")
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
1. Objeto de conocimiento
Funciones vectoriales de variable real
Denición. Límite. Continuidad. Derivada. Vector tangente unitario. Integrales. Longitud de arco. Curvatura. Plano normal.
2. Descriptores de contenidos
El estudiante
[los conceptos de límite, continuidad, derivada e integral de funciones vectoriales
de una variable real; vector tangente, curvatura y plano normal], [reconociendo] [tópicos
estudiados en Análisis Matemático I y Álgebra], [para argumentar] [sus desarrollos de
manera coherente y sólida].
[Analiza]
[indicadores de desempeño propuestos] [probando] [hipótesis], [aplicando] [propiedades] y [relacionando] [datos y conceptos], [para elaborar] [una producción escrita con
lenguaje matemático adecuado, notación pertinente y justicación de procedimientos y resultados presentados].
[Resuelve]
3. Bibliografía de referencia
Rogawski 14.1-2-3-4;
Stewart 13.1-2-3
4. Lectura analítica disciplinar y ejemplos de ilustración
4.1. Exordio
Una representación intuitiva de lo que es una curva surge al imaginar el camino que recorre
un móvil o partícula, de acuerdo a una trayectoria que sigue una dirección u orientación. Esto nos
lleva a pensar en una traza formada por puntos (en el plano o el espacio), visibles o no (del vuelo
de un insecto no quedan marcas, mientras sí es posible visualizar la estela que deja un avión de
acrobacias).
A medida que el móvil se desplaza (supongamos en el espacio), va pasando por diferentes puntos
que se pueden identicar en un sistema de coordenadas como (x, y, z). Observamos que simultáneamente, mientras cambia de posición, el tiempo varía. Si consideramos el tiempo como un parámetro
variable t, identicamos cada punto como (x(t), y(t), z(t)). Asimismo, podemos indicar cada punto
como el extremo de un vector posición variable, que depende del parámetro. Discutiremos sobre
curvas, considerando la forma paramétrica y vectorial de describirlas.
4.2. Deniciones, Fundamentos y Referencias
Sea ⃗r una función vectorial de variable real, cuyo dominio es un intervalo I de valores reales
(cerrado, I = [a, b], o todo R) y para la cual su rango es un conjunto de vectores en Rn (para
Página 1 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
nuestro estudio n = 2 o n = 3).
⃗r : I ⊆ R → R2 ; ⃗r : I ⊆ R → R3
Si n = 3 (dos formas de expresión, de acuerdo a la bibliografía)
⃗r : I ⊆ R → R3 ; ⃗r(t) = ⟨x(t), y(t), z(t)⟩; t ∈ I
⃗r : I ⊆ R → R3 ; ⃗r(t) = ⟨f (t), g(t), h(t)⟩; t ∈ I
t es un parámetro real; x(t), y(t), z(t) son las componentes, funciones reales de una variable real.
El dominio de una función vectorial es la intersección de los dominios de sus funciones componentes. A cada valor del parámetro, ⃗r le asigna un vector posición de dos o tres componentes,
cuyo extremo identica un punto sobre una curva C (en el plano o en el espacio) que es la imagen
de la función vectorial.1
1. Plano: si x(t) y y(t) son funciones reales de una variable real denidas en un intervalo paramétrico (t ∈ I , o t ∈ R), la función vectorial ⃗r(t) = ⟨x(t), y(t)⟩ identica una
curva paramétrica en el plano, para la cual x(t) y y(t) expresan las ecuaciones paramétricas.
2. Espacio: si x(t), y(t), z(t) son funciones reales de una variable real denidas en un intervalo paramétrico (t ∈ I , o t ∈ R), la función vectorial ⃗r(t) = ⟨x(t), y(t), z(t)⟩ identica una
curva paramétrica en el espacio, para la cual x(t), y(t), z(t) expresan las ecuaciones paramétricas.
3. Modelo físico: si consideramos al parámetro como la magnitud tiempo, para cada valor de t,
se tiene un punto (x(t), y(t), z(t)) en el espacio. A medida que t varía, podemos imaginar un
móvil que se traslada describiendo una curva C . Dicha curva asociada a ⃗r(t), es el conjunto
de puntos trazados por los vectores posición ⃗r(t), que describe la trayectoria del móvil.
1 Referencias:
conceptos de
trayectoria parametrizada por ⃗r(t) y curva descripta por ⃗r(t); Rogawski 14.1, pág. 730,
ejemplos 1 y 3.
Página 2 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
4.3. Gráca de una función vectorial
Sea ⃗r una función vectorial de variable real denida en un intervalo I 2
⃗r : I ⊆ R → R3 ; ⃗r(t) = ⟨x(t), y(t), z(t)⟩; t ∈ I
El extremo del vector ⃗r(t) describe una trayectoria en R3 al variar t. ⃗r(t) es una parametrización
vectorial de una trayectoria, siendo x(t), y(t), z(t) sus ecuaciones paramétricas.
La imagen de la trayectoria es una curva (en el plano o en el espacio), conjunto de puntos
(x(t), y(t), z(t))3 .
Ejemplos de funciones vectoriales y ecuaciones paramétricas
1. x(t) = t, y(t) = t2 + 1
Función vectorial ⃗r(t) = ⟨t, t2 + 1⟩, expresión paramétrica de la función y(x) = x2 + 1 cuya
gráca es una parábola.
2. x(t) = a cos (t), y(t) = a sen (t)
Función vectorial ⃗r(t) = ⟨a cos (t), a sen (t)⟩; la gráca es una circunferencia de radio a centrada en (0, 0).
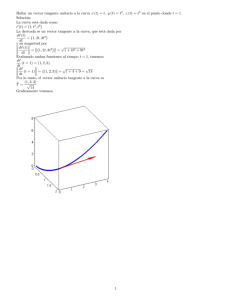
3. x(t) = cos t, y(t) = sen t, z(t) = t
Función vectorial ⃗r(t) = ⟨cos t, sen t, t⟩; la gráca es una hélice.
4. x(t) = cos (2t), y(t) = sen (2t), z(t) = 2t
Función vectorial ⃗r(t) = ⟨cos (2t), sen (2t), 2t⟩; la gráca es una hélice recorrida a mayor
velocidad: la parametrización ha cambiado.
5. x(t) = cos (−t), y(t) = sen (−t), z(t) = −t
Función vectorial ⃗r(t) = ⟨cos (−t), sen (−t), − t⟩ y la gráca es una hélice, recorrida con
orientación opuesta.
2 Presentaremos
3 Usamos
los casos en
R3 ,
válido también en
R2 .
paréntesis clásicos para indicar puntos y paréntesis angulares para indicar vectores
Página 3 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
6. Dados dos puntos P0 (x0 , y0 , z0 ), P1 (x1 , y1 , z1 ) ∈ R3 en , denimos el segmento de recta de
extremos P0 y P1 con la función vectorial
⃗r(t) = ⟨x0 + t(x1 − x0 ), y0 + t(y1 − y0 ), z0 + t(z1 − z0 )⟩; t ∈ [0, 1]
7. Analizar diferentes parametrizaciones de una misma curva. Lectura recomendada: Rogawski,
cap. 12, pág. 617, ejemplo 6.
Importante
Si es posible despejar el parámetro t, se obtiene la ecuación de una curva plana o dos ecuaciones
de una curva en el espacio.
a ) Ejemplo (circunferencia de radio unitario centrada en el origen)
x(t) = cos (t), y(t) = sen (t) → x2 + y 2 = 1
b ) Ejemplo (espiral como intersección de dos supercies)
x(t) = cos (t), y(t) = sen (t), z(t) = t → x = cos (z), y = sen (z)
4.4. Límite y continuidad de una función vectorial
Sea ⃗r una función vectorial de variable real denida en un intervalo I
⃗r : I ⊆ R → R3 ; ⃗r(t) = ⟨x(t), y(t), z(t)⟩; t ∈ I
⃗r(t) tiene límite ⃗u (vector) cuando t → t0 si
lı́m ∥⃗r(t) − ⃗u∥ = 0; lı́m ⃗r(t) = ⃗u
t→t0
t→t0
Página 4 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
4.4.1.
R2
y
R3 .
Cálculo
Se calcula el límite de cada función componente y deben existir todos para que exista el límite
de la función vectorial.
D
E
lı́m ⃗r(t) =
lı́m x(t), lı́m y(t), lı́m z(t)
t→t0
4.4.2.
t→t0
t→t0
t→t0
Continuidad
Una función vectorial ⃗r(t) es continua en t = t0 ∈ I si lı́mt→t0 ⃗r(t) = ⃗r(t0 ).
Las funciones componentes deben ser continuas.
4.5. Derivada de una función vectorial
Sea ⃗r una función vectorial de variable real denida en un intervalo I
⃗r : I ⊆ R → R3 ; ⃗r(t) = ⟨x(t), y(t), z(t)⟩; t ∈ I
Se incrementa t en h ̸= 0, se obtiene ⃗r(t + h) y se calcula el vector diferencia ⃗r(t + h) − ⃗r(t).
Estudiamos la siguiente expresión (producto de un escalar por un vector) como un cociente
incremental
i
1 h
⃗r(t + h) − ⃗r(t)
h
Se calcula el límite de dicho cociente incremental
i
1 h
⃗r(t + h) − ⃗r(t)
h→0 h
lı́m
Si existe este límite, r(t) es derivable en t y ese límite es la derivada de la función vectorial r(t).
⃗r ′ (t) =
i
d
1 h
⃗r(t) = lı́m
⃗r(t + h) − ⃗r(t)
h→0 h
dt
⃗r(t) es derivable si sus componentes son derivables y su derivada es un vector4
⃗r ′ (t) = ⟨x′ (t), y ′ (t), z ′ (t)⟩
4.5.1.
4 Son
Interpretación geométrica
válidas las reglas de derivación conocidas. Ver Rogawski 14.2, pág. 739/40.
Página 5 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
⃗r(t0 ) : vector posición del punto A(x(t0 ), y(t0 ), z(t0 ))
⃗r(t0 + h) : vector posición del punto B(x(t0 + h), y(t0 + h), z(t0 + h))
Si h → 0, el vector diferencia ⃗r(t0 + h) − ⃗r(t0 ) tiende a un vector con origen en A: el vector
⃗r ′ (t0 ). Si ⃗r ′ (t0 ) existe y ⃗r ′ (t0 ) ̸= ⃗0 en el punto, entonces se interpreta geométricamente como el
vector tangente a la curva en A.
Importante
La recta que pasa por A y que tiene la dirección del vector tangente, es la recta tangente a la
curva en A.
Si ⃗r(t) es derivable, en los puntos donde ⃗r ′ (t) ̸= ⃗0 existe T⃗ (t), vector tangente unitario que
indica la dirección de la curva.
T⃗ (t) =
4.5.2.
1
∥⃗r
′ (t)∥
· ⃗r ′ (t)
Interpretación física
⃗r(t): función vectorial cuya imagen es una curva5 que representa el desplazamiento de un móvil
(partícula) que sigue una trayectoria6 en R2 o R3 .
⃗r ′ (t) (si existe): función vectorial que representa la velocidad del móvil en su trayectoria.
Evaluada en un punto es la velocidad instantánea. Es un vector tangente a la curva e indica su
dirección.
∥⃗r ′ (t)∥: celeridad o rapidez.
⃗r ′′ (t) (si existe): función vectorial que representa la aceleración del móvil.
4.5.3.
Curva suave
Sea ⃗r una función vectorial de variable real denida en un intervalo I
⃗r : I ⊆ R → R3 ; ⃗r(t) = ⟨x(t), y(t), z(t)⟩; t ∈ I
con x(t), y(t), z(t) funciones con derivada de primer orden continua en I , ⃗r ′ (t) ̸= ⃗0 ∀t ∈ I
(excepto quizás en los extremos).
Si se cumplen estas hipótesis en todo el intervalo, decimos que la curva descripta por ⃗r(t) es
una curva suave. En cada punto de la misma es posible trazar un vector tangente que indica la
dirección de la curva (cambia de dirección suavemente, sin puntas ni cúspides). Si la curva está
formada por tramos suaves unidos en esquinas, decimos que es suave a trozos.
5 Lugar
geométrico
6 Recorrido,
orientación
Página 6 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
4.6. Integral de una función vectorial
Sea ⃗r una función vectorial de variable real denida en un intervalo I = [a, b]
⃗r : I ⊂ R → R3 ; ⃗r(t) = ⟨x(t), y(t), z(t)⟩; t ∈ I
x(t), y(t), z(t) son funciones continuas en I (son continuas, luego son integrables).
Expresamos la integral de ⃗r(t) como un vector cuyas componentes son las integrales de las
funciones componentes de ⃗r, para a ≤ t ≤ b.
Z b
Z b
Z b
Z b
⃗r(t) dt =
x(t) dt ⃗i +
y(t) dt ⃗j +
z(t) dt ⃗k
a
a
a
a
⃗
⃗ ′ (t) = ⃗r(t).
Una primitiva de ⃗r(t) es una función vectorial R(t)
tal que R
Z
⃗ + C,
⃗ siendo C
⃗ = ⟨c1 , c2 , c3 ⟩, vector de constantes
⃗r(t) dt = R(t)
Z
Z
Z
x(t) dt = X(t) + c1 ,
y(t) dt = Y (t) + c2 ,
z(t) dt = Z(t) + c3
Z
⃗r(t) dt = (X(t) + c1 ) ⃗i + (Y (t) + c2 ) ⃗j + (Z(t) + c3 ) ⃗k
Z
⃗r(t) dt = X(t) ⃗i + Y (t) ⃗j + Z(t) ⃗k + (c1 ⃗i + c2 ⃗j + c3 ⃗k)
|
{z
}
⃗
C
4.7. Longitud de arco
Cuando una curva es suave en un intervalo, su longitud es medible. Expresamos un método
para su cálculo.
Sea C una curva suave en R3 (generalizamos), imagen de una función vectorial de variable real
⃗r denida en un intervalo I = [a, b], cuyas funciones componentes tienen derivadas de primer orden
continuas en I (derivables con continuidad).
Al recorrer la curva exactamente una vez mientras t varía entre a y b siguiendo la dirección del
vector tangente (curva suave), es posible calcular la longitud de la curva desde t = a hasta t = b.
Hipótesis
⃗r : I ⊂ R → R3 ; ⃗r(t) = ⟨x(t), y(t), z(t)⟩; t ∈ I = [a, b]
C : Curva suave, imagen de ⃗r(t)
⃗r ′ (t) existe y es continua en [a, b], con ⃗r ′ (t) ̸= ⃗0 ∀t ∈ [a, b]
Se estudia una poligonal (aproximación a la longitud de la curva) entre a y b. Si la longitud de
cada segmento de la poligonal tiende a cero, calculando el límite de la sumatoria de las longitudes
de los segmentos y aplicando el Teorema del Valor Medio se obtiene:
Z
L=
a
b
Z bp
[x′ (t)]2 + [y ′ (t)]2 + [z ′ (t)]2 dt
∥⃗r (t)∥ dt =
′
a
Página 7 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
4.8. Función longitud de arco
Dado que ⃗r ′ (t) (vector tangente) indica la dirección de una curva, la longitud de arco surge
intuitivamente de la forma de la curva. Con las mismas hipótesis ya enunciadas, consideramos un
punto base P0 sobre una curva suave
C , punto en el cual t = a. Cada valor de t determina un punto
sobre la curva: P(t) x(t), y(t), z(t) . Consideramos una distancia dirigida sobre C , medida desde
el punto base: la función longitud de arco s(t)
Z
s(t) =
t
Z tp
∥⃗r (u)∥ du =
[x′ (u)]2 + [y ′ (u)]2 + [z ′ (u)]2 du
′
a
a
Esta es la expresión de una función s(t), estrictamente creciente, que toma como parámetro la
longitud de arco de de la curva C (u es una variable auxiliar para la integración).
Relación importante
t
Z
∥⃗r ′ (u)∥ du
s(t) =
a
Derivando con respecto a t, aplicando Teorema Fundamental del Cálculo y regla de Barrow
ds
= ∥⃗r ′ (u)∥
dt
t
a
= ∥⃗r ′ (t)∥ − ∥⃗r ′ (a)∥
| {z }
Constante
El lado derecho depende solamente de t, por lo tanto
ds
= ∥⃗r ′ (t)∥ → ds = ∥⃗r ′ (t)∥ dt
dt
5. Curvatura (de exión) de una curva
Estudiamos desde lo formal y analítico lo que se conoce como curva cerrada o abierta.
Sea ⃗r una función vectorial de variable real
⃗r : I ⊂ R → R3 ; ⃗r(t) = ⟨x(t), y(t), z(t)⟩; t ∈ I = [a, b]
Las componentes de ⃗r son funciones derivables con continuidad en I ; ⃗r ′ (t) existe y es continua
en [a, b], con ⃗r ′ (t) ̸= ⃗0 ∀t ∈ [a, b], por lo tanto C es una curva suave, imagen de ⃗r(t).
La dirección de la curva está dada por el vector tangente unitario T⃗ (t) =
1
∥⃗r
′ (t)∥
· ⃗r ′ (t). En los
puntos donde T⃗ cambia bruscamente de dirección se observa que la curva es más cerrada.
Página 8 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
La magnitud (escalar) de la razón de cambio del vector tangente respecto de la longitud de arco
se denomina curvatura de exión (κ) de la curva, y expresa la medida de la rapidez con la cual la
curva cambia de dirección (cuánto se dobla la curva).
κ=
dT⃗
∥T⃗ ′ (t)∥
;κ ≥ 0
; κ(t) =
ds
∥⃗r ′ (t)∥
Cálculo de κ: sea ⃗r una función vectorial dos veces diferenciable. κ se expresa como
κ(t) =
∥⃗r ′ (t) × ⃗r ′′ (t)∥
∥⃗r ′ (t)∥3
6. Plano Normal a una curva
Cuando un móvil se traslada en el espacio describiendo una curva, sigue la dirección del vector
tangente a la misma. Consideramos un plano que se encuentra perpendicular a dicha dirección,
formado por todas las rectas ortogonales al vector tangente. Se denomina plano normal y el vector
tangente a la curva es su vector normal.
Sea una curva suave C ⊂ R3 , imagen de una función vectorial diferenciable ⃗r(t), que pasa por
un punto P0 (x0 , y0 , z0 ) para el cual el vector posición es ⃗r(t0 ) ̸= ⃗0. La ecuación del plano normal a
la curva C que pasa por P0 y que tiene por vector normal ⃗r ′ (t0 ) es
(⃗r(t) − ⃗r(t0 )) · ⃗r ′ (t0 ) = 0
Si a, b, c son las componentes de ⃗r ′ (t0 ) la ecuación del plano es
a(x − x(t0 )) + b(y − y(t0 )) + c(z − z(t0 )) = 0
7. Ejemplos
1. Exprese el dominio de ⃗r(t) =
√
4 − t2 ⃗i + t2 ⃗j − 6t ⃗k .
2. Identique las funciones componentes, determine
√ el dominio y calcule el límite para t → 0 de
⃗
⃗
la función vectorial ⃗r(t) = ln (t + 1) i + 9t j + 2 − t ⃗k . Graque el dominio.
h
3. Resuelva lı́m sen t ⃗i + (t2 + 1) ⃗j +
t→0
1 ⃗i
k
t
4. Calcule la derivada de la función ⃗r(t) = t3 ⃗i + 2t ⃗j + sen t ⃗k .
5. Para la función vectorial ⃗r(t) = t2 ⃗i + 1t ⃗j , exprese el vector tangente unitario T⃗ (t) y la
ecuación de la recta tangente en el punto donde t = 2.
6. Calcule
R2
⃗r(t) dt, para ⃗r(t) = t2 ⃗i + t3 ⃗j + t4 ⃗k .
−2
7. Si ⃗r ′ (t) = ⟨1 − 2t, 4t⟩, con ⃗r(0) = ⟨3, 1⟩, determine ⃗r(t).
8. Sea la función vectorial ⃗r(t) = cos t⃗i + sen t ⃗j + t⃗k . Calcule la longitud del arco de curva C ,
gráca de ⃗r(t), para 0 ≤ t ≤ 2π .
Página 9 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
9. Para la función vectorial ⃗r(t) = cos (4t)⃗i + sen (4t) ⃗j + 3t⃗k , exprese la función longitud de arco
⃗r(s) considerando el valor inicial t = 0.
10. Halle la curvatura de una circunferencia de radio a y obtenga conclusiones sobre el resultado.
11. Sea la función ⃗r(t)t ⃗i − t2 ⃗j + t3 ⃗k . Exprese la ecuación del plano normal a la curva imagen
de ⃗r en el punto para el cual t = 1.
12. Exprese la ecuación del plano normal a la curva dada por la función ⃗r(t) = cos t ⃗i+sen t ⃗j +t ⃗k
en el punto P(0, 1, π2 ).
8. Curva como intersección de dos supercies
Cuando dos supercies se intersectan, se obtiene una curva en R3 . Para ello se deben identicar
las supercies, aplicar un método de sustitución de variables y parametrizar convenientemente.
Ejemplos
Intersección de dos planos
Sean los planos de ecuación x + y + z = 1 y y − z = 2. Sustituyendo: z = y − 2 → x = 3 − 2y
(se obtiene una proyección en el plano z = 0). Parametrizando: y = t; x = 3 − 2t; z = t − 2.
Expresamos la función vectorial ⃗r(t = ⟨3 − 2t, t, t − 2⟩, cuya imagen es una recta en R3 .
Intersección de cilindro y plano
Sea el cilindro x2 + y 2 = 1 y el plano y + z = 2. Expresamos la función vectorial ⃗r(t) =
= ⟨cos t, sen t, 2 − cos t⟩.
9. Indicadores de Desempeños Sugeridos
1. Determine el dominio de:
2 ⃗ √
i + 3 − t ⃗j + ln | (4 − t) | ⃗k
t−4
1 ⃗
b ) ⃗r2 (t) = (t2 − 2t) ⃗i + t+1
j + ln (t − 1) ⃗k
a ) ⃗r1 (t) =
3
c ) ⃗r3 (t) = t ⃗i + t ⃗j + t 2 ⃗k
√
1 ⃗
j + (t − 5) ⃗k . Estudie la continuidad en t = 0.
t+6
√
e ) ⃗r5 (t) = t3 ⃗i + ln (3 − t) ⃗j + t ⃗k. Graque el dominio.
d ) ⃗r4 (t) = 25 − t2 ⃗i +
2. Si existen los siguientes límites, calcúlelos y justique su desarrollo.
h
a ) lı́m t2 ⃗i + 3t ⃗j +
t→0
1 − cos t ⃗ i
k
t
Página 10 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
b ) lı́m
t→0
h sen (2t)
t
⃗i + et ⃗j + e−t ⃗k
R2
y
R3 .
i
c ) lı́m [ln (t3 ) ⃗i + (t2 ln t) ⃗j + t ⃗k]
t→0
i
h√
ln t ⃗
2 ⃗
⃗
j + 2t k
d ) lı́m t i + 2
t→1
t −1
3. Determine para qué valores de t es continua la función vectorial propuesta:
a ) ⃗r(t) = sen2 t ⃗i + cos t ⃗j + tan t ⃗k
1 ⃗
k
b ) ⃗r(t) = tan t ⃗i+ | t + 3 | ⃗j + t−2
√
√
c ) ⃗r(t) = t ⃗i + t − 1 ⃗j
√
√
d ) ⃗r(t) = 8 ⃗i + t ⃗j + 3 t ⃗k
4. Sea la función vectorial ⃗r(t) = t2 ⃗i + t ⃗j .
a ) Bosqueje la curva denida por dicha función para t ∈ [0, 4].
b ) Calcule y graque junto a la curva los vectores ⃗r(1) y ⃗r ′ (1).
c ) Determine la ecuación de la recta tangente en (1, 1).
5. Sean las curvas C1 , C2 y C3 dadas por:
C1 : ⃗r1 (t) = t2 ⃗i + t8 ⃗j + t5 ⃗k
C2 : ⃗r2 (t) = cos t ⃗i + (sen t − t) ⃗j + 2π ⃗k
C3 : ⃗r3 (t) = (t7 + t) ⃗i + t2 ⃗j + t6 ⃗k
Identique cuál de las tres curvas es suave en (−∞, +∞).
6. Una partícula se mueve en el espacio describiendo una curva cuya ecuación vectorial es ⃗r(t) =
= et ⃗i + e−t ⃗j + cos t ⃗k . En el instante t = 1 continúa su vuelo siguiendo la dirección de la
tangente a la curva. Determine en qué posición se encuentra cuando t = 3.
7. Realice los cálculos correspondientes para determinar ⃗r(t) sabiendo que ⃗r ′ (t) = (2t + 1) ⃗i +
+ cos t ⃗j − et ⃗k , con ⃗r(0) = −⃗i + π ⃗j + 3 ⃗k .
8. Un móvil se desplaza por el espacio describiendo una curva C . El movimiento se inicia en
t = 0 desde la posición (1, 2, 3) y la velocidad está dada por ⃗v (t) = −t ⃗i − t ⃗j − t ⃗k . Determine
la función ⃗r(t) que representa la curva C .
9. Halle una función vectorial que dena las curvas propuestas e indique sus ecuaciones paramétricas.
a ) y = 4 − x2
b ) y = −x2 − 3
c ) (x + 2)2 + (z − 3)2 = 1
Página 11 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
10. Calcule la longitud de la trayectoria que describe un móvil si su posición en cada instante t
1 3
está dada por la función vectorial ⃗r(t) = cos t ⃗i + t 2 ⃗j + sen t ⃗k , para t ∈ [0, 12].
3
11. Sea la curva C dada por la función vectorial ⃗r(t) = cos (2t) ⃗i + et ⃗j + sen t ⃗k . Calcule la
curvatura de C aplicando la denición y verique con un método alternativo.
12. Halle T⃗ en t = 0 para la curva ⃗r(t) = sen t ⃗i + cos t ⃗j + t2 ⃗k .
13. Sea C una curva suave en R3 denida por la función vectorial ⃗r(t) = 2 cos t ⃗i + 2 sen t ⃗j + t ⃗k ,
0 ≤ t ≤ 4π .
a ) Encuentre el vector tangente unitario en el punto (2, 0, 0) y las ecuaciones paramétricas
de la recta tangente a la curva en dicho punto.
b ) Calcule la longitud de arco de C .
c ) Encuentre la función longitud de arco s(t) y reparametrice la curva con respecto a la
longitud de arco.
14. Un ave se desplaza describiendo una curva que puede expresarse como ⃗r(t) = t ⃗i + cos t ⃗j +
+ sen t ⃗k . Determine la longitud recorrida entre t = 0 y t = 1, el vector T⃗ (t) y la curvatura
κ(t).
15. Halle las ecuaciones paramétricas de la recta tangente y la ecuación general del plano normal
a la curva de ecuación ⃗r(t) = t ⃗i + t2 ⃗j + t3 ⃗k en el punto (1, 1, 1).
16. Sea C la curva denida por la función vectorial ⃗r(t) = ln t ⃗i + cos (πt) ⃗j + sen (πt) ⃗k . Exprese
las ecuaciones paramétricas de la recta tangente a la curva en el punto (0, −1, 0).
2t 1 − t2 ⃗i +
⃗j + ⃗k describe el movimiento de una partícula.
17. La función ⃗r(t) =
1 + t2
1 + t2
Demuestre que los vectores imagen de dicha función son perpendiculares a los vectores que
representan la velocidad de la partícula.
18. Un avión se eleva desde una altitud de 4 millas hasta 4.2 millas. La ecuación vectorial de la
curva que describe en su movimiento es ⃗r(t) = 10 cos (10πt) ⃗i + 10 sen (10πt) ⃗j + (4 + 4t) ⃗k .
Calcule la longitud de la trayectoria que describe durante la maniobra, estando t en horas y
las distancias en millas.
19. Halle las ecuaciones paramétricas de la recta tangente y la ecuación general del plano normal
a la curva de ecuación ⃗r(t) = e−2t ⃗i + e−t ⃗j + t ⃗k en el punto determinado por ⃗r(0)
20. Indique si la siguiente proposición es verdadera o falsa, justicando su respuesta.
La curva de ecuación vectorial ⃗r(t) = t3 ⃗i + 2t3 ⃗j + 3t3 ⃗k es una recta.
21. Escriba la expresión de la función vectorial ⃗r(t) que representa la posición de una partícula en
cada instante t, sabiendo que parte de la posición inicial ⃗r(0) =< 1, 0, 0 > y que se desplaza
con velocidad ⃗v (t) = t ⃗i + et ⃗j + e−t ⃗k
Página 12 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
22. Considere la curva H, imagen de la función vectorial ⃗r(t) = cos t ⃗i + sen t ⃗j + t ⃗k . Verique que
es una hélice, determine la distancia desde el punto (1, 0, 0) hasta el punto de coordenadas
(cos t, sen t, t) y reparametrice la curva aplicando la función longitud de arco ⃗r(s).
23. Sea la función vectorial ⃗r(t) = sen (4t) ⃗i + cos (4t) ⃗j + 3t ⃗k (hélice). Si t representa el tiempo,
determine:
a)
b)
c)
d)
e)
La expresión del vector velocidad ⃗v (t).
El vector tangente unitario T⃗ (t).
La longitud de arco de curva comprendido entre los puntos donde t = 0 y t = π .
La curvatura κ(t).
Demuestre que la curva forma un ángulo constante con la dirección vertical dada por el
vector ⃗k .
24. Exprese la función vectorial que dene la curva intersección entre la supercie z = x2 + y 2
con los planos x = 0; y = 0; z = 3; y = x.
25. Exprese las ecuaciones paramétricas y vectorial de la curva intersección entre el cilindro
x2 + y 2 = 4 y la supercie de ecuación z = xy .
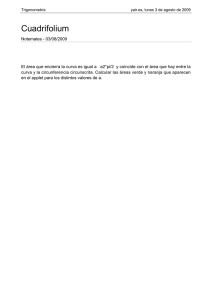
Desafío
Observe una curva plana denominada
epicicloide, dada por la función vectorial
⃗r(t) = ⟨(5 cos t−cos (5t)), (5 sen t−sen (5t))⟩
0 ≤ t ≤ 2π
a ) Exprese las coordenadas del punto P que corresponde al valor de ⃗r( π4 ).
b ) Calcule y graque ⃗r ′ ( π4 ) con origen en P .
c ) Determine la ecuación de la recta tangente a la curva en P . Bosqueje la recta en la
gráca.
d ) Indique en la misma gráca la orientación (el sentido en el cual el extremo del vector ⃗r
traza la curva).
e ) Exprese los intervalos en los cuales la epicicloide se comporta como una curva suave,
justicando su respuesta.
10. Actividades con Mathematica
1. Graque las curvas propuestas, considerando 0 ≤ t ≤ 4π
⃗r1 (t) = ⟨sen t, cos t, t⟩
Página 13 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
⃗r2 (t) = ⟨4 sen t, 4 cos t, t⟩
⃗r3 (t) = ⟨sen t, cos t, 3t⟩
⃗r4 (t) = ⟨sen (−t), cos (−t), t⟩
⃗r5 (t) = ⟨sen (5t), cos (5t), t⟩
⃗r6 (t) = ⟨1 + cos t, sen t, 2 sen ( 2t )⟩
⃗r7 (t) = ⟨e−3t , t2 cos (t3 ), t cos t⟩
Compare r⃗1 (t) con las curvas. r⃗2 a r⃗5 . Explique en cada caso qué cambios observa.
√
2. Sea la curva C descripta por la ecuación f (x) = 4x − x2 . Dena una función vectorial que
parametrice la curva y efectúe una representación gráca de C .
3. El vuelo de un insecto se modeliza con la función vectorial ⃗r(t) = 4 cos (2t) ⃗i + 4 sen (2t) ⃗j +
+4t ⃗k; 0 ≤ t ≤ 4π . En ese instante continúa su vuelo en la dirección de la recta tangente a
la curva.
a ) Graque la curva y la recta.
b ) Calcule la longitud total recorrida hasta dicho punto y la rapidez en ese momento.
c ) Al continuar su vuelo en la dirección de la recta tangente, identique el punto en el que
intersecta al plano x + y = 30.
4. Exprese y graque la función vectorial que dene la curva intersección entre las supercies
dadas.
a ) Cilindro x2 + y 2 = 4 y plano x + y + z = 1.
b ) Paraboloide z = 4x2 + y 2 y cilindro y = x2 .
c ) Cono z 2 = x2 + y 2 y plano z = 1 + y .
5. Sea la función vectorial ⃗r(t) = ⟨sen (πt), 2 sen (πt), cos (πt)⟩. Determine el punto de intersección entre las rectas tangentes a la curva imagen de ⃗r en los puntos donde t = 0 y t = 21 .
Graque la curva y las rectas.
Aún sin conocer los avatares de su vida, observe la curva y fundamente matemáticamente si es
correcto lo que dice el insecto.
Página 14 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
Anexo: algunas curvas notables
1.
a)
Circunferencia de centro (x0, y0) y radio r
Expresiones correspondientes a la ecuación cartesiana y a las ecuaciones paramétricas
de una circunferencia.
Cuadro 1
Ecuación cartesiana
2
2
(x − x0 ) + (y − y0 ) = r
Ecuaciones paramétricas
x = x0 + r cos(t)
y = y0 + r sen(t)
t ∈ [0, 2π]
2
1) Sea r = 1. Represente la curva utilizando las ecuaciones paramétricas y, considerando los valores de (x0 , y0 ) que se indican a continuación, interprete los cambios que
se producen en la curva.
(x0 , y0 ) = (−1, −2)
(x0 , y0 ) = (1, 2)
2) Sea el punto (x0 , y0 ) = (0, 0). Represente la curva utilizando las ecuaciones paramétricas y, considerando los valores de r que se indican a continuación, inteprete los
cambios que se producen en la curva.
r = 5.
r = 21 .
b)
Elipse de centro (x0, y0) y ejes a y b
En la siguiente tabla se muestran las ecuaciones que representan a una elipse.
Cuadro 2
Ecuación cartesiana
Ecuaciones paramétricas
x = x0 + a cos(t)
(x − x0 )2 (y − y0 )2
+
=1
a2
b2
y = y0 + b sen(t)
t ∈ [0, 2π]
1) Sean a = 1 y b = 2. Represente la curva utilizando las ecuaciones paramétricas
y considerando los valores de (x0 , y0 ) que se indican a continuación, interprete los
cambios que se producen en la curva.
(x0 , y0 ) = (0, 0)
(x0 , y0 ) = (−1, −2)
2) Sea el punto (x0 , y0 ) = (0, 0). Represente la curva utilizando las ecuaciones paramétricas y considerando los valores de a y b que se indican a continuación, interprete
los cambios que se producen en la curva.
a = 1; b = 3
a = 3; b = 1
Página 15 de 16
ANÁLISIS MATEMÁTICO II - PROPUESTA DIDÁCTICA PD 1/2022
Funciones Vectoriales de una variable real. Curvas en
R2
y
R3 .
a = 3; b = 3
3) Si a y b son iguales, identique la curva obtenida.
c)
Hipérbola
Las ecuaciones que se muestran en la siguiente tabla representan una hipérbola:
Cuadro 3
Ecuación cartesiana
Ecuaciones paramétricas
x = x0 + a sec(t)
(x − x0 )2 (y − y0 )2
−
=1
a2
b2
y = y0 + b tan(t)
−π π t∈
,
π2 3π2
,
t∈
2 2
1) Sean a = 1 y b = 1. Represente la curva utilizando las ecuaciones paramétricas
y considerando los valores de (x0 , y0 ) que se indican a continuación, interprete los
cambios que se producen en la curva.
(x0 , y0 ) = (0, 0)
(x0 , y0 ) = (2, 4)
2) Sea el punto (x0 , y0 ) = (0, 0). Represente la curva utilizando las ecuaciones paramétricas y considerando los valores de a y b que se indican a continuación, inteprete
los cambios que se producen en la curva.
a = 1; b = 2
a = 2; b = 1
Página 16 de 16