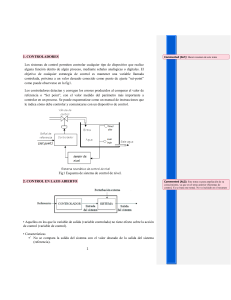
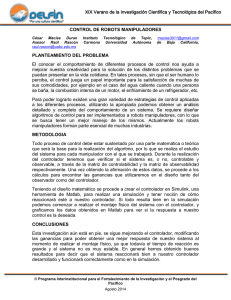
FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIVERSIDAD VERACRUZANA REGIÓN XALAPA E.E. CONTROL LINEAL Catedrático: Fernando Aldana Franco “Sistema térmico mezclado” Integrantes: Guerrero Jácome Arturo Lara Ayala Luis Eduardo Olalla Ake Rubén Iván Ortiz Aguilar Fidel Rafael Xalapa, Ver. 20 de noviembre de 2019 2 Índice Planteamiento del problema .............................................................................................................. 5 Objetivo general .................................................................................................................................. 5 Marco teórico ...................................................................................................................................... 5 Modelado matemático .................................................................................................................... 5 Contexto de solución....................................................................................................................... 7 Criterio de estabilidad del plano complejo ................................................................................. 7 Estabilidad absoluta .................................................................................................................... 8 Estabilidad relativa ...................................................................................................................... 8 Criterio de estabilidad de Routh-Horwitz ................................................................................... 8 Lugar Geométrico de las Raíces .................................................................................................. 8 Diagramas de Bode ..................................................................................................................... 8 Criterio de estabilidad de Nyquist ............................................................................................... 9 Controlador Proporcional-Integral-Derivativo ............................................................................ 9 Metodología ...................................................................................................................................... 10 Obtención de la función de transferencia..................................................................................... 10 Equivalente de lazo abierto........................................................................................................... 11 Primer caso................................................................................................................................ 11 Segundo caso............................................................................................................................. 12 Respuesta del sistema ................................................................................................................... 12 Primer caso................................................................................................................................ 12 Segundo caso............................................................................................................................. 15 Análisis en plano complejo para estabilidad ................................................................................. 18 Primer caso................................................................................................................................ 18 Segundo caso............................................................................................................................. 19 Lugar geométrico de las raíces ...................................................................................................... 20 Primer caso................................................................................................................................ 20 Segundo caso............................................................................................................................. 21 Componentes de estabilidad relativa ........................................................................................... 22 Primer caso................................................................................................................................ 22 Segundo caso............................................................................................................................. 23 Routh-Horwitz ............................................................................................................................... 23 3 Primer caso................................................................................................................................ 23 Primer caso................................................................................................................................ 24 Diagramas de Bode ....................................................................................................................... 25 Primer caso................................................................................................................................ 25 Segundo caso............................................................................................................................. 26 Criterio de estabilidad de Nyquist ................................................................................................. 28 Primer caso................................................................................................................................ 28 Segundo caso............................................................................................................................. 28 Controladores.................................................................................................................................... 29 Primer caso.................................................................................................................................... 29 Controlador P ............................................................................................................................ 29 Controlador PI ........................................................................................................................... 31 Controlador PID ......................................................................................................................... 32 Controlador PID de MATLAB ..................................................................................................... 34 Segundo caso ................................................................................................................................ 34 Controlador PID ......................................................................................................................... 34 Controlador PID de MATLAB ..................................................................................................... 36 Resultados ......................................................................................................................................... 37 Conclusiones ..................................................................................................................................... 37 4 Planteamiento del problema Diseñar un controlador para un sistema térmico mezclado, cuyas variables de entrada sean el cambio de temperatura del líquido que entra al tanque y el cambio de flujo de calor de entrada; mientras que la salida es la temperatura del líquido que sale del tanque. De igual forma, diseñar un controlador proporcional que maneje estas variables, tanto de entrada como de salida. Y con base sus resultados proponer la mejor alternativa. Objetivo general Haciendo uso de los conocimientos adquiridos durante el curso se definirá la estabilidad del sistema térmico mezclado, tanto en el dominio del tiempo como el de la frecuencia. Posteriormente se diseñará un controlador proporcional. Marco teórico Modelado matemático Considerando el siguiente sistema, suponiendo que el tanque está aislado para eliminar las pérdidas de calor hacia el aire circundante. También se supone que no hay almacenamiento de calor en el aislamiento y que el líquido del tanque está perfectamente mezclado, por lo que tiene una temperatura estable. De este modo, se usa una sola temperatura para describir la del líquido en el tanque y la del líquido que sale. Sean Θi = temperatura en estado estable del líquido que entra, ºC 5 Θo = temperatura en estado estable del líquido que sale, ºC G = velocidad de flujo del líquido en estado estable, kg/seg M = masa del líquido en el tanque, kg c = calor especifico del líquido, kcal/kgºC R= resistencia térmica, ºC seg/kcal C= capacitancia térmica, kcal/ºC H=entrada del flujo de calor en estado estable, kcal/seg Supóngase que la temperatura del líquido que entra se mantiene constante y que el flujo de calor de entrada al sistema cambia repentinamente de H a H + hi, donde hi representa un cambio pequeño en el flujo de calor de entrada. El flujo de calor de salida cambiara, entonces, de Θo a Θo + θ. Para este caso, ho, C y R se obtiene, respectivamente, como 𝐻𝑜 = 𝐺𝑐 𝜃 𝐶 = 𝑀𝑐 𝑅= 𝜃 1 = ℎ𝑜 𝐺𝑐 La ecuación diferencial para este sistema es 𝐶𝑑𝜃 = (ℎ𝑖 − ℎ0 )𝑑𝑡 Que pasa a ser 𝐶 𝑑𝜃 = ℎ𝑖 − ℎ0 𝑑𝑡 Y a su vez, reescribirse como 𝑅𝐶 𝑑𝜃 + 𝜃 = 𝑅ℎ𝑖 𝑑𝑡 La función de transferencia que relaciona θ con hi, se obtiene mediante Θ(𝑠) R = 𝐻𝑖(𝑠) 𝑅𝐶𝑠 + 1 Donde Θ(s)= L [θ(t)] y Hi(s)=L[hi(t)]. Si la temperatura del líquido que entra cambia repentinamente de Θi a Θi + θi, mientras que el flujo de calor de entrada H y el flujo de líquido G se conservan constantes, el flujo de calor de salida cambiará de H a H + ho y la temperatura del líquido que sale cambiará de Θo a Θo + θ. La ecuación diferencial para este caso es 6 𝐶𝑑𝜃 = (𝐺𝑐𝜃 − ℎ0 )𝑑𝑡 O bien 𝐶 𝑑𝜃 = 𝐺𝑐𝜃𝑖 − ℎ0 𝑑𝑡 Que se reescribe como 𝑅𝐶 𝑑𝜃 + 𝜃 = 𝜃𝑖 𝑑𝑡 La función de transferencia que relaciona θ y θi se obtiene mediante Θ(𝑠) 1 = Θ𝑖 (𝑠) 𝑅𝐶𝑠 + 1 Donde Θ(s)=L[θ(t)] y Θi(s)=L[θi(t)]. Si este sistema térmico está sujeto a cambios en la temperatura del líquido que entra y en el flujo de calor de entrada, en tanto que el flujo del líquido se conserva constante, el cambio θ en la temperatura del líquido que sale se obtiene mediante la ecuación siguiente: 𝑅𝐶 𝑑𝜃 + 𝜃 = 𝜃𝑖 + 𝑅ℎ𝑖 𝑑𝑡 El diagrama de bloques del sistema será: Contexto de solución Los análisis vistos en clase que se aplicarán en la resolución de este sistema son los siguientes: Criterio de estabilidad del plano complejo Este criterio de estabilidad se limita a analizar si el sistema es estable o no lo es, no aporta más información acerca de su comportamiento. El criterio dice que, si todas las raíces se encuentran en el semiplano izquierdo, el sistema es estable. Si se tiene por lo menos una 7 raíz sobre el eje imaginario, se tiene un sistema críticamente estable. Por otro lado. Si se tiene por lo menos una raíz en el semiplano derecho, el sistema es inestable. Estabilidad absoluta La estabilidad absoluta de un sistema representa la capacidad que tiene este para seguir una señal de entrada, esto quiere decir que la naturaleza de la señal de salida debe ser la misma que la naturaleza de la señal de entrada. En otras palabras, la estabilidad absoluta de un sistema nos indica que un sistema dejará de oscilar y anulará estas perturbaciones a la respuesta, entrando a una fase estable. Estabilidad relativa Los parámetros de estabilidad relativa son una herramienta de alta importancia para la caracterización de la respuesta del sistema. Una vez que se sabe que el sistema tiene estabilidad absoluta, el análisis de la estabilidad relativa mostrará parámetros como el tiempo de estabilización, el máximo pico, el amortiguamiento, entre otros. Criterio de estabilidad de Routh-Horwitz Este criterio se divide en dos consideraciones, el polinomio de Routh y la matriz de Horwitz. El polinomio de Routh nos indica que, si se tiene un cero o un cambio de signo en el denominador de la función de transferencia, el sistema es inestable. Por el contrario, si no se tiene ninguna de estas dos configuraciones, se cumple con el criterio de Routh, pero no se puede saber si el sistema es estable o no lo es hasta que se realice la matriz de Horwitz. La matriz de Horwitz se forma con los coeficientes del denominador de la función de transferencia del sistema. Una vez creada, se realizan los cálculos correspondientes y se analiza la columna principal. Si no se tiene un cambio de signo en dicha columna, el sistema es estable. De otra manera, cada cambio de signo en dicha columna representa una raíz ubicada en el semiplano derecho que provoca la inestabilidad del sistema. Lugar Geométrico de las Raíces El criterio de estabilidad del lugar geométrico de las raíces nos proporciona información acerca de la estabilidad del sistema, además de su comportamiento ante la presencia de diferentes valores de ganancia para el sistema. En un principio, funciona igual que criterio del plano complejo, demostrando si el sistema es estable, inestable o críticamente estable según la posición de los polos. Adicionalmente el LGR nos da información de cuál será el movimiento de los polos si se varía el valor de la ganancia aplicada, así como si se produce una atracción entre los ceros y los polos del sistema. De esta manera se pueden encontrar ganancias críticas, ganancias que vuelvan estable o inestable al sistema, ganancias que cambien la naturaleza de los polos, entre otras. Diagramas de Bode En el análisis de Bode se pueden identificar algunos aspectos de la respuesta a la frecuencia de nuestro sistema. Las trazas de Bode no representan un criterio de estabilidad, únicamente caracterizan al sistema. Se puede obtener información acerca de los valores de 8 frecuencia en los cuales se amplifica o se atenúa la señal del sistema, se extrae información acerca del desfasamiento que se produce a diferentes frecuencias y, por último, se obtiene una caracterización específica para frecuencias de 50 hz (314 rad/s) y de 60 hz (377 rad/s). Criterio de estabilidad de Nyquist El análisis de Nyquist nos permite determinar si un sistema es estable en el dominio de la frecuencia o no lo es, por lo tanto, este sí es un criterio de estabilidad. Para determinar la estabilidad del sistema se tiene que si Z=0, el sistema es estable en el dominio de la frecuencia y si Z ≠ 0, el sistema es inestable en el dominio de la frecuencia. Para el cálculo de Z se sigue la siguiente ecuación: 𝑍 =𝑁+𝑃 Donde: P = Polos en el semiplano derecho de la función en lazo abierto. N = Número de rodeos al punto de interés (-1 + j0) en la traza de Nyquist Z = Ceros de lazo cerrado que vuelven inestable al sistema El valor de N depende del sentido en que se produzcan los rodeos al punto de interés en la gráfica de Nyquist, en caso de que el rodeo se de en sentido horario, se dará un valor de 1 por cada uno que se produzca; mientras que, si se da en sentido antihorario, se dará un valor de -1 por cada rodeo que se tenga. Controlador Proporcional-Integral-Derivativo Acción de control proporcional. Adiciona una ganancia proporcional al sistema. Acción de control integral. Acción de control que busca eliminar el error en estado estacionario. Acción de control derivativa. El control derivativo prevé el error, inicia una acción correctiva oportuna y tiende a aumentar la estabilidad del sistema. Controlador PID. Es un controlador que realiza las tres acciones de control, proporcional, integral y derivativa. Reglas de sintonización para PID de Ziegler-Nichols. Son reglas para sintonizar los controladores PID basándose en las respuestas escalón experimentales o en el valor de Kp que produce estabilidad marginal cuando sólo se usa la acción de control proporcional. Primer método de las Reglas de sintonización para PID de Ziegler-Nichols. La respuesta de la planta a una entrada escalón unitario se obtiene de manera experimental. Este método se puede aplicar si la respuesta muestra una curva con forma de S. La curva con forma de S se caracteriza por dos parámetros: el tiempo de retardo L y la constante de tiempo T. El tiempo de retardo y la constante de tiempo se determinan dibujando una recta tangente 9 en el punto de inflexión de la curva con forma de S y determinando las intersecciones de esta tangente con el eje del tiempo y con la línea de estabilidad del sistema. Metodología Obtención de la función de transferencia Dentro de nuestro sistema proponemos valores para calcular nuestra función de transferencia. Se supone que se usará agua como líquido destinado a calentar. M = 100 kg (masa del líquido) c = 4.18 KJ/kgK (calor específico del agua) G = 1.5 kg/s (flujo másico del agua que entra al sistema) Los valores de la resistencia y de la capacitancia térmica se calculan de la siguiente forma: Capacitancia térmica 𝐶 = 𝑀𝑐 = (100𝑘𝑔) (4.18 𝐶 = 418 𝑘𝐽 ) 𝑘𝑔𝐾 𝑘𝐽 𝐾 Resistencia térmica 𝑅= 1 = 𝐺𝑐 1 𝑘𝑔 𝑘𝐽 (1.5 𝑠 ) (4.18 ) 𝑘𝑔𝐾 𝑅 = 0.1595 𝐾 𝑘𝑊 Según el modelado matemático previo, el sistema está compuesto de la siguiente manera: 10 Por lo que para el cálculo de los valores de nuestra función de transferencia sólo hay que sustituir lo obtenido para la resistencia y la capacitancia térmicas. 1 𝑅𝐶𝑠 = 1 (0.1595)(418) = 1 66.671𝑠 Ahora sólo resta sustituir lo calculado en el diagrama de bloques de la planta: Equivalente de lazo abierto Como nuestro sistema tiene dos entradas y dos salidas, es necesario hacer un análisis por superposición, analizando cada parte del sistema por separado. En este caso, un sistema considerará un cambio en la transferencia de calor que se está produciendo y el otro considerará un cambio en la temperatura inicial a la que está entrando el líquido. Para hacer el equivalente de lazo abierto, primero se saca el equivalente en lazo abierto de la parte en lazo cerrado del diagrama de bloques, en este caso es el mismo procedimiento para ambos sistemas. Uno de los dos casos particulares no necesita que se le realicen más operaciones, mientras que el otro necesita una multiplicación adicional del bloque que está fuera del punto de suma. Los diagramas equivalentes quedan de la siguiente forma: Primer caso Lazo cerrado Lazo abierto 11 Segundo caso Lazo cerrado Lazo abierto Respuesta del sistema Para probar cómo responde el sistema ante diferentes entradas se hicieron los siguientes circuitos en simulink. A continuación, se mostrarán nuestros 2 casos una vez establecidos en simulink, cada caso se presenta en su forma de lazo abierto y cerrado, así como también 2 fuentes una de escalón unitario y la segunda de una fuente sinusoidal. Primer caso Lazo cerrado Escalón unitario 12 Fuente de alimentación sinusoidal 13 Lazo abierto Escalón unitario Fuente de alimentación sinusoidal 14 Segundo caso Lazo cerrado Escalón unitario 15 Fuente de alimentación sinusoidal 16 Lazo abierto Escalón unitario Fuente de alimentación sinusoidal 17 Análisis en plano complejo para estabilidad Se utiliza el análisis en plano complejo para determinar la estabilidad del sistema. Para ello se usarán las funciones de Matlab que nos permitirán ver de forma gráfica la cantidad de polos que tiene, y su posición. Primer caso Ya obtenida nuestra función de transferencia en lazo abierto se usan los comandos “num” y “den” en Matlab de la manera mostrada en la imagen así estableciendo nuestros respectivos numerador y denominador. Una vez hecho esta se implementa el comando rlocus(num,den) para graficar el lugar geométrico de las raíces y observar el comportamiento que tendrá si aumentamos la ganancia de la función de transferencia. 18 El posicionamiento del polo nos indica que el sistema es estable, ya este se encuentra en el semiplano izquierdo. Segundo caso Muy parecido al primer caso la diferencia yace en que su numerador es 1 y una vez más definiendo nuestro num y den se aplica el comando rlocus nuevamente para observar que no existe un cambio en el lugar geométrico de las raíces ya que no se cambió el numerador por ende los polos se mantienen iguales. 19 La gráfica es muy similar a la primera, por no decir que es igual. El sistema es estable debido a que su polo se encuentra en el semi plano izquierdo. Lugar geométrico de las raíces Primer caso Determinaremos la estabilidad del sistema mediante el LGR ingresando los datos de la función en lazo abierto en MATLAB, para después determinar su estabilidad. 𝐺(𝑠) = 0.1595 66.671𝑠 + 1 Como podemos observar mediante el LGR el sistema es estable ya que su único polo se encuentra en el semiplano izquierdo. Tiene un valor de -0.015 esto nos dice que es un polo 20 dominante por lo que la respuesta del sistema va a ser muy lenta. Se necesitaría aplicar una ganancia muy grande para sacar el polo de la zona de dominancia, para así mejorar la respuesta de este. Segundo caso Determinaremos la estabilidad del sistema mediante el LGR ingresando los datos de la función en lazo abierto en MATLAB, para después determinar su estabilidad. 𝐺(𝑠) = 1 66.671𝑠 + 1 Como podemos observar mediante el LGR el sistema es estable ya que su único polo se encuentra en el semiplano izquierdo. Tiene un valor de -0.015 esto nos dice que es un polo 21 dominante por lo que la respuesta del sistema va a ser muy lenta. Se necesitaría aplicar una ganancia muy grande para sacar el polo de la zona de dominancia, para así mejorar la respuesta de este. Componentes de estabilidad relativa Primer caso Para obtener los componentes de estabilidad relativa de la función: 𝐺(𝑠) = 0.1595 66.671𝑠 + 1 Se usará la forma estándar de: 𝜔𝑛2 𝑠 2 + 2𝜁𝜔𝑛 𝑠 + 𝜔𝑛2 Así tenemos que: 𝑠2 = 0 2𝜁𝜔𝑛 𝑠 = 66.671𝑠 𝜁 = 33.3355 𝜔𝑛2 = 1 4 4 𝑡𝑠 (2%) = 𝜁𝜔 = 33.3355 = 0.12 𝑠𝑒𝑔 𝑛 3 3 𝑡𝑠 (5%) = 𝜁𝜔 = 33.3355 = 0.09 𝑠𝑒𝑔 𝑛 22 𝜔𝑑 = √1 − 𝜁 2 = √1 − (33.3355)2 = La respuesta no está dentro de los números reales. Obtenemos que el valor de ζ > 1 por lo que el sistema es sobreamortiguado lo que causara que no oscile, el tiempo de estabilización al 2 % es de 0.12 segundos, al 5% es de 0.09 segundos. Segundo caso Para obtener los componentes de estabilidad relativa de la función: 𝐺(𝑠) = 1 66.671𝑠 + 1 Se usará la forma estándar de: 𝜔𝑛2 𝑠 2 + 2𝜁𝜔𝑛 𝑠 + 𝜔𝑛2 Así tenemos que: 𝑠2 = 0 2𝜁𝜔𝑛 𝑠 = 66.671𝑠 𝜁 = 33.3355 𝜔𝑛2 = 1 4 4 𝑡𝑠 (2%) = 𝜁𝜔 = 33.3355 = 0.12 𝑠𝑒𝑔 𝑛 3 3 𝑡𝑠 (5%) = 𝜁𝜔 = 33.3355 = 0.09 𝑠𝑒𝑔 𝑛 𝜔𝑑 = √1 − 𝜁 2 = √1 − (33.3355)2 = La respuesta no está dentro de los números reales. Obtenemos que el valor de ζ > 1 por lo que el sistema es sobreamortiguado lo que causara que no oscile, el tiempo de estabilización al 2 % es de 0.12 segundos, al 5% es de 0.09 segundos. Routh-Horwitz Este criterio sirve para determinar le estabilidad de un sistema, el cual está formado por el “criterio de Routh” y el “criterio de Horwitz”. Se tiene que aplicar ambos criterios para determinar si el sistema es estable. Primer caso Criterio de Routh. 23 𝐺(𝑠) = 0.1595 66.671𝑠 + 1 Aplicando el criterio de Routh podemos observar que en el denominador de la función no tiene cambios de signo ni coeficientes cero, por lo tanto, cumple con el criterio de Routh. Criterio de Horwitz. 𝑎1 𝑎2 𝑠1 66.671 0 𝑠0 1 0 Aplicando el criterio de Horwitz pasamos a resolver la matriz anotando los valores correspondientes en cada columna, como observamos no hay cambio de signo en los valores previamente anotados en la matriz determinando así que la función es estable. Primer caso Criterio de Routh. 𝐺(𝑠) = 1 66.671𝑠 + 1 Aplicando el criterio de Routh podemos observar que en el denominador de la función no tiene cambios de signo ni coeficientes cero, por lo tanto, cumple con el criterio de Routh. Criterio de Horwitz. 𝑎1 𝑎2 𝑠1 66.671 0 𝑠0 1 0 Aplicando el criterio de Horwitz pasamos a resolver la matriz anotando los valores correspondientes en cada columna, como observamos no hay cambio de signo en los valores previamente anotados en la matriz determinando así que la función es estable. 24 Diagramas de Bode Para la realización de los diagramas de Bode se utiliza el comando Bode (num, den) en Matlab, donde previamente se ingresan los valores específicos de la función de transferencia en lazo abierto del sistema, para el numerador y para el denominador. Primer caso Se obtiene el siguiente diagrama 25 Para la primera función de transferencia se tiene a 60 hz una magnitud de -104 dB y un ángulo de fase de 90° A 50 hz tenemos una magnitud de -102 dB y un ángulo de fase de -90° Segundo caso 26 Se obtiene el siguiente diagrama Para la segunda función de transferencia se tiene a 60 hz una magnitud de -88 dB y un ángulo de fase de 90° A 50 hz tenemos una magnitud de -86.4 dB y un ángulo de fase de -90° 27 Criterio de estabilidad de Nyquist Primer caso Tenemos que la primera función es estable ya que no tiene encierros y se mantiene en el semiplano izquierdo. P = 0, no se tienen polos en el semiplano derecho. N = 0, como se puede apreciar en el diagrama mostrado, no se tienen rodeos al punto de interés. Z=0+0=0 Por lo tanto, el sistema es estable en el dominio de la frecuencia. Segundo caso Para la segunda función tenemos que es estable ya que no cuenta con ningún encierro. P = 0, no se tienen polos en el semiplano derecho. 28 N = 0, como se aprecia en el diagrama anterior, no hay rodeos al punto de interés. Z=0+0=0 Por lo tanto, el sistema es estable en el dominio de la frecuencia. Controladores Primer caso Controlador P Se calculó un controlador Proporcional para intentar obtener una mejor respuesta del sistema. Empleado el primer método de la regla de sintonía de Ziegler-Nichols, el cual utiliza la respuesta de la planta a una entrada escalón unitario. La función de transferencia a evaluar es 𝐺(𝑠) = 0.1595 66.671𝑠 + 1 Utilizando MATLAB obtenemos la respuesta: 29 Se puede observar que no hay un punto de inflexión por lo que trazamos una línea tangencial a un punto arbitrario. Los resultados de las contantes fueron, L=25 y T=80, kp=3.2, Ti=∞ y Td=0. La función de transferencia del P es la siguiente: 3.2 La respuesta del sistema con el controlador P que calculamos es la siguiente: 0.5104 66.671𝑠 + 1 30 Hubo una mejora menor en el tiempo con respecto al sistema anterior, pero en términos generales, no mejora el sistema, ya que sigue teniendo una respuesta demasiado lenta y tampoco arregló el error en estado estable, que sigue siendo del 66%. Por lo que un controlador P calculado no es correcto. Controlador PI Se calculó un controlador Proporcional-integral para intentar obtener una mejor respuesta del sistema. Empleado el primer método de la regla de sintonía de Ziegler-Nichols, el cual utiliza la respuesta de la planta a una entrada escalón unitario. Se puede observar que no hay un punto de inflexión por lo que trazamos una línea tangencial a un punto arbitrario. Los resultados de las contantes fueron, L=25 y T=80, kp=2.88, Ti=83.33 y Td=0. La función de transferencia del P es la siguiente: 2.88𝑠 + 0.0345 𝑠 La respuesta del sistema con el controlador P que calculamos es la siguiente: 0.4593𝑠 + 0.0055 66.671𝑠 2 + 𝑠 31 Hubo una mejora en el error en estado estable con respecto al sistema anterior, pero en términos generales, no mejora el sistema, ya que tiene una respuesta aún más lenta y el error en estado estable es del 3%. Por lo que un controlador PI calculado no es correcto. Controlador PID Se calculó un controlador Proporcional-integral-derivativo (PID), para mejorar la respuesta del sistema. Empleamos el primer método de la regla de sintonía de Ziegler-Nichols, el cual utiliza la respuesta de la planta a una entrada escalón unitario. Se puede observar que no hay un punto de inflexión por lo que trazamos una línea tangencial a un punto arbitrario. Los resultados de las contantes fueron, L=25 y T=80, kp=3.84, Ti=50 y Td=12.5. La función de transferencia del P es la siguiente: 48𝑠 2 + 3.84𝑠 + 0.0768 𝑠 32 La respuesta del sistema con el controlador P que calculamos es la siguiente: 7.656𝑠 2 + 0.61248𝑠 + 0.0122496 66.671𝑠 2 + 𝑠 Hubo una mejora menor en el tiempo de estabilización y en el error en estado estable con respecto al sistema anterior, en términos generales, no mejora el sistema, ya que tiene una respuesta aún más lenta, sin embargo, el error en estado estable es del 0%. Por lo que un controlador PID calculado no es el adecuado. 33 Controlador PID de MATLAB Utilizando el bloque PID Controller de Simulink para sintonizar PID, nos da los siguientes parámetros: Y la respuesta del sistema es El controlador autosintonizado mejoró el error en estado estable, ahora es de 0%. El tiempo de estabilidad disminuyó a 6.5 segundos mientras que el máximo pico es de 4%. Segundo caso Controlador PID Se calculó un controlador Proporcional-integral-derivativo (PID), para mejorar la respuesta del sistema. Empleamos el primer método de la regla de sintonía de Ziegler-Nichols, el cual utiliza la respuesta de la planta a una entrada escalón unitario. Se puede observar que no hay un punto de inflexión por lo que trazamos una línea tangencial a un punto arbitrario. Los resultados de las contantes fueron, L=25 y T=80, kp=3.84, Ti=50 y Td=12.5. La función de transferencia del P es la siguiente: 34 48𝑠 2 + 3.84𝑠 + 0.0768 𝑠 La respuesta del sistema con el controlador P que calculamos es la siguiente: 48𝑠 2 + 3.84𝑠 + 0.0768 66.671𝑠 2 + 𝑠 No hay mejora en ningún parámetro (tiempo de estabilidad, máximo pico), al contrario, se presenta un máximo pico de 2%. Por lo que un controlador PID calculado no es el adecuado. 35 Controlador PID de MATLAB Utilizando el bloque PID Controller de Simulink para sintonizar PID, nos da los siguientes parámetros: Y la respuesta del sistema es El controlador autosintonizado mejoró el error en estado estable, ahora es de 0%. El tiempo de estabilidad disminuyó a 4.5 segundos mientras que el máximo pico es de 2%. 36 Resultados Ambos sistemas respondían de una forma muy similar, si no es que igual, en los diferentes análisis aplicados a ambos. Se puede concluir que la respuesta y el análisis de ambos se hace más sencillo, puedo que es de un primer orden, los sistemas demostraron ser estables tanto en el dominio del tiempo, como en el de la frecuencia. Los sistemas responden de forma tan lenta debido a la presencia de sus polos muy próximos al origen, lo que los mantiene en zona de dominancia, y requerirían ganancias enormes para salir de allí. Los sistemas nunca presentaron máximos picos, ya que son sobreamortiguados. Mediante los diagramas de bode, se localizó el comportamiento del sistema en frecuencias de interés. Después de probar distintos controladores en uno de los sistemas, se concluyó que el mejor o más eficiente es el proporcional-integral-derivativo, puesto que hace que la respuesta de sistema sea hasta 100 veces más rápida, y la mejor propuesta de PID es la que propone MATLAB con su controlador autosintonizable. Conclusiones El sistema térmico mezclado tiene dos casos que componen al sistema en general. El primero tiene en cuenta si hay un cambio en la transferencia de calor que se está produciendo en el calentador eléctrico en el contenedor. En el segundo caso se considera un cambio en la temperatura de entrada del líquido antes de pasar por el calentador. En un principio, el sistema fue modelado matemáticamente, encontrando las funciones de transferencia correspondientes a cada caso. De esta forma, se calcularon los equivalentes en lazo abierto. Se observó que ambos casos del sistema eran muy parecidos, la única diferencia es que uno presentaba un numerador de 0.1595 producto de un bloque de ganancia externo al punto de suma y el otro presentaba un numerador de 1. Ambos casos del sistema fueron analizados por los diferentes métodos que se vieron en clase, demostrando que ambos se comportaban de manera estable, pero que se tenía un gran problema con el tiempo de estabilización. El sistema tardaba mucho tiempo para estabilizarse. Esto era causado porque el único polo que se tiene en los dos casos está considerablemente cercano al eje imaginario, fuertemente establecido en la zona de dominancia. Para mejorar los problemas detectados se intentaron dos cosas: diseñar un controlador de tipo proporcional integral derivativo. Se buscaba que, al ser diseñados y aplicados en cada caso, se lograra una mejora en los parámetros de respuesta del sistema. El controlador PID diseñado no logró presentar mejorías en la respuesta del sistema. Desde un principio se encontraron dificultades para el diseño del controlador, ya que, al no tener 37 una ganancia crítica nuestro sistema, no se podía usar el método de la ganancia crítica. Con el otro método usado, el de la respuesta en s, se tuvo problemas con el trazo de la línea recta que determinara los componentes T y L para el diseño. Con la ayuda de Matlab sí se logró sintonizar un PID que mejoraba considerablemente la respuesta del sistema. En general, el sistema necesitaba un componente que mejorara el tiempo de estabilización del sistema. El compensador que logra de manera satisfactoria esta condición es el PID sintonizado por Matlab. 38