ah)k ≈ c1 eAhk+ c2(-1)ke-Ahk
Dejando k = 0, muestre que d0 = c1 + c2. Dividiendo entre yk, el error relativo se vuelve
Demuestre que para A positiva éste permanece acotado, pero que el caso de A negativa crece sin cota
cuando k aumenta. En consecuencia, es inestable en este caso.
19.72 Los resultados en la tabla 19.6 se obtuvieron aplicando el método del punto medio a la ecuación y' = -xy2
con y(0) = 2. Se utilizó el intervalo h = .1 pero se anotan los valores para x = .5(.5)5. Esta ecuación no es
www.elsolucionario.org
19
MÉTODOS NUMÉRICOS
340
lineal, pero calcula el error relativo de cada valor y descubre la oscilación rápidamente creciente que
pronostica el análisis del problema lineal anterior.
Tabla 19.6
xk
yk calculado
yk exacto
xk
yk calculado
yk exacto
.5
1.0
1.5
2.0
2.5
1.5958
.9962
.6167
.3950
.2865
1.6000
1.0000
.6154
.4000
.2759
3.0
3.5
4.0
4.5
5.0
.1799
.1850
.0566
.1689
-.0713
.2000
.1509
.1176
.0941
.0769
19.73 Analice el error relativo correspondiente a las otras fórmulas de corrector que se listan en el problema
19.27.
19.74 Muestre que la fórmula
tiene el error de truncamiento h 5 y ( 5 ) (ξ)/ 720, en tanto que el predictor similar
tiene el error de truncamiento 31h5y5(5)(ξ)6!. Estas fórmulas utilizan valores de la segunda derivada para re­
ducir el error de truncamiento.
19.75 Aplique las fórmulas del problema anterior a y' = -xy2, y(0) = 2, empleando h = .2. Se requiere un valor ini­
cial adicional y puede tomarse de cualquier solución anterior de la misma ecuación, por ejemplo, la serie de
Taylor.
19.76 Como un caso de prueba calcule y(π/2), dada
métodos de aproximación.
empleando cualquiera de nuestros
19.77 Utilice cualquiera de nuestros métodos de aproximación para encontrar y(2), dada y' = x- y, y(0) = 2.
19.78 Resuelva mediante cualquiera de nuestros métodos de aproximación
19.79 Resuelva mediante cualquiera de nuestros métodos de aproximación
19.80 Resuelva mediante cualquiera de nuestros métodos de aproximación
www.elsolucionario.org
19
ECUACIONES DIFERENCIALES
341
19.81 Un objeto que cae hacia la Tierra avanza, considerando sólo la atracción gravitacionaf de la Tierra, en la
teoría newtoniana, de acuerdo con la ecuación (véase también el problema 20.16)
donde y = distancia desde el centro de la tierra, g - 32, R - 4000(5280), y H = distancia inicial desde el cen­
tro de la Tierra. Puede demostrarse que la solución exacta de esta ecuación es
siendo cero la velocidad inicial. No obstante, aplique uno de nuestros métodos de aproximación a la propia
ecuación diferencial con la condición inicial y(0) = H = 237 000(5280). ¿En qué instante se tiene y - R? Este
resultado puede interpretarse como el tiempo requerido por la Luna para caer en la Tierra si ésta se detu­
viera en su curso y la Tierra permaneciera estacionaría.
19.82 Una gota de agua de masa m tiene velocidad v después de caer durante un tiempo t. Suponga que la
ecuación de movimiento es
donde C es una medida de la resistencia del aire. Puede demostrarse entonces que la velocidad se aproxi­
ma a un valor límite. Confirme este resultado directamente aplicando uno de nuestros métodos de apro­
ximación a la propia ecuación diferencial para el caso c/m = 2. Use cualquier velocidad inicial.
19.83 Se efectúa un disparo hacia arriba contra la resistencia del aire de cv2. Suponga que la ecuación de
movimiento es
Si c/m = 2 y v(0) = 1, aplique uno de nuestros métodos para encontrar el tiempo requerido para que el dis­
paro alcance la altura máxima.
Fig. 19-7
www.elsolucionario.org
342
MÉTODOS NUMÉRICOS
19
19.84 Un extremo de una cuerda de longitud L se mueve a lo largo de una linea recta. La trayectoria del peso
unido al otro extremo está determinada por (véase la Fig. 19-7)
Puede determinarse la solución exacta. Sin embargo, utilice uno de nuestros métodos de aproximación para calcular la trayectoria del peso, iniciando desde (0, L). Considerar L = 1.
www.elsolucionario.org
Sistemas de ecuaciones
diferenciales
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el significado y la utilidad de los sistemas de ecuaciones
diferenciales (Introducción, Problemas 20.7, 20.11,20.12, 20.16).
2. Mencionar cuando menos cinco métodos para resolver sistemas de ecuaciones diferenciales
ordinarias (Introducción, Capítulo 19).
3. Explicar con sus propias palabras en qué consiste el método estándar para que se pueda reemplazar
una ecuación diferencial de alto orden por un sistema de ecuaciones de primer orden para
resolver sistemas de ecuaciones diferenciales ordinarias y aplicarlo en los problemas propuestos
(Problemas 20.4 a 20.6).
4.
Explicar con sus propias palabras en qué consiste el método de Taylor para resolver sistemas de
ecuaciones diferenciales ordinarias y aplicarlo en los problemas propuestos (Introducción, Problemas
20.1, 20.8, 20.9, 20.18, 20.19).
5. Explicar con sus propias palabras en qué consisten los métodos de Runge-Kutta para resolver
sistemas de ecuaciones diferenciales ordinarias y aplicarlos en los problemas propuestos
(Introducción, Problemas 20.2, 20.7, 20.11 a 20.13, 20.16, 20.20).
6. Explicar con sus propias palabras en qué consiste el método de Milne para resolver sistemas de
ecuaciones diferenciales ordinarias y aplicarlo en los problemas propuestos (Problema 20.15).
7. Explicar con sus propias palabras en qué consiste el método de Adams para resolver sistemas de
ecuaciones diferenciales ordinarias y aplicarlo en los problemas propuestos (Problemas 20.3, 20.14,
20.17).
8. Explicar con sus propias palabras en qué consiste el método de Gear para resolver sistemas de
ecuaciones diferenciales ordinarias y aplicarlo en los problemas propuestos (Problema 20.10).
APLICACIONES DE LOS SISTEMAS DE ECUACIONES DIFERENCIALES
Este capítulo es complementario del capítulo 19, en el cual se expone ampliamente la teoría y la práctica para resolver ecuaciones diferenciales mediante métodos numéricos, sin embargo, en un momento dado podremos tener
ecuaciones diferenciales de alto orden o llamadas también de órdenes superiores que reemplazaremos por
sistemas de ecuaciones de primer orden y por lo tanto los métodos conocidos tratados en el capítulo 19, se aplicarán a estos sistemas.
Como lo mencionamos en el capítulo 19, son evidentes las aplicaciones de las ecuaciones diferenciales en
el enorme campo de los modelos matemáticos del mundo real, ya que en cualquier lugar donde se lleve a cabo
www.elsolucionario.org
344
MÉTODOS NUMÉRICOS
20
un proceso continuamente cambiante (dependiente del tiempo) (rapidez de variación de una variable con respecto a otra), suele resultar apropiado un modelo de ecuación diferencial.
Las ecuaciones diferenciales aparecen con mucha frecuencia en disciplinas muy diversas, tales como física atómica (tasa de dcscomposición de materiales radioactivos), química (tasa de cristalización de algún compuesto), ingeniería eléctrica (circuitos y redes), ingeniería mecánica (vibraciones, fuerzas), termodinámica
(flujo calorífico), biología (crecimiento bacteriológico), estadística (crecimiento poblacional), psicología, economía; asimismo desempeñan un papel importante en el estudio de los cuerpos celestes como planetas y satélites.
En la práctica una gran cantidad de ecuaciones diferenciales que tienen que ver con problemas en ingeniería, no se pueden resolver por los métodos tradicionales que se ven en los cursos de matemáticas o bien
cuando la evaluación de la solución analítica es muy complicada; éste es el momento de emplear métodos numéricos para su solución.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Análisis numérico
Manejo de ecuaciones
Ecuaciones en diferencias
Ecuaciones diferenciales
Sistemas de ecuaciones diferenciales
Álgebra no lineal y optimización
Raíces de ecuaciones
Ceros de polinomios
Método de descenso más rápido (gradiente)
Sistemas de ecuaciones lineales
Sistemas de ecuaciones lineales
Programación lineal
Solución de sistemas inconsistentes
Problemas con valores en la frontera
www.elsolucionario.org
1
18
19
20
25
25
25
26
27
28
29
20
SISTEMAS DE ECUACIONES DIFERENCIALES
345
EL PROBLEMA BÁSICO
Un sistema de ecuaciones diferenciales de primer orden tal como
para determinar las n funciones yi,(x), con las condiciones iniciales dadas y1(x0) = ai, es el problema básico que se
considerará en este capítulo. Se presenta en una amplia variedad de aplicaciones. Se trata de una generalización
directa del problema del valor inicial tratado en el capítulo 19, se hace especialmente evidente al cscribirlo en la
forma vectorial
donde Y, F y A tienen componentes, yi fi y ai , respectivamente.
Una ecuación de mayor orden puede ser sustituida por tal sistema de ecuaciones de primer orden y éste es
un método estándar de tratamiento. Como el ejemplo más simple, la ecuación de segundo orden
y"=f(x,y,y')
se convierte en el sistema
y' = p
p' = f(x, y, p)
para las dos funciones y y p. Las condiciones iniciales acompañantes y(x0) = a, y'(x0) = b son sustituidas por y(x0) =
a y p(x0) = b. En esas condiciones se domina el problema anterior. Con una ecuación de tercer orden, las definiciones y = p y y" = q conducen de inmediato a un sistema de tres ecuaciones de primer orden, y así sucesivamente.
Los sistemas de ecuaciones de mayor orden se manejan tratando cada uno de la manera que acaba de dcscribirse. De esta manera se dispone de una opción para reducir cualquier problema de mayor orden a un sistema de
ecuaciones de primer orden.
MÉTODOS DE SOLUCIÓN
Los métodos del capítulo anterior se extienden fácilmente a sistemas de ecuaciones de primer orden. Las
series de Taylor con frecuencia resultan apropiadas, siendo bastante directa su aplicación.
También se aplican los métodos de Runge-Kutta, donde cada ecuación del sistema se trata casi exactamente como en el capítulo 19. Lo mismo es cierto para los métodos predictor-corrector. En los problemas resueltos se
presentarán ejemplos de tales extensiones.
Problemas resueltos
20.1
ilustre el procedimiento de la serie de Taylor para ecuaciones simultáneas resolviendo el sistema
x' = - x- y
y' = x- y
para la, dos funciones x(f) y y(t) que satisfacen las condiciones iniciales x(0) = 1, y(0) = 0.
www.elsolucionario.org
346
MÉTODOS NUMÉRICOS
20
Sustituimos directamente en las dos series
obteniendo los ingredientes necesarios del sistema dado. Primero x'(0) = -1 y y'(0) = 1. Entonces de x" = -x' y' y y" = x' - y' resulta x"(0) = 0, y"(0) = - 2 . Las derivadas de mayor orden se obtienen de la misma mane­
ra. La serie empieza del modo siguiente:
El sistema dado no es sólo lineal sino que también tiene coeficientes constantes. Escribiéndolo en la
forma
con
la solución exacta puede encontrarse probando
La sustitución en el sistema conduce a un problema de valores característicos para la matriz A. Para la ma­
triz A tenemos
dando como resultado X = -1 ± í y después de poco esfuerzo
La serie de Taylor iniciada anteriormente es, desde luego, la serie para estas funciones.
Como se ilustra, el proceso se extiende fácilmente a sistemas de ecuaciones más grandes.
20.2
Escriba en forma completa las fórmulas de Runge-Kutta para dos ecuaciones simultáneas de primer orden
utilizando el conjunto clásico de cuarto orden.
Sean las ecuaciones dadas
www.elsolucionario.org
20
SISTEMAS DE ECUACIONES DIFERENCIALES
347
con las condiciones iniciales y(x0) = y0, p(x0) = p0. Puede demostrarse que las fórmulas
reproducen la serie de Taylor para ambas funciones hasta términos de cuarto orden. Los detalles son idén­
ticos a los de una sola ecuación y se omitirán. Para más de dos ecuaciones, digamos n, la extensión del
método de Runge-Kutta se asemeja a la anterior, con n conjuntos de fórmulas en lugar de dos. Como un
ejemplo de la utilización de tales fórmulas véase el problema 20.7.
20.3
Escriba en forma completa la fórmula tipo predictor-corrector de Adams para las ecuaciones simultáneas
del problema anterior.
Suponga que se dispone de cuatro valores iniciales en cada función, digamos y0, y1, y2, y3, y ρ0, ρ1, ρ2, ρ3.
Entonces las fórmulas del predictor
pueden aplicarse con
Los resultados pueden utilizarse para preparar las fórmulas del corrector
las cuales son entonces iteradas hasta que las salidas consecutivas lleguen a una tolerancia especificada.
El proceso difiere fuertemente del correspondiente a una sola ecuación. La extensión a más ecuaciones o a
otras combinaciones de predictor-corrector es similar.
ECUACIONES DE M A Y O R ORDEN COMO SISTEMAS
20.4
Muestre que una ecuación diferencial de segundo orden puede sustituirse por un sistema de dos
ecuaciones de primer orden.
Sea la ecuación de segundo orden y" = f(x, y, y'). Introduciendo entonces p = y tenemos de inmedia­
to y' = p, p' = f(x, y, p). Como un resultado de este procedimiento estándar una ecuación de segundo orden
puede tratarse mediante métodos de sistemas si parece conveniente.
www.elsolucionario.org
348
20.5
MÉTODOS NUMÉRICOS
20
Muestre que la ecuación general de n-ésimo orden
puede también ser sustituida por un sistema de ecuaciones de primer orden.
Por conveniencia asignamos a y(x) el seudónimo y1(x) e introducimos las funciones adicionales y2(x)
yn(x) mediante
En esas condiciones la ecuación de orden n se convierte en
Estas n ecuaciones son de primer orden y pueden ser resueltas por medio de métodos de sistemas.
20.6
Sustituya las siguientes ecuaciones correspondientes al movimiento de una partícula en tres dimensiones:
por un sistema equivalente de ecuaciones de primer orden.
Sean x' = u,y' = v,z' = w los componentes de la velocidad. Entonces
Estas seis ecuaciones constituyen el sistema de primer orden requerido. Otros sistemas de ecuaciones de
mayor orden pueden tratarse de la misma manera.
20.7 Calcule la solución de la ecuación de van der Pol
con valores iniciales y(0) = 1, y'(0) = 0 hasta el tercer cero de y(t). Utilice las fórmulas de Runge-Kutta para
las dos ecuaciones de primer orden.
Un sistema equivalente de primer orden es
Las fórmulas de Runge-Kutta para este sistema son
www.elsolucionario.org
20
SISTEMAS DE ECUACIONES DIFERENCIALES
349
y
Eligiendo h - .2, los cálculos producen los siguientes resultados hasta en tres lugares:
Estos valores se combinan ahora en
Después de esto sigue el segundo paso con n = 1 y el cálculo continúa en esta forma. En la figura 20-1,
se muestran los resultados hasta t = 6.4 cuando la curva ha cruzado de nuevo el eje y en donde los valores
de y y p sirven como coordenadas. Este "plano de fase" se utiliza a menudo en el estudio de sistemas osci­
latorios. Aquí la oscilación (que se muestra como una línea continua) está creciendo y se aproxima a la os­
cilación periódica (línea interrumpida) cuando x tiende a infinito. Esto se demuestra en la teoría de oscilacio­
nes no lineales.
Fig.20-1
ECUACIONES DE MAYOR ORDEN RESUELTAS MEDIANTE SERIES
20.8 Obtenga una solución en serie de la ecuación lineal y" + (1 +x2 )y = ex en la vecindad de x = 0.
www.elsolucionario.org
350
MÉTODOS NUMÉRICOS
Sea la serie
20
sustituya para obtener
que puede convertirse mediante cambios de índices a
La comparación de los coeficientes de las potencias de x conduce a a2 = (1 - a0)/2, a3 = (1 - a1)/6, y enton­
ces la recurrencia
la cual produce sucesivamente a4 = -a 0 /24, a5 = -a1/24, a6 = (13a0 - 11 )/720, etc. Los números a0 y a1, se de­
terminarían por condiciones iniciales.
Una serie similar podría desarrollarse cerca de cualquier otro valor de x, puesto que los ingredientes de nues­
tra ecuación diferencial son funciones analíticas. Tales series pueden ser adecuadas para el cálculo de la
solución sobre el intervalo requerido, y si no, servir para generar valores iniciales para otros métodos.
20.9
Obtenga una solución en serie de la ecuación no lineal y" = 1 + y2 en la vecindad de x = 0, con y(0) =
y'(0)=0.
Podría emplearse el método del problema anterior, pero se ilustrará otra vez la alternativa de calcular
directamente las derivadas de mayor orden. Calculamos con facilidad
y(3) = 2yy' y(4) = 2y(l+y 2 ) + 2(y') 2 y(5) = 10y2y' + 6y' y(6) = 20y(y')2+ (1 + y2)(10y2 + 6)
y asi sucesivamente. Con las condiciones iniciales dadas todas éstas son ceros con excepción de y(6),, y por
el teorema de Taylor
20.10 Aplique el método de Gear del problema 19.52 al sistema rígido
y'=P
p' = -100y - 101p
con las condiciones iniciales y(0) = 1 y p(0) = - 1 . Este sistema es equivalente a la ecuación de segun­
do orden
y" + 101y' + 100y = 0
con y = 1 y y = -1 inicialmente. La solución exacta es y(x) = e-x.
Los métodos de Runge-Kutta podrían manejar este sistema pero el conjunto clásico de cuarto orden
requeriría un tamaño de paso menor que .0278 para un cálculo estable. Escribiendo en forma completa la
www.elsolucionario.org
20
SISTEMAS DE ECUACIONES DIFERENCIALES
351
fórmula de Gear tanto para y como para p tenemos
la cual puede volver a escribirse como un sistema lineal para yn+1 y pn+1:
Puesto que el sistema es lineal, no hay necesidad de utilizar la iteración de Newton para su solución. A con­
tinuación aparecen los resultados para dos elecciones de tamaño de intervalo h, ambos mucho más gran­
des de lo que requiere el procedimiento de Runge-Kutta. Como comparación se listan los valores verdade­
ros.
X
2
4
6
8
10
y = e -x
h=.l
h =.2
.1353
.01832
.002479
.0003355
.0000454
.1354
.01833
.002483
.0003362
.0000455
.1359
.0185
.00251
.000342
.0000465
20.11 Un perro, en un campo, ve a su dueño caminar a lo largo del camino y corre hacia él. Suponiendo que el
perro se dirige siempre directamente a su dueño, y que el camino es recto, la ecuación que gobierna la
trayectoria del perro es (véase la Fig. 20-2)
con c la proporción entre la velocidad del hombre y la del perro. Un planteamiento bien conocido conduce i
la solución exacta
para c menor que uno. Cuando x se acerca a cero, el perro alcanza a su dueño en la posición y = c/(1 - c2).
Resuelva este problema mediante un método aproximado para el caso c =1/2. La persecución debería termi­
nar en y=2/3.
www.elsolucionario.org
352
20
MÉTODOS NUMÉRICOS
Fig. 20-2
La ecuación de segundo orden se reemplaza primero por el sistema
y las condiciones iniciales por y(1) -= 0, p(1) = 0. Pueden emplearse otra vez las fórmulas de Runge-Kutta
del problema 20.2, esta vez con h negativo. La única dificultad aquí es que cuando x se acerca a cero la
pendiente p crece en forma considerable. Un método de ajuste, con un h que disminuye de tamaño, parece
ser lo indicado. Se intentó una estrategia primitiva, con h = -.1 hasta x = . 1 , después h = -.01 hasta x = .01,
y así sucesivamente. Los resultados aparecen en la tabla 20.1. Las últimas dos entradas x parecen conte­
ner error de redondeo. Los valores de p no se listan pero su tamaño ascendió a cerca de 1000.
Tabla 20.1
X
y
.1
.01
.001
.0001
.00001
.0000006
-.0000003
.3608
.5669
.6350
.6567
.6636
.6659
.6668
20.12 Las ecuaciones
en las cuales las primas se refieren a la diferenciación relativa al tiempo t, describen la órbita newtoniana de
una partícula en un campo gravitacional inverso al cuadrado, después de las elecciones adecuadas de al­
gunas constantes físicas. Si t = 0 en la posición del valor mínimo de r (Fig. 20-3) y
r(0) = 3
0(0) = 0
www.elsolucionario.org
r'(0) = 0
20
SISTEMAS DE ECUACIONES DIFERENCIALES
353
se demuestra que la órbita es una elipse r = 9/(2 + cos θ). Emplee uno de nuestros métodos de aproxima­
ción y compare con este resultado exacto.
Fig. 20-3
La aplicación es bastante directa. Se produce primero la reducción familiar a un sistema de primer or­
den
seguida por la programación de tres conjuntos de fórmulas de Runge-Kutta, y aún conforme al modelo del
problema 20.2. La integración continúa hasta que el ángulo θ excede 2π. Un fragmento seleccionado de la
salida se presenta en la tabla 20.2 (se utilizó el tamaño de intervalo h = .1) y es claro que tiene la calidad or­
bital deseada. Como una verificación extra, la teoría señala el periodo T = 12π√3, o próximo a 65.3, y los re­
sultados concuerdan bastante bien.
Tabla 20.2
t
r
θ
P
0
6
7
32
33
59
65
66
3.00
4.37
4.71
9.00
9.00
4.47
3.00
3.03
.00
1.51
1.66
3.12
3.15
4.73
6.18
6.52
.00
.33
.33
.01
-.004
-.33
-.03
.08
Problemas suplementarios
20.13 Las ecuaciones
www.elsolucionario.org
354
MÉTODOS NUMÉRICOS
20
describen la trayectoria de un pato que intenta cruzar por el agua un rio dirigiéndose de modo uniforme ha­
cia un blanco T. La velocidad del río es 1 y la velocidad del pato es 2. El pato inicia es S, por lo que x(0) = 1
y y(0) = 0. (Véase la Fig. 20-4.) Aplique las fórmulas de Runge-Kutta en dos ecuaciones simultáneas para
calcular la trayectoria del pato. Compare con la trayectoria exacta y = 1/2(x1/2 - x3/2). ¿Cuánto tarda el pato en
alcanzar el blanco? .
Fig. 20-4
20.14 Resuelva el problema anterior mediante el método predictor-corrector de Adams.
20.15 Aplique el método de Milne al problema 20.13.
20.16 La clásica ley inversa al cuadrado para un objeto que cae hacia una masa gravitacional que lo atrae (la
Tierra, por ejemplo) es
donde g es una constante y R es el radio de la Tierra. Esto tiene la bien conocida y un poco sorprendente
solución
donde H es la altitud inicial y la velocidad inicial es cero. Introduciendo el sistema equivalente
aplique las fórmulas de Runge-Kutta para calcular la velocidad p(f) y la posición y(t). ¿Cuándo alcanza la
superficie terrestre el objeto que cae? Compare con el resultado exacto. (Si se utilizan millas y segundos
como unidades, entonces g = 32/5280, R = 4000, y tómese H igual a 200 000, que es la distancia de la Luna a la
Tierra. El problema ejemplifica algunas de las dificultades al calcular trayectorias espaciales.)
20.17 Aplique el método de Adams al problema 20.16.
www.elsolucionario.org
20
SISTEMAS DE ECUACIONES DIFERENCIALES
355
20.18 Muestre que la solución de yy" + 3(y')2 = 0 con y(0) = 1 y y'(0) = 1/4 puede expresarse como
20.19 Muestre que
tiene una solución de la forma
y determine los coeficientes si la condición
se requiere para un x que se acerca a cero.
20.20 Aplique las fórmulas de Runge-Kutta a
y'=-12y+9z
z' = 11y -10z
que tiene la solución exacta
empleando y(1) = 9e-1 z(1) = 11e-1 como condiciones iniciales. Trabaje con tres o cuatro lugares decimales
con h =.2 y lleve el cálculo al menos hasta x = 3. Observe que 11y/9z, que debe permanecer cercano a
uno, empieza a oscilar considerablemente. Explique esto comparando la aproximación de Taylor de cuarto
grado para e-21x (que es esencialmente lo que utiliza el método de Runge-Kutta) con la exponencial exacta.
www.elsolucionario.org
Aproximación polinomial
por mínimos cuadrados
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el concepto de ajuste de curvas mediante mínimos cuadrados
(Introducción).
2. Explicar con sus propias palabras cuando menos cinco ventajas y cinco desventajas del ajuste de
curvas mediante mínimos cuadrados (Introducción).
3. Efectuar el desarrollo matemático para encontrar las ecuaciones normales del método de mínimos
cuadrados, expresándolas en forma matricial (Introducción, Problemas 21.1, 21.6).
4. Encontrar, dado un conjunto de puntos experimentales, los parámetros del modelo lineal, utilizando el
criterio de mínimos cuadrados (Introducción, Problemas 21.2 a 21.4, 21.57 a 21.59, 21.63).
5. Efectuar la Iinealización de un modelo no lineal, para después aplicar el método de mínimos
cuadrados para modelos lineales (Introducción, Problemas 21.5, 21.64,21.65).
6. Demostrar matemáticamente que la idea de mínimos cuadrados puede generalizarse a espacios
vectoriales arbitrarios (Problemas 21.7 a 21.9).
7. Encontrar, dado un conjunto de puntos experimentales, los parámetros del modelo cuadrático,
utilizando el criterio de minimos cuadrados (Introducción, Problemas 21.10, 21.11, 21.61, 21.62).
8. Efectuar el desarrollo matemático para encontrar una parábola de mínimos cuadrados, para cinco
puntos equidistantes (Problemas 21.12 a 21.18, 21.60, 21.70 a 21.72, 21.75).
9. Comparar los valores de la primera derivada de una función conocida, con la obtenida mediante una
parábola de colocación y con otra parábola de cinco puntos de mínimos cuadrados; en todos los
casos evaluar en los mismos puntos (Introducción, Problemas 21.19, 21.20, 21.69, 21.71, 21.73, 21.74).
10. Efectuar el desarrollo matemático para encontrar una parábola de mínimos cuadrados, para cuatro
puntos equidistantes y aplicar la fórmula con puntos experimentales (Problemas 21.20, 21.21, 21.75).
11. Comparar los valores de la segunda derivada de una función conocida, con la obtenida mediante una
parábola de mínimos cuadrados; en todos los casos evaluar en los mismos puntos (Introducción,
Problema 21.22).
12. Efectuar el desarrollo matemático para encontrar una parábola de mínimos cuadrados, para siete
puntos equidistantes, obtener la primera derivada y aplicar la fórmula con puntos experimentales
(Problemas 21.23, 21.66 a 21.69).
13. Efectuar el desarrollo matemático para encontrar a partir del método de mínimos cuadrados, el de
promedio móviles y aplicar la fórmula con puntos experimentales (Problemas 21.76 a 21.79).
14. Efectuar el desarrollo matemático para encontrar ios polinomios ortogonales para el caso discreto,
con el fin de encontrar una aproximación por mínimos cuadrados, que nos evite el manejo de matrices
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
357
mal condicionadas y aplicar las fórmulas con puntos experimentales (Introducción, Problemas 21.24 a
21.29, 21.80 a 21.84).
15. Efectuar el desarrollo matemático para encontrar los polinomios ortogonales para el caso continuo,
con el fin de encontrar una aproximación por mínimos cuadrados, apoyados en los polinomios de
Legendre y aplicar las fórmulas en problemas de ejemplo (Introducción, Problemas 21.30 a 21.34,
21.85 a 21.88).
16. Efectuar el desarrollo matemático para encontrar los polinomios ortogonales para el caso continuo
en general, con el fin de encontrar una aproximación por mínimos cuadrados y aplicar las fórmulas en
puntos de ejemplo (Introducción, Problemas 21.35 a 21.40).
17. Efectuar el desarrollo matemático para encontrar una aproximación por mínimos cuadrados, mediante
los polinomios de Chebyshev, y aplicar las fórmulas en problemas de ejemplo (Introducción,
Problemas 21.41 a 21.56, 21.89 a 21.108).
18. Aplicar, de acuerdo con su criterio y justificando su elección con los conocimientos adquiridos en este
capítulo; el mejor método para encontrar una aproximación por mínimos cuadrados en problemas
de ejemplo (Introducción, Problemas 21.109 a 21.111).
APLICACIONES DE LA APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
En muchas de las ramas de la industria y de la ciencia, los métodos de mediciones experimentales pueden
ser inexactos y las mediciones en sí mismas pueden restringirse en cantidad. Por ejemplo una simple medida lineal se encuentra sujeta a imprecisiones y los resultados de un procedimiento experimental complicado pueden
verse afectados por muchos factores disturbantes; de la misma forma las pruebas estadísticas de fallas mecánicas
de las partes sometidas a esfuerzo, en caso de que la muestra informe que se rechaza el lote, se destruirán.
El enfoque estadístico a un problema en particular permitirá al experimentador diseñar un método de solución que minimice el efecto del error experimental, lo cual le permitirá estimar la confiabilidad de los resultados.
Con frecuencia en los problemas estadísticos, la técnica sugiere examinar cantidades relativamente pequeñas de
datos experimentales y posteriormente generalizar acerca de grandes cantidades de datos.
Un método muy práctico es observar las fluctuaciones en la cantidad medible y en los factores que influyen
en ella; esto se lleva a cabo durante el curso de una operación en particular sin intentar controlar los factores separadamente. En este caso, se emplean los métodos de análisis de regresión para evaluar la dependencia.
Una forma de afrontar la solución de la matriz generada con las ecuaciones de regresión es mediante los
métodos gaussianos que se verán en el capítulo 26. Sin embargo los métodos que implican inversiones de matrices son largos, nos proporcionan al mismo tiempo las varianzas de los coeficientes que se deberán conocer si
posteriormente fuera necesario cuestionarlas.
Un problema que se suscita al emplear este método, adicional al de conocer la eliminación gaussiana, es
que las matrices que se forman tienden a ser mal condicionadas (aquellas matrices cuyos elementos tienen
valores muy grandes comparados con los valores de la diagonal principal) y para resolverlas será necesario
emplear métodos tales como Jacobi o Gauss-Seidel, o bien usar repetidamente los métodos directos de eliminación gaussiana.
Otra metodología que se presenta en este capítulo, es un conjunto apropiado de polinomios que obedecen
a la propiedad de ortogonalidad. La ventaja de esta técnica es que los coeficientes de regresión se pueden obtener sin necesidad de resolver un sistema de ecuaciones lineales simultáneas. Por lo tanto cualquier problema relacionado con la inversión de alguna matriz mal condicionada o que esté muy cerca de ser matriz singular (su
www.elsolucionario.org
358
MÉTODOS NUMÉRICOS
21
determinante es igual a cero), lo cual se propicia cuando incrementamos el grado del polinomio de regresión, es mejor resolverlo empleando polinomios ortogonales, que a su vez nos proporcionan datos acerca de
la varianza y la covarianza.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Métodos numéricos
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Operación de polinomios
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Álgebra no lineal y optimización
Raíces de ecuaciones
Ceros de polinomios
Sistemas de ecuaciones lineales
Sistemas de ecuaciones lineales
www.elsolucionario.org
1
2
10
11
13
14
21
13
14
21
25
25
26
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
359
EL CONCEPTO
En este tema estudiaremos las formas de aproximar una función g(x) a diferentes f(x), de tal manera que g(x) ≈
f(x). Existen varias razones para desear hacerlo; aquí expondremos algunos casos muy comunes:
1. Nos proporciona información acerca de las relaciones existentes entre XyY.
2. Este método causa una suavización de la curva formada por un conjunto de datos y elimina en algún gra­
do los errores del observador, de medición, de registro, de transmisión y de conversión; así como otro tipo
de errores aleatorios que contengan los datos.
3. Es un método diferente de la interpolación, debido a que el polinomio de interpolación se iguala exacta­
mente con los puntos dados, lo cual puede causar que se conserven los errores que pudieran tener los
datos.
EL MÉTODO DE M Í N I M O S CUADRADOS
En este caso se aproximan varias coordenadas a la curva que mejor se ajuste a estos puntos para minimizar el
error.
Se combinan la función fk(X) = Xk (para k = 0,1, m) y la fórmula del polinomio Pm(X) (m < n).
De esta manera aproximamos una función Y = f(X) por un polinomio de grado m, sobre el rango de los pares de
datos (Xi, Yi) (para i = 0 , 1 , 2
n).
Entonces los parámetros a0, a1 a2, a3
am se determinan de manera que la:
sea mínima
Es decir, la diferencia entre el punto real y el lugar por donde pasa el polinomio sea mínima. Haciendo el desarro­
llo para m = 2.
www.elsolucionario.org
360
MÉTODOS NUMÉRICOS
Las ecuaciones normales que determinan a0, a1 a2, a3
fk(Xi), y nos da las ecuaciones de restricción:
21
am se obtienen directamente sutituyendo a las Xik por
C A =B
A = C-1 B
EL PRINCIPIO DE MÍNIMOS CUADRADOS
La idea básica de elegir una aproximación polinomial p(x) a una función determinada y(x) en forma que mini­
mice los cuadrados de los errores (en cierto sentido) fue desarrollada primero por Gauss. Hay bastantes variacio­
nes dependiendo del error implicado y de la medida del error que se usará.
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
361
Antes que cualquier otra cosa, cuando los datos son discretos es posible que minimicemos la suma
para datos dados xi, yi, y m < N. La condición m < N hace poco probable que el polinomio
pueda colocar en modo alguno N puntos dados. Así es probable que S no pueda hacerse cero. La idea de Gauss
es hacer S tan pequeño como podamos. Las técnicas estándar del cálculo conducen entonces a las ecuaciones
normales, que determinan los coeficientes ai. Estas ecuaciones son
donde
Este sistema de ecuaciones lineales determina en forma única las ai y las aj resul-
tantes producen realmente el valor mínimo posible de S. En el caso de un polinomio lineal
las ecuaciones normales se resuelven fácilmente y dan como resultado
Con el fin de proporcionar un tratamiento unificado de los diversos métodos de mínimos cuadrados que se
presentarán, incluso el primer método que acaba de describirse, se considera un problema general de minimización en el espacio vectorial. La solución se encuentra con facilidad mediante un argumento algebraico, empleando
la idea de proyección ortogonal. El problema general reproduce naturalmente nuestro p(x) y las ecuaciones nor­
males. Éste se reinterpretará para resolver otras variaciones del principio de mínimos cuadrados conforme avan­
cemos. En la mayor parte de los casos se proporcionará un argumento duplicado para el caso especial que se
disponga.
Excepto para el polinomio de muy bajo grado, el sistema anterior de ecuaciones normales demuestra estar
mal condicionado. Esto significa que, aunque define en forma única los coeficientes ai, puede demostrarse que en
la práctica es imposible desenredar las ai. Los métodos estándar para resolver sistemas lineales (que se presenta­
rán en el capítulo 26) de ninguna manera pueden producir una solución, o pueden generar muchísimos errores
magnificados de los datos. Como resultado se presentan los polinomios ortogonales. (Esto equivale a elegir una
base ortogonal para el espacio vectorial abstracto.) En el caso de datos discretos éstos son polinomios pm,N(t) de
grado m = 0 , 1 , 2 , . . . con la propiedad
www.elsolucionario.org
362
MÉTODOS NUMÉRICOS
21
Ésta es la propiedad de ortogonalidad. Se obtendrá la representación
en donde sobresalen los coeficientes binomiales y los polinomios factoriales.
Una forma alternativa conveniente de nuestro polinomio de mínimos cuadrados es
con nuevos coeficientes ak. Las ecuaciones que determinan estas ak demuestran ser en extremo fáciles de resol­
ver. En efecto,
Estas ak minimizan la suma de errores S, siendo el mínimo
donde WK es la suma del denominador en la expresión para ak.
APLICACIONES
Hay dos principales aplicaciones de los polinomios de mínimos cuadrados para datos discretos.
1. Ajuste de datos. Al aceptar el polinomio
en lugar del y(x) dado, obtenemos una línea ajustada o aproximada, una parábola u otra curva en lugar de
la función de datos original, probablemente irregular. El grado que p(x) debe tener depende de las cir­
cunstancias. Con frecuencia se utiliza una parábola de mínimos cuadrados de cinco puntos, que corres­
ponde a los puntos (xi, yi) con i=k-2, k -1,.....,k + 2. Esto conduce a la fórmula de ajuste
Esta fórmula combina los cinco valores yk-2,........,yk+2 para proporcionar una nueva estimación del valor
exacto desconocido y(xk). Cerca de los extremos de una provisión finita de datos, se requieren modifica­
ciones menores.
El error de la raíz de la media cuadrática de un conjunto de aproximaciones Ai a los valores verda­
deros correspondientes Ti se define como
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
363
En diversos casos de prueba, donde se conocen las Ti usaremos esta medida del error para estimar la
eficacia del ajuste por mínimos cuadrados.
2.
Diferenciación aproximada. Como vimos antes, el ajuste de un polinomio de colocación con datos irre­
gulares conduce a estimaciones muy pobres de las derivadas. Incluso los errores pequeños en los datos
se aumentan a un tamaño problemático. Pero un polinomio de mínimos cuadrados no realiza la coloca­
ción. Pasa entre los valores de los datos y brinda el ajuste. Esta función más uniforme suele producir me­
jores estimaciones de las derivadas, esto es, los valores de p'(x). La parábola de cinco puntos que acaba
de mencionarse conduce a la fórmula
Cerca de los extremos de una provisión finita de datos esta fórmula también requiere modificación. Usualmente produce resultados muy superiores a los obtenidos diferenciando polinomios de colocación. Sin
embargo, al volverla a aplicar a los valores p'(xk) en un esfuerzo para estimar y"(xk), nos lleva otra vez a
una precisión cuestionable.
DATOS CONTINUOS
Para datos continuos y(x) podemos minimizar la integral
donde P¡(x) son los polinomios de Legendre. Debemos suponer a y(x) integrable. Esto significa que tenemos que
elegir para representar nuestro polinomio de mínimos cuadrados p(x) desde el principio en términos de polinomios
ortogonales, en la forma
Los coeficientes resultan
Por conveniencia al utilizar los polinomios de Legendre, el intervalo sobre el cual se dan los datos y(x) se normali­
za primero en ( - 1 , 1). Algunas veces es más conveniente utilizar el intervalo (0,1). En este caso los polinomios de
Legendre deben también someterse a un cambio de variable. Los nuevos polinomios reciben el nombre de polino­
mios de corrimiento de Legendre.
Suele ser necesario algún tipo de discretización cuando y(x) es de estructura complicada. Las integrales que
producen los coeficientes deben calcularse mediante métodos de aproximación, o el conjunto de argumentos con­
tinuo debe discretizarse al principio y minimizarse la suma en lugar de la integral. Sencillamente, hay varios plan­
teamientos alternativos y la computadora debe decidir cuál utilizar en un problema particular.
El ajuste y la diferenciación aproximada de una función de datos continua dada son las aplicaciones princi­
pales de nuestro polinomio de mínimos cuadrados p(x). Aceptamos, sencillamente, p(x) y p'(x) como sustitutos pa­
ra los más irregulares y(x) y y'(x).
www.elsolucionario.org
364
MÉTODOS NUMÉRICOS
21
Una generalización del principio de mínimos cuadrados implica minimizar la integral
donde w{x) es una función de peso no negativa. Las Qk(x) son polinomios ortogonales en el sentido general
p a r a j ≠ . Los detalles son similares a los del caso w(x) = 1 ya mencionado, donde los coeficientes ak están dados
por
El valor mínimo de / puede expresarse como
donde Wk es la integral del denominador en la expresión para ak. Esto nos lleva a la desigualdad de Bessel
y al hecho de que para un m que tiende a infinito la serie
es convergente. Si la familia ortogonal compren-
dida tiene la propiedad conocida como completez y si y(x) es suficientemente uniforme, entonces la serie real­
mente converge a la integral que aparece en /min.Esto significa que el error de la aproximación tiende a cero cuan­
do el grado de p(x) se incrementa.
La aproximación donde se utilizan los polinomios de Chebyshev es el importante caso especial w(x) del método generalizado de mínimos cuadrados, donde se normaliza el intervalo de integración en
(-1,1). En este caso los polinomios ortogonales Qk(x) son los polinomios de Chebyshev
Los primeros resultan ser
Las propiedades de los polinomios de Chebyshev incluyen
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
365
Una propiedad especialmente atractiva es la de errores iguales, que se refiere a la oscilación de los polinomios de
Chebyshev entre valores extremos de +1, alcanzando estos extremos en n + 1 valores dentro del intervalo (-1,1).
Como consecuencia de esta propiedad el error y(x) - p(x) se encuentra que frecuentemente oscila entre máximos
y mínimos cercanos a ±E. Dicho error casi igual es deseable puesto que implica que nuestra aproximación tiene
precisión casi uniforme a través de todo el intervalo. Con respecto a la propiedad de error igual exacto, véase el si­
guiente capítulo.
Las potencias de x pueden expresarse en términos de los polinomios de Chebyshev mediante procedimien­
tos sencillos. Por ejemplo,
Esto indica un proceso conocido como polinomios de economizaclón, por medio del cual cada potencia de x en un
polinomio es sustituida por la combinación correspondiente de los polinomios de Chebyshev. A menudo se en­
cuentra que el número de polinomios de Chebyshev de mayor orden puede reducirse de ese modo, constituyendo
entonces los términos retenidos una aproximación de mínimos cuadrados al polinomio original, de precisión sufi­
ciente para muchos propósitos. Los resultados obtenidos tendrán la propiedad de errores casi iguales. Este proce­
so de economización puede usarse como un sustituto aproximado para la evaluación directa de las integrales de
los coeficientes de una aproximación mediante polinomios de Chebyshev. El molesto factor de peso w(x) hace te­
mibles estas integrales para la mayor parte de y(x).
Otra variación del principio de mínimos cuadrados se utiliza para minimizar la suma
siendo los argumentos xi - cos[(2i + 1 )π/2/N]. Estos argumentos pueden admitirse como los ceros de TN(x). Los
coeficientes se determinan con facilidad utilizando una segunda propiedad de ortogonalidad de los polinomios de
Chebyshev,
y resultan ser
El polinomio de aproximación es entonces, desde luego,
Este polinomio tiene también un error casi igual.
www.elsolucionario.org
366
21
MÉTODOS NUMÉRICOS
LA NORMA L2
El tema implícito de este capítulo es minimizar la norma
‖y-p‖2
donde y representa los datos proporcionados y p el polinomio de aproximación.
Problemas resueltos
DATOS DISCRETOS, LA RECTA DE MÍNIMOS CUADRADOS
21.1 Encuentre la linea recta p(x) = Mx + B para la cual
datos (xi, yi).
es un mínimo, se proporcionan los
Llamando S a la suma, seguimos un curso patrón para determinar el mínimo y hacemos las derivadas
cero
Reescribiendo tenemos
que son las "ecuaciones normales". Introduciendo los símbolos
estas ecuaciones pueden resolverse en la forma
Para mostrar que S0S2 - s21 no es cero, observamos primero que elevando al cuadrado y añadiendo términos
tales como (x0 - x1)2 se llega a
Pero también
de modo que S0S2 - s21 se vuelve
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
367
Aquí hemos supuesto que las x, no son todas ¡guales, lo cual es seguramente razonable. Esta última desi­
gualdad también ayuda a probar que la M y la B elegidas producen en realidad un mínimo. Al calcular las
segundas derivadas encontramos
Puesto que las dos primeras son positivas y como
se satisface la prueba de la segunda derivada para un mínimo de una función de dos argumentos B y A. El
hecho de que las primeras derivadas puedan anularse en conjunto sólo una vez muestra que nuestro míni­
mo es absoluto.
21.2
Los marcadores promedio proporcionados por golfistas de diversos handicaps en un difícil hoyo par tres
son como sigue:
Handicap
6
8
10
12
14
16
18
20
22
24
Promedio
3.8
3.7
4.0
3.9
4.3
4.2
4.2
4.4
4.5
4.5
Encuentre la función lineal de mínimos cuadrados para estos datos mediante las fórmulas del proble­
ma 21.1.
Dejemos que h represente el handicap y que x = (h - 6)/2. Entonces las xi son los enteros 0, . . . , 9.
Dejemos que y represente el marcador promedio. Entonces s0 = 10, S1 = 45, s2 = 285, t0 = 41.5, t1 = 194.1 y
así
21.3
Use la línea de mínimos cuadrados del problema anterior para ajustar los datos reportados.
El esfuerzo para ajustar los datos se efectúa bajo la suposición de que los datos reportados contienen
inexactitudes de tamaño que justifican corrección. En este caso parece que los datos caen aproximadamen­
te a lo largo de una linea recta, aunque hay grandes fluctuaciones, debido quizá a las fluctuaciones natura­
les en un juego de golf. (Véase la figura 21 - 1.) Puede suponerse que la recta de mínimos cuadrados es una
mejor representación de la verdadera relación entre el handicap y los marcadores promedio que lo que son
los datos originales. Ella produce los siguientes valores ajustados:
Handicap
6
8
10
12
14
16
18
20
22
24
y ajustada
3.76
3.85
3.94
4.03
4.12
4.21
4.30
4.39
4.48
4.57
www.elsolucionario.org
21.4
21
MÉTODOS NUMÉRICOS
368
Estime la tasa a la cual se incrementa el marcador promedio por handicap unitario.
Partiendo de la recta de mínimos cuadrados del problema 21.2 obtenemos el cálculo de .045 de golpe
por handicap unitario.
21.5
Obtenga una fórmula del tipo P(x) = AeMx a partir de los siguientes datos:
xi
1
2
3
4
Pi
7
11
17
27
Sea y = log P, B = log A. En consecuencia, tomando logaritmos, log P = log A + Mx que es equivalen­
te a y(x) = Mx + B.
Después de esto decidimos hacer esta recta de mínimos cuadrados para los puntos dados (xi, yi,).
xi
1
2
3
4
yi
1.95
2.40
2.83
3.30
Puesto que s0 = 4, s1 = 10, s2 = 30, t0 = 10.48, t1 = 28.44, las fórmulas del problema 21.1 producen M ≈ .45 y
B ≈ 1.5. La fórmula resultante es P = 4.48e45x.
sino que en vez de eso
Debe observarse que en este procedimiento no minimizamos
Ésta es una decisión muy común en tales probleelegimos la tarea más simple de minimizar
mas.
DATOS DISCRETOS, EL POLINOMIO DE MÍNIMOS CUADRADOS
21.6
Generalizando el problema 21.1, encuentre el polinomio p(x) - a0 + a1x + ...+ amxm para el cual S =
es un mínimo, se proporcionan los datos (xi, yi),y m < N.
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
a1,
369
Procedemos como en el caso más simple de la línea recta. Haciendo cero las derivadas relativas a0,
am se producen m + 1 ecuaciones
donde k - 0
se como
m. Se introducen los símbolos
estas ecuaciones pueden reescribir-
y se denominan ecuaciones normales. Resolviendo para los coeficientes ai, obtenemos el polinomio de mí­
nimos cuadrados. Mostraremos que sólo hay una solución y que ella no minimiza a S. Para enteros m más
pequeños, estas ecuaciones normales pueden resolverse sin dificultad. En el caso de m más grande, el sis­
tema está bastante mal condicionado y se indicará un procedimiento alternativo.
21.7
Muestre cómo la idea de mínimos cuadrados, en la forma que acaba de presentarse en el problema 21.6 y
antes en el problema 21.1, puede generalizarse a espacios vectoriales arbitrarios. ¿Cuál es la relación con
la proyección ortogonal?
Este enfoque más general servirá como un modelo para otras variaciones de la idea de mínimos cua­
drados que se presentará más adelante en este capítulo y centra la atención en las características comu­
nes que comparten todas estas variaciones. Primero recordamos que en la geometría euclidiana plana, da­
do un punto y y una línea S, el punto sobre S más cercano a y es el único punto p tal qué py es ortogonal a
S, siendo p el punto de la proyección ortogonal de y en S. De modo similar en la geometría euclidiana sóli­
da, dados un punto y un piano S, el punto sobre este último más cercano a y es el único punto p tal que py
es ortogonal a todos los vectores en S. Otra vez p es la proyección ortogonal de y. Esta idea se extiende
ahora a un espacio vectorial más general.
Estamos dando un vector y en un espacio vectorial E y encontramos un vector p en un subespacio
dado S tal que
lly - pll < lly - qll
donde q es cualquier otro vector en S y la norma de un vector v es
denotando el paréntesis el producto escalar asociado al espacio vectorial. Empezamos mostrando que hay
un vector p único para el cual y - p es ortogonal a cada vector en S. Este p se denomina la proyección orto­
gonal de y.
Sea e 0 , . . . , em una base ortogonal para S y consideremos el vector
p = (y, e0)e0 + (y, e1)e1 + ... + (y, em)em
El cálculo directo muestra que (p, ek) = (y, ek) y por consiguiente (p - y, ek) = 0 para k = 0, . . . . m. Resulta
entonces que (p - y, q) = 0 para cualquier q en S, expresando simplemente q en términos de la base orto-
www.elsolucionario.org
370
21
MÉTODOS NUMÉRICOS
gonal. Si cualquier otro vector p' tiene también esta propiedad (p' - y, q) = 0, se obtendría en ese caso que
para cualquier q en S (p - p', q) - 0. Puesto que el propio p - p' está en S, esto obliga a que (p - p', p - p') = 0
lo que, por las propiedades requeridas de cualquier producto cscalar, implica que p = p'. En consecuencia,
la proyección ortogonal es única.
Pero ahora, si q es otro vector aparte de p en S,
‖ y - q ‖ 2 = ‖ ( y - p ) ‖ + (p-q)‖2
‖y
- q‖2 + ‖p - q‖2+ 2(y - p, p - q)
Puesto que el último término es cero, estando p - q en S, deducimos que ||y - p|| < lly - qll como se requería.
21.8
Si u0,
las uk.
u1
um es una base arbitraria para S, determine el vector p del problema anterior en términos de
Debemos tener (y - p, uk) = 0 o (p, uk) = (y, uk) para k = 0,....,m. Puesto que p tiene la representación única p = a0u0 + a1u1 + ... + am um, la sustitución conduce directamente a
(U0 , uk)a0+ (u1 , uk)a1 + ... + (am , uk)am = (y, uk)
para k = 0 , . . . , m. Éstas son las ecuaciones normales para el problema dado y se resolverán para los coeficientes a0
am. El problema anterior garantiza una solución única. Observe que en el caso especial en
el que u0, u1 . . . , um son ortogonales, estas ecuaciones normales se reducen a ai = (y, ui) como en la prueba dada en el problema 21.7.
Note también el siguiente corolario. Si la propia y se representa en términos de una base ortogonal en
E que incluye u0,..., um, digamos
y = a 0 a 0 + a1u1 + ... + amum +am+1um
+1
+ ...
entonces la proyección ortogonal p, que es la aproximación por mínimos cuadrados, está disponible por el
simple truncamiento de la representación después del término amun:
p = a0u0 + a1u1 + ... + amum
21.9
¿Cómo se relaciona el caso específico tratado en el problema 21.6 con la generalización dada en los
problemas 21.7 y 21.8?
Deben hacerse las siguientes identificaciones:
E:
El espacio de funciones discretas de valor real sobre el conjunto de argumentos x0,.. ., XN
S:
El subconjunto de E que incluye los polinomios de grado m o menor
y: La función dato con los valores y 0 , . . . , yn
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
uk:
La función con valores xik
p:
El polinomio con valores pi = a0 + a1xi + ... + amxim
371
Con estas identificaciones nos enteramos también que el polinomio p del problema 21.6 es único y
que en realidad brinda la suma mínima. El resultado general del problema 21.7 y 21.8 establece lo anterior.
21.10 Determine la función cuadrática por mínimos cuadrados para los datos del problema 21.2.
Las sumas s0, s1, s2, t0 y t1 ya se han calculado. Necesitamos también s3 = 2025, s4 = 15 333, y t2 =
1292.9 que permiten que las ecuaciones normales se escriban
10a0+ 45a1 + 285a2 = 41.5
45a0 + 285a1 + 2025a2 = 194.1 285a0 + 2025a1 + 15.333a2 = 1248
Después de un poco de trabajo se obtiene a0 = 3.73, a1 = .11, y a2 = -.0023 por lo que nuestra función cua­
drática es p(x) = 3.73 + .11x - .0023x2.
21.11 Aplique la función cuadrática del problema anterior para ajusfar los datos informados.
Suponiendo que los datos deben haber sido los valores de nuestra función cuadrática, obtenemos es­
tos valores:
Handicap
6
8
10
12
14
16
18
20
22
24
y ajustada
3.73
3.84
3.94
4.04
4.13 4.22
4.31
4.39
4.46
4.53
Esto difiere muchísimo de las predicciones de la hipótesis de la línea recta, y la parábola correspondiente a
nuestra función cuadrática no diferiría notablemente de la línea recta de la figura 21-1. El hecho de que a2
sea tan pequeño muestra en realidad que puede ser innecesaria la hipótesis cuadrática en el problema del
golf.
AJUSTE Y DIFERENCIACIÓN
21.12 Deduzca la fórmula para una parábola por mínimos cuadrados para cinco puntos (xi, yi) donde i = k - 2, k - 1,
k, k, + 1, k + 2.
Sea la parábola p(t) = a0 + a1t+ a2t2, donde t = (x - xk)/h, asumiéndose argumentos igualmente espaciados en el intervalo h. Los cinco puntos comprendidos tienen ahora argumentos t = - 2 , - 1 , 0 , 1 , 2. En este
www.elsolucionario.org
372
21
MÉTODOS NUMÉRICOS
arreglo simétrico las ecuaciones normales se simplifican a
y se resuelven fácilmente. Encontramos primero
de la cual
Sustituyendo de nuevo obtenemos también
Y directamente de la ecuación de en medio
21.13 Con y(xk) representando el valor exacto del cual yk es una aproximación, deduzca la fórmula de ajuste y(xk) ≈
La parábola por mínimos cuadrados para los cinco puntos (xk-2, yk-2) a (xk-2, yk+2) es
p(x) = a0 + a1t + a2t2
Tabla 21.1
1
2
1.04
3
137
33
4
170
33
0
5
2 00
30
-3
-3
6
2 26
26
-4
-1
7
2.42
16
-10
-6
8
2.70
28
12
22
9
2.78
8
-20
-32
3.00
22
14
34
-5
28
-54
66
-56
0
0
2
-5
6
-5
1 70
2.00
2.24
2.47
2.64
2.83
0
3.14
14
-8
-22
2
www.elsolucionario.org
1
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
373
por el problema 21.12. El empleo de esta
En el argumento central t = 0 esto se vuelve
fórmula equivale a aceptar el valor de p en la parábola, mejor que el valor del dato yk.
21.14 Las raíces cuadradas de los enteros de 1 a 10 se redondearon hasta dos lugares decimales y se añadió a
cada una un error aleatorio de -.05, -.04,...,.05 (determinados por la extracción de cartas de un paquete
de 11 así etiquetadas). Los resultados forman el renglón superior de la tabla 21.1. Ajuste estos valores
empleando la fórmula del problema anterior.
En la tabla 21.1 aparecen diferencias hasta de cuarto grado, así como
inferior contiene los valores ajustados.
Y finalmente el renglón
21.15 La fórmula de ajuste del problema 21.13 requiere dos valores dato sobre cada lado de xk para producir el
valor ajustado p(xk). En consecuencia, no puede aplicarse a las dos primeras y a la última entrada de la
tabla. Obtenga las fórmulas
para valores extremos ajustados.
Si dejamos t - (x - x2)lh, entonces la función cuadrática del problema 21.12 es la función cuadrática
de mínimos cuadrados para los primeros cinco puntos. Usáremos los valores de esta función en x0 y x1, co­
mo valores ajustados de y. Primero
p(x0) = a 0 - 2 a 1 +4a 2
e insertando nuestras expresiones para las ai, con k sustituida por 2,
que se reduce a la fórmula anterior para y(x0). Para p(x1) tenemos
p(x1) = a0 - a1 + a2
y la inserción de nuestras expresiones correspondientes a las ai conduce otra vez a la fórmula requerida. En
el otro extremo de nuestra provisión de datos se aplica el cambio de argumento t = (x - xN-2)lh, donde los
detalles son similares.
21.16 Aplique las fórmulas del problema precedente para completar el ajuste de los valores y en la tabla 21.1.
Encontramos estos cambios hasta en dos lugares
www.elsolucionario.org
374
21
MÉTODOS NUMÉRICOS
21.17 Calcule el valor RMS tanto de los datos originales como de los valores ajustados.
El error de la raíz media cuadrática de un conjunto de aproximaciones Ai correspondiente a los valo­
res exactos Ti está definido por
En este ejemplo tenemos los siguientes valores:
Ti
1.00
1.41
1.73
2.00
2.24
2.45
2.65
2.83
3.00
3.16
yi
1.04
1.37
1.70
2.00
2.26
2.42
2.70
2.78
3.00
3.14
P(xi)
1.03
1.38
1.70
2.00
2.24
2.47
2.64
2.83
2.99
3.14
Las raices exactas están dadas hasta en dos lugares. Mediante la fórmula anterior,
asi que el error es menor por casi la mitad. La mejora sobre la parte central es más grande. Si se ignoran
los valores en cada extremo encontramos errores RMS de .035, y .015, respectivamente, para una reduc­
ción de más de la mitad. La fórmula del problema 21.13 parece más efectiva que las del problema 21.15.
21.18 Utilice la parábola de cinco puntos para obtener la fórmula
para la diferenciación aproximada.
Con los símbolos del problema 21.13 usaremos y'(xk), que es al derivada de nuestra parábola de cin­
co puntos, como una aproximación a la derivada exacta en xk. Esto equivale otra vez a suponer que nues­
tros valores dato yi son valores aproximados de una función exacta pero desconocida, pero que la parábola
de cinco puntos será una aproximación mejor, en especial en la vecindad del punto central. Sobre la pará­
bola
p = a0 + a1t + a2t2
y de acuerdo al esquema, calculamos que p'(t) en t = 0 corresponde a a,. La conversión de esto es una de-
www.elsolucionario.org
21
APROXIMACIÓN POUNOMIAL POR MÍNIMOS CUADRADOS
375
rivada relativa a x implica tan sólo la división entre h, y asi, recuperando el valor de a, encontrado en el pro­
blema 21.12 y tomando p'(x) como una aproximación a y' (x), llegamos a la fórmula requerida.
21.19 Aplique la fórmula anterior para estimar y'(x) a partir de los valores yk dados en la tabla 21.1.
En x2 = 3 encontramos
y en x3 = 4,
Las otras entradas que se muestran en el renglón superior se encuentran de la misma manera. El segundo
renglón se calculó empleando la aproximación
encontrada antes mediante el polinomio de colocación de Stirling de cinco puntos. Observe la superioridad
de la fórmula presente. Se encontró antes de que los errores en los datos se aumentaran en forma conside­
rable con las fórmulas de diferenciación aproximada. El ajuste preliminar puede llevar a mejores resultados,
reduciendo tales errores de los datos.
y'(x) por mín. cuadrados
.31
.27
.24
.20
.18
.17
y'(x) por colocación
.31
.29
.20
.23
.18
.14
y'(x) correcta
.29
.25
.22
.20
.19
.18
21.20 La fórmula del problema 21.18 no se aplica cerca de los extremos de los datos suministrados. Utilice una
parábola de cuatro puntos en cada extremo para obtener las fórmulas
Se utilizarán cuatro puntos en vez de cinco, con la idea de que un quinto punto puede estar bastante
alejado de la posición de x0 o xN, donde se requiere una derivada. Dependiendo del tamaño de h, lo ajustado de los datos, y quizá otros factores, podrian emplearse fórmulas basadas en cinco o más puntos. Proce-
www.elsolucionario.org
376
21
MÉTODOS NUMÉRICOS
diendo para la parábola de cuatro puntos dejamos t = (x - X1)/h por lo que los primeros cuatro puntos tienen
argumentos t = - 1, 0, 1, 2. Las ecuaciones normales se convierten en
4a 0 + 2a1 + 6a2 = y0 + y1 + y2 + y3
2a0 + 6a1 + 8a 2 = -y0 + y2 + 2y3
6a0 + 8a1 + 18a2 = y0 + y2 + 4y3
y pueden resolverse como
20a 0 = 3y0 + 11y1 + 9y2 - 3y3
20a1
= - lly 0 + 3y1 + 7y2 + y3
4a 2 = y0 - y1 - y2 + y3
Con esto y y'(x0) = (a, - 2a2)lh, y'(x1) = a1/h se obtienen los resultados requeridos. Los detalles en el otro ex­
tremo de los datos proporcionados son casi idénticos.
21.21 Aplique las fórmulas del problema precedente a los datos de la tabla 21.1.
Encontramos
De modo similar y'(9) ≈ 16 y y'(10) ≈ 19. Los valores correctos son .50, .35, .17 y .16. Los pobres resulta­
dos que se obtuvieron en los puntos extremos constituyen otra evidencia de las dificultades de la diferencia­
ción numérica. La fórmula original de Newton
produce a partir de estos datos el valor .32, el cual es peor que nuestro .35. En el otro extremo la fórmula
correspondiente de diferencias hacia atrás maneja .25 que es mucho peor que nuestro valor de .19.
21.22 Aplique las fórmulas para derivadas aproximadas una segunda vez para estimar y"(x), empleando los datos
de la tabla 21.1.
Ya hemos obtenido estimaciones de la primera derivada, de una precisión de aproximadamente dos
lugares. Ellas son como sigue:
x
1
2
3
4
5
6
7
8
9
10
y' (x)
.35
.33
.31
.27
.24
.20
.18
.17
.16
.19
Aplicando ahora las mismas fórmulas a y'(x) se obtendrán estimaciones de y"(x). Por ejemplo, en x = 5,
que es otra vez casi 50% más grande que el valor correcto de -.022. Los resultados completos a partir de
nuestras fórmulas y los valores correctos se presentan a continuación:
www.elsolucionario.org
21
377
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
-y (calculada)
-y (correcta)
.011
.021
.028
.033
.033
.026
.019
.004
.012
-0.32
.250
.088
.048
.031
.022
.017
.013
.011
.009
.008
Cerca del centro tenemos un ocasional rayo de esperanza pero en los extremos, los malos resultados son
evidentes.
21.23 La parábola de mínimos cuadrados para siete puntos conduce a la fórmula de ajuste
(La deducción se pide en los problemas suplementarios.) Aplíquela a los datos de la tabla 21.1. ¿Produce
mejores valores que la fórmula de ajuste de cinco puntos?
Es posible añadir un renglón de diferencias de sexto orden a la tabla 21.1:
La fórmula produce entonces
y de modo similar y(6) ≈ 2.46, y(7) ≈ 2.65. Estos valores mejoran un poco los resultados de la fórmula de
cinco puntos, excepto para y(4) que es ligeramente menos correcto.
POLINOMIOS ORTOGONALES, CASO DISCRETO
21.24 En el caso de valores grandes de N y m el conjunto de ecuaciones normales puede estar bastante mal con­
dicionado. Para ver esto muestre que con x¡ igualmente espaciados de 0 a 1 la matriz de coeficientes es
aproximadamente
si se suprime un factor de N en cada término. Ésta es la matriz de Hilbert de orden m + 1.
Para N grande el área bajo y(x) - xk entre 0 y 1 será aproximadamente la suma de N áreas rectangu­
lares. (Véase la figura 21 -2.) Puesto que el área exacta está dada por una integral, tenemos
www.elsolucionario.org
378
MÉTODOS NUMÉRICOS
21
De tal modo sk ≈ N/( k + 1), y eliminando la N tenemos de inmediato la matriz de Hilbert. Se mostrará des­
pués que esta matriz resulta en extremo problemática para N grande.
Fig. 21-2
21.25 ¿Cómo pueden evitarse las matrices de Hilbert?
El problema precedente muestra que las ecuaciones normales que surgen con la base 1, x xm y
argumentos igualmente espaciados implican aproximadamente una matriz de Hilbert, la cual es problemáti­
ca. Desde la perspectiva computacional es más eficiente encontrar una base ortogonal de modo que las
ecuaciones normales se vuelvan triviales. En el siguiente problema se construye una base ortogonal conve­
niente. Es interesante notar que al desarrollar esta base trataremos directamente con la propia matriz de
Hilbert, no con aproximaciones de ella, y que el sistema de ecuaciones encontrado se resolverá en forma
exacta, evitando de esa manera las fallas del cálculo con sistemas mal condicionados. (Véase también el
capítulo 26.)
21.26 Construya un conjunto de polinomios Pm.N(t) de grados m = 0 , 1 , 2 , . . . tal que
Tales polinomios se denominan ortogonales sobre el conjunto de variables í.
Dejemos que el polinomio sea
donde t(i) es el factorial t(t - 1)...(t - i + 1). Primero hacemos el polinomio ortogonal a (t + s)(s) para s = 0 , 1 ,
. . . , m - 1, lo que equivale a que requiramos
Puesto que
sumando sobre los argumentos r y utilizando el problema 4.10 obtenemos
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
379
que será cero: Eliminando el factor (N + s + 1)(s+1), la suma se vuelve
y haciendo N(i)ci = ai, esto se simplifica a
para s = 0, 1 , . . . , m - 1. La matriz de Hilbert aparece otra vez en este conjunto de ecuaciones, aunque la
solución exacta del sistema conducirá aún a un algoritmo útil. Si la última suma se hubiera combinado en
un simple cociente tomaría la forma Q(s)/(s + m + 1 )(m+1) con Q(s) un polinomio a lo más de grado m. Puesto que Q(s) debe ser cero en los m argumentos s = 0 , 1 , . . . , m - 1 , debemos tener Q(s) = Cs(m), donde C
es independiente de s.
Para determinar C multiplicamos por (s + 1) tanto la suma como el cociente equivalente y tenemos
que debe ser válido para todo s excepto los ceros de los denominadores. Dejando s = - 1 , vemos que C m!/[(-1)(-2) ... (-m)] = (-1)m. Tenemos después de esto
El artificio que produce C origina ahora las ai. Multiplicando por (s + m + 1)](m + 1) y dejando entonces s -i - 1 para encontrar con respecto a i = 1 , . . . , m
y resolviendo después para
Recordando que ai = ciN(i), los polinomios requeridos pueden escribirse como
Lo que hemos probado es que cada Pm,N(t) es ortogonal a las funciones
1
t
+l
(t
+ 2 ) ( t + l)
...(t
+ m - 1 ) ( m - 1)
pero en el problema 4.18 vimos que las potencias 1, t, t2 tm - 1 pueden expresarse como combinaciones
de éstas, de manera que Pm,N(t) es ortogonal también a cada una de estas potencias. Por último, puesto que
Pn,N(t) es una combinación de estas potencias encontramos que los propios Pm,N(t) y Pn,N(t) son ortogonales.
Los primeros cinco de estos polinomios son
P0,N = 1
www.elsolucionario.org
380
MÉTODOS NUMÉRICOS
21
21.27 Determine los coeficientes ak de modo que
p(x) = a0P0,N(t) + a1P1, N (t) + ...+amPm,, N(t)
[con t = (x - x0)lh] sea el polinomio de mínimos cuadrados de grado m para los datos (xt , yt), t = 0,1
,N.
Minimizaremos
Haciendo cero las derivadas relativas a las ak, tenemos
Resolviendo para ak, encontramos
Ésta es una ventaja de las funciones ortogonales. Los coeficientes a» están desacoplados, apareciendo cada uno en una sola ecuación normal. Al sustituir las a» en p(x), tenemos el polinomio de mínimos cuadrados.
El mismo resultado se deduce directamente del teorema general de los problemas 21.7 y 21.8. Identificando E, S; y, (v1, v2), y ||v|| exactamente como antes, tomamos ahora uk = PkN(t) de manera que la proyección ortogonal siga siendo p = a0u0 + ... + amum. La ecuación normal k-ésima es (uk, uk)ak = (y, uk) y conduce a la expresión ya determinada para ak. Nuestra teoría general garantiza también ahora que hemos
minimizado en realidad S, y que nuestro p(x) es la solución única. Un argumento que utilice segundas derivadas podría también establecer esto aunque ahora no es necesario.
21.28 Muestre que el valor mínimo de S toma la forma
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
381
El desarrollo de la suma produce
El segundo término de la derecha es igual
El último término se anula por la
ortogonalidad excepto cuando j = k, en cuyo caso se vuelve
Reuniendo de nuevo las piezas,
Observe lo que sucede al mínimo de S cuando el grado m del polinomio de aproximación se incrementa.
Puesto que S es no negativo, la primera suma de Smín domina claramente al segundo. Pero este último aumenta con m, disminuyendo en forma estable el error. Cuando m = n sabemos por nuestro trabajo anterior
que existe un polinomio de colocación, igual a y, en cada argumento t = 0, 1
N. Esto reduce S a cero.
21.29 Aplique el algoritmo de funciones ortogonales para encontrar el polinomio de mínimos cuadrados de tercer
grado para los siguientes datos:
Xi
yi
Xi
yi
0
1
2
3
4
5
1.22
1.41
1.38
1.42
1.48
11
12
13
14
15
6
7
8
9
1
1.58
1.84
1.79
2.03
2.04
16
17
18
19
20
0
2.17
2.36 2.30 2.57 2.52 2.85 2.93 3.03 3.07 3.31 3.48
Los coeficientes a, se calculan directamente mediante la fórmula del problema precedente. En el caso
de cálculo manual, existen tablas para Wk y Pk,N(t) y deben usarse. Aunque tenemos la "información interna"
que requiere el tercer grado, es instructivo ir un poco más adelante. Hasta m = 5 encontramos a0 = 2.2276,
a1 = -1.1099, a 2 = .1133, a 3 = .0119, a4 = .0283, a5 = -.0038; y con x = t,
p(x) = 2.2276 - 1.1099P1,20 + . 1133P2,20 + .0119P3,20 + .0283P4,20 - .0038P5,20
Por la naturaleza de los desarrollos de la función ortogonal obtenemos aproximaciones de mínimos cuadrados de diversos grados mediante el truncamiento de este resultado. En la tabla 21.2 se presentan los valores de tales polinomios de grado uno a cinco, junto con los datos originales. La columna final lista los valores
de y(x) - (x + 50)3/105 a partir de los cuales los datos se obtuvieron sumando errores aleatorios de un tamaño de hasta .10. Nuestra meta ha sido recuperar este polinomio cúbico, eliminando tanto como podamos el
error mediante el ajuste por mínimos cuadrados. Sin el conocimiento previo de que nuestro objetivo era un
polinomio cúbico, habría cierta dificultad al elegir nuestra aproximación. Por fortuna, los resultados no difieren en forma considerable después de la aproximación lineal. Un cálculo del error RMS muestra que el polinomio cuadrático tiene, en este caso, un resultado superior que la aproximación cúbica.
www.elsolucionario.org
382
21
MÉTODOS NUMÉRICOS
Grado
12
RMS
.060
3
.014
4
.016
5 Dato
original
.023
.023
.069
Tabla 21.2
X
Datos
proporcionados
1
2
3
4
5
Resultados
correctos
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1.22
1.41
1.38
1.42
1.48
1.58
1.84
1.79
2.03
2.04
2.17
2.36
2.30
2.57
2.52
2.85
2.93
3.03
3.07
3.31
3.48
1.12
1.23
1.34
1.45
1.56
1.67
1.78
1.89
2.01
2.12
2.23
2.34
2.45
2.56
2.67
2.78
2.89
3.00
3.12
3.23
3.34
1.231
1.308
1.389
1.473
1.561
1.652
1.747
1.845
1.947
2.053
2.162
2.275
2.391
2.511
2.635
2.762
2.892
3.027
3.164
3.306
3.451
1.243
1.313
1.388
1.469
1.554
1.645
1.740
1.839
1.943
2.051
2.162
2.277
2.395
2.517
2.642
2.769
2.899
3.031
3.165
3.301
3.439
1.27
1.31
1.37
1.45
1.54
1.63
1.74
1.84
1.95
2.07
2.18
2.29
2.41
2.52
2.64
2.76
2.88
3.01
3.15
3.30
3.47
1.27
1.31
1.38
1.45
1.54
1.63
1.73
1.84
1.95
2.07
2.18
2.29
2.41
2.52
2.64
2.76
2.88
3.01
3.15
3.30
3.47
1.250
1.327
1.406
1.489
1.575
1.663
1.756
1.852
1.951
2.054
2.160
2.270
2.383
2.500
2.621
2.746
2.875
3.008
3.144
3.285
3.430
DATOS CONTINUOS, EL POLINOMIO DE M Í N I M O S CUADRADOS
21.30 Determine los coeficientes ai de modo que
[y(x) - a0P0(x) - a 1 P 1 ( x ) - . . . - a m P m ( x ) ] ² dx
sea un mínimo, siendo la función Pk(x) el k-ésimo polinomio de Legendre.
Aquí no es una suma de cuadrados lo que se minimizará sino una integral, y los datos ya no son valores discretos y, sino una función y(x) del argumento continuo x. El uso de los polinomios de Legendre es
muy conveniente. Como en la sección anterior ello reducirá las ecuaciones normales, las cuales determinan
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
383
ak, a un conjunto muy simple. Y puesto que cualquier polinomio puede expresarse como una combinación
de polinomios de Legendre, en realidad estamos resolviendo el problema de la aproximación del polinomio de
mínimos cuadrados para datos continuos. Dejando iguales a cero las derivadas usuales, tenemos
para k = 0 , 1 , . . . , m. Por la ortogonalidad de estos polinomios, estas ecuaciones se simplifican de inmediato a
Cada ecuación comprende sólo una de las ak de modo que
Otra vez en este caso es cierto que nuestro problema es un caso especial de los problemas 21.7 y
21.8, con las siguientes identificaciones:
E:
El espacio de las funciones de valor real en -1 ≤ x ≤ 1
S:
Polinomios de grado m o menor
y:
La función dato y(x)
(v1, v2):
El producto escalar
||v||:
La norma f
ukk::
PPk (x)
k(x)
pp::
akk::
v1(x)v2(x)dx
2
[v(x)]2 dx
dx
[v(x)]
a k Pak0 P
( x0)(x) + +• •. . •. ++ aa mm P
Pm
(x)
m (x)
(y, uukk)/(u
)l(ukk, uukk)
(y,
En consecuencia, estos problemas garantizan que nuestra solución p(x) es única y que minimiza la integral /.
21.31 Encuentre la aproximación por mínimos cuadrados a y(t) = t2 en el intervalo (0,1) mediante una linea recta.
Aquí nos estamos aproximando a un arco parabólico mediante un segmento de línea. Primero dejamos que t = (x + 1)/2 para obtener el intervalo ( - 1 , 1) en el argumento x. Esto hace y - (x + 1)2/4. Puesto
que P0(x) = 1 y P1 (x) = x, los coeficientes a0 y a1 son
y la linea de mínimos cuadrados es
www.elsolucionario.org
384
MÉTODOS NUMÉRICOS
21
En la figura 21-3 se muestran tanto el arco parabólico como la línea. La diferencia entre los valores y
en la línea y la parábola es t² - t + 1/6, y esto hace que los valores extremos en t = 0, 1/2 y 1 sean 1/6, -1/12 y 1/6. El
error que se produce al sustituir la línea por la parábola es, por consiguiente, ligeramente mayor en los extremos que en el centro del intervalo. Este error puede expresarse como
y la forma de P2(x) corrobora este comportamiento del error.
Fig. 21-3
21.32 Encuentre la aproximación por mínimos cuadrados a y(t) = sen t sobre el intervalo (0, π) mediante una
parábola.
Hagamos t = π(x + 1 )/2 para obtener el intervalo ( - 1 , 1) en el argumento x. Entonces y - sen [π(x +
1 )/2]. Los coeficientes son
por lo que la parábola es
La parábola y la curva seno se muestran en la figura 21-4, con ligeras distorsiones para destacar el comportamiento de la aproximación.
21.33 ¿Cuáles son los polinomios de corrimiento de Legendre?
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
385
Fig. 21-4
Resultan de un cambio de variable que convierte el intervalo ( - 1 , 1) en (0, 1). Hagamos t = (1 - x)/2 para
efectuar este cambio. Los familiares polinomios de Legendre en este argumento x se convierten entonces, en
y así sucesivamente. Estos polinomios son ortogonales sobre (0, 1) y podríamos haberlos usado como la
base de nuestro análisis por mínimos cuadrados de datos continuos en lugar de los polinomios estándar de
Legendre. Con este cambio de variable las integrales comprendidas en nuestras formulas para los coeficientes vienen a ser
El cambio de argumento t = (x + 1 )/2 también podría haberse utilizado, alterando el signo de cada polinomio
de grado impar, aunque el artificio empleado nos conduce a una analogía cercana a los polinomios ortogonales para el caso discreto que se trató en el problema 21.26.
21.34 Suponga que un experimento produce la curva que se muestra en la figura 21-5. Se sabe o se sospecha
que la curva debe ser una línea recta. Muestre que la línea por mínimos cuadrados está dada aproximadamente por y = .21 t + .11, la cual se muestra en forma interrumpida en el diagrama.
Fig. 21-5
www.elsolucionario.org
21
MÉTODOS NUMÉRICOS
386
En vez de reducir el intervalo a ( - 1 , 1) trabajamos directamente con el argumento t y los polinomios
de corrimiento de Legendre. Se necesitan dos coeficientes,
Puesto que y(t) se dispone ahora en forma analítica, estas integrales deben evaluarse mediante métodos
aproximados. De acuerdo con el diagrama, podemos estimar los valores y como sigue:
t
0
.1
.2
.3
.4
.5
.6
.7
.8
.9
1.0
y
.10 .17 .13 .15 .23 .25 .21 .22 .25 .29 .36
Después de esto la aplicación de la regla de Simpson produce a0 ≡ .214 y a1 ≡ -.105. La línea resultante es
y = .214 - .105(1 - 2t) = .21t + .11
y ésta aparece en la figura 21 -5. Un tratamiento alternativo de este problema podría implicar la aplicación
de los métodos para datos discretos a los valores y leídos en el diagrama.
DATOS CONTINUOS, UN TRATAMIENTO GENERALIZADO
21.35 Desarrolle el polinomio de mínimos cuadrados en términos de un conjunto de polinomios ortogonales sobre
el intervalo (a, b) con función de peso no negativa w(x).
Los detalles son muy similares a los de las deducciones anteriores. Minimizaremos
mediante la elección de los coeficientes a», donde las funciones Qk(x) satisfacen la condición de ortogonalidad
para j ≠ k. Sin detenerse por el argumento duplicado que implica las derivadas, recurrimos de inmediato a
los problemas 21.7 y 21.8, con el producto escalar
asi como otras identificaciones obvias, y encontramos
www.elsolucionario.org
21
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
387
Con estas a» el polinomio por mínimos cuadrados es p(x) = a0Q0(x) + ... + amQm(x).
21.36 ¿Cuál es la importancia del hecho de que ak no dependa de m?
Esto significa que el grado del polinomio de aproximación no tiene que ser elegido al principio del
cálculo. Las ak pueden calcularse sucesivamente y la decisión de cuántos términos usar puede basarse en
las magnitudes de las ak calculadas. En desarrollos no ortogonales un cambio de grado requerirá casi siempre que se vuelvan a calcular todos los coeficientes.
21.37 Muestre que el valor mínimo de / puede expresarse en la forma
donde
Al escribir en forma explícita toda la integral se produce
El segundo término a la derecha es igual a
El último término se anula por la
ortogonalidad excepto cuando j - k, en cuyo caso se vuelve
² Demuestre la desigualdad de Bessel,
21.39 Pruebe que la serie
Wka²k
Reuniendo de nuevo las partes,
w(x)y²(x) dx.
Wka²k es convergen
.
Es una serie de términos positivos con sumas parciales acotadas por arriba por la integral en la desigualdad de Bessel. Esto garantiza la convergencia. Desde luego, se supone siempre que existen las integrales que aparecen en nuestro análisis, en otras palabras estamos trabajando con funciones que son integrables sobre el intervalo (a, b).
21.40 ¿Es cierto que al tender m al infinito el valor de /min tiende a cero?
Con las familias de funciones ortogonales que se utilizan ordinariamente, la respuesta es afirmativa.
El proceso se denomina convergencia en la media y se denomina completo el conjunto de funciones ortogonales. Los detalles de la demostración son más amplios de lo que se ha intentado aquí.
APROXIMACIÓN CON POLINOMIOS DE CHEBYSHEV
21.41 Los polinomios de Chebyshev están definidos para -1 < x < 1 por Tn(x) = cos (n arcos x). Encuentre directamente, el primero de estos polinomios a partir de la definición.
www.elsolucionario.org
21
MÉTODOS NUMÉRICOS
388
Para n = 0 y 1 tenemos de inmediato T0(x) = 1, T01(x) = x. Sea A - arcos x. Entonces
T2(x) = cos 2A=2 cos2 A - 1 = 2x2 - 1
T3(x) = cos 3A =4 cos3 cos A - 3 cos A = 4X3 — 3X, etc.
21.42 Pruebe la relación recurrente Tn+1(x) = 2xTn(x) - Tn-1(x).
La relación trigonométrica cos (n + 1)A + cos (n - 1)A = 2 cos A cos nA la convierte directamente en
Tn+1(x) + Tn-1(x) = 2xTn(x).
21.43 Utilice la recurrencia para producir algunos polinomios de Chebyshev.
Empezando con n - 3,
T4(x) = 2x(4x3 - 3x) - (2x2 - 1) = 8x4 - 8x2 + 1
T5(x) = 2x(8x4 + 1) - (4X 3 - 3x) = 16x5 - 20x3 + 5x
T6(x) = 2x(16xs - 20x3 + 5x) - (8x4 - 8x2 + 1) = 32x6 - 4x4 + 18x2 - 1
T7(x) = 2x(32x6 - 4x4 + 1x2 - 1) - (16x5 - 2x3 + 5x) = 64x7 - 112x5 + 56x3 21.44 Pruebe la propiedad de ortogonalidad
Sea x = cos A como antes. La integral anterior se transforma en
para m ≠ n. Si m = n = 0, el resultado Π es inmediato. Si m - n k 0, la integral es
21.45 Exprese las potencias de x en términos de polinomios de Chebyshev.
Encontramos
1=
T0
x =T1
x2=1/2(T0+T2 )
y así sucesivamente. Es claro que el proceso puede continuar para cualquier potencia.
www.elsolucionario.org
7X
etc.
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
389
21.46 Encuentre el polinomio de mínimos cuadrados que minimiza la integral
Por los resultados de la sección anterior los coeficientes ak son
El polinomio de mínimos cuadrados es a0T0(x) + • • • + amTm(x).
excepto para a0 que es
21.47 Muestre que Tn(x) tiene n ceros dentro del intervalo ( - 1 , 1) y ninguno en el exterior. ¿Cuál es la propiedad
del "rizo igual"?
Puesto que Tn(x) - cos nθ, con x = cos θ y - 1 x ≤ 1, podemos pedir 0 ≤ θ ≤ π sin que haya compli­
caciones. En realidad esto hace que la relación entre θ y x sea más precisa. Claramente Tn(x) es cero para
θ-(2/+1)π/2n, o
xi = cos
(2i + 1)π
2n
i = O, 1, . . . , n - 1
Éstos son n argumentos distintos entre - 1 y 1. Puesto que Tn(x) tiene sólo n ceros, ninguno puede estar
fuera del intervalo. Siendo igual a un coseno en el intervalo ( - 1 , 1), el polinomio Tn(x) no puede exceder,
ahí, a uno en magnitud. Alcanza su tamaño máximo en argumentos π + 1, incluso en los puntos extremos
Esta oscilación entre valores extremos de igual magnitud se conoce como la propiedad de rizo igual. Esta
propiedad se ilustra en la figura 21-6, la cual muestra T2(x), T3(x), T4(x) y T6(x).
Fig. 21-6
www.elsolucionario.org
390
MÉTODOS NUMÉRICOS
21.48 ¿De qué manera la propiedad de rizo igual hace superior la aproximación de mínimos cuadrados
a aproximaciones similares empleando otros polinomios en lugar del Tk(x)?
Supongamos que asumimos que, para un y(x), la serie que se obtiene dejando que m tienda a infinito
converja a y(x) y también que los hace suficientemente rápido de modo que
y(x) - a0T0(x) - • • • - amTm(x) = am+l Tm+1 (x)
En otras palabras, el error que se efectúa al truncar la serie es en esencia el primer término omitido. Como
Tm+1(x) tiene la propiedad de rizo igual, el error de nuestra aproximación fluctuará entre a m+1 y -am-+1 a través
de todo el intervalo (-1,1). El error no será esencialmente más grande sobre una parte del intervalo compa­
rada con otra. Esta uniformidad del error puede verse como una recompensa por la aceptación del incómo­
do factor de peso
en las integrales.
21.49 Encuentre la recta de mínimos cuadrados para y(r) = f2 sobre el intervalo (0, 1) empleando la función de
peso
El cambio de argumento t = (x + 1 )/2 convierte el intervalo en ( - 1 , 1) en el argumento x, y hace y Notamos primero el resultado elemental
entonces el coeficiente a0 se vuelve (véase el problema 21.46)
y como y(x)T1(x) es
tenemos
El polinomio de mínimos cuadrados es, en consecuencia,
Hay un segundo camino mucho más breve para este resultado. Empleando los resultados del proble­
ma 21.45,
Truncando esto después de los términos lineales, tenemos de inmediato el resultado recién encontrado.
Además, vemos que el error es, en el caso de este polinomio cuadrático, precisamente la función de rizo
igual T2(x)/8. Esto es, por supuesto, una consecuencia de la serie de polinomio de Chebyshev que finaliza
con este término. En la mayor parte de las funciones el error será sólo en forma aproximada el primer térmi­
no omitido, y en consecuencia sólo aproximadamente un error de rizo igual. Comparando los errores extre­
mos aquí
con aquellos del problema 12.23 que f u e r o n v e m o s que la aproximación presen­
te sacrifica algo de precisión en el centro por una mejor precisión en los extremos, más la característica de
rizo igual. Ambas lineas se muestran en la figura 21-7.
www.elsolucionario.org
391
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
Fig. 21-7
21.50 Encuentre una aproximación cúbica en términos de polinomios de Chebyshev para
Las integrales que deben calcularse para obtener los coeficientes del polinomio de mínimos cuadra­
dos con función de peso
son demasiado complicadas en este caso. En vez de ello, ilustra­
remos el proceso de economización de polinomios. Empezando con
sen x
1
6
1
120
sustituimos las potencias de x por sus términos equivalentes en términos de los polinomios de Chebyshev,
utilizando el problema 21.45
senx
1
24
1
1920
169
192
5
128
1
1920
Los coeficientes aquí no son exactamente tas a* del problema 21.46 puesto que las potencias de mayor or­
den de x de la serie del seno harían contribuciones adicionales a los términos T1 T3 y T5. Pero esas contri­
buciones serían relativamente pequeñas, en particular para los primeros términos Tk. Por ejemplo, el térmi­
no x5 ha alterado el término T1, en menos del 1 por ciento, y el término x7 lo alteraría en menos del .01 por
ciento. En contraste el término x5 ha alterado el término T3 en cerca de 6 por ciento, aunque x7 contribuirá
sólo con alrededor del .02 adicional. Esto indica que el truncar nuestro desarrollo nos brindará una aproxi­
mación cercana al polinomio cúbico de mínimos cuadrados. En consecuencia, tomamos para nuestra apro­
ximación
La precisión de esta aproximación puede estimarse notando que hemos hecho dos "errores de truncamien­
to," empleando primero sólo tres términos de la serie de potencias para el seno x y, segundo, al omitir T5.
Ambos afectan el cuarto lugar decimal. Naturalmente, se logra mayor precisión si buscamos un polinomio
de mínimos cuadrados de mayor grado, pero incluso el que tenemos tiene una precisión comparable al del
polinomio de Taylor de quinto grado con el que empezamos. Los errores de nuestro polinomio cúbico pre­
sente, así como el polinomio cúbico de Taylor, obtenidos al omitir el término x5, se comparan en la figura 21 -8.
El cúbico de Taylor es mejor cerca de cero, pero es evidente la propiedad de error casi igual del polinomio
de mínimos cuadrados y debe compararse con T5(x).
www.elsolucionario.org
392
MÉTODOS NUMÉRICOS
Error de Taylor
Error
presente
Fig. 21-8
21.51 Pruebe que para m y n menores que N,
donde
De la definición trigonométrica de los polinomios de Chebyshev, encontramos directamente
Puesto que
ambas sumas de cosenos pueden condensarse. Sin embargo,
es más simple notar que cuando m + π o m-n es cero cada suma se anula por simetría, siendo igualmente
espaciados los ángulos A¡ entre 0 y π. Esto prueba, en realidad, el resultado para
Si
la se­
gunda suma contribuye N//2, en tanto que si m = n = 0 ambas sumas totalizan N. Debe observarse que los
polinomios de Chebyshev son ortogonales tanto en la suma como en la integración. Esto es a menudo una
ventaja sustancial, ya que las sumas son bastante más fáciles de calcular que las integrales de funciones
complicadas, en particular cuando el factor
aparece en las últimas pero no en las primeras.
21.52 ¿Qué elección de coeficientes ak minimizará
donde las xi son los argumentos del problema precedente?
Con la identificación apropiada resulta directamente de los problemas 21.7 y 21.8 que la proyección
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
393
ortogonal p = a0T0 + • • • + amTm determinada por
proporciona el mínimo. Empleando el problema 21.51 los coeficientes son
Para m = N - 1 tenemos el polinomio de colocación para los N puntos
21.53 Encuentre la línea de mínimos cuadrados para
y la suma mínima es cero.
sobre (0,1) por el método del problema 21.52.
Ya hemos encontrado una recta que minimiza la integral del problema 21.46. para minimizar la suma
del problema 21.52, elegimos
como antes. Supongamos que empleamos sólo dos puntos, por
lo que N = 2. Estos puntos tendrán que ser
Por tanto,
Ésta es la misma recta que antes y al utilizar una N más
y la línea está dada por
grande se reproduciría otra vez. La explicación de esto es, simplemente, que la propia y puede repre­
sentarse en la forma y - a0T0 + a. T1 + a2T2 y, puesto que las Tk son ortogonales con relación tanto a la inte­
gración como a la suma, la recta de mínimos cuadrados en cualquier sentido se obtiene por truncamiento.
(Véase el último párrafo del problema 21.8.)
21.54 Encuentre rectas de mínimos cuadrados para y(x) - x sobre ( - 1 , 1) minimizando la suma del problema
21.52.
En este problema la recta que obtengamos dependerá un poco del número de puntos que utilicemos.
como antes. En consecuencia
Primero tomemos N = 2, lo que significa que emplearemos x0 = -x1 =
Eligiendo N = 3 encontramos
Esto hace
Tomando el caso general de N puntos, tenemos xi - cos Ai y
www.elsolucionario.org
394
MÉTODOS NUMÉRICOS
por la simetría de las Ai en el primero y el segundo cuadrantes. También,
Como las Ai son los ángulos π/2/V, 3π/2N, . . . , (2N - 1)π/2N, los ángulos dobles son π/N, 3π/N (2N 1)π/N y éstos están simétricamente espaciados alrededor del círculo completo. La suma de los cos 2Ai es,
en consecuencia, cero. Excepto cuando N = 2, la suma de los cos
será también cero de modo que a, para N = 2. Para N tendiendo a infinito tenemos así la convergencia trivial a la recta p(x) - 3T1/4 - 3x/4.
Si adoptamos el planteamiento de la integral mínima, encontramos entonces
lo cual nos lleva a la misma recta.
El ejemplo presente puede servir como ilustración elemental adicional del algoritmo del problema
21.52, pero el resultado se encuentra y se entiende más fácilmente notando que
y recu­
rriendo otra vez al corolario en el problema 21.8 para obtener 37 t /4 o 3x/4 por truncamiento. El proceso de
truncamiento fracasa para N = 2 puesto que entonces los polinomios To, T1 T2, T3 no son ortogonales. (Véa­
se el problema 21.51.)
21.55 Encuentre rectas de mínimos cuadrados para y(x) - |x| sobre ( - 1 , 1) minimizando la suma del problema
21.52.
Con N = 2 encontramos rápidamente
se obtienen también con facilidad. Para N arbitraria,
Con N - 3 los resultados de
donde / es (N - 3)/2 para N impar, y (N - 2)/2 para N par. Esta suma trigonométrica puede evaluarse me­
diante un desarrollo abreviado o bien de otra manera, con el resultado
Es otra consecuencia de la simetría que a, = 0 para toda N. Para N tendiendo a infinito resulta ahora que
A medida que se usan más y más puntos, se va llegando a la recta límite. Regresando al planteamiento de
la integral mínima, anticipamos desde luego la misma recta. El cálculo produce
y así nos llevamos una decepción. La recta límite es la recta continua que se muestra en la figura 21-9.
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
395
Fig. 21-9
21.56 Aplique el método de los problemas anteriores a la curva producida en forma experimental de la figura 21-5.
Para tal función, de carácter analítico desconocido, cualquiera de nuestros métodos debe implicar la
discretización en algún punto. Ya hemos elegido un conjunto de valores discretos de la función para em­
plearlo con la regla de Simpson, manteniendo así, al menos en espíritu, la idea de minimizar una integral.
Podríamos haber empleado el mismo conjunto equidistante de argumentos y minimizar una suma. Sin em­
bargo, con la idea de obtener un factor más cercano de rizo igual, elegimos ahora los argumentos xi =
cos Ai = 2ti - 1. Con 11 puntos, el número empleado antes, los argumentos xi - cos Ai = cos [(2i + 1)π/22] y
los valores correspondientes ti así como los y,, leídos a partir de la curva, son como sigue:
.99
.91
.75
.54
.28
.00
-.28
-.54
-.75
-.91
-.99
1.00
.96
.88
.77
.64
.50
.36
.23
.12
.04
.00
.36
.33
.28
.24
.21
.25
.20
.12
.17
.13
.10
Los coeficientes vienen a ser
haciendo la recta p(x) = .22 + .11x = .11x = .22t + .11 que es casi indistinguible del resultado anterior. Las
inexactitudes de los datos no han justificado la complejidad extra.
Problemas suplementarios
21.57 Los marcadores promedio reportados por golfistas de diferentes handicaps en un hoyo par cuatro fueron
como sigue:
Handicap
6
8
10
12
14
16
18
20
22
24
Promedio
4.6
4.8
4.6
4.9
5.0
5.4
5.1
5.5
5.6
6.0
www.elsolucionario.org
396
MÉTODOS NUMÉRICOS
Encuentre la recta de mínimos cuadrados para estos datos.
21.58 Emplee la línea de mínimos cuadrados del problema anterior para ajustar los datos informados.
21.59 Estime la tasa a la cual los marcadores promedio se incrementan por handicap unitario.
21.60 Encuentre la parábola de mínimos cuadrados para los datos del problema 21.57. ¿Difiere en forma notable
de la recta que acaba de encontrarse?
21.61 Cuando las xi y las y¡ están sujetas a errores de aproximación del mismo tamaño, se ha argumentado que
la suma de cuadrados de las distancias perpendiculares a la recta debe minimizarse, en lugar de la suma
de los cuadrados de las distancias verticales. Muestre que esto requiere minimizar
Encuentre después las ecuaciones normales y muestre que M está determinada por una ecuación cuadrá­
tica.
21.62 Aplique el método del problema anterior a los datos del problema 21.57. ¿La nueva recta difiere mucho de
la que se encontró en ese problema?
21.63 Encuentre la recta de mínimos cuadrados para los tres puntos (x0, y0), (x1, y1) y (x2, y2) mediante el método
del problema 21.1. ¿Cuáles son realmente los signos de los tres números y(xi) - yi?
21.64 Muestre que para los datos
2.2
2.7
3.5
4.1
65
60
53
50
la introducción de y = log P y el cálculo de la recta de mínimos cuadrados para los pares de datos (xi yi)
conduce a la larga a P = 91.9x-43.
21.65 Encuentre una función del tipo P = AeMx para los datos
21.66 Muestre que la parábola de mínimos cuadrados para siete puntos conduce a la fórmula ajustada
siguiendo los procedimientos de los problemas 21.12 y 21.13.
www.elsolucionario.org
397
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
21.67 Aplique la fórmula precedente para ajustar los cuatro valores centrales yt de la tabla 21.1. Compare con las
raíces correctas y note si esta fórmula produce, o no, mejores resultados que la fórmula de cinco puntos.
21.68 Emplee la parábola de siete puntos para deducir la fórmula de diferenciación aproximada
(- 3y k-3 - 2y k-2 - y k-1 + y k + 1 + 2yk+2 + 3yk+3)
21.69 Aplique la fórmula precedente para estimar y'(x) para x - 4, 5, 6 y 7 partiendo de los valores y¡ de la tabla
21.1. ¿Cómo se comparan estos resultados con los obtenidos por la parábola de cinco puntos? (Véase el
problema 21.19.)
21.70 Los siguientes son los valores de y(x) - x2 con errores aleatorios de -.10 a .10 añadidos. (Los errores se
obtuvieron extrayendo cartas de un paquete ordinario en las que se habían eliminado las cartas de figura,
significando el color negro, más y el rojo, menos.) También se incluyen los valores correctos Ti.
1.0
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2.0
.98
1.23
1.40
1.72
1.86
2.17
2.55
2.82
3.28
3.54
3.92
1.00
1.21
1.44
1.69
1.96
2.25
2.56
2.89
3.24
3.61
4.00
Aplique las fórmulas de ajuste de los problemas 21.13 y 21.15. Compare los valores RMS de los valores ori­
ginales y de los ajustados.
21.71 Aplique la fórmula de diferenciación del problema 21.18, para los siete argumentos centrales. Aplique
también la fórmula obtenida a partir del polinomio de Stirling (véase el problema 21.19). ¿Cuál produce la
mejor aproximación a y'(x) - 2x? Observe que en este ejemplo la función "verdadera" es en realidad una
parábola por lo que excepto para los errores aleatorios que se incluyeron tendríamos resultados exactos.
¿Ha penetrado la parábola de mínimos cuadrados a través de los errores al grado de producir información
acerca de la verdadera y'(x)?
21.72 ¿Cuál es la parábola de mínimos cuadrados para los datos del problema 21.70? Compárela con y(x) - x2.
21.73 Emplee las fórmulas del problema 21.20 para estimar y'(x) cerca de los extremos de los datos que se
proporcionaron en el problema 21.70.
21.74 Estime y"(x) partiendo de sus valores calculados y'(x).
21.75 Los siguientes son los valores de sen x con errores aleatorios de -.10 a .10 agregados. Encuentre la
parábola de mínimos cuadrados y utilícela para calcular valores ajustados. Aplique también el método del
problema 21.13 que usa una parábola diferente de mínimos cuadrados en cada punto para ajustar los
datos. ¿Cuál funciona mejor?
www.elsolucionario.org
398
MÉTODOS NUMÉRICOS
X
0
.2
.4
.6
.8
1.0
1.2
1.4
1.6
senx
-.09
.13
.44
.57
.64
.82
.97
.98
1.04
21.76. Un procedimiento de ajuste simple y antiguo, que aún se utiliza, es el método de movimiento de promedios.
En este método cada valor yi es sustituido por su propio promedio y el de sus vecinos cercanos. Por
ejemplo, si se utilizan dos vecinos en cada lado, la fórmula es
(yi-2 + y i - x + y i + yi+1+yi+2)
donde pi es el sustituto ajustado para y,. Aplique ésta a los datos del problema precedente. Imagine un mé­
todo para ajustar los valores extremos para los cuales no se dispone de dos vecinos en un lado.
21.77 Aplique el método de movimiento de promedios, empleando sólo un vecino en cada lado, a los datos del
problema 21.75. La fórmula para argumentos interiores será
Idee una fórmula para ajustar los valores extremos.
21.78 Aplique la fórmula del problema precedente a los valores y(x) = x3 presentados a continuación, obteniendo
los valores p¡ listados.
0
1
0
1
3
2
3
4
5
6
7
8
27
64
125
216
343
12
33
72
135
228
Demuestre que estos valores cúbicos pertenecen a una función cúbica diferente. Aplique la fórmula del mo­
vimiento de promedios a los valores pi para obtener una segunda generación de valores ajustados. ¿Puede
usted decir lo que sucede cuando se calculan generaciones sucesivas, suponiendo que los valores yi que
se proporcionan aumentan en ambos extremos en forma indefinida?
21.79 Aplique el método de movimiento de promedios para ajustar los siguientes datos oscilantes.
0
1
0
1
2
3
0
4
-1
5
0
6
1
www.elsolucionario.org
7
0
8
-1
0
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
399
¿Qué sucede si se calcula un gran número de generaciones de mayor orden de datos ajustados? Es fácil
observar que el ajuste excesivo puede alterar por completo el carácter de un suministro de datos.
21.80. Emplee polinomios ortogonales para encontrar la misma recta de mínimos cuadrados que se obtuvo en el
problema 21.2.
21.81 Utilice polinomios ortogonales para encontrar la misma parábola de mínimos cuadrados que se determinó
en el problema 21.10.
21.82 Emplee polinomios ortogonales para encontrar el polinomio de mínimos cuadrados de cuarto grado para los
datos de raíz cuadrada del problema 21.14. Utilice este solo polinomio para ajustar los datos. Calcule el
error RMS de los valores ajustados. Compare con los que se dieron en el problema 21.17.
21.83 Los siguientes son los valores de ex con errores aleatorios de -.10 a .10 agregados. Utilice polinomios or­
togonales para encontrar el polinomio cúbico de mínimos cuadrados. ¿Qué tan exacto es este último?
0 .1
.92
.2
1.15
.3
1.22
.4
.5
.6
.7
.8
.9
1.0
1.44
1.66
1.79
1.98
2.32
2.51
2.81
1.44
21.84 Los siguientes son los valores de la función de Bessel J0(x) con errores aleatorios de -.010 a .010
agregados. Emplee polinomios ortogonales para encontrar una aproximación por mínimos cuadrados. Elija
el grado que usted considera apropiado. Después ajuste los datos y compare con los resultados correctos
que también se proporcionan.
0
1
2
3
4
5
6
.994
.761
.225
-.253 -.400 -.170
1.00
.765
.224
-.260 -.397 -.178
7
8
9
1
0
.161
.301
.177
-.094 -.240
.151
.300
.172
-.090 -.246
21.85 Encuentre la recta de mínimos cuadrados para y(x) = x2 en el intervalo (-1,1).
21.86 Encuentre la recta de mínimos cuadrados para y(x) = x3 en el intervalo (-1,1).
21.87 Encuentre la parábola de mínimos cuadrados para y(x) - x3 en el intervalo (-1,1).
21.88 Encuentre en forma aproximada la parábola de mínimos cuadrados para la función de la figura 21-10,
evaluando las integrales mediante la regla de Simpson. Esta curva debe imaginarse como un resultado ex­
perimental, que de acuerdo con la teoría debería haber sido una parábola.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
400
Fig. 21-10
21.89 Muestre que la serie de Chebyshev para arcsen es
evaluando las integrales coeficiente directamente. Efectúe un truncamiento después de T3 para obtener el
polinomio cúbico de mínimos cuadrados para esta función. Calcule el error real del polinomio cúbico y com­
pare con el primer término omitido (el término T5). Note el comportamiento de rizo (casi) igual del error.
21.90Encuentre la recta de mínimos cuadrados para y(x) = x2 en el intervalo (-1,1) con la función de peso w(x) =
Compare esta recta con la que se encontró en el problema 21.85. ¿Cuál tiene la propiedad de
rizo igual?
21.91Encuentre la parábola de mínimos cuadrados para y(x) = x3 en el intervalo ( - 1 , 1) con la función de peso
Compárela con la parábola encontrada en el problema 21.87.
21.92 Represente y(x) = e" mediante términos de su serie de potencias hasta x7. El error estará en el quinto lugar
decimal para x cercana a uno. Vuelva a acomodar la suma en polinomios de Chebyshev. ¿Cuántos
términos pueden omitirse en esas condiciones sin afectar seriamente el cuarto lugar decimal? Reacomode
el polinomio truncado en la forma estándar. (Éste es otro ejemplo de la economización de un polinomio.)
21.93 Muestre que para y(x) = Tn(x) = cos (n arccos x) = cos nA resulta que y'(x) - (π sen nA)/(sen A). Muestre
después que (1 - x2)y" - xy' + n2y = 0, es la ecuación diferencial clásica de los polinomios de Chebyshev.
21.94 Muestre que Sn(x) = sen (n arccos x) satisface también la ecuación diferencial del problema 21.93.
21.95 Sea
pruebe la recurrencia Un+1(x) = 2xU n (x)-U n-1 (x).
21.96 Compruebe que U0(x) = 0, U1(x) = 1 y aplique después la recurrencia para verificar que U2(x) - 2x, U3(x) =
4x2 - 1, U4(x) = 8x3 - 4x, U5(x) = 16x4 - 12x2 + 1, U6(x) - 32x5 - 32x3 + 6x, U7(x) = 64X6 - 80x4 + 24x2 - 1.
21.97 Demuestre que Tm+1(x) + Tm-n(x) = 27m(x)Tn(x) y deje entonces m = n para obtener
T2n(x) = 2Tn2(x)-l
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MÍNIMOS CUADRADOS
21.98
Utilice el resultado del problema 21.97 para encontrar T8, T16 y T32.
21.99
Pruebe que
401
y deduzca entonces que
T'2n+1 = 2(2n + 1)(T2n + T2n-2 + • • • + T2) + 1
T'2n
= 2(2n)(T2n-1 + T2n-3 + • • • + T1)
21.100 Demuestre que T2n-1 - x(2T2n - 2T2n-2 + 2T2n-4 + • • • ± T0).
21.101 Economice el resultado In
reacomodando en polinomios de Chebyshev y
reteniendo después sólo los términos cuadráticos. Muestre que el resultado final In
tiene aproximadamente la misma precisión que la parte de cuarto grado de la aproximación original.
representándolo primero como una combinación de
21.102 Economice el polinomio
polinomios de Chebyshev y truncándolo después hasta dos términos. Compare el resultado con 1 + x +
considerando ambos casos como aproximaciones a ex. ¿Cuál es la mejor aproximación? ¿En qué
sentido?
21.103 Muestre que el cambio de argumento x = 2t- 1, el cual convierte el intervalo (0, 1) en términos de t, con­
vierte también los polinomios de Chebyshev en lo siguiente, que puede emplearse en lugar de los
polinomios clásicos si se considera más conveniente el intervalo (0,1):
T0*(x) = l T*1(x) = 2 t - l T2*(x) = 8 t 2 - 8 t + l T3*(x) = 32t3 - 48t2 + 18t - 1
etc.
Pruebe también la recurrencia Tn+1*(t) - ( 4 t - 2)Tn*(t) - Tn-1*(t).
21.104 Pruebe que
y que, para n > 1,
21.105 Muestre que la misma recta encontrada con N - 2 en el problema 21.53 aparece también para N ar­
bitraria.
21.106 Emplee el método del problema 21.52 para obtener una parábola de mínimos cuadrados para y(x) - x3
sobre ( - 1 , 1) eligiendo N = 3. Muestre que se obtiene el mismo resultado para N arbitraria y también por
medio del método de minimización de la integral del problema 21.91.
21.107 Encuentre las parábolas de mínimos cuadrados para y(x) = |x| sobre ( - 1 , 1) y para N arbitraria. Muestre
también que cuando N tiende a infinito esta parábola se aproxima a la parábola de la integral mínima.
21.108 Aplique el método del problema 21.52 a los datos experimentales de la figura 21-10. Utilice el resultado
para calcular valores ajustados de y(x) en x - -1 (.2)1.
21.109 Ajuste los siguientes datos experimentales adaptando un polinomio de mínimos cuadrados de quinto
grado:
www.elsolucionario.org
402
MÉTODOS NUMÉRICOS
0 5
0
10
.127
15
.216
20
.286
.344
25
30
35
40
45
50
.387
.415
.437
.451
.460
.466
21.110 La siguiente tabla proporciona el número y de estudiantes que obtienen la calificación x en un examen.
Para utilizar estos resultados como una norma estándar, ajusta dos veces los números y, empleando la
fórmula de ajuste
( - 3y0 + 12y1 + 17y2 + 12y3 - 3y4)
Se supone que y = 0 para valores no listados de x.
100
95
90
85
80
75
70
65
60
55
50
45
0
13
69
147
208
195
195
126
130
118
121
85
40
35
30
25
20
15
10
5
0
93
75
54
42
30
34
10
8
1
21.111 Encuentre el polinomio de mínimos cuadrados de segundo grado para los siguientes datos. Obtenga
después valores ajustados.
.78
1.56
2.34
3.12
3.81
2.50
1.20
1.1.2
2.25
4.28
www.elsolucionario.org
Aproximación polinomial
por minimax
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE.
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el concepto de aproximación polinomial mediante minimax
(Introducción).
2. Explicar con sus propias palabras cuando menos cinco ventajas y cinco desventajas de aproximación
polinomial mediante minimax (Introducción).
3.
Efectuar el desarrollo matemático para encontrar la ecuación única de la recta minimax con datos
discretos (línea de Chebyshev, línea de error equivalente) (Introducción, Problemas 22.1 a 22.4).
4.
Demostrar matemáticamente que para que la ecuación de la recta minimax sea única, los datos de
las abscisas (X¡) deben ser diferentes entre sí (Introducción, Problema 22.36).
5. Dado un conjunto de puntos experimentales, encontrar los parámetros del modelo lineal, utilizando el
criterio minimax (Introducción, Problemas 22.2, 22.5, 22.8).
6. Elaborar y aplicar el algoritmo del método de intercambio para encontrar una recta única de
aproximación minimax con datos discretos (Introducción, Problemas 22.5 a 22.8, 22.32 a 22.35).
7. Efectuar el desarrollo matemático para encontrar un polinomio (de segundo grado) único de
aproximación minimax con datos discretos, haciendo una generalización a partir del caso lineal
(Introducción, Problemas 22.9, 22.10, 22.31,22.37 a 22.40).
8. Dado un conjunto de puntos experimentales, encontrar los parámetros del modelo cuadrático o
cúbico, utilizando el criterio minimax (Introducción, Problemas 22.9, 22.10, 22.37 a 22.40).
9. Comparar los resultados de la aplicación de la aproximación lineal mediante mínimos cuadrados con la
minimax; y verificar que la primera minimiza la suma de los errores al cuadrado y la segunda minimiza
el error máximo (Introducción, Problema 22.32).
10. Demostrar matemáticamente el teorema de aproximación polinomial de Weierstrass, para datos
continuos, empleando los polinomios de Bernstein (Introducción, Problemas 22.11 a 22.16).
11. Efectuar el desarrollo matemático para encontrar una aproximación por minimax para datos continuos,
empleando los polinomios de Chebyshev (Introducción, Problemas 22.17 a 22.23, 22.49).
12. Aplicar los polinomios de Chebyshev para efectuar la aproximación por minimax para datos
continuos en problemas de ejemplo (Introducción, Problemas 22.24 a 22.29, 22.41 a 22.45).
13. Aplicar el algoritmo del método de intercambio para encontrar una recta única de aproximación
minimax con datos continuos (Introducción, Problemas 22.5, 22.30, 22.31, 22.46, 22.47).
14. De acuerdo con su criterio y justificando su elección con los conocimiento adquiridos en este capítulo;
aplicar las fórmulas adecuadas para encontrar una aproximación por minimax en problemas de
ejemplo que le proporcionen un balance entre el grado del polinomio de aproximación y el error
(Problemas 22.41 a 22.43, 22.48, 22.50 a 22.54).
www.elsolucionario.org
404
MÉTODOS NUMÉRICOS
APLICACIONES DE LA APROXIMACIÓN POLINOMIAL POR MINIMAX:
Este capítulo trata nuevamente acerca de la aproximación polinomial; sin embargo los métodos minimax son
más sofisticados que los vistos en capítulos previos, y por lo mismo normalmente no se incluyen en cursos introductorios de métodos numéricos. A este criterio se le llama el principio minimax, debido a que "minimiza el
máximo error". La aplicación del principio minimáx es posible cuando tenemos la libertad de elegir los puntos
base. Afortunadamente éste es un caso que ocurre frecuentemente en la práctica, ya que dentro del trabajo experimental podemos tener control sobre los valores de la variable independiente, los cuales podrán ser empleados posteriormente como puntos base para una aproximación polinomial.
En muchas de las ramas de la industria y de la ciencia, los métodos de mediciones experimentales
pueden ser inexactos y las mediciones en sí mismas pueden restringirse en cantidad; por lo mismo en algunos
casos y dependiendo del problema en particular deberá elegirse entre mínimos cuadrados que minimiza la suma
de los errores al cuadrado y minimáx que minimiza el error máximo.
Dentro de este capítulo encontraremos otra justificación para emplear polinomios, en el teorema de
aproximación de Weierstrass, el cual establece que sobre un intervalo finito y cerrado, se puede aproximar una
función continua dada tan cerca como se desee, mediante un polinomio del grado que se desee.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Métodos numéricos
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Manejo de funciones discretas
Sumas (sumatorias)
Sumas y series
Aproximación polinomial mediante interpolación
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Operación de polinomios
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Álgebra no lineal y optimización
Raíces de ecuaciones
Ceros de polinomios
Método de descenso más rápido (gradiente)
Sistemas de ecuaciones lineales
Sistemas de ecuaciones lineales
Programación lineal
Solución de sistemas inconsistentes
www.elsolucionario.org
1
2
10
11
13
14
21
22
5
17
21
22
13
14
21
22
25
25
25
26
27
28
APROXIMACIÓN POLINOMIAL POR MINIMAX
405
DATOS DISCRETOS
La idea básica de la aproximación minimax mediante polinomios puede ilustrarse para el caso de un suminis­
tro de datos discretos xi yi, donde i = 1
N. Sea p(x) un polinomio de grado n o menor y dejemos que las canti­
dades por las cuales no concuerda con nuestros puntos dados sean hi = p(x) - y,. Sea H el más grande de estos
"errores". El polinomio minimax es aquel p(x) particular para el cual H es más pequeño. La aproximación minimax
se denomina también aproximación de Chebyshev. Los principales resultados son como sigue:
1.
La existencia y unicidad del polinomio minimax para cualquier valor de n puede demostrarse mediante el
método de intercambio que se describe abajo. Se brindarán los detalles sólo para el caso n = 1.
2.
La propiedad de error igual es la característica que identifica a un polinomio minimax. Llamado P(x) a
éste, y el error máximo
E = máx|P( X i )-y(x i )|
debemos probar que P(x) es el único polinomio para el cual P(x,) - y(x) toma los valores extremos ±E al
menos n + 2 veces, con signo alternante.
3.
El método de intercambio es un algoritmo para determinar P(x) a través de la propiedad de error igual.
Eligiendo un subconjunto inicial de n + 2 argumentos xi, se encuentra un polinomio de error igual para es­
tos puntos datos. Si el error máximo de este polinomio sobre el subconjunto elegido es también su máxi­
mo total H, entonces él es P(x). Si no, algún punto del subconjunto se intecambia por un punto exterior y
se repite el proceso. Se demostrará la convergencia final a P(x).
DATOS CONTINUOS
En el caso de datos continuos y(x) es casi tradicional empezar recordando un teorema clásico del análisis, co­
nocido como el teorema de Weierstrass, el cual establece que para una función continua y(x) en un intervalo
(a, 6) existirá un polinomio p(x) tal que
en (a, b) para ε positivo y arbitrario. En otras palabras, existe un polinomio que se aproxima a y(x) de manera uni­
forme hasta cualquier precisión requerida. Demostramos este teorema empleando polinomios de Bemstein, los
cuales tienen la forma
donde y(x) es.una función dada y
Nuestra demostración del teorema de Weierstrass implica mostrar que lím Bn(x) = y(x) es uniforme para n, tendien­
do a infinito. La rapidez de convergencia de los polinomios de Bernstein a y(x) es a menudo desilusionante. En la
práctica, se encuentra con mayor frecuencia aproximaciones uniformes precisas mediante métodos de minimax.
www.elsolucionario.org
406
MÉTODOS NUMÉRICOS
Los hechos esenciales de los métodos minimax se asemejan un poco a los correspondientes al caso dis­
creto.
1.
La aproximación minimax a y(x), entre todos los polinomios de grado n o menor, minimiza el máx |p(x) y(x)| en el intervalo dado (a, b).
2.
Existe y es único
,
3. Tiene la propiedad de error igual, siendo el único polinomio de tales características para el cual p(x) - y(x)
toma los valores extremos de tamaño E, con signo alternante, en n + 2 o más argumentos en (a, b). De tal
modo el polinomio minimax puede identificarse mediante su propiedad de error igual. En ejemplos senci­
llos lo anterior puede presentarse exactamente. Un ejemplo es la línea minimax cuando y"(x) > 0. Aquí
P(x) = Mx + B
con
M = y(b)-y(a)
y x2 determinada por
B=
b-a
y(a)+y(x2)
2
y'(x2) =
(a+x2)[y(b)-y(a)]
2(6 - a)
y(b)-y(a)
b-a
Los tres puntos extremos son a, x2 y b. Sin embargo, por lo común el resultado exacto no está dentro del
alcance y debe emplearse un método de intercambio para producir un polinomio que se acerque al com­
portamiento de error igual.
4.
Las series de polinomios de Chebyshev, cuando se truncan, producen con frecuencia aproximaciones que
tienen casi el comportamiento de error igual. En consecuencia, tales aproximaciones son casi minimax. Si
no por completo adecuadas por ellas mismas, pueden utilizarse como entradas al método de intercambio,
con lo que entonces podría esperarse una convergencia más rápida que la que ocurriría con un inicio más
arbitrario.
LA NORMA INFINITA
El tema fundamental de este capítulo es minimizar la norma
donde y representa los datos proporcionados y p el polinomio de aproximación.
Problemas resueltos
DATOS DISCRETOS, LA RECTA MINIMAX
22.1
Muestre que para cualesquiera tres puntos (xi, Yi) con los argumentos xi distintos, hay exactamente una
recta que pierde los tres puntos por cantidades iguales y con signos alternantes. Ésta es la recta de error
igual o recta de Chebyshev.
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MINIMAX
407
Sea y(x) - Mx + B la representación de una recta arbitraria y dejemos que hi = y(xi) - Yi = yi - Yi sean
los "errores" en los tres puntos dato. Un cálculo sencillo muestra que, puesto que yi = Mxi + B, para cual­
quier línea recta, en modo alguno
(x3 - x2)y1 - (x3 - xi)y2 + (x2 - x1)y3 = 0
Definiendo β1 = x3 - x2 β2 = x3 - x1, β3 = x2 - x1, la ecuación anterior se convierte en
β 1 y 1 - β 2 y 2 + β3y3 = 0
Podemos considerar que x1 ≤ x2 ≤ x3 de modo que las tres β sean números positivos. Probaremos que exis­
te una recta para la cual
h1 = h
h2=-h
h3 = h
haciendo los tres errores de igual tamaño y de signo alterno. (Esto es lo que entenderemos como una recta
de "error igual".) Después de esto, si existe una recta con esta propiedad, entonces
y1 = Yl + h
y sustituyendo arriba,
β1(Y1
y2 = Y2-h
y3
= Y3 + h
+ h ) - β2(Y2 - h ) + β3(Y3 + h) = 0
Resolviendo para h
β1Y1-β2Y2 + β3Y3
β1+β2+β3
Esto en realidad prueba que, a lo sumo, puede existir una recta de error igual y que ella debe pasar por los
tres puntos (x1 Y1 + h), (x2, Y2 - h), (x3, V3 + h) para el valor h que acaba de calcularse. Aunque normalmen­
te se requiere una recta que pase por sólo dos puntos designados, es fácil ver que en este caso especial
los tres puntos caen sobre una recta. Las pendientes P1P2 y P2P3 (donde P1 P2, P3 son los tres puntos toma­
dos de izquierda a derecha) son
Y2-Y1-2h
x2-xl
Y 3 -Y 2 + 2h
x3 - x2
y empleando nuestras primeras ecuaciones se demuestra con facilidad que éstos son los mismos. De tal
modo hay exactamente una recta de error igual o de Chebyshev.
22.2 Encuentre la recta de error igual para los puntos dados (0, 0), (1, 0) y (2,1).
Primero encontramos β 1 = 2 - 1 = 1 , β 2 = 2 - 0 = 2 , β 3 = 1 - 0 = 1 , y después calculamos
h=
La recta pasa a través de
puntos aparecen en la figura 22-1.
(l)(0)-(2)(0) + (l)(l)
1+2 + 1
y de tal modo tiene la ecuación y(x)
www.elsolucionario.org
La
recta y los
408
MÉTODOS NUMÉRICOS
Fig. 22-1
22.3
Muestre que la recta de error igual es también la recta minimax para los tres puntos (xi, Y).
Los errores de la recta de error igual son h, -h, h. Sean h1 h2, h3 los errores en cualquier otra recta.
Sea H también el más grande de |h1|, |h2| |h3|. Empleando entonces nuestras fórmulas anteriores,
h=
β1Y1-β2Y2 + β3Y3
β1(y1 - h1) - β2(y2 - h2) + β3(y3 - h3)
β1+β2+β3
β1 + β2 + β3
donde y1 y2 y3 se refieren aquí a "cualquier otra recta". Al reacomodarse esta expresión
h=
(β1y
- β2y2 + β 3 y 3 ) - (β1h1 - β2h2 + β3h3)
βt+β2+β3
y siendo el primer término cero tenemos una relación entre la h de la recta de error igual y h1 h2, h3 de la
otra recta,
h=
β1h1-β2h2 + β3h3
β1+ β2 + β3
Puesto que las β son positivas, el lado derecho de esta ecuación se incrementará con toda seguridad si
remplazamos h1 h2, h3 por H, -H, H, respectivamente. De tal modo |h| H, y el máximo tamaño del error de
la recta de Chebyshev, que es |h|, no resulta mayor que el de cualquier otra recta.
22.4
Muestre que ninguna otra recta puede tener el mismo error máximo que el de la recta de Chebyshev, por lo
que la recta minimax es única.
Supongamos que la igualdad se cumple en nuestro último resultado, \h\ - H. Esto significa que al sus­
titución de H, -H, H que produce este resultado no ha incrementado en realidad el tamaño de β1h1 - β2h2 +
β3h3 Pero esto puede ser cierto sólo si las propias h1, h2, h3 son de igual tamaño H y con signos alternantes,
y éstas son las características que nos conducen a los tres puntos por los cuales pasa la recta de Cheby­
shev. Seguramente éstas no son dos rectas a través de estos tres puntos. Esto prueba que la igualdad |h|= H
identifica la recta de Chebyshev. Hemos probado ahora que la recta de error igual y la recta minimax para
tres puntos son la misma.
22.5
Ilustre el método de intercambio aplicándolo a los siguientes datos:
www.elsolucionario.org
409
APROXIMACIÓN POUNOMIAL POR MINIMAX
0
1
2
6
7
0
0
1
2
3
Probaremos en breve que existe una recta minimax única para N puntos. La prueba utiliza el método
de intercambio, que es también un algoritmo excelente para calcular esta recta, y por ello este método se
ilustrará primero. Incluye cuatro pasos.
Paso 1. Elija tres puntos dato cualquiera. (Un conjunto de tres puntos dato será llamado una tripleta.
Este paso selecciona simplemente una tripleta inicial, la cual se cambiará en el paso 4.)
Paso 2. Encuentre la recta de Chebyshev para esta tripleta. El valor h de esta recta se calculará,
desde luego, en el proceso.
Paso 3. Calcule los errores en todos los puntos dato relativos a la recta de Chebyshev encontrada.
Denomina al más grande de estos valores hi (en valor absoluto) H. Si |h| = H la búsqueda concluye. La rec­
ta de Chebyshev para la tripleta que se considera es la recta minimax para todo el conjunto de N puntos.
(Probaremos esta afirmación después.) Si |h| ≤ H procede el paso 4.
Paso 4. Éste es el paso de intercambio. Elija una nueva tripleta del modo siguiente. Añada a la tri­
pleta vieja un punto dado en el cual ocurra el error más grande de tamaño H. Después descarte uno de los
primeros puntos, en forma tal que los tres restantes tengan errores de signo alterno. (Un poco de práctica
mostrará que esto siempre es posible.) Repita, con la nueva tripleta, los pasos 2 y 3.
Como ejemplo, supongamos que elegimos para la tripleta inicial
(0,0)
(1,0)
(2,1)
compuesta por los primeros tres puntos. Ésta es la tripleta del problema 22.2, para la cual ya hemos encon­
Esto concluye los pasos 1 y 2. Continuando con el
trado que la recta de Chebyshev es
paso 3 encontramos los errores en los cinco puntos dato iguales a
Esto hace
Esta
recta de Chebyshev es una recta de error igual con su propia tripleta, pero falla con cuatro puntos datos por
una cantidad más grande. (Véase la recta interrumpida en la figura 22-2.)
Fig.22-2
www.elsolucionario.org
410
MÉTODOS NUMÉRICOS
Pasando al paso 4, incluimos ahora el cuarto punto y eliminamos el primero para obtener la nueva tri­
pleta
(1,0).
(2,1)
(6,2)
en la cual los errores de la vieja recta de Chebyshev tiene la alternancia requerida de signos
Con
esta tripleta regresamos al paso 2 y encontramos una nueva recta de Chebyshev. El cálculo empieza con
β2 = 6 - l = 5
βt = 6 — 2 = 4
h =
(4)(0)-(5)(l) + (l)(2)
4+5+1
β3 = 2 - 1 = 1
3
10
de manera que la recta debe pasar por los tres puntos,
Se encuentra que esta recta
Repitiendo el paso 3 encontramos los cinco e r r o r e s y puesto que
es
|h|, se ha concluido el procedimiento.
La recta de Chebyshev para la nueva tripleta es la recta minimax para el conjunto completo de pun­
tos. Su error máximo es
La nueva recta se muestra continua en la figura 22-2. Note que el valor |h| de la
es mayor que el de la primera recta
Pero sobre el conjunto completo de términos el error
nueva recta
y es el error minimax. Esto se probará ahora para el caso general.
máximo se ha reducido de
22.6
Pruebe que la condición |h| - H en el paso 3 del método de intercambio será satisfecha a la larga, de
manera que el método se interrumpirá. (Es concebible que podrían efectuarse intercambios por siempre.)
Recuerde que después de cualquier intercambio la recta vieja de Chebyshev tiene errores de tamaño
|h|, |h|, H respecto a la nueva tripleta. Recuerde también que |h| ≤ H (o habríamos detenido el procedimien­
to) y que los tres errores se alternan en el signo. Entonces puede encontrarse la recta de Chebyshev para
esta nueva tripleta. Denominemos h*, -h*, h* los errores en esta nueva tripleta. Regresando a la fórmula
para h en el problema 22.3, desempeñando la vieja recta de Chebyshev el papel de "cualquier otra recta",
tenemos
h* =
β1h1-β2h2+β3h3
βl+β2+β,
donde h1, h2, h3 son los números h, h, H con signos alternantes. En razón de esta alternancia de signos, los
tres términos en el numerador de esta fracción tienen el mismo signo, por lo que
β 1 |h| + β 2 | h | + β 3 H
βl + β 2 + β 3
si suponemos que el error H está en el tercer punto, sólo para ejemplo. (En realidad no es importante en
qué posición se encuentra.) En cualquier caso, |h*| > |h| debido a que H > |h|. La nueva recta de Chebyshev
tiene un error más grande sobre su tripleta que la vieja recta sobre la suya. Este resultado es ahora muy
útil. Si es sorpresivo, considere lo siguiente. La vieja recta dio un excelente servicio
en nuestro ejem­
plo) sobre su propia tripleta, pero poca utilidad
en cualquier otra parte. La nueva recta dio un buen
servicio
sobre su propia tripleta, y lo mismo ocurre también sobre otros puntos.
Podemos probar ahora que el método de intercambio debe detenerse en algún momento. No hay tan­
tas tripletas y ninguna llega a elegirse dos veces, ya que como acabamos de probar, los valores de h au­
mentan establemente. En alguna etapa se satisface la condición
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MINIMAX
22.7
411
Pruebe que la última recta de Chebyshev calculada en el método de intercambio es la recta minimax para el
conjunto completo de N puntos.
Sea h el valor del error igual de la última recta de Chebyshev sobre su propia tripleta. Entonces el ta­
maño del error máximo sobre el conjunto completo de puntos es H = |h|, o habríamos procedido mediante
otro intercambio para aliviar otra tripleta y otra recta. Sean h1 h2
hN los errores para cualquier otra rec­
ta. Entonces |h| ≤ máx |h1|, donde hi se restringe a los puntos de la última tripleta, ya que ninguna recta su­
pera a la recta de Chebyshev sobre su propia tripleta. Pero entonces en realidad |h| ≤ máx |hi| para h, sin
restricción, porque la inclusión del resto de los N puntos sólo puede hacer el lado derecho incluso más
grande. De tal modo H = |h| ≤ máx |hi| y el error máximo de la última línea de Chebyshev es el error máximo
más pequeño de todos. En resumen, la línea minimáx para el conjunto de N puntos es una línea de error
igual sobre una tripleta elegida adecuadamente.
22.8
Aplique el método de intercambio para encontrar la recta minimax para los siguientes datos.
01
0
2
1
3
1
2
4
5
6
7
8
9
10 11
12 13
1
3
2
2
3
5
3
5
4
4
14
5
15
6
16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
6
5
7
6
8
7
7
8
7
9
11 10 12 11
13
El número de tripletas disponibles es C(31, 3) - 4495, de manera que encontrar una correcta serla
comparable a buscar una aguja en un pajar. No obstante, el método de intercambio consume muy poco
tiempo en tripletas sin trascendencia. Empezando con la muy pobre tripleta en x - ( 0 , 1 , 2) sólo se necesi­
tan tres intercambios para producir la línea de minimax y(x) - .38x - .29, que tiene los coeficientes redon­
deados hasta dos lugares. Las tripletas sucesivas con los valores de h y H fueron como sigue:
(0,1,2)
(0,1,24)
(1,24,30)
(9,24,30)
.250
.354
-1.759
-1.857
5.250
3.896
2.448
1.857
Observe que en este ejemplo ningún punto indeseable es incluido en la tripleta. Se necesitan tres puntos y
como se predijo. Los 31 pun­
son suficientes tres intercambios. Note también el incremento estable de
tos, la recta de minimax y la tripleta final (las lineas verticales interrumpidas muestran los errores iguales)
aparecen en la figura 22-3.
www.elsolucionario.org
412
MÉTODOS NUMÉRICOS
Fig. 22-3
DATOS DISCRETOS, EL POLINOMIO DE MINIMAX
22.9
Extienda el método de intercambio para encontrar la parábola de minimáx para los datos siguientes.
-2
-1
0
1
2
2
1
0
1
2
Los datos se obtienen, desde luego, de la función y - |x|, pero esta sencilla función servirá para ilus­
trar cómo las ideas esenciales del método de intercambio se trasladan de los problemas de la recta que
acaban de tratarse para determinar un polinomio de minimax. Las pruebas de la existencia, la unicidad y las
propiedades de error igual de tal polinomio son extensiones de nuestras pruebas para la recta minimax y no
se proporcionarán. El algoritmo empieza ahora con la elección de una "cuádrupla inicial" y tomaremos los
primeros cuatro puntos, en x = - 2 , - 1 , 0 , 1 . Para esta cuádrupla buscaremos una parábola de error igual, di­
gamos
p1(x) = a + bx + cx2
Esto significa que requerimos p(x,) - yi = ±h alternativamente, o
a-2b+4c-2 =
h
a-b +
c-l=-h
a
a+
-0= h
c-1=-h
b+
Resolviendo estas cuatro ecuaciones, encontramos
por lo que
Esto
completa los equivalentes de los pasos 1 y 2, y volvemos al paso 3 y calculamos los errores de nuestra
parábola en los cinco puntos dato. Ellos son
de modo que el máximo error en el conjunto com­
pleto
es igual al máximo en nuestra c u á d r u p l a E l algoritmo finaliza y nuestra primera
parábola es la minimax. Ésta se muestra en la figura 22-4.
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MINIMAX
413
Fig. 22-4
22.10 Encuentre la parábola de minimax para los siete puntos y=|x|,x- -3(1)3.
En este caso se añaden dos puntos más a los extremos de nuestro suministro previo de datos. Su­
pongamos que elegimos la misma cuádrupla que antes. Entonces tenemos otra vez la parábola de error
igual p,(x) del problema precedente. Sus errores en los nuevos puntos dato son por lo que en estas cir­
cunstancias
en tanto q u e E n consecuencia introducimos uno de los nuevos puntos en la cuá­
drupla y abandonamos x = - 2 . En la nueva cuádrupla la vieja parábola tiene los errores,
que se
alternan en el signo. Habiendo hecho el intercambio, una nueva parábola de error igual
p2(x) = a2 + b2x + c2x2
debe encontrarse. Procediendo como en el problema anterior obtenemos rápidamente el error igual
y la parábola
Sus errores en los siete puntos dados
s
o
n
p
o
r lo que H y el algoritmo se detiene. La parábola p2(x) es la parábola de minimax. El hecho de que todos los
errores son de tamaño uniforme es una recompensa, no característica, en general, de los polinomios de mi­
nimax, como mostraron los problemas de recta que acaban de resolverse.
DATOS CONTINUOS, EL TEOREMA DE WEIERSTRASS
22.11 Pruebe que
El teorema del binomio para enteros n y k.
es una identidad en p y q. La diferenciación con respecto a p produce
www.elsolucionario.org
414
MÉTODOS NUMÉRICOS
Multiplicando por p y haciendo después p = x, q = 1 - x, esto se convierte en
mas p y q en el propio teorema del binomio se demuestra que
y por último
22.12 Demuestre que
Una segunda diferenciación relativa a p da como resultado
Multiplicando por p2 y haciendo entonces p = x, q = 1 - x , esto se vuelve
del cual encontramos
Finalmente calculamos
22.13 Demuestre que si d > 0 y 0
x ≤ 1, entonces
donde Σ' es la suma sobre aquellos enteros k para los cuales |(k/n) - x| d. (Éste es un caso especial de la
famosa desigualdad de Chebyshev.)
Descomponiendo la suma del problema precedente en dos partes
donde Σ" incluye aquellos enteros omitidos en Σ'. Pero en ese caso
siendo posible el primero de estos pasos porque Σ" es no negativa y el segundo debido a que en Σ' encon­
tramos |k - nx| nd. Dividiendo entre n2d2, tenemos el resultado requerido.
www.elsolucionario.org
22.14 Obtenga las estimaciones siguientes para Σ' y Σ".
La función x(1 - x) toma su máximo en x - y por ello 0 x(1 - x)
para 0 x 1. El resultado para
Σ' es de este modo una consecuencia inmediata del problema anterior. Pero entonces Σ" - 1 - Σ' 1 (1/4nd2).
22.15 Pruebe que si f(x) es continua para 0
a infinito.
x Σ 1, entonces l í m u n i f o r m e m e n t e cuando n tiende
Esto probará el teorema de Weierstrass, exhibiendo una sucesión de polinomios
que converge uniformemente a f(x). Estos polinomios reciben el nombre de polinomios de Bemstein para
f(x). La prueba se inicia con la elección de un número positivo arbitrario ε. Entonces para |x' - x | ≤ d
y d es independiente de x por la continuidad uniforme de f(x). Denotando entonces con M el máximo de
|f(x)|, tenemos
con kln en la parte de Σ" que desempeña el papel de x'. La definición de Σ" garantiza que |x' - x| ≤ d. En­
tonces
para n suficientemente grande. Éste es el resultado requerido. Otro intervalo aparte de (0,1) puede acomo­
darse mediante un simple cambio de variable.
22.16 Muestre que en el caso de f(x) - x2, Bn(x) - x2 + x(1 - x)/n de modo que los polinomios de Bemstein no son
la mejor aproximación del grado dado para f(x). [Con toda certeza la mejor aproximación cuadrática para
f(x) - x2 es la propia x2.]
www.elsolucionario.org
416
MÉTODOS NUMÉRICOS
Puesto que la suma
se encontró en el problema 22.2,
como se requería. La convergencia uniforme para n que tiende al infinito es aparente, pero claramente B„(x)
no reproduce x2. Consideraremos ahora una mejor clase de polinomios de aproximación uniforme.
DATOS CONTINUOS, LA TEORÍA DE CHEBYSHEV
entonces hay un polinomio P(x) de grado n o menor tal que
22.17 Demuestre que si y(x) es continua en
en el intervalo (a, o) es un mínimo. En otras palabras, ninguno de los otros polinomios de este
tipo produce un máximo más pequeño.
Sea
mediante cualquier polinomio de grado n o menor. Entonces
depende del polinomio p(x) elegido, esto es, depende del conjunto de coeficientes (a0, a1, . . . , an) que lla­
maremos como se indica. Puesto que
es una función continua de a y no negativa, tiene una cota in­
ferior más grande. Llamemos L a esta cota. Lo que tiene que probarse es que para algún conjunto particular
de coeficientes A, los coeficientes de P(x), se alcanza realmente la cota inferior, esto es,
En con­
traste, la función f(f) = 1/t para t positiva tiene la cota inferior cero más grande, pero no hay valor t para el
cual f(t) alcance en realidad esta cota. El intervalo infinito de t es, desde luego, el factor que permite que
ocurra esta situación. En nuestro problema el conjunto de coeficientes tiene también un intervalo ilimitado,
pero a pesar de eso mostraremos ahora que M(A) = L. Para empezar, sea ai = Cb1 para i = 0, 1
n
de
manera tal que Σb21 = 1. También podemos escribir
Consideremos una segunda función
donde máx se refiere como es usual al máximo del polinomio en el intervalo (a, b). Ésta es una función con­
tinua sobre la esfera unitaria Σp12 = 1. En tal conjunto (cerrado y acotado) una función continua asume su
Pero el valor cero es imposible puesto que
valor mínimo. Llamemos μ a este mínimo. Sencillamente
p(x) - 0 puede producir este mínimo y la condición sobre bi excluye temporalmente este polinomio. De tal
modo μ > 0. Pero entonces
Retornando ahora a
y empleando el hecho de que el valor absoluto de una diferen­
cia excede la diferencia de los valores absolutos, encontramos
Si elegimos C > (L + 1 + máx |y(x)|)/μ = R, entonces de inmediato
Recordando que L es la co­
ta inferior más grande que
vemos que
es relativamente grande p a r a y que su cota inferior
más grande bajo la restricción
será este mismo número L. Pero esta restricción es equivalente a
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MINIMAX
417
por lo que en estas condiciones es otra vez un asunto de una función continua
en un conjunto ce­
rrado y acotado (una esfera sólida, o una bola). En un conjunto de tales características se supone en reali­
dad la cota inferior más grande, digamos en
De tal modo M(A) es L y P(x) es un polinomio minimáx.
22.18 Dejemos que P(x) sea una aproximación polinomial de minimáx a y(x) en el intervalo (a, o), entre todos los
polinomios de grado n o menor. Sea
y supongamos que el propio y(x) no es un
polinomio de grado n o menor, por lo que
Muestre que debe existir al menos un argumento para el
cual y(x) - P(x) - E, y similarmente para -E. Seguimos suponiendo que y(x) es continua.
Puesto que y(x) - P(x) es continua en a ≤ x ≤ 6, debe alcanzar ±E en algún lugar. Probaremos que
debe alcanzar ambos. Supongamos que no es igual a E en ninguna parte dentro de (a, b). Entonces
donde d es positiva, y por ello
Pero esto puede escribirse como
la cual categóricamente requiere que
con un error máximo de
Esto contradi­
ce la suposición original de que el propio P(x) es un polinomio de minimáx, con un error máximo de E. De
tal modo y(x) - P(x) debe ser igual a E en alguna parte de (a, 6). Una prueba muy similar muestra que debe
ser igual a -E. La figura 22-5 ilustra la idea simple de esta prueba. El error y(x) - P(x) para el polinomio de
minimáx no puede comportarse como muestra la línea continua, porque al elevar la curva por la cantidad
se produce una nueva curva error (que se muestra mediante la línea interrumpida) con un valor absoluto
máximo más pequeño de
y esto es una contradicción.
-E
Fig.22-5
22.19 Continuando el problema previo, muestre que, para n = 1, la aproximación por polinomios lineales, debe
haber un tercer punto en el que el error y(x) - P(x) de un P(x) minimax asume su valor máximo E.
Dejemos y(x) - P(x) = E(x) y dividamos (a, 6) en subintervalos suficientemente pequeños de modo
que para x1, x2 dentro de cualquier subintervalo,
www.elsolucionario.org
MÉTODOS NUMÉRICOS
418
Puesto que E(x) es continua en
esta expresión se cumple con seguridad. En un subintervalo, de­
nominado /1, sabemos que el error alcanza el valor E, digamos en x - x+. Resulta que en todo este subinter­
valo,
haciendo
De modo similar, en un subintervalo, llamado /2, encontramos E(x.) - -E, y, por tanto,
En consecuencia, estos dos subintervalos no pueden ser adyacentes y por ello podemos elegir
un punto
entre ellos. Suponga que /, se encuentra a la izquierda de l2. (El argumento es casi idéntico en
tiene el mismo signo que E(x) en cada uno de los dos subintervalos
la situación inversa.) Entonces
analizados. Sea R = máx |u1 - x | en (a, b).
Supongamos ahora que no hay un tercer punto en el que el error sea ±E. Entonces en casi los dos
subintervalos que acaban de considerarse debemos tener
y puesto que hay un número finito de muchos subintervalos.
Naturalmente
puesto que estos subintervalos se extienden hasta los puntos extremos de I1 e /2, don­
de
Considere la siguiente alteración de P(x), aún un polinomio lineal:
Si elegimos ε lo suficiente pequeño de manera que
aproximación que P(x). No obstante,
entonces P*(x) se vuelve una mejor
por lo que en /, el error se reduce pero sigue siendo positivo, en tanto que l2 aumenta pero permanece ne­
gativo; en ambos subintervalos el tamaño del error se ha reducido. En otra parte, a pesar de que el tamaño
y a s í t i e n e un error máximo más pequeño
de los errores puede crecer, no puede exceder
que P(x). Esta contradicción muestra que debe existir un tercer punto con error ±E. La figura 22-6 ilustra la
Fig. 22-6
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MINIMAX
419
sencilla idea detrás de esta prueba. La curva del error E(x) no puede comportarse como la curva continua
(sólo dos puntos ±E) porque la adición del término de la corrección lineal ε (u1 - x) a P(x) disminuye, enton­
ces, el error en esta misma cantidad, conduciendo a una nueva curva de error (que se muestra interrumpi­
da) con el valor absoluto máximo más pequeño.
22.20 Muestre que para el P(x) del problema anterior debe haber tres puntos en los cuales ocurren errores de
tamaño E y con signo alterno.
La prueba del problema anterior es en realidad suficiente. Si por ejemplo, los signos fueron +, +, -, eli­
giendo entonces u1, entre + y - adyacentes nuestro P*(x) es otra vez mejor que P(x). Lo mismo ocurre en el
caso del patrón +, -, -. Sólo la alteración de los signos puede evitar la contradicción.
22.21 Muestre que en el caso general del polinomio minimax de grado n o menor, deben existir n + 2 puntos de
tamaño de error máximo con signo alterno.
La prueba se ilustra tratando el caso n = 2. Dejemos que P(x) sea un polinomio minimax de grado dos
o menor. Por el problema 22.18 éste debe tener al menos dos puntos de error máximo. El argumento de los
problemas 22.19 y 22.20, con P(x) ahora cuadrático en vez de lineal pero con ningún otro cambio, muestra
entonces que debe existir un tercer punto de tales características y los signos deben alternarse, digamos +,
-, +. Supongamos ahora que no ocurre la cuarta posición de error máximo. Repetimos el argumento del
problema 22.19, eligiendo dos puntos u1 y u2 entre los subintervalos /1, /2 e l3, en los cuales ocurren los erro­
res ±E, y utilizando el término de corrección ε(u1 -x)(u 2 - x ) , que concuerda en signo con E(x) en estos sub­
intervalos. Ningún otro cambio es necesario. El polinomio cuadrático P *(x) tendrá un error máximo más pe­
queño que P(x), y esta contradicción prueba que el cuarto punto ±E debe existir. La alternancia del signo se
establece por medio del mismo argumento utilizado en el problema 22.20, y la extensión a valores más al­
tos de n es enteramente similar.
22.22 Demuestre que hay sólo un polinomio minimax para cada n.
Supongamos que hay dos, P1(x) y P2(x). Entonces
Sea
Entonces
y P3 es también un polinomio minimax. Por el problema 22.21 debe haber una sucesión de n + 2 puntos en
los que y(x) - P3(x) es alternativamente ±E. Sea P3 (x+) - E. Entonces en x+ tenemos y-P3 = E,0
( y - P 1 ) + ( y - P 2 ) = 2E
Puesto que ningún término de la izquierda puede exceder a E, cada uno debe ser igual a E. De tal modo
P1(x+) - P2(x-). Similarmente P1(x_) - P2(x-). Los polinomios P1 y P2 coinciden, por tanto, en los n + 2 puntos y
por ello son idénticos. Esto prueba la unicidad del polinomio minimax para cada n.
22.23 Demuestre que un polinomio p(x) de grado n o menor, para el cual el error y(x) - p(x) toma valores ex­
tremos alternos de ±e en un conjunto de n + 2 puntos, debe ser el polinomio minimax.
Esto mostrará que sólo el polinomio minimax puede tener este rasgo de error igual, y es útil en la bus-
www.elsolucionario.org
420
MÉTODOS NUMÉRICOS
queda e identificación de tales polinomios. Tenemos
siendo P(x) el único polinomio minimax. Supongamos e > E. Entonces puesto que
P-p = (y-p) + (P-y)
vemos que, en los n + 2 puntos extremos y-p, las cantidades P-p y y-p tienen el mismo signo. (El pri­
mer término a la derecha es igual a e en estos puntos y así domina al segundo.) Pero el signo de y - p se
alterna en este conjunto, de manera que ocurre lo mismo con el signo de P-p. Esto corresponde a n + 1
alternaciones en total y equivale a n+ 1 cero para P-p. Puesto que P -p es de grado n o menor debe ser
idénticamente cero, haciendo p = P y E = e. Esto contradice nuestra suposición de que e > E y nos deja con
una única alternativa, esto es, e = E. El polinomio p(x) es, en consecuencia, el (único) polinomio minimax
P(x).
D A T O S CONTINUOS, EJEMPLOS DE POLINOMIOS M I N I M A X
22.24 Muestre que sobre el intervalo (-1,1) el polinomio minimax de grado n o menor para y(x) - xn+1 puede en­
contrarse expresando x n+1 como una suma de polinomios de Chebyshev y anulando el término Tn+1(x).
Sea
xn+l = a0T0(x) + • • • + anTn(x) + an+1Tn+1(x) =p(x) + an+1Tn+1(x)
Entonces el error es
y vemos que este error tiene extremos alternos de ±an+1 en los n + 2 puntos donde Tn+1, - ±1. Estos puntos
son xk = cos [kπl(n + 1)], con k = 0,1
n + 1. Comparando los coeficientes de xn+1 en ambos lados de la
expresión anterior, encontramos también que an+1 - 2-n. El coeficiente del término de mayor grado de Tn+1(x)
es 2n. Véanse los problemas 21.42 y 21.43. El resultado del problema 22.23 se aplica ahora y muestra que
p(x) es el polinomio minimax, con E = 2-n. Como ejemplos las sumas en el problema 21.45 pueden truncar­
se para obtener
Error
Error
Error
Error
y así sucesivamente. Observe que en cada caso el polinomio minimax (de grado n o menor) es en realidad
de gradp n - 1.
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MINIMAX
22.25 Muestre que en cualquier serie de polinomios de Chebyshev
421
cada suma parcial Sn es el polinomio
minimax de grado n o menor para la siguiente suma Sn+1 Otra vez se toma el intervalo (-1,1).
Del mismo modo que en el problema anterior, pero con y(x) - Sn+1(x) y p(x) - Sn(x), tenemos
E(x) = S n+1 (x) - S n (x) = a n + 1 T n + 1 (x)
El resultado del problema 22.23 se aplica otra vez. Sin embargo, note también que Sn-1(x) puede no ser el
polinomio minimax de grado n - 1 o menor, puesto que anTn + an+1Tn+1 no es necesariamente una función de
igual rizo. (Sin embargo, este fue el caso en el problema anterior puesto que an fue cero.)
22.26 Emplee el resultado del problema 22.24 para economizar el polinomio
cúbico, para el intervalo (-1,1).
en un polinomio
Esto en realidad se logró en el problema 21.50, pero ahora consideramos el resultado de una manera
diferente. Puesto que
1
6
1
120
169
192
5
128
1
1920
el truncamiento del término T5 nos lleva al polinomio minimax de cuarto o menor grado para y(x), esto es,
169
192
5
128
Éste sigue siendo sólo aproximadamente el polinomio minimax del mismo grado para sen x. Un truncamien­
to adicional, del término T3, no produciría un polinomio minimax para y(x), no exactamente en todo caso.
22.27 Encuentre el polinomio minimax de grado uno o menor, en el intervalo (a, b), para una función y(x) con
y"(x) > 0.
Sea el polinomio P(x) = Mx + B. Debemos encontrar tres puntos x, ≤ x2 ≤ x3 en (a, b) para los cuales
E(x) = y(x) - P(x) alcance sus valores extremos con signos alternos. Esto pone a x2 en el interior de (a, b) y
requiere que E'(x2) sea cero, o y'(x2) = M. Puesto que y" > 0, y' es estrictamente creciente y puede igualar a
M sólo una vez, lo que significa que x2 puede ser el único punto extremo interior. De tal modo x, - a y x3 = b.
Por último, por la propiedad de rizo igual,
Resolviendo, tenemos
con
determinada por
22.28 Aplique el problema previo a
en el intervalo
www.elsolucionario.org
422
MÉTODOS NUMÉRICOS
Encontramos primero M = -2/π; y después de y'(x2) = M, x2 - arc cos (2/π). Realmente,
y de P(x) -Mx + B encontramos
siendo la aproximación la línea minimax.
22.29
es la aproximación cúbica (o menor) minimax a y(x) - |x| sobre el intervalo (-1,1).
El error es
errores alternantes de tamaño máximo
P(x) es el polinomio minimax de grado n - 3 o menor.
puntos garantizan (por el problema 22.23) que
22.30 Utilice la función y(x) = ex sobre el intervalo (-1,1) para ilustrar el método de intercambio en la búsqueda de
una recta minimax.
El método del problema 22.27 produciría la recta minimax, pero para una primera ilustración simple,
ignoramos momentáneamente ese método y procedemos por intercambio, imitando el procedimiento del
problema 22.5. Puesto que estamos después de una recta, necesitamos n + 2 = 3 puntos de error máximo
± E. Intentamos con x = - 1 , 0,1 como una tripleta inicial. Los valores correspondientes de y(x) son aproxi­
madamente .368,1 y 2.718. Se encuentra con facilidad que la recta de error igual para esta tripleta es
p1(x) = 1.175x+ 1.272
con errores h = ± .272 en la tripleta. Fuera de la tripleta, un cálculo del error en intervalos de .1 revela un
error máximo de tamaño J = .286 (y negativo) en x = .2. En consecuencia, formamos una nueva tripleta, in­
tercambiando el viejo valor x = 0 por el nuevo x = .2. Esto retiene la alternancia de los signos del error re­
queridos por el paso 4 del método de intercambio presentado antes, y que ahora estamos imitando. En la
nueva tripleta y(x) toma los valores .368, 1.221 y 2.718 aproximadamente. Se encuentra que la recta de
error igual es
p2(x) = 1.175x + 1.264
con errores h = ± .278 en la tripleta Fuera de la tripleta, anticipando errores máximos cercanos a x = .2, veri­
ficamos esta proximidad en intervalos de .01 y encontramos un error de .279 en x = .16. Puesto que esta­
mos llevando sólo tres lugares, esto es lo mejor que podemos esperar. Un cambio a la tripleta x = - 1 , .16,1
reproduciría realmente p2(x).
Vamos a ver ahora lo que maneja el método del problema 22.27. Con a = - 1 , y b = 1 produce de in­
mediato M = (2.718 - .368)/2. Luego la ecuación y (x2) = ex conduce a x2 = .16, después de lo cual el resul­
tado B = 1.264 es directo. La recta se muestra en la figura 22-7, con la escala vertical condensada.
22.31 Emplee el método de intercambio para encontrar el polinomio cuadrático minimax para y(x) = ex sobre ( - 1 ,
1).
Recordando que el truncamiento de una serie de polinomios de Chebyshev conduce a menudo a
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MINIMAX
423
Fig.22-7
errores de rizo casi iguales asemejándose al primer término omitido, tomamos como nuestra cuádrupla ini­
cial los cuatro puntos extremos de T3(x), los cuales son
La parábola que pierde los cuatro puntos
alternadamente por ±h resulta tener su error máximo en x = .56. La nueva cuádrupla (-1, -.5, .56,1) condu­
ce entonces a una segunda parábola con error máximo en x = -.44. La cuádrupla siguiente es (-1, -.44,
.56,1) y resulta ser la última. Su parábola de rizo igual es, hasta cinco lugares decimales,
p(x) = .55404x2 + 1.13018x + .98904
y su error máximo tanto en el interior como en el exterior de la cuádrupla es H - .04502.
Problemas suplementarios
DATOS DISCRETOS
22.32 Muestre que la recta de mínimos cuadrados para los tres puntos dato del problema 22.2 es
Muestre que sus errores en los argumentos de los datos son
Se encontró que la recta de
con errores de
Verifique que la recta de Chebyshev tiene el error
Chebyshev es
máximo más pequeño y la recta de mínimos cuadrados, la suma más pequeña de errores al cuadrado.
22.33 Aplique el método de intercambio a los marcadores de golf promedio del problema 21.2, produciendo la
recta minimáx. Utilice esta recta para calcular los marcadores promedio ajustados. ¿Cómo se comparan los
resultados con los obtenidos por medio de mínimos cuadrados?
22.34 Aplique el método de intercambio a los datos del problema 21.5, obteniendo la recta minimax y después la
función exponencial P(x) - AeMx correspondiente.
www.elsolucionario.org
424
MÉTODOS NUMÉRICOS
22.35Obtenga una f ó r m u l a p a r a la recta de Chebyshev de una tripleta arbitraría
Dicha fórmula podría ser útil en la programación del método de intercambio para el cálculo por computadora.
22.36 Muestre que si los argumentos x¡ no son distintos, entonces la recta minimax no puede determinarse en
forma única. Por ejemplo, considere los tres puntos (0, 0), (0, 1) y (1, 0) y muestre que todas las rectas
entre
(Véase la figura 22-8.)
Fig. 22-8
22.37 Encuentre la parábola de error igual para los cuatro puntos
de la curva y - sen x.
22.38 Encuentre la parábola minimax para los cinco puntos
22.39 Emplee el método de intercambio para obtener la parábola minimax para los siete puntos y = cos x, x =
0(π/12)π/2. ¿Cuál es el error máximo |h| de esta parábola? Compare su precisión con la de la parábola de
Taylor
22.40 Extienda el método de intercambio para obtener el polinomio cúbico para los siete puntos y = sen x, x =
0(π/12)π/2. ¿Cuál es el error máximo |h| de este polinomio cúbico? Compare su precisión con el polinomio
cúbico de Taylor
22.41 Encuentre el polinomio cúbico minimax para la siguiente función. ¿Cuál es el error minimax y dónde se al­
canza?
-2
-1.5
-1
-.5
0
.5
1
1.5
2
5
5
4
2
1
3
7
10
12
22.42 Encuentre el polinomio cuadrático minimax para
y(x)
1 +(4.1163X)2
x=0(.01)1
así como el error minimax y los argumentos en los que se alcanza.
www.elsolucionario.org
APROXIMACIÓN POLINOMIAL POR MINIMAX
425
22.43 ¿Cuál es el resultado de buscar una aproximación cúbica a la función del problema precedente? ¿Cómo
puede predecirse ésta a partir de los resultados de ese problema?
DATOS CONTINUOS
22.44 Encuentre el polinomio minimax de quinto o menor grado para y(x) = x6 en el intervalo ( - 1 , 1). ¿Cuál es el
error?
22.45 ¿Cuál es el polinomio minimax de segundo o menor grado para y(x) = T0 + T1 + T2 + T3 y cuál es el error?
Muestre que T0 + T1 no es, sin embargo, la recta minimax para y(x), mostrando que el error de esta
aproximación no es de rizo igual.
22.46 Encuentre el polinomio minimax de quinto o menor grado para
[El intervalo es (-1,1).]
y ¿cuál es su error?
22.47 Aplique el problema 22.27 para encontrar la recta minimax sobre (0, π/2) para y(x) = -cos x.
22.48 ¿Funciona el método del problema 22.27 para y(x) = |x| sobre ( - 1 , 1) o la discontinuidad en y'(x) hace al
método inaplicable?
22.49 Emplee el método de intercambio para encontrar la recta minimax para y(x) = cos x sobre (0, π/2). Trabaje
hasta tres decimales y compare con lo encontrado mediante otro método en el problema 22.44.
22.50 Utilice el método de intercambio para encontrar la parábola minimax para y(x) = cos x sobre (0, π/2). [Es
posible que usted desee utilizar los puntos extremos de T3(x), convertidos mediante un cambio de variable
en el intervalo (0, π/2), como una cuádrupla inicial.]
22.51 Encuentre un polinomio de grado mínimo que aproxime y(x) = cos x sobre (0, π/2) con error máximo igual a
.005. Naturalmente, el error de redondeo limitará la precisión a la cual puede determinarse el polinomio.
22.52 Pruebe que la aproximación del polinomio minimax a f(x) = 0, entre todos los polinomios de grado n con el
coeficiente del termino de mayor grado igual a 1, es 21-nTn(x). Se considera que el intervalo de aproximación
es ( - 1 , 1). Lo anterior se cubre en los problemas del 22.17 al 22.23, pero lleve a cabo los detalles del
siguiente argumento histórico. Sea
p ( x ) = x n +a 1 x n-1 + • • • +a n
cualquier polinomio del tipo descrito, puesto que Tn(x) = cos (n arccos x), tenemos
máx|21-nTn(x)| = 21-n
Observe que este polinomio toma sus valores extremos de ± 21n alternativamente en los argumentos xk =
cos kπ/n, donde k = 0,1
n. Suponga que un polinomio p(x) fue tal que
máx|p(.x)|≤21-n
y dejando
P(x)=p(x)-2 1 - n T n (x)
www.elsolucionario.org
426
MÉTODOS NUMÉRICOS
Entonces P(x) es de grado n = 1 o menor y no es idénticamente cero puesto que ello requeriría que máx
|p(x)| = 21n. Considere los valores P(xk), En vista de que p(x) es dominado por 21-nTn(x) en estos puntos, ve­
mos que P(xk) tiene signos alternantes. Siendo continua, P(x) debe, en consecuencia, tener n ceros entre xk
consecutivas. Pero esto es imposible para un polinomio de grado n = 1 o menor, el cual no se hace idénti­
camente igual a cero. Esto demuestra que |p(x)| > 21-n.
22.53 En la tabla siguiente se brindan valores de y(x) = e(t+2)4. Encuentre la parábola minimax para estos datos.
¿Cuál es el error minimax?
-2
-1
0
1
2
1.0000
1.2840
1.6487
2.1170
2.7183
22.54 ¿Cuál es el mínimo grado de una aproximación polinomial a ex en el intervalo (-1,1) con error máximo .005
o menor?
22.55 La serie de Taylor para In (1 + x) converge tan lentamente que se necesitarían cientos de términos para una
precisión de cinco lugares sobre el intervalo (0,1). ¿Cuál es el error máximo de
p(x) = .999902x - .497875x 2 + .317650x 3 - . 193761x 4 + .085569x 5 - .018339x 6
en este mismo intervalo?}
22.56 Aproxime y(x) =1 -x + x 2 - x 3 + x 4 - x 5 + x 6 mediante un polinomio de grado mínimo, con un error que no
exceda .005 en (0,1).
22.57 Continúe el problema anterior para producir una aproximación de grado mínimo con error a lo más de . 1 .
www.elsolucionario.org
Aproximación por
funciones racionales
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el significado de funciones racionales (Introducción).
2. Explicar con sus propias palabras el concepto de aproximación polinomial mediante funciones
racionales (Introducción).
3. Explicar con sus propias palabras cuando menos cinco ventajas y cinco desventajas de aproximación
polinomial mediante funciones racionales (Introducción).
4.
Encontrar funciones racionales de colocación dados ciertos datos de la función (Introducción,
Problemas 23.1 a 23.3, 23.18, 23.19).
5. Explicar con sus propias palabras el concepto de fracciones continuadas (Introducción).
6. Explicar con sus propias palabras el concepto de diferencias recíprocas (Introducción).
7.
Evaluar fracciones continuas en diversos puntos, para conocer la mecánica del método (Introducción,
Problemas 23.4,23.20, 23.21).
8. Aplicar el método de fracciones continuas para encontrar una función racional de aproximación,
dados ciertos datos en X y V (Introducción, Problemas 23.20 a 23.24.23.28 a 23.30).
9. Desarrollar la relación que existe entre las funciones racionales y las fracciones continuas (será
necesario conocer las operaciones elementales por renglón en una matriz y el concepto de
determinante, cuya teoría se presenta en el Capítulo 26) (Problemas 23.5,23.9,23.10,23.18, 23.19).
10. Demostrar que las diferencias recíprocas son simétricas (Problema 23.6)
11. Recuperar una función a partir de datos tabulados aplicando diferencias recíprocas (Problema 23.7)
12. Aplicar el algoritmo del método de intercambio para encontrar una aproximación minimax de una
función racional en cierto intervalo (Problema 23.26).
13. Aplicar el algoritmo del método de intercambio para encontrar una aproximación minimax de una
función racional dado un conjunto de puntos (Problema 23.13,23.14,23.27).
14. Aplicar la aproximación por funciones racionales, para interpolar valores dado un conjunto de puntos
tabulados (Problemas 23.8, 23.31).
15. Encontrar una función racional, dados tres puntos equiespaciados (Problemas 23.11,23.12).
16. Derivar las condiciones que deberán tener los coeficientes de los polinomios que forman la función
racional de Padé, para que sean iguales la función original y la aproximación evaluadas en cero, en
todas sus derivadas (Problemas 23.15 a 23.17, 23.33,23.34).
17. Aplicar la función racional de Padé, para aproximar funciones, cambiando el grado de los
polinomios utilizados y comparando los diversos resultados (Problemas 23.15 a 23.17, 23.33, 23.34).
www.elsolucionario.org
428
MÉTODOS NUMÉRICOS
APLICACIONES DE LA APROXIMACIÓN POLINOMIAL POR FUNCIONES RACIONALES
Este capítulo trata nuevamente acerca de la aproximación de funciones; sin embargo los métodos que involucran el uso de funciones racionales son un poco más sofisticados que los vistos en capítulos previos, y por lo
mismo a menudo se consideran como casos especiales de los métodos numéricos.
Como hemos visto en los cursos de cálculo y como se verá en la introducción de este capítulo, una función
racional es la razón de dos polinomios; en términos generales, se especifican los grados de los polinomios, tanto del numerador como del denominador y a través de la aproximación de Padé se determinan todos los coeficientes arbitrarios que intervienen.
La aproximación de Padé es una extensión a funciones racionales de la aproximación mediante el polinomio de Taylor vista en el Capítulo 11. Cuando el grado del polinomio del numerador es n y el del denominador
es cero, estamos hablando del polinomio de Taylor de grado n, desarrollado alrededor de cero, que a su vez es
el polinomio de Maclaurin de grado n, también visto en el Capítulo 11.
Las funciones discontinuas a menudo se aproximan mediante funciones racionales, así como también
aquellas que tienden a cero o a infinito.
Una gran desventaja del uso de polinomios en las aproximaciones, es su tendencia a oscilar, la cual
causa con frecuencia que el error se haga muy significativo. Las funciones racionales nos proporcionan técnicas que disminuyen el error de aproximación, ya que esparcen más uniformemente dicho error en el intervalo en el que se esté trabajando.
Cualquier polinomio puede considerarse como una función racional, tomando el denominador igual a
uno, por lo que podemos inferir que la aproximación por funciones racionales no nos podrá dar cotas de error mayores que las que obtendríamos mediante aproximación polinomial.
Cuando en una función racional el numerador y el denominador tienen grados iguales o muy parecidos, producen en general resultados de aproximación superiores a los de los métodos de aproximación por polinomios,
con el mismo esfuerzo computacional en casi todos los sistemas de cómputo, ya que se asume que se requiere un
esfuerzo similar para multiplicar que para dividir.
Una ventaja adicional de las funciones racionales es que permiten la aproximación eficiente de funciones
que tengan discontinuidades infinitas fuera del intervalo de aproximación, pero cerca de él.
El empleo de funciones racionales es menos frecuente que otros tipos de aproximación polinomial, así
como el empleo de funciones de Fourier; éstas se tratarán en el Capítulo 24.
Los polinomios algebraico i son por mucho la forma más importante y popular de aproximar funciones,
en gran parte debido a que su ter ría ha sido muy bien desarrollada y se plasma de una manera simple. Los polinomios son muy sencillos de evaluar y el resultado de sus sumas, restas, productos y divisiones son a su vez polinomios; asimismo los polinomios se pueden derivar e integrar con poca dificultad, dando como resultado de estas
operaciones otros polinomios.
Adicionalmente si el origen del sistema de coordenadas se traslada o bien si se cambia la escala de la variable independiente, el polinomio transformado sigue siendo un polinomio.
Algunas de estas propiedades tan favorables, las tienen también las series de Fourier y como podremos
ver en este capítulo, la mayoría de las funciones que se pueden considerar como candidatas potenciales para ser
aproximadas (seno, coseno, exponenciales, logarítmicas, etc.), casi siempre sus aproximaciones se dan en términos de polinomios o de razones de polinomios.
Todas estas ventajas obvias de los polinomios tendrían muy poco valor si no existiera la justificación analítica para demostrar que los polinomios pueden tener una buena aproximación de una función dada f(X); y el término
"buena aproximación" significa que la discrepancia entre la función original y la aproximación, también llamado
error en la aproximación puede hacerse arbitrariamente pequeño.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES RACIONALES
429
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Métodos numéricos
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación por funciones racionales
Aproximación polinomial por funciones trigonométricas
Manejo de funciones discretas
Sumas (sumatorias)
Sumas y seríes
Aproximación polinomial mediante interpolación
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación por funciones racionales
Aproximación polinomial por funciones trigonométricas
Operación de polinomios
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación por funciones racionales
Aproximación polinomial por funciones trigonométricas
Álgebra no lineal y optimización
Raíces de ecuaciones
Ceros de polinomios
www.elsolucionario.org
1
2
10
11
13
14
21
22
23
24
5
17
21
22
23
24
13
14
21
22
23
24
25
25
430
MÉTODOS NUMÉRICOS
INTRODUCCIÓN
Recordaremos un poco acerca del tema de funciones que normalmente se tratan en los cursos de cálculo.
Función general de primer grado: Aquella dada por la ecuación F(X) ) y = aX + b; donde a y b son cons­
tantes y a ǂ 0.
Función general de segundo grado: Aquella dada por la ecuación F(X) )y y aX2 + bX + c; donde a, b y c
son constantes y a ǂ 0.
n-2
a2X
Función polinomial: Aquélla dada por un polinomio en X, de grado n; Pn(X) = F(X) = y = y = a0Xn + a1Xn-1 +
+ a3Xn-3 + • • •+ an-1X + a.
Función racional: Si U y V son funciones polinomiales, la función F está dada por el cociente de U sobre V.
F(X) - U(X)IV(X).
Función algebraica simple: Aquella función para la cual se puede obtener una fórmula para F(X), expresa­
da mediante un número finito de operaciones de suma, resta, multiplicación, división y extracción de raíces para X
y constantes.
Las funciones algebraicas simples, incluyen a las funciones racionales como casos especiales.
Toda función polinomial es una función racional y toda función racional es una función algebraica.
Funciones trascendentes: Aquellas funciones que no son algebraicas, tales como las funciones trigonomé­
tricas (seno, coseno, etc.), exponenciales y logarítmicas.
COLOCACIÓN
Las funciones racionales son cocientes de polinomios y por ello constituyen una clase de funciones mucho
más ricas que los polinomios. Este mayor suministro aumenta las perspectivas para una aproximación precisa. Es
difícil esperar, por ejemplo, que las funciones con polos respondan bien a los esfuerzos de una aproximación poli­
nomial, ya que los polinomios no tienen singularidades. Tales funciones son el principal objetivo de la aproxima­
ción racional. Pero incluso con funciones no singulares hay ocasiones en las que pueden preferirse las
aproximaciones racionales.
Se analizarán dos tipos de aproximaciones, asemejándose los procedimientos a los utilizados para la aproxi­
mación polinomial. La colocación en argumentos prescritos es una base para seleccionar una aproximación racio­
nal, como lo es para los polinomios. Las fracciones continuas y las diferencias recíprocas son las principales
herramientas utilizadas. Las fracciones continuadas comprendidas toman la forma
que puede continuarse aún más si se requiere. No es difícil ver que esta fracción particular podría reacomodarse
como el cociente de dos polinomios cuadráticos, en otras palabras, una función racional. Los coeficientes p se denominan diferencias recíprocas y se elegirán de tal manera que se alcance la colocación. En el presente ejemplo
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES RACIONALES
431
encontraremos que
Pl
x2 - x1
y1-y1
P2-y1
x3-x2
x3-x1
x2-x1
y2-y1
y3-y1
con expresiones similares para p3 y p4. El término diferencia recíproca no es antinatural.
MINIMAX
Las aproximaciones racionales minimáx están ganando también un importante papel en las aplicaciones. Su
teoría, que incluye la propiedad de error igual y un algoritmo de intercambio, es similar a la del caso polinomial.
Por ejemplo puede encontrarse una función racional
R(x) =
1
a + bx
a la que le falten tres puntos dato especificados (xi, y) alternadamente por ±h. Esta R(x) será la función racional
minimax para los puntos dados, en el sentido de que
máx |R(x i ) — yi | = h
será más pequeño que los correspondientes máximos cuando R(x) es sustituida por otras funciones racionales de
la misma forma. Si se especifican más de tres puntos, entonces un algoritmo de intercambio identifica la R(x) mini­
max. La analogía con el problema de los polinomios minimáx es manifiesta.
APROXIMACIONES DE PADÉ
Éstas toman la forma
R m n (x) =
P m (x)
Qn(x)
con Pm y Qm polinomios de grado m y n, respectivamente. La normalización Qn(0) = 1 es común. Para aproximar
una función determinada y(x), Padé sugiere hacer que y y Rmn, concuerden en valor en algún punto especificado,
junto con sus primeras N derivadas, donde N = m + n. Esto proporciona N + 1 condiciones para determinar los res­
tantes N + 1 coeficientes de Pm y Qn. El punto en cuestión suele tomarse como x = 0, mediante una apropiada
translación de variable si es necesario. El paralelismo con el polinomio de Taylor de y(x) en x = 0 es evidente y en
efecto el polinomio de Taylor es Rn0 Cuando se produce, se alcanza mayor precisión para una N dada, eligiendo
m = π + 1 o m = n, esto es, mediante polinomios del numerador y del denominador más o menos de igual grado.
Problemas resueltos
LA FUNCIÓN RACIONAL DE COLOCACIÓN
23.1 Encuentre la función racional y(x) = 1/(a + bx) dado que y(1) = 1 y y(3) =
www.elsolucionario.org
432
MÉTODOS NUMÉRICOS
La sustitución requiere que a + b = 1 y a + 3b = 2, que obliga a que
La función requerida es
y(x) = 2/(1 + x). Este problema simple ilustra el hecho de que la búsqueda de una función racional por colo­
cación equivale a resolver un conjunto de ecuaciones lineales con respecto a los coeficientes desconoci­
dos.
23.2
Encuentre también funciones racionales y2(x) = Mx + B y y3(x) = c + d/x que tengan
La función lineal y2(x) = (5 - x)/4 puede encontrarse por inspección. Para la otra necesitamos satisfa­
cer la ecuación de coeficientes c + d = 1 , 3 c + d
y esto significa que c = d = haciendo y3(x) = (x +
3)/4x. Tenemos ahora tres funciones racionales que pasan a través de los tres puntos dados. En realidad
existen otras, pero en cierto sentido éstas son las más simples. En x = 2 las tres funciones nos ofrecen los
Dentro del intervalo (1, 3) las tres se asemejan entre sí hasta cierto punto. Fue­
valores interpolados
ra del mismo difieren en forma considerable. (Véase la figura 23-1.) La diversidad de las funciones raciona­
les excede a la de los polinomios y es muy útil tener conocimiento del tipo de función racional que se re­
quiere.
Fig. 23-1
23.3 Suponga que se sabe que y(x) es de la forma y(x) = (a + bx2)/(c + dx2). Determine y(x) por medio de los re­
querimientos
La sustitución lleva al sistema lineal
Puesto que sólo está comprendido el cociente de los polinomios, un coeficiente puede tomarse igual a 1, a
menos que después resulte ser cero. Intente d = 1. Luego se descubre que
www.elsolucionario.org
433
APROXIMACIÓN POR FUNCIONES RACIONALES
Observe que la función racional y2(x) = 10/(10 + 6x - x2) incluye también estos tres puntos, y de ese modo
se produce y3(x) = (x + 3)/[3(x + 1)].
FRACCIONES CONTINUADAS Y DIFERENCIAS RECÍPROCAS
23.4
Evalúe la fracción continuada
Éstos son otra vez los valores del problema
El cálculo directo muestra que
anterior. El punto aquí es que la estructura de una fracción continuada de esta clase hace estos valores
iguales a las "convergencias" sucesivas de la fracción, esto es, las partes obtenidas por truncamiento de la
fracción antes de los términos x y x - 1 y, desde luego, en el extremo. Se encuentra fácilmente que la frac­
ción se reacomoda además como nuestra y3(x).
23.5
Desarrolle la conexión entre las funciones racionales y las fracciones continuadas en el caso
Seguimos otro camino histórico. Sean los cinco puntos dato (xi yi) para i = 1
ción en estos puntos,
5. Para la coloca­
a0 - b0y + a1x - b1xy + a2x2 - b2x2y = O
para cada par xi y, La ecuación de determinante
tiene claramente las características requeridas. El segundo renglón se reduce luego a 1, 0, 0, 0, 0, 0 me­
diante estas operaciones:
Multiplique la columna 1 por y1 y reste de la columna 2.
Multiplique la columna 3 por y1, y reste de la columna 4.
Multiplique la columna 5 por y1 y reste de la columna 6.
Multiplique la columna 3 por x1 y reste de la columna 5.
Multiplique la columna 1 por x1 y reste de la columna 3.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
434
En este punto el determinante ha sido reemplazado por el siguiente sustituto:
Desarrolle este determinante por su segundo renglón y luego
Divida el renglón 1 por y - y1.
Divida el renglón i, por yi - y1 para i = 2,3,4,5.
Introduciendo el símbolo
la ecuación puede escribirse ahora como
La operación se repite después de esto, para hacer el segundo renglón 1, 0, 0, 0, 0:
Multiplique la columna 1 por p1(x2x1) y reste de la columna 2.
Multiplique la columna 3 por p1(x2x1) y reste de la columna 4.
Multiplique la columna 3 por x2 y reste de la columna 5.
Multiplique la columna 1 por x2 y reste de la columna 3.
El determinante tiene entonces esta forma:
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES RACIONALES
435
Desarrolle por el segundo renglón, y luego:
Divida el renglón 1 por p1(XX1) - p1(X2X1),
Divida el renglón i por p1(Xi+1X1) - p1(X2X1), para i = 2, 3, 4.
Se acostumbra un paso adicional en este punto para asegurar una propiedad de simetría de las cantidades
p que se van a definir. (Véase el problema 23.6.)
Multiplique la columna 1 por y, y sume a la columna 2.
Multiplique la columna 3 por y, y sume a la columna 4.
Introduciendo el símbolo
Otra reducción similar produce
donde
Finalmente, la última reducción consigue
donde
Deducimos que p4(XX1X2X3X4) = p4(X5X1X2X3X4). Las diferentes p, que acaban de introducirse se llaman diferen­
cias recíprocas de orden i, y la igualdad de estas diferencias recíprocas de cuarto orden es equivalente a la
ecuación de determinante con la cual empezamos y que identifica la función racional que estamos buscan­
do.
Las definiciones de diferencias recíprocas conducen ahora de manera natural a una fracción conti­
nuada. Encontramos sucesivamente
www.elsolucionario.org
436
MÉTODOS NUMÉRICOS
donde, en el último denominador, se ha usado al final la igualdad de ciertas diferencias cuartas, lo cual
constituyó la culminación de nuestra extensiva reducción del determinante. Esto es lo que hace a la fracción
continuada anterior la función racional requerida. (Detrás de todos estos cálculos ha estado la suposición
de que los puntos dato pertenecen en realidad a tal función racional, y que el procedimiento algebraico no
se interrumpirá en algún punto. (Véanse los problemas para el caso de excepciones.)
23.6
Pruebe que las diferencias reciprocas son simétricas.
Para las diferencias de primer orden es claro de inmediato que p1(x1x2) = p1(X2X1). En las diferencias de
segundo orden se verifica que
de lo cual resulta que en p2(X1X2X3) la xi puede permutarse en cualquier forma. En el caso de diferencias de
mayor orden la prueba es similar.
23.7
Aplique diferencias recíprocas para recuperar la función y(x) = 1/(1 + x2) de los datos x, y en las primeras
dos columnas de la tabla 23.1.
También aparecen en esta tabla diversas diferencias reciprocas. Por ejemplo, la entrada 40 se obtie­
ne a partir de entradas anidadas como sigue:
De la definición dada en el problema 23.5 esta tercera diferencia debe ser
pero por la propiedad de simetría esto es lo mismo que teníamos. Las otras diferencias se encuentran de la
misma manera.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES RACIONALES
437
Tabla 23.1
La fracción continuada se construye a partir de la diagonal superior
jc-0
y sin dificultad se reacomoda hasta llegar a la expresión original y(x) = 1/(1 + x2). Este caso de prueba ilus­
tra meramente el algoritmo de las fracciones continuadas.
Sustituyendo sucesivamente los argumentos x = 0 , 1 , 2, 3, 4 en esta fracción continuada es fácil ver
que cuando la fracción se vuelve más larga absorbe las parejas dato (x, y) una por una. Esto implica ade­
más que el truncamiento de la fracción producirá una función de colocación racional para un segmento ini­
cial de los datos. Los mismos comentarios son válidos en el caso general del problema 23.5. Debe señalar­
se además que los ceros en la última columna de la tabla ocasionan la terminación de la fracción sin un
término x - x4, pero que la fracción que se trabaja absorbe de cualquier forma los pares de datos (x5 y6).
23.8
Utilice una aproximación racional para interpolar respecto a tan 1.565 partiendo de los datos que se propor­
cionan en la tabla 23.2.
La tabla incluye también diferencias reciprocas hasta de cuarto orden
Tabla 23.2
x
tanx
1.53
24.498
1.54
32.461
.0012558
-.033
.0006403
1.55
48.078
2.7279
-.022
.0002245
1.56
1.57
92.631
-.4167
1.7145
-.0045
.0000086
1255.8
www.elsolucionario.org
MÉTODOS NUMÉRICOS
438
En estas condiciones la interpolación procede del modo siguiente:
tan 1.565 = 24.498 +
1.565-1.53
1.565 -1.54
.0012558 +
1.565-1.55
-24.531 +
1.565 -1.56
2.7266 +
-.3837
que se desarrolla hasta 172.552. Este resultado es casi perfecto, lo que es sobresaliente considerando lo
cerca que nos encontramos al polo de la función tangente en x = n/2. La fórmula regresiva de Newton, empleando los mismos datos produce el valor 433, por lo que es fácil ver que nuestra aproximación racional es
mucho más adecuada. Es interesante notar los resultados obtenidos realizando una interrupción en las primeras diferencias, truncando la fracción en sus "convergencias" sucesivas. Esos resultados son
52.37
172.36
172.552
así que al interrumpir en la tercera y cuarta diferencias encontramos valores idénticos. Esta convergencia
es tranquilizadora, lo que indica implícitamente que son innecesarios más pares de datos y la continuación
de la fracción y que incluso el par final ha servido sólo como comprobación o garantía.
23.9
Es posible que más de una función racional de la forma del problema 23.5 pueda incluir los puntos proporcionados. ¿Cuál producirá el algoritmo de las fracciones continuadas?
Conforme la fracción continuada crece representa sucesivamente funciones de las formas
a0+ a1X
b0 + b1X
a0 + a1x
a0 + a1X + a2x2
b0 + b1x
a0 + axx + a2x2
b0 + b1x + b2x2
Nuestro algoritmo elige la forma más simple (izquierda a derecha) consistente con los datos. Véanse los
problemas 23.4, 23.18 y 23.19 como ejemplos.
23.10 Dado que y(x) tiene un polo simple en x - 0 y es de la forma utilizada en el problema 23.5, determínelo a
partir de los siguientes puntos (x, y): (1, 30), (2,10), (3, 5), (4, 3).
Tal función debe buscarse directamente empezando con
y(x) =
1 + a1x +a2x
bxx + b2x2
También es posible determinarla mediante esta ligera variación del algoritmo de fracciones continuadas. La
tabla de diferencias recíprocas
1
2
3
4
0
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES RACIONALES
439
conduce a la fracción continuada
y = 30 +
x-1
1
20
que fracasa en y(x) = 60/[x(x+1)].
x-2
100
JC-3
3
33 x - 4
20
FUNCIONES RACIONALES MINIMAX
23.11 ¿Cómo puede encontrarse una función racional R(x) - 1/(a + bx) que pierda los tres puntos (x1, y 1 ), (X2, y2)
y (X3, V3) alternadamente por ± h?
Las tres condiciones
pueden escribirse como
Eliminando a y b, encontramos que h es determinada por la ecuación cuadrática.
y1-h
y2 + h
y3-h
(y1-h)x1
(y2 + h)x2
(y3 - h)x3
Eligiendo la raíz con el valor absoluto más pequeño, sustituimos de nuevo y obtenemos a y b. (No es difícil
mostrar que las raíces reales siempre existen.)
23.12 Aplique el procedimiento del problema 23.11 a estos tres puntos: (0, .83), (1,1.06), (2,1.25).
La ecuación cuadrática se vuelve 4h2 = 4.12h - .130 = 0 y la raíz requerida es h = -.03. Los coeficien­
tes a y b satisfacen entonces .86a -1 = 0,1.03a + 1.03b -1 = 0 y son a = 1.16, b = - .19.
23.13 Ampliando el problema anterior, aplique el método de intercambio para encontrar una función racional de la
forma R - 1/(a + bx) para los puntos: (0, .83), (1,1.06), (2,1.25), (4,4.15).
Nuestro problema tendrá una gran semejanza con los métodos de intercambio anteriores. Dejemos
que la tripleta del problema anterior sirva como tripleta inicial. Se encontró que la función de error igual para
esta tripleta es R1(x) - 1/(1.16 - .19x). En los cuatro puntos datos se calcula su error y se encuentran los
valores -.03, .03, -.03,1.65 y vemos que Ri(x) es muy pobre en x - 4. Para una nueva tripleta elegimos los
últimos tres puntos, con el fin de retener signos de error alternos. La nueva ecuación cuadrática es
6h2 - 21.24h + 1.47 = 0
www.elsolucionario.org
440
MÉTODOS NUMÉRICOS
haciendo h - .07. Las nuevas ecuaciones para a y b son
a + b = 1.010
a + 26 = .758
a + 4b = .245
haciendo a = 1.265 y b = .255. Los errores en los cuatro puntos dato son ahora .04, .07, -.07, .07; y puesto
que ningún error excede ei valor de .07 de nuestra presente tripleta interrumpimos el procedimiento, acep­
tando
R2(x) =
1
1.265 - .255x
como la aproximación minimax. Éste es el desarrollo típico de un algoritmo de intercambio. Nuestro resulta­
do es, desde luego, preciso hasta cierto punto, pero los mismos datos se dan sólo hasta en dos lugares, por
lo que un esfuerzo mayor parece no ofrecer garantía. Es interesante notar que el calculo es bastante sensi­
ble. Redondeando, por ejemplo, el tercer dígito 5 en nuestra R2(x) es posible cambiar R2(4) hasta en casi
media unidad. Esta sensibilidad se debe al polo cercano a x = 5. Tanto R1(x) como R2(x) se muestran en la
figura 23-2.
Fig. 23-2
23.14 Los puntos dato del problema precedente se eligieron sumando "ruido" aleatorio de hasta 5 por ciento a ios
valores de y(x) = 4/(5 - x). Utilice R2(x) para calcular valores ajustados y compare con los valores correctos
y los datos originales.
Los valores requeridos son como sigue, con entradas en x - 3 añadidos:
Datos con "ruido" originales
.83
1.06
1.25
—
4.15
Valores de R2(x)
.79
.99
1.32
2.00
4.08
Valores correctos de y(x)
.80
1.00
1.33
2.00
4.00
Sólo el error en x = 4 es considerable y éste se ha reducido en casi la mitad. La influencia del polo en
x = 5 es evidente. La aproximación por medio de polinomios sería bastante menos afortunada.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES RACIONALES
441
23.15 Deduzca las condiciones en los coeficientes de manera que la función racional de Padé
con
satisfará
para N=m + n, suponiendo que y (x) tiene la representación en serie
y(x) = c0 + c1x + c2x2 + • • •
Tenemos
y habremos alcanzado el objetivo requerido si el numerador de la derecha no tiene términos de menor grado que
Para esto necesitamos
a0 =
b0c0
a1
= b0c1 +
b1c0
a2 = b0c2 + b1c1 + b2c0
y en general
sujeto a las restricciones
y
23.16 Aplique el problema precedente a
Para esta función tenemos
Su solución es
llevando a estas ecuaciones:
Sustituyendo de nuevo tenemos finalmente
www.elsolucionario.org
MÉTODOS NUMÉRICOS
442
para la aproximación de Padé. En el intervalo (-1,1) su error absoluto varía de cero en el centro a .004 en x = 1.
Es interesante observar que la aproximación refleja una propiedad básica de la función exponencial, o sea,
que al sustituir x por -x se produce el recíproco.
23.17 Para y(x) = ex es claro que
pero utilice el método del problema 23.15 para encontrar Ro4(x).
Las ecuaciones apropiadas incluyen a0 = 1 y entonces el sistema triangular
conduce a la aproximación
de la cual el denominador es una aproximación de cinco términos para el recíproco de y(x). Presumible­
mente esto podría haberse predicho.
Sobre ( - 1 , 1) R04 es más cercana a ex en la mitad izquierda y más alejada de ella a la derecha, relati­
va a R40. Es inferior en todo a R22 y esto es en general cierto en las aproximaciones de Padé. Aquéllas con
m y n igual o casi igual son las más precisas.
Problemas suplementarios
23.18 Encuentre directamente, como en el problema 23.1, una función y(x) - 1/(a + bx) tal que y(1) = 3 y y(3) - 1.
¿Nuestro método de fracciones continuadas producirá esta función?
23.19 Encuentre directamente una función y(x) = 1/(a + bx + ex2) tal que y(0) = 1,
método de fracciones continuadas producirá esta función?
¿Nuestro
23.20 Utilice el método de fracciones continuadas para encontrar una función racional que tenga los siguientes
valores:
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES RACIONALES
443
23.21 Utilice el método de las fracciones continuadas para encontrar una función racional que tenga los siguientes
valores:
23.22 Encuentre una función racional con los siguientes valores:
23.23 Encuentre una función racional con los siguientes valores:
(El símbolo
se refiere a un polo en el cual la función cambia de signo.)
23.24 Encuentre una función racional con los valores que se dan a continuación. Interpole en y(1.5). ¿Dónde
están los "polos" de esta función?
23.25 Encuentre la función minimax
R(x)
1
a + bx
para y(x) = x2 - 1 en el intervalo (-1,1).
23.26 Emplee el método de intercambio para encontrar la aproximación minimax R(x) = 1/(a + bx) para y(x) = ex
sobre el intervalo (0, 3).
23.27 Desarrolle un método de intercambio para encontrar la aproximación minimax R(x) = (a + bx)/(1 + dx) para
un conjunto de puntos (xi, yi), donde i = 1 N. Aplíquelo a los siguientes datos:
www.elsolucionario.org
MÉTODOS NUMÉRICOS
444
0
1
2
3
4
5
.38
.30
.16
.20
.12
.10
Emplee R(x) para ajustar los valores y. ¿Cuánto se acerca a y(x) = 1/(x + 3), que fue la función padre de es­
tos datos, con errores aleatorios añadidos?
23.28 Encuentre una función racional que incluya estos puntos:
-
1
∞
0
1
4
2
2
34
4
7
23.29 Encuentre una función racional que incluya estos puntos:
23.30 Encuentre una función racional que incluya los siguientes puntos. ¿La función tiene algún polo real?
23.31 Interpole en y(1.5) en la tabla siguiente, empleando una función de aproximación racional.
23.32 Encuentre una función racional, en la forma de un polinomio cúbico sobre uno cuadrático, que incluya los
siguientes puntos:
23.33 Trabaje en el problema 23.16 con m = 3, n = 1.
23.34 Trabaje en el problema 23.16 con m = 1, n = 3.
www.elsolucionario.org
Aproximación por funciones
trigonométricas
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el significado de funciones trigonométricas (Introducción).
2. Explicar con sus propias palabras el concepto de aproximación polinomíal mediante funciones
trigonométricas (Introducción).
3.
Explicar con sus propias palabras cuando menos cinco ventajas y cinco desventajas de aproximación
polinomial mediante funciones trigonométricas (Introducción).
4. Demostrar las condiciones de ortogonalidad de la función trigonométrica única de colocación (caso
discreto) (Introducción, Problema 24.1).
5. Desarrollar la función trigonométrica única de colocación y sus coeficientes, para un número par e
impar de puntos (caso discreto) (Introducción, Problemas 24.1 a 24.4).
6. Encontrar funciones trigonométricas de colocación en puntos predeterminados, dados ciertos datos
de la función e interpolar en puntos desconocidos (Introducción, Problemas 24.1 a 24.5, 24.40,
24.41).
7. Desarrollar y aplicar la función trigonométrica única de colocación y sus coeficientes, para un
número par e impar de puntos (caso discreto) empleando el método de mínimos cuadrados
(Introducción, Problemas 24.1, 24.6, 24.7, 24.43 a 24.45).
8. Desarrollar y aplicar la función trigonométrica única de colocación y sus coeficientes, para un
número par e impar de puntos (caso discreto) empleando el método de funciones periódicas
(Introducción, Problemas 24.8 á 24.12, 24.46, 24.47).
9. Demostrar las condiciones de ortogonalidad de las series de Fourier (caso continuo) (Introducción,
Problema 24.13).
10. Desarrollar y aplicar las series de Fourier de colocación y sus coeficientes, para datos continuos
(caso continuo) (Introducción, Problemas 24.13 a 24.19,24.48 a 24.52).
11. Desarrollar y aplicar empleando el método de mínimos cuadrados, las series de Fourier de
colocación y sus coeficientes, para datos continuos (caso continuo) (Introducción, Problemas 24,20,
24.21).
12. Explicar con sus propias palabras las bases del método de análisis de Fourier para efectuar la
suavización de datos (Introducción, Problemas 24.22, 24.53).
13. Aplicar el método de análisis de Fourier para efectuar la suavización de datos (Introducción,
Problemas 24.23, 24.24, 24.54).
14. Explicar con sus propias palabras las dos principales aplicaciones de la aproximación por funciones
trigonométricas dentro de los métodos numéricos (Introducción, Problemas 24.23,24.24)
www.elsolucionario.org
446
MÉTODOS NUMÉRICOS
15. Demostrar las propiedades de ortogonalidad de la función exponencial, para formas complejas
(Introducción, Problemas 24.25, 24.27)
16.
Desarrollar la fórmula de los coeficientes de Fourier para el caso complejo (Introducción, Problema
24.26).
17. Proponer las bases para el desarrollo del algoritmo de transformación rápida de Fourier (TRF), que
en inglés es "Fast Fourier Transforms (FFT)" (Introducción, Problemas 24.28 a 24.31, 24.55, 24.56).
18. Desarrollar y evaluar la eficiencia del algoritmo de transformación rápida de Fourier (TRF), que en el
inglés es "Fast Fourier Transforms (FFT)" (Introducción, Problemas 24.32, 24.33).
19. Aplicar y evaluar la eficiencia del algoritmo de transformación rápida de Fourier (TRF) o (FFT) en
Problemas reales (Problemas 24.34 a 24.39, 24.57 a 24.64).
APLICACIONES DE LA APROXIMACIÓN POLINOMIAL
POR FUNCIONES TRIGONOMÉTRICAS:
Como podremos ver en este libro, el tema de aproximación de funciones con sus ventajas y desventajas, se
ha tratado ampliamente en varios capítulos, como son el 9,12,21,22,23, y 24.
Este capítulo trata nuevamente acerca de la aproximación de funciones; sin embargo, los métodos que involucran el uso de funciones trigonométricas y series de Fourier son un poco más sofisticados que los vistos
en capítulos previos, y por lo mismo a menudo se tratan como casos especiales de métodos numéricos.
Una de las razones más importantes es que los cálculos analíticos de funciones complicadas, tales como las trigonométricas, son tediosos y difíciles, de manera que antiguamente se empleaban tablas calculadas con
mucho esfuerzo y en la actualidad los métodos antiguos se han sofisticado y desarrollado para brindarnos métodos que puedan simularse en computadoras o calculadoras y que nos proporcionen resultados adecuados,
aprovechando las características de los equipos actuales, tales como precisión, recurrencia y rapidez.
El empleo de polinomios trigonométricos es muy frecuenté así como el de funciones de Fourier; ésta es
la razón de que se traten en capítulo aparte.
Fundamentalmente en este tema se tratará de encontrar un polinomio trigonométrico interpolante para
puntos que representen a los datos.
La interpolación de grandes cantidades de datos equiespaciados, mediante polinomios trigonométricos
puede producir resultados muy exactos. Esta técnica es muy apropiada para emplearse en áreas de simulación de procesos, mecánica cuántica y óptica.
Hasta antes de desarrollarse el algoritmo de trasformación rápida de Fourier (TRF), que en inglés es
"Fast Fourier Transforms (FFT)", también conocido como el algoritmo de Cooley-Tukey, la interpolación de 2m
puntos requiere por cálculo directo (2m)2 multiplicaciones y (2m)2 sumas, lo cual en grandes cantidades de datos
requiere tal cantidad de cálculos que acarrean un excesivo error de redondeo por lo que se hace inútil la aproximación; por esta razón no era muy popular.
En la actualidad y debido a un trabajo que se inició antes de 1965, cuyos resultados fueron publicados en
ese año por J. W. Cooley y J. W. Tukey, se emplea el algoritmo; este método requiere sólo de (m log2 m) multiplicaciones y de (m log2 m) sumas, siempre y cuando m se elija apropiadamente (recordar que el número de puntos
es de 2m).
El método ha causado una revolución en el uso de los polinomios trigonométricos interpolantes en
diversas áreas científicas y consiste en la organización del problema de manera que el número de datos que se
estén usando pueda factorizarse fácilmente, particularmente en potencias de dos.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
447
Algunas de las propiedades tan favorables de los polinomios, las tienen también las seríes de Fourier,
éstas son una herramienta extremadamente útil para describir la solución de varias ecuaciones diferenciales
ordinarias y parciales, que aparecen en situaciones físicas.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Métodos numéricos
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación por funciones racionales
Aproximación por funciones trigonométricas
Manejo de funciones discretas
Sumas (sumatorias)
Sumas y series
Aproximación polinomial mediante interpolación
Interpolación por segmentos (Splines)
Interpolación
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación por funciones trigonométricas
Operación de polinomios
Diferenciación numérica
Integración numérica
1
2
.
.
10
11
13
14
21
22
23
24
5
17
9
12
21
22
23
24
13
14
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Aproximación polinomial por funciones racionales
Aproximación por funciones trigonométricas
Álgebra no lineal y optimización
21
22
23
24
Raíces de ecuaciones
25
Ceros de polinomios
Método de descenso más rápido (gradiente)
25
25
www.elsolucionario.org
448
MÉTODOS NUMÉRICOS
INTRODUCCIÓN
Recordaremos un poco acerca del tema de funciones que normalmente se tratan en los cursos de cálculo.
Función polinomial: Aquélla dada por un polinomio en X, de grado n; Pn(X) - F(X)
y = a0xn + a1xn-1 + a2xn-2 + a3xn-3 + • • • + an-1 x + a
Toda función polinomial es una función racional y toda función racional es una función algebraica.
Funciones trascendentes: Aquellas funciones que no son algebraicas, tales como las funciones trigonométri­
cas (seno, coseno, etc.), exponenciales y logarítmicas.
D A T O S DISCRETOS
Las funciones seno y coseno comparten muchas de las características deseables de los polinomios. Se cal­
culan con facilidad, mediante series que convergen rápidamente. Sus derivadas sucesivas son otra vez senos y
cosenos, cumpliéndose entonces lo mismo para las integrales. También tienen propiedades de ortogonalidad y,
desde luego, periodicidad, que no tienen los polinomios. Es por consiguiente comprensible la utilización de estas
funciones trigonométricas familiares en la teoría de aproximaciones.
Una suma trigonométrica que se coloca con una función dada determinada en 2L + 1 argumentos prescritos
puede obtenerse en la forma
utilizándose una forma un poco diferente si el número de argumentos de colocación es par. Una propiedad de ortogonalidad de estos senos y cosenos,
permite que los coeficientes se determinen con facilidad como
Estos coeficientes proporcionan una función de colocación única de la forma especificada. Para un número par de
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
argumentos de colocación, digamos 2L, la fórmula correspondiente es
con
Las aproximaciones por mínimos cuadrados para los mismos datos discretos, que emplean el mismo tipo de
suma trigonométrica, se obtienen simplemente mediante el truncamiento de la suma de colocación, que es un re­
sultado conocido y conveniente. Como se observó en el problema 21.8 esto también se cumple con otras repre­
sentaciones en términos de funciones ortogonales. Lo que se minimiza aquí, en el caso de 2L + 1 argumentos, es
donde TM(x) es la suma abreviada (donde M es menor que L)
El resultado que acaba de establecerse significa que para minimizar S debemos elegir Ak = ak Bk = bk. El valor mí­
nimo de S puede expresarse como
Para M = L esto sería cero, lo cual difícilmente es una sorpresa puesto que entonces tenemos otra vez la suma de
colocación.
La periodicidad es una característica obvia de las sumas trigonométricas. Si una función dato y(x) no es bá­
sicamente periódica, aún puede ser útil construir una aproximación trigonométrica, siempre que estemos interesa­
dos sólo en un intervalo finito. Puede entonces imaginarse la y(x) dada extendida fuera de este intervalo de una
manera tal que la haga periódica.
Las funciones impar y par se utilizan comúnmente como extensiones. Una función impar tiene la propiedad
y(-x) = -y(x). El ejemplo clásico es y(x) = cos x. En el caso de una función par de periodo P=2L, los coeficientes
se vuelven
Una función par tiene la propiedad y ( - x) = y(x). El ejemplo clásico es y(x) = cos x. Para una función par del perio­
do P = 2L, los coeficientes son
Estas simplificaciones explican la popularidad de las funciones impar y par.
www.elsolucionario.org
450
MÉTODOS NUMÉRICOS
D A T O S CONTINUOS
La serie de Fourier reemplaza las sumas trigonométricas finitas cuando el suministro de datos es continuo,
siendo análogos muchos de los detalles. Para y(x) definida sobre (0, 2π), la serie tiene la forma
Una segunda propiedad de los senos y cosenos,
permite la fácil identificación de los coeficientes de Fourier como
Puesto que la serie tiene periodo 2π, debemos limitar su utilización al intervalo dado (0, 2π) a menos que suceda
que y(x) también tenga este mismo periodo. Las funciones no periódicas pueden acomodarse sobre un intervalo fi­
nito, si las imaginamos extendidas como periódicas. Otra vez, las extensiones impar y par son las más comunes y
en tales casos los coeficientes de Fourier se simplifican mucho como antes.
Los coeficientes de Fourier están relacionados con los coeficientes de colocación. Tomando el ejemplo de
un número impar de argumentos tenemos, por ejemplo,
que es la aproximación de la regla trapezoidal para
en la cual se ha utilizado un cambio de argumento para presentar la analogía.
Las aproximaciones por mínimos cuadrados en el caso de datos continuos se obtienen mediante el truncamiento de la serie de Fourier. Esto minimizará la integral
donde
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
451
En otras palabras, para minimizar / debemos elegir Ak = αk, Bk - βk. El valor mínimo de / puede expresarse como
La convergencia en la media ocurre bajo suposiciones muy ligeras sobre y(t). Esto significa que, para M que
tiende al infinito, /m/n tiene límite cero.
APLICACIONES
Las dos aplicaciones principales de la aproximación trigonométrica en el análisis numérico son:
1.
El ajuste de datos. Puesto que las aproximaciones por mínimos cuadrados se aprovechan de manera
muy conveniente mediante truncamiento, esta aplicación parece natural, siendo similar el efecto de ajuste
del principio de mínimos cuadrados al observado en el caso de polinomios.
2.
La diferenciación aproximada. Aquí también el aspecto de mínimos cuadrados de la aproximación trigo­
nométrica se vislumbra en el fondo. Algunas veces los resultados de aplicar una fórmula tal como
-2y(x - 2) -y(x - 1) + y(x + 1) + 2y(x + 2)]
obtenida antes de una parábola de mínimos cuadrados, son ajustados aún más con el uso de una suma
trigonométrica. El peligro de un sobreajuste, que elimina aspectos esenciales de la función objetivo, debe
mantenerse en mente.
F O R M A S COMPLEJAS
Todo lo anterior puede también representarse en forma compleja. Las sumas trigonométricas se convierten en
donde i es la unidad imaginaria. Debido a la fórmula de Euler
esto es equivalente a
con
Los coeficientes ai bi, ci pueden ser reales o complejos. La serie de Fourier se vuelve
con los coeficientes de Fourier
www.elsolucionario.org
452
MÉTODOS NUMÉRICOS
La suma finita
donde xn = 2πn/N para n = 0 hasta N = 1, es una aproximación obvia a fj y es también el coeficiente apropiado en
la suma trigonométrica que interpola f(x) en los puntos dato xn.
Las ti son en esencia los elementos de la llamada transformación discreta de Fourier. Dado un vector V con com­
ponentes V0 a VN-1 la transformación discreta de Fourier de V puede definirse como el vector V con componentes
para j = 0 hasta j = N - 1 y ωN una raíz n-ésima de 1.
Estas relaciones diferentes se explorarán en los problemas.
Lo anterior significa que es posible calcular aproximaciones a los coeficientes de Fourier fi empleando trans­
formadas discretas. El empleo de la Transformada Rápida de Fourier (TRF) ha hecho eficientes tales cálculos in­
cluso para valores bastante más grandes que N. Estos coeficientes son de interés en muchas aplicaciones, puesto
que ellos proporcionan los pesos relativos de ios términos componentes en un proceso periódico complejo.
Problemas resueltos
S U M A S TRIGONOMÉTRICAS POR COLOCACIÓN
24.1
Demuestre las condiciones de ortogonalidad
para j + k
N.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
453
Las pruebas son por trigonometría elemental. Como ejemplo,
y cada suma de cosenos es cero puesto que los ángulos comprendidos están espaciados simétricamente
entre 0 y 2π, excepto cuando j = k ǂ 0, en cuyo caso la primera suma de cosenos es (N + 1)/2. Las otras
dos partes se prueban de modo similar.
24.2
Para la colocación en un número impar de argumentos x = 0, 1
tomar la forma
N - 2L, la suma trigonométrica puede
Emplee el problema 24.1 para determinar los coeficientes ak y bk.
Para obtener aj multiplique por
y sume. Encontramos
puesto que los demás términos a la derecha son cero. El factor
hace que también este resultando
sea cierto para j = 0. Para obtener bj multiplicamos y(x) por
y sumamos, obteniendo
De tal modo sólo una expresión de esas características puede representar una y(x) dada, determinándose
en forma única los coeficientes mediante los valores de y(x) en x = 0,1
2L Note que esta función ten­
drá periodo N + 1.
24.3 Compruebe que, con los coeficientes del problema 24.2, la suma trigonométrica igual a y(x) para x = 0 , 1 , . .
. , 2L Esto demostrará la existencia de una suma única de este tipo que se coloca con y(x) para estos
valores.
Denominando por ahora T(x) a la suma y dejando que x' sea uno de los 2L + 1 argumentos, la sustitu­
ción de nuestras fórmulas para los coeficientes conduce a
en la cual el orden de la suma se ha alterado. Después de esto la última suma se escribe como
www.elsolucionario.org
454
MÉTODOS NUMÉRICOS
que es posible debido a la propiedad de simetría
de la función coseno. Completando ahora en el término k-0, encontramos
Pero el término en los paréntesis es cero por las condiciones de ortogonalidad a menos que x = x cuando
se vuelve 2L + 1. De tal modo T(x") = y(x"), que es lo que se quería demostrar.
24.4 Suponga que se sabe que y(x) tiene periodo 3. Encuentre una suma trigonométrica que incluya los siguien­
tes puntos dados y utilícela para interpolar para
0
1
2
0
1
1
Empleando las fórmulas del problema 24.2, encontramos
24.5
Para un número par de valores x(N + 1=2L) la suma de colocación es
con la colocación en x = 0, 1, . . ., N. Los coeficientes se encuentran mediante un argumento casi idéntico
al de los problemas 24.1 y 24.2 y son
Se observa otra vez que la función y(x) tiene el periodo N + 1. Aplique estas fórmulas a los datos que si­
guen, y calcule después el máximo de y(x).
0
1
2
3
0
1
1
0
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
455
Por lo tan­
Encontramos
to, la suma trigonométrica es
El máximo de y(x) se encuentra en estas circunstancias mediante procedimientos estándar y su valor es
S U M A S TRIGONOMÉTRICAS POR M Í N I M O S C U A D R A D O S , D A T O S DISCRETOS
24.6
Determine los coeficientes AK y Bk de modo que la suma de cuadrados
donde Tm(x) es la suma trigonométrica
y M ≤ L.
Puesto que por el problema 24.3 tenemos
la diferencia es
Elevando al cuadrado, sumando sobre los valores x, y utilizando las condiciones de ortogonalidad,
Sólo los dos primeros términos dependen de las Ak y Bk, y como estos términos son no negativos la suma
mínima puede lograrse de una manera única, haciendo cero estos términos. De modo que para un mínimo,
Ak =
ak
Bk = bk
y tenemos el importante resultado de que el truncamiento de la suma de colocación T(x) en k = M produce
la suma trigonométrica por mínimos cuadrados TM(x). (Esto es en realidad otro caso especial del resultado
www.elsolucionario.org
456
MÉTODOS NUMÉRICOS
general encontrado en el problema 21.8.) Encontramos también
Puesto que un cálculo casi igual muestra que
esto también puede expresarse en la forma
Cuando M aumenta esta suma disminuye uniformemente, llegando a cero para M = L, puesto que entonces
las sumas por mínimos cuadrados y de colocación son idénticas. Un resultado un poco similar se cumple
en el caso de un número par de x argumentos.
24.7
Aplique el problema 24.6 con M - 0 a los datos del problema 24.4
El truncamiento conduce a
FUNCIONES PERIÓDICAS IMPARES O PARES
24.8
Suponga que y(x) tiene el periodo P = 2L, esto es, y(x + P) = y(x) para todo x. Muestre que las fórmulas
para a¡ y b¡ en el problema 24.5 pueden escribirse como
Puesto que el seno y el coseno tienen también periodo P, no hay diferencia entre el uso de valores
x = 0, . . . . 2L - 1 o valores -L + 1
L. Cualquier conjunto tal de valores consecutivos P llevará a los
mismos coeficientes.
24.9
Suponga que y(x) tiene el período P = 2L y que además es una función impar, esto es, y(-x) = -y(x).
Pruebe que
Por la periodicidad, y(0) = y(P) = y{-P). Pero como y(x) es una función impar, y(-P) - -y(P) también.
Esto implica y(0) = 0. En la misma forma encontramos y(L) = y(-L) = -y(L) = 0. Por tanto, en la suma para a¡
cada término restante en x positiva cancela su pareja en x negativa, por lo que todas las a, serán cero. En la
suma para b¡ los términos para x y -x son idénticos y de ese modo encontramos bj, duplicando la suma so­
bre x positiva.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
457
24.10 Encuentre una suma trigonométrica T(x) para la función del problema 24.5, suponiendo que excede a una
función impar de periodo P = 6.
Por el problema previo todas las aj = 0, y como L = 3,
24.11 Si y(x) tiene el periodo P = 2L y es una función par, esto es y(-x) = y(x), muestre que las fórmulas del
haciendo 24.8 se vuelven
problema
Los términos para ±x en la fórmula para b¡ se cancelan en pares. En la fórmula de aj los términos para
x = 0 y x = L pueden ser separados como antes, después de lo cual los términos restantes vienen en pares
para ±x.
24.12 Encuentre una T(x) para la función del problema 24.5 suponiendo que se extiende a una función par de
periodo 6. (Esto hará tres representaciones de los datos mediante sumas trigonométricas, pero en formas
diferentes. Véanse los problemas 24-5 y 24.10.)
Todas las b¡ serán cero, y con L = 3 encontramos
DATOS CONTINUOS. LA SERIE DE FOURIER
24.13 Pruebe las condiciones de ortogonalidad
donde j, k = 0 , 1 , . . . hasta infinito.
Las demostraciones corresponden al cálculo elemental. Por ejemplo,
www.elsolucionario.org
haciendo
MÉTODOS NUMÉRICOS
458
y cada integral del coseno es igual a cero puesto que el intervalo de integración es un periodo del coseno,
excepto cuando j = k ǂ 0, en cuyo caso la primer integral se vuelve
Las otras dos partes se demues­
tran de modo similar.
24.14 Obtenga las fórmulas de los coeficientes
de la serie de Fourier
Éstos son llamados los coeficientes de Fourier. De hecho, todos estos coeficientes en sumas o series de
funciones ortogonales se llaman a menudo coeficientes de Fourier.
La demostración sigue un camino similar. Multiplique y(t) por cos jt e integre sobre (0, 2π). Todos los
términos salvo uno a la derecha son cero y surge la fórmula para α¡. El factor en el término α0 hace que
también el resultado sea cierto para j = 0. Para obtener βj, multiplicamos por sen jt e integramos. Aquí esta­
mos suponiendo que la serie convergerá a y(t) y que es válida la integración término por término. Esto se
demuestra, bajo suposiciones muy ligeras acerca de la continuidad de y(t), en la teoría de las series de
Fourier. Claramente y(t) debe tener también el periodo 2π.
24.15 Obtenga la serie de Fourier para y(t) - |f|, -π
f ≤ π.
Dejemos que y(t) se extienda a una función par de periodo 2π. (Véase la curva continua en la figura
24-1.) Los límites de integración en nuestras fórmulas de los coeficientes pueden cambiarse a (-π, π) y ve­
mos que todas las p¡ = 0. Además α0 = π; y para y > 0
Así
Fig. 24-1
24.16 Obtenga la serie de Fourier para y(t) =f, -π ≤ f ≤ π.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
459
Fig. 24-2
Extendemos y(t) a una función impar de período 2π. (Véase la figura 24-2.) Cambiando otra vez a los
y
limites (-π, π) encontramos todas las
De tal modo
Observe que la serie del coseno del problema 24.15 converge más rápidamente que la serie del seno. Esto
se relaciona con el hecho de que la y(t) de ese problema es continua, en tanto que ésta no lo es. Cuanto
más uniforme es y(t), tanto más rápida es la convergencia. Observe también que en los puntos de disconti­
nuidad nuestra serie seno converge a cero, que es el promedio de los valores extremos de la derecha y la
izquierda (π y -π) de y (f).
24.17 Encuentre la serie de Fourier para
Extendiendo la función a una función impar de período 2π, tenemos el resultado que se muestra en la
figura 24-3. Note que esta función no tiene esquinas. En f - 0 su derivada es π desde ambos lados, en tanto
que y'(π) y y'(-π) son -π por lo que incluso la función periódica extendida no tiene esquinas o picos. Esta
continuidad extra afectará los coeficientes de Fourier. Empleando los límites (-π, π) encontramos otra vez
Fig. 24-3
www.elsolucionario.org
460
MÉTODOS NUMÉRICOS
todas las αj = 0, y
Esta serie es por consiguiente
Los coeficientes disminuyen como cubos recíprocos, lo cual contribuye a una convergencia muy satisfacto­
ria. La continuidad extra de la función ha resultado útil.
24.18 Muestre que para la función de Bernoulli
Fn(x) = Bn(x)
0
≤ x ≤ 1 Fn( x ± m) =
Fn(x)
m un entero
siendo Bn(x) un polinomio de Bernoulli, la serie de Fourier es
cuando n es par, y
cuando n es impar. Este resultado se utilizó en el problema 17.28 del capítulo sobre sumas y series.
Puesto que
cientes y es
la serie para F1(x) puede encontrarse directamente de las fórmulas de coefi­
Integrando y recordando
encontramos rápidamente
La siguiente integración hace
y una inducción puede utilizarse para completar una prueba formal. (Aquí es útil saber que la integración de
una serie de Fourier término por término produce siempre la serie de Fourier de la función integrada.) El
enunciado análogo para la diferenciación no es generalmente teórico de las series de Fourier.
24.19 ¿Cómo se relacionan los coeficientes de colocación del problema 24.5, o del problema 24.2, con los coeficientes de Fourier del problema 24.14?
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
461
Hay muchas maneras de hacer las comparaciones. Una de las más interesantes es notar que en el
problema 24.5, suponiendo que y(x) tiene periodo P = 2L, podemos reescribir a¡ como
y ésta es la aproximación de la regla trapezoidal para el coeficiente de Fourier
Se cumplen resultados similares para b¡ y Bj así como para los coeficientes en el problema 24.2. Puesto
que la regla trapezoidal converge a la integral para L volviéndose infinita, vemos que los coeficientes de co­
locación convergen a los coeficientes de Fourier. (En este caso podemos fijar el período en 2π por conve­
niencia.) Para una analogía con los polinomios de Chebyshev véanse los problemas del 21.53 al 21.55.
MÍNIMOS CUADRADOS, DATOS CONTINUOS
24.20 Determine los coeficientes Ak y Bk de modo que la integral
será un mínimo donde
Más o menos como en el problema 24.6, encontramos primero
y elevando luego al cuadrado, integrando y utilizando las condiciones de ortogonalidad para obtener
Para un mínimo elegimos todas las
por lo que
Otra vez tenemos el importante resultado de que el truncamiento de la serie de Fourier en k=M produce la
suma de mínimos cuadrados TM(t). (Otra vez éste es un caso especial del problema 21.8.) La integral míni­
ma puede reescribirse como
Cuando M aumenta, ésta disminuye; y se demuestra en la teoría de las series de Fourier que lmin tiende a
cero para M que se vuelve infinita. Esto recibe el nombre de convergencia en la media.
www.elsolucionario.org
462
MÉTODOS NUMÉRICOS
24.21 Encuentre la suma de mínimos cuadrados con M = 1 para la función y(t) del problema 24.15.
El truncamiento produce T1t) = π/2 = (4/π) cos t. Esta función se muestra como una línea interrumpida
en la figura 24-1. Note que ella alisa los picos de y(t).
AJUSTE MEDIANTE EL ANÁLISIS DE FOURIER
24.22 ¿Cuál es la base del método del análisis de Fourier para el ajuste de datos?
Si consideramos a los datos numéricos dados como valores verdaderos de una función con errores
aleatorios superpuestos, siendo las funciones verdaderas relativamente uniformes y los errores superpues­
tos bastante poco uniformes, los ejemplos en los problemas 24.15 y 24.17 indican entonces una manera de
separar parcialmente las funciones del error. Puesto que la función verdadera es uniforme, sus coeficientes
de Fourier disminuirán con rapidez. Pero la falta de uniformidad de los errores indica que sus coeficientes de
Fourier pueden reducirse en forma muy lenta, si los hay. La serie combinada, por tanto, consistirá casi por
completo de error más allá de cierto lugar. Si simplemente truncamos la serie en el lugar correcto, estamos
descartando entonces la mayor parte del error. Seguirá habiendo contribuciones al error en los términos re­
tenidos. Puesto que el truncamiento produce una aproximación por mínimos cuadrados, también podemos
considerar este método como ajuste por mínimos cuadrados.
24.23 Aplique el método del problema previo a los siguientes datos:
Suponiendo que la función es verdaderamente cero en ambos extremos, es posible asumir que se ex­
tiende a una función impar de periodo P = 40. Dicha función tendrá incluso una primera derivada continua,
que ayuda a acelerar la convergencia de la serie de Fourier. Empleando las fórmulas del problema 24.9,
calculamos ahora las b¡.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
463
La rápida reducción es manifiesta y podemos tomar todas las b¡ más allá de los primeros tres o cuatro térmi­
nos para tener grandes efectos del error. Si se emplean cuatro términos, tenemos la suma trigonométrica
Los valores de esta suma pueden compararse con los datos originales, que fueron en realidad valores de
y{x) = x(400 - x2)/100 contaminados por errores aleatorios introducidos artificialmente. (Véase la tabla 24.1.)
El error RMS de los datos proporcionados fue 1.06 y de los datos ajustados .80.
Tabla 24.1
1
2
3
4
5
6
7
8
9
10
Dado
Correcto
Ajustado
4.3
8.5
10.5
16.0
19.0
21.1
24.9
25.9
26.3
27.8
4.0
7.9
11.7
15.6
18.7
22.7
24.6
26.9
28.7
30.0
4.1
8.1
11.9
15.5
18.6
21.4
23.8
25.8
27.4
28.7
11
12
13
14
15
16
17
18
19
20
Dado
Correcto
Ajustado
30.0
30.4
30.6
26.8
25.7
21.8
18.4
12.7
7.1
30.7
30.7
30.0
28.6
26.2
23.0
18.9
13.7
7.4
29.5
29.8
29.3
28.0
25.8
22.4
18.0
12.6
6.5
24.24 Aproxime la derivada y'(x) = (400 - 3x2)/100 de la función del problema precedente con base en los mismos
datos brindados.
Primero debemos aplicar la fórmula
-2y(x -2)-y(x-l)+y(x-l) + 2y(x + 2)]
deducida antes a partir de la parábola de mínimos cuadrados para los cinco valores x = 2, . . . , x + 2. Con
fórmulas similares para los cuatro valores extremos, los resultados forman la segunda columna de la tabla
24.2. El empleo de esta parábola local de mínimos cuadrados equivale al ajuste local de los datos x, y origi­
nales. Intentaremos ahora un ajuste completo adicional mediante el método de Fourier. Puesto que la deri­
vada de una función impar es par, la fórmula del problema 24.11 es apropiada.
Estos coeficientes se calculan y se obtiene
www.elsolucionario.org
MÉTODOS NUMÉRICOS
464
0
1
2
3
4
5
0
4.81 -1.05 .71
-.05
11
12
13
14
.06
.06
-.03
.11
6
7
8
9
1 0
.05
-.20
.33
.15
.00
15
16
17
18
19
20
.06
.14
-.04
.16
-.09
.10
.06
La aguda caída es otra vez notable. Despreciando todos los términos más allá de y = 4, tenemos
El cálculo de esto para x = 0
20 produce la tercera columna de la tabla 24.2. La última columna brinda
los valores correctos. El error RMS en la columna 2, después del ajuste local mediante una parábola de mí­
nimos cuadrados, es .54 en tanto que el error RMS en la columna 3, luego del ajuste adicional de Fourier,
es .39.
Tabla 24.2
0
1
2
3
4
5
6
7
8
9
10
Local
Fourier
Correcto
5.3
4.1
3.8
3.7
3.4
3.4
2.6
1.9
1.5
1.2
1.3
4.4
4.4
4.1
3.8
3.4
3.0
2.5
2.1
1.8
1.4
1.0
4.0
4.0
3.9
3.7
3.5
3.2
2.9
2.5
2.1
1.6
1.0
11
12
13
14
15
16
17
18
19
20
Local
Fourier
Correcto
1.1
-.1
-1.2
-2.2
-2.9
-3.6
-4.6
-5.5
-7.1
-6.4
.5
-.1
-.9
-1.8
-2.9
-4.0
-5.0
-5.8
-6.4
-6.6
.4
-.3
-1.1
-1.9
-2.8
-3.7
-4.7
-5.7
-6.8
-8.0
FORMAS COMPLEJAS
24.25 Demuestre ia siguiente propiedad de ortogonalidad de las funciones eijx, ejkx para j y k enteros. La barra su­
perior denota un conjugado complejo.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
465
La prueba es elemental, reduciéndose de inmediato la integral a
para k ǂ j. Pero ésta es igual a 1 en ambos límites y, por tanto, cero. Para k = y, el lado izquierdo en la ex­
presión anterior es claramente 2π.
24.26 Deduzca la fórmula para los coeficientes de Fourier en forma compleja.
La prueba sigue un camino familiar. La serie de fourier es
Multiplicando por eikx e integrando se obtiene
y puesto que todos los términos a la derecha se anulan por la ortogonalidad excepto aquél para el cual j =
k, se encuentra el resultado requerido.
24.27 Muestre que las fundones eijk", eikx son ortogonales en el siguiente sentido.
Aquí como antes xn = 2πn//V.
Encontraremos una suma geométrica con razón
Para / = k tenemos r = 1 y la suma es N. De otro modo la suma de las potencias de r es (1 - rN)/(1 - r) por
una fórmula familiar. Pero rN es e2ni(k-i) que es 1, lo que hace cero el numerador y establece la ortogonalidad.
24.28 Muestre que si N = 2/ + 1 la suma trigonométrica
debe tener coeficientes d¡ = fj si se coloca con la función f(x) en xn = 2πn//V.
www.elsolucionario.org
466
MÉTODOS NUMÉRICOS
Supongamos que la colocación ocurre, y al multiplicar por
y sumar.
Otra vez todos los términos a la derecha son cero excepto uno, para j = k, y tenemos
24.29 ¿Cómo se relacionan los coeficientes f¡ con las transformadas discretas de Fourier?
Sea V el vector con componentes f(x0) f(xN-1). Para N = 2/ + 1 esto hace V (21 + 1)-dimenslonal,
como es el vector de coeficientes f¡ para la suma trigonométrica
en la cual
para
Comparando con
donde xn =- 2πn/N, y j = 0 a y = N - 1, la correspondencia es sobresaliente. Tenemos un problema: los inter­
valos de validez no coinciden. Pero podemos deducir que en donde se traslapan los intervalos, de j = 0
a j =/,
Observamos ahora que
para j + N = 0
a j= - / .
N - 1 o j = -1
- N. Otra vez tenemos una correspondencia, esta vez para/ - -1
Aparte del factor 1/N las componentes vT igualan, por tanto, los coeficientes f¡', aunque en un orden un poco
revuelto, tomando las vT en su orden natural v0T a V21T es fácil verificar que el orden de los coeficientes será
este.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
467
24.30 Efectúe los detalles del problema precedente para el ejemplo simple V = (1, 0, -1).
Aquí N = 3 y / = 1.
Esto hace
y tenemos directamente los tres coeficientes. Regresando a la transformada,
encontramos
y se confirma la correspondencia descubierta en el problema 24.29.
24.31 ¿Cuál es la idea central detrás de la Transformada Rápida de Fourier?
Cuando N es el producto de enteros, el número resulta ser estrechamente interdependiente. Esta
interdependencia puede explotarse para reducir en forma sustancial la cantidad de cálculo que se requiere
para generar estos números.
24.32 Desarrolle la TRF para el caso más simple, cuando N es el producto de dos enteros t1 y t2.
Sea j = y1 + t1j2 y n = n2 + t2n1,. Entonces para j1 n1 = 0 a t1 - 1, y y2 n2 = 0 a t2 - 1 tanto j como n reco­
rren sus series requeridas de 0 a N - 1. Ahora
puesto que
La transformada puede entonces escribirse como una doble suma
Esto también puede arreglarse en un algoritmo de dos pasos.
24.33 ¿Cuál es la ganancia al calcular la eficiencia si se utiliza la TRF del problema 24.32? En otras palabras,
¿qué tan rápida es la TRF?
Para calcular F, hay que procesar t1 términos; para calcular F2 hay t2. El total es t1 + t2. Esto debe reali­
zarse para cada par (/1, n2) y (j1 j2), o pares N. El conteo final es de este modo N(t1 +t 2 ) términos procesa­
dos. La forma original de la transformada
www.elsolucionario.org
468
MÉTODOS NUMÉRICOS
procesa N términos para cada
estándar es, en consecuencia
un total de N2 términos. La ganancia en eficiencia, si se mide mediante este
y depende en gran parte de N. Para un conjunto pequeño de datos, digamos N = 12 = 3 x 4, la TRF necesi­
tará aproximadamente del tiempo de cálculo de un planeamiento directo. Esto no es muy significativo pe­
ro indica la dirección de las cosas que habrán de venir.
24.34 Aplique la TRF del problema 24.32 para el siguiente vector:
La pequeña escala del problema, N = 6, permite ver con facilidad todos los detalles. Aquí N = t1t2 = 2 x 3 por
lo que encontramos primero los valores F1, de
y resultan ser los siguientes, con
Por tanto
que lleva a, puesto que
y similarmente
i
Note que estuvieron implicados Nt1, términos en el cómputo de los valores F1 y Nt2 términos en la obtención
de F2, un total de 12 + 18 - 30 términos. El cálculo directo habría utilizado 36 y confirmaría los resultados
que acaban de encontrarse. Note también el orden de procesamiento de los pares j1 j2. En lenguaje de pro­
gramación, el enlace j2 es externo al enlace j1.
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
469
24.35 Extienda la TRF del problema 24.32 al caso N = t1t2t3
Los detalles indicarán la forma de generalizar a productos aún más largos. Sea
y observe que de los nueve posibles términos de potencias en
tres contendrán el producto t1t2t3 y pueden despreciarse ya que
como sigue en la transformada,
Los seis restantes pueden agruparse
con n1, apareciendo sólo en la suma interior y sin que aparezca n2 en la exterior. Como antes, esta suma tri­
ple puede expresarse como un algoritmo, teniendo esta vez tres etapas.
Ésta es la TRF requerida.
24.36 Estime el ahorro en el tiempo de cómputo si se utiliza este algoritmo.
En cada uno de los tres pasos el número de tripletas, tales como (j1, na n3), que deben procesarse es
t1t2t3 = N. Encontramos que el número de términos en las suma es, a su vez, t1, t2 t3. Esto hace un total de
W(t1 + t2 + t3) términos. La transformada en la forma que se define utiliza aún N2 términos, por lo que la efi­
ciencia de la TRF puede estimarse como
Si, por ejemplo, N = 1000 = 1 0 x 1 0 x 1 0 , sólo 3 por ciento del 1 000 000 de términos originales son nece­
sarios.
24.37 Corra el algoritmo de la TRF del problema 24.35 en forma manual para el siguiente vector de entrada.
Tenemos N = 8 = 2 x 2 x 2 , lo que produce j = j1 + 2j2 + 4j3 y n = n3 + 2n2 + 4n,. La fórmula para F1, es
www.elsolucionario.org
470
MÉTODOS NUMÉRICOS
entonces
y tenemos
con
abreviando a
Observe que se utilizan Nt1= 8 x 2 términos. Después empleamos
para calcular
y por último
para obtener la transformada
Se han procesado un total de N(t1 + t2 + t3) = 48 términos, sólo un pequeño ahorro con respecto a N2 =64
debido a los problemas de pequeña escala.
24.38 La transformada discreta inversa puede definirse mediante
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
471
Muestre que esta definición produce una relación inversa insertando uj = vT y descubriendo que vk-T = vk. Es­
to es, las componentes del vector original V se han vuelto a ganar.
Conviene escribir primero el resultado del problema 24.31 usando
para obtener
para
en el intervalo (0, N -1). Después de esto
siendo la última suma cero, a menos que n tome el valor k, tenemos rápidamente la vk predicha.
24.39 Invierta la transformada que se encontró en el problema 24.37.
Podría utilizarse la TRF, pero en vista del gran número de componentes cero ésta es una buena opor­
tunidad para proceder directamente.
Las componentes restantes pueden verificarse como el problema 24.63.
Problemas suplementarios
24.40 Aplique el método del problema 24.2 a los datos siguientes.
0
1
2
3
4
0
1
2
1
0
24.41 Deduzca la fórmula de los coeficientes del problema 24.5.
www.elsolucionario.org
472
MÉTODOS NUMÉRICOS
24.42 Aplique el método del problema 24.5 a los siguientes datos:
24.43 Emplee el resultado del problema 24.6 para obtener las sumas de mínimos cuadrados T0(x) y T1(x) para los
datos del problema 24.40.
24.44 Copie los valores del problema 24.6 para obtener un resultado un poco similar en el caso de un número par
de valores x
24.45 Aplique el problema precedente a los datos del problema 24.42.
24.46 Extienda los datos del problema 24.40 a una función impar de período 8. Encuentre una suma de senos
para representar esta función.
24.47 Extienda los datos del problema 24.40 a una función par de periodo 8. Encuentre una suma de cosenos
para representar esta función.
24.48 Muestre que la serie de Fourier para y(x) - |sen x|, la onda seno "completamente rectificada", es
24.49 Muestre que la serie de Fourier para
para x entre
Emplee el resultado para evaluar las series
24.50 Utilice la serie de Fourier del problema 24.15 para evaluar
24.51 Utilice la serie de fourier del problema 24.16 para mostrar que
24.52 Emplee la serie del problema 24.17 para evaluar
24.53 ¿Cuál es la aproximación trigonométrica de mínimos cuadrados de cuatro términos para la función del
problema 24.48? ¿Cuál es la aproximación de mínimos cuadrados de dos términos?
24.54 Aplique el ajuste de Fourier a los siguientes datos, suponiendo que los valores extremos son realmente
www.elsolucionario.org
APROXIMACIÓN POR FUNCIONES TRIGONOMÉTRICAS
473
cero y extendiendo la función como una función impar. Trate también con otros métodos de ajuste, o com­
binaciones de métodos. Compare los resultados con los valores correctos y(x) = x(1 - x) de donde se ob­
tuvieron los datos proporcionados mediante la adición de errores aleatorios de hasta 20 por ciento. Los ar­
gumentos son x = 0(.05)1.
.00, .06, .10, .11, .14, .22, .22, .27, .28, .21, .22, .27, .21, .20, .19, .21, .19, .12, .08, .04, 00
24.55 compruebe las relaciones de coeficientes
aj, = c¡ + c-j bj = i(c¡ - c - j )
dadas en la sección introductoria, y las relaciones inversas
Deduzca que si las aj b¡ son reales, entonces cj y c-1 deben ser complejos conjugados. Recordando que pa­
ra el polinomio trigonométrico de colocación, tenemos cj = fj, y suponiendo aj, b¡ y f(x) reales, demuestre que
24.56 Proceda como en el problema 24.30 empleando V = (1, - 1 , 0).
24.57 Proceda como en el problema 24.34 empleando este vector V:
n
0
1
2
3
4
5
v„
0
0
1
1
1
0
24.58 Proceda como en el problema 24.37 empleando este vector V:
n
0
1
2
3
4
5
6
7
Vn
1
l+¿
0
l-¿
0
l+¿
0
l-¿
24.59 Confirme el resultado del problema 24.58 aplicando la transformación original
www.elsolucionario.org
474
MÉTODOS NUMÉRICOS
24.60 Empleando cálculo elemental muestre que si t1t2 = N, el mínimo de t1 + t2 ocurre entonces para t1 = t2. Ex­
tienda este resultado al caso t1t2t3 = N. ¿Cuál es la implicación para la TRF?
24.61 Invierta la transformada que se encontró en el problema 24.30.
24.62 Aplique la TRF del problema 24.32 para invertir el resultado del problema 24.34.
¿4.63 Complete la inversión que se inició en el problema 24.39.
24.64 Efectúe la misma inversión empleando una TRF.
www.elsolucionario.org
Algebra no lineal
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1.
Explicar con sus propias palabras el significado de raíz de una ecuación (Introducción).
APROXIMACIONES SUCESIVAS (método iterativo).
2. Explicar detalladamente en qué consiste el método de aproximaciones sucesivas y dar su
interpretación geométrica (Introducción, Problemas 25.1, 25.2).
3. Justificar matemáticamente la condición suficiente de convergencia para el método de
aproximaciones sucesivas y explique el proceso de delta cuadrada de Aitken para acelerar la
convergencia (Introducción, Problemas 25.3, a 25.5, 25.7, 25.50).
4. Derivar a partir del método de aproximaciones sucesivas el método de Steffensen (Problema 25.6).
5. Desarrollar el algoritmo del método de aproximaciones sucesivas (Introducción, Problema 25.1).
6. Programar y compilar en algún superlenguaje (Pascal, Logo, Basic, Fortran, etc.) el algoritmo del
método de aproximaciones sucesivas (Introducción).
7. Encontrar una raíz de una ecuación utilizando el método de aproximaciones sucesivas, por
procedimiento manual o ejecutando un programa computacional (Introducción, Problemas 25.1 a
25.7, 25.49 a 25.51, 25.67. 25.78, 25.79, 25.90, 25.94,25.95).
BISECCIONES SUCESIVAS
8. Explicar detalladamente en qué consiste él método de bisecciones sucesivas y dar su interpretación
geométrica (Introducción).
9. Justificar matemáticamente la condición suficiente de convergencia para el método de bisecciones
sucesivas (Introducción).
10. Desarrollar el algoritmo del método de bisecciones sucesivas (Introducción).
11. Programar y compilar en algún superlenguaje (Pascal, Logo, Basic, Fortran, etc.) el algoritmo de!
método de bisecciones sucesivas (Introducción).
12.
Encontrar una raíz de una ecuación utilizando el método de bisecciones sucesivas, por
procedimiento manual o ejecutando un programa computacional (Introducción).
REGULA FALSI, FALSA POSICIÓN, SECANTE, INTERPOLACIÓN LINEAL INVERSA, CUERDAS.
13. Explicar detalladamente en qué consiste el método regula falsi y dar su interpretación geométrica
(Introducción, Problema 25.16).
14. Justificar matemáticamente la condición suficiente de convergencia para el método regula falsi,
asimismo, explique con sus propias palabras por qué algunos autores no consideran que el método
regula falsi es lo mismo que el de la secante (Introducción, Problema 25.18, 25.58, 25.59).
www.elsolucionario.org
476
MÉTODOS NUMÉRICOS
16. Programar y compilar en algún superienguaje (Pascal, Logo, Basic, Fortran, etc.) el algoritmo del
método regula falsi (Introducción).
17. Encontrar una raíz de una ecuación utilizando el método regula falsi, por procedimiento manual o
ejecutando un programa computacional (Introducción, Problemas 25.17, 25.49, 25.57 a 25.59).
NEWTON-RAPHSON
18. Explicar detalladamente en qué consiste el método de Newton-Raphson y dar su interpretación
geométrica (Introducción, Problemas 25.8, 25.9).
19. Justificar matemáticamente la condición suficiente de convergencia para el método de
Newton-Raphson (Introducción, Problema 25.11).
20. Desarrollar el algoritmo del método de Newton-Raphson (Introducción, Problemas 25.8, 25.9).
21. Programar y compilar en algún superienguaje (Pascal, Logo, Basic, Fortran, etc.) el algoritmo del
método de Newton-Raphson (Introducción).
22. Encontrar una raíz de una ecuación utilizando el método de Newton-Raphson, por procedimiento
manual o ejecutando un programa computacional (Introducción , Problemas 25.10, 25.12 a 25.15,
25.37, 25.52 a 25.56, 25.65, 25.66, 25.79, 25.87).
BAILEY
23. Explicar detalladamente en qué consiste el método de Bailey y dar su interpretación geométrica
(Introducción, Problemas 25.8, 25.9).
24. Justificar matemáticamente la condición suficiente de convergencia para el método de Bailey
(Introducción, Problema 25.11).
25. Desarrollar el algoritmo del método de Bailey (Introducción, Problemas 25.8, 25.9).
26. Programar y compilar en algún superienguaje (Pascal, Logo, Basic, Fortran, etc.) el algoritmo del
método de Bailey (Introducción).
27. Encontrar una raíz de una ecuación utilizando el método de Bailey, por procedimiento manual o
ejecutando un programa computacional (Introducción, Problemas 25.10, 25.12 a 25.15, 25.37, 25.52
a 25.56, 25.65, 25.66, 25.79, 25.87).
CEROS DE POLINOMIOS
28. Aplicar el teorema fundamental del álgebra a un polinomio (Introducción, Capítulo 2).
29. Aplicar el teorema de la factorización a un polinomio y efectuar su demostración (Introducción,
Capítulo 2).
30. Demostrar y aplicar el teorema del residuo a un polinomio (Introducción, Capitulo 2).
31. Evaluar un polinomio y su derivada en un punto, utilizando división sintética o método de Horner
(Introducción, Capitulo 2).
BERNOULLI
32. Demostrar que un polinomio de grado n, tiene sólo un cero dominante y que se puede encontrar
calculando una secuencia de solución para una ecuación de diferencias de orden n; este es el
método de Bernoulli (Introducción, Problema 25.19).
33. Aplicar el método de Bernoulli a un polinomio determinado con raíces reales (Introducción, Problemas
25.20, 25.22, 25.60, 25.61).
34. Aplicar el método de Bernoulli a un polinomio determinado con raíces dominantes complejas
conjugadas (Introducción, Problemas 25.21, 25.62, 25.80).
www.elsolucionario.org
ÁLGEBRA NO LINEAL
477
REDUCCIÓN DEL GRADO (deflación)
35. Aplicar ta división sintética a un polinomio, para conocer el procedimiento y mostrar la reducción del
grado (Introducción, Problema 25.23,25.72).
36. Demostrar que si no se conoce la raíz dominante de un polinomio, se puede encontrar la siguiente
raíz menos precisa, aplicando la reducción del grado (Introducción, Problema 25.24).
ALGORITMO DE DIFERENCIA DE COCIENTES
37. Explicar detalladamente y con sus propias palabras, en qué consiste el esquema de diferencia de
cocientes (Introducción, Problema 25.25).
38. Calcular el esquema de diferencia de cocientes para un polinomio (Introducción, Problema 25.26,
25.63).
39. Explicar detalladamente y con sus propias palabras, en qué consiste el teorema de convergencia
relacionado con el esquema de diferencia de cocientes (Introducción, Problema 25.27).
40. Aplicar el esquema de diferencia de cocientes, para obtener un par de raices complejas conjugadas
(Introducción, Problemas 25.28, 25.64, 25.80).
41. Explicar detalladamente y con sus propias palabras, en qué consiste el método de renglón por
renglón, para generar un esquema de diferencia de cocientes (Introducción, Problemas 25.29).
42. Aplicar el método de renglón por renglón a un polinomio, para generar un esquema de diferencia de
cocientes (Introducción, Problemas 25.29, 25.30, a 25.32).
BIRGE-VIETA
43. Explicar detalladamente en qué consiste el método de Birge-Vieta (Introducción).
44. Justificar matemáticamente la condición suficiente de convergencia para el método de Birge-Vieta
(Introducción).
45. Desarrollar el algoritmo del método de Birge-Vieta (Introducción).
46. Programar y compilar en algún superfenguaje (Pascal, Logo, Basic, Fortran, etc.) el algoritmo del
método de Birge-Vieta (Introducción).
47.
Dado el enunciado de un problema que involucre encontrar raíces de un polinomio, poder encontrar
todas las raíces de un polinomio utilizando el método de Birge-Vieta, por procedimiento manual o
ejecutando un programa computacional (Introducción, Problemas 25.75 a 25.77, 25.89 a 25.93).
SUCESIÓN (SECUENCIA) DE STURM
48. Definir con sus propias palabras en qué consiste una sucesión (secuencia) de Sturm (Introducción,
Problema 25.33).
49. Demostrar que el número de raíces de una función dentro de un intervalo, es la diferencia entre el
número de cambios de signo en una sucesión de Sturm (Introducción, Problema 25.34).
50. Aplicar el método de la sucesión de Sturm, para encontrar las raíces de un polinomio (Introducción,
Problemas 25.35, 25.36, 25.65, 25.66).
NEWTON PARA SISTEMAS DE ECUACIONES
51. Explicar detalladamente y con sus propias palabras, en qué consiste el método de Newton para
sistemas de ecuaciones y deducir sus fórmulas (Introducción, Problema 25.38).
52. Aplicar el método de Newton para sistemas de ecuaciones, en problemas reales, mediante un
procedimiento manual (Introducción, Problemas 25.39, 25.40, 25.67 a 25.69, 25.81).
www.elsolucionario.org
478
MÉTODOS NUMÉRICOS
OPTIMIZACIÓN Y MÉTODO DE DESCENSO MÁS RÁPIDO
53. Explicar detalladamente y con sus propias palabras, en qué consiste el algoritmo de descenso más
rápido y el concepto de gradiente (Introducción, Problema 25.41).
54. Aplicar el método de descenso más rápido, en problemas prácticos, mediante un procedimiento
manual (Introducción, Problemas 25.42 a 25.44, 25.70, 25.71).
LIN-BAIRSTOW
55. Explicar detalladamente en qué consiste el método de Lin-Bairstow (Introducción, Problemas 25.45 a
25.47).
56. Justificar matemáticamente la condición suficiente de convergencia para el método de Lin-Bairstow
(Introducción, Problema 25.47).
57. Desarrollar el algoritmo del método de Lin-Bairstow (Introducción, Problema 25.47).
58. Programar y compilar en algún superlenguaje (Pascal, Logo, Basic, Fortran, etc.) el algoritmo del
método de Lin-Bairstow (Introducción).
59. Dado el enunciado de un problema que involucre encontrar raíces de un polinomio, poder encontrar
todas las raíces de un polinomio utilizando el método de Lin-Bairstow, por procedimiento manual
o ejecutando un programa computacional (Introducción, Problemas 25.48, 25.73, 25.74, 25.75 a
25.77, 25.82, 25.89 a 25.93).
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Métodos numéricos
Polinomios
Manejo de funciones continuas
Polinomios osculadores
El polinomio de Taylor
Diferenciación numérica
Integración numérica
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas
Manejo de funciones discretas
Diferencias divididas finitas
Polinomios factoriales
El polinomio de Newton
Aproximación polinomial mediante interpolación
Operadores y polinomios de colocación
Puntos no equidistantes
Interpolación por segmentos (splines)
Interpolación
Operación de polinomios
Diferenciación numérica .
Integración numérica
www.elsolucionario.org
1
2
10
11
13
14
21
22
23
24
3
4
6
7
8
9
12
13
14
ÁLGEBRA NO LINEAL
479
Integración gaussiana
Integrales simples con puntos de singularidad
,
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial minimax
Aproximación polinomial por funciones racionales
Aproximación polinomial por funciones trigonométricas
Manejo de ecuaciones
Ecuaciones en diferencias
Ecuaciones diferenciales
Sistemas de ecuaciones diferenciales
Álgebra no lineal y optimizadón
Raíces de ecuaciones
Ceros de polinomios
Método de descenso más rápido (gradiente)
15
16
21
22
23
24
www.elsolucionario.org
18
19
20
25
25
25
480
MÉTODOS NUMÉRICOS
RAICES DE ECUACIONES
En este capítulo se trata el antiguo problema de encontrar raíces de ecuaciones o de sistemas de ecuaciones. La
larga lista de métodos disponibles es un reflejo de la larga historia de este problema y de su continua importancia.
El método que debe usarse depende de si se necesitan todas las raíces de una ecuación particular o sólo unas
cuantas; de si las raíces son reales o complejas, simples o múltiples; de si se tiene lista una primera aproximación
o no; etcétera.
MÉTODO DE A P R O X I M A C I O N E S SUCESIVAS DE P U N T O FIJO:
Resuelve ecuaciones de la forma f(X) - X.
Si intentamos resolver F(X) - 0.
la podemos resolver como X + F(X) = X
y reducirla a f'(X) - X
Esta reducción es la forma iterativa para mejorar una aproximación inicial a la raíz. Si x - xO es una aproximación
inicial, x0 se sustituye en f(x) para obtener el primer valor de la iteración.
Llamemos a este nuevo valor de x 1 , entonces f(x0) = x1
luego se evalúa en x = x 1 , para obtener f(x1) = x2
la segunda aproximación. El proceso se f(x2) = x3
continúa de acuerdo con la fórmula recursiva, f(xk) = xk + 1
hasta llegar a una aproximación satisfactoria, o bien establecer que el proceso iterativo no converge a la raíz.
Geométricamente una raíz de la ecuación F(X) = 0, es una posición de X = alfa, para la cual, la línea y - X
intersecta a la curva y = f(X) y es por tanto una raíz de F(x) = 0.
El factor crítico en el comportamiento del método es la pendiente de la función f(x) en la vecindad de la inter­
sección.
FACTOR ASINTÓTICO DE CONVERGENCIA
Si |f'(X)| ≤ 1, el proceso convergerá a la raíz.
Si |f'(X)| ligeramente ≤ 1, convergerá muy lento
Si |f'(X)| > 1, el proceso no converge
Para resolver ecuaciones de segundo grado podemos
tabular y graficar, además de aplicar la fórmula general
www.elsolucionario.org
481
ÁLGEBRA NO UNEAL
Por fórmula general
- 1
11
10
0
1
4
4
-
2
3
1 - 4 - 5
0 - 2 - 2
4
-
4
0
-
5
1
4
5
4
10
CONVERGENCIA MONOTÓNICA
CONVERGENCIA ALTERNANTE
DIVERGENCIA MONOTÓNICA
DIVERGENCIA ALTERNANTE
www.elsolucionario.org
482
MÉTODOS NUMÉRICOS
A L G O R I T M O DEL MÉTODO DE A P R O X I M A C I O N E S SUCESIVAS
1. Darle valores iniciales X1, Σ, N, I = 0, donde N = límite de Iteraciones, / = contador de iteraciones, Σ = pre­
cisión, X1 = aproximación inicial. Definir la función f(X).
2.
Evaluar la función f(Xi) = Xx+1 / = / + 1.
3.
Preguntar si ya se cumplió el límite de iteraciones:
I - N ≤ 0 Ir al paso (4)
> 0 ir al paso (5).
4.
Preguntar por la convergencia
5.
Desplegar letrero "NO SE PUDO ENCONTRAR LA RAÍZ EN ITERACIONES" ir a FIN (7).
6. IMPRIMIR alfa, f(alfa), i = número de iteraciones requeridas
7. FIN.
1.
El método iterativo resuelve x = F(x) mediante la recurrencia
y converge a una raíz si |P(x)| ≤ L. ≤ 1. El error e„ - r - x„, donde r es la raíz exacta, tiene la propiedad
por lo que cada iteración reduce el error en un factor cercano a F'(r). Si F'(r) está cerca de 1, ésta es una
convergencia lenta.
2.
El proceso Δ2 puede acelerar la convergencia bajo ciertas circunstancias. Está constituido por la aproxi­
mación
que puede obtenerse de la propiedad del error dado antes.
MÉTODO DE BISECCIONES SUCESIVAS:
Condiciones iniciales:
a)
Definir el intervalo (X1 X2), inicializar el contador de iteraciones J = 0.
b) Tener una Σ definida y un límite de iteraciones = N.
Desarrollo del algoritmo:
1) Calcular f(Xm), donde Xm = (X1 + X2)/2, J = J + 1
2) Aplicar la prueba de convergencia
www.elsolucionario.org
ÁLGEBRA NO LINEAL
483
|X, + X2| ≤ Σ => Xm es la raíz, ir al paso (4)
> Σ => aún no se encuentra la raíz, ir al paso (3).
3) f(X1) f(Xm) ≤ 0 => el nuevo intervalo es (X1 Xm), X2 Xm
> 0 => el nuevo intervalo es (Xm X2), X,
Xm
Probar que no se haya excedido el límite de iteraciones:
Si J > N => No se encuentra la raíz en N iteraciones, imprimir este letrero e irse a (5) FIN.
J≤N=>lralpaso(1).
4) Cuando si se encontró la raíz:
5)
Significa que Xm es la raíz alfa y f(Xm) = 0. IMPRIMIR:
LA RAÍZ ES ALFA - Xm, LA FUNCIÓN f(ALFA) - f(ALFA) - f(Xm), ITERACIONES J.
FIN.
PRUEBAS DE CONVERGENCIA:
TOLERANCIA ABSOLUTA,
|Xi+1
para órdenes de magnitud conocidos.
- Xi| ≤ Σ
TOLERANCIA RELATIVA,
para órdenes de magnitud desconocidos
Se compara también
se considera a
la raíz alfa de
MÉTODO DE N E W T O N - R A P H S O N :
PASOS PARA DEDUCIR EL ALGORITMO: Se supone que xi es una estimación de la raíz real de f(x) - 0, la tan­
gente f(x) en el punto xi puede expresarse como un polinomio de Taylor de la forma: Y(x) = f(xi) + f(xi) (x - xi).
Donde (xi+1, .0) es la intersección de esta tangente con el eje x. Este punto se encuentra haciendo Y(x) = 0 y x =
xi+1, entonces:
www.elsolucionario.org
484
MÉTODOS NUMÉRICOS
CONVERGENCIA
CONVERGENCIA
FALLA DE CONVERGENCIA
ALGORITMO DEL MÉTODO DE MEWTON-RAPHSON:
Definir f(X), f, Σ - épsilon, N - Número de iteraciones,
C1 (número positivo muy grande).
1) Selecciones X1 / = /, D1 = C1.
2) Prevenir la división entre cero. Si |f(x) ≤ Σ vaya a (1 )|
If (x)I > Σ vaya a (3).
3) Evaluar la fórmula recursiva
4) Obtenga nueva delta Di + 1 = |Xi+1 - Xi,|
5) Compare convergencia Di + 1 - Σ > 0 vaya a (6)
Di+1 - E ≤ 0 vaya a (8).
6) Compara la secuencia Di+1 -Di > 0 divergente vaya a (10)
Di+1 - Di ≤ 0 vaya a (7).
7) Compare iteraciones / - N > 0 no converge, vaya a (10)
/ - N ≤ 0 / = / + 1, vaya a (2).
8) Compare la función f(xi) - Σ > 0 vaya a (6)
f(xi+1)-E ≤ 0 vaya a(9).
9)
IMPRIMIR LA RAÍZ ALFA - Xi+1, f(ALFA), /, Σ.
10)
FIN.Σ
3.
El método de Newton obtiene aproximaciones sucesivas
www.elsolucionario.org
ÁLGEBRA NO LINEAL
485
a una raíz de f(x) - 0 y es sin duda un algoritmo muy popular. Si f(x) es complicada, puede ser preferible
el método iterativo anterior, pero el método de Newton converge mucho más rápido y suele conseguir la
raíz. El error en satisface aquí
Esto se conoce como convergencia cuadrática, con cada error aproximadamente proporcional al cua­
drado del error anterior. El número de dígitos correctos casi se duplica con cada iteración.
La iteración de la raíz cuadrada
es un caso especial del método de Newton, correspondiendo a f(x) = x2 - Q. Éste converge cuadráticamente a la raíz cuadrada positiva de Q, para Q > 0.
La fórmula más general de búsqueda de raíces
es también un caso especial del método de Newton. Produce una raíz p-ésima de Q.
MÉTODO REGULA FALSI (FALSA POSICIÓN = SECANTE = INTERPOLACIÓN
= LINEAL INVERSA = CUERDAS:
De acuerdo con este método que tiene tantos sinónimos, dependiendo del libro que se consulte, se aproxima f(X)
por un segmento de línea (cuerda), a través de los puntos [X1, f(X1)] y [X2, f(X2)], que corta al eje X en una Xx+1
www.elsolucionario.org
MÉTODOS NUMÉRICOS
486
El subintervalo (X1, Xi+1) o (Xi+1 X 2 )que contenga a la raíz, dependiendo del cambio de signo que reemplaza­
rá como un nuevo intervalo (X1 X2) y el proceso se repite. El proceso continúa hasta que se logre la convergencia.
Condiciones iniciales que garantizan al convergencia del método, también llamadas condiciones suficien­
tes o de Fourier.
1) Sea f(X) continua y con valores reales en el intervalo inicial (X1, X2).
2) f(X1) • f(X2) ≤ 0 garantiza cuando menos un cruce al eje X.
3) f(X1) • f'(X1) > 0 garantiza un mínimo o un máximo en un extremo.
4)
f '(X) ǂ 0, X1 ≤ X ≤ X2 no tiene punto de inflexión.
Estas condiciones son suficientes para garantizar la convergencia del método. Se asume que si la función f(X) las
satisface, la raíz es única en el intervalo seleccionado. Se emplea la semejanza de triángulos.
PASOS PARA REDUCIR EL ALGORITMO DE SECARTE, INTERPOLACIÓN LINEAL INVERSA,
REGULA FALSI, FALSA POSICIÓN, CUERDAS:
Si tenemos dos puntos de una recta definida por los extremos de la función; podemos escribir la ecuación de la
cuerda que pasa a través de ellos
FORMA INTEGRAL
FORMA GENERAL
Esta cuerda intersecta al eje x en el punto (xi + 1,0), entonces se obtiene la cuerda con los puntos nuevos [X3,
f(x3))
Se igualan las fórmulas
Se despeja para encontrar
Y llegamos a la fórmula recursiva
Prueba de convergencia
www.elsolucionario.org
ÁLGEBRA NO LINEAL
487
ALGORITMO DEL MÉTODO:
Definir la función f(x), x 1 , x2, Σ, N - número de iteraciones, 1-2.
Aplicar las condiciones suficientes o de Fourier.
1)
Evaluar x i + 1 y D .
2) Aplicar prueba de convergencia D - Σ ≤ 0 Vaya al paso (4)
D - E > 0 vaya al paso (3).
3)
Prueba del límite de iteraciones: / - N ≤ 0 / = / + 1 vaya a (1)
l - N > 0 vaya al paso (5).
4)
Ya se encontró la raíz, IMPRIMIR alfa = xi + 1, f(alfa), /, Σ. Vaya a (6).
5)
IMPRIMIR "NO CONVERGE EN N ITERACIONES". Vaya a (6).
6)
FIN.
4.
Los métodos de interpolación utilizan dos o más aproximaciones, usualmente algunos demasiado pe­
queños y otros demasiado grandes, para obtener aproximaciones mejoradas a una raíz por medio de la
utilización de polinomios de colocación. El más antiguo de ellos se basa en la interpolación lineal entre
dos aproximaciones previas. Se denomina regula falsi y resuelve f(x) = 0 mediante la iteración.
La rapidez de convergencia está entre aquellas de los dos métodos previos. Un método basado en la interpolación
cuadrática entre tres aproximaciones previas x0, x1, x2 emplea la fórmula
brindándose las expresiones para A, B, C en el problema 25.18.
MÉTODO DE BAYLEY:
Suponga que se da una aproximación inicial xi estimada de una raíz real de la ecuación f(x) - 0.
La ecuación de la parábola que toca a f(x) en x - xi, puede expresarse como un polinomio de Taylor cuadrático:
Y(x) =f(xi) +f(xi) (x - xi) + 1/2f'(xí) (x - xi)2
Se dice que una parábola Y(x) = Ax2 + Bx + C toca a a f(x) en xi, si se satisfacen las siguientes condiciones:
1) Y(xi) = f(xi). 2) Y'(xi) = f(xi), 3) Y"(xi) = f(xi)
Dada una estimación inicial x0, este método iterativo calcula una secuencia x 1 , x2, x3
una raíz ALFA.
www.elsolucionario.org
de aproximaciones a
MÉTODOS NUMÉRICOS
488
Aproximando f(x) por medio de una parábola que toca a f(x) y determinando la intersección (x/+1, 0) de esta
parábola con el eje x.
Para calcular este punto de intersección, igualamos Y(x) = 0 y x = xi + 1 => 0 = f(xi) + f(xi) (xi+1 - xi) + 1/2
f"(xi)(xi+1-xi)2
Se obtiene el coeficiente (xi+1 -xi) por el método de NEWTON.
CONVERGENCIA: |xi+1 - x / | ≤ Σ y f(ALFA) ≤ Σ.
El algoritmo del método de Bailey es similar al de Newton-Raphson: lo único que va a cambiar es la fórmula de recurrencia del paso (3), además de probar que el divisor no se haga cero en la fórmula recursiva.
5.
El método de Bernoulli produce la raíz dominante de una ecuación polinomial real'
aoxn + alxn-1 + • • • + an = 0
siempre que exista una raíz dominante simple, calculando una sucesión de solución de la ecuación en di­
ferencias
a0Xk + a1xk + • • • + anxk-1 = 0
y tomando lím (Xk+1/Xk). Los valores iniciales x-n+1 = • • • = x-1 = 0, x0 = 1 se utilizan a menudo. Si es domi­
nante un par de raices complejas conjugadas, la sucesión de solución sigue calculándose, pero las fórmu­
las
sirven para determinar las raíces como r1 r2 = r(cos φ ± i sen φ).
www.elsolucionario.org
489
ÁLGEBRA NO LINEAL
6.
La deflación se refiere al proceso de eliminar una raíz conocida de una ecuación polinomial, conduciendo
a una nueva ecuación de menor grado. Acoplada con el método de Bernoulli, permite el descubrimiento
de las siguientes raíces dominantes una después de otra. En la práctica se observa que la deflación conti­
nuada determina las raíces más pequeñas con menor precisión. Sin embargo, empleando los resultados
obtenidos en cada paso como aproximaciones iniciales por el método de Newton se llega a menudo al
cálculo preciso de todas las raíces.
7.
El algoritmo de cociente-diferencia extiende el método de Bernoulli y puede producir todas las raíces de
una ecuación polinomial, incluso pares complejos conjugados, en forma simultánea. Implica calcular una
tabla de cocientes y diferencias (asemejándose a una tabla de diferencias) a partir de la cual se deducen
las raíces. Los detalles son un poco complicados y pueden encontrarse en los problemas 25.25 al 25.32.
8.
Las sucesiones de Sturm ofrecen otro enfoque histórico a las raíces reales de una ecuación, produciéndo­
las también en este caso de manera más o menos simultánea. Una sucesión de Sturm
fo(x),f 1 (x), •••fn (x)
cumple las cinco condiciones que se listan en el problema 25.33. Estas condiciones aseguran que el nú­
mero real de ceros de f0(x) en el intervalo (a, b) es precisamente la diferencia entre el número de cambios
de signo en la sucesión f0(a), f,(a)
fn(a) y el número correspondiente en f0(b), f1(b),.... fn(b). Eligien­
do varios intervalos (a, b) los ceros reales pueden, por consiguiente, localizarse. Cuando f0(x) es un poli­
nomio, puede encontrarse una sucesión apropiada de Sturm empleando el algoritmo Euclidiano. Dejando
f1(x) = f0(x), el resto de la sucesión se define mediante
f(x)=f1(x)L1(x)-f2(x)
f1(x)=f2(x)L2(x)-f2(x)
fn-2(x)
=fn-1(x)Ln-1(x)
- fn(x)
Como los métodos de la deflación y del cociente-diferencia, las sucesiones de Sturm pueden emplearse
para obtener buenas aproximaciones iniciales para iteraciones de Newton, que producen entonces raíces
de gran precisión a gran rapidez.
SISTEMAS DE ECUACIONES Y PROBLEMAS DE OPTIMACIÓN:
Los sistemas de ecuaciones responden a generalizaciones de muchos métodos anteriores, así como a otros
algoritmos. Elegimos tres
1. El método iterativo, por ejemplo, resuelve el par de ecuaciones
x = F(x,y)
mediante las fórmulas
xn =
F(xn-1
y = G(x,y)
yn-1
yn = G(xn-1, yn-1)
suponiendo convergencia tanto de la sucesión xn como de la yn. El método de Newton resuelve
f(x,y) = 0
g(x,y) = 0
www.elsolucionario.org
490
MÉTODOS NUMÉRICOS
a través de las sucesiones definidas por
xn = Xn-1 +
con
hn-1
yn
=
yn-1
+ kn-1
determinadas por
De modo más general, el sistema
F(x) = 0
en el cual F, x y 0 son vectores de dimensión n, puede responder a la iteración
obtenida por medio de un reacomodo del sistema original, con un apropiado vector inicial x(0). O el enfo­
que de Newton puede expresarse en una compacta forma de vector-matriz empezando con la serie de
Taylor
ignorando los términos de mayor orden y haciendo el lado izquierdo igual al vector cero. El resultado es
un sistema lineal para h
que incluso puede escribirse
La matriz J se denomina el jacobiano de F y tiene los elementos
donde
son componentes de F y x. Con una aproximación inicial precisa, y una F cooperativa, el error
disminuye cuadráticamente en el sentido
pero debe señalarse que esta convergencia cuadrática puede ser evasiva. No siempre es fácil encontrar
primeras aproximaciones suficientemente precisas con sistemas de ecuaciones y las aproximaciones de
Newton algunas veces se desvían. En algunos casos se ha encontrado que el paso más corto
es mejor, con k elegida para asegurar que la norma de F disminuye.
www.elsolucionario.org
ALGEBRA NO LINEAL
491
En esta forma cada paso mejora la situación. El artificio ha sido llamado método de Newton para siste­
mas no lineales.
2. Los métodos de optimación se basan en la idea de que el sistema F = 0, o fi = 0 para i = 1 n, se re­
suelve siempre que la función
se minimiza, ya que el mínimo ocurre claramente cuando todas las fi, son cero. Se han desarrollado méto­
dos directos o métodos de descenso para buscar este mínimo. Por ejemplo, el problema en dos dimensio­
nes (con un cambio familiar de notación)
f(x,y) = 0
g(x,y) = 0
es equivalente a minimizar esta suma
Empezando en una aproximación inicial (x0, y0), seleccionamos la siguiente aproximación en la forma
x1 = x0 = tSx0 y1 = y0 - tSy0
donde Sx0 y Syo son los componentes del vector gradiente de S en (x0, yo). De tal modo se avanza en la di­
rección del descenso más escalonado y este procedimiento se conoce como el algoritmo del descenso
más rápido. El número t puede elegirse para minimizar S en esta dirección, aunque se han propuesto al­
ternativas. A continuación se siguen pasos similares. El método se utiliza a menudo para brindar aproxi­
maciones iniciales al método de Newton.
La equivalencia anterior, desde luego, se aprovecha a menudo en la forma opuesta. Para optimizar
una función
f(x1
xn), se buscan lugares donde el gradiente de f es cero.
Aquí f, denota la derivada parcial de f relativa a x1. La optimación se intenta entonces a través de la solu­
ción del sistema de n ecuaciones no lineales.
3.
Métodos para obtener CEROS DE POLINOMIOS produce raíces complejas de una ecuación polinomial
real p(x) = 0 aplicando el método de Newton a un sistema relacionado. Más específicamente, la división
de p(x) por un polinomio cuadrático sugiere la identidad
p(x) = (x2 -ux - v)q(x) + r(x)
donde r(x) es un residuo lineal
r(x) = bn-1(u, v)(x -u) + bn(u, v)
El divisor cuadrático será un factor de p(x) si podemos elegir u y v de manera que
bn-1(u, v) = 0
bn(u,
www.elsolucionario.org
u) = 0
492
MÉTODOS NUMÉRICOS
Éste es el sistema al cual se aplica ahora el método de Newton. Una vez que u y v se conocen, un par
complejo de raices puede encontrarse resolviendo
x2 — ux - v = 0
Recordemos del capítulo 2 el procedimiento que se sigue en la división sintética y algunos teoremas que
ahora nos serán de utilidad:
FACTORES DE UN POLINOMIO
DERIVADAS DE UN POLINOMIO
Este tema presenta dos métodos iterativos para la extracción de factores, de manera que se vayan obteniendo por
cálculos sucesivos todos los ceros de los polinomios de coeficientes reales.
PRIMER MÉTODO: Consiste en la extracción de los factores lineales (x - ∂) de un polinomio de grado n Pn(X); se
llama MÉTODO DE BIRGE-VIETA y es una combinación del proceso de DIVISIÓN SINTÉTICA para calcular
Pn(X,) y P'n(Xi) y del MÉTODO DE NÉWTON-RAPHSON, empleado para calcular la secuencia Xi-1 de aproximacio­
nes sucesivas a la raíz ∂.
Cuando esta sucesión converge a una raíz real ∂, se extrae el factor lineal correspondiente (x - ∂) mediante
división sintética.
El polinomio deflactado, o sea el de grado n-1 reemplazará al original; el proceso se repite hasta que se cal­
culen todos los ceros del polinomio original:
Pn-1(x) = Pn(x) I (x-∂).
SEGUNDO MÉTODO: Extracción e un factor cuadrático (X2 + rx + s) del polinomio Pn(x); este método se llama
LIN-BAIRSTOW y es una combinación del proceso de DIVISIÓN SINTÉTICA entre un término cuadrático y el mé­
todo de NEWTON para resolver un sistema de dos ecuaciones no lineales.
Cuando la sucesión de términos cuadráticos converge a un factor cuadrático, se extrae dicho factor y el poli­
nomio deflactado reemplazará al original. El proceso se repite hasta que se hayan calculado todos los factores
cuadráticos del polinomio original. El cálculo de los ceros del polinomio se hará mediante la fórmula general aplica­
da a cada factor cuadrático Pn-2(x) = Pn(x) / (X2 + rx + s).
MÉTODO DE BIRGE-VIETA:
Este método es un algoritmo directo para calcular las raíces reales de un polinomio; está basado en la expresión
en factores lineales del polinomio original, éstos serán N factores lineales (x - ∂¡), donde ∂¡ son las raices del poli­
nomio original Pn(x) - 0.
ALGORITMO DEL MÉTODO DE BIRGE-VIETA:
El método de BIRGE-VIETA calcula Pn(xi) y su derivada P'n(xi), mediante fórmulas recursivas y resuelve la ecua­
ción polinomial mediante NEWTON-RAPHSON fórmula recursiva:
www.elsolucionario.org
ÁLGEBRA NO LINEAL
493
Cuando una raíz ∂1 = xi+1 de Pn(x) = 0 se ha calculado, el polinomio original se reemplaza por el polinomio de grado
n-1, en donde Pn-1(x) = Pn(x) / (x-∂,).
El proceso continúa iterativamente hasta obtener todas las raíces.
Pn(x) = Xn + a1 Xn-1 + a2Xn-3 + a3X+ • • • + an-1 X + an = 0
X1 = -an / an-1 Se toma como aproximación inicial
XM = Xi - Pn(X) I Pn (X) Se toma como siguiente aproximación
Cuando |Xi+1 - Xi | < Σ, significa que se encontró la raíz.
EJEMPLO DEL MÉTODO DE BIRGE-VIETA:
Sea el polinomio P3(X) = X3 - 11X2 + 32X - 22 - 0
1ra iteración. Se obtiene la aproximación inicial
X0 = -(-22)/32 = .6875
Se calculan P(X<0) y PX0) mediante división sintética
1.0000
-11.0000
.6875
10.3125
.6875
-9.6250
+
1.0000
+
32.0000
-7.0898
24.9102
-6.6172
18.2930=
-22.0000
17.1258
- 4 . 8 7 4 2 = P 3 (.6875)
IXo = .6875
P 3 (.6$75)
Se calcula Xi+1 en este caso se calcula X1. X1 = X0 - P3(X0) / P'3(X0) X1 = .6875 - (-4.8742)118.293 => X1 = .9540,
además |Xi - X0| - .2665 > Σ
2da
iteración.
Se
toma
la
aproximación
calculada
X1
=
.9540
Se calculan P(X1) y P'(X1) mediante división sintética
1.0000
+
1.0000
+
-11.0000
.9540
-10.0460
.6875
-9.0920
32.0000
-9.5839
22.4161
-7.0898
13.7423 = P 3 ( . 9 5 4 0 )
-22.0000
21.3850
-.6150
IX 1
- .9540
= P 3 (.9540)
Se calcula Xi+1, en este caso se calcula X2. X2 = X1 = P3(X1) / P'3(X1) X2 = .9540 -(-.6150)/13.7423 => X2 = .9988,
además |X2 - X1| = .0448 > Σ
3* iteración. Se toma la aproximación calculada
X2 - .9988
Se calculan P(X2) y P'(X2) mediante división sintética
1.0000
+
1.0000
+
-11.0000
.9988
-10.0012
.9988
-9.0024
32.0000
-22.0000
-9.9892
21.9844
22.0108
-.0156
-8.9916
13.0192 = P 3 (.9988)
IX 2
= P 3 .9988)
www.elsolucionario.org
- .9988
494
MÉTODOS NUMÉRICOS
Se calcula Xi+1 en este caso se calcula X3. X3 = X2 - P3(X2) / P'3(X2) X3 = .9988 -(-.0156)/13.0192 => X3 = 1.0000,
además |X3 - X 2 | = .0012 > Σ
4ta iteración. Se toma la aproximación calculada
X 3 =1.0000
Se calculan P(X3) y P'(X3) mediante división sintética
1.0000
+
1.0000
+
-11.0000
1.0000
-10.0000
1.0000
-9.0000
32.0000
-22.0000
-10.0000
22.0000
22.0000 .0000 = P3(
-9.0000
13.0000 = P'3(1.0000)
IX3-
1.0000
1.0000)
Se calcula Xi+1 en este caso se calcula X4. X4 = X3 - P3(X3) / P3(X3) X4 = 1.0000 -(.0000)/13.0000 => X4 - 1.0000,
además |X4 - X3| = .0000 > Σ
Por lo tanto P3(1.0000) = .0000, lo que significa que es una raíz ∂1 = 1, dividiendo entre (X - 1) nos queda la ecua­
ción P2(X) = X2 - 10X + 22 = 0 el cual resuelto por la fórmula general nos da las siguientes raíces:
MÉTODO DE LIN-BAIRSTOW:
Antes de iniciar el desarrollo del método, veremos qué ocurre gráficamente cuando obtenemos las raíces de una
ecuación de segundo grado.
Se debe analizar el resultado del discriminante o radicando b2 - Aac, el cual puede darnos cuatro posibilidades:
1a b2 - Aac > 0 y sea cuadrado perfecto, => ∂1 ≠ ∂2, reales, racionales.
2o b2 - Aac > 0 y no sea cuadrado perfecto, => ∂1 ≠ ∂2, reales, irracionales.
3a b2 - 4ac = 0 => ∂1 = ∂2, reales, ∂ = -b/2a.
4a b2 - 4ac vAy => ∂1 ≠ ∂2, complejas.
RAÍCES REALES DIFERENTES
RAÍCES REALES IGUALES
RAÍCES COMPLEJAS
Procedimiento para calcular las raíces reales o complejas de un polinomio con coeficientes reales, ejemplos:
www.elsolucionario.org
495
ÁLGEBRA NO LINEAL
1o Grado par, con raíces complejas.
P4(X) = [X - (a1 + b1i)] [X - (a1 + b1i)] [X - (a2 + b 2 i ] [X - (a2 - b2i)]
2o Grado par, con raíces reales y complejas.
P4(X) = [X - ∂ 1 ] [X - ∂ 2 ] [ X - ( a + b i ] [ X - ( a - bi)]
3a Grado impar, con raíces reales y complejas.
P4(X) -[X-(a + bi] [X - (a - bi] [X - ∂1] [X - ∂ 2 ] [X - ∂3]
4a Grado impar, con raíces reales.
P4(X) = [ X - ∂1] [ x - ∂2] [ x - ∂3] [ x - ∂4] [ x - ∂5]
Resuelva por el método de Lin-Bairstow el siguiente polinomio.
Sea el polinomio P4(X) - X4 + 2X 3 -7X 2 + 8X + 12 = 0, con r= -3.05, s = 3.97 y tomando una tolerancia de
para |Δr| y |Δs|
1a iteración. Se calculan Δr y Δs mediante división y regla de Cramer.
1.0000
2.0000
3.05
1.0000
5.05
bn-3
3.05
1.0000
8.1
-pn-2
-7.0000
15.4
-3.97
4.43
bn_2
24.71
-2.97
25.17
-pn-1
8.0000
13.52
-20.05
1.47
bn-1
76.75
-32.16
46.06
-pn
12.0000
4.49
-17.59
-1.1
bn
13.05
13.97
13.05
|3.97
Se utiliza la regla de Cramer para resolver el sistema de ecuaciones.
Prueba de convergencia
D = (633.53) - (361.18) = 272.35
D = (37) + (8.91) = 45.91
Δr = Dl/D = 45.91/272.35 = .17
|.17| > Σ
D = (-27.69) - (65.55) = -93.23
Δs = D2/D = -93.23/272.35 = -.34
|-.34| > Σ
r = r + Δ r = - 3 . 0 5 + .17 = -2.88
s - s + Δs = 3.97 - .34 = 3.63
www.elsolucionario.org
496
MÉTODOS NUMÉRICOS
2a iteración. Se calculan Δr y Δs mediante división sintética y regla de Cramer, sustituyendo los nuevos valores de
r y s.
1.0000
+
+
1.0000
+
+
1.0000
2.0000
2.88
-7.0000
14.05
-3.63
4.88
3.42
bn-3 bn-2 bn-1 bn
2.88
22.35
-3.63
7.76
22.14
-Pn-2
-Pn-1
8.0000
9.86
-17.71
.15
12.0000
.42
-12.41
.01
63.76
-28.17
35.74
-Pn
| 2.88
| -3.63
| 2.88
| -3.63
R = bn-1 = .15 S = bn + rbn-1 = -5.58 = -.42
Se utiliza la regla de Cramer para resolver el sistema de ecuaciones.
Prueba de convergencia
D = 214
D1 = 3.24
Δr= Dl/D = 3.24/214 = .02
D2 = -5.12
Δs = D2/D = -5.12/214 = -.02
r = r + Δr = -2.88 + .02 - -2.86
s = s + Δs - 3.63 - .02 = 3.61
3a iteración. Se calculan Δr y Δs mediante división sintética y regla de Cramer, sustituyendo los nuevos valores de
r y s.
1.0000
1.0000
1.0000
2.0000
2.86
4.86
3.29
bn-3 bn-2 bn-1 bn
2.86
22.08
-3.61
7.72
21.76
-Pn-2
-Pn-l
-7.0000
13.95
-3.61
-.13
8.0000
9.41
-17.54
.26
12.0000
-.38
-11.88
62.23
-27.87
34.23
-P.
R=bn-1 = .13 S = bn + rbn-1 = .11
www.elsolucionario.org
| 2.86
| -3.61
| 2.86
1-3.61
ÁLGEBRA NO LINEAL
497
Se utiliza la regla de Cramer para resolver el sistema de ecuaciones.
D - 208.24
D1 = -.82
D2 = -1.19
Δr = Dl/D = -.82/208.24 = -.004
Δs = D2/D = -1.19/208.24 =-.01
Prueba de convergencia
|-.004| <Σ
|-.01| = Σ
r = r + Δr= -2.86 - .004 = -2.8645 = s + Δs = 3.61 = .01 = 3.6
Dado que ya cumplimos con la convergencia propuesta, extraemos de los resultados ios polinomios cuadráticos:
El primer polinomio se extrae del último resultado de la división sintética.
El segundo polinomio se forma con los factores que acabamos de obtener, r y s.
P4(X) = (X2 + 4.86X + 3.29)(X2 - 2.86X + 3.6) = X4 + 2X3 - 7.01X2 + 8.09X + 11.84
Cada polinomio se resuelve por la fórmula general, lo cual nos arroja los resultados siguientes:
∂1 = -.815, ∂2 = -4.045, ∂3 = 1.43 + 2.25i, ∂4 = 1.43 = 1.25i.
C O M P A R A C I Ó N DE LOS MÉTODOS P A R A OBTENER RAÍCES DE ECUACIONES:
BISECCIONES SUCESIVAS:
- Es un método muy didáctico
- Útil en cualquier ecuación
- Si las condiciones se cumplen, converge con seguridad (+, -)
- Algoritmo muy sencillo
- La precisión la fija el usuario, de acuerdo con sus necesidades
- Ocupa poca memoria
- Operaciones muy sencillas
- Poco error de redondeo
- Método lento
APROXIMACIONES SUCESIVAS O PUNTO FIJO:
- Algoritmo muy sencillo
- Método lento
- La transformación de la función original lo puede hacer más fácil.
- La evaluación final de la raíz, se hace tomando el último valor encontrado
- Sólo se requiere un valor inicial
- La gráfica de la función nos ayuda para encontrar rápido la raíz.
- Tiene rápida convergencia si es que ésta va a ocurrir
INTERPOLACIÓN LINEAL INVERSA NEWTON-RAPHSON
- Es bisecciones mejorado
- Convergencia rápida
- Algoritmo empieza a complicarse
- De fácil comprensión gráfica
www.elsolucionario.org
498
MÉTODOS NUMÉRICOS
- Requiere mayor conocimiento matemático
- Ocupa poca memoria
- Converge rápidamente
- Fórmula recursiva sencilla
- De fácil comprensión gráfica
- Algoritmo sofisticado
- Requiere mayor conocimiento matemático
- Ocupa poca memoria
BAILEY
- Convergencia rapidísima
- Algoritmo muy sofisticado
- Operaciones muy complicadas
- Mayor tiempo de CPU en cada iteración
- Ocupa poca memoria
Problemas resueltos
EL MÉTODO ITERATIVO
25.1
Pruebe que si r es una raíz de f(x) = 0 y si esta ecuación se reescribe en la forma x = F(x) de manera tal
que |P(x)| < L < 1 en un intervalo / centrado en x = r, entonces la sucesión xn = F(x-1) con x0 arbitrario pero
en el intervalo / tiene lím xn = r.
Primero encontramos
siempre que tanto x como y se encuentren cerca de r. En realidad es la condición de Lipschitz más que la
condición más restrictiva lo que necesitamos. Ahora
Fig. 25-1
Fig. 25-2
www.elsolucionario.org
ÁLGEBRA NO LINEAL
499
por lo que, puesto que L < 1, cada aproximación es al menos tan buena como su predecesora. Esto garanti­
za que todas nuestras aproximaciones están en el intervalo /, de modo que nada interrumpe el algoritmo.
Aplicando la última desigualdad n veces, tenemos
y puesto que L < 1, lím xn = r.
La convergencia se ilustra en la figura 25-1. Note que eligiendo F(xn-1) como la siguiente xn equivale a
seguir uno de los segmentos de recta horizontal hasta la recta y = x. Observe también que en la figura 25-2
el caso |F(x)| > 1 lleva a la divergencia.
25.2
En el año 1225 Leonardo de Pisa estudió la ecuación
f(x) = x3 + 2x2 + l0x-20 = 0
y obtuvo x = 1.368,808,107. Nadie sabe qué método utilizó Leonardo para encontrar este valor aunque fue
un resultado notable en ese tiempo. Aplique el método del problema 25.1 para obtener este resultado.
La ecuación puede ponerse en la forma x = F(x) de muchas maneras. Tomamos x = F(x) = 20/(x2 + 2x
+ 10) que sugiere la iteración
1
Al continuar la operación se produce la sucesión de la tabla
25.1. Efectivamente, en el paso 24 aparece el valor de Leonardo.
Tabla 25.1
1
2
3
4
5
6
7
8
9
10
11
12
25.3
1.538461538
1.295019157
1.401825309
1.354209390
1.375298092
1.365929788
1.370086003
1.368241023
1.369059812
1.368696397
1.368857688
1.368786102
13
14
15
16
17
18
19
20
21
22
23
24
1.368817874
1.368803773
1.368810031
1.368807254
1.368808486
1.368807940
1.368808181
1.368808075
1.368808122
1.368808101
1.368808110
1.368808107
¿Por qué es tan lenta la convergencia del algoritmo del problema anterior?
La rapidez de la convergencia puede estimarse a partir de la relación
www.elsolucionario.org
500
MÉTODOS NUMÉRICOS
que compara el error enésimo en con el error precedente. Cuando n aumenta podemos tomar P(r) como
una aproximación a P(ξ), suponiendo la existencia de su derivada. En ese caso en = F(r)en-1. En nuestro
ejemplo,
F'(r) =
40(r +1)
(r 2 + 2r + 10)2
-.44
haciendo a cada error aproximadamente -.44 veces el anterior a él. Esto indica que se requerirán dos o
tres iteraciones para cada nuevo lugar decimal correcto, y esto es lo que en realidad ha alcanzado el algo­
ritmo.
25.4
Aplique la idea de la extrapolación al limite para acelerar el algoritmo anterior.
Esta idea puede utilizarse siempre que se cuente con información acerca del error en un algoritmo.
Aquí tenemos la aproximación en = F(r)en-1. Sin conocer F'(r) incluso es posible escribir
Dividiendo encontramos
y resolviendo para la raiz
Lo anterior a menudo se denomina el prodjfeo Δ2 de Aitken.
25.5 Aplique la extrapolación al limite en el cálculo del problema 25.2.
Empleando x10, x11 y x12 la fórmula produce
1.368786102
(.000071586)2
-.000232877
1.368808107
que es otra vez el valor de Leonardo. Con esta extrapolación, sólo la mitad de las iteraciones son necesa­
rias. Si se hubiera utilizado antes podría haber producido incluso mayor economía estimulando la conver­
gencia.
25.6
El empleo de la extrapolación al límite en forma sistemática después de cada tres iteraciones se conoce
como el método de Steffensen. Aplíquelo a la ecuación de Leonardo.
Las primeras tres aproximaciones x0. x1 y x2 pueden borrarse del problema 25.2. La fórmula de Aitken
se emplea después de esto para producir x3:
x3=x2
(x2-x1)2
x2 — 2x1 + X 0
1.370813882
La iteración original se resume luego como en el problema 25.2 para producir x4 y x5:
x4 = F ( x 3 ) = 1.367918090
x5 = F(x 4 ) = 1.369203162
www.elsolucionario.org
ÁLGEBRA NO LINEAL
501
La fórmula de Aitken proporciona entonces el valor de x6:
(x5 - x4)2
x5 - 2x4 + x 3
1.368808169
El siguiente ciclo origina las iteraciones
x7 = 1.368808080
x8
= 1.368808120
de las cuales la fórmula de Aitken logra x9 = 1.368808108.
25.7
Muestre qué otros reacomodos de la ecuación de Leonardo no pueden producir sucesiones convergentes.
Como un ejemplo tomamos x = (20 - 2x2 - x3)/ 10 que sugiere la iteración
Iniciando otra vez con x0 = 1, llegamos a la sucesión
x1 = 1.70
x3
x2=
x4=
.93
= 1.75
x5 = 1.79
x7
= 1.83
.85
x 6 = .79
x8=
.72
y así sucesivamente. Parece claro que las aproximaciones se alternan y se orientan en direcciones opues­
tas. Comparando con el problema 25.1, encontramos que en este caso F'(r) = (-4r - 3r2)/10 < - 1 , lo que
confirma la evidencia computacional.
EL MÉTODO DE N E W T O N
25.8
Deduzca la fórmula iterativa de Newton
para resolver t(r) - 0.
Empezando con la fórmula de Taylor
retenemos la parte lineal, recordando que f{r) - 0, y definimos
tener
poniéndola en lugar del residuo para ob­
que se reacomoda de inmediato en
25.9
¿Cuál es la interpretación geométrica de la fórmula de Newton?
Equivale a utilizar la recta tangente a y - f(x) en xn-1 en lugar de la curva. En la figura 25-3 puede ver­
se que conduce a
www.elsolucionario.org
502
MÉTODOS NUMÉRICOS
Fig. 25-3
que es otra vez la fórmula de Newton. Continúan pasos similares, como indica la flecha.
25.10 Aplique la fórmula de Newton a la ecuación de Leonardo.
Con f(x) = x3 + 2x2 + 10x - 20 encontramos f(x) = 3x2 + 4x + 10, y la fórmula iterativa se vuelve
x 3 n-1 + 2x 2 n-1 + 1 0 x n - 1 - 2 0
3X 2 N-1 + 4X N-1 + 10
eligiendo una vez más
, obtenemos los resultados de la tabla 25.2
Tabla 25.2
1
2
3
4
1.411764706
1.369336471
1.368808189
1.368808108
La rapidez de la convergencia es notable. En cuatro iteraciones tenemos esencialmente el valor de
Leonardo. En efecto, el cálculo muestra que
f(1.368808107)
= -.000000016
f(1.368808108)
= -.000000005
que indica que el resultado de Newton es el ganador por una nariz.
25.11 Explique la rápida convergencia de la iteración de Newton mostrando que la convergencia es "cuadrática".
Recordando las ecuaciones del problema 25.8 que llevan a la fórmula de Newton,
sustraemos para obtener
o, dejando en = r - xn,
www.elsolucionario.org
ÁLGEBRA NO LINEAL
503
Suponiendo convergencia, sustituimos tanto xn-1 como ξ por la raíz r y tenemos
Cada error es aproximadamente proporcional al cuadrado del error anterior. Esto significa que el número de
lugares decimales correctos casi se duplica con cada aproximación y es lo que se denomina convergencia
cuadrática. Ésta puede compararse con la más lenta convergencia lineal en el problema 25.3, donde cada
error fue aproximadamente proporcional al error anterior. Puesto que el error de nuestra presente x3 es alre­
dedor de .00000008, y [f"(r)]l[2f(r)] es aproximadamente .3, vemos que si hubiéramos sido capaces de lle­
var más lugares decimales en nuestro cálculo, ¡el error x4 podría haber sido de alrededor de dos unidades
en el lugar quince! Esta magnífica rapidez indica que el algoritmo de Newton merece una primera aproxi­
mación de precisión razonable para dispararlo, y que este papel natural es la conversión de dicha apro­
ximación razonable en una excelente. En efecto, otros algoritmos que se presentarán son más apropiados
que el de Newton para el problema "global" de obtener primeras aproximaciones para todas las raíces. Sin
embargo, tales métodos convergen muchas veces con suma lentitud y parece natural sólo utilizarlos como
una fuente de primeras aproximaciones razonables, brindando de ese modo el método de Newton el refina­
miento. Tales procedimientos son muy populares y se mencionarán de nuevo cuando avancemos. Debe
notarse también que algunas veces, dada una inadecuada primera aproximación, el algoritmo de Newton
convergerá con rapidez cuadrática, ¡pero no hacia la raíz esperada! Si recordamos la geometría de la recta
tangente detrás del algoritmo, es fácil diagramar una curva para la cual esto suceda, poniendo simplemente
la primera aproximación cercana a un punto máximo o mínimo.
25.12 Muestre que la fórmula para determinar raíces cuadradas,
Con f(x) = x2 - Q, es claro que hacer f(x) = 0 equivale a encontrar una raíz cuadrada de Q. Puesto que
f'(x) = 2x, la fórmula de Newton se vuelve
25.13 Aplique la iteración de la raíz cuadrada con Q = 2.
Eligiendo x0 = 1, encontramos los resultados de la tabla 25.3. Note de nuevo la naturaleza cuadrática
de la convergencia. Cada resultado tiene aproximadamente el doble de dígitos correctos que el anterior. La
figura 25-4 ilustra el efecto. Puesto que la primera aproximación no estuvo en el lado cóncavo de y = x2 - 2,
la siguiente está en el otro lado de la raíz. Después de esto la sucesión es monótona, permaneciendo en el
lado convexo de la curva como suelen hacerlo las líneas tangentes.
25.14 Obtenga la iteración
para determinar la raíz n-ésima de Q.
Con f(x) = xp - Q y f'(x) = pxp-1 el resultado es de inmediato un caso especial del método de Newton.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
504
Tabla 25.3
1
2
3
4
5
1.5
1.416 666 667
1.414 215 686
1.414213562
1.414213 562
Fig. 25-4
25.15 Aplique el problema precedente para encontrar una raíz cúbica de 2.
Con Q = 2 y p = 3, la iteración se simplifica
Eligiendo x0 = 1, encontramos
x2= 1.263888889
x3=
y por consiguiente
1.259933493
x4= 1.259921049
x5= 1.259921049
La convergencia cuadrática es sobresaliente.
MÉTODOS DE INTERPOLACIÓN
25.16 Este antiguo método utiliza dos aproximaciones previas y construye la siguiente haciendo una interpolación
lineal entre ellas. Deduzca la regula falsi (véase la figura 25-5),
c =a La función lineal
(a-b)f(a)
f(a)-f(b)
f(a)-f(b)
y=f(a)+
a-b
(x-a)
claramente tiene y = (x) en a y b. Se anula en el argumento c dado en la regula falsi. Este cero sirve como
nuestra siguiente aproximación a la raíz de f(x) =0, así que efectivamente hemos reemplazado la curva y =
www.elsolucionario.org
ÁLGEBRA NO LINEAL
505
f(x) por un polinomio de colocación lineal en la vecindad de la raíz. Se observará también en la figura 25-5
que las dos aproximaciones dadas a y b están en lados opuestos de la raíz exacta. De tal modo f(a) y f(b)
tienen signos opuestos. Esta oposición de signos se supone cuando se utiliza la regula falsi. En consecuen­
cia, habiendo encontrado c, para volver a aplicar la regula falsi empleamos esta c ya sea como la nueva a o
la nueva b, preservando cualquier elección, la oposición de signos. En la figura 25-5, c vendría a ser la nue­
va a. En esta forma una sucesión de aproximaciones x0, x1 x 2 , . . . puede generarse, siendo x0 y x 1 las a y o
originales.
Fig. 25-5
25.17 Aplique la regula falsi a la ecuación de Leonardo.
Eligiendo x0 = 1 y x, = .5, la fórmula produce
x 2 = 1.5
.5(2.875)
9.875
1.35
x3= 1-35
(-.15)(-.3946)
-3.2696
1.368
y así sucesivamente. Es posible mostrar que la rapidez de convergencia será mejor que la del problema
25.2, pero no tan buena como la del método de Newton.
25.18 Un siguiente paso natural es emplear un polinomio de interpolación cuadrática en lugar de uno lineal.
Suponiendo que se disponen tres aproximaciones x0, x 1 x 2 , deduzca una fórmula para una nueva
aproximación x3 que es una raíz de tal polinomio cuadrático.
No es difícil verificar que el polinomio cuadrático a través de los tres puntos (x0, y0), (x1, y 1 )(x 2 , y2),
donde y =f(x), puede escribirse como
donde h= x-x2 y A,B, C, son
(x1 - x0)y2 + (x0 - x2)y1 + (x2 - x1)y0
(x2-xl)(xl-xθ)2
(x1 - x0)(2x2 -x1- x0)y2 - (x2 - x0)2y1 + (x2 - x1)2y0
B=
(x2-xl)(xl-x0)2
x — x0
c= 2
y
x1-x0 2
A=
www.elsolucionario.org
506
MÉTODOS NUMÉRICOS
Resolviendo p(x) = 0 para h encontramos
eligiéndose esta forma de la fórmula cuadrática para evitar la pérdida de dígitos significativos durante la
sustracción. Aquí debe elegirse el signo que haga el denominador más grande en valor absoluto. En tal
caso
x3 = x2 + h
se convierte en la siguiente aproximación y el proceso puede repetirse avanzando todos los subíndices una
unidad.
El método que acaba de describirse se conoce como método de Muller y se ha encontrado que converge tanto hacia raices reales como complejas. Para lo último es necesario, desde luego, correr el algoritmo en aritmética compleja, pero incluso con raíces reales, la aritmética compleja es la elección más sensata puesto que ocasionalmente aparecen trazas de partes imaginarias.
MÉTODO DE BERNOULLI
25.19 Pruebe que si el polinomio de grado n
p(x) = a 0 x n + a 1 x n-1l + • • • + an
tiene un solo cero dominante, digamos r1 puede determinarse entonces calculando una sucesión de solu­
ción para la ecuación en diferencias de orden n
a0xk + a1xk-1 + • • • + anxk-n = 0
y tomando el lím (xk+1 , /xk).
Esta ecuación en diferencias tiene p(x) = 0 como su ecuación característica y su solución puede, en
consecuencia, escribirse como
xk = c1rk1+c2rk2+• • • + cnrkn
Si elegimos valores iniciales para que c ≠ 0, entonces
y puesto que r1, es la raíz dominante,
haciendo el lim (Xk+1/Xk) ?= r como se pedía. Puede mostrarse empleando la teoría de la variable compleja
que los valores iniciales x-n+1 = • • • x-1 = 0, x0 = 1 garantizarán c1 ≠ 0.
www.elsolucionario.org
ÁLGEBRA NO LINEAL
507
25.20 Aplique el método de Bemoulli a la ecuación x4 - Sx3 + 9x2 - 7x + 2 - 0.
La ecuación en diferencias asociada es
xk - 5xk-1 + 9xk-2 - 7xk-3 + 2xk-4 = 0
y si tomamos los valores iniciales x-3 = x-2 = x-1 = 0 y x0 = 1, entonces las xk subsiguientes se dan en la tabla
25.4. La razón xk+1,/xk se incluye también en la tabla. La convergencia a r = 2 es lenta, siendo lineal la rapi­
dez de convergencia del método de Bemoulli. Con frecuencia se utiliza el método para generar una buena
aproximación inicial para la iteración de Newton o Steffensen, que son ambas cuadráticas.
Tabla 25.4
1
2
3
4
5
6
7
8
5
16
42
99
219
466
968
1,981
3.2000
2.6250
2.3571
2.2121
2.1279
2.0773
2.0465
2.0278
9
10
11
12
13
14
15
16
4,017
8,100
16,278
32,647
65,399
130,918
261,972
524,097
2.0164
2.0096
2.0056
2.0032
2.0018
2.0010
2.0006
25.21 Modifique el método de Bernoulli para el caso en el que son dominantes un par de raíces complejas con­
jugadas.
Sean r1 y r2 raíces complejas conjugadas. Entonces |ri| < |r1| para i = 3
n, ya que el par r1 r2 es
dominante. Empleando valores iniciales reales, la solución de la ecuación en diferencias puede escribirse
como
donde c1 y c2 también son complejos conjugados. Sean r1 = re1 - T2 c1 = aei6 = c2 con r > 0, a > 0, y 0 < φ < π
de modo que r1 es la raíz en el medio plano superior. Entonces
Todos los términos excepto el primero tienen límite cero; y por ello para k grande, xk = 2ark cos (kφ + θ). Uti­
lizamos ahora este resultado para determinar r y φ. Primero observamos que
xk+1 - 2r cos φ xk + r2xk-1= 0
como puede verse sustituyendo para xk a partir de la ecuación anterior y empleando las identidades para
www.elsolucionario.org
MÉTODOS NUMÉRICOS
508
cosenos de sumas y diferencias. Reduciendo los subíndices, tenemos también
xk — 2r cos φ xk-x + r2xk-2 = 0
Resolviendo después de esto las dos ecuaciones en forma simultánea,
Los ingredientes necesarios para determinar r1 y r2 están ahora disponibles.
25.22 Aplique el método de Bernoulli a la ecuación de Leonardo.
La ecuación en diferencias asociada es xk = -2xk-1 - 10XK-2 + 20xk-3 y la sucesión de solución para los
valores x-2 = x-1 = 0, x0 = 1 aparecen en la tabla 25.5. Algunas aproximaciones a r2 y - 2r cos φ también se
presentan. Los signos fluctuantes ± son una indicación de que están presentes raíces complejas dominan­
tes. Esto puede verse recordando la forma de la xk como la que se dio en el problema 25.21, esto es, xk 2ark cos (k φ + θ). Cuando k aumenta, el valor del coseno variará entre ±1 en una forma algo irregular que
depende del valor de φ.
Tabla 25.5
1
2
3
4
5
6
-2
-6
52
-84
-472
2,824
7
8
9
10
11
12
-2,608
-32,464
147,488
-22,496
-2,079,168
7,333,056
14.6026
14.6076
14.6135
14.6110
14.6110
3.3642
3.3696
3.3692
3.3686
3.3688
A partir de las últimas aproximaciones encontramos
lo que produce el par de raíces dominantes r1,r2 = -1.6844 ± 3.4313i. Puesto que la ecuación de Leonardo
es cúbica, estas raices podrían determinarse empleando la raíz real encontrada antes para reducir a una
ecuación cuadrática. El método de Bernoulli no fue en realidad necesario en este caso. Los resultados en­
contrados pueden verificarse calculando la suma (-2) y el producto (20) de todas las raíces.
DEFLACIÓN
25.23 Emplee la ecuación simple x4 - 10x3 + 35x2 - 50x + 24 = 0 para ilustrar la idea de la deflación.
La raíz dominante de esta ecuación es exactamente 4. Aplicando el teorema del factor eliminamos el
www.elsolucionario.org
ÁLGEBRA NO LINEAL
509
factor x - 4 por división,
El cociente es el polinomio cúbico x3 - 6x2 + 11x - 6 y afirmamos que el polinomio cuarto original se ha reducido
a este polinomio cúbico. La raíz dominante del polinomio cúbico es exactamente 3. Eliminando este factor,
alcanzamos una segunda deflación, al polinomio cuadrático x2 - 3x + 2 que puede resolverse entonces para
las restantes raíces 2 y 1. O el polinomio cuadrático puede reducirse a la función lineal x - 1. La idea de la
deflación es que, habiendo encontrado una raíz, la ecuación original puede reemplazarse por una de menor
grado. En teoría, un método para determinar la raíz dominante de una ecuación, tal como el de Bernoulli,
podría utilizarse para encontrar todas las raíces una después de otra, mediante deflaciones sucesivas que
eliminan cada raíz dominante que se encuentra, y suponiendo que dos raíces cualesquiera no son de igual
tamaño. Hay en realidad problemas de error que limitan el uso de este procedimiento, como indica el si­
guiente problema.
25.24 Muestre que si se conoce con exactitud la raíz dominante, el método de deflación puede producir la
siguiente raíz con incluso menor precisión, y sugiera un procedimiento para obtener esta segunda raíz con
la misma precisión que la primera.
Suponga, por simplicidad, que la raíz dominante de la ecuación previa se ha encontrado correcta has­
ta sólo dos lugares y que su valor es 4.005. La deflación produce
1
1
-10
4.005
-5.995
35
-24.01
10.99
-50
44.015
-5.985
24
-23.97
.03
4.005
y la expresión cúbica x3 - 5.995x2 + 10.99x - 5.985. El cero dominante de esta expresión (correcta hasta
dos lugares) es 2.98. Con relación a la ecuación cuadrática original, esto es incorrecto en el último lugar. El
procedimiento natural en este punto es usar el 2.98 como la aproximación inicial en la iteración de Newton,
la cual produciría rápidamente una raíz de la ecuación original correcta hasta dos lugares. Luego podría
realizarse una segunda deflación. En la práctica, se encuentra que las "raíces" más pequeñas requieren
una corrección considerable y que para polinomios incluso de grado moderado el resultado obtenido por de­
flación puede no ser lo suficiente bueno para garantizar la convergencia de la iteración de Newton hacia la
raíz deseada. Se cumplen comentarios similares cuando se eliminan raíces conjugadas complejas a ± bi
por la división entre el factor cuadrático x2 - 2ax + a2 + b2.
EL ALGORITMO DEL COCIENTE-DIFERENCIA
25.25 ¿Cuál es el artificio del cociente-diferencia?
Dado un polinomio aoxn + a1xn-1 + • • • + an y la ecuación en diferencias asociada
aoxk + a1xk-1 + • • • + anxk-n = 0
www.elsolucionario.org
MÉTODOS NUMÉRICOS
510
considere la sucesión de solución para la cual x-n+1, = • • • = x-1 = 0 y x0 = 1. Si q1k = xk+1 /xk y d0k = 0. Defini­
mos entonces
donde
Estos diversos cocientes (q) y diferencias (d) pueden presentar­
se como en la tabla 25.6. Las definiciones se recuerdan con facilidad observando las partes con forma de
rombo en la tabla. En un rombo centrado en una columna (g) la suma del par SW es igual a la suma del par
NE. En un rombo centrado en una columna (d) los productos correspondientes son iguales. Éstas son las
reglas del rombo.
Tabla 25.7
Tabla 25.6
0
1 0
1.0000
1 1 0
1.0000
2.0000
2
2
0
3
3
0
-1.0000
-.5000
1.5000
-.5001
.1667
1.6667
4 . 5 0
8
-.0001
-.6669
-.0667
1.6000
5
-.0001
0
-.5997
.0250
1.6250
6 13
0
7 21
0
.0005
.0007
-.6240
-.0096
1.6154
-.0082
-.6226
.0037
1.6190
8 34 0
25.26 Aplique el artificio del cociente-diferencia al polinomio x2 - x -1 asociado con la sucesión de Fibonacci.
Los resultados aparecen en la tabla 25.7
25.27 ¿Cuál es el primer teorema de convergencia asociado con el artificio del cociente-diferencia?
Suponga que dos ceros del polinomio dado no tienen el mismo valor absoluto. En consecuencia
lím q j k = r j
para k tendiendo a infinito, donde
r1r2
j = 1, 2 , . . . , n
rnestán en el orden de valor absoluto decreciente. Para j = 1
www.elsolucionario.org
ÁLGEBRA NO LINEAL
511
éste es el resultado de Bernoulli para la raíz dominante. Para los demás valores de j la prueba requiere de
la teoría de funciones complejas y se omitirá. Se ha supuesto además aquí que ninguno de los denomina­
dores implicados en el artificio es cero. La convergencia de las q a las raíces implica la convergencia de las
d a cero. Esto puede verse del modo siguiente. Por la primera de las ecuaciones de definición del problema
25.25,
Por consiguiente, djk converge geométricamente a cero. El principio de esta convergencia, en el presente
problema, es ya evidente en la tabla 25.7, excepto en la última columna que se analizará en breve. En esta
tabla las columnas (q) deben, por el teorema de la convergencia, estar acercándose a las raíces
que son aproximadamente 1.61803 y -.61803. Es claro que estamos más cerca de la primera que de la se­
gunda.
25.28 ¿Cómo puede un artificio de cociente-diferencia producir un par de raíces complejas conjugadas?
La presencia de tales raíces puede indicarse mediante columnas (d) que no convergen a cero. Su­
ponga que la columna de las entradas djk tiene esta característica. Entonces formamos el polinomio
pj = x2 - Ajx + Bj
donde para k tendiendo a infinito,
El polinomio tendrá las raices rj y rj+1 que serán complejas conjugadas. Esencialmente, tendrá que haberse
encontrado un factor cuadrático del polinomio original. Aquí hemos supuesto que las columnas de las entra­
das dkj-1 y dkj+1 convergen a cero. Si no lo hacen, más de dos raíces tienen igual valor absoluto y se necesita
un procedimiento más complicado. Los detalles, así como las pruebas de los reclamos de convergencia que
acaban de hacerse, se brindan en el National Bureau of Standards Applied Mathematics Series, vol. 49.
25.29 ¿Cuál es el método de renglón por renglón para generar un artificio de cociente-diferencia y cuáles son sus
ventajas?
El método de columna por columna que se presentó primero en el problema 25.25 es muy sensible a
los errores de redondeo. Ésta es la explicación del hecho de que la columna final de la tabla 25.7 no está
convergiendo a cero como debe una columna (d), y en lugar de ello muestra un típico inicio de una explo­
sión del error. El siguiente método renglón por renglón es menos sensible al error. Se brindan entradas ficti­
cias para llenar los dos renglones superiores de un artificio de cociente-diferencia como sigue, empezando
con la columna d0k y terminando con dnk. Estas dos columnas frontera están compuestas de ceros para todos
los valores de k. Esto equivale a forzar el comportamiento apropiado de estas diferencias frontera en un es­
fuerzo por controlar efectos de los errores de redondeo.
Las reglas del rombo se aplican entonces, llenando cada nuevo renglón en su turno. Puede mostrarse que
el mismo esquema que se encontró en el problema 25.25 será desarrollado mediante este método, supo-
www.elsolucionario.org
MÉTODOS NUMÉRICOS
512
niendo que no hay errores en cualquier procedimiento. En la presencia de error el método de renglón por
renglón es más estable. Observe que en este método no es necesario calcular la xk.
25.30 Aplique el método de renglón por renglón al polinomio de la sucesión de Fibonacci, x2 - x - 1.
Los renglones superiores se llenan como se indicó en el problema anterior. Los otros se calculan me­
diante las reglas del rombo. La tabla 25.8 muestra los resultados. El comportamiento mejorado en la última
columna (q) es manifiesto.
Tabla 25.8
1
1 0
2
2
0
3
0
4
0
5
0
6
0
0
1
-1
-.5000
1.5000
1.6667
1.6000
1.6250
.1667
-.0667
.0250
-.0096
1.6154
7
0
8
0
1.6191
0
0
-.5000
-.6667
-.6000
-.6250
0
0
0
0
-.6154
.0037
-.6191
0
0
25.31 Aplique el algoritmo del cociente-diferencia para encontrar todas las raices de
x4 - 10x3 + 35x2 - 50x + 24 = 0
Las raíces de esta ecuación son exactamente 1, 2, 3 y 4. Sin embargo, este algoritmo no requiere in­
formación inicial acerca de las raíces, por lo que la ecuación sirve como un simple caso de prueba. El artifi­
cio del cociente-diferencia, generado por el método del problema 25.29, aparece como la tabla 25.9. Es cla­
ro que la convergencia es lenta, pero el patrón esperado está emergiendo. Las columnas (d) parecen
encabezadas por cero y las columnas (q) por 4, 3, 2, 1, en ese orden. Probablemente sería sensato cam­
biar en este punto al método de Newton, que con suma rapidez convierte a primeras aproximaciones razo­
nables tales como la que ahora tenemos, en resultados precisos. El algoritmo del cociente-diferencia se uti­
liza a menudo para este mismo propósito, para preparar la iteración de Newton.
25.32 Aplique el algoritmo del cociente-diferencia a la ecuación de Leonardo.
Utilizando otra vez el método de renglón por renglón, generamos el esquema que se presenta en la
tabla 25.10.
www.elsolucionario.org
ÁLGEBRA NO LINEAL
513
Tabla 25.9
10
1
0
0
-3.5000
6.5000
2
0
2.0714
-1.1154
5.3846
3
0
0
0
6
0
0
0
-.0198
-.0521
0
.9786
-.0104
1.9093
-.0342
2.9260
0
.9588
1.8676
2.9062
-.0540
4.1415
-.0373
-.0803
-.0780
0
.9215
1.8071
2.8803
4.1955
8
-.0695
-.1264
-.1158
0
.8520
1.7180
2.8448
4.2735
7
-.1291
-.2054
-.1786
0
.7229
1.5821
2.7926
4.3893
-.2429
-.3513
-.2921
0
.4800
1.3599
2.7059
4.5679
5
-.6542
-.5246
0
-.4800
.9486
2.5326
4.8600
4
0
-1.4286
0
.9890
-.0054
1.9381
0
.9944
Siendo lenta la convergencia, suponga que nos detenemos aquí. La segunda columna (d) parece que
difícilmente está encabezada por cero, lo que indica que r1 y r2 son complejas, como de cualquier manera
ya sabíamos. La siguiente columna (d) parece tender a cero, lo que indica una raíz real que sabemos se
acerca a 1.369. El método de Newton produciría rápidamente una raíz exacta a partir de la estimación ini­
cial de 1.3642 que ahora tenemos aquí. Regresando al par complejo, aplicamos el procedimiento del pro­
blema 25.28. De las primeras dos columnas (q) calculamos
5.6192-9.0116 = - 3 . 3 9 2 4
( - 1 . 6 1 5 4 X - 9 . 0 1 1 6 ) = 14.5573
- 5 . 9 8 3 0 + 2.6091 = -3.3739
(5.6192)(2.6091) = 14.6611
-.9234-2.4408 =-3.3642
( - 5 . 9 8 3 0 X - 2 . 4 4 0 8 ) = 14.6033
de manera que A1 = -3.3642 y B1= 14.6033. En consecuencia, las raíces complejas están dadas aproxima­
damente por x2 + 3.3642x + 14.6033 - 0 que las hace r 1 r 2 = -1.682 ± 3.431/.
El método de Newton que emplea aritmética compleja podría utilizarse para mejorar estos valores, pe­
ro un procedimiento alternativo conocido como el método de Bairstow se presentará adelante. Una vez más
en este problema hemos utilizado el algoritmo del cociente-diferencia para brindar estimaciones respetables
de todas las raíces. No debe esperarse que un método que pueda hacer esto converja rápidamente, y el
cambio a un algoritmo que converja en forma cuadrática en algún punto apropiado es un paso natural.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
514
Tabla 25-10
-2
O
1 0
5
3
2
0
-
7
-11.6667
-8.6667
3
0
0
-1.6574
-11.6022
0
1.2728
0
1.3924
.0185
2.6091
5.0596
-.9234
0
-.1196
-9.0116
-5.9830
0
1.4286
.1558
7.2346
5.6192
6
2
7.0513
-1.6154
0
.5714
5.2381
4' 0
5
0
-2
0
1.3739
.0097
-2.4408
0
1.3642
SUCESIONES DE STURM
25.33 Defina una sucesión de Sturm.
Una sucesión de funciones f0(x),
condiciones:
f1(x)
fn(x) que satisfaga en un intervalo (a, b) de la recta real las
1. Cada f,(x) es continua.
2.
El signo de fn(x) es constante.
3.
Si fj(r) = 0 entonces fi-1(r) y fi+1(r) ≠ 0.
4.
Si fj(r) = 0 entonces fi-1(r) y fi+1(r) tienen signos opuestos.
5.
Si f0(r) = 0 entonces para h suficientemente pequeña
y se llama sucesión de Sturm.
25.34 Pruebe que el número de raíces de la función f0(x) en el intervalo (a, b) es la diferencia entre el número de
cambios de signo en la sucesión f0(a), f1(a),.. ., fn(a) y f0(b), f1(b) fn(b).
Cuando x aumenta de a a b el número de cambios de signo en la sucesión de Sturm puede ser afec­
tado sólo por una o más de las funciones que tengan un cero, puesto que todas son continuas. En realidad
sólo un cero de f0(x) puede afectarlo. Supongamos que fi(r) = 0 con i ≠ 0, n, y por las propiedades 1, 3 y 4
son posibles los siguientes patrones de signos para h pequeña:
www.elsolucionario.org
ÁLGEBRA NO LINEAL
515
En todos los casos hay un cambio de signo, así que el movimiento por una de tales raíces no afecta el nú­
mero de cambios de signo. Por la condición 2 la función fn(x) no puede tener un cero, por lo que volvemos
finalmente a f0(x). Por la condición 5 perdemos un cambio de signo, entre f0 y f1, cuando nos movemos a tra­
vés de la raíz r. Esto demuestra el teorema. Se observa que las cinco condiciones se han establecido consi­
derando esta característica de conteo de raíces.
25.35 Si f0(x) es un polinomio de grado π sin raices múltiples, ¿cómo puede construirse una sucesión de Sturm
para enumerar sus raíces?
Sea f1(x) - f0(x) y apliquemos el algoritmo euclidiano para construir el resto de la sucesión como sigue:
donde f1(x) es de grado n -1 y las L,{x) son lineales.
La sucesión f0(x),
f1(x)
fn(x) será una sucesión de Sturm. Para probar esto notamos primero que
todas las fi(x) son continuas, puesto que f0 y f1, efectivamente lo son. La condición 2 se cumple, ya que fn es
una constante. Dos f¡(x) consecutivas no pueden anularse en forma simultánea puesto que entonces todas
se anularían, incluso f0 y f1 y esto implicaría una raíz múltiple. Esto demuestra la condición 3. La condición 4
es una consecuencia directa de nuestras ecuaciones de definición y 5 se satisface en virtud que f1 = f0.
Si se aplicara el método a un polinomio que tuviera raíces múltiples, entonces la anulación simultánea
de todas las fi(x) brindaría evidencia de ellas. La deflación del polinomio para eliminar la multiplicidad permi­
te que sea aplicado el método para encontrar las raíces simples.
25.36 Aplique el método de las sucesiones de Sturm para localizar todas las raíces reales de
x4 - 2.4x3 + 1.03x2 + .6X - .32 = 0
Denotando este polinomio como f0(x), calculamos primero su derivada. Puesto que sólo estamos inte­
resados en los signos de las diferentes fi(x), suele convenir emplear un multiplicador positivo para normali­
y tomamos
zar el coeficientθ del término de mayor grado. En consecuencia, multiplicamos
f 1 (x) = x3 - l.8x2 + .515x + .15
El siguiente paso es dividir f0 por f1. Se encuentra el cociente lineal L1(x) = x - .6 que no es de interés inme­
diato, y un residuo de -.556x2 + .759x - .23. Un error común en este punto es olvidar que queremos el ne­
gativo de este residuo. Normalizando también, tenemos
f 2 (x)=x 2 -1.3434x+ .4071
www.elsolucionario.org
516
MÉTODOS NUMÉRICOS
Dividiendo F1, por f3 obtenemos un cociente lineal L2(x) = x - .4566 y un residuo cuyo negativo, después de
normalizar es
f 3 (x) = x-.6645
Por último, dividiendo f2 por f3 encontramos que el residuo es -.4040. Tomando el negativo y normalizando,
podemos elegir
f4(x)=1
Ahora tenemos nuestra sucesión de Sturm y estamos listos para buscar las raíces. Es sencillo confirmar los
signos presentados en la tabla 25.11. Ellos muestran que hay una raíz en el intervalo ( - 1 , 0), una en (1, 2),
y dos raíces en (0,1). Seleccionando más puntos dentro de estos intervalos, todas las raíces pueden locali­
zarse con mayor precisión. Sin embargo, como con el algoritmo del cociente-diferencia es sensato cambiar
en un cierto punto a un proceso que converja con mayor rapidez como el de Newton. Un método que brinde
primeras estimaciones de la ubicación de todas las raíces reales, como la hace el método de Sturm, es an­
tieconómico para la determinación precisa de una raíz cualquiera. En este ejemplo las raíces resultan -.5,
.5. .8 y 1.6.
Tabla 25.11
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
4
4
3
1
0
0
25.37 Muestre que el método de Newton producirá todas las raíces de la ecuación en el problema anterior
siempre que se obtengan aproximaciones iniciales suficientemente buenas.
La figura 25-6 exhibe el comportamiento cualitativo de este polinomio. Es claro que cualquier aproxi­
mación x0 < .5 conducirá a una sucesión que converge hacia esta raíz, puesto que una x0 tal se encuentra
ya en el lado convexo de la curva. De modo similar cualquier x0 > 1.6 producirá convergencia hacia la raíz
más grande. Las raices que están cercanas unas de otras requieren por lo regular aproximaciones iniciales
precisas. La simplicidad de las raíces en este ejemplo puede pasarse por alto con el fin de ver cómo podría
separarse un par más oscuro. Del diagrama es manifiesto que una x0 ligeramente por abajo de .5 producirá
convergencia hacia .5, en tanto que una x0 un poco por encima de .8 dará como resultado convergencia ha­
cia .8, ya que en ambos casos iniciamos en el lado convexo. Observe que al iniciar con x0 = .65, que se en­
cuentra en medio de las dos raices, significa seguir una recta tangente casi horizontal. En realidad, condu­
ce a x1 = 5, después de lo cual ocurriría la convergencia hacia la raíz en 1.6. Estas cosas pueden ocurrir en
una iteración de Newton.
www.elsolucionario.org
ÁLGEBRA NO LINEAL
517
Elg. 25-6
SISTEMAS DE ECUACIONES, MÉTODO DE NEWTON
25.38 Deduzca las fórmulas para resolver f(x, y) = 0, g(x, y) = 0,
xn — xn-1 + hn-1
y n = y n - 1 + kn-1
donde h y k satisfacen
fx(xn-1, yn-1)kn-1=-f(xn-1, yn-1)
gx(xn-1, yn-1)hn-1+gy(xn-1, yn-1)kn-1=-g(xn-1, yn-1)
Estas fórmulas se conocen como el método de Newton para resolver dos ecuaciones simultáneas.
Aproximando f y g por las partes lineales de su serie de Taylor en la vecindad de (xn-1,yn-1):
Esto supone que existen las derivadas implicadas. Con (x, y) denotando una solución exacta, ambos lados
de la izquierda se anulan. Definiendo x = xn y y = yn como los números que hacen que los lados de la dere­
cha se anulen, tenemos de inmediato las ecuaciones requeridas. Esta idea de reemplazar una serie de Taylor por su parte lineal es lo que condujo al método de Newton para resolver una sola ecuación en el proble­
ma 25.8.
25.39 Encuentre los puntos de intersección del círculo x2 + y2 = 2 con hipérbola x2 - y4 = 1.
Este problema particular puede resolverse con facilidad por eliminación. La adición produce 2x2 = 3 y
x = ±1.2247. La sustracción da como resultado 2y2 = 1 y y = ±.7071. Conocer las intersecciones correctas
hace que el problema sea un simple caso de prueba para el método de Newton. Tomemos x0 = 1, y0 = 1.
Las fórmulas para determinar h y k son
www.elsolucionario.org
MÉTODOS NUMÉRICOS
518
y con n = 1 se vuelven 2h0 + 2k0 = 0, 2h0 - 2k0 = 1. Entonces h0 = k0 -
haciendo
y 1 = y0 + k0 = .75
x 1 =x 0 + h 0 =1.25
La siguiente iteración produce 2.5h1 + 1.5k1 = -.125, 2.5h 1 - 1 . 5 k 1 = 0 haciendo h1 = -.025, k1 = -.4167 y
x2 = x1 + h1 = 1.2250
y2 = y1 + k1 = .7083
Una tercera iteración consigue 2.45h2 + 1.4167k2. - .0024, 2.45h2 -1.4167k 2 = .0011 haciendo h2 = - .0003,
x3 = X2 + h2 = 1.2247
y3
= y2 + k2 = .7071
La convergencia a los resultados correctos es evidente. Puede demostrarse que para aproximaciones ini­
ciales suficientemente buenas la convergencia del método de Newton es cuadrática. La idea del método
puede extenderse fácilmente a cualquier número de ecuaciones simultáneas.
25.40 Otros métodos iterativos pueden generalizarse también para ecuaciones simultáneas. Por ejemplo, si
nuestras ecuaciones básicas f(x, y) = 0, g(x, y) = 0 se reescriben como
x = F(x,y)
y = G(x,y)
entonces bajo suposiciones apropiadas sobre F y G, la iteración
xn =
F(xn-1,
yn-1)
yn
= G(xn-1 yn-1)
convergerá para aproximaciones iniciales suficientemente precisas. Aplique este método a las ecuaciones
x = sen (x + y), y = cos (x - y).
Estas ecuaciones se encuentran ya en la forma requerida. Iniciando con la poco inspirada aproxima­
ción inicial x0 - y0 = 0, obtenemos los resultados que se presentan abajo. La convergencia para aproxi­
maciones iniciales pobres como éstas no es de ningún modo la regla. Con frecuencia debe trabajarse bas­
tante para encontrar un reacomodo convergente de las ecuaciones dadas y de primeras aproximaciones
buenas.
0
1
2
3
4
5
6
7
0
0
.84
.984
.932
.936
.935
.935
0
1
.55
.958
1.000
.998
.998
.998
MÉTODOS DESCENDENTES Y OPTIMACION
25.41 ¿Cuál es la idea de un algoritmo del descenso más rápido?
Una diversidad de métodos de minimización implica una función S(x, y) definida de manera tal que su
valor mínimo ocurre precisamente donde f(x, y) = 0 y g(x, y) = 0. El problema de resolver estas dos ecuacio­
nes simultáneas puede entonces reemplazarse por el de minimizar S(x, y). Por ejemplo,
S(x,y) = [f(x,y) 2 + [g(x,y)] 2
www.elsolucionario.org
ÁLGEBRA NO LINEAL
519
alcanza efectivamente su mínimo de cero siempre que f =g =0. Ésta es una elección popular de S(x 1 y).
Continúa latente la pregunta de cómo encontrar tal mínimo. El método del descenso escalonado empieza
con una aproximación inicial (x0, y0). En este punto la función S(x, y) disminuye más rápidamente en la di­
rección del vector
-gradiente
Denotando esto como - grad S0 = [Sx 0 , - Sy0] por brevedad, se obtiene ahora una nueva aproximación (x1,
y1) en la forma
x1=x0- tSx0
y1=y0-tSy0
con f elegida de modo que S(x 1 y1 sea un mínimo. En otras palabras, procedemos de (x0, y0) en la direc­
ción - grad S0 hasta que S empieza a crecer otra vez. Esto completa un paso y otro se inicia en (x,, y,) en la
nueva dirección - grad S,. El proceso continúa hasta que, esperanzadamente, se encuentra el punto míni­
mo.
El proceso se ha comparado con el retorno de un esquiador de una montaña a la parte baja de un va­
lle en una espesa neblina. Incapaz de alcanzar su meta, el esquiador empieza a bajar en la dirección del
descenso más rápido y continúa avanzado hasta que su trayectoria empieza a ascender otra vez. Eligiendo
entonces una nueva dirección del descenso más rápido, efectúa un segundo recorrido del mismo tipo. En
un valle de forma ovalada circundado por montañas es claro que este procedimiento llevará al esquiador
cada vez más cerca de su casa. La figura 25-7 ilustra la acción. Las líneas interrumpidas son líneas de con­
torno o nivel, sobre las cuales S(x, y) es constante. La dirección del gradiente es ortogonal a la dirección del
contorno en cada punto, por lo que siempre dejamos una recta de contorno en ángulos rectos. Avanzar ha­
cia el mínimo de S(x, y) a lo largo de esta recta significa ir a un punto de tangencia con una recta de contor­
no más baja. En realidad, ello requiere un número infinito de pasos de este tipo para alcanzar el mínimo y
se sigue una trayectoria en zigzag antieconómica.
Fig. 25-7
25.42 Aplique el método del descenso más rápido para resolver la ecuación del problema 25.40:
x = sen(x+y)
y = cos(x -y)
Aquí tenemos
S =f 2 + g2 = [x -sen(x+ y))2 + [y - cos (x - y)]
www.elsolucionario.org
520
MÉTODOS NUMÉRICOS
haciendo
= [ x - sen(x+ y)][l - cos (x +y)] + [y - cos (x -y)][scn(x - y ) ]
= [ X - sen(x+y)][- cos (x + y)] + [y - cos (x - y)][l - sen(x - y)]
Supongamos que elegimos x0 = y0 ) -5. Entonces - grad S0= [.3, .6]. Puesto que una constante multiplicati­
va puede absorberse en el parámetro t, podemos tomar
x1 = .5 +
t y1 = .5 + 2t
Después de esto se determinará el mínimo de S(.5 + t, .5 + 2t). Ya sea por búsqueda directa o igualando
S'(t) a cero, descubrimos rápidamente el mínimo cerca de f - .3, haciendo x, = .8 y y1 = 1.1. El valor de
S(x1, y1) es aproximadamente .04, de modo que avanzamos a un segundo paso. Puesto que - grad S1 =
(.5, - .251, efectuamos nuestra primera vuelta en ángulo recto, eligiéndose
x2 = .8 + 2t
y2=1.1-t
y buscamos el mínimo de S(x2, y2). Este resultado demuestra estar cerca de f = .07, haciendo x2 = .94 y y¡ =
1.03. Continuando en esta forma obtenemos las aproximaciones sucesivas que se enlistan a continuación.
Puede observarse la lenta convergencia hacia el resultado del problema 25.40. La convergencia lenta es
común en este método, lo que se utiliza a menudo para brindar buenas aproximaciones iniciales para el al­
goritmo de Newton.
.5
.8
.94
.928
.936
.934
.5
1.1
1.03
1.006
1.002
.998
.36
.04
.0017
.00013
.000025
.000002
El avance en el descenso se indica mediante la trayectoria A en la figura 25-8.
Fig. 25-8
www.elsolucionario.org
ÁLGEBRA NO LINEAL
521
25.43 Muestre que el método de descenso más rápido puede no converger a los resultados requeridos.
Empleando las ecuaciones del problema previo, suponga que elegimos la aproximación inicial x0 = y0
- 0. Entonces - grad S0 = [0, 2], asi que tomamos x1 = 0 y y1 = f. El mínimo de S(0, t) resulta en f = .55 = y,
con S(x1, y1) = .73. Calculando el nuevo gradiente, encontramos - grad S1 = [-2, 0]. Éste apunta hacia el
oeste, alejándose de la solución pronosticada cerca de x = y = 1. Mediante pasos sucesivos nos encontra­
mos recorriendo la trayectoria denominada B en la figura 25-8. Nuestra dificultad aquí es típica de los méto­
dos de minimización. Hay un valle secundario cerca de x = -.75, y - .25. Nuestro primer paso nos ha deja­
do justo al oeste del punto puerto o de paso entre estos dos valles. La dirección de descenso en (0, .55) es,
en consecuencia, hacia el oeste y el descenso hacia el segundo valle continúa. A menudo es necesaria una
cantidad considerable de experimentación antes de que se encuentre un rastro exitoso.
25.44 Generalice la idea de los métodos de descenso para la solución de problemas de optimación o de sistemas
no lineales.
Las dos principales preguntas son en qué dirección avanzar y qué tan lejos ir. La fórmula
x(n) = x(n-1) + tun-1
mantiene abiertas todas las opciones, con x(n-1) la aproximación presente, Un-1 es el vector unitario en la si­
guiente dirección de búsqueda, y t la medida de qué tan lejos ir. En el descenso más rápido,Un-1 es el vec­
tor gradiente negativo. Se ha propuesto una amplia variedad de opciones. Tal vez idealmente debamos se­
guir una curva que es una trayectoria ortogonal de las superficies de contorno, sobre las cuales t es
constante, donde t es la función que se está optimando. Sin embargo, esto nos lleva a ecuaciones diferen­
ciales. Emplear pasos de descenso más rápido de igual longitud es equivalente a aplicar el método de Euler para resolver ecuaciones diferenciales. Incluso el método de Newton podría verse como un método
descendente, con tun-1 igual a -J-1(x)(n-1)F(X(n-1)) en la notación utilizada en la introducción.
FACTORES C U A D R Á T I C O S , MÉTODO DE B A I R S T O W
25.45 Desarrolle una recurrencia para los coeficientes bk en
q(x) = b0xn-2 + • • • + bn_2
r(x) = bn-1(x -u) + bn
cuando q(x) y r(x) están definidas por
p(x) = a0xn + • • • + an = (x2 - ux - v)q(x) + r(x)
Multiplicando a la derecha y comparando las potencias de x, tenemos
Si artificialmente hacemos b-1, ) b-2 = 0, la última recurrencia se cumple para k = 0,1
den, desde luego, de los números u y v.
n. Las bk depen-
25.46 ¿Cómo puede utilizarse la recurrencia del problema anterior en el cálculo de p(x) para un argumento complejo x = a + bi? (Suponga que las ak son reales.)
www.elsolucionario.org
522
MÉTODOS NUMÉRICOS
Con u = 2a y v = - a2 - b2, tenemos x2 - ux - v = 0, por lo que
25
p(x) = bn-1(x-2a) + bn
La ventaja de este procedimiento es que las bk se encuentran por medio de aritmética real, por lo que no se
presenta la aritmética compleja hasta el paso final. En particular, si bn-1 = bn = 0 entonces tenemos p(x) = 0.
Los complejos conjugados a ± bi son, por tanto, ceros de p(x).
25.47 Desarrolle el método de Bairstow para utilizar la iteración de Newton en la solución de las ecuaciones
simultáneas bn-1(u, v) = 0, bn(u, v) = 0.
Para utilizar la iteración de Newton, como se describe en el problema 25.38, necesitamos derivadas
parciales de bn-1 y bn relativas a u y v. Tomando primero derivadas de relativas a u, y dejando ck = ∂bk+1l∂u,
encontramos c-2 = c-1 = 0, c0 = b0, c1 = b1 + uc0, y entonces
ck = bk + uck.x + vc k - 2
El último resultado es efectivamente válido para k = 0, 1
n - 1. De tal modo las ck se calculan a partir
de bk justo como éstas últimas se obtuvieron de las ak. Los dos resultados que necesitamos son
∂bn-1
∂u
cn-2
∂bn
∂u
cn-1
De manera similar, tomando derivadas relativas a v y dejando dk = ∂bk+2/∂v encontramos d-2 = d-1 = 0, enton­
ces d1 ) b1 + ud0, después de lo cual
dk = bk + udk-1 + vdk-2
Lo último se cumple para k - 0 , 1 , . . . , n - 2. Puesto que ck y dk satisfacen consecuentemente la misma recurrencia con las mismas condiciones iniciales, hemos probado que ck = dk para k = 0 , 1 , . . . . n - 2. En par­
ticular,
∂bn-1
∂v
cn-3
∂bn
∂v
Cn-2
y estamos listos para la iteración de Newton.
Suponga que tenemos raíces aproximadas a ± bi de p(x) = 0, y el factor cuadrático asociado x2 - ux v de p(x). Esto significa que tenemos raíces aproximadas de bn-1 = bn = 0 y que buscamos aproximaciones
mejoradas u + h,v + k. Las correcciones h y k están determinadas por
cn-2h + cn-3k +
= -bn-1
cn-1h + cn-2k = -bn
Éstas son las ecuaciones centrales de la iteración de Newton. Resolviendo para h y k,
25.48 Aplique el método de Bairstow para determinar las raíces complejas de la ecuación de Leonardo correcta
hasta nueve lugares.
www.elsolucionario.org
523
ÁLGEBRA NO LINEAL
Ya hemos encontrado excelentes aproximaciones iniciales mediante el algoritmo del cociente-diferencia (véase el problema 25.32): u 0 = -3.3642, v 0 = -14.6033. Nuestra recurrencia produce ahora las siguientes bk y c k :
k
0
1
2
3
ak
1
2
10
-20
bk
1
-1.3642
-.01386
ck
1
-4.7284
1.2901
- .03155
Las fórmulas del problema 25.47 producen entonces h = -.004608, k = -.007930 haciendo
U1 = u0 + h = - 3.368808
v1
= vn + k = - 14.611230
Repitiendo el proceso, encontramos después las nuevas b k y ck:
Esto origina
k
0
1
2
3
ak
1
2
10
-20
bk
1
-1.368808
.000021341
ck
1
-4.737616
1.348910341
h = -.000000108
k = - .000021852
u 2 =-3.368808108
v2=
- .000103380
-14.611251852
Repitiendo el ciclo una vez más se encuentra b2 = b3 = h = k = 0 hasta nueve lugares. Las raíces requeridas
son después de esto
-1.684404054 ± 3.431331350i
Esto puede comprobarse de manera adicional calculando la suma y el producto de las tres raíces y compa­
rando con los coeficientes de 2 y 20 en la ecuación de Leonardo.
Problemas suplementarios
25.49 Aplique el método del problema 25.1 a la ecuación x = e-x para encontrar una raíz cercana a x - .5. Muestre
que al iniciar con x0 = .5, las aproximaciones x10 y x11 concuerdan hasta tres lugares en .567.
25.50 Aplique la aceleración de Aitken en las aproximaciones anteriores calculadas en el problema previo.
¿Cuando producen una aproximación de tres lugares?
www.elsolucionario.org
524
MÉTODOS NUMÉRICOS
21.51 Reescriba la ecuación x3 = x2 + x + 1 como x = 1 + 1/x + 1/x2 y utilice después una iteración del tipo que se
presenta en el problema 25.1 para encontrar una raíz positiva.
25.52 Aplique el método de Newton a la ecuación 25.49. ¿Cuántas iteraciones se necesitan para una precisión de
tres lugares? ¿Para una precisión de seis lugares?
25.53 Aplique el método de Newton a la ecuación del problema 25.51.
25.54 Encuentre la raíz cuadrada de 3 hasta seis lugares.
25.55 Encuentre la raíz quinta de 3 hasta seis lugares.
25.56 Muestre que el método de Newton aplicado a f(x) = 1/x = - Q = 0 conduce a la iteración xn = xn-1(2 - QXn-1)
para producir recíprocos sin división. Aplique esta iteración con Q = e = 2.7182818, iniciando con x0 = .3 y
empezando otra vez con x0 = 1. Una de estas aproximaciones iniciales no está lo suficientemente cerca al
resultado correcto para producir una sucesión convergente.
25.57 Aplique la regula falsi a la ecuación del problema 25.49, iniciando con las aproximaciones 0 y 1.
25.58 Aplique el método del problema 25.18 (interpolación cuadrática) a la ecuación del problema 25.49.
25.59 Aplique el método de la interpolación cuadrática a la ecuación de Leonardo.
25.60 Emplee el método de Bernoulli para encontrar la raíz dominante (real) de la ecuación de Fibonacci x2 = x 1=0.
25.61 Aplique el método de Bernoulli a la ecuación del problema 25.31.
25.62 Aplique el método de Bemouili para encontrar un par dominante de raices complejas conjugadas de
25.63 Utilice el método del cociente-diferencia para encontrar todas las raíces de la ecuación del problema 25.36.
26.64 Emplee el método del cociente-diferencia para localizar todas las raíces de la ecuación del problema 25.62.
25.65 Utilice una sucesión de Sturm para mostrar que 36x6 + 36x5 + 23x4 - 1 3 x 3 - 1 2 x 2 + x + 1 = 0 tiene sólo
cuatro raíces reales y localícelas. Aplique después el método de Newton para determinarlas con precisión.
25.66 Utilice una sucesión de Sturm para mostrar que 288x5 - 720x4 + 694x3 - 321x2 + 71x - 6 = 0 tiene cinco
raíces reales muy cercanas. Aplique el método de Newton para determinar estas raíces hasta seis lugares.
25.67 Utilice el método iterativo para encontrar una solución de
x = .7senx + .2cos y y = .7cos x - .2sen y
cerca de (.5, .5).
www.elsolucionario.org
ÁLGEBRA NO LINEAL
525
25.68 Aplique el método de Newton al sistema del problema anterior.
25.69 Aplique el método de Newton al sistema x = x2 + y2, y = x2 - y2 para encontrar una solución cercana a
(.8, .4).
25.70 Aplique el método del descenso más rápido al sistema del problema anterior.
25.71 Aplique el método del descenso más rápido al sistema del problema 25.67.
25.72 Dado que 1 es una raíz exacta de x3 - 2x2 - 5x + 6 = 0, encuentre las otras dos raíces por deflación a una
ecuación cuadrática.
25.73 Encuentre todas las raíces de x4 + 2x3 + 7x2 - 11 = 0 correctas hasta seis lugares empleando el método de
deflación apoyado por las iteraciones de Newton y Bairstow.
25.74 Aplique el método de Bairstow a x4 = 3x3 + 20x2 + 44x + 5 4 = 0 para encontrar un factor cuadrático cercano
a x2 + 2x + 2.
25.75 Encuentre la raíz más grande de x4 - 2.0379x3 -15.4245x 2 + 15.6696x + 35.4936 = 0.
25.76 Encuentre dos raices cercanas a x = 1 de 2x4 + 16x3 + x 2 - 74x + 5 6 = 0 .
25.77 Encuentre las raíces reales de x3 = x + 4.
25.78 Encuentre una raíz positiva pequeña de x1.8832 = 5.2171x - 2.1167.
25.79 Encuentre una raíz cercana a x=2 de x=2 sen x.
25.80 Encuentre un par de raíces complejas con parte real negativa de x4 - 3X3 + 20x2 + 44x + 5 4 = 0 .
25.81 Encuentre una solución del sistema
x =sen x cosh y y = cos x sen h y
cerca de x = 7, y = 3.
25.82 Resuelva el sistema x4 + y4-67 =0. x 3 - 3 x y 2 + 3 5 = 0 , cerca de x = 2, y = 3.
25.83 Encuentre el mínimo para x positivo de y - (tan x)/x2.
25.84 ¿Dónde tiene la curva y = e-x log x un punto de inflexión?
25.85 Encuentre la raíz positiva más pequeña de 1 - x +
25.86 Encuentre el valor máximo de y(x) cerca de x - 1, dado que sen (xy) = y - x.
25.87 Encuentre hasta doce dígitos una raíz cercana a 2 de x 4 - x = 1 0 .
www.elsolucionario.org
526
MÉTODOS NUMÉRICOS
25.88 Encuentre la raíz real más pequeña de e-x = sen x.
25.89 Descomponga el polinomio de cuarto grado x4 + 5x3 + 3x2 - 5x - 9 en factores cuadrárteos.
25.90 Encuentre una raíz cercana de 1.5 de x = + sen x.
25.91 Encuentre todas las raíces de 2X3 - 13x2 - 22x + 3 = 0.
25.92 Encuentre una raíz cercana de 1.5 de x6 = x4 + x3 + 1.
25.93 Encuentre dos raíces cerca de x = 2 de x4 - 5x3 - 12x2 + 76x - 79 = 0.
25.94 Muestre que el término de segundo grado se elimina de la ecuación cúbica general
x3 + ax2 + bx + c = 0
mediante la traslación x - y - a/3. Véase también el siguiente problema.
25.95 En 1545 Cardano publicó esta fórmula para resolver la ecuación cúbica x3 + bx + c - 0. (Note la ausencia
del término de segundo grado.)
Aplíquela para encontrar al menos la raíz real x = 1 de
x3 + 3x - 4 = 0
¿También puede obtenerse con ella la raíz real x=4 de x 3 - 1 5 x - 4 = 0 ?
25.96 Dada f ( x ) = x 2 - x - 6 ,
a) Tabule y grafique la función en papel mm. en el intervalo (-4, 5).
b) Encuentre las raíces por la fórmula general.
c) Haga un programa con este método para resolver
f(x), con x1= 0, x2= 5, Σ =.0001, N = 50.
d) Con el primer programa anterior, evalúe
f(x) = x3 - 2x - 5, en el intervalo (1,4), N = 50, Σ = .001
APROXIMACIONES SUCESIVAS:
25.97 Sea f(x) = x2 - 2x + 2, diga para qué valores de x0 converge xn+1 - f(xn).
25.98
Para f(x) = cos x, demuestre que xn+1 - f(xn), define una sucesión convergente para cualquier xo. Calcule
la raíz ALFA - COS(ALFA) con tres decimales.
www.elsolucionario.org
ÁLGEBRA NO LINEAL
25.99
527
Suponga que la función g(x) está definida y es diferenciable en el intervalo [0,1] y suponga que g(0) < 0 <
g(1) y 0 < a <, g'(x) < b, donde a y b son constantes.
Demuestre que existe una constante M, tal que la solución de la ecuación g(x) - 0 puede encontrarse
aplicando la iteración de la función f(x) = x + Mg(x).
25.100 Dada f(x) = mxk = 0, si m y k > 0 y usamos aproximaciones sucesivas; ¿Qué podría explicar a grandes
rasgos acerca de k para la convergencia por este método?
25.101 Dé una somera explicación de por qué en los métodos de punto fijo se puso la condición de que |f (x)| < 1.
{Punto fijo: x = f(x)}
25.102 Si deseo obtener la raíz k de un número, ¿cómo puedo hacerlo sin emplear potencias o subrutinas?
25.103 Dada la función f(x) = x2 - x - 6.
a) Tabule y grafique f(x), f(x), y = x, en papel mm. en el intervalo (-4, 5).
b) Resuelva f(x) por la fórmula general.
c) Justifique matemáticamente la condición suficiente de convergencia para este método.
d) Haga un programa con este método para resolver f(x), con x1 = - 3 , Σ =.001, N = 50.
25.104 Determine la raíz cuadrada negativa de .5 con cuatro decimales, escribiendo f(x) - x2 - .5 y resolviendo x
= x2 + x - .5 por este método, tomando x0 = - . 6 . ¿Puede determinarse la raíz cuadrada positiva por este
método?
25.105 Encuentre la raíz cuadrada negativa de .25 por el método del problema 25.104 con x0 = -.6. ¿Por qué converge más rápido?
F A L S A POSICIÓN:
25.106 Dada la función f(x) = x3 - 2x - 5.
a) Tabule y grafique en papel mm. en el intervalo (-4,4).
b) Obtenga máximos, mínimos y puntos de inflexión. (JUSTIFIQUE).
c) Evalúe las condiciones suficientes para este método en el intervalo (1, 4).
d) Haga un programa con este método para obtener la raíz en el intervalo (1,4), N - 50, Σ = .001.
25.107 Con el programa del problema 25.105 calcule
valo (0,43).
resolviendo la ecuación f(x) = x2 - 43 = 0, en el inter­
NEWTON-RAPHSON:
25.108 Derive una fórmula de iteración de Newton-Raphson para encontrar la raíz cúbica de un número positivo
C.
25.109 Haga un programa con el método de Newton-Raphson, para encontrar las raíces de f(x) = x3 - 1.473X2 5.738X + 6.763 = 0
www.elsolucionario.org
528
MÉTODOS NUMÉRICOS
| 25
BAILEY:
25.110 Derive una fórmula recursiva por este método, para encontrar la raíz cuarta de un número positivo C.
25.111 Haga un programa con este método para encontrar dos raíces comprendidas entre 1 y 2 de la f(x) = 4x 12.3x 2 -x+16.2.
BIRGE-VIETA:
25.112 Haga un programa con el método de Birge-Vieta, para encontrar los ceros de P3(x) = x3 - .48x2 - 8x +
7.563 = 0.
LIN-BAIRSTOW:
25.113 Haga un programa con el método de Lin-Bairstow, para encontrar los ceros de P4(x) = x4 - 8x3 + 15x2 +
48x - 52 = 0.
www.elsolucionario.org
Sistemas de ecuaciones
lineales
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Definir con sus propias palabras los conceptos de vector, matriz, orden de una matriz, matriz de
coeficientes, vector de incógnitas, vector de términos independientes, vector solución
(Introducción).
2. Explicar con sus propias palabras en qué consisten las siguientes matrices: cuadrada, nula,
transpuesta, simétrica, diagonal, escalar, adjunta, identidad, singular, no singular, unitaria,
triangular superior, triangular inferior (Introducción).
3. Enunciar las reglas del álgebra de matrices (Introducción).
4. Enunciar las reglas del álgebra que no se cumplen en matrices (Introducción).
5. Realizar las operaciones de suma, resta y multiplicación entre dos matrices dadas (Introducción).
6. Definir y aplicar cada una de las tres operaciones elementales por renglón (o por columna)
(Introducción, Problemas 26.1, 26.2).
7. Definir los conceptos de matrices equivalentes y conjunto solución, y obtenerlos en problemas de
ejemplo (Introducción, Problemas 26.1, 26.2).
8. Definir los conceptos de menor y cofactor, y dada una matriz obtener ambos (Introducción).
9. Definir y obtener el determinante de una matriz; además aplicar sus siete propiedades (Introducción,
Problemas 26.45, 26.98 a 26.100).
10. Encontrar y explicar la utilidad de la norma de una matriz y de la traza de una matriz (Introducción,
Problemas 26.17, 26.20).
11. Estimar la influencia de errores en los datos y de errores de redondeo en los resultados de un
sistema de ecuaciones lineales (Problemas 26.6, 26.17 a 26.26).
12. Definir el concepto de matriz mal condicionada; y dada una matriz poder identificar si está mal
condicionada o no (Introducción, Problemas 26.27, 26.28, 26.95, 26.96).
13. Definir y encontrar la inversa de una matriz dada (Introducción, Problemas 26.38 a 26.44).
14. Obtener, dado un sistema de ecuaciones lineales simultáneas (SEL), su solución, aplicando la regla de
Cramer (en forma manual) (Introducción, Problemas 26.81, 26.82).
15. Obtener, dado un sistema de ecuaciones lineales simultáneas (SEL), su solución, aplicando el
algoritmo de eliminación gaussiana (en forma manual) (Introducción, Problemas 26.1 a 26.6, 26.81 a
26.84).
16. Obtener, dado un sistema de ecuaciones lineales simultáneas (SEL), su solución, aplicando el
algoritmo de eliminación gaussiana con pivoteo parcial (en forma manual) (Introducción,
Problemas 26.1 a 26.6).
www.elsolucionario.org
¡
530
MÉTODOS NUMÉRICOS
17. Obtener, dado un sistema de ecuaciones lineales simultáneas (SEL), su solución, aplicando el
algoritmo de eliminación gaussiana con pivoteo completo (en forma manual) (introducción,
Problemas 26.1 a 26.6).
18. Explicar la relación que existe entre la eliminación gaussiana y los factores de la matriz de
coeficientes; además de la utilidad que nos brinda (Problemas 26.7 a 26.9,26.117).
19. Describir en forma general en qué consisten y cuándo es recomendable utilizar los métodos
directos para solucionar sistemas de ecuaciones lineales simultáneas, citando cuando menos tres de
ellos (Introducción)
20. Obtener, dado un sistema de ecuaciones lineales simultáneas (SEL), su solución, aplicando el
algoritmo de Gauss-Jordan (en forma manual) (Problemas 26.1 a 26.6, 26.81, 26.82).
21. Programar (en cualquier superlenguaje computacional), el algoritmo de Gauss-Jordan, separar lugar en
memoria para matrices de orden 10 por 10; ejecutar y comprobar los resultados (Problemas 26.1 a
26.6,26.81,26.82).
22. Obtener, dado un sistema de ecuaciones lineales simultáneas (SEL), su solución, aplicando el
algoritmo de Gauss-Jordan para inversión en el lugar (en forma manual) (Introducción, Problemas
26.1 a 26.6, 26.10 a 26.12, 26.81, 26.82).
23. Programar (en cualquier superlenguaje computacional), el algoritmo de Gauss-Jordan para inversión
en el lugar, separar lugar en memoria para matrices de orden 10 por 10; ejecutar y comprobar los
resultados (Introducción, Problemas 26.1 a 26.6, 26.10 a 26.12, 26.81, 26.82).
24. Demostrar el teorema fundamental del álgebra lineal (Problema 26.13).
25. Explicar y desarrollar el algoritmo de Doolittle de factorización de matrices (Problemas 26.14,
26.113 a 26.116).
26.
Explicar y desarrollar el algoritmo de Crout de factorización de matrices (Problemas 26.15, 26.113,
26.116).
27. Explicar y desarrollar el algoritmo de Choleski de factorización de matrices (Problemas 26.16,
26.113 al 26.116).
28. Obtener, dado un sistema de ecuaciones lineales simultáneas (SEL), su solución, aplicando el
algoritmo de Montante (en forma manual) (Introducción, Problemas 26.1 a 26.6, 26.81, 26.82).
29. Programar (en cualquier superlenguaje computacional), el algoritmo de Montante, separar lugar en
memoria para matrices de orden 10 por 10; ejecutar y comprobar los resultados (Introducción,
Problemas 26.1 a 26.6, 26.81, 26.82).
30. Describir en forma general en qué consiste y cuándo es recomendable la aplicación iterativa de los
métodos directos para solucionar sistemas de ecuaciones lineales simultáneas (Introducción,
Problemas 26.27, 26.28, 26.83 a 26.85).
31. Describir en forma general en qué consisten y cuándo es recomendable utilizar los métodos
iterativos para solucionar sistemas de ecuaciones lineales simultáneas, citando cuando menos dos
de ellos (Introducción, Problemas 26.29 a 26.35, 26.85 a 26.94).
32. Obtener, dado un sistema de ecuaciones lineales simultáneas (SEL), su solución, aplicando el
algoritmo de Jacobi (en forma manual) (Introducción, Problemas 26.29 a 26.35, 26.85 a 26.94).
33. Programar (en cualquier superlenguaje computacional), el algoritmo de Jacobi, separar lugar en
memoria para matrices de orden 10 por 10, ejecutar y comprobar los resultados (Introducción,
Problemas 26.29 a 26.35, 26.85 a 26.94).
www.elsolucionario.org
26
SISTEMAS OE ECUACIONES LINEALES
531
34. Obtener, dado un sistema de ecuaciones lineales simultáneas (SEL), su solución, aplicando el
algoritmo de Gauss-Seidel (en forma manual) (Introducción, Problemas 26.29 a 26.35, 26.85 a 26.94).
35.
Programar (en cualquier superlenguaje computacional), el algoritmo de Gauss-Seidel, separar lugar en
memoria para matrices de orden 10 por 10; ejecutar y comprobar los resultados (Introducción,
Problemas 26.29 a 26.35, 26.85 a 26.94).
36. Describir en forma general en qué consisten y cuándo es recomendable la aplicación de los
métodos de relajación y sobrerrelajación para solucionar sistemas de ecuaciones lineales
simultáneas (Problemas 26.36, 26.37).
37. Aplicar, de acuerdo con su criterio y justificando su elección con los conocimientos adquiridos en este
capítulo, el mejor método para encontrar la inversa de una matriz o bien la solución a un sistema
de ecuaciones en problemas de ejemplo (Introducción, Problemas 26.38 a 26.44,26.97,26.109 a
26.111, 26.119, 26.122, 26.123).
38. Elaborar una tabla que muestre comparativamente las ventajas y las desventajas de cada uno de los
métodos para solucionar sistemas de ecuaciones lineales simultáneas (SEL) cubiertos en este capítulo
(Introducción).
39. Explicar con sus propias palabras los conceptos y la utilidad de valores característicos y vectores
característicos de una matriz, mencionando los métodos que se pueden emplear para obtenerlos
(Problema 26.46).
40. Obtener valores y vectores característicos de un sistema, mediante el polinomio característico
(Problemas 26.47, 26.48, 26.101, 26.128).
4 1 . Aplicar el teorema de Cayley-Hamilton para obtener la ecuación característica de una matriz
(Problema 26.49).
42. Demostrar y aplicar el teorema de Gerschgorin (Problemas 26.50 a 26.52).
43. Explicar con sus propias palabras y aplicar el método de las potencias, para obtener valores y
vectores característicos de una matriz (Problemas 26.53 a 26.58, 26.102 a 26.104, 26.120, 26.121,
26.125 a 26.127).
44. Explicar con sus propias palabras y aplicar el método Inverso de las potencias, para obtener valores y
vectores característicos de una matriz (Problemas 26.59 a 26.61, 26.118, 26.120, 26.121, 26.12Í- a
26.127).
45.
Explicar con sus propias palabras y aplicar el método de Jacob!, para obtener una matriz ortogonal, a
partir de una matriz real y simétrica (Problemas 26.62,26.63,26.105,26.106).
46. Explicar con sus propias palabras y aplicar el método de Given (modificación del método de Jacobi),
para obtener una matriz ortogonal, a partir de una matriz real y simétrica (Problemas 26.64, 26.65,
26.107,26.108).
47. Explicar con sus propias palabras en qué consisten y la utilidad de las transformaciones de
similaridad (Problemas 26.66, 26.67).
48. Definir en qué consiste la matriz de Hessenberg y poder obtenerla mediante eliminación gaussiana
(Problemas 26.68 a 26.70).
49. Explicar con sus propias palabras y aplicar el método QR, para obtener valores característicos
(Problemas 26.71 a 26.76, 26.129, 26.130).
50. Trasladar los conocimientos adquiridos en sistemas de ecuaciones con números reales a sistemas
de ecuaciones con números complejos (Problemas 26.77 a 26.80,26.112,26.131).
www.elsolucionario.org
532
MÉTODOS NUMÉRICOS
ALGUNAS DEFINICIONES IMPORTANTES
DETERMINANTE DE UNA MATRIZ 2 x 2: Det A = IA| =a11 a22 - a12a21.
DETERMINANTE DE UNA MATRIZ 3 x 3: Este método sólo funciona en matrices 3 x 3. Se escribe A y a la de­
recha sus dos primeras columnas; a continuación se calculan los seis productos, tomando la diagonal principal con
flecha hacia abajo y asi sus diagonales paralelas, después la diagonal a 90 grados de la principal con flecha hacia
arriba y así sus diagonales paralelas. Las flechas hacia arriba llevan signo negativo (-) y las que van hacia abajo
llevan signo positivo (+).
En los sistemas de ecuaciones lineales, es muy importante conocer la definición del determinante, ya que éste nos
dará elementos de juicio para poder resolverlos de la manera más efectiva y elegir el mejor método, que en su ma­
yoría están basados en la eliminación gaussiana. Sea el sistema 2 x 2 :
all x l+ a l 2 x 2 = b1
a2l x 1 + a22 x 2 = b2
all a22 x 1 + a12a22 x 2 = a22 b1
-al2a21 x 1 + a12a22 = a l2b2
(al1a22 - al2a21) x l = a22 b1 - al2b2
x 1 = a22 b1 - a12b2
a11a22 - a12a21 si el denominador ≠ 0 => solución única
1.
El denominador se llama DETERMINANTE, y tiene solución única <=> Det ≠ 0.
2.
Si Det = 0, no tiene solución, o tiene un número ∞ de soluciones.
SOLUCIÓN ÚNICA
NÚM. ∞ SOLUCIONES
NO TIENE SOLUCIÓN
Consistente
intersección
Consistente
coincidentes
Inconsistente
paralelas
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
533
MENOR: En una matriz A n x n, un menor M es la submatriz (n-1) x (n-1) que se obtiene de A, al eliminar el ren­
glón i y la columna j de A.
COFACTOR: El cofactor A del elemento a de cualquier matriz cuadrada A, es igual (-1 )i+j veces el determinante
de la submatriz obtenida de A, al quitar el renglón i y la columna j.
Cofactor
Menor
DETERMINANTE DE UNA MATRIZ DE ORDEN n x n Det A = |A|, para obtener este determinante, se mantiene
constante un renglón o una columna y entonces se multiplica el elemento a por su cofactor A a través del
renglón o columna que se mantuvo constante. A la expresión resultante se le conoce como desarrollo por cofactores.
Para toda i constante
Para toda j constante
EJEMPLO PARA OBTENER LA MATRIZ DE COFACTORES DE A3x3.
Matriz original
Matriz de signos
a11 al2 al3
a21 a11 a23
a31 a32 a33
La matriz de signos se obtiene al efectuar la operación (-1
Matriz
de
cofactores
A11=1|M11| = +|a22a23|
|a32a33|
A21 = -|M11| = - | a l 2 a l 3 |
|a32 a33|
A12 = -|Ml2| = -|a2la23|
|a3l a33|
A22 = + | M 2 2 | - + | a l l a l 3 |
|a31 a33|
A13 = +|M13| = +|a21a22|
|a31a32|
A23 = -|M23| = -|a11al3|
|a31 a32|
A31 - +|M31| = +|al2al3|
|a22 a23|
A32 = -|M32| = - | a l l a l 3 |
|a21a23|
A33=+|M33| = +|a11al2|
|a21a22|
MATRIZ TRIANGULAR SUPERIOR: Aquella que tiene todos sus componentes abajo de la diagonal principal
iguales a cero.
www.elsolucionario.org
534
MÉTODOS NUMÉRICOS
MATRIZ TRIANGULAR INFERIOR: Aquella que tiene todos sus componentes arriba de la diagonal principal igua­
les a cero.
El determinante de una matriz triangular (superior o inferior) es igual al producto de sus componentes diago­
nales.
MATRIZ EN FORMA ESCALONADA: Aquélla que se encuentra en forma triangular superior o inferior y que ade­
más tiene unos en la diagonal.
PROPIEDADES DE LOS DETERMINANTES:
1. Si todos los elementos de un renglón o columna de A son ceros, det A = 0.
2.
La multiplicación de cada elemento en el renglón i o columna y de la matriz A por un escalar β, multiplica
al determinante por β=>β|A|.
3.
Si las matrices A, B, C son casi idénticas excepto por la columna j, y también la columna; de la matriz
C es la suma de las columnas j de A y de β, = > det C = det A + det B. Esto es válido para renglones.
4.
El intercambio de dos renglones o dos columnas de una matriz A, cambia el signo del determinante.
5. Si A tiene dos renglones o dos columnas iguales, det A = 0.
6.
Si A tiene dos renglones o dos columnas proporcionales (múltiplo constante), det A = 0.
7. Si un múltiplo de un renglón o columna de A se suma a otro renglón o columna de A, no cambia el
determinante; esto es aplicar la operación Ai, j(β).
TEOREMA 1. Sea A n x n, entonces a/1 Aj1 + ai2 Ai2 + • • • +ain Ajn = 0, si i ≠ j.
TEOREMA 2. Sea A n x n, entonces det A = det A'.
TEOREMA 3. Sean A y B n x n entonces det AB = det A det B.
MATRIZ SIMÉTRICA: A n x n es simétrica si A' = A.
MATRIZ ANTISIMÉTRICA: A n x n es antisimétrica si A' = -A, => det A = (-1)n det A. Si n es impar, => det A = 0.
MATRIZ ORTOGONAL: A n x n es ortogonal si es invertible y A -1 = At, => det A = ±1.
RELACIÓN ENTRE DETERMINANTE Y MATRIZ INVERSA:
TEOREMA 4. Si A es invertible => det A ≠ 0 y det A-1 = 1/ det A.
MATRIZ ADJUNTA: Es la transpuesta de la matriz de cofactores.
TEOREMA 5. Sea A nxn => A (adj A) = (det A) |.
TEOREMA 6. Sea A nxn, => A es invertible <=> det A ≠ 0, entonces
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
535
TEOREMA 7. Sea A nxn; cada uno de los siguientes enunciados implica los restantes.
1. A es invertible.
2.
La única solución al sistema homogéneo Ax = 0, es la solución trivial, x = 0.
3.
El sistema Ax = b tiene una solución única para cada vector b.
4.
A es equivalente por renglones a la identidad.
5.
Los renglones y columnas de A son linealmente independientes.
6.
det A ≠ 0.
LA REGLA DE C R A M E R :
TEOREMA 8. Sea A nxn, => A es invertible <=> det A ≠ 0, entonces la solución al sistema Ax = b está dada por:
En donde Di = det (1a parte de A, b, 2a parte de A)
RESUMEN DE LOS MÉTODOS NUMÉRICOS "DIRECTOS" PARA OBTENER LA INVERSA Y
EL DETERMINANTE DE UNA MATRIZ
Producen una solución exacta en un número predeterminado de pasos; se utilizan en sistemas bien condiciona­
dos y en aquellos donde sabemos por dónde se encuentra la solución.
Eliminación gaussiana,
Eliminación gaussiana con pivoteo parcial,
Eliminación gaussiana con pivoteo completo,
Eliminación de Gauss-Jordan,
Eliminación de Gauss-Jordan en el lugar,
Inversión de matrices por particiones,
Cofactores,
Regla de Cramer y
Montante.
Ax-b
vector de términos independientes
vector de incógnitas o solución
matriz de coeficientes
www.elsolucionario.org
536
MÉTODOS NUMÉRICOS
operaciones elementales por renglón (OER):
Sirven para reducir matrices a la forma escalonada y escalonada reducida.
1) Mi(c) => Multiplicar el renglón i por la constante c.
2) Ai, j(c) => Multiplicar el renglón i por la constante c y sumarlo al j.
3)
Pi, j => Intercambiar i con j.
4) A
B => Las matrices A y B son equivalentes por renglón.
Eliminación gaussiana: Reduce la matriz de coeficientes a la forma escalonada.
Eliminación gaussiana con pivoteo parcial: En este caso se va a dividir siempre por el componente mayor de
una columna, evitando asi en lo posible el error por redondeo.
Eliminación gaussiana con pivoteo completo: En este caso se va a encontrar el elemento de la matriz A con
mayor valor absoluto y no solamente el elemento en la primera columna diferente de cero. El problema principal es
que implica una nueva designación de variables cuando se intercambian las columnas para traer el pivote a la pri­
mera columna.
Eliminación de Gauss-Jordan: Reduce a la forma escalonada reducida.
Inversión de matrices en el lugar: Es el método de Gauss-Jordan, pero sólo usa la matriz de coeficientes origi­
nal, con el vector de términos independientes a la derecha (aumentada) y a la derecha sólo un vector de la identi­
dad, ahorrando el espacio del resto de la identidad.
Montaje: Basado en la obtención de determinantes (2 x 2) y sólo utiliza números enteros.
Inversión de matrices por particiones: Este método se emplea cuando tenemos matrices muy grandes, se parte
la original en cuatro y se invierte cada parte de la matriz original; posteriormente se plantean ecuaciones que rela­
cionan las cuatro partes y se vuelven a integrar en una inversa completa.
A continuación se encuentran los algoritmos de los métodos anteriores.
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
537
Método de eliminación gaussiana con pivoteo parcial. En esta parte se intercambian los renglones, de manera
que el pivote máximo de la matriz aumentada quede en el primer renglón.
www.elsolucionario.org
538
MÉTODOS NUMÉRICOS
Continuación del método de eliminación gaussiana con pivoteo parcial.
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
539
MÉTODO DE MONTANTE:
Sea el sistema
2x1 + 3 x 2 - x3+ x4= 2
-xl + 2x2 + 3x3 - 2x4 = 13
x l - x2 + 2x3 +
2x4=
3
-2x1 - 2x2 - 4x3 - 3x4 = -12
1o.
Se formará la matriz aumentada y a continuación a la derecha una matriz identidad del mismo orden.
2 o . Se toma como pivote el elemento ubicado en el lugar ( 1 , 1 ) . Se deja intacto el primer renglón y se hacen determinantes (2x2) con respecto al elemento pivote y los demás renglones uno por uno, lo cual modifica toda la matriz.
•
•
El resultado del determinante se coloca diagonalmente en el lugar opuesto al elemento pivote, recorriendo hacia abajo la columna que se está modificando
Abajo del pivote se ponen ceros.
a22 = (2)(2)-(-l)(3)= 4 + 3 - 7
a32 = (2)(-l) - (1)(3) = -2 -3 - -5
a42 - (2)(-2) - (-2)(3) = -4 +6 - 2
3o.
•
•
•
•
a23 = (2)(3) - (-1)(-1) = 6 - 1 = 5
a33 = (2)(2) - (1)(-1) = 4 + 1 = 5
a43 = (2)(-4) - (-2)(-l) = -8 -2 = -10
Se toma el elemento (i, i) para todo i ≠ 1 como el nuevo pivote.
Se toma el pivote anterior como divisor.
Se deja intacto el renglón con el nuevo pivote.
Se vuelve a hacer el procedimiento de los determinantes ( 2 x 2 ) , pero cada uno se divide entre el pivote ante­
rior.
Al terminar, se ponen ceros abajo y arriba del pivote nuevo.
a11-[(7)(2)-(3)(0)]/2=14/2=7
al3 = [(7)(-l) - (3)(5)]/2 = (-7 -5)/22 = -22/2 = -11
al7 = [(7)(0) - (3)(2)]/2 = (0 - 6)/2 = -6/2 = -3
www.elsolucionario.org
540
MÉTODOS NUMÉRICOS
a33 = [(7)(5) - (-5)(5)]/2 = (35 + 25)/2 = 60/2 = 30
a43 = [(7)(-10) - (2)(5)]/2 = (-70 -10)/2 = -80/2 = -40
a45 = [(7)(-20) - (2)(28)]/2 = (-140 -56)/2 = -196/2 = -98
a47 = [(7)(0) - (2)(2)]/2 = (0 - 4)/2 = -4/2 = -2
4 a . Se repite iterativamente el paso 3 hasta terminar el último renglón de la matriz.
Determinante = -30
Matriz adjunta
5a. Se divide todo el sistema entre el determinante.
IDENTIDAD Vector
solución
INVERSA
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
541
INVERSA POR PARTICIONES
Este método se recomienda cuando se requiere invertir sistemas de ecuaciones lineales tan grandes que hacerlo
en computadora de una sola vez nos genera problemas de alojamiento en memoria principal.
Sea la matriz
se asume que se
conoce la inversa de
y existe una matriz inversa
Entonces:
y ya que M M-1
A
B
C
D
www.elsolucionario.org
542
MÉTODOS NUMÉRICOS
M é t o d o de m o n t a n t e : | A |I | => | D e t | | A d j |
CERO EN LA
DIAGONAL
PRINCIPAL,
REVISAR
PASA EL RESULTADO
DEL VECTOR
UNITARIO A LA
MATRIZ ORIGINAL
PONE EL VECTOR
UNITARIO EN LA
HACE CEROS
ARRIBA Y ABAJO
DE LA DIAGONAL
PRINCIPAL
POSICIÓN N+1
DIVIDE ENTRE EL
ELEMENTO
PIVOTE
www.elsolucionario.org
543
SISTEMAS DE ECUACIONES LINEALES
Método de eliminación gaussiana, para la inversión de matrices en el lugar: [ A |
INICIO
FIN
FIN
CERO EN LA
DIAGONAL
PRINCIPAL,
REVISAR
PONE EL VECTOR
UNITARIO EN LA
POSICIÓN N+1
HACE CEROS
ARRIBA Y ABAJO
DE LA DIAGONAL
PRINCIPAL
DIVIDE ENTRE EL
ELEMENTO
PIVOTE
www.elsolucionario.org
]
MÉTODOS NUMÉRICOS
544
EJEMPLO DE INVERSIÓN EN EL LUGAR:
INVERSA
SOLUCIÓN
TABLA CON CARACTERÍSTICAS DISTINTIVAS DE LOS MÉTODOS PARA INVERSIÓN DE MATRICES,
OBTENCIÓN DE CONJUNTO SOLUCIÓN Y OBTENCIÓN DE DETERMINANTE:
CARACTERÍSTICA
Inv.Lug
Montante
Cramer
Gauss
G.Jordan
Cofact
Computacional
Manual
T. operación comp.
T. operación manual
Error redondeo
Facilidad programación
Memoria p. ejecución
Bueno
Malo
Rápido
Lento
Regular
Fácil
Poca
Excelente
Malo
Rápido
Muy lento
Poco
Fácil
Mucha
Regular
Bueno
Rápido
Regular
Regular
Complic.
Poca
Regular
Excelente
Menos R.
Rápido
Regular
Media
Mucha
Bueno
Bueno
Rápido
Regular
Regular
Fácil
Mucha
Mediano
Regular
Rápido
Regular
Poco
Complic.
Poca (det)
Mucha (A-1)
USO REPETITIVO DE MÉTODOS DIRECTOS:
Se utilizan en sistemas mal condicionados, cuando el resultado de un Gauss nos da una solución alejada de
la real, a causa del error de redondeo. Normalmente una o dos iteraciones serán suficientes.
www.elsolucionario.org
26
SISTEMAS DE ECUACIONES LINEALES
545
Se considera que un sistema de ecuaciones lineales está mal condicionado, cuando debido a un pequeño
error de redondeo nos genera una solución muy alejada de la solución real.
Una forma de reconocer los sistemas mal acondicionados, es comparando los coeficientes de la matriz con
su determinante; si el determinante es muy pequeño con respecto a los coeficientes, el sistema probablemente
sea mal condicionado.
Si el sistema AX = B no tiene solución exacta, se puede obtener un error por diferencia de AX, - B = E1, dondé E1 sería el vector de error, además definimos βX = X - X1.
Corregimos de acuerdo con las fórmulas anteriores el resultado:
A(X1 +βX1) - B = E 2 SI E1 < E2 significa que ésta es una mejor aproximación.
Se continúa el procedimiento, hasta que el error sea casi cero; esto implica que el vector Ek+1 tenga todos
sus elementos aproximadamente iguales a cero.
A(X1 + βX1 + βX2 + βX3 + • • • + βX, + • • • + βX1) - B = Ek+1.
SOLUCIÓN DE SISTEMAS LINEALES
Éste puede muy bien ser el principal problema del análisis numérico. Gran parte de las matemáticas aplicadas se
reducen a un conjunto de ecuaciones lineales, o a un sistema lineal,
Ax = b
con la matriz A y el vector o dados y el vector x por determinarse. Se ha desarrollado un amplio conjunto de algoritmos para hacer esto, varios de los cuales se presentarán. La variedad de algoritmos disponibles indica que el
carácter aparentemente elemental del problema es engañoso. Hay numerosos escollos.
La eliminación gaussiana es uno de los algoritmos más antiguos y sigue siendo uno de los más populares. Implica sustituir ecuaciones por combinaciones de ecuaciones de manera tal que se obtenga un sistema triangular
u11x1 + u12x2 + • • • +
u1n
= c1
u22x2 + • • • + u2nxn = c2
unnxn = cn
Después de esto, los componentes del vector x se encuentran con facilidad, uno después de otro, mediante un
proceso denominado sustitución hacia atrás. La última ecuación determina xn, la cual se sustituye entonces en la
ecuación anterior para obtener xn-1, y asi sucesivamente.
El algoritmo de Gauss produce también una factorización de la matriz A, en la forma A = LU, donde U es la
matriz triangular superior que se mostró antes y L es una matriz triangular inferior con unos en la diagonal. El algo­
ritmo puede utilizarse para probar el teorema fundamental del álgebra, que trata con la cuestión de si existe o no
una solución. El teorema garantiza una solución única de Ax = b precisamente cuando el correspondiente sistema
homogéneo Ax = 0 tiene sólo la solución x = 0. Ambos sistemas, asi como la matriz de coeficiente A, se denomi­
nan en ese caso no singulares. Cuando Ax = 0 tiene otras soluciones aparte de x = 0, ambos sistemas y la matriz
son singulares. En este caso Ax = b no tendrá ninguna solución o tendrá una infinidad de soluciones. Los sistemas
singulares ocurren en problemas de eigenvalores. Si los métodos de este capítulo se aplican en forma descuidada
en un sistema singular, existe la curiosa posibilidad de que los inevitables errores de redondeo lo alterarán hasta
www.elsolucionario.org
546
MÉTODOS NUMÉRICOS
dejado como un sistema no singular "casi idéntico". Una "solución" calculada puede en esas condiciones producirse donde realmente ninguna exista.
Los métodos de factorización convierten A en productos de la forma LU o LDU, donde L es una matriz con
ceros arriba de la diagonal principal, U es una matriz con ceros debajo de ella, y D es una matriz que tiene sólo
elementos diagonales diferentes de cero. La matriz L se llama triangular inferior y U es la triangular superior. Si L o
U tienen todos los elementos diagonales iguales a 1, se llaman triangulares unitarias. Los métodos de Doolittle,
Crout, Cholesky y, como ya se mencionó, Gauss producen factorizaciones. Cuando A se ha factorizado de esta
manera, es posible llegar con facilidad a la solución. Puesto que
Ax = LUx = L(Ux) = Ly = b
primero resolvemos Ly = b para y y después Ux = y para x. El primero de estos sistemas triangulares responde a
la sustitución hacia adelante, y el segundo a la sustitución hacia atrás.
Los métodos iterativos generan sucesiones de aproximaciones sucesivas al vector solución x. El método clásico de este tipo es el de Gauss-Seidel, que reacomoda el sistema Ax = b en la forma
x1 = •••
x2 = • • •
xn = •••
resolviendo la i-ésima ecuación para xi. Una aproximación inicial para todas las xi, permite que cada componente
se corrija en su turno y cuando el ciclo se completa iniciar otro. Varios teoremas de convergencia se han probado.
El método se emplea a menudo para matrices dispersas A, en las cuales muchos elementos son cero.
El refinamiento iterativo de una solución aproximada x(1) empleando el vector residuo r, definido por
r = b - Ax(1)
es a menudo un algoritmo útil. Sea e el error
e = x-x (1)
y observamos que
Ae = Ax - Ax(1) = b - (b - r) = r
La solución de Ae = r produce una aproximación a e, digamos e(1), a partir de la cual
x(2) = x(1) + e (1)
Consigue una nueva aproximación a la verdadera solución x. La rutina puede continuarse en tanto parezca pro­
ductiva.
Hay una amplia variedad de métodos iterativos más elaborados.
El error en una solución calculada x(c) ocurre por una combinación de razones. La información de entrada
puede ser imperfecta, esto es, los elementos A y b pueden incluir errores. Con toda seguridad habrá errores de re­
dondeo pruducidos durante el curso del algoritmo de solución, probablemente millones de ellos en un problema de
gran escala. Cuando se termina un proceso iterativo convergente, es poco probable que la aproximación que se
está manejando sea la verdadera solución. Pueden hacerse estimaciones del error final debido a tales fuentes, y
resultan ser importantes, aunque con frecuencia bastante conservadoras. El análisis de error hacia atrás es una
útil herramienta en la investigación del problema del redondeo interno.
www.elsolucionario.org
26
SISTEMAS DE ECUACIONES LINEALES
547
El carácter de la matriz coeficiente A afecta considerablemente el comportamiento del error. Los sistemas
aproximadamente singulares son en extremo sensibles a pequeños errores en A y b y a los redondeos internos.
La condición de A puede describirse numéricamente empleando la idea de una norma de matriz, significando un
número de condición alto una matriz casi singular y un control del error relativamente pobre. Tales matrices también se llaman mal condicionadas. Algunas veces una condición pobre se dará a conocer por sí misma por el comportamiento errático del algoritmo. Desafortunadamente, esto no siempre es cierto.
INVERSIÓN DE MATRICES
Conocer la inversa de A permitiría, desde luego, resolver el sistema Ax = b como un subproducto, puesto
que
aunque ésta suele ser una ruta antieconómica para la solución de un sistema lineal. El conocimiento completo de
los elementos de A-1 se requiere sólo en unos cuantos tipos de aplicaciones, principalmente en el análisis estadístico. Los métodos que acaban de describirse para resolver Ax = b pueden adaptarse para encontrar inversas. Los
métodos de eliminación, factorización, iteración e intercambio se ilustrarán en los problemas.
MÉTODOS ITERATIVOS para la solución de sistemas de ecuaciones lineales:
Estos métodos producen una secuencia de aproximaciones sucesivas, que bajo condiciones especificadas convergen a un vector solución.
Se utiliza una aproximación inicial que puede ser arbitraria, se utilizan en sistemas que tienen que ver con la
solución de ecuaciones diferenciales parciales.
Estos métodos son Jacobi y Gauss-Seidel.
JACOBI
GAUSS-SEIDEL
Se parte de un sistema de ecuaciones de la forma:
a11X1 + a12X2 + a13X3 + • • • + a1iXi + • • • + a1nXn = b1
a 2l X 1 + a22X2 + a23X3 + • • • + a2i Xi + • • • + a l 2 X n = b2
a31X1 + a32X2 + a33X3 + • • • + a31 Xi + • • • + a3nXn = b3
a11X1 + a 2 X 2 + an33X3 + • • • + ani Xi + • • • + annXn = bn
Se resuelve la X correspondiente a cada renglón:
X1 = l/a11 (b1 + 0 - a12X2 - a13X3 - • • • - a1iXi - • • • - a1nXn)
X2 = 1/a22 (b2 + a21X1 + 0 - a23X3 - • • • - a2i/Xi - • • • - a1nXn)
X3 = l/a 33 (b3 + a 3l X 1 - a32X2 + 0 - • • • - a3iXi - • • • - a3nXn)
Xn = l/ann (bn - an1Xi - an2X2 - an3X3 -•••- aniXi - • • • + 0)
www.elsolucionario.org
548
MÉTODOS NUMÉRICOS
Se dan valores arbitrarios en el vector X inicial: (X1k, X2k X3k, • • •, Xik, • • • Xnk) para todas las X.
Se sustituyen estos valores en las ecuaciones recursivas, tomando en cuenta el método.
jACOBI:
X1k+1 = 1/a11 (b1 + 0 - a12X2k - a 13 X 3 k - • • • -a1iX1k - • • •- a1nXnk
GAUSS-SEIDEL:
ALGORITMOS DE LOS MÉTODOS:
JACOBI
GAUSS-SEIDEL
1. Definición de parámetros y datos:
N = Número de incógnitas
E = Criterio de convergencia
K = Contador de iteraciones = 0.
Leer los valores del vector inicial X.
Leer la matriz aumentada de orden (N x N + 1)
2.
M = Número máximo de iteraciones
Dividir cada ecuación entre su elemento de la diagonal principal:
i
i
a¡j =
aij/aii
para i = 1, 2 , . . . , n y para.j = 1, 2 , . . ., n + 1
3.
Incrementar el contador de iteraciones K = K + 1.
4.
Calcular las iteraciones siguientes Xnk+1 utilizando la ecuación de recurrencia apropiada, dependiendo del
método que se esté utilizando:
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
549
JACOBI:
(para i = 1,2,.... n)
GAUSS-SEIDEL:
(para i = 1, 2 , . . . , n)
5.
Probar la convergencia:
a) Si alguna | XAik+1 - Xik > E, vaya al paso 6.
b) Si todas las | XAik+1 - Xik I < E, vaya al paso 7.
6.
Probar el contador de iteraciones:
a) Si K < M, vaya al paso 3.
b) Si K > M, vaya al paso 8.
7.
Hemos encontrado el resultado; imprimir Xi - Xik+1 (para i = 1, 2
n)
FIN.
8. Imprimir o desplegar "FALLA LA CONVERGENCIA EN M ITERACIONES". FIN.
observaciones:
MATRIZ CON DIAGONAL DOMINANTE: Significa que en cada renglón el valor absoluto del elemento diagonal es
mayor que la suma de los valores absolutos de los elementos fuera de la diagonal principal.
para i = 1,2,... ,n
Cuando no se tiene diagonal dominante, podremos reordenar el sistema intercambiando renglones (lo cual como
sabemos, no cambia la solución) y posiblemente la obtengamos.
• Condición suficiente de convergencia para Jacobi y Gauss-Seidel.
para i = 1 , 2 , . . . , n
• Jacobi y Gauss-Seidel se usan en sistemas cuya matriz de coeficientes tiene diagonal dominante.
•
Generalmente (no siempre) la razón de convergencia de Gauss-Seidel es el doble que en Jacobi.
www.elsolucionario.org
550
MÉTODOS NUMÉRICOS
PROBLEMAS DE EIGENVALORES
Los problemas de eigenvalores requieren que determinemos números λ tales que el sistema lineal Ax =λx
tenga soluciones diferentes de x = 0. Estos números se denominan eigenvalores. Son también de interés las so­
luciones correspondientes o eigenvectores. Se presentarán tres métodos generales de tratamiento.
1. El polinomio característico de una matriz A tiene como sus ceros los eigenvalores de A. Un procedimiento
directo, que se asemeja a la eliminación gaussiana, para determinar este polinomio será incluido. Para
encontrar sus ceros, pueden emplearse los métodos del capítulo 25. Con un eigenvalor a la mano, la sus­
titución en Ax = λx produce un sistema singular. El valor de algún componente de x puede especificarse y
el sistema reducido resolverse mediante nuestros métodos para sistemas lineales.
2.
El método de potencias genera los vectores
con V un vector inicial un poco arbitrario, y produce el eigenvalor dominante con sus eigenvectores. Para
valores grandes de p resulta que x(p) es cercano a un eigenvector correspondiente a
3.
fórmula conocida como el coeficiente de Rayleigh. Las modificaciones conducen a eigenvectores abso­
lutamente más pequeños y a ciertos eigenvectores que siguen a los primeros dominantes.
Una variación interesante utiliza la idea de correr los eigenvalores para acelerar la convergencia del
método de potencias. El método de la potencia inversa y de la iteración inversa son desarrollos de esta
idea.
La reducción a las formas conónícas (formas simplificadas tales como la diagonal, la diagonal triple, trian­
gular, de Hessenberg) es posible de muchas maneras. Cuando se efectúan por medio de transformacio­
nes de similitud, los eigenvalores no cambian. El método de Jacobi somete a una matriz simétrica real a
rotaciones con base en la submatriz
y conduce a una forma casi diagonal. El método de Givens emplea rotaciones similares y alcanza una for­
ma diagonal triple en un número finito de pasos. El método QR produce, bajo ciertas circunstancias, una
matriz triangular. La idea fundamental de todos estos procedimientos es que los eigenvalores de las for­
mas conónicas se encuentran con mayor facilidad.
SISTEMAS COMPLEJOS
Muchos de los métodos utilizados para sistemas reales pueden aprovecharse para complejos si se dis­
pone de una computadora con capacidad para aritmética compleja. Si no, los sistemas complejos pueden in­
tercambiarse por sistemas reales equivalentes y más grandes. De tal modo, la comparación de las partes real e
imaginaria de
(A + iB){x + iy) = a + ib
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
551
conduce a
a la cual se aplican nuestros algoritmos reales. El problema de inversión
(A + iB)(C + iD) = I
responde a un tratamiento similar. Los eigenvalores también pueden aproximarse de esta forma.
Problemas resueltos
ELIMINACIÓN GAUSSIANA
26.1
Resuelva por elminación gausiana
Empezamos buscando el coeficiente con valor absoluto mayor en la columna 1. En este caso se en­
cuentra en la parte superior. Si esto no fuera asi, se efectuaría un intercambio de renglones para arreglarlo.
Este elemento más grande se llama primer pivote. Definimos luego
y reducimos a cero los dos coeficientes hacia abajo en la columna de una manera familiar, sustrayendo de
la ecuación i-ésima el producto de /i1 por la primera. Éste es el resultado:
Éste es el primer sistema modificado. El mismo procedimiento se aplica ahora al sistema más pequeño
compuesto de las dos ecuaciones más bajas. Otra vez el coeficiente con el mayor valor absoluto se en­
cuentra ya en la parte superior de la primera columna, por lo que no es necesario el intercambio de renglo­
nes. Encontramos
www.elsolucionario.org
552
MÉTODOS NUMÉRICOS
y asi sustraemos de la tercera ecuación el producto de /32 y la segunda ecuación. El superíndice se refiere
al primer sistema modificado. Tenemos entonces
y el sistema triangular es evidente. El proceso de solución se completa luego mediante la sustitución hacia
atrás, la cual encuentra los componentes xi de abajo hacia arriba, y en orden inverso:
x3 = 30
26.2
x2 = -36
x1
=9
¿Por qué es importante el pivoteo?
Considere el ejemplo extremo:
10-5x1+ x2=1
x1 +x2 = 2
El coeficiente sumamente pequeño hace claro que la solución debe estar bastante cerca de x, = x2 = 1. Supongamos que resolvemos sin pivoteo y con la suposición de que sólo pueden llevarse cuatro lugares decimales. La sustracción exacta produciría la ecuación
(l-105)x2 = 2-105
pero con la restricción en los lugares decimales debemos conformarnos con
105x2=105
que continúa presentándonos x2 = 1. Sin embargo, continuando con la sustitución hacia atrás llegamos a
10-5x1+1=1
haciendo x1= 0 en lugar del 1 pronosticado.
Pero intercambiando después de esto las dos ecuaciones, llevando al coeficiente más grande de la
columna 1 a la posición del pivote:
x1+x2 = 2
10-5x1+x2=1
La sustracción exacta produciría luego
(1-10-5)x2 = 1-2(10-5)
www.elsolucionario.org
con las mismas restricciones redondearían a x2 = 1. Esta vez la sustitución hacia atrás consigue
x1 + 1 = 2
y x1 = 1. El pivoteo ha establecido la diferencia entre la falta de sentido y un resultado perfecto. La experien­
cia con sistemas mucho menos dramáticos ha demostrado que el pivoteo es una parte importante del algo­
ritmo de eliminación. La técnica descrita se denomina pivoteo parcial, puesto que la búsqueda del coeficien­
te más grande se limita a la columna inmediata. El valor de una búsqueda más amplia, en otras columnas,
que lleve al intercambio de columnas, es un asunto que se discute actualmente.
El ejemplo que utilizamos puede aprovecharse para ilustrar otro punto. Multiplicamos la primera ecua­
ción por 105 para obtener
x1 + 105x2 = 105
x1 +
x2 = 2
que hace innecesario el pivoteo. La sustracción usual consigue
(1-105)X2 = 2 - 1 0 5
cuando se efectúa exactamente, pero se vuelve
después del redondeo. Así que x2 = 1. Pero entonces
-105x2
x1
= -10 5
= 105 - 10 =0
y tenemos la "solución" anterior. El punto es que incluso el pivoteo puede no ser útil cuando se presentan
en otra parte coeficientes muy grandes. Una forma de evitar la dificultad sería intercambiar columnas, pero
una alternativa es normalizar cada ecuación, haciendo casi igual el coeficiente con valor absoluto mayor en
cada una. Una forma popular de hacerlo es dividiendo cada ecuación por su coeficiente de mayor tamaño.
La norma de cada ecuación será entonces 1. En nuestro ejemplo regresaríamos, por supuesto, al sistema
original. En resumen, parece ser que la combinación de la normalización y del pivoteo parcial tiene buena
oportunidad de producir un resultado adecuado.
26.3
Resuma el algoritmo de Gauss para un sistema lineal de n por n.
Suponga que se han efectuado k pasos del tipo descrito en el problema 26.1, llevando al sistema a la
Las k ecuaciones superiores están en su forma final, con u11 . . ., ukk los primeros k pivotes. En las restan­
tes n = k ecuaciones los coeficientes llevan el superíndice (k) de este sistema modificado. En seguida bus-
www.elsolucionario.org
554
MÉTODOS NUMÉRICOS
camos el pivote (k + 1) entre los coeficientes xk+1 en las n - k ecuaciones. Será el que tenga el mayor valor
absoluto y su ecuación será intercambiada con la ecuación k + 1. Con este nuevo pivote en su lugar, llamado ahora uk+1,k+1 se encuentra un nuevo conjunto de multiplicadores
y los ceros se arreglan bajo el nuevo pivote restando ecuaciones. Los cambios de coeficientes son gober­
nados por
con k = 0 refiriéndose al sistema original. La parte de la sustitución hacia atrás del algoritmo se representa
por medio de
26.4
¿Cuál es la variación de Gauss-Jordan?
En este caso los ceros se generan tanto arriba como abajo de cada pivote, por sustracciones adicionales. La matriz final es, en consecuencia, diagonal en vez de triangular y la sustitución hacia atrás se elimina. La idea es atractiva, pero implica mayor cálculo que con el algoritmo original y, por ello, se utiliza poco.
26.5
Estime la cantidad de cálculo que se necesita para ejecutar el algoritmo de Gauss en un sistema de n por n.
Considere la reducción de la matriz coeficiente A a la forma triangular. En esto es donde se realiza la
mayor parte de los esfuerzos. En el primer paso, se obtienen (n - 1)2 coeficientes. Limitamos aún más
nuestra atención al conteo de tales coeficientes. En pasos sucesivos este número se reduce y el gran total
será
(n - 1)2 + (n - 2)2 + • • • + 1
coeficientes. Por un resultado bien conocido del álgebra esto es igual a (2n3 - 3n2 + n)/6, de la cual se extrae el término principal n3/3 como una simple medida del tamaño del cálculo. Si n = 100, este número corre
hasta seis cifras.
26.6
Aplique la eliminación gaussiana al siguiente sistema, suponiendo que utilizará para efectuar los cálculos
una computadora capaz de llevar sólo dos dígitos de punto flotante.
Con /21 = .45 y /31 = .67, el arreglo de abajo a la izquierda resume la primera etapa del proceso, y luego
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
555
con /32 = -.17 el arreglo a la derecha muestra la triangulación final.
La sustitución hacia atrás empieza ahora con
si suponemos un acumulador de doble precisión, pero que redondee a 1.0 en cualquier caso. Entonces
y la solución exacta ( 1 , 1 , 1) se ha encontrado a pesar de las severas limitaciones de la computadora. Esto
se debe a que tenemos una matriz muy cooperativa. (Véase también el problema 26.20.)
26.7
¿Cuál es la conexión entre la eliminación gaussiana y factores de la matriz coeficiente?
Forme las matrices L y U de la forma siguiente, empleando los resultados del problema 26.1:
Entonces
Para una prueba general de esta factorización véase el siguiente problema.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
556
26.8
Muestre que si L es una matriz triangular inferior con elementos /ij y /ij = 1, y si U es una matriz triangular superior con elementos uij entonces LU = A.
La prueba implica algún sencillo ejercicio con matrices triangulares. Regresando brevemente al ejemplo de entrada, definimos
y observamos que el producto S1A afecta el paso 1 del algoritmo gaussiano, cuando se aplica en los lados
izquierdo de las ecuaciones, en tanto que S2S1A afecta entonces el paso 2. Esto significa que
S2S1A
A
=
S1-1S2-1U=LU
con LS1-1 S2-1. Note también que
así que se logran las inversiones cambiando los signos de las entradas Iij.
Para el problema general supongamos al principio que no se necesitarán intercambios. Defina matri­
ces
con todos los demás elementos cero. Como en el ejemplo, cada uno de éstos afecta un paso del proceso
de eliminación, haciendo
Esto significa que
Puesto que el producto de matrices triangulares inferiores con todos los elementos de la diagonal iguales a
1 es del mismo tipo que tenemos con nuestra factorización. Además, puesto que cada inversión se logra
cambiando los signos de las entradas /ij éstas ya se encuentran disponibles y pueden multiplicarse para re-
www.elsolucionario.org
557
SISTEMAS DE ECUACIONES LINEALES
descubrir
Supongamos ahora que se han hecho algunos intercambios. Introduzcamos las matrices de intercambio
El producto /ijA tendrá intercambiados los renglones i' y j de A, en tanto que A/ij tiene las columnas corres­
pondientes intercambiadas. El algoritmo de eliminación utiliza ahora una cadena de intercambios lij y opera­
ciones Li, llevando a esta representación:
Ln-1In-1,rn-1Ln-2In-2,rn-2 • • • L1L1,r1A=
U
conde las r¡ son los renglones que contienen los pivotes seleccionados. Esto puede reacomodarse como
con P la matriz de permutaciones que incluye n - 1 intercambios. Suponiendo no singular a A, esto significa
que hay una permutación de renglones tal que PA tiene una factorización LU. La unicidad de esta factorización será evidente de acuerdo con el problema 26.14.
26.9
Resuelva el sistema A,- b suponiendo que se ha realizado una factorización LU.
Tenemos, puesto que L,U y P están a la mano,
Ax = LUx = PAx = Pb
y dejando y = Ux, resolvemos primero Ly = Pb para y. Esto se efectúa con bastante facilidad mediante la
sustitución hacia adelante. Luego Ux ) y se resuelve por sustitución hacia atrás. De modo más especifico, y
con P¡ denotando un elemento de Pb, el sistema Ly = Pb es
www.elsolucionario.org
MÉTODOS NUMÉRICOS
558
con todas la /ij,= 1. La solución por sustitución hacia adelante es claramente y, = P1 y2 = P2 = /21y1, o más ge­
neralmente,
para r = 1 , . . . , n. La sustitución hacia atrás se logra entonces mediante la fórmula del problema 26.3, modificada sólo por la sustitución del vector b' por y:
con i
=n
1. La combinación de la factorización y la sustitución adelante-atrás es en particular útil si el
sistema debe resolverse para más de un vector b.
26.10 ¿Qué es un algoritmo compacto?
Cuando la eliminación gaussiana se efectuó en forma manual, muchos elementos de A se copiaron
muchas veces. En una computadora esto sería equivalente a hacer un uso libre del espacio de almacena­
miento. Con sistemas a gran escala es aconsejable lograr economía tanto en el espacio de almacenamien­
to como en el tiempo de computadora. Por esta razón, se han ideado los algoritmos compactos. Por ejem­
plo, cuando la eliminación avanza, el triángulo inferior de la matriz A se sustituye por ceros. Estas localida­
des de almacenamiento pueden utilizarse mejor para registrar en forma sucesiva los valores /ij,, para j < i. Al
final de la corrida el triángulo superior de A habrá sido entonces sustituido por U, y el triángulo inferior por L
sin su diagonal unitaria. Y no hay necesidad de almacenar todas las matrices de intercambio lij. Basta con
definir inicialmente un vector v con elementos (1, 2, 3 , . . . , n) y en cada paso simplificar el intercambio de
los elementos apropiados. Si, por ejemplo, el primer pivote está en el renglón 3, entonces (3, 2 , 1 , 4
n)
lo registra. No es necesario intercambiar físicamente los renglones, ahorrando así el tiempo que se habría
empleado para dicha maniobra. A partir del vector v final puede construirse la matriz de permutación P si se
desea, o utilizarse la propia v para permutar los elementos del vector b.
26.11 Aplique el procedimiento del problema 26.10 a esta matriz
A=
0
3
2
1
1
0
3
2
2
1
0
3
3
2
1
0
Los cálculos esenciales se presentan en la figura 26-1. En tres pasos la matriz original es sustituida
por un arreglo cuatro por cuatro que contiene toda la información necesaria, excepto por el vector v que in­
dica los intercambios.
En este punto la matriz A ha sido sustituida por una matriz triangular en la factorización LU de PA. El
vector v nos indica que el triángulo será evidente si buscamos en los renglones 2, 3, 4 y 1, en ese orden.
Realmente los elementos sin estrella son el factor U. El factor L también puede leerse tomando los elemen­
tos marcados con estrella en el mismo orden de los renglones. Como para la matriz de permutación P, se
construye colocando unos en las columnas 2, 3, 4 y 1 y ceros en los demás lugares, en la forma siguiente:
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
559
La matriz dada A
V = (1,2,3,4)
Identifique el primer pivote, 3.
Traiga su número de renglón a la primera posición en v. v = (2,1,3,4).
Calcule y almacene la li1 (con asterisco).
Calcule las nueve nuevas entradas por medio de sustracciones (a la derecha de la
línea continua).
Identifique el segundo pivote (columna 2 y derecha de la línea continua).
Traiga su número de renglón a la segunda posición en v(2, 3,1,4).
Calcule las /i2 y almacénelas (con asterisco).
Calcule las nuevas entradas.
Identifique el último pivote (columna 3 y derecha de la línea continua). Traiga su
número de renglón a la tercera posición en v(2, 3,4,1).
Calcule las li3 y almacénelas.
Calcule la única nueva entrada.
Fig. 26-1
Después de esto puede calcularse
y de este modo verificar todos los pasos seguidos.
www.elsolucionario.org
560
26
MÉTODOS NUMÉRICOS
26.12 Utilizando los resultados del problema precedente y dado el vector b con componentes ( 0 , 1 , 2, 3), resuelva
Ax = b.
Empleamos lo que se sugiere en el problema 26.9. Primero ya sea Pb o el vector v reacomodan las
componentes de b en el orden (1, 2, 3, 0). Aunque no es necesario, suponga que desplegamos el sistema
Ly = PB directamente.
La sustitución hacia adelante consigue entonces y
de la que se convierte x -
=
Cambiando a Ux = y, enfrentamos
lo cual puede comprobarse directamente en Ax = b.
26.13 Demuestre el teorema fundamental del álgebra lineal.
Utilizamos el algoritmo de Gauss. Si puede continuarse hasta el final, produciendo un sistema triangu­
lar, entonces la sustitución hacia atrás produciría la solución única. Si todas las bi son cero, esta solución
tiene todas las componentes cero. Esto ya es una parte principal del teorema. Pero supongamos que el al­
goritmo no puede continuarse hasta el final del sistema triangular pronosticado. Esto sucede sólo cuando
en algún punto todos los coeficientes por abajo de cierto nivel son cero. Específicamente, se afirma que el
algoritmo ha alcanzado este punto
www.elsolucionario.org
26
SISTEMAS DE ECUACIONES LINEALES
561
Entonces en un caso homogéneo, donde todas la b son cero, podemos elegir xk+1 hasta xn como queramos
y determinar entonces las otras x,. Pero en el caso general, a menos que b(1)k+1 a b(k)n sean todas cero, no es
posible ninguna solución. Si ocurre que estas b sean cero, otra vez podemos elegir de xk+1 a xn libremente,
después de lo cual se determinan las otras x,. Éste es el contenido del teorema fundamental.
FACTORIZACIONES
26.14 Determine los elementos de las matrices L.y U tales que A = LU mediante una comparación directa de los
elementos correspondientes.
Suponga que ningún intercambio será necesario. Entonces tenemos que igualar los elementos co­
rrespondientes de los dos lados de
que equivales a n2 ecuaciones en n2 incógnitas /ij y uij. La determinación se efectúa del modo siguiente. Pri­
mero multiplicamos el renglón superior de L por todas las columnas de U para obtener
u ij = a1 1j j = 1 , . . . , n
Después multiplicamos los renglones de L (omitiendo el primero) por la columna 1 de U, encontrando li1u11=
ai1,,, de lo que se obtiene ln.
Sigue el turno del segundo renglón de L para multiplicar las columnas de U (omitida la primera). El segundo
renglón de U es entonces
Multiplicamos ahora los renglones de L (omitiendo los primeros dos) por la columna 2 de U. Se cuenta con
todos los elementos implicados, excepto /i2, de modo que resolvemos para éste
Continuando de esta manera recurrente, encontramos alternativamente que los renglones de U son
www.elsolucionario.org
MÉTODOS NUMÉRICOS
562
cada renglón seguido por la columna correspondiente de L.
Este procedimiento se denomina algoritmo de Doolittle.
26.15 ¿Cuál es el algoritmo de Crout?
El algoritmo de Crout produce también una factorización de A, en la forma LU, con U teniendo la
diagonal de unos y L la diagonal general. Las fórmulas para los elementos de los factores pueden encontrarse de manera muy similar a las del problema 26.14, pero es interesante notar que, con D denotando la
matriz de elementos de la diagonal de nuestra U anterior y ceros en otra parte,
A = LU = L(DD-1)U = (LD)(D-1U) = L'U'
así que las dos factorizaciones están estrechamente relacionadas.
26.16 Desarrolle el método de Choleski para factorizar una matriz real, simétrica y definida positiva.
Aquí encontramos factores de la forma
A = LL T
denotando T la transpuesta. El procedimiento es casi idéntico al del problema 26.14, con simetría que nos
permite sólo considerar el triángulo inferior de A, La matriz de Hilbert de orden tres puede servir otra vez como una introducción a pequeña escala
Los elementos de L se encontrarán de la parte superior a la inferior y de izquierda a derecha.
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
563
El cálculo es otra vez recursivo, teniendo cada línea sólo una incógnita.
Debido a la forma en la que se desarrolla el algoritmo, desearemos después de esto extender nuestro
esfuerzo hacia la matriz de Hilbert de orden cuatro, siendo sólo necesario limitar L con un nuevo renglón inferior y una cuarta columna
Encontramos en ese caso
y asi sucesivamente hasta /43 =
Los algoritmos pueden resumirse en las ecuaciones
que se usarán para cada r = 1
n.
ERRORES Y NORMAS
26.17 ¿Qué es un número de condición de una matriz A?
Es una medida de qué tan confiable es la matriz en los cálculos. Para una norma dada, definimos el
número de condición como
y observamos, empleando el problema 1.34, que C(l) = 1, donde / es la matriz identidad. Además, utilizando
el problema 1.38,
asi que la matriz identidad tiene el número de condición más bajo.
www.elsolucionario.org
564
MÉTODOS NUMÉRICOS
26.18 Suponga que el vector b del sistema Ax = b contiene errores de entrada. Estime la influencia de tales
errores en el vector solución x.
Reescriba el sistema como
Axe = b + e
y combine con Ax = b para obtener
A(xe-x) = e
xe-x=A-1e
de lo que resulta, empleando el problema 1.60,
Para convertir esto en una estimación del error relativo, tenemos, de Ax = b,
y finalmente
en la cual aparece el número de condición de A.
Similarmente de
encontramos
brindándonos tanto una cota inferior como una superior del error relativo.
26.19 Suponga que la matriz A del sistema Ax = b contiene errores. Estime la influencia de tales errores en el vec­
tor solución x.
Escriba el sistema como
y combine con Ax = b para obtener
la que conduce a
que estima el error relativo a la solución xe Aquí aparece otra vez el número de condición de A.
En este caso y en el problema anterior se mide cuánto han crecido los errores de entrada.
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
565
También puede encontrarse una estimación relativa a la solución x. Una estimación de este tipo es:
26.20 Vuelva a trabajar el ejemplo de entrada (problema 26.1) bajo la suposición de que se utilizará una com­
putadora que maneja sólo dos dígitos de punto flotante para efectuar los cálculos.
El sistema toma ahora la forma
1.0x1+ .5(x2 + . 33x3 = 1.0
.50x1 + .33x2 + .25x3 = 0
.33x 1 + .25x 2 + .20x3 = 0
y con /21 = .5 y /31 = .33 se convierte rápidamente en
.08x 2 + .09x3 = -.50
.09x 2 + .09x3 = - . 3 3
manteniéndose la primera ecuación como tal. Aquí es posible completar también la triangulación sustrayen­
do simplemente lo que tenemos.
.01x2 = .17
Después de esto la sustitución hacia atrás consigue x2 = 17, x3 = - 2 1 , x1 = -.6, y un vector "solución" (-.6,
17, -21). Comparando con el correcto (9, -36, 30) no vemos ninguna semejanza. El punto es que la matriz
de este sistema es un miembro pequeño de una gran familia, las matrices de Hilbert. Acoplar esto con las
serias limitaciones de nuestra computadora nos ha llevado a un resultado grotesco.
En el problema 26.42 se encontrará que la matriz inversa es
en la cual deben observarse la gran magnitud de los elementos. La norma máxima es 36 + 192 + 180 =
408, lo que hace un número de condición de
Por el problema 26.19 tenemos ahora la estimación
indicando un error relativo de 200 por ciento. Es claro que el cálculo fue ingenuo. Al menos se necesitan
cuatro dígitos.
Como contraste, recuerde las matrices cooperativas del problema 26.6 que permitieron encontrar una
solución exacta incluso con una computadora de dos dígitos. Para esa matriz la norma máxima es 2 y la in-
www.elsolucionario.org
566
MÉTODOS NUMÉRICOS
versa también tiene norma cercana a 2. El número de condición es entonces cercano a 4 y estimamos
o un error máximo de 2 por ciento.
26.21 ¿Cuál es el teorema de la "matriz singular más cercana"?
Suponga que A es no singular y B singular. Entonces, por el teorema fundamental del álgebra lineal,
existe un vector x ≠ 0 que satisface Bx = 0. Para este x
y puesto que x = A-1 Ax, tenemos también
Puesto que A es no singular, cancelamos el factor Ax y tenemos
que es el teorema requerido.
Éste señala que el tamaño de la matriz inversa de A es al menos el recíproco de la "distancia" de A
desde la matriz singular más cercana S. Si A es casi singular, entonces A -1 tendrá una norma grande. Si A
es normalizada, en el sentido ||A|| = 1, el número de condición también será grande.
Como un corolario tenemos el siguiente resultado intuitivo. Si B está "suficientemente cerca" de la ma­
triz no singular A, en el sentido de que 1/||A - B|| es mayor que ||A-1||, entonces B es también no singular.
26.22 Emplee el teorema del problema 26.21 para estimar la condición de la matriz de este sistema, presentado
antes en el problema 1.13.
x1 + X2 = 1
1. 1x 1 + x 2 = 2
El hecho es que A-1 requerida para el número de condición, no siempre es fácil de encontrar con pre­
cisión. Aunque lo anterior no es cierto en este caso, observamos que la matriz de coeficientes es cercana a
la matriz singular
y se encuentra, empleando normas máximas ||A|| = 2.1, ||A = S|| = . 1 , por lo que
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
La matriz error es E
=
567
con norma máxima .01. En consecuencia.
que es nuestra estimación. Para un error de entrada del 1 por ciento pronosticamos un error de salida de 10
por ciento. Este aumento se debe al mal condicionamiento de A, como se mide por C(A).
Resolviendo el sistema directamente, encontramos x = (10, -9) y xe = (11, -10). Esto hace ||x, - x|| =
1 y llXell = 11, para un error relativo de .09. Así que se produce aproximadamente el aumento del 10 por
ciento.
26.24 Muchos cálculos intermedios que se hacen en la solución de un sistema lineal hacen que el error de redon­
deo sea un importante factor. ¿Cómo puede estimarse este error?
El análisis del error hacia atrás ha producido el único éxito real en esta difícil área. Demuestra que el
efecto acumulativo de los redondeos puede estimarse considerando el sistema sustituto (A + B)x = b, don­
de E es una perturbación de A. Después encuentra cotas para los elementos de E. El error en x puede en­
tonces estimarse mediante la fórmula del problema 26.19. Los detalles no son nada triviales pero se han lle­
vado a cabo por completo en la mayor parte de los algoritmos de solución. El desarrollo completo debe
buscarse en la literatura correspondiente, pero un planteamiento simplificado que conduce a la cota parcial­
mente satisfactoria
se presenta en los problemas 26.113 a 26.117, Aquí Δ depende del redondeo unitario y las bi, de los facto­
res calculados L y U de la matriz dada A.
La estimación un poco más profunda
puede ser más fácil de aplicar. Por ejemplo, si A tiene orden 10 (n - 10), y se lleva el equivalente de 8 luga­
res decimales (2-p - 10-8), y estimamos burdamente el valor de diez para este primer factor, encontramos
entonces
lo que indica que tal vez la mitad de los dígitos que se están llevando ya no son significativos. La estima­
ción es, desde luego, conservadora, puesto que ignora el hecho de que los errores se cancelan a menudo
entre sí hasta cierto grado.
26.25 ¿De qué modo se incluye la condición de la matriz coeficiente A en el proceso de estimación del error de
redondeo?
Recordando el problema 26.19, el error relativo de la solución está acotado por
donde E es ahora la perturbación de A debida a los redondeos internos. Para una A normalizada, el error
relativo en x. es consecuentemente el producto de dos factores, la condición de A y la norma de E.
www.elsolucionario.org
568
MÉTODOS NUMÉRICOS
26.26 Si se cuenta con aritmética de doble precisión, ¿en qué medida mejora la situación del redondeo?
Por la fórmula del problema 26.24, si el factor 2-p puede reducirse de 10-8 a 10-16, se ganarán ocho ci­
fras decimales adicionales, lo que con seguridad es una mejora importante. Pero hay un efecto lateral. Un
sistema a gran escala utiliza una gran cantidad de espacio de almacenamiento de computadora, incluso
con precisión sencilla. Duplicar la precisión puede tener un efecto explosivo. Hay un compromiso, similar al
que se describió en el problema 19.48, donde interesaba más calcular el tiempo que el espacio de almace­
namiento. En lugar de hacer y almacenar todo en la doble precisión, limitemos este alto nivel de actividad a
las numerosas evaluaciones de productos internos que impregnan estos algoritmos. Una vez calculados,
sus valores pueden almacenarse en la aritmética de simple precisión, haciendo sólo un redondeo donde pu­
dieron haber sido n. Se necesita únicamente un modesto esfuerzo de programación para incorporar esta
característica, y la recompensa puede ser enorme.
26.27 El residuo de una solución aproximada xe está definido como el vector
r = b - Axe
y brinda la cantidad por la cual cada ecuación del sistema lineal no puede satisfacerse. ¿Cómo se relaciona
el residuo con el error de x.?
Puesto que Ax = b para la solución exacta x, tenemos
y, empleando el problema 1.37,
De Ax = b tenemos de modo similar
por lo que al dividir los elementos correspondientes llegamos al resultado requerido.
El error relativo de x. está acotado por arriba y por abajo por múltiplos del residuo relativo, implicando los
multiplicadores el número de condición de A. Si C(A) es cercano a 1, entonces el error relativo está cerca
del residuo relativo, con el cual, desde luego, ya se cuenta. Sin embargo, si C(A) es grande, hay buenas ra­
zones para sospechar inexactitudes en xe aun cuando r puede ser pequeña. En otras palabras, si A está
mal condicionada, el sistema puede ser casi satisfecho por una x, que contenga un gran error. Desde una
perspectiva optimista, y observando principalmente en la mitad izquierda de la desigualdad anterior, cuando
C(A) es grande, incluso un residuo grande continúa permitiendo que el error x - xe sea pequeño, aunque es
muy seguro que la probabilidad de que esto suceda sea demasiado pequeña.
26.28 ¿Cuál es el método del refinamiento iterativo?
Sea h = x - xe y reescribamos la ecuación A(x - xe) del problema anterior como
Ah = r
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
569
Este sistema tiene la misma matriz coeficiente que el original. Si A se ha factorizado, o los pasos de la eli­
minación gaussiana se han retenido de alguna manera, se resuelve con costo relativamente bajo. Con h a
la mano, se calcula
x = xe + h
y se tiene una nueva y presumiblemente una mejor aproximación a la verdadera solución. Después de esto
pueden calcularse nuevos residuos y repetirse el proceso en tanto sea provechoso. Ésta es la idea del refi­
namiento iterativo. Si se dispone de la aritmética de la doble precisión, ésta es una excelente oportunidad
para usarla.
MÉTODOS I T E R A T I V O S
26.29 Ilustre la iteración de Gauss-Seidel para resolver sistemas lineales empleando el siguiente ejemplo bien
conocido. Un perro está perdido en un laberinto cuadrado de corredores (Fig. 26-2). En cada intersección
selecciona una dirección al azar y avanza a la siguiente intersección, donde otra vez elige al azar y así
sucesivamente. ¿Cuál es la probabilidad de que el perro salga por el lado sur si inicia en la intersección i?
1
2
3
4
5
6
7
8
9
Fig. 26-2
Suponga que hay sólo nueve intersecciones interiores, como se muestra. Dejemos que P1 represente
la probabilidad de que un perro que inicia en la intersección P1 salga al final por el lado sur. Definamos
P2
P9
de manera similar. Asumiendo que al llegar a cada intersección hay la misma probabilidad de
que un perro elija una u otra dirección, y que habiendo alcanzado cualquier salida el recorrido termina, la
teoría de probabilidades ofrece entonces las siguientes nueve ecuaciones para las Pk:
Dejando las ecuaciones en esta forma, elegimos aproximaciones a las Pk. Sería posible hacer una adivinan­
za inteligente en este punto, pero suponga que elegimos los poco inspirados valores iniciales Pk = 0 para to­
do k. Tomando las ecuaciones, en el orden listado calculamos las segundas aproximaciones, una por una.
www.elsolucionario.org
MÉTODOS NUMÉRICOS
570
Primero P, se vuelve cero. Y así sucede con P2, P3
P6. Pero después encontramos
y se tiene ya la segunda aproximación a cada Pk. Observe que en el cálculo de P8 y P9, se han utilizado las
nuevas aproximaciones a P7 y P8 respectivamente. Parece no ser adecuado utilizar aproximaciones más
antiguas. El procedimiento conduce a los resultados correctos en forma más rápida. Las aproximaciones
subsiguientes se encuentran después de esto de la misma manera, y la iteración continúa hasta que no
ocurren más cambios en los lugares decimales requeridos. Trabajando hasta tres lugares, se obtienen los
resultados de la tabla 26.1. Note que P5 viene a ser .250, lo que significa que una cuarta parte de los perros
en el centro deben salir por el lado sur. De acuerdo con la simetría esto tiene sentido. Los nueve valores
pueden sustituirse otra vez en las ecuaciones originales como una comprobación adicional, para ver si los
residuos son pequeños.
Tabla 26.1
P6
Iteración
P1
P2
P3
P4
P5
0
1
2
3
4
5
6
7
8
9
10
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
.016
.032
.048
.058
.065
.068
.070
.071
.024
.053
.072
.085
.092
.095
.097
.098
.027
.045
.058
.065
.068
.070
.071
.071
.062
.106
.140
.161
.174
.181
.184
.186
.187
.078
.152
.196
.223
.236
.244
.247
.249
.250
.082
.127
.160
.174
.181
.184
.186
.187
.187
P7
P8
P9
0
0
0
.250
.328
.375
.401
.415
.422
.425
.427
.428
.428
.312
.394
.464
.328
.328
.398
.415
.422
.425
.427
.499
.513
.520
.524
.525
.526
.526
.428
.428
.428
En este ejemplo del método de Gauss-Seidel cada una de las nueve ecuaciones viene a nosotros en
la forma
Pi= . . .
y se utiliza para actualizar la aproximación a Pi usando los valores más recientes de la otras componentes.
Vale la pena notar que en cada ecuación la incógnita del lado izquierdo tiene el coeficiente dominante.
26.30 Desarrolle el método de Gauss-Seidel para un sistema lineal general.
El algoritmo se aplica con mayor frecuencia a sistemas Ax = b para los cuales los elementos de la diagonal de A son dominantes. En cualquier caso, deben hacerse arreglos mediante intercambios de renglones y columnas para que los elementos mayores se ubiquen a lo largo de la diagonal, al grado que esto sea
posible. La ecuación /-ésima del sistema se resuelve luego para xi en términos de las otras incógnitas. Si
empleamos el símbolo xi(k) para representar la aproximación k-ésima a xi, entonces el algoritmo prosigue co-
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
571
mo en el ejemplo.
el superíndice (0) denotando una aproximación inicial. Tenemos de modo más general para la aproximación
k-ésima a x¡
en la cual la primera suma utiliza las aproximaciones Pésimas a x, teniendo j < i, en tanto que la segunda
las aproximaciones (k - 1) ax¡ con j > i. Aquí /' = 1 n y k = 1 , . . .
26.31 Exprese el algoritmo de Gauss-Seidel en forma de matriz.
Primero la matriz A se descompone en
A=L+D+U
donde L y U son las matrices triangulares superior e inferior con elementos cero sobre la diagonal. La fórmula
general para el problema 26.30 puede entonces escribirse como
x(k)
=
D-1(b-Lx(k)-Ux(k-1))
que puede resolverse para x(k). Primero
(/ + D-1L)x(k) = D-1b - D-1Ux(k-1)
que lleva a
o
x(k)
= (/ + D-1L)-1(D-1b - D-1Ux(k-1))
x ( k ) = - ( D + L)-1Ux(k-1) + (D + L)-1b
26.32 ¿Qué es una iteración de matriz estacionaria?
Una iteración de matriz de la forma
x(k) = M k x (k-1) + Ckb
se llama estacionaria si Mk y Ck son independientes de k. La iteración se vuelve luego
x(k) = Mx(k-1) + Cb
www.elsolucionario.org
El método de Gauss-Seidei es estacionario, con estas M y C
M=-(D +
L) -1 U
C = (D+L)-1
26.33 Analice la convergencia de las iteraciones de matrices.
Primero pedimos que la solución exacta de Ax - b sea un punto fijo de la iteración. Esto es, sustitui­
mos x = A-1b tanto para las aproximaciones de entrada como de salida en
x(k) = Mkx(k-1) + Ckb
y tenemos
x=A
-1
b = MkA-1b + Ckb = Mkx + Ckb
Esto se cumple para todos los vectores b, así que igualamos los coeficientes
A-1 = MkA-1 + Ck
I = Mk + C k A
Definimos ahora e(k) como el error de la aproximación k-ésima
Entonces
e (k)
(k-1)
(k-1)
x -k(x-x
M k x(k-1)
== M
) -=CM
)
kbk e
que muestra que las matrices Mk son las que controlan el comportamiento del error. Empleando este resultado repetidamente,
e(k) = MkMk-1• • •M1e(0)
donde e(0) es el error inicial. En una iteración estacionaria esto se vuelve
e(k) = Mke(0)
26.34 Pruebe que la iteración de Gauss-Seidel converge para un vector inicial arbitrario x(0), si la matriz A es
definida positiva y simétrica.
Debido a la simetría, A = L + D + LT, lo que produce
M = -(D + L ) - 1 L T
Si λ y v son un eigenvalor y un eigenvector de M, entonces
(D + L)-1Ltv = -λv
LTv = -λ(D + L)v
Premultiplicando por la transpuesta conjugada de v (denotada v*)
v*LTv = -v*λ(D + L)v
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
573
y sumando luego v*(D + L)v en ambos lados
puesto que A = L + D + LT. Pero la transpuesta conjugada de v*Av es v*Av, así que lo mismo debe cumplir­
se para el lado derecho de esta última ecuación. De tal modo, con denotando la conjugada de λ,
(1 - λ)v*(D + L)Tv = (1 - λ)v*(D + L)v
= (l-λ)(v*Dv + v*Lv)
= (l-λ)(v*Dv-λv*(D+L)Tv)
Combinando términos
(1 - |k| 2 )v*(D + L) T v = (1 - λ)v*Dv
multiplicando ambos lados por (1 - λ), y haciendo un poco de álgebra tenemos finalmente
(l-|λ| 2 )v*Av = |l-λ| 2 v*Dv
Pero tanto v*Av como v*Dv son no negativas y X no puede ser 1 (puesto que esto conduciría otra vez a
Av =0), por lo que
|λ|2<1
colocando todos los eigenvalores dentro del círculo unitario y garantizando que lím Mk = 0. En consecuen­
cia, e(k) tiene límite cero para cualquier e(0).
26.35 ¿Cómo puede aplicarse un método de aceleración a la iteración de Gauss-Seidel?
Puesto que e(k) = Me(k-1), anticipamos que los errores pueden disminuir a una tasa constante, de modo
muy similar al caso del problema 25.4. Por sí sola se sugiere la idea de la extrapolación al límite. En este
caso tomaría la forma
para i = 1 , . . . , n. Los superíndices denotan tres aproximaciones sucesivas.
Por ejemplo, empleando la columna central de la tabla 26.1, en la cual sabemos que el valor correcto
es .250, los errores en los renglones 4 y 8 son 54, 27, 14, 6 y 3 en el tercer lugar decimal. Esto se acerca
mucho a una reducción uniforme a la mitad. Suponga que intentamos la extrapolación al límite empleando
las tres entradas de abajo, junto con las correspondientes diferencias como se dan.
.196
.027
.223
-.014
.013
Encontramos
.236
www.elsolucionario.org
574
MÉTODOS NUMÉRICOS
que está en la dirección correcta si no especialmente dramático.
26.36 ¿Cuáles son los métodos de relajación y sobrerrelajación?
La idea central es utilizar residuos como indicadores de qué tan correctas son las aproximaciones que
se disponen. Por ejemplo, la iteración
x(k)=
X(K-1)
+ (b-AX(K-1))
tiene el carácter de un método de relajación. Se ha encontrado que puede acelerarse la convergencia dan­
do un peso extra al residuo, conduciendo a fórmulas de sobrerrelajación tales como
con w > 1. Otras variaciones de la idea también se han utilizado.
26.37 Adapte el método de sobrerrelajación para acelerar la convergencia de Gauss-Seidel.
La adaptación natural es
x(k)
=x(k-1)
+
w[b-Lx(k)-(D+U)x(k-1)]
con A = L + D + U como antes. Tomamos W = 1.2, x(0) = 0, e intentamos una vez más el problema del perro
en el laberinto. Encontramos ceros generados como antes hasta
Las aproximaciones subsiguientes se encuentran de la misma manera y se listan en la tabla 26.2. Note que
ahora se necesitan la mitad de iteraciones.
Tabla 26.2
Iteración
P1
P2
P3
0
1
2
3
4
5
6
0
0
0
0
0
0
0
0
0
.028
.054
.073
.071
.052
.096
.098
.098
.066
.071
.071
.071
P4
P5
P6
0
0
0
0
0
0
.090
.149
.183
.188
.187
.144
.234
.247
.251
.250
.169
.182
.187
.187
.187
www.elsolucionario.org
P7
P8
P9
0
0
0
.300
.384
.420
.427
.428
.428
.390
.506
.520
.526
.527
.526
.418
.419
.427
.428
.428
.428
SISTEMAS DE ECUACIONES LINEALES
575
INVERSIÓN DE MATRICES
26.38 Extienda el algoritmo de eliminación de Gauss para producir la inversa de la matriz coeficiente A, esto es,
A-1 tal que AA-1= I.
Tomando otra vez el sistema del problema 26.1, tratamos simplemente tres vectores simultáneamen­
te. El punto de inicio es el arreglo
del cual la mitad izquierda es A y la mitad derecha /. El primer paso gaussiano conduce ahora a este nuevo
arreglo
Aquí el método se modifica ligeramente reduciendo el siguiente pivote a 1, lográndolo mediante una multi­
plicación por 12.
El segundo paso se ha efectuado también para triangulizar el sistema. En este punto podría utilizarse la
sustitución hacia atrás para resolver tres sistemas independientes, incluyendo cada uno de ellos uno de los
últimos tres vectores de columna. Sin embargo, en vez de ello extendemos el segundo paso gaussiano.
Continuando con el segundo renglón como renglón pivote, restamos la mitad de él del renglón 1 para crear
un cero más:
www.elsolucionario.org
576
MÉTODOS NUMÉRICOS
El tercer paso gaussiano sigue luego, después de reducir el último pivote a 1. El propósito de este paso es
crear ceros sobre el nuevo pivote. Se llega entonces al último arreglo
1 0
0
9 - 3 6
0
1
0-36
0
0
1
30
30
192
-180
-180
180
Puesto que en realidad tenemos resueltos tres sistemas lineales de la forma Ax = b, con vectores bT = (1, 0,
0), (0, 1, 0), y (0, 0, 1) respectivamente es claro que las últimas tres columnas contienen ahora A1-1. El arreglo original fue (A, /). El arreglo final es (/, A-1). El mismo proceso puede aplicarse a otras matrices A, efectuándose intercambios de renglón o columna si se requiere. Si se efectúan tales intercambios, deben restituirse a la terminación del algoritmo.
26.39 Suponiendo que la matriz se ha factorizado como A = LU, ¿cómo puede encontrarse A-1 a partir de los factores?
Puesto que A-1 = U-1L-1 la cuestión se relaciona con la inversión de matrices triangulares. Considere
L y busque una inversa en la misma forma
= LL-1 = I
La validez de la suposición será clara conforme avancemos. Después de esto igualemos los elementos de
los dos lados, como en el algoritmo de factorización de Choleski, de la parte superior a la inferior y de iz­
quierda a derecha. Encontramos
l 21 + c21 = 0
l31 + I12C21 + c31 = 0
l32 + c 32 = 0
l41 + l42c21 + l43c31 + C41 = 0
l42 + l43c32 + c42 = 0
l43 + c43 = 0
c21 = -l21
c31 = -(l31 + l32c21)
c32 = -l32
c41 = - (l41 + l42c21 + l43c3l)
c42 = - (l42 + l43c32)
c43 = -l43
Los elementos se determinan en forma recursiva, siendo la fórmula general
Todos los elementos de la diagonal son 1.
La inversión de U es similar. Suponiendo que la inversa será una matriz triangular superior, con ele-
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
577
mentos dij procedemos de la parte inferior a la superior y de derecha a izquierda, encontrando
y
26.40 Aplique el método del problema anterior a la matriz del problema 26.11.
En ese problema la factorización
se realizó. Aplicando las recurrencias anteriores, tenemos
a partir de lo cual se convierte a la larga en
Para producir la A-1 final, utilizamos A-1 = (PA)-1P y recordamos que la multiplicación posterior mediante una
matriz de permutación P reacomoda las columnas. Haciendo referencia otra vez al problema anterior, se
encuentra que las columnas anteriores deben tomarse en el orden 4 , 1 , 2, 3.
26.41 Deduzca la fórmula para efectuar un paso de intercambio en un sistema lineal.
Dejemos que el sistema sea Ax = b, o
www.elsolucionario.org
MÉTODOS NUMÉRICOS
578
Los ingredientes esenciales pueden desplegarse como en el siguiente arreglo para n = 3.
x1
x2
x3
Procedemos a intercambiar una de las variables "dependientes" (digamos b2) con una de las variables inde­
pendientes (x3 por ejemplo). Resolviendo la segunda ecuación para x3, x3 = (b2 - a21 x1 = 822 x2)la23. Esto re­
quiere que el coeficiente pivote a23 no sea cero. La sustitución de la expresión para x3 en las dos ecuacio­
nes restantes produce
El arreglo para el nuevo sistema, después del intercambio, es como sigue
Esto puede resumirse en cuatro reglas:
1.
El coeficiente pivote es sustituido por su recíproco.
2.
El resto de la columna pivote se divide entre el coeficiente pivote.
3.
El resto del renglón pivote se divide entre el coeficiente pivote con un cambio de signo.
4.
Cualquier otro coeficiente (digamos alm) se sustituye por
26.42 Ilustre el método de intercambio para encontrar la matriz inversa.
Tomamos otra vez la matriz del problema 26.1.
www.elsolucionario.org
donde aik es el coeficiente pivote.
SISTEMAS DE ECUACIONES LINEALES
579
Para el control del error se acostumbra elegir el coeficiente más grande para el pivote, en este caso 1. Inter­
cambiando b1 y x1, tenemos este nuevo arreglo:
b1 x2
x3
Dos intercambios similares de b3 y x3, luego de b2 y x2, llevan a los dos arreglos que se muestran a conti­
nuación. En cada caso el coeficiente más grande en un renglón b y en una columna x se usa como pivote.
b1
x2
b1
b3
b2
b3
Puesto que lo que hemos hecho es intercambiar el sistema b = Ax por el sistema x = A-1b, la última matriz
es A-1
26.43 Obtenga la fórmula A-1 = (/ + R + R2 + • • • )B donde R=I-BA.
La idea aquí es que B es una inversa aproximada de A, asi que el residuo R tiene elementos peque­
ños. Unos cuantos términos de la serie involucrada pueden, por tanto, ser suficientes para producir una mu­
cho mejor aproximación a A-1 Para deducir la fórmula note primero que (/ - R)(l + R + R2 + • • •) = / siempre
que la serie de matrices sea convergente. Entonces / + R + R2+ • • • - ( / - R)-1 y asi
(/ + R + R2 + • • • )B =
(l-
R)-1B=
(BA)-1B
= A-1B-1B
que se reduce a A-1
26.44 Aplique la fórmula del problema precedente a la matriz
suponiendo que sólo se dispone de una computadora de tres dígitos. Puesto que cualquier computadora
lleva únicamente un número limitado de dígitos, esto ilustrará otra vez la capacidad de un método de co­
rrecciones sucesivas.
www.elsolucionario.org
580
MÉTODOS NUMÉRICOS
Primero aplicamos la eliminación gaussiana para obtener una primera aproximación a la inversa. Los
tres pasos, empleando el pivote disponible más grande en cada caso, aparecen abajo junto con la inversa
aproximada B que resulta de los dos intercambios de renglones, llevando el renglón inferior a la parte superior.
.1
2.0
2.7
1
0
0
0 1
0
0
0
1
1
0
0
0
.1
.1
1.0
0
1.7 - . 3
Paso 1
1
0
.143
-.854
.427
.143
-3.85
2.43
0
0
0
0
1
1
0
1 0
.037
-.260
.630
R = / - BA =
0
1
0
-.0371
-.742
.371
.427
2.43
-1.43
.143
.143
-.143
-.854 -3.85
2.85 .
La matriz B
-.143
2.85
-1.43
Paso 3
En seguida calculamos con facilidad
.111
.222
-.111
Paso 2
.003
.020 .003
0
-.001
0
.004 -.010 .004
después de lo cual RB, B + RB, R2B = R(RB), y B + RB + R2B se encuentran en ese orden. (Observe que
debido a que los elementos en R2B son tan pequeños, se ha incluido un factor de 10 000 por simplicidad en
la presentación.)
.001580
-.000143
-.003140
-.07540
.00143
-.04810
-.001400
-.000143
-.007110
RB
.001400
.000143
.007110
-.28400
.28400
.00143 - . 0 0 1 4 3
-.32600
.32600
104 • R(RB)
.428579
2.428600
.142857
.142857
-.857138 -3.857110
B+RB
-1.428600
-.142857
2.857110
.4285715
2.4285716 -1.4285716
.1428571
.1428571
-.1428571
-.8571428 -3.8571426
2.8571426
B + RB+ R2B
Note que excepto en los procesos aditivos, se han llevado sólo tres dígitos significativos. Puesto que la inversa exacta es
3
17
1
1
- 6 -27
-10
-1
20
y puede verificarse que 6 + RB + R2B está incorrecto sólo en el séptimo lugar decimal. Más términos de la
fórmula de la serie producirían aún mayor precisión. Este método puede emplearse con frecuencia para
mejorar el resultado de la inversión por eliminación gaussiana, puesto que el algoritmo es bastante más
sensible que la acumulación del error de redondeo.
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
581
DETERMINANTES
26.45 Los determinantes ya no se usan en forma extensiva en la solución de sistemas lineales, pero siguen
teniendo aplicación de otras maneras. La evaluación directa de un determinante de orden n requeriría el
cálculo de n\ términos, lo que es prohibitivo, excepto para n pequeña. ¿Cuál es la alternativa?
De las propiedades de los determinantes, ningún paso en la eliminación gaussiana altera el determi­
nante de la matriz coeficiente excepto la normalización y los intercambios. Si éstos no se llevaron a cabo, el
determinante se obtiene por la multiplicación de los elementos de la diagonal después de la triangulación.
Para la matriz del problema 26.1 el determinante es, por tanto,
Este pequeño valor es otra in­
dicación del carácter problemático de la matriz.
Los determinantes pueden encontrarse también a partir de la factorización PA = LU. Puesto que A P-1LU tenemos
det (A) = det (P-1) det (L) det (U) = (-1) p det (U)
donde p es el número de intercambios representado por la matriz de permutación P, o P-1Para la matriz
del problema 26.11
en tanto que se encuentra con facilidad que det (P) es - 1 . (O recuerde que los tres intercambios se realiza­
ron durante la factorización, haciendo p = 3.) De este modo
det (A) =-96
PROBLEMAS DE EIGENVALORES, EL POLINOMIO CARACTERÍSTICO
26.46 ¿Cuáles son los eigenvalores y los eigenvectores de la matriz A?
Un número λ para el cual el sistema Ax = λx o (A - λl)x = 0 tiene un vector solución x diferente de ce­
ro se llama un eigenvalor del sistema. Cualquier vector solución diferente de cero correspondiente se deno­
mina un eigenvector. Claramente, si x es un eigenvector entonces también lo es Cx para cualquier número C.
26.47 Encuentre los eigenvalores y los eigenvectores del sistema
(2-λ)x1
x2
=0
-x1 + (2 - λ)x2
x3 = 0
-x2 + (2 - λ)x3 = 0
el cual aparece en diversos medios físicos, entre los que se incluye la vibración de un sistema de tres
masas conectadas por resortes.
Ilustraremos el método para determinar el polinomio característico directamente y obtener después
los eigenvalores como raíces de este polinomio. Los eigenvectores se encuentran después de esto. El pri­
mer paso es tomar combinaciones lineales de ecuaciones como en la eliminación gaussiana, hasta que só­
lo la columna x3 de los coeficientes incluya a λ. Por ejemplo, si E1 E2 y E3 denotan tres ecuaciones, enton­
ces -E2 + λE3 es la ecuación
x1 - 2x2 + (1 + 2λ - λ2)x3 = 0
www.elsolucionario.org
MÉTODOS NUMÉRICOS
582
Llamando E4 a esta ecuación, la combinación E1 - 2E2 + λE4 se vuelve
4x1 - 5x2 + (2 + λ + 2λ2 - λ3)x3 = 0
Estas dos últimas ecuaciones junto con E3 incluyen ahora a λ sólo en los coeficientes x3.
El segundo paso del proceso es triangulizar este sistema mediante el algoritmo de eliminación gaussiana o su equivalente. Con este pequeño sistema podemos tomarnos algunas libertades en cuanto a los
pivotes, manteniendo
x 1 -2x 2 + (1 + 2 λ - λ 2 ) x 3 = 0
-x2+
(2-λ)x3 = 0
como nuestras dos primeras ecuaciones y logramos rápidamente
(4-10λ + 6λ 2 -λ)x 3 = 0
para completar la triangulación. Para satisfacer la última ecuación debemos evitar hacer x3 = 0, porque esto
de inmediato obliga a x2 = x1 = 0 y no tenemos un vector solución diferente de cero. Por consiguiente, debe­
mos requerir
4 - l0λ + 6λ 2 - λ 3 = 0
Esta expresión cúbica es el polinomio característico, y los eigenvalores deben ser sus ceros puesto que no
hay otra manera con la que podamos obtener un vector solución diferente de cero. Mediante métodos de un
capítulo anterior encontramos que esos eigenvalores son λ 1 = 2 - λ 1 - 2 , λ3 = 2 +
en orden cre- ciente.
El último paso es encontrar los eigenvectores, pero con el sistema ya triangularizado esto no implica
más que una sustitución hacia atrás. Tomando λ1 primero, y recordando que los eigenvectores se determi­
nan sólo hasta un multiplicador, de manera que podemos elegir x3 =1, encontramos x2 = y luego x, = 1.
Los otros eigenvectores se encuentran de la misma manera, empleando λ2 y λ3. Los resultados finales son
En este caso el sistema original de tres ecuaciones tiene tres distintos eigenvalores, para cada uno de los
cuales corresponde un eigenvector independiente. Ésta es la más simple, aunque no la única, consecuen­
cia de un problema de eigenvalores. Debe notarse que la matriz presente es tanto real como simétrica. Pa­
ra una matriz n x n real y simétrica un teorema importante del álgebra establece que
a)
Todos los eigenvalores son reales, aunque quizá no distintos.
b)
Siempre existen n eigenvectores independientes.
Esto no es cierto para todas las matrices. Es una fortuna que muchos de los problemas de matrices con los
que las computadoras deben enfrentarse son reales y simétricos.
www.elsolucionario.org
SISTEMAS OE ECUACIONES LINEALES
583
26.48 Para hacer más claro el algoritmo con el que se calcula de manera directa el polinomio característico,
aplíquelo en este sistema más grande:
E1:
E2:
E3:
E4:
Llamando a estas ecuaciones E1 E2, E3, E4, la combinación E1 + 4E2 + 10E3 + λE4 es
15x1 + 39x2 + 73x3 + (117 + 20λ - λ2)x4 = 0
y es nuestra segunda ecuación en la cual todos los términos excepto el x4 están libres de λ. Iniciamos de in­
mediato la triangulación sustrayendo 15E4 para obtener
E5:
-21x 2 - 77x3 + (-183 + 35λ - λ2)x4 = 0
La combinación -21E2 - 77E3 + λE5 se vuelve
-98x 1 - 273x2 - 525x3 + (-854 - 183λ + 35λ2 - λ3)x4 = 0
y es nuestra tercera ecuación en la que todos los términos excepto el x4 están libres de λ. La triangulación
continúa mezclando esta última ecuación con E4 y E5 para obtener
E6:
392x3 + (1449 - 1736λ + 616λ2 - 21λ3)x4 = 0
Después de esto se forma la combinación 392E3 + λE6,
392x1 + 1176x2 + 2352x3 + (3920 + 1449λ - 1736λ2 + 616λ3 - 21λ4)x4 = 0
y la triangulación se completa mezclando esta ecuación con E4, E5 y E6 para obtener
( l - 2 9 λ + 72λ 2 -29λ 3 + λ4)x4 = 0
E7:
El sistema E4, E5, E6, E7 es ahora el sistema triangular al que hemos estado aspirando. Para evitar el vector
solución cero, λ debe ser un cero de 1 - 29λ + 72λ2 - 29λ3 + λ4 que es el polinomio característico. La bús­
queda de estos ceros y de tos correspondientes eigenvectores se dejará como un problema. La rutina que
acaba de utilizarse puede generalizarse para sistemas más grandes.
26.49 Ilustre el empleo del teorema de Cayley-Hamilton para encontrar la ecuación característica de una matriz.
Escribiendo la ecuación como
f(λ) = λn +. c1λn-1 + • • • + cn-1λ + cn = 0
el teorema de Cayley-Hamilton establece que la propia matriz satisface esta ecuación. Esto es,
f(A) = An + c1An-1 + • • • + cn-1A + cnI = 0
www.elsolucionario.org
MÉTODOS NUMÉRICOS
donde el lado derecho es ahora la matriz cero. Esto se convierte en n2 ecuaciones para π coeficientes cij
por lo que hay una redundancia sustancial.
. Puesto que F2 -
Tome, por ejemplo, la matriz de Fibonacci F -
O
tenemos
2 + c 1 +c 2 = 0
l+
c 1 =0
l + c2 = 0
con la segunda de éstas repetidas. Se dispone otra vez de la ecuación familiar λ2 = λ + 1. (Véanse los pro­
blemas 18.24 y 26.128.)
O considere la matriz de permutación P con
0
O 1
1
O O
O 1 O
0 1 0
0 0 1
O 1 O
1
O O
O O 1
c1
=
1 O O
que conduce rápidamente al conjunto
1 + c3 =
0
0
c2 = 0
3
que repite dos ecuaciones. La ecuación característica es λ - 1 = 0 .
Se han sugerido varios artificios para seleccionar un subconjunto apropiado de las n2 ecuaciones dis­
ponibles. Uno de tales artificios requiere calcular
f(A)v=0
para un vector apropiado v, y resolver este sistema.
26.50 Demuestre el teorema de Gerschgorin, el cual establece que todo eigenvalor de una matriz cae dentro de
uno de los círculos complejos que tienen centros en aii y radios
con i = 1
n.
Sea xi la componente de mayor magnitud de uno de los eigenvectores de A. De la i-ésima ecuación
del sistema (A - λ/)x = 0, tenemos
que es el teorema.
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
585
26.51 ¿Qué nos dice el teorema de Gerschgorin acerca de los eigenvalores de una matriz de permutación que
tiene un solo 1 en cada renglón y columna, con ceros en otra parte?
Los circuitos tienen ya sea centro en 0 con radio 1 o centro en 1 con radio 0. Todos los eigenvalores
yacen dentro de una unidad desde el origen. Por ejemplo, los eigenvalores de
0
1
0
0 1
0 0
1 0
son las raices cúbicas de 1. En particular, los eigenvalores de la matriz identidad deben estar dentro del
círculo que tiene centro en 1 y radio 0.
26.52 El teorema de Gerschgorin es en especial útil para matrices que tienen una diagonal dominante. Aplíquelo a
la matriz:
4 - 1 - 1
-1
4 -1
-1 -1
4
0 - 1 - 1
0
-1
-1
4
Todos los eigenvalores deben caer dentro del círculo con centro en 4 y radio 3. Por la simetría, deben
ser también reales.
EL MÉTODO DE POTENCIAS
26.53 ¿Cuál es el método de potencia para la generación del eigenvalor y el eigenvβctor dominantes de una
matriz?
Suponga que la matriz A es de tamaño n x n con n eigenvectores independientes V1, V2,..., Vn y un
eigenvalor verdaderamente dominante λi: |λ1| > |λ2| > • • • > |λn|. Entonces un vector V puede expresarse co­
mo una combinación de eigenvectores.
V = a1V1 + a2V2 + • • • + anVn
Resulta que
Al continuar con la multiplicación por A llegamos a
siempre que a, ≠ 0. Puesto que λ, es dominante, todos los términos dentro del paréntesis tienen límite cero
excepto el primer término. Si tomamos el cociente de cualquiera componentes correspondientes de Ap+1 y
APV, este cociente debe tener consecuentemente limite λ,. Además, λ-pApV convergerá al eigenvector a. V1.
www.elsolucionario.org
586
MÉTODOS NUMÉRICOS
26.54 Aplique el método de potencia para encontrar el eigenvector y el eigenvalor dominantes de la matriz
utilizada en el problema 26.47.
Elija el vector inicial V = (1, 1, 1). Entonces AV = (1, 0, 1) y A2V = (2, - 2 , 2). Es conveniente dividir
aquí entre 2, y en el futuro continuaremos dividiendo entre algún factor adecuado para mantener los núme­
ros razonables. En esta forma encontramos
A7V = c(99, -140, 99)
A8V = c(338, -478 338)
donde c es algún factor. Los cocientes de las componentes son
y nos encontramos cerca del valor correcto λ, = 2 + = 3.414214. Dividiendo nuestro último vector de sali­
da entre 338, se convierte en (1, -1.41420, 1) aproximadamente y éste se encuentra cerca del correcto (1,
1) que se encontró en el problema 26.47.
26.55 ¿Cuál es el cociente de Rayleigh y cómo puede utilizarse para encontrar el eigenvalor dominante?
El cociente de Rayleigh es xTAx/xTx, donde T denota la transpuesta. Si Ax = λx, dicho cociente se re­
duce a λ. Si Ax = λx, entonces es concebible que el cociente de Rayleigh sea aproximadamente λ. Bajo
ciertas circunstancias los cocientes de Rayleigh para los vectores sucesivos generados por el método de
potencias converge a λ,. Por ejemplo, sea x el último vector de salida del problema precedente (1,1.41420,
1). Entonces
Ax = (3.41420, -4.82840, 3.41420)
xTAx = 13.65672
xTx = 3.99996
y el cociente de Rayleigh es 3.414214 aproximadamente. Éste es correcto hasta seis lugares decimales, in­
dicando que la convergencia a λ, es más rápida en este caso que para cocientes de componentes.
26.56 Suponiendo que todos los eigenvalores son reales, ¿cómo puede encontrarse otro eigenvalor extremo?
Si Ax - λx, entonces (A - ql)x = (λ - q)x. Esto significa que λ - q es un eigenvalor de A = ql. Eligiendo
q en forma adecuada, quizá q = λ1, producimos el otro eigenvalor dominante extremo y puede aplicarse el
método de potencias. Para la matriz del problema 26.55 podemos elegir q = 4 y considerar
A-41 =
-2
-1 0
-1 -2 -1
0 -1
-2
Tomando otra vez V = (1, 1, 1) encontramos rápidamente el cociente de Rayleigh -3.414214 para el vector
(1,1.41421, 1), que es en esencia (A - 4I)8V. Sumando 4 tenemos .585786 que es el otro eigenvalor extre­
mo 2 correcto hasta seis lugares. El vector es también cercano a (1,
1), el eigenvector correcto.
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
587
26.57 ¿Cómo puede encontrarse el eigenvalor más pequeño absolutamente por medio del eigenvector correcto?
Si Ax = λx, A-1X = λ-1x, esto significa que el eigenvalor absolutamente más pequeño de A puede encontrar­
se como el recíproco de la λ dominante de A-1. Para la matriz del problema 26.55 encontramos primero
3 2 1
2 4 2
1 2 3
Eligiendo otra vez V = (1,1,1) pero usando ahora A-1 en lugar de A, rápidamente encontramos el cociente
de Rayleigh 1.707107 para el vector (1,1.41418,1). El cociente recíproco es .585786 así que tenemos otra
vez este eigenvalor y el vector que ya encontramos en los problemas 26.47 y 26.56. Determinar A-1 no es
comúnmente una tarea sencilla, pero este método es, en ocasiones, la mejor aproximación al eigenvalor
más pequeño.
26.58 ¿Cómo puede determinarse el siguiente eigenvalor dominante mediante una elección adecuada del vector
inicial V?
Se han propuesto varios algoritmos, con diferentes grados de éxito. La dificultad es apartar el propio
eigenvalor dominante y mantenerlo apartado. Los errores de redondeo han deteriorado varios métodos teó­
ricamente exitosos regresando el eigenvalor dominante a la linea principal de la computación y oscurecien­
do el siguiente eigenvalor dominante, o limitando la precisión a la cual puede determinarse. Por ejemplo,
suponga que el argumento del problema 26.53 podría arreglarse de modo que el vector inicial V sea tal que
a, es cero. Entonces λ, y V, realmente nunca aparecen, y si λ2 domina los restantes eigenvalores ella asu­
me el papel desempeñado antes por λ, y el mismo razonamiento confirma la convergencia a λ2 y V2. Con
nuestra matriz del problema 26.54, esto puede ilustrarse bastante bien. Siendo real y simétrica, esta matriz
tiene la propiedad de que sus eigenvectores son ortogonales. (El problema 26.47 permite una rápida verifi­
cación de lo anterior.) Esto significa que Vt1V = a1VT1V1 por lo que a, será cero si V es ortogonal a V1 De in­
mediato encontramos AV = (-2, 0, 2) = 2V, así que tenemos el valor exacto de λ2 = 2 y V2 = ( - 1 , 0, 1). Sin
embargo, nuestra elección del vector inicial en este caso fue afortunada.
Es un poco entretenido ver qué sucede con un vector V razonable pero no afortunado, digamos V =
(0, 1, 1.4142) que es casi ortogonal a V1 como se requiere. En tal caso encontramos rápidamente A3V =
4.8(-1, .04, 1.20) que es algo similar a V2 y a partir del cual el cociente de Rayleigh produce el valor satis­
factorio λ2 = 1.996. Sin embargo, después de esto el cómputo se deteriora y al final llega a ser A20V=
c(1, -1.419, 1.007) que otra vez ofrece buenas aproximaciones a λ1 y V1. Los errores de redondeo han
vuelto a poner en acción al eigenvalor dominante. Enfrentando el problema de alterar cada vector Apv ligera­
mente, para hacerlo ortogonal a V1, puede lograrse un mucho mejor resultado. Se han intentado también
otros artificios empleando diferentes vectores iniciales.
26.59 Desarrolle el método de potencias inversas.
Ésta es una extensión del cambio de eigenvalor utilizado en el problema 26.56. Si A tiene eigenvalo­
res λ1, entonces A - tl y (A - t/)-1 tienen eigenvalores λi - t y (λi - t)-1 respectivamente. Aplicando el método
de potencias como en el problema 26.53, pero utilizando (A - tl)-1 en lugar de A, tenemos
Si f está cerca de un eigenvalor λk, entonces el término ak(λk - t)-PVk dominará la suma, suponiendo que ak ≠
0 y que λk es un eigenvalor aislado. Las potencias que se están calculando conducirán entonces a un ei-
www.elsolucionario.org
MÉTODOS NUMÉRICOS
588
genvalor de A, debido a que todas estas matrices tienen los mismos eigenvectores. Ésta es la base del mé­
todo de potencias inversas.
Una variación interesante de esta idea emplea una secuencia de valores t¡. Dada una aproximación
inicial a un eigenvalor, digamos x(0), se calcula en forma sucesiva
x(i+1)
= ci+1+(A-ti+1I)-1x(i)
siendo las ti+1 las estimaciones del cociente de Rayleigh para λk y las x(i+1) las aproximaciones a Vk. La convergen­
cia se ha probado bajo diferentes hipótesis. Se elige el factor ci+1 para hacer ||x(i+1)|| = 1 para alguna norma.
En realidad no es necesario calcular la matriz inversa. Lo que se necesita es el vector w(i+1) definido por
w(i+1)
=
(A-ti+1I)-1x(i)
por lo que es más económico obtenerlo resolviendo el sistema
(A-ti+1I)w(i+l)=xw
para este vector. Entonces x(i+1) = ci+1w(i+1). Conforme se desarrolla la secuencia, las matrices A - ti+1l se aproximarán singularmente, sugiriendo que el método tiene un carácter peligroso, pero teniendo cuidado con la
normalización y el pivoteo, pueden obtenerse resultados precisos.
26.60 ¿Cuál es la iteración inversa?
Dada una aproximación precisa a un eigenvalor de A, la iteración inversa es una forma rápida de obtener
el correspondiente eigenvector. Sea f una aproximación a λ, obtenida del polinomio característico o de otro método que produce sólo eigenvalores. Entonces A - t / es casi singular, pero aún tiene una factorización
P(A-tI) = LU
A-tI = p-1LU
como en el problema 26.8. Jomo en el problema anterior, empezamos una iteración con
(A-tl)x (1) = p-1LUx(1)=x(0)
empleando un x(0) con una componente diferente de cero en la dirección de x, el eigenvalor correspondiente
a X. La elección de x(0) = P - 1 L(1,1,.. ., 1 )T algunas veces ha sido apropiada, o lo que es lo mismo,
Ux (1) = (1, 1 , . . . , 1 ) T
26.61 Aplique la iteración inversa al problema 26.47, empleando .586 como una aproximación al eigenvalor 2 Puesto que ya se encontró el eigenvector x = (1,
1), esto servirá como una ilustración a pequeña
escala del potencial del método.
Para empezar, necesitamos los factores L y U, que necesitan ser los siguientes:
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
En este ejemplo P = /. La solución de Ux(1)
(1250,1767, -1250)T, después de lo cual
=(1,1
589
1)T, encontrada por sustitución hacia atrás, es x(1) =
LUx(2) = (1)
produce x(2) = (31 319, 44 273, 31 265)T. La normalización da como resultado el eigenvector aproximado (1,
1.414, .998)T.
REDUCCIÓN A F O R M A S CANÓNICAS
26.62 Un teorema básico del álgebra lineal establece que una matriz simétrica real A tiene sólo eigenvalores
reales y que existe una matriz ortogonal Q tal que Q-1AQ es diagonal. Los elementos de la diagonal son entonces los eigenvalores y las columnas de Q son los eigenvectores. Obtenga las fórmulas de Jacobi para
producir esta matriz ortogonal Q.
En el método de Jacobi Q se obtiene como un producto infinito de matrices de "rotación" de la forma
siendo todos los demás elementos idénticos a aquéllos de la matriz unitaria /. Si las cuatro entradas que se
muestran están en las posiciones (i, i), (i, k), (k, i) y (k, k), entonces los elementos correspondientes de
Q1-1AQ1 se calculan con facilidad y son
bii = aii cos2 φ + 2aik sen φ cos φ + akk sen2 φ
bki = bik = (akk _ aii) senφ cos φ + aik(cos2 φ -sen 2 φ)
bkk = aiisen2 φ - 2aik senφ cos φ + akk cos2 φ
Eligiendo φ tal que tan 2φ = 2aik/(aii - akk) da como resultado bk = bki = 0. En consecuencia, cada paso del algoritmo de Jacobi hace cero a un par de elementos fuera de la diagonal. Desafortunadamente el siguiente
paso, en tanto que crea un nuevo par de ceros, introduce contribuciones diferentes de cero a las posiciones
con cero anteriores. A pesar de eso, las matrices sucesivas de la forma Q21Q1-1AQ1Q2, etc., se acercan a la
forma diagonal requerida Q = Q1Q2
26.63 Aplique el método de Jacobi a A =
Con i = 1, k = 2 tenemos que tan 2φ = -2/0 cuyo significado interpretamos como 2φ - π/2. Entonces
cos φ = sen φ = y
A1 = Q1-1AQ1 =
www.elsolucionario.org
590
MÉTODOS NUMÉRICOS
A continuación tomamos i = 1, k = 3 lo que hace tan 2φ
cos φ = .88808 y calculamos
=
En consecuencia, sen φ = .45969,
La convergencia de los elementos fuera de la diagonal hacia cero no es sorprendente, pero al menos se ha
iniciado la reducción. Después de nueve rotaciones de este tipo llegamos a
en la cual los eigenvalores que se encontraron antes han reaparecido. Tenemos también
en la cual los eigenvectores son también sobresalientes.
26.64 ¿Cuáles son las tres partes principales de la variación de Givens del algoritmo de rotación de Jacobi para
una matriz simétrica real?
En la primera parte de las rotaciones del algoritmo se utilizan para reducir la matriz a la forma de triple
diagonal, siendo sólo la diagonal principal y sus dos vecinas diferentes de cero. La primera rotación está en
el plano (2, 3) incluyendo los elementos a22, a23, a32 y a33. Es fácil comprobar que tal rotación, con φ determinada por tan φ = a13/a12, sustituirá los elementos a13 (y a31) por 0. Las rotaciones sucesivas en los planes
(2, i) sustituyen luego los elementos a1i y ai1 por cero, para i = 4
n. Los valores de φ se determinan mediante tan φ = a1i/a12, donde a12 denota la ocupación presente del renglón 1, columna 2. A continuación
es el turno de los elementos a24 a2n que se sustituyen por cero mediante rotaciones en los planos (3,
4), . . . , (3, n). Continuando de esta manera se obtendrá una matriz de forma triple diagonal, puesto que
ningún cero que hemos creado se perderá en una rotación posterior. Esto puede demostrarse mediante un
cálculo directo y hacer finita la reducción de Givens, en tanto que la diagonalización de Jacobi es un proceso infinito.
El segundo paso implica la formación de la sucesión
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
591
donde las a y p son los elementos de nuestra nueva matriz
y β0 = 0. Estas fi(λ) resultan ser los determinantes de los menores principales de la matriz λ J - B , como puede verse de
desarrollando a lo largo de la última columna,
donde D tiene sólo el elemento -βi-1 en su renglón inferior, por lo que D = -βi-1fi-2(λ). Para i = n tenemos, por
tanto, en fn(λ) el polinomio de característica de 5. Puesto que nuestras rotaciones no alteran el polinomio,
es también el polinomio característico de A.
Ahora bien, si algunas βi son cero, el determinante se divide en dos determinantes más pequeños que
pueden tratarse independientemente. Si ninguna βi es cero, la sucesión de funciones fi(λ) resulta ser una
sucesión de Sturm (con la numeración invertida con respecto al orden dado en el problema 25.33). En consecuencia, el número de eigenvalores en un intervalo dado puede determinarse contando las variaciones
de signo.
Por último, el tercer paso implica determinar los eigenvectores. Aquí la naturaleza diagonal de 6 hace
que la eliminación gaussiana sea un proceso razonable para obtener directamente sus eigenvectores U¡
(eliminando una ecuación y asignando el valor arbitrario de 1 a algún componente). Los eigenvectores correspondientes de A son entonces V¡ = QU¡, donde Q es otra vez el producto de nuestras matrices de rotación.
26.65 Aplique el método de Givens a la matriz de Hilbert de tercer orden
www.elsolucionario.org
592
MÉTODOS NUMÉRICOS
Para esta pequeña matriz sólo se necesita una rotación. Con tan φ = tenemos cos φ =
Por tanto,
y sen φ =
y tenemos nuestra matriz de triple diagonal. La sucesión de Sturm está compuesta por
que conduce a los signos ± que se muestran en la tabla 26.3. Hay dos raíces entre 0 y 1 y una tercera entre
1. y 1.5. Las iteraciones se localizan después con mayor precisión en .002688, .122327 y 1.408319. El eigenvalor tan cercano a cero es otra indicación de la singularidad de esta matriz.
Tabla 26.3
Cambios
o
1
1.5
+
+
+
0
+
+
+
+
3
1
0
Para encontrar el eigenvector correspondiente a λ1, resolvemos BU1 = λ1U1 y encontramos rápidamente ut = 1, u2 = -1.6596, u3 = 7.5906 como una posibilidad. Finalmente
V1 = QU1 = (1, -5.591, 5.395)T
la cual puede normalizarse como se desee. Los eigenvectores para los otros dos eigenvalores se obtienen
con el mismo procedimiento.
26.66 Una transformación similar de A se define mediante M-1AM, para cualquier matriz no singular M. Demuestre que tal transformación lleva a eigenvalores invariables.
Puesto que Ax = λx implica
MAM 1 (Mx) = λ(Mx)
tenemos de inmediato que λ es un eigenvalor de MAM-1 con el correspondiente eigenvector Mx. Las trans­
formaciones ortogonales utilizadas en los métodos de Jacobi y Givens son casos especiales de transformaciones similares.
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
593
26.67 Muestre que una matriz que tiene todos los eigenvalores distintos y correspondientes eigenvectores independientes, puede reducirse a una forma diagonal mediante una transformación similar.
Forme la matriz M empleando los eigenvectores de A como columnas. Resulta que
AM = MD
donde D es diagonal y tiene los eigenvalores a lo largo de su diagonal. Debido a que los eigenvectores son
linealmente independientes, M-1 existe y
M-1AM = D
como se requería. Este teorema clásico sobre la reducción de matrices a una forma especial o canónica,
tiene un valor computacional cuestionable, puesto que para encontrar la solución M parece presuponerse
del problema completo.
26.68 ¿Cuál es la matriz de Hessenberg?
Es una matriz en la que ya sea el triángulo superior o el inferior es cero excepto en los elementos adyacentes a la diagonal principal. Si el triángulo superior tiene los ceros, la matriz es de Hessenberg inferior,
y viceversa. Aquí están dos matrices pequeñas de Hessenberg, siendo la segunda también triple diagonal
, puesto que es simétrica
26.69 Muestre que la matriz A puede reducirse a la forma de Hessenberg por transformación gaussiana y una
transformación similar.
Suponga que tomamos una matriz superior de Hessenberg como nuestro objetivo. Los ceros requeridos en el triángulo inferior pueden generarse columna por columna en n - 2 etapas. Supongamos que se
han concluido k - 1 etapas, y denotamos los nuevos elementos por aij. Los ceros para la columna k se arreglan entonces como sigue:
a)
De los elementos ak+1 ank se encuentra el más grande y se intercambia su renglón con el renglón
k + 1. Éste es el paso de pivoteo parcial y puede lograrse premultiplicando la matriz presente A' por
una matriz de intercambio /k+1, como se presentó en el problema 26.8.
b)
Calculamos los multiplicadores
(la doble prima se refiere a los elementos después del intecambio). Se suma cjk veces el renglón . + 1
al renglón j. Esto puede efectuarse para todas las j simultáneamente premultiplicando la matriz presente A" por una matriz Gk similar a la Li del problema 26.8.
www.elsolucionario.org
594
MÉTODOS NUMÉRICOS
renglón k + 2
Éste es el paso gaussiano.
c)
La multiplicación posterior de la matriz presente por las inversas de /k+1 y Gk. Éste es el paso de similitud. Desde luego, Ik+1 es su propia inversa, en tanto que la de Gk se encuentra cambiando los signos
de los elementos c. Esto completa la etapa k-ésima de la reducción, la cual puede resumirse mediante
con A' la entrada de la etapa anterior, o la propia A si k=1.
Los pasos a, b y c se efectúan para k = 1
cualquier etapa se conservan.
n - 2 y es fácil descubrir que los ceros objetivo de
26.70 Aplique el algoritmo del problema precedente a la matriz:
Todos los elementos aparecen en la figura 26-3, las dos etapas lado por lado. Recuerde que como un
premultiplicador, lk+1 intercambia renglones, pero como su propia inversa y posmultiplicador intercambia columnas. La matriz dada A no es simétrica, así que el resultado es una matriz de Hessenberg pero no una
triple diagonal. La matriz M de la transformación similar MAM-1 es G2/34G1/23.
26.71 ¿Cuál es el método QR para la determinación de eigenvalores?
Supongamos que tenemos una matriz de Hessenberg superior H y que puede factorizarse como
H = QR
con Q ortogonal y R una triangular superior (¿o derecha?). En el algoritmo que viene lo que en realidad encontramos primero es
QTH = R
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
0
1 2
3
0
2
3
3
1 2
I23A
1 2
0
0
1
3
0
1 2
3
3
0
1 2
0
2
1
3
3
1
0
2
G1I23A
G1I23AI23
Fig. 26-3
www.elsolucionario.org
595
596
MÉTODOS NUMÉRICOS
Fig. 26-3 (Continuación)
reduciendo H a una forma triangular a través de rotaciones sucesivas. Defina
y note que H(2) tendrá los mismos eigenvalores que H, debido al teorema del problema 26.66. (Puesto que
Q es ortogonal, QT = Q-1) Resulta que H(2) es también una matriz de Hessenberg, de modo que el proceso
puede repetirse hasta generar H(k+1) a partir de H(k) con H sirviendo como H(1) y k = 1 . . . . La situación de la
convergencia es bastante complicada, pero bajo diversas hipótesis los elementos de la diagonal se aproximan a los eigenvalores, en tanto que el triángulo inferior se aproxima a cero. (Desde luego, el factor R en
cada etapa es triangular superior, pero al formar el producto QR, para recuperar los eigenvalores originales,
los elementos de la subdiagonal se vuelven otra vez diferentes de cero.) Ésta es la idea esencial del método QR, la aniquilación final de la parte triangular inferior.
26.72 ¿Cómo puede encontrarse la matriz Q(k), requerida en la etapa k-ésima del método QR? Esto es, encuentre
Q(k) tal que
para k = 1 , . . .
Una forma de hacer esto es a través de rotaciones, de manera muy similar al método de Givens presentado en el problema 26.64. Puesto que estamos suponiendo que H es una matriz superior de Hessenberg, los elementos hi+1 son los únicos que requieren nuestra atención, para i = 1 , . .., n = 1. Pero hi+1 puede sustituirse por cero empleando la rotación
renglón i
renglón i + 1
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
597
col.
col.
i i + 1
y calculando SiTH, siempre que tan Φ = hi+1/h¡j: (Es más sencillo dejar Φ = chi+1jcos Φ = chii y elegir c para
hacer la suma de cuadrados igual a 1.) Entonces lo que necesitamos es el producto de estas rotaciones
El mismo argumento se aplica en cualquier etapa, por lo que se ha suprimido aquí el superíndice (k).
26.73 ¿Cómo se ha aplicado la idea del cambio de eigenvalor, presentado en el problema 26.56, para acelerar la
convergencia del algoritmo QR?
En vez de factorizar la matriz H, intentamos la reducción
Q T (H - p I ) = R
para algún valor apropiado de p. De esta manera está implicada la factorización H - pl - QR. En consecuencia,
Q T ( H - p l ) Q = RQ = H (2) - p l
exhibe el producto inverso que es un aspecto central del método y define también H(2). Pero entonces
H (2) = Q T (H - pI)Q + p l = QTHQ
así que H(2) tiene otra vez los mismos eigenvalores que H. Con H(2) disponible, estamos listos para iniciar la
siguiente iteración. Sería conveniente elegir p cerca de un eigenvalor, pero en la ausencia de tal información interna, se recomienda la siguiente alternativa. Encuentre los eigenvalores de la submatriz 2 por 2 en
la esquina derecha inferior de la H presente y deje p igual a uno de los valores más cercanos a hm suponiendo que estos valores son reales. Si ellos son complejos, fije p de acuerdo con su parte real común.
26.74 Dada la pequeña matriz de Hessenberg
encuentre los eigenvalores por el método QR.
Es fácil descubrir que ios eigenvalores son los elementos de la diagonal 4 , 1 , 3 . Pero también es interesante observar que el método QR efectúa la triangulación. Eligiendo un cambio de 3, calculamos
www.elsolucionario.org
598
MÉTODOS NUMÉRICOS
la cual necesitará sólo una rotación para alcanzar la forma triangular.
La posmultiplicación por S completa, después, la transformación similar.
Finalmente sumamos 3/ y tenemos
habiéndose preservado la forma triangular. Ordinariamente esto no ocurrirá, y varias etapas tales como la
anterior se necesitarán.
26.75 Aplique el método QR a la matriz de Hessenberg
para la cual los eigenvalores exactos son 6, 4, 3 y 3.
Un número sustancial de ciclos de rotación reducirán al final esta matriz a la siguiente forma triangular:
en la cual los eigenvalores son evidentes a lo largo de la diagonal. En trabajos más grandes se obtendría
un ahorro en el tiempo de cómputo mediante una reducción del orden cuando uno de los elementos subdiagonales se vuelva cero. En este caso simplemente se observó cómo se anulaba lentamente la parte triangular inferior. Empleando los anteriores eigenvalores aproximados, se encontraron directamente los vectores correspondientes y se equiparan con los correctos (3, 3, 2, 1), ( - 1 , - 1 , 0, 1) y (0, 0 , - 1 , 1) hasta tres
lugares decimales más o menos. No hay un cuarto eigenvector.
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
599
26.76 Aplique el método QR a la matriz tridiagonal
y después emplee los resultados obtenidos para "adivinar" los eigenvalores correctos.
Se aplicaron otra vez los ciclos de rotación obteniéndose el resultado que se presenta abajo. Los elementos fuera de la diagonal son esencialmente cero
Puesto que la matriz dada era simétrica, las partes triangulares tanto inferiores como superiores se han
vuelto cero, dejando evidentes los eigenvalores. Tomando el más grande, un cálculo directo del eigenvector
produce
(1.00002, 1.61806, 1.61806, 1)
habiéndose fijado al inicio el cuarto componente. Adivinando que éste debía haber sido (1, x, x, 1) se llega
rápidamente a las ecuaciones
λ = x+4
X2-X-1 =0
la segunda de las cuales es familiar por su conexión con los números de Fibonacci. La raíz x = (1 +
se asocia luego con λ = (9 +
en tanto que x = (1 - s e asocia con λ = (9 brindándonos
dos de las soluciones exactas. Las otras dos se encuentran de modo similar.
SISTEMAS COMPLEJOS
26.77 ¿Cómo puede reemplazarse el problema de resolver un sistema de ecuaciones complejas por el de la
solución de un sistema real?
Esto es casi automático, puesto que los números complejos son exactamente iguales cuando sus
partes reales e imaginarias son iguales. La ecuación
(A + iB)(x + iy) = a + ib
es de inmediato equivalente a
Ax-By = a
Ay + Bx = b
y ésta puede escribirse en forma de matriz como
www.elsolucionario.org
600
MÉTODOS NUMÉRICOS
Un sistema complejo n x n se ha sustituido por un sistema real 2n x 2n, y ahora puede utilizarse cualquiera
de nuestros métodos para sistemas reales. Es posible reemplazar este sistema real por dos sistemas
(B -1 A + A -1 B)x = B -1 a + A -1 b
(B-1A + A -1 B)y = B-1b - A-1a
de tamaño n*n con matrices de coeficiente idénticas. Esto resulta de
(B -1 A + A -1 B)x = B - 1 A x - By) + A - 1 B x + Ay) = B -1 a + A -1 b
(B -1 A + A -1 B)y - B - 1 A y + Bx) + A - 1 B y - Ax) = B -1 b - A - 1 a
Al emplear estos sistemas más pequeños se acorta ligeramente todo el cálculo.
26.78 Reduzca el problema de invertir una matriz compleja al de invertir matrices reales.
Sea la matriz dada A + iB y su inversa C + iD. Vamos a encontrar C y D tales que (A + iB)(C + iD) = /.
Suponga que A es no singular de modo que existe A-1. Entonces
C = (A +
BA-1B)-1
D = -A-1B(A + BA-1B)-1
como puede verificarse por sustitución directa. Si B es no singular, entonces
C = B-1A(AB-1 +
B)-1
D = -(AB-1 + B)-1
como puede verificarse por sustitución. Si tanto A como 0 son no singulares, los dos resultados son, desde
luego, idénticos. En caso de que tanto A como θ sean singulares, pero (A + iB) no lo sea, entonces parece
necesario un procedimiento más complicado. Primero se determina un número real t tal que la matriz E = A + tB
es no singular. En consecuencia, con F = B - t A , encontramos E + iF = (1 - it)( A + iB) y así
(A + iB) -1 = (1 - it)(E + iF)-1
Esto puede calcularse mediante el primer método puesto que £ es no singular.
29.79 Extienda el método de Jacobi para encontrar eigenvalores y eigenvectores en el caso de una matriz hermitiana.
Utilizamos el hecho de que una matriz hermitiana H se diagonaliza bajo una transformación unitaria,
esto es, U-1HU es una matriz diagonal. Las matrices H y U tienen las propiedades H-1 = H y U-T = U-1 La
matriz U se obtendrá como un producto infinito de matrices de la forma
todos los demás elementos concuerdan con los de l. Los cuatro elementos que se muestran están en las
posiciones (i, i), (i, k), (k, i) y (k, k). Si los elementos correspondientes de H son
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
601
entonces los elementos (i, k) y (k, i) de U-1HU tendrán partes real e imaginaria iguales a cero,
(d - α) cos φ sen φ cos θ + b cos2 φ - b sen2 φ cos 2θ - c sen2 φ sen 2θ = 0
(a-d) cos φ sen φ sen θ - c cos2 φ + b sen2 φ sen 2θ - c sen2 φ cos 2θ = 0
si φ y θ se eligen de modo que
Este tipo de rotación se aplica iterativamente como en el problema 26.62 hasta que todos los elementos de la diagonal se han hecho satisfactoriamente pequeños. Los eigenvalores (reales) se aproximan entonces mediante los elementos diagonales que resultan, y ios eigenvectores mediante las columnas de U =
U1U2U3
26.80 ¿Cómo pueden encontrarse los eigenvalores y eigenvectores de una matriz compleja general? Suponga
que todos los eigenvalores son distintos.
Como un primer paso obtenemos una matriz unitaria U tal que U-1U = T, donde T es una matriz
triangular superior, siendo cero todos los elementos debajo de la diagonal principal. Otra vez U se obtiene
como un producto infinito de matrices de rotación de la forma U1 que se mostró en el problema anterior, que
ahora podemos escribir como
El elemento en la posición (k, i) de U1-1AU1 es entonces
lo que asegura automáticamente que U1 será unitaria,
Para hacer esto cero dejemos y = Cx, x
=
y determinamos después C mediante la condición aikC2 + (aij - akk) - akj = 0 que hace
Puede usarse cualquier signo, preferiblemente el que hace a |C| más pequeña. Las rotaciones de este tipo
se efectúan en sucesión hasta que todos los elementos debajo de la diagonal principal son esencialmente
cero. La matriz resultante es
donde U=U1U2 • • • Un. Los eigenvalores tanto de T como de A son los elementos de la diagonal fk.
www.elsolucionario.org
602
MÉTODOS NUMÉRICOS
En seguida obtenemos los eigenvectores de T, como las columnas de
La primera columna es en realidad un eigenvector que pertenece a f11. Para hacer la segunda columna un
eigenvector perteneciente a t22 requerimos t11w12 + t12 = t22w12 o w12 = t12/(t22 = t11) suponiendo t11 ≠ t22. Similarmente, para hacer la tercera columna un eigevector necesitamos
En general las wjk se encuentran de la recurrencia
con i = k - 1, k - 2
1 sucesivamente. Finalmente se disponen los eigenvectores de la propia A como
las columnas de UW.
Problemas suplementarios
26.81 Aplique el algoritmo de eliminación de Gauss para encontrar el vector solución de este sistema:
w+ 2x-l2y + 8z=27
5w + 4x + 7y - 2z = 4
- 3 w + 7x+ 9y+5z = ll
6 w - 1 2 x - 8y + 3z = 49
26.82 Aplique el método del problema 26.10 para encontrar el vector solución de este sistema:
33x1 + 16x2 + 72x3 = 359
-24x 1 - 10x2 - 57x3 = 281
- 8 x 1 - 4 x 2 - 1 7 x 3 = 85
26.83 Suponga que se ha encontrado que el sistema
1.7x1+ 2.3x 2 -1.5x 3 = 2.35
1.1x1+ 1.6x 2 -1.9x 3 = - . 9 4
2.7x 1 -2.2x 2 +1.5x 3 = 2.70
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
603
tiene una solución cercana a (1, 2, 3). Aplique el método del problema 26.28 para obtener una aproximación
mejorada.
26.84 Aplique la eliminación gaussiana al sistema que sigue, calculándolo en forma racional de modo que no se
introduzcan errores de redondeo, obteniendo así una solución exacta. La matriz coeficiente es la matriz de
Hílbert de cuarto orden.
26.85 Repita el problema anterior con todos los coeficientes sustituidos por decimales que tengan tres dígitos significativos. Retenga sólo tres dígitos significativos a lo largo de todo el cálculo. ¿Qué tanto se acercan sus
resultados a la solución exacta del problema anterior? (Las matrices de Hilbert de alto orden son extremadamente problemáticas incluso cuando pueden llevarse muchos dígitos decimales.)
26.86 Aplique la iteración de Gauss-Seidel en el siguiente sistema:
-2x1+ x2
x1 - 2x2 + x3
= -l
= 0
x2-2x3 + x4= 0
x3-2x4 = 0
Empiece con la aproximación xk = 0 para todo k, reescribiendo el sistema y despejando en cada ecuación la
incógnita de la diagonal. ¿Después de hacer varías iteraciones puede usted adivinar el vector solución correcto? Este problema puede interpretarse en términos de un camínate que se desplaza al azar, quien toma
cada paso a la izquierda o la derecha, en forma aleatoria, a lo largo de la línea de la figura 26-4. Cuando alcanza un extremo se detiene. Cada xk representa la probabilidad de alcanzar el extremo izquierdo desde la
posición k. Podemos definir x0 = 1 y x5 = 0, en cuyo caso cada ecuación tiene la forma xk-1 - 2xk + xk+1 =
0,k=1
4.
longitud del paso
Fig. 26-4
26.87 ¿La sobrerrelajación acelera la convergencia hacia la solución exacta del problema 26.86?
www.elsolucionario.org
604
MÉTODOS NUMÉRICOS
26
26.88 Aplique el método de Gauss-Seidel al sistema
que puede interpretarse como el desplazamiento al azar de un caminante que se mueve hacia la izquierda
tres veces y el mismo número hacia la derecha, sobre una línea con posiciones numeradas del 0 al 20.
26.89 El problema anterior es uno de valores en la frontera para una ecuación en diferencias. Muestre que su
solución exacta es xk = 1 - (3k - 1)/(320 - 1). Calcule estos valores para k = 0(1)20 y compare con los resultados encontrados mediante el algoritmo de iteración.
26.90 Aplique la sobrerrelajación al mismo sistema. Experimente con valores de w. ¿Parece promisoria la sobrerrelajación (w < 1) para este sistema?
26.91 Aplique cualquiera de nuestros métodos al siguiente sistema.
x1+x2
+ x3 + x4 + x5 = 1
x1 + 2x2 + 3x3 + 4X 4 + 5x5 = 0
x1 + 3x2 + 6x3 + 10X4 + 15X5 = 0
x1 + 4x2 + 10X3 + 20x4 + 35x5 = 0
x1 + 5x2 + 15x3 + 35x4 + 70x5 = 0
26.92 Invierta la misma matriz coeficiente del problema 26.81 mediante el algoritmo de eliminación del problema
26.38.
26.93 Invierta la misma matriz mediante el método de intercambio.
26.94 Invierta la matriz de coeficientes del problema 26.86 mediante cualquiera de nuestros métodos.
26.95 Intente invertir la matriz de Hilbert de cuarto orden empleando aritmética de tres dígitos.
26.96 Intente invertir la matriz de Wilson. Invierta la inversa. ¿Qué tanto se acercó usted a la original?
26.97 Aplique el método del problema 26.43 a la matriz del problema 26.82. ¿Parece converger hacia la inversa
exacta?
www.elsolucionario.org
605
SISTEMAS DE ECUACIONES LINEALES
26.98
Evalúe el determinante de la matriz de coeficientes del problema 26.81.
26.99
Evalúe el determinante de la matriz de coeficientes del problema 26.82.
26.100 ¿Cuál es el determinante de la matriz de Hilbert de cuarto orden?
26.101 Aplique el método del problema 26.48 para encontrar los eigenvalores y los eigenvectores de Ax = λx,
donde A es la matriz de Hilbert de cuarto orden. Emplee aritmética racional y obtenga el polinomio
característico exacto.
26.102 Refiriéndose al problema 26.101, aplique el mismo método a
( 2 - λ)x1 -
x2
-x 1 + ( 2 - λ ) x 2 -
=0
x3
=0
- x 2 + (2 - λ)x3
x4
=0
-x3 + (2 - λ)x4 x5 = 0
-x 4 + (2 - λ)x5 = 0
26.103 Utilice el método de potencias para determinar el eigenvalor y el eigenvector dominantes de la matriz
26.104 Emplee el método de potencias para determinar el eigenvalor y el eigenvector dominantes de la matriz de
Hilbert de tercer orden.
26.105 Aplique el método de Jacobi a la matriz de Hilbert de tercer orden.
26.106 Aplique el método de Jacobi a la matriz del problemas 26.103.
26.107 Aplique el método de Givens a la matriz del problema 26.103.
26.108 Aplique el método de Givens a la matriz de Hilbert de cuarto orden.
26.109 Resuelva el sistema
www.elsolucionario.org
606
MÉTODOS NUMÉRICOS
x1 + ix2 =1
-ix1 + x2 + ix3 = 0
-ix 2 + x3 = 0
por el método del problema 26.77.
26.110 Aplique el método del problema 26.78 para invertir la matriz de coeficientes del problema 26.109.
26.111 Aplique el método de Jacobi, como se describió en el problema 26.79, para encontrar los eigenvalores y
vectores de la matriz coeficiente del problema 26.109.
26.112 Aplique el algoritmo del problema 26.80 a la matriz A =
26.113 Suponiendo que la matriz A tiene una factorización LU, tenemos las fórmulas del problema 26.14 para
determinar los elementos factor.
Suponga que éstos se calculan de izquierda a derecha. Con las primas denotando los valores calculados,
sujetos al error de redondeo, el cálculo de uij empezaría entonces como lo siguiente. (Véanse los
problemas 1.22 y 1.23.)
Cada £ representa un error de redondeo, probablemente un error diferente en cada aparición, y el
superíndice no es una potencia sino sólo un conteo del número de los diferentes factores (1 + E). Este artificio acortará las expresiones, de otro modo largas. Continuando,
hasta que al final obtenemos el uij calculado:
Muestre que la expresión correspondiente para la lij calculada es como sigue:
26.114 Defina Δ2 como
(1 + E1)(1 + E2) = 1+2Δ 2
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
607
y note que
con u el error de redondeo máximo. Muestre de modo similar que con Δ3 definida como (1 + E1)(1 + E2)(1 +
E3) = 1 + 3Δ3 la cota u + u2+
existe, y que podemos escribir de modo más general
con Δn acotada por [(1 + u)" - 1]/n.
26.115 Combine los resultados de los dos problemas anteriores para obtener (con Δ una Δk apropiada)
y note que ésta es equivalente en forma de matriz a
L'U'=A + F
con los elementos de F como se ilustra en el lado derecho de arriba. Esto muestra que la factorización
L'W es exacta para la matriz perturbada A + F.
26.116 Muestre que los elementos de la matriz F del problema anterior no exceden en valor absoluto n veces los
términos combinados de A y L'U. Esto es,
donde Δ acota todas las Δk incluidas y bij se calcula a partir de los elementos absolutos del renglón /-ésimo
de L y la columna j-ésima de U. Esta estimación del efecto de los redondeos internos depende en gran
medida de las bij. Éstas pueden calcularse después de que se ha realizado la factorización. En este caso
n es el orden de la matriz original A. Hasta cierto punto podemos deducir que el error total es un modesto
múltiplo del redondeo máximo, siempre que n no sea demasiado grande y cooperen las bij.
26.117 Las fórmulas para la sustitución hacia adelante y la sustitución hacia atrás, obtenidas en el problema 26.9
tienen la misma forma que las que acaban de analizarse para la propagación del error de redondeo.
Razonando en forma similar a la del problema anterior, es posible obtener esta ecuación para la y' calculada
donde
y en consecuencia
para la propia solución calculada. Aquí
www.elsolucionario.org
608
MÉTODOS NUMÉRICOS
Combinando estos resultados con ios del problema precedente, demuestre que
(A + E)x' = b
con E una mezcla de F, G, H, L y U. Deduzca además la estimación
con b¡ como se definió antes.
26.118 Aplique el algoritmo del problema 26.80 a la matriz real pero no simétrica
26.119 Resuelva el sistema
6.4375x1 + 2.1849x2 - 3.7474x3 + 1.8822x4 = 4.6351
2.1356x1 + 5.2101x2 + 1.5220x3 - 1.1234x4 = 5.2131
-3.7362x 1 + 1.4998x2 + 7 . 6 4 2 1 x 3 + 1.2324x4 = 5.8665
1.8666x1 - 1.1104x2 + 1.2460x3 + 8.3312x4 = 4.1322
26.120 Encuentre todos los eigenvalores de este sistema:
4x + 2y + z = λx
2x + 4y + 2z = λy
x + 2y + 4z = λz
26.121 Encuentre todos los eigenvalores y eigenvectores de este sistema:
26.122 Invierta la matriz de Pascal
www.elsolucionario.org
SISTEMAS DE ECUACIONES LINEALES
26.123 Invierta la siguiente matriz:
26.124 Invierta la siguiente matriz:
26.125 Encuentre el eigenvalor más grande de
hasta tres lugares.
26.126 Encuentre el eigenvalor más grande de
y el eigenvector correspondiente.
26.127 Encuentre los dos eigenvalores extremos de
26.128 Muestre que el polinomio característico para la matriz
www.elsolucionario.org
609
610
MÉTODOS NUMÉRICOS
es λ2 - λ - 1 y note la relación con los números de Fibonacci como se encontraron en el problema
18.23 y en otras partes. ¿Cuál es el polinomio característico para la matriz más general de "Fibonacci" de
orden n?
Encuentre sus eigenvalores por cualquiera de nuestros métodos.
Dado algún vector inicial x, ¿cuáles son los vectores
para p = 2 , . . . ?
26.129 Aplique el método QR a esta matriz de Hessenberg:
26.130 Aplique el método QR a la siguiente matriz de diagonal triple:
26.131 La rotación de un cuadrado en un cuarto de giro en el sentido de las manecillas del reloj puede simularse
aplicando la matriz de permutación R al vector (1, 2, 3, 4)T. (Véase la figura 26-5.) La reflexión en la línea
vertical (interrumpida) puede simularse empleando la matriz V. Se encuentra con facilidad que los eigenvalores de R son 1,/, - 1 , -i, en tanto que los de V son 1, 1 , - 1 , - 1 . Ambas matrices son del tipo Hessenberg. ¿Será convergente el algoritmo QR del problema 26.73 en cualquier caso?
Fig. 26-5
www.elsolucionario.org
Programación lineal
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras el problema básico de la programación lineal (Introducción).
2. Explicar con sus propias palabras cuando menos cinco ventajas y cinco desventajas de la aplicación
de la programación lineal (Introducción).
3. Explicar con sus propias palabras cuando menos cinco situaciones en las que sea conveniente la
aplicación de la programación lineal (Introducción).
4. Aplicar ei método gráfico para resolver problemas de programación lineal en dos y tres dimensiones
(Problemas 27.1 a 27.3, 27.17 a 27.19, 27.24, 27.25, 27.35)
5. Expresar con sus propias palabras tres de las principales características de los problemas de
programación lineal (Introducción, Problema 27.4).
6. Explicar con sus propias palabras la idea general del método símplex, para resolver problemas de
programación lineal (Introducción, Problema 27.5).
7. Desarrollar el algoritmo del método símplex (Problemas 27.5, 27.6).
8. Aplicar el método símplex en problemas de programación lineal (Problemas 27.7 a 27.10, 27.19 a
27.21,27.26,27.33)
9. Explicar con sus propias palabras la idea general del teorema dual, para resolver problemas de
programación lineal (Introducción, Problema 27.11).
10. Aplicar el método dual en problemas de programación lineal (Problemas 27.12, 27.13, 27.22, 27.23,
27.34).
11. Explicar con sus propias palabras de qué manera un juego de dos personas, en el cual una desea
maximizar sus ganancias y la otra minimizar sus pérdidas, puede expresarse como un problema de
programación lineal (teoría de juegos) (Introducción, Problema 27.14)
12. Aplicar el método símplex, dada una matriz, para encontrar estrategias óptimas para dos jugadores
(Problemas 27.15, 27.16, 27.27 a 27.29, 27.36, 27.37).
APLICACIONES DE LA PROGRAMACIÓN LINEAL
Los modelos son representaciones abstractas del mundo real y son importantes porque captan la esencia de muchos problemas importantes; dentro de los modelos será necesario identificar restricciones, pues son ellas limitantes del conjunto de decisiones posibles, por ejemplo: limitaciones de capital, requerimientos bancarios, limitaciones de
capacidad y de tecnología en plantas industriales, etc. La programación lineal se puede considerar un modelo
www.elsolucionario.org
612
MÉTODOS NUMÉRICOS
de toma de decisiones restringidas y se conoce también como modelo de optimización restringida. La importancia de la programación lineal surge de la fuerza de las matemáticas lineales y del hecho de que los modelos lineales pueden ser fácilmente utilizados en la realidad por los administradores y los analistas.
Dentro de la programación lineal, se deben tener en cuenta dos hechos muy importantes:
1. Siempre tiene una función objetivo para ser maximizada o minimizada y también tiene restricciones;
éstas pueden ser tanto igualdades como desigualdades.
2. Todas las funciones del problema (objetivo y restricciones) son lineales.
En este capítulo veremos también un método desarrollado por George Dantzig en 1947, llamado método símplex,
para resolver problemas de programación lineal y teoria de juegos, que es otra aplicación de la programación lineal; la teoría moderna de juegos fue desarrollada en la década de 1940 por John von Newman y Oskar Morgenstern para dar un marco de referencia a la economía. Las principales bases de esta teoría se sustrajeron de juegos
conocidos como el ajedrez, el bridge, dominó, solitario y damas, sin hacer referencia específica a ninguno de los
juegos mencionados. Esta teoria se puede aplicar al análisis de cualquier comportamiento competitivo entre
dos entidades o dos personas y esto incluye los juegos conocidos, las guerras, la competencia por la subsistencia de dos especies animales, etcétera.
En términos generales, para resolver problemas de programación lineal es necesario el uso de computadoras digitales ya que se requieren cálculos repetitivos y tediosos, similares a los empleados en la eliminación gaussiana vista en el capítulo 26.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Métodos numéricos
Sistemas de ecuaciones iineales
Sistemas de ecuaciones lineales
Programación lineal
Solución de sistemas inconsistentes
Problemas con valores en la frontera
www.elsolucionario.org
1
26
27
28
29
PROGRAMACIÓN LINEAL
613
EL PROBLEMA BÁSICO
Un problema de programación lineal requiere que una función lineal
se minimice (o maximice) bajo restricciones de la forma
donde i = 1
m y y = 1 , . . . , n. En forma vectorial el problema puede escribirse como
Un importante teorema de la programación lineal establece que el mínimo (o máximo) requerido ocurra en un pun­
to extremo factible. Un punto (x1 xn) se llama factible si sus coordenadas satisfacen todas las m + n restricciones, y un punto extremo factible es uno donde al menos n de las restricciones se vuelven realmente igualdades.
La introducción de variables relajadas xn+1 xn+m convierte las restricciones a la forma
ai1x1 + ai2x2 + • • • + αinxn + xn+i = bi
para i = 1 , . . . , m. Esto permite que un punto extremo factible se identifique como uno en el cual n o más variables
(incluso variables relajadas) son cero. Esto es una gran ventaja. En casos especiales más de un punto extremo
factible pueden producir el mínimo requerido, en cuyo caso otro punto factible sirve también para ese propósito.
Un punto mínimo de H se denomina punto solución.
El método símplex es un algoritmo para iniciar en algún punto extremo factible y, por medio de una sucesión de intercambios, proceder sistemáticamente a otro de tales puntos hasta encontrar el punto solución. Esto se
efectúa de una manera que reduce uniformemente el valor de H. El proceso de intercambio implicado es en esencia el mismo que el presentado en el capítulo anterior para la inversión de matrices.
El teorema de la dualidad es una relación entre la solución de dos problemas
que se conocen como problemas duales, y que implican los mismos número aij, bi, y ci. Los correspondientes valores máximo y mínimo resultan ser los mismos, y la aplicación del método símplex a cualquier problema (presumiblemente el más sencillo de los dos) hace posible que las soluciones de ambos problemas se extraigan de los
resultados. Esto es evidentemente de suma conveniencia.
DOS PROBLEMAS RELACIONADOS
1.
Los juegos de dos personas requieren que R elija un renglón y C elija una columna de la siguiente matriz de "pago"'
www.elsolucionario.org
MÉTODOS NUMÉRICOS
614
2.
Los elementos a¡¡ donde se cruzan el renglón y la columna seleccionados, determinan la cantidad que R
debe pagar a C. Naturalmente C desea maximizar sus ganancias esperadas en tanto que R desea minimizar las pérdidas que espera. Estos puntos de vista en conflicto conducen a programas lineales duales
que pueden resolverse mediante el método símplex. Las soluciones se denominan estrategias óptimas
para los dos jugadores.
Los sistemas sobredeterminados de ecuaciones lineales, en los cuales hay más ecuaciones que incógnitas y ningún vector puede satisfacer el sistema completo, pueden tratarse como sistemas de programación lineal en los que buscamos el vector x que en cierto sentido tiene el mínimo error. Los detalles
aparecen en el capítulo 28.
Problemas resueltos
EL MÉTODO SÍMPLEX
27.1
Encuentre x1 y x2 que satisfagan las desigualdades
y tales que la función F = x2 - x1 se maximice.
Puesto que sólo están implicadas dos variables es conveniente interpretar todo el problema geométricamente. En un plano x1, x2 las cinco desigualdades restringen el punto (x1, x2) para que caiga dentro de la
región sombreada de la figura 27-1. En cada caso el signo de igualdad corresponde a (x1, x2) ubicado en
uno de los cinco segmentos frontera lineales. La maximización de F sujeta a estas restricciones es equivalente a encontrar aquella línea de pendiente 1 que tiene la intersección y más grande y que aún intersecta
la región sombreada. Parece claro que la línea requerida L1 es 1 = x2 - x1 y el punto de intersección (0, 1).
En consecuencia, en un máximo, x1 = 0, x2 = 1, F = 1.
Fig. 27-1
27.2 Con las mismas restricciones de desigualdades que en el problema 27.1, encuentre (x1 x2) tal que G = 2x1 + x2
sea un máximo.
Buscamos ahora la línea de pendiente -2 y que tenga la intersección y más grande en tanto continúe
intersectando la región sombreada. Esta línea es 7 = 2x1 + x2 y el punto requerido tiene x1 = 3, x2 = 1. (Véase la Fig. 27-1.)
www.elsolucionario.org
PROGRAMACIÓN LINEAL
27.3
615
Encuentre y1, y2, ya que satisfagan las restricciones
y que minimicen H = 2y1 + 4y2 + 3y3.
Al interpretar todo el problema geométricamente, encontramos que las cinco desigualdades restringen
el punto (y1, y2, y3) para que caiga dentro de la región dibujada en la figura 27-2. Esta región no está acotada en las direcciones positivas y1, y2 y3, pero sí está acotada por parte de los cinco planos, que se presentan sombreados. Estos planos corresponden a las igualdades que contienen nuestras cinco restricciones.
Minimizar H sujeta a estas restricciones es equivalente a encontrar un plano con vector normal (2, 4, 3) que
tenga las intersecciones más pequeñas y que siga intersectando la región dada. Es fácil determinar que es0, 0)
te plano es 1 = 2y1 + 4y2 + 3y3 y el punto de intersección es
Fig. 27-2
27.4
Liste tres características principales de los problemas de programación lineal y de sus soluciones, las
cuales se ilustran en los problemas anteriores.
Dejemos que el problema sea encontrar un punto x con coordenadas (x,, x2
xn) sujeto a las restricciones 0 < x, Ax < b y la minimización de una función H(x) = cTx = Σ c1x1. Denominando como un punto
factible (si es que existe) al punto que cumpla con todas las restricciones, tenemos:
1. El conjunto de puntos factibles es convexo, esto es, el segmento de linea que une dos puntos factibles
está compuesto por completo de puntos factibles. Esto se debe al hecho de que cada restricción define
un subespacio y el conjunto de puntos factibles es la intersección de estos subespacios.
2.
Hay ciertos puntos extremos factibles, los vértices de un conjunto convexo, identificados por el hecho
de que en al menos n de las restricciones se vuelven igualdades en estos puntos. En los ejemplos de
dos dimensiones, exactamente n = 2 segmentos frontera se encuentran en tales vértices. En el ejemplo
tridimensional, exactamente tres planos frontera se encuentran en cada uno de tales vértices. Sin embargo, para n > 3 es posible que más planos (o hiperplanos) se junten en un vértice.
3.
El punto solución es siempre un punto extremo factible. Esto se debe a la linealidad de la función H(x)
que se está minimizando. (Es posible que dos puntos extremos sean solución, en cuyo caso el borde
completo que las une está compuesto de soluciones, etcétera.)
www.elsolucionario.org
616
MÉTODOS NUMÉRICOS
Estas tres características de los problemas de programación lineal no se probarán aquí. También se
cumplen si H(x) se va a maximizar, o si las restricciones son de la forma Ax > b.
27.5
¿Cuál es la idea general que está atrás del método símplex para la solución de programación lineal?
Puesto que la solución ocurre en un punto extremo factible, podemos empezar en uno de tales puntos
y calcular el valor de H. Después de esto intercambiamos este punto extremo con su pareja en el otro extremo de un borde, de una manera tal que se obtenga un valor de H más pequeño (en el caso de un problema
mínimo). Eí proceso de intercambio y del siguiente borde continúa hasta que H ya no puede reducirse. Este
algoritmo de intercambio se conoce como el método símplex. Los detalles se presentan en el siguiente problema.
27.6
Desarrolle el método símplex.
Dejamos que el problema sea
Primero incluimos variables relajadas
xn+1
xn+m
para hacer
Noto que estas variables relajadas, al igual que las otras x¡, deben ser no negativas. El empleo de variables
relajadas nos permite identificar de otra manera un punto extremo factible. Puesto que la igualdad deAx < b
corresponde ahora a una variable relajada que es cero, un punto extremo se vuelve uno en el que al menos
n de las variables x1 xn+m son cero. O dicho de otro modo, en un punto extremo factible a lo más m de
estas variables son diferentes de cero. La matriz de coeficientes viene a ser
correspondiendo las últimas m columnas a las variables relajadas. Llamemos
nas de esta matriz. El sistema lineal puede escribirse entonces como
v1,v2
vn+m a las colum-
Supongamos ahora que conocemos un punto extremo factible. Por simplicidad lo consideraremos de
manera que xm+1, xm+1 sean todas cero en este punto, así que x1 xm son las (a lo más m) variables diferentes de cero. Por tanto,
x 1 v l +x 2 v 2 +•
•
•+xmvm=b
(1)
•+x m c m
(2)
y el valor H correspondiente es
H 1 =x 1 c l +x 2 c 2 +•
www.elsolucionario.org
•
PROGRAMACIÓN LINEAL
Suponiendo linealmente independientes los vectores
se en términos de esta base:
y1
617
vm, todos los n + m vectores pueden expresar-
(3)
Además definimos
(4)
Después de esto, supongamos que tratamos de reducir H1 incluyendo un pedazo pxk, para k> m y p positiva. Para conservar la restricción multiplicamos (3) para j = k por p, la cual aún debe determinarse, y sustraemos de (1) para encontrar
En forma similar de (2) y (4) el nuevo valor de H será
El cambio será fructífero sólo si hk > 0. En este caso resulta óptimo hacer p tan grande como sea posible sin
que el coeficiente xi - pvik se vuelva negativo. Esto sugiere la elección
tomándose el mínimo sobre términos con vik sólo positiva. Con esta elección de p el coeficiente de c1 se
vuelve cero, los otros son negativos, y tenemos un nuevo punto extremo factible con valor H
que es definitivamente más pequeño que H1. Tenemos además una nueva base, al haber intercambiado el
vector base v1 por el nuevo vk. El proceso se repite luego hasta que todas las hi son negativas, o hasta que
para alguna hk positiva ningún vik es positivo. En el primer caso el punto extremo presente es tan bueno como cualquier punto extremo adyacente, y puede mostrarse que es tan bueno como cualquier otro, adyacente o no. En el último caso, p puede ser arbitrariamente grande y no hay mínimo para H.
Antes de que pueda realizarse otro intercambio todos los vectores deben representarse en términos
de la nueva base. Tales intercambios ya se han efectuado en nuestra sección sobre inversión de matrices,
pero se repetirán los detalles. El vector v1 será reemplazado por el vector vk. De
resolvemos para v1 y sustituimos en (3) para obtener la nueva representación
donde
Además, la sustitución de v1 en (7) resulta en
www.elsolucionario.org
618
MÉTODOS NUMÉRICOS
donde
Además, un corto cálculo demuestra que
y ya tenemos
Este conjunto completo de ecuaciones puede resumirse en forma compacta desplegando los diferentes ingredientes del modo siguiente:
Llamando pivote a vik todas las entradas en el renglón del pivote se dividen entre este mismo, la columna
del pivote se vuelve cero excepto para un 1 en la posición del pivote, y todas las otras entradas se someten
a lo que se llamó formalmente la regla del rectángulo. Ésta se ilustrará luego en varios ejemplos.
27.7
Resuelva el problema 27.1 por el método símplex.
Después de introducir las variables de relajación, las restricciones son
con todas las cinco variables no negativas. En lugar de maximizar x2 - x1 minimizaremos x1 - x2. Tenemos
siempre disponible un cambio entre los problemas de mínimos y máximos. Puesto que el origen es un punto extremo factible, podemos elegir x, = x2 = 0, x3 = 2, x4 = 4, x5 = 3 para empezar. Esto es muy conveniente
puesto que equivale a elegir v3, v4 y v5 como nuestra primera base, la cual hace todas la vij = aij. El despliegue inicial es consecuentemente el siguiente:
Comparando con el formato del problema 27.6, se encuentran los seis vectores o y v1 v5 formando los tres renglones superiores, y los números H,
h1
en el renglón inferior. Sólo h2 es positiva. Esto
www.elsolucionario.org
27
PROGRAMACIÓN LINEAL
619
determina la columna pivote. En esta columna hay dos números positivos vi2 pero 2/2 es menor que 4/1 y
de tal modo el pivote es v12 = 2. Este número se ha encerrado en un círculo. Las fórmulas del problema anterior se aplican ahora para producir un nuevo desplegado. El renglón superior se divide simplemente entre
2, y todas las entradas se someten a la regla del rectángulo:
El vector base v3 se ha intercambiado por v2 y todos los vectores se representan ahora en términos de
esta nueva base. Pero es más importante para este ejemplo el que ninguna h¡ sea ahora positiva, por lo que
el algoritmo se interrumpe. El mínimo de x1 - x2 es -1 (haciendo el máximo de x2 - x1 igual a 1 como antes).
Este mínimo se alcanza para x2 = 1, x4 = 3, x5 = 3 como muestra la primera columna. Las restricciones hacen entonces que x1 = 0, x3 = 0, que fue lo que pronosticamos puesto que las x¡ que no corresponden con
los vectores de la base deben ser siempre cero. Los resultados x1 = 0, x2 = 1 corresponden a nuestras conclusiones geométricas anteriores. Nótese que el algoritmo símplex lo hemos tomado desde el punto extremo (0, 0) del conjunto de puntos factibles hasta el punto extremo (0, 1) que resulta ser el punto solución.
(Véase la Fig. 27.1.)
27.8
Resuelva el problema 27.2 mediante el método símplex.
Las variables de relajación y las restricciones son iguales que en el problema anterior. Debemos minimizar H = -2x 1 - x2. Siendo el origen un punto extremo, podemos empezar con este despliegue:
Tanto h1 h2 son positivas, así que tenemos una elección. La selección de h1 = 2 hace a v13 el pivote,
puesto que 3/1 es menor que 4/1. Este pivote se ha encerrado en un círculo. Intercambiando v5 por v1 tenemos una nueva base, un nuevo punto extremo y un nuevo despliegue.
Después de esto no tenemos elección, el nuevo pivote se ha encerrado en círculo y significa que in-
www.elsolucionario.org
620
MÉTODOS NUMÉRICOS
tercambiamos v4 por v2 con el siguiente resultado:
Ahora ningún h¡ es positivo, así que nos detenemos. El mínimo es - 7 , el cual concuerda con el máximo de 7 para 2x1 + x2 encontrado en el problema 27.2. El punto solución está en x1 = 3, x2 = 1 que concuerda también con el resultado encontrado en el problema 27.2. El método símplex nos ha llevado de (0, 0) a
(3, 0) y a (3, 1). La otra elección disponible en el primer intercambio nos hubiera conducido alrededor del
conjunto factible en la otra dirección.
27.9
Resuelva el problema 23.7 por el método símplex.
Con variables relajadas las restricciones se vuelven
y1 - y2 - y3 +
-2y 1 - y 2
y4 = 1
+ y5 = -1
requiriéndose que las cinco variables sean positivas o cero. Esta vez, sin embargo, el origen (y1 = y2 = y3 =
0) no es un punto factible, como muestra la figura 27-2 y como el valor negativo impuesto y5 = -1 lo corrobora. Por tanto, no podemos seguir el procedimiento inicial de los dos ejemplos previos basado en un despliegue como:
No puede permitirse el valor negativo y5 = -1 en la columna b. En esencia nuestro problema es que no tenemos un punto extremo factible a partir del cual empezar. Un procedimiento estándar para determinar tal
punto, incluso en un problema mucho más grande que éste, es introducir una base artificial. Será suficiente
en este caso alterar la segunda restricción, la cual contiene la componente b negativa, como
Después de esto puede añadirse una nueva columna a nuestro despliegue anterior
Ahora un punto extremo factible corresponde a yt = y6 = 1, siendo cero las restantes y,. Esto hace que sea
natural intercambiar v5 por v6 en la base. Sólo se requieren unos cuantos cambios de signo a través del renglón y8.
www.elsolucionario.org
27
PROGRAMACIÓN LINEAL
621
El último renglón de este despliegue inicial se explicará en seguida.
La introducción de la base artificial ha alterado nuestro problema original, a menos que podamos asegurar que y6 se cambiará al final a cero. Por fortuna esto puede arreglarse cambiando la función que se va
a minimizar de H = 2y1 + 4y2 + 3y3 como en el problema 27.2 a
H* = ly1 + 4y2 + 3y3 + Wy6
donde W es un número positivo tan grande que para un mínimo, con seguridad tendremos que hacer y6
igual a cero. Con estas alteraciones tenemos un valor H inicial de W. Los número h¡ también pueden calcularse y el último renglón del despliegue anterior es como se muestra.
Procedemos luego en el modo simple normal. Puesto que W es grande y positivo tenemos una elección de dos valores h¡ positivos. La elección de h¡ nos lleva al pivote encerrado en un circulo. El intercambio
de v6 por V1 produce un nuevo despliegue en el cual se ha eliminado la última columna puesto que ve ya no
es de interés:
Puesto que ninguna h¡ es positiva ya estamos en el final. El mínimo es 1, lo que concuerda con nuestra conclusión geométrica del problema 27.3. Además, de la primera columna encontramos y1 = y4 = con las
0, 0) encontrado también en el problema 27.3.
restantes y, iguales a cero. Esto produce el punto mínimo
27.10 Minimice la función H = 2y1 + 4y2 + 3y3 sujeta a las restricciones y1 - y2 - y3 < - 2 , -2y 1 - y2 < - 1 , siendo
positivas o cero todas las y¡.
Las variables de relajación y una base artificial convierten las restricciones en
y de modo similar al problema precedente tenemos rápidamente el siguiente despliegue inicial:
www.elsolucionario.org
622
MÉTODOS NUMÉRICOS
La función que se va a minimizar es
H*=2y 1 + 4y2 + 3y3+Wy6 + Wy7
y esto determina el último renglón. Hay varias elecciones para el pivote y elegimos la encerrada en un
círculo. Esto lleva a un nuevo despliegue al intercambiar v7 por v2 y eliminar la columna v7
Se ha encerrado en círculo un nuevo pivote y resulta el siguiente despliegue:
El mínimo de H' y H es 7, y ocurre en (0, 1,1).
EL TEOREMA DE LA DUALIDAD
27.11 ¿Qué es el teorema de la dualidad de la programación lineal?
Considere estos dos problemas de programación lineal:
Problema A
mínimo
Problema B
máximo
Se denominan problemas duales debido a las diversas relaciones entre ellos, tales como las siguientes:
1. Si cualquiera de los problemas tiene una solución entonces la tiene el otro y el mínimo de cTx es igual al
máximo de yTb.
2.
En cualquiera de los problemas el vector solución se encuentra en la forma usual. El vector solución del
problema dual puede obtenerse entonces tomando en orden las variables relajadas, asignándoles el
valor cero en la base final, y dando a cada una de las otras el valor correspondiente de -h¡.
Estos resultados no se probarán aquí, pero se ilustrarán empleando nuestros ejemplos anteriores. La
dualidad posibilita obtener la solución de ambos problemas A y B resolviendo cualquiera de ellos.
27.12 Muestre que los problemas 27.1 y 27.3 son problemas duales y verifique las dos relaciones que se afirman
en el problema 27.11.
www.elsolucionario.org
PROGRAMACIÓN LINEAL
623
Unas cuantas alteraciones menores están implicadas. Para igualar los problemas 27.1 y A minimizamos x1 - x2 en vez de maximizar x2 - x1. El vector cT es entonces (1,-1). Las restricciones se escriben como
que producen
Para el problema B tenemos entonces
que son las restricciones del problema 27.3. La condición yTb = máximo es además equivalente a
yT(-b) = 2y¡ + 4y2 + 3y3 = mínimo
así que los problemas 27.3 y B también se han igualado. Los valores extremos en ambos problemas resultan ser 1, lo que verifica la relación 1 del problema 27.11. Del despliegue simple final en el problema 27.7
obtenemos xT = (0, 1) y yT = 0, 0), en tanto que de los cálculos del problema 27.9 encontramos y1 =
0, 0) y xT = (0,1), comprobándose la relación 2.
27.13 Compruebe que los problemas 27.2 y 27.10 son duales.
La matriz A y el vector b son los mismos que en el problema 27.12. Sin embargo, tenemos ahora cT =
(-2, -1). Esto iguala el problema 27.2 con el problema A y el problema 27.10 con el problema B. El despliegue final del problema 27.8 produce xT = (3, 1) y yT = (0, 1, 1) y los mismos resultados se obtienen del problema 27.10. El mínimo común de cTx y el máximo de yTb es - 7 .
SOLUCIÓN DE LOS JUEGOS DE DOS PERSONAS
27.14 Muestre cómo el juego de dos personas puede hacerse equivalente a un programa lineal.
Sea la matriz de pago, compuesta de números positivos a,
por la cual entendemos que cuando un jugador R ha elegido el renglón / de esta matriz y el jugador C ha
elegido (independientemente) la columna/, se produce un pago por la cantidad aijde R a C. Esto constituye
una jugada. El problema es determinar la mejor estrategia para cada jugador en la selección de renglones o
columnas. De manera más específica, dejemos que C elija las tres columnas con probabilidades p1, p2, p3,
respectivamente. Entonces
p1,p2,P 3
0
y
p1+p2+p3
www.elsolucionario.org
=l
624
MÉTODOS NUMÉRICOS
Dependiendo del renglón que elija R, C tiene ahora una de las siguientes cantidades para sus ganancias
esperadas:
Sea P el menor de estos tres números. Por tanto, sin importar cómo juega R, C tendrá ganancias esperadas de al menos P en cada juego y, por consiguiente, se pregunta a sí mismo de qué manera puede maximizarse esta cantidad P. Puesto que todos los números implicados son positivos, lo mismo ocurre con P, y
obtenemos un problema equivalente dejando
y minimizando
Las diferentes restricciones pueden expresarse como x1 x2, x3
0y
Éste es el problema de tipo A de nuestro teorema de dualidad con cT = bT = (1, 1, 1).
Ahora consideraremos las cosas desde el punto de vista de R. Supongamos que elige los tres renglones con probabilidades q1 q2 q3, respectivamente. Dependiendo de la elección de columna de C, éste tiene
una de las siguientes cantidades como sus pérdidas esperadas:
donde Q es la más grande de las tres. En consecuencia, sin importar cómo juegue C, R tendrá pérdidas esperadas no mayores que Q en cada jugada. Por consiguiente, R se pregunta cómo puede minimizarse esta
cantidad Q. Puesto que Q > 0, dejamos
y consideramos el problema equivalente de maximizar
Las restricciones son y1 y2 y3 0 y
www.elsolucionario.org
PROGRAMACIÓN LINEAL
625
Este es el problema B de nuestro teorema de dualidad con cT = bT = (1, 1, 1). Hemos descubierto que el
problema de R y el problema de C son duales. Esto significa que los valores máximo P y mínimo Q serán
los mismos, de modo que ambos jugadores estarán de acuerdo con el pago promedio que es óptimo. Esto
también significa que las estrategias óptimas para ambos jugadores pueden encontrarse resolviendo sólo
uno de los programas duales. Elegimos el problema de R puesto que evita la introducción de una base artificial.
Los mismos argumentos se aplican en matrices de pago de otros tamaños. Además, el requerimiento
de que todas las aij sean positivas puede eliminarse fácilmente puesto que, si todas las aij son sustituidas
por a¡i + a, entonces P y Q son remplazadas por P + a y Q + a. Así sólo se cambia el valor del juego, no las
estrategias óptimas. En seguida se presentarán ejemplos.
27.15 Encuentre las estrategias óptimas para ambos jugadores y el pago óptimo para el juego con matriz
Minimizaremos la función -G = - y 1 - y 2 - y3 sujeta a las restricciones
siendo no negativas todas las y¡ e incluso las variables relajadas y4 y5, y6. Puesto que el origen es un punto
extremo factible, tenemos este despliegue inicial:
Empleando los pivotes indicados efectuamos tres intercambios del modo siguiente:
www.elsolucionario.org
626
MÉTODOS NUMÉRICOS
Del despliegue final deducimos que el pago óptimo, o valor del juego, es La estrategia óptima para R puede encontrarse directamente normalizando la solución y, = y2 = y3 = Las probabilidades q1, q2, q3 deben ser proporcionales a estas y, pero su suma debe ser 1. En consecuencia,
Para obtener la estrategia óptima para C notamos que no hay variables relajadas en la base final, por lo
que al poner las -h¡ en lugar de las variables relajadas (no de la base),
La normalización produce
Si cualquier jugador utiliza la estrategia óptima para combinar sus elecciones, y el pago promedio será
Para hacer el juego limpio, todos los pagos podrían reducirse por esta cantidad, o podría pedírsele a C que
pague esta cantidad antes de efectuar cada jugada.
27.16 Encuentre la estrategia óptima para cada jugador y el pago óptimo para el juego con matriz
Observe que el elemento central es tanto el máximo en su renglón como el mínimo en su columna. Es
también el máximo del renglón más pequeño y el mínimo de la columna más grande. Tal punto de soporte
www.elsolucionario.org
PROGRAMACIÓN LINEAL
627
identifica a un juego con estrategias puras. El método símplex conduce directamente a este resultado utilizando el punto de soporte como pivote. El despliegue inicial es como sigue:
Un intercambio es suficiente:
El pago óptimo es el recíproco negativo de
esto es, el elemento pivote 2. La estrategia óptima para R se
encuentra directamente. Puesto que y1 = 0, y2 = y3 = 0, normalizamos para obtener la estrategia pura
q =
0
q2 = 1
q3
=0
Sólo debe utilizarse el segundo renglón. La estrategia para C se encuentra a través de las variables relajadas. Puesto que v4 y v6 están en la base final tenemos x1 = x3 = 0, y finalmente x2 = -h5 = 5. Normalizando,
tenemos otra estrategia pura
p1 =
0
p2=l
p3
=0
Problemas suplementarios
27.17 Elabore un diagrama en el que se muestren todos los puntos que satisfacen simultáneamente todas las
restricciones:
27.18 ¿Cuáles son los cinco puntos extremos factibles para el problema anterior? ¿En qué punto extremo esta
función toma su valor máximo?
27.19 Encuentre el mínimo de F = x1 = 2x2 sujeto a las restricciones del problema 27.17 aplicando el método
símplex. ¿Obtiene usted el mismo valor y el mismo punto extremo factible que con el método geométrico?
www.elsolucionario.org
628
MÉTODOS NUMÉRICOS
27.20 ¿Cuál es el dual del problema 27.19? Empleando el resultado final del símplex que se obtuvo en ese
problema, muestre que la solución del dual es el vector y1 = y2 = y3 = 0.
27.21 Encuentre el máximo de F = x1 = 2x2 sujeta a las restricciones del problema 27.17, aplicando el método
simplex. (Minimice -F.) ¿Obtiene los mismos resultados que con el método geométrico?
27.22 ¿Cuál es el dual del problema 27.21? Encuentre su solución a partir del despliegue final del símplex en ese
problema.
27.23 Resuelva directamente el dual del problema 27.19 mediante el método simplex, empleando una variable
adicional para una base artificial. Las restricciones deben leerse entonces
con y4 y y5 las variables relajadas. La función que se minimizará será H = 4y1 + y2 + 3y3. Del despliegue inicial recupere tanto la solución del dual como del propio problema 27.19.
27.24 Minimice F = 2x, + x2 sujeta a las restricciones
siendo todas las x¡ no negativas. (La solución produce x1 = x2 =
27.25 Muestre geométricamente que para un mínimo de F = x1 - x2 sujeta a las restricciones del problema 27.17
habrá una infinidad de puntos solución. ¿Dónde están? Muestre que el método símplex produce un punto
solución extremo directamente y que también produce otro si se hace un intercambio final de v3 y v1 aun
cuando el valor correspondiente h¡ es cero. El conjunto de puntos solución es el segmento que une estos
puntos extremos.
27.26 Minimice F = x1 + x4 sujeta a las restricciones
siendo todas las x1 no negativas. (El mínimo es cero y ocurre en más de un punto factible.)
27.27 Encuentre las estrategias y el pago óptimos para el juego
empleando el método símplex. [El pago es 2.5, la estrategia para R,
27.28 Resuelva el juego con matriz
www.elsolucionario.org
y la correspondiente a C,
629
PROGRAMACIÓN LINEAL
mostrando que el pago óptimo será y1 la estrategia óptima para R,
última.
y que para C también será esta
27.29 Resuelva el siguiente juego mediante el método símplex:
27.30 Maximice x1 = x2 + 2x3 sujeta a
y todas las xk > 0.
27.31 Resuelva el dual del problema anterior.
27.32 Maximice 2x1 + x2 sujeta a
y todas las xk > 0. Trate los casos A = 0, 3, 6, 9, 12.
27.33 Emplee programación lineal para encontrar estrategias óptimas para ambos jugadores en el siguiente
juego:
27.34 Resuelva como un problema de programación lineal el juego con matriz de pago
www.elsolucionario.org
Solución de sistemas
inconsistentes
OBJETIVOS ESPECÍFICOS DE APRENDIZAJE.
El alumno deberá ser capaz de:
1. Explicar con sus propias palabras la naturaleza del problema que se presenta al intentar resolver
sistemas inconsistentes (Introducción, Capítulo 26).
2. Explicar con sus propias palabras en qué consisten y cuál es la utilidad de los métodos de mínimos
cuadrados y minimax (Introducción, Capítulos 21 y 22).
3. Explicar de manera general la forma de resolver sistemas inconsistentes mediante mínimos cuadrados
(Introducción).
4. Efectuar el desarrollo matemático para encontrar las ecuaciones normales del método de mínimos
cuadrados para resolver sistemas inconsistentes, expresándolas en forma matricial (Introducción,
Problemas 28.1, 28.23).
5. Aplicar el método de mínimos cuadrados para resolver sistemas inconsistentes (Introducción,
Problemas 28.2 a 28.4, 28.11, 28.12, 28.14 a 28.16, 28.18, 28.19, 28.21 a 28.23).
6. Explicar de manera general la forma de resolver sistemas inconsistentes mediante el método de
Chebyshev o minimax (Introducción).
7. Efectuar el desarrollo matemático para resolver sistemas inconsistentes mediante el método de
Chebyshev, aplicando programación lineal (Introducción, Problema 28.5).
8. Aplicar el método de Chebyshev para resolver sistemas inconsistentes (Introducción, Problemas 28.6,
28.7, 28.13 a 28.15, 28.17).
9. Comparar los resultados obtenidos al aplicar los métodos de mínimos cuadrados y de Chebyshev, al
resolver sistemas inconsistentes (Problemas 28.8 a 28.10, 28.14, 28.16, 28.17)
APLICACIONES DE LA SOLUCIÓN DE SISTEMAS INCONSISTENTES:
En la teoría del capitulo 26 se plantean tres posibilidades en la solución de los sistemas de ecuaciones lineales, a
saber: solución única, un número infinito de soluciones y por último sistemas que no tienen solución (también
conocidos como sistemas inconsistentes); en este capítulo se van a mostrar dos métodos para atacar este problema, ya que en la vida real es probable que nos encontremos con esta situación que puede ocurrir cuando tomamos datos de un experimento y generamos más resultados de los requeridos. Otra posibilidad surge cuando se
nos han proporcionado los datos y no estamos capacitados por alguna razón para discriminar entre ellos; en las si-
www.elsolucionario.org
SOLUCIÓN DE SISTEMAS INCONSISTENTES
631
tuaciones anteriores requeriremos resolver los sistemas de ecuaciones resultantes y tomar decisiones basadas en
los resultados. Los métodos presentados en este capítulo emplean los conocimientos adquiridos en los capítulos
21, 22, 26 y 27, ya que son una sofisticación de los problemas planteados en programación lineal.
Desde luego cabe mencionar que es preferible destinar mayor tiempo a la planeación de un experimento, enfocando muy bien el objetivo, que hacer acrobacias con los datos.
CORRELACIÓN DEL TEMA CON OTROS CAPÍTULOS
Métodos numéricos
Polinomios
Manejo de funciones continuas
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Operación de polinomios
Aproximación polinomial por mínimos cuadrados
Aproximación polinomial por minimax
Manejo de ecuaciones
Sistemas de ecuaciones diferenciales
Sistemas de ecuaciones lineales
Sistemas de ecuaciones lineales
Programación lineal
Soluciones de sistemas inconsistentes
Problemas con valores en la frontera
www.elsolucionario.org
1
2
21
22
21
22
20
26
27
28
29
632
MÉTODOS NUMÉRICOS
NATURALEZA DEL PROBLEMA
Un sistema inconsistente de ecuaciones lineales toma la forma
Ax = b
teniendo la matriz A más renglones que columnas. Ordinariamente no existirá vector solución x, por lo que la
ecuación en la forma en que está escrita no tiene sentido. El sistema también se llama sobredeterminado. Los sistemas sobredeterminados surgen en el trabajo experimental o computacional cada vez que se generan más resultados que los que se requerirían si fuera alcanzable la precisión. En cierto sentido, una masa inexacta y conflictiva
de información viene a ser un sustituto para resultados poco perfectos y se esperaría que buenas aproximaciones
a los resultados exactos puedan de alguna manera extraerse del conflicto.
DOS MÉTODOS DE A P R O X I M A C I Ó N
Los dos métodos principales implican el vector residuo
R = Ax - b
Puesto que R no puede reducirse ordinariamente al vector cero, se realiza un esfuerzo para elegir x de manera tal
que r se minimice en cierto sentido.
1.
La solución por mínimos cuadrados de un sistema sobredeterminado es el vector x que hace la suma
de los cuadrados de los componentes del vector residual, un mínimo. En lenguaje vectorial queremos
Para m ecuaciones y n inc