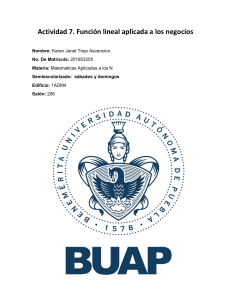
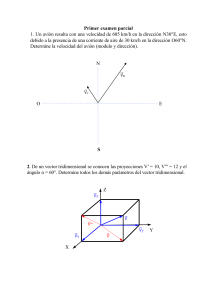
Sistemas de Ecuaciones Diferenciales en R2 Leonardo Laura λ1 0 0 λ2 λ 1 0 λ 13 de junio de 2020 a −b b a Índice general 1. Introducción 4 2. Sistemas lineales 2.1. ¿Qué es una solución? . . . . . 2.2. ¿Cómo encontrar una solución? 2.3. Valores propios reales diferentes 2.4. Valor propio real repetido . . . 2.5. Valores propios complejos . . . 2.6. Ecuaciones no homogéneas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 . 6 . 8 . 8 . 13 . 18 . 27 3. Sistemas no lineales 29 3.1. Linealización . . . . . . . . . . . . . . . . . . . . . 29 3.2. Teorema de Hartman-Grobman . . . . . . . . . . . 34 3.3. Estabilidad de Lyapunov . . . . . . . . . . . . . . . 35 4. Aplicaciones 4.1. Modelo IS-LM . . . . . 4.2. Carrera armamentista . 4.3. Explotación de recursos 4.4. Modelos de crecimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 38 39 40 40 A. Forma Jordan de matrices 42 B. Exponencial de matrices 44 C. Teorema fundamental de sistemas lineales 45 2 El objetivo de estas notas de clase es estudiar los conceptos básicos de sistemas dinámicos a tiempo continuo en el plano real: solución general de sistemas lineales, linealización, estabilidad de Lyapunov y aplicaciones en modelos económicos. Una buena comprensión de estos temas ayuda a entender el comportamiento de los sistemas en espacios de mayor dimensión. Leonardo Laura, [email protected]. 3 1 Introducción Consideremos la matriz A= a c b d . La traza de la matriz A está definida por tr(A) := a + d y su determinante por det(A) := ad − bc. Matriz inversa. Si det(A) = ad − bc 6= 0, la inversa de A es 1 d −b −1 A := . (1.1) −c a det(A) Valores y vectores propios. Un número λ (real o complejo), se dice que es un valor propio si existe un vector v 6= 0 tal que Av = λv. (1.2) En este caso se dice que v es un vector propio asociado a λ. Los vectores que tienen la misma dirección que un vector propio (múltiplos escalares), también satisfacen la definición de vector propio, por lo que basta escoger uno de ellos. De la igualdad (1.2) vemos que (A − λI)v = 0 (1.3) para v 6= 0, lo cual significa que la matriz A − λI no es invertible, es decir det(A − λI) = 0. (1.4) 4 1 Introducción Polinomio característico. El polinomio característico de la matriz A es p(λ) := det(A − λI) = λ2 − tr(A)λ + det(A). (1.5) ¿Cómo encontrar los valores propios? De acuerdo al las ecuaciones (1.4) y (1.5), un valor propio de la matriz A debe ser solución de la ecuación p(λ) = λ2 − tr(A)λ + det(A) = 0. Así que los valores propios están dados por q 1 λ = tr(A) ± tr2 (A) − 4 det(A) 2 p 1 a + d ± (a − d)2 + 4bc . = 2 Dependiendo del signo del discriminante ∆ := tr2 (A)−4 det(A), tendremos valores propios reales diferentes, repetidos o bien, complejos. ¿Cómo encontrar los vectores propios? De la ecuación (1.3), x dado un valor propio λ, su vector propio asociado v = se y encuentra resolviendo el sistema (a − λ)x + by = 0, (1.6) cx + (d − λ)y = 0. Teniendo en cuenta que la matriz A − λI no es invertible, sus filas son linealmente dependientes. Entonces basta tomar una de las igualdades de (1.6) para encontrar v. 5 2 Sistemas lineales En este capítulo estudiaremos la familia más elemental de los sistemas de ecuaciones diferenciales: los sistemas lineales en el plano, a b ẋ = Ax = x, x(0) = x0 . (2.1) c d 2.1. ¿Qué es una solución? Una solución del sistema (2.1) es una trayectoria diferenciable x : R → R2 que pasa por el punto x0 en el instante t = 0 y su derivada (velocidad) en el punto x(t) es Ax(t), es decir ẋ(t) = Ax(t) para cada t ∈ R. Ejemplo 2.1. La ecuación diferencial 3 −4 3 ẋ = x, x(0) = 1 −1 1 (2.2) tiene como solución a la trayectoria (3 + 2t)et x(t) = . (1 + t)et Para verificar, derivamos directamente la función x(t), el cual es (5 + 2t)et ẋ(t) = , (2 + t)et luego comparamos con el resultado que se obtienen al evaluar la matriz en la trayectoria 6 2 Sistemas lineales Ax(t) = 3 1 −4 −1 (3 + 2t)et (5 + 2t)et = . (1 + t)et (2 + t)et Vemos que ambos cálculos dan lo mismo, lo cual significa que ẋ(t) = Ax(t) para todo t ∈ R. Además, evaluando x(t) en t = 0 3 encontramos la condición inicial x(0) = . 1 Figura 2.1: Trayectoria solución 5 En el estado inicial x(0) el vector velocidad es ẋ(0) = . ♦ 2 7 2 Sistemas lineales 2.2. ¿Cómo encontrar una solución? Dada una matriz A, sea λ un valor propio y v su vector propio, es decir Av = λv. Si consideremos la trayectoria x(t) = etλ v, su derivada es ẋ(t) = λetλ v, ademas, evaluando la matriz A en x(t) tenemos Ax(t) = A(etλ v) = etλ Av = etλ λv = ẋ(t). Es decir, x(t) es una solución del sistema ẋ = Ax con condición inicial x(0) = v, lo cual nos indica que es posible determinar algunas soluciones usando valores y vectores propios. En las siguientes secciones, veremos que en realidad todas las soluciones del sistema (2.1) pueden ser calculados por medio de valores y vectores propios. 2.3. Valores propios reales diferentes Teorema 2.1. Sea A una matriz de tamaño 2 × 2 que tiene dos valores propios reales diferentes λ1 y λ2 con sus vectores propios v1 y v2 , respectivamente. Entonces cualquier solución del sistema ẋ = Ax puede ser escrito de la forma x(t) = k1 etλ1 v1 + k2 etλ2 v2 para ciertos k1 , k2 ∈ R. Demostración. Ver [1, 2]. 8 2 Sistemas lineales Ejemplo 2.2. Consideremos la ecuación diferencial lineal 1 2 ẋ = x. (2.3) −1 4 Para encontrar la solución general de este sistema primero calculamos su polinomio característico, 1−λ 2 p(λ) = det = λ2 − 5λ + 6 = (λ − 2)(λ − 3). −1 4−λ Luego, resolviendo la ecuación p(λ) = (λ − 2)(λ − 3) = 0 encontramos los valores propios λ1 = 2 y λ2 = 3. En seguida, determinaremos el vector propio asociado a cada valor propio. Para λ1 = 2 resolvemos el sistema 1 − λ1 2 x −x + 2y = 0, = 0, que es −1 4 − λ1 y −x + 2y = 0. De la primera igualdad podemos deducir que una soluciónes x = 2 2 y y = 1, por lo tanto el vector propio asociado es v1 = . 1 Para λ2 = 3 resolvemos el sistema 1 − λ2 2 x −2x + 2y = 0, = 0, o bien −1 4 − λ2 y −x + y = 0. En este caso, de la segunda igualdad vemos que una solución es 1 x = 1 y y = 1. Por lo tanto, el vector propio es v2 = . 1 Solución: Las soluciones linealmente independientes son 2 1 2t 3t x1 (t) = e , x2 (t) = e . 1 1 Finalmente, la solución general de la ecuación diferencial es una combinación lineal de las soluciones linealmente independientes, x(t) = k1 x1 (t) + k2 x2 (t), con k1 , k2 ∈ R. 9 2 Sistemas lineales 4 2 0 −2 −4 −4 −2 0 2 4 Figura 2.2: Diagramas de fase del sistema (2.3). Estabilidad: Los valores propios del sistema son positivos, por lo tanto el punto de equilibrio (0, 0) es inestable; las soluciones que inician cerca del origen se alejan cuando t → ∞. 10 2 Sistemas lineales Ejemplo 2.3. Calculemos la solución general del sistema 1 3 ẋ = x. (2.4) 2 0 Su polinomio característico es 1−λ 3 p(λ) = det = (λ + 2)(λ − 3). 2 −λ Entonces, sus valores propios son λ1 = −2 y λ2 = 3. El vector propio asociado a λ1 = −2 es una solución no nula del sistema 1 − λ1 3 x 3x + 3y = 0, = 0, o bien 2 −λ1 y 2x + 2y = 0. En una de las ecuaciones hacemos y = 1 yobtenemos x = −1, −1 entonces, el vector propio asociado es v1 = . 1 De manera similar, para λ2 = 3 resolvemos el sistema 1 − λ2 3 x −2x + 3y = 0, = 0, que es 2 −λ2 y 2x − 3y = 0. Tomando el valor x = 3, encontramos que y = 2, por lo tanto el 3 vector propio asociado es v2 = . 2 Solución: Las soluciones linealmente independientes de la ecuación diferencial son −1 3 x1 (t) = e−2t , x2 (t) = e3t . 1 2 Por lo tanto, la solución general es −1 3 x(t) = k1 e−2t + k2 e3t , k1 , k2 ∈ R. 1 2 11 2 Sistemas lineales 4 2 0 −2 −4 −4 −2 0 2 4 Figura 2.3: Diagramas de fase del sistema (2.4). Estabilidad: El sistema tiene un valor propio positivo, entonces el punto de equilibrio (0, 0) es inestable; algunas soluciones que inician cerca del origen se alejan con el tiempo. 12 2 Sistemas lineales 2.4. Valor propio real repetido Teorema 2.2. Sea A una matriz de tamaño 2 × 2 que tiene un valor propio repetido λ. Entonces, 1. si λ genera dos vectores propios v1 y v2 , las soluciones del sistema ẋ = Ax se pueden escribir como x(t) = k1 eλt v1 + k2 eλt v2 , k1 , k2 ∈ R, 2. si λ solamente genera un vector propio v, se determina el propio generalizado vg , (A − λI)vg = v, y las soluciones del sistema ẋ = Ax son x(t) = k1 eλt v + k2 (vg + vt)eλt , k1 , k2 ∈ R. Demostración. Ver [1, 2]. 13 2 Sistemas lineales Ejemplo 2.4. Consideremos el sistema −2 0 ẋ = x. 0 −2 (2.5) Su polinomio característico es p(λ) = λ2 + 4λ + 4 = (λ + 2)2 . El único valor propio es λ = −2. Su vector propio v se encuentra resolviendo el sistema 0x + 0y = 0, 0x + 0y = 0. Cualquier vector es solución de dicho sistema. En este caso elegimos como vectores propios a la base canónica 1 0 v1 = , v1 = . 0 1 Decimos que el valor propio λ = 2 es de grado geométrico 2 porque genera dos vectores propios. También se dice que es de grado algebraico 2 porque es una raíz de multiplicidad 2 del polinomio característico. Solución: Las soluciones linealmente independientes son 1 0 x1 (t) = e−2t , x2 (t) = e−2t . 0 1 Por lo tanto, las solución general es 1 0 −2t −2t x(t) = k1 e + k2 e , k1 , k2 ∈ R. 0 1 14 2 Sistemas lineales 4 2 0 −2 −4 −4 −2 0 2 4 Figura 2.4: Retratos de fase del sistema (2.5). Estabilidad. El valor propio es negativo. Por lo tanto, (0, 0) es un punto de equilibrio asintóticamente estable: las soluciones que inician cerca del origen convergen al origen cuando t → ∞. 15 2 Sistemas lineales Ejemplo 2.5. Veamos el sistema 2 1 ẋ = x. −1 4 (2.6) Su polinomio característico es p(λ) = λ2 − 6λ + 9 = (λ − 3)2 . El único valor propio es λ = 3. Su vector propio v se encuentra resolviendo el sistema −x + y = 0, −x + y = 0. 1 . 1 En seguida, determinamos el vector propio generalizado vg resolviendo el sistema −x + y = 1, −x + y = 1. Vemos que una solución es v = Podemos tomar −1 0 0 0 o bien . Elijamos vg = . 1 1 Solución: Las soluciones linealmente independientes son 1 1 1 x1 (t) = e3t , x2 (t) = e3t + t . 1 0 1 La solución general es 1 1 1 3t 3t x(t) = k1 e + k2 e + t . 1 0 1 16 2 Sistemas lineales 4 2 0 −2 −4 −4 −2 0 2 4 Figura 2.5: Diagramas de fase del sistema (2.6). Estabilidad. La parte real del valor propio es positiva. Por lo tanto (0, 0) es un punto de equilibrio inestable: las soluciones que inician cerca del origen se aleja cuando t → ∞. 17 2 Sistemas lineales 2.5. Valores propios complejos Teorema 2.3. Sea A una matriz de tamaño 2 × 2 que tiene valores propios complejos λ = α ± iβ, con vectores propio v = v1 ± iv2 . Entonces las soluciones linealmente independientes del sistema ẋ = Ax son x1 (t) = eαt [v1 cos βt − v2 sin βt], x2 (t) = eαt [v1 sin βt + v2 cos βt] y la solución general es x(t) = k1 xt (t) + k2 x( t), k1 , k2 ∈ R. Demostración. Ver [1, 2]. 18 2 Sistemas lineales Ejemplo 2.6. Veamos el siguiente sistema −3 2 ẋ = x. −10 5 (2.7) Su polinomio característico es 10 − λ −1 p(λ) = det = λ2 − 2λ + 5. 25 2−λ Resolviendo λ2 − 2λ + 5 = 0, tenemos λ = 1 ± 2i. Luego, calculamos el vector propio para λ = 1 + 2i, (−4 − 2i)x + 2y = 0, −10x + (4 − 2i)y = 0. De la primera ecuación podemos ver que una solución es el vector 1 1 0 v= = + i. 2+i 2 1 El otro vector propio es la conjugada de v. Solución. Las soluciones linealmente independientes son 1 0 t x1 (t) = e cos 2t − sin 2t , 2 1 1 0 t x2 (t) = e sin 2t + cos 2t . 2 1 La solución general del sistema es x(t) = k1 x1 (t) + k2 x2 (t), con k1 , k2 ∈ R. 19 2 Sistemas lineales 4 2 0 −2 −4 −4 −2 0 2 4 Figura 2.6: Diagramas de fase del sistema (2.7). Estabilidad. La parte real del valor propio es positiva. Por lo tanto (0, 0) es un punto de equilibrio inestable: las soluciones que inician cerca del origen se aleja cuando t → ∞. 20 2 Sistemas lineales Ejemplo 2.7. Revisemos el siguiente sistema −1 2 ẋ = x. −2 −1 (2.8) Calculamos su polinomio característico −1 − λ 2 p(λ) = det = λ2 + 2λ + 5. −2 −1 − λ Resolviendo λ2 + 2λ + 5 = 0, vemos que λ = −1 ± 2i. Luego calculamos el vector propio asociado a λ = −1 + 2i, −2ix + 2y = 0, −2x − 2iy = 0, de la primera ecuación, haciendo x = 1, encontramos el vector 1 1 0 v= = + i. i 0 1 Solución. Las soluciones linealmente independientes son 1 0 x1 (t) = e−t cos 2t − sin 2t , 0 1 1 0 x2 (t) = e−t sin 2t + cos 2t . 0 1 Por lo tanto, las soluciones del sistema están dadas por la combinación x(t) = k1 x1 (t) + k2 x2 (t), k1 , k2 ∈ R. 21 2 Sistemas lineales 4 2 0 −2 −4 −4 −2 0 2 4 Figura 2.7: Diagramas de fase del sistema (2.8). Estabilidad. La parte real del valor propio es negativa. Así el punto de equilibrio (0, 0) es asintóticamente estable: las soluciones que pasan cerca del origen convergen al origen. 22 2 Sistemas lineales Ejemplo 2.8. Estudiemos el sistema 10 −1 ẋ = x. 25 2 (2.9) Su polinomio característico es 10 − λ −1 p(λ) = det = λ2 − 12λ + 45 25 2−λ y los valores propios son λ = 6 ± 3i. El vector propio asociado a λ = 6 + 3i se encuentra resolviendo el sistema (4 − 3i)x + −y = 0, 25x − (4 + 3i)y = 0. Una de las solución es 1 1 1 v= = + i. 4 − 3i 4 −3 Note que se puede tomar como vector propio cualquier otra solución, que de hecho será un múltiplo del que encontramos. Solución. Las soluciones linealmente independientes son 1 1 6t x1 (t) = e cos 3t − sin 3t , 4 −3 1 1 6t x2 (t) = e sin 3t + cos 3t . 4 −3 Cualquier otra solución es de la forma x(t) = k1 x1 (t) + k2 x2 (t) para ciertos k1 , k2 ∈ R. 23 2 Sistemas lineales 4 2 0 −2 −4 −4 −2 0 2 4 Figura 2.8: Diagramas de fase del sistema 2.9. Estabilidad. La parte real del valor propio es positiva. Entonces el punto de equilibrio (0, 0) es inestable, pues las soluciones que pasan cerca del origen se alejan de ella cuando t → ∞. 24 2 Sistemas lineales Ejemplo 2.9. Ahora veamos el sistema 0 −4 ẋ = x. 1 0 Su polinomio característico es −λ p(λ) = det 1 −4 −λ (2.10) = λ2 + 4, los valores propios son λ = ±2i. Luego calculamos el vector propio para λ = 2i, resolvemos −2ix − 4y = 0, x − 2iy = 0. Haciendo y = 1 en la segunda ecuación, obtenemos el vector 2i 0 2 v= = + i. 1 1 0 Solución. Las soluciones linealmente independientes son 0 2 x1 (t) = cos 2t − sin 2t, 1 0 0 2 x2 (t) = sin 2t + cos 2t. 1 0 Cualquier otra solución es combinación de ambas, esto es x(t) = k1 x1 (t) + k2 x2 (t), para ciertos k1 , k2 ∈ R. 25 2 Sistemas lineales 4 2 0 −2 −4 −4 −2 0 2 4 Figura 2.9: Diagramas de fase del sistema 2.10. Estabilidad. La parte real del valor propio es cero. Entonces, el punto de equilibrio (0, 0) es estable (pero no asintóticamente estable), ya que las soluciones que pasan cerca del origen permanecen cerca cuando t → ∞. 26 2 Sistemas lineales 2.6. Ecuaciones no homogéneas Teorema 2.4. La solución del problema de valor inicial ẋ(t) = Ax(t) + b(t), x(0) = x0 está dado por x(t) = Φ(t)Φ−1 (0)x0 + Φ(t) Z t Φ−1 (s)b(s)ds (2.11) 0 donde Φ(t) es una matriz fundamental del sistema ẋ(t) = Ax(t). Ejemplo 2.10. Determinemos la solución del sistema t 0 1 2e 1 ẋ = x+ , x(0) = . 1 0 t 1 Los valores propios de la matriz son λ1 = −1, λ2 = 1 y los vectores propios asociados respectivamente son 1 1 v1 = , v2 = . −1 1 Entonces las soluciones linealmente independientes del sistema homogéneo son 1 1 x1 (t) = e−t , x2 (t) = et . −1 1 La matriz fundamental tiene como columnas las soluciones x1 (t) y x2 (t), es decir, −t e et Φ(t) = [x1 (t) x2 (t)] = . −e−t et La inversa de la matriz fundamental es t 1 e −et . Φ−1 (t) = e−t e−t 2 27 2 Sistemas lineales Por lo tanto la solución es x(t) = = = = = Z t Φ(t)Φ−1 (0)x0 + Φ(t) Φ−1 (s)b(s)ds 0 −t 1 1 −1 1 e et 1 1 −e−t et 1 2 s −t Z t 1 es −es 2e e et ds + e−s e−s s −e−t et 0 2 t −t Z t 2s 1 e e et 2e − ses + ds et −e−t et 2 + se−s 2 0 −t t t t 1 e et e (e − t + 1) − 2 e + −e−t et 2t − e−t (t + 1) + 1 et 2 t e (t + 2) − e−t − t . et (t + 1) + e−t − 1 28 3 Sistemas no lineales En esta sección estudiaremos las ecuaciones diferenciales no lineales autónomas ẋ = f (x), (3.1) donde f : R2 → R2 es una función continuamente diferenciable. Una solución del sistema (3.1) es una trayectoria x : I ⊂ R → R2 cuya velocidad ẋ(t) en cada instante t está dado por f (x(t)), es decir ẋ(t) = f (x(t)) para todo t ∈ I. (3.2) Los puntos x∗ ∈ R2 para los que f (x∗ ) = 0, se conocen como puntos de equilibrio del sistema (3.1). En este caso la trayectoria constante x(t) = x∗ , t ∈ I es una solución. 3.1. Linealización De acuerdo a la fórmula de Taylor, si la función f es diferenciable en un punto x∗ ∈ R2 , entonces f (x∗ + h) = f (x∗ ) + Df (x∗ )h + r(h), (3.3) donde Df (x∗ ) : R2 → R2 es la derivada de f en x∗ y r : U ⊂ R2 → R es una función definida en una vecindad abierta del cero tal que lı́m r(h) khk = 0. h→0 Cuando x∗ es un punto de equilibrio de f , la ecuación (3.3) se convierte en f (x∗ + h) = Df (x∗ )h + r(h), (3.4) 29 3 Sistemas no lineales combinando con la ecuación (3.1) y haciendo el cambio x = x∗ +h tenemos ẋ = ḣ y la ecuación ḣ = Df (x∗ )h + r(h), cuyo primer término es lineal. Diremos que la ecuación diferencial lineal ẋ = Df (x∗ )x (3.5) es la linealización de la ecuación diferencial no lineal (3.1). Definición 3.1. Un punto de equilibrio x∗ de f se dice que es hiperbólico si la parte real de los valores propios de la función Df (x∗ ) son diferentes de cero. 30 3 Sistemas no lineales Ejemplo 3.1. Consideremos la ecuación diferencial no lineal ( ẋ = y, (3.6) ẏ = x(1 − x2 ) + y. Su retrato fase se puede apreciar en la Figura 3.1. Los pun1.5 1.0 0.5 0.0 −0.5 −1.0 −1.5 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 Figura 3.1: Diagramas de fase del sistema (3.6). tos de equilibrio son (0, 0), (1, 0) y (−1, 0), que se determinan 31 3 Sistemas no lineales resolviendo el sistema ( y = 0, x(1 − x2 ) + y = 0. La función f de la ecuación diferencial (3.6) está dado por f (x, y) = (f1 (x, y), f2 (x, y)) = y, x(1 − x2 ) + y , cuya derivada es Df (x, y) = ∂f1 ∂x ∂f2 ∂x ∂f1 ∂y ∂f2 ∂y ! = 0 1 − 3x2 1 . 1 Por lo tanto la linealización de (3.6) en el punto de equilibrio (0, 0) es 0 1 ẋ = Df (0, 0)x = x, (3.7) 1 1 cuyos valores propios son λ1 = propios respectivamente son 1 v1 = , λ1 √ 1+ 5 2 , λ2 = v2 = √ 1− 5 2 y sus vectores 1 . λ2 Puesto que los valores propios son reales y diferentes de cero, el puto de equilibrio (0, 0) es hiperbólico. El retrato fase del sistema linealizado se puede ver en la Figura 3.2. Si comparamos la Figura 3.1 con la Figura 3.2, podemos observar que en un entorno del origen, digamos de radio 1/2, las trayectorias son muy parecidas. Esto no es casualidad y se justifica en la siguiente sección. 32 3 Sistemas no lineales 4 2 0 −2 −4 −4 −2 0 2 4 Figura 3.2: Diagramas de fase del sistema linealizado (3.7). 33 3 Sistemas no lineales 3.2. Teorema de Hartman-Grobman Teorema 3.1 (Hartman-Grobman). Sea f : R2 → R2 una función diferenciable y x∗ ∈ R2 un punto de equilibrio hiperbólico de f . Existe una vecindad abierta U de x∗ y V de 0 en donde las funciones f y Df (x∗ ) son topológicamente conjugadas, es decir, existe una función biyectiva continua (homeomorfismo) h : U → V tal que h ◦ f = Df (x∗ ) ◦ h en U . En otras palabras, el Teorema 3.1 dice que las soluciones de la ecuación diferencial no lineal ẋ = f (x) que están en un entorno pequeño del equilibrio hiperbólico x∗ son cualitativamente equivalentes a las trayectorias que está en un entorno del equilibrio 0 del sistema linealizado ẋ = Df (x∗ )x. Ejemplo 3.2. La linealización de la ecuación diferencial ( ẋ = y − 1/4x3 , ẏ = −2x3 − 1/2y 3 en el punto de equilibrio (0, 0) es el sistema 0 1 ẋ = x. 0 0 El punto (0, 0) no es un punto de equilibrio hiperbólico, por lo tanto las soluciones del sistema no lineal no tienen porqué ser cualitativamente iguales a las soluciones de sistema linealizado. De hecho, se puede verificar que (0, 0) es asintóticamente estable para el sistema no lineal pero es inestable para el sistema linealizado. 34 3 Sistemas no lineales 3.3. Estabilidad de Lyapunov Definición 3.2. Sea x∗ un punto de equilibrio de la ecuación diferencial ẋ = f (x). Se dice que x∗ es un punto de equilibrio estable si para cualquier vecindad U de x∗ , existe una vecindad W ⊂ U de x∗ tal que x(t) ∈ U para toda condición inicial x(0) ∈ W y t > 0. Si además de ser estable las trayectorias convergen al punto de equilibrio, lı́m x(t) = x∗ , se dice que x∗ es un punto t→∞ de equilibrio asintóticamente estable. Teorema 3.2. El sistema ẋ = Ax es: 1. estable si y solo si A no tiene valores propios con parte real positiva y los valores propios con parte real cero son semisimples. 2. asintóticamente estable si y solo si todos los valores propios de A tienen parte real negativa. 3. inestable si A tiene algún valor propio con parte real positiva o un valor propio con parte real cero no semisimple. Ejemplo 3.3. Veamos el sistema no lineal ẋ = x + 8y + xy 2 , ẏ = x + 3y + x2 + y 2 . Su sistema linealizado en el punto de equilibrio (0, 0) es 1 8 ẋ = x, 1 3 el cual tiene valores propios λ1 = −1 y λ2 = 5. Puesto que los valores propios son diferentes de cero, el sistema no lineal es topológicamente equivalente a su linealizado. Como uno de los valore propios es positivo, el sistema no lineal y el linealizado son inestables. 35 3 Sistemas no lineales Ejemplo 3.4. Estudiemos la estabilidad del sistema no lineal ẋ = 2x − 14y + x2 y, ẏ = x − 7y + x3 + y 3 . Al linealizar en el punto de equilibrio (0, 0) obtenemos el sistema 2 −14 ẋ = x, 1 −7 el cual tiene valores propios λ1 = 0 y λ2 = −5. El sistema lineal es estable. Al tener un valor propio cero, el sistema no lineal puede tener un comportamiento cualitatitivo diferente, así que por el momento no tenemos elementos suficientes para determinar su estabilidad. Otra alternativa para estudiar la estabilidad de un sistema no lineal en un punto de equilibrio no hiperbólico es por medio de funciones de Lypunov. Definición 3.3. Sea U una vecindad abierta de un punto de equilibrio x∗ del sistema ẋ = f (x). Una función de Lyapunov es un función escalar V : U → R que satisface las condiciones 1. V es continuamente diferenciable, 2. V (x) > 0 para todo x ∈ U \ {x∗ } y V (x∗ ) = 0. La derivada orbital de la función de Lyapunov V en la dirección del campo vectorial f (x) se define como V̇ (x) = hf (x), ∇V i. Teorema 3.3 (Teorema de Lyapunov). Sea V : U → R una función de Lyapunov para un punto de equilibrio x∗ ∈ U del sistema ẋ = f (x). Si 1. V̇ (x) ≤ 0 en U , entonces x∗ es estable, 36 3 Sistemas no lineales 2. V̇ (x) < 0 en U , entonces x∗ es asintóticamente estable, 3. V̇ (x) > 0 en U , entonces x∗ es inestable. Ejemplo 3.5. Estudiemos la estabilidad de la ecuación diferencial ẋ = −y − x3 , ẏ = x − y 3 . Su único punto de equilibrio es x∗ = (0, 0). Consideremos la función de Lyapunov V (x, y) = 1/2x2 + 1/2y 2 , entonces V̇ (x, y) = = = ∂V ∂V + ẏ ∂x ∂y 3 (−y − x )x + (x − y 3 )y ẋ −x4 − y 4 . Tenemos V̇ (x, y) < 0 para todo R2 \ {(0, 0)}. Por lo tanto (0, 0) es asintóticamente estable. Ejemplo 3.6. La ecuación diferencial no lineal ẋ = y − 1/4x3 , ẏ = −2x3 − 1/2y 3 es asintóticamente estable en el punto de equilibrio (0, 0). Una función de Lyapunov que nos permite demostrar que tiene dicha propiedad es V (x, y) = x4 + y 2 , pues V̇ (x, y) = −x6 − y 4 < 0 para todo (x, y) 6= (0, 0). Note que su linealizado es inestable (ver Ejemplo 3.2). Ejemplo 3.7. Consideremos el sistema ẋ = y + x3 , ẏ = −x + y 3 . Con la función de Lyapunov V (x, y) = x2 + y 2 se puede verificar que el punto de equilibrio (0, 0) es inestable. Por el contrario, su sistema linealizado es estable. 37 4 Aplicaciones 4.1. Modelo IS-LM Ejemplo 4.1 (Modelo IS-LM). Consideremos una economía cerrada en donde: 1. La tasa de ingreso nacional x(t) en el instante t varía a una proporción constante del excedente de la demanda agregada D respecto a la oferta agregada S, es decir dx = h(D − S), (4.1) dt donde h es la velocidad de ajuste constante para el ingreso. 2. La tasa de interés y(t) en el instante t varía a una proporción constante del excedente de la demanda de dinero L(x) respecto al monto M ofertado por el Banco Central, esto es dy = m(L(x) − M ), (4.2) dt donde m es la velocidad de ajuste constante para el interés. 3. La demanda agregada es la suma del consumo C(x) = cx y la inversión I(y) = −ay, D = cx − ay, donde c y a son constantes tales que 0 < c < 1 y a > 0. El parámetro c se conoce como la propensión marginal a consumir y s := 1−a es la propensión marginal a ahorrar. 4. La demanda de dinero es una función lineal del ingreso, L(x) = kx, para alguna constante k > 0. Esto significa que la demanda de dinero es solo para fines de transacción. 38 4 Aplicaciones Finalmente, haciendo h = m = 1 y S = x (la oferta agregada es igual al ingreso nacional), simplificando las ecuaciones (4.1) y (4.2) con los supuestos 3) y 4), llegamos a la ecuación diferencial que modela esta economía dx dt dy dt = −sx − ay, = kx − M. 4.2. Carrera armamentista Ejemplo 4.2. Suponga que x(t) e y(t) representan el gasto en armamentos de dos países X e Y . Se asumen los siguientes hechos: 1) el gasto de cada país aumenta a una tasa proporcional al gasto del otro país, 2) el gasto de cada país disminuye a una tasa proporcional a su propio gasto, 3) la tasa de cambio del gasto en armas para cada país tiene un componente constante que depende del nivel de antagonismo entre ellos, 4) el efecto de los supuestos es aditivo. La ecuación diferencial que modela los supuestos anteriores es dx dt dy dt = ay − px + r = bx − qy + s donde a, b, p, q son constantes positivas, mientras que r y s son constantes arbitrarias (negativo si se tienen confianza y positivo si son antagónicos). 39 4 Aplicaciones 4.3. Explotación de recursos Ejemplo 4.3. Denotemos con x(t) a la población de pescadores y con y(t) la población de peces en un lago. El lago recibe una cantidad S(t) = S0 (1 − cos(t)) de agua por las lluvias, el cual influye positivamente en el incremento de la población de peces. Supongamos que ambas poblaciones al interactuar evolucionan de acuerdo a la ecuación diferencial dx dt dy dt = cy − dx, = ay − bx + S(t), donde a y d son parámetros que miden la diferencia entre la tasa de nacimiento y mortalidad de los pescadores y los peces, respectivamente, b es una constante positiva de manera que el incremento en la población de pescadores causa la disminución en la población de peces, c es una constante positiva que indica que la población de pescadores crece cuando la cantidad de peces aumenta. 4.4. Modelos de crecimiento Ejemplo 4.4 (R. Goodwin, 1967). Supongamos que x(t) es la tasa de empleo y y(t) la participación de salarios en el producto. El modelo de ciclo de crecimiento de R. Goodwin está dado por el siguiente sistemas de ecuaciones diferenciales dx 1 1 = x − (α + β) − y , dt σ σ dy = y (ρx − (α + γ)) , dt 40 4 Aplicaciones donde σ es la relación capital-producto, α es la tasa de crecimiento de la población, β es la tasa de crecimiento de la productividad laboral, ρ es la pendiente de la recta de Philips y γ es la intersección de dicha recta en el eje vertical. 41 A Forma Jordan de matrices Definición A.1. Dos matrices A y B son semejantes (o linealmente conjugadas) si existe una matriz P invertible tal que B = P −1 AP. (A.1) Teorema A.1. Una matriz real de tamaño 2 × 2 es semejante exactamente a una de las siguientes matrices λ1 0 λ 1 a −b J1 = , J2 = , J3 = . 0 λ2 0 λ b a Ejemplo A.1. Calculemos la forma canónica de Jordan de las matrices 2 1 1 6 −1 −2 a) A = , b) B = , c) C = . 6 3 −6 −11 9 5 Los valores propios de son λ1 = 0 yλ2 = 5, sus vectoA −1 1 res propios son v1 = y v2 = , respectivamente. 2 3 La matriz de cambio de base tiene como columnas a los vectores propios −1 1 P = [v1 v2 ] = 2 3 cuya inversa es P −1 = 1 5 42 −3 2 1 . 1 A Forma Jordan de matrices Por lo tanto la forma canónica Jordan de la matriz A es 1 −3 1 2 1 −1 2 0 0 = . J = P −1 AP = 6 3 1 3 0 5 5 2 1 La matriz Btieneun único valor propio λ = −5 y su vector −1 propio v = . Su vector propio generalizado es vg = 1 −1/6 . La matriz de cambio de base tiene como columnas 0 al vector propio y el vector propio generalizado −1 −1/6 0 1 −1 P = , P = . 1 0 −6 −6 Entonces la forma canónica de Jordan es 0 1 1 6 −1 −1/6 −5 J= = −6 −6 −6 −11 1 0 0 1 . −5 La matriz C tiene valores propios complejos λ1 = 2 + 3i y λ2 = 2 − 3i. El vector propio asociado a λ1 es −1 + i −1 1 v1 = = +i . 3 3 0 La matriz de cambio de base tiene como columnas a la parte real y parte imaginaria del vector propio 1 0 1 −1 1 −1 P = , P = . 3 0 3 3 1 Entonces la forma canónica de Jordan es 1 0 1 −1 −2 −1 1 2 J= = 9 5 3 0 −3 3 3 1 3 . 2 43 B Exponencial de matrices Definición B.1. Sea A una matriz 2 × 2. Entonces para t ∈ R, eAt := I + At A2 t2 A3 t3 + + + ··· . 1! 2! 3! (B.1) Lema B.1. Si A y B son matrices semejantes, es decir, existe P invertible tal que B = P −1 AP , entonces etA = P etB P −1 . (B.2) Lema B.2. Si N y S son matrices tales que N S = SN , entonces eN +S = eN eS . Teorema B.3. Considere las siguientes matrices λ1 0 λ 1 a −b J1 = , J2 = y J3 = . 0 λ2 0 λ b a Entonces e tJ1 etJ1 etJ1 etλ1 0 = , 0 etλ2 1 t = etλ , 0 1 cos bt − sin bt = eat . sin bt cos bt 44 (B.3) C Teorema fundamental de sistemas lineales Teorema C.1. Sea A una matriz 2 × 2. Dado x0 ∈ R2 , el problema de valor inicial ẋ = Ax, x(0) = x0 tiene una solución única dada por x(t) = etA x0 . Teorema C.2. Sea A una matriz 2×2. Dado x0 ∈ R2 , considere el problema de valor inicial ẋ = Ax, x(0) = x0 . λ1 0 1. Si A es semejante a la matriz para algún λ1 , λ2 ∈ 0 λ2 R, entonces tλ e 1 0 x(t) = P P −1 x0 . 0 etλ2 λ 1 2. Si A es semejante a la matriz para algún λ ∈ R, 0 λ entonces 1 t tλ x(t) = e P P −1 x0 . 0 1 a −b 3. Si A es semejante a la matriz para a, b ∈ R, b a entonces cos bt − sin bt x(t) = eat P P −1 x0 . sin bt cos bt 45 Bibliografía [1] Hirsch, M. W., Smale, S. (1974). Differential equations, dynamical systems, and linear algebra. Academic press. [2] Perko, L. (2013). Differential equations and dynamical systems (Vol. 7). Springer Science & Business Media. [3] Tu, P. N. (2012). Dynamical systems: an introduction with applications in economics and biology. Springer Science & Business Media. 46