CAPITULO
2
ANÁLISIS DE LA RESPUESTA
TRANSITORIA
2.1
INTRODUCCIÓN
Una de las características más importante de los sistemas de control es su
respuesta transitoria. Como el propósito de los sistemas de control es
proporcionar una respuesta deseada, frecuentemente su respuesta transitoria
debe ajustarse hasta que cumpla con las características de la salida deseada.
En el análisis de sistemas de control, se debe examinar y comparar el error
final en el estado estacionario para lazo abierto y cerrado.
2.2
ERROR DE ESTADO ESTACIONARIO (ess)
Si un sistema de control en lazo abierto (figura 2.2) no proporciona la
respuesta deseada, entonces G(s) debe reemplazarse por una que cumpla las
características deseadas.
Un sistema de control realimentado como el de la figura 2.1, permite al
ingeniero ajustar la respuesta transitoria, además la realimentación diminuye
significativamente los efectos de las perturbaciones, sin embargo, con la
realimentación no se obtiene una respuesta exacta, es por esto, que en este
capitulo trataremos el tema del error de estado estacionario o final tanto para
sistemas de lazo abierto como cerrado.
16
Universidad del Cauca
DEIC-FIET
R(s) +
_
C(s)
Planta
G(s)
H(s)
Figura 2.1: Sistema de Control en Lazo Cerrado.
R(s)
Planta
G(s)
C(s)
Figura 2.2: Sistema en Lazo Abierto.
El error de un sistema de control en lazo abierto como el que se muestra en la
figura 2.2, está definido por:
Eo(s) = R(s) - C(s)
Eo(s) = (1-G(s))R(s)
(2.1)
El error de sistema de control en lazo cerrado de la figura 2.1 es:
EC(s) = R(s) – H(s)C(s)
EC(s) = R(s) – H(s)Ec(s)G(s)
EC(s)(1+ H(s)G(s)) = R(s)
EC ( s) =
1
R( s)
1 + H ( s )G ( s )
(2.2)
Para calcular el error en el estado estacionario, se utiliza el teorema del valor
final, el cual se define así:
lim e(t ) = lim sE ( s )
t →∞
(2.3)
S →0
Por lo tanto, usando una entrada escalón unitario como estrada, para un
sistema en lazo abierto se tiene:
e0 (∞) = lim s(1 − G ( s))(1 / s) = lim(1 − G ( s)) = 1 − G (0)
S →0
S →0
(2.4)
Para un sistema con realimentación unitaria se tiene
Análisis de Respuesta Transitoria
17
Universidad del Cauca
DEIC-FIET
1
1
1
=
eC (∞) = lim s
S →0
1 + G ( s ) s 1 + G (0)
(2.5)
Recuerde que la transformada de Laplace del escalón unitario es 1/s.
El valor de G(s) para s=0 se denomina ganancia de DC y normalmente es
mayor que la unidad. Por lo tanto el sistema en lazo abierto generalmente
tendrá un error de estado estacionario de magnitud considerable, lo contrario
ocurre con el sistema el lazo cerrado, o sea
que el error de estado
estacionario de un sistema en lazo cerrado será muy pequeño.
De la ecuación 2.4 se observa que el sistema en lazo abierto puede tener un
error de estado estacionario de cero, únicamente ajustando G(0) para que sea
igual a la unidad, lo cual no ocurre con el sistema en lazo cerrado, la
característica del por que se utiliza realimentación para los sistemas de control,
pese a que en lazo abierto logro un error de cero, radica en aun logrando
calibrar G(0)=1 para que en lazo abierto tenga un error de estado estacionario
de cero, el sistema es afectado por el ambiente en el cual trabajo lo que
ocasiona que los parámetros de la planta G(s) cambien lo que hace que la
ganancia dc del sistema ya no sea la unidad y por tal motivo el error sea
diferente de cero, en cambio para un sistema en lazo cerrado o con
realimentación logra minimizar los efectos de la variación de los parámetros de
la planta G(s) lo que hace que las características del todo el sistema se
mantengan constantes, logrando poca variación en el error de estado
estacionario, en el siguiente ejercicio se demostrará esta característica.
Ejemplo 2.1:
Dada G(s)=k/(τs+1). Determinar el error de estado estacionario en lazo abierto y
cerrado de G(s) a una entrada escalón unitario.
Para el sistema en lazo abierto se tiene:
1
eo (∞) = lim s (1 − G ( s )) = lim(1 − G ( s )) = 1 − G (0) = 1 − k
s →0
s s →0
Para el sistema en lazo cerrado: (Realimentación Unitaria)
1
1
1
1
=
eC (∞) = lim s
=
S →0
1 + G ( s ) s 1 + G (0) 1 + k
Para el sistema en lazo abierto se calibra k=1 de forma que se obtenga un error de
estado estacionario de cero, para el sistema en lazo cerrado supongamos un valor de
K=100, entonces el error es de ec(∞)=1/101;
Análisis de Respuesta Transitoria
18
Universidad del Cauca
DEIC-FIET
Si las condiciones ambientales del sistema y hace que la calibración cambie en un
10%, el error de estado estacionario para el sistema en lazo abierto es ∆eo(∞)=0.1 y
el cambio desde el ajuste calibrado es:
∆e o (∞) 0.1
=
= 10%
r (t )
1
Para el sistema en lazo cerrado se tiene que ec(∞)=1/91, entonces el cambio en el
error de estado estacionario es:
1
1
∆ec (∞) =
− = 0.0011
101 91
y el cambio relativo es:
∆ec (∞) 0.0011
=
= 0.11%
r (t )
1
Se puede observar que la variación de los parámetros de la planta afecta en menor
proporción al sistema en lazo cerrado.
2.3
ERROR DE ESTADO ESTACIONARIO PARA SISTEMAS DE PRIMER
Y SEGUNDO ORDEN
El funcionamiento en el dominio del tiempo es muy importante para el análisis
del comportamiento de los sistemas de control, para facilitar este análisis se
recurre a alimentar los sistemas con señales de prueba, las cuales nos dan una
visión general del comportamiento de la planta, estas señales de prueba son:
el escalón, la rampa y la parábola normalizadas. En la tabla 2.1 se encuentra la
definición de las señales y su respectiva transformada de Laplace.
Señal de Prueba
r(t)
R(s)
Escalón
r(t) =A, t>0
=0, t<0
R(s)=A/s
Rampa
r(t) =At, t>0
=0, t<0
R(s)=A/s2
Parabólica
r(t) =At2, t>0
=0, t<0
R(s)=A/s3
Tabla 2.1
Análisis de Respuesta Transitoria
19
Universidad del Cauca
DEIC-FIET
r(t)
r(t)
r(t)
A
t
t
t
Figura 2.3: Señales de Prueba.
Teniendo en cuenta la definición de error de estado estacionario, en la tabla
2.2 se presentan las constantes del error para entradas como el escalón,
rampa y parábola para sistemas en lazo cerrado, que es el interés de este
curso.
La constante de error para un sistema con entrada escalón se define así:
1
1
1
1
=
eC (∞) = lim s
=
S →0
H ( s )G ( s ) 1 + k p
1 + H ( s )G ( s ) s 1 + lim
s →0
Para la entrada rampa, la constante de error es
1 1
2
eC (∞) = lim s
S →0
1 + G ( s ) s
1
1
1
=
=
=
(s + sH ( s)G ( s) ) lim
H ( s )G ( s ) k v
lim
s →0
s →0
Y para la entrada parábola
1 1
1
1
1
3 =
eC (∞) = lim s
=
=
2
2
2
S →0
s + s H ( s )G ( s ) lim s H ( s )G ( s ) k a
1 + G ( s ) s lim
s →0
s →0
(
)
Señal de Entrada
Constante de Error
ess
Escalón
lim H ( s)G ( s) = k p
ess=1/(1+kp)
Rampa
lim sH ( s)G ( s ) = k v
ess=1/kv
Parábola
lim s 2 H ( s )G ( s ) = k a
ess=1/ka
S →0
S →0
S →0
Tabla 2.2
Donde H(s) es la función de transferencia del bloque de realimentación y G(s)
la función de transferencia del proceso.
2.3.1
Error de Estado Estacionario para Sistemas de Primer Orden
Un sistema de primer orden es aquel cuya máxima potencia del denominador
es uno, un ejemplo de este tipo de sistemas es:
Análisis de Respuesta Transitoria
20
Universidad del Cauca
DEIC-FIET
FT=H(s)=C(s)/R(s)=1/(1+τs)
La figura 2.4 muestra el diagrama en bloques del sistema de primer orden.
1
τs + 1
R(s)
C(s)
1
τs
R(s) +
_
(a)
C(s)
(b)
Figura 2.4: Sistema de Primer Orden.
a) En lazo abierto, b) En lazo cerrado.
Ejercicio 2.2
Determinar el error de estado estacionario del sistema de primer orden identificado
por la siguiente función de transferencia.
FT=F(s)=1/(s+2)
Señal de entrada: Escalón Unitario
En lazo abierto:
1
1
1
e ss = lim s (1 − G ( s )) = lim(1 −
)=
S →0
s S →0
s+2
2
En lazo cerrado (Realimentación unitaria)
1
1
1
= 1 = 2
= lim
e ss = lim s
S →0
1 + HG ( s ) s S →0 1 + 1 1 + 1 3
2
s + 2
Señal de entrada: Rampa
En lazo abierto
e ss = lim s (1 − G ( s ))
S →0
1
1 1
= lim1 −
= ∞
2
→
S
0
s
s + 2 s
en lazo cerrado (Realimentación unitaria)
1
k v = lim s (HG ( s ) ) = lim s
=0
S →0
S →0
s + 2
Análisis de Respuesta Transitoria
21
Universidad del Cauca
DEIC-FIET
ess = 1/kv = ∞
Para una señal de entrada parabólica el error de estado estacionario es infinito tanto
para el sistema en lazo abierto como cerrado, la comprobación queda como ejercicio
para el lector.
A continuación se presentan los programas en Matlab para determinar la
respuesta para el sistema de primer orden del ejercicio anterior.
Programa para una entrada escalón:
num=[1];
% Definición del Numerador
den=[1 2];
% Definición del Denominador
g=tf(num,den);
% Función de Transferencia
% En Lazo abierto
step(g,'.')
% Respuesta al escalón
% En lazo cerrado
gc=feedback(g,1);
% Con realimentación unitaria
hold on;
step(gc)
legend(‘Lazo Cerrado’,’Lazo Abierto’)
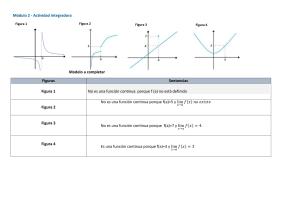
En la figura 2.5 se muestra la respuesta al escalón. La línea punteada
corresponde al sistema en lazo abierto y la línea continua al sistema en lazo
cerrado, comprobando así el error de estado estacionario que resulto del
proceso matemático.
Figura 2.5: Respuesta al Escalón de 1/(s+2).
Análisis de Respuesta Transitoria
22
Universidad del Cauca
DEIC-FIET
2.3.2
Error de Estado Estacionario para Sistemas de Segundo Orden
Ejercicio 2.3:
Encontrar el error de estado estacionario para las entradas escalón, rampa y
parábola del siguiente sistema de segundo orden.
FT=F(s)=1/s(s+2)
Para el análisis de error de estado estacionario solo se tendrá en cuenta los sistemas
realimentados que son el interés de este curso.
La realimentación es unitaria.
Señal de entrada: Escalón Unitario
1
=∞
k p = lim H ( s )G ( s ) = lim
S →0
S →0 s ( s + 2)
⇒
e ss = 1 /(1 + k p ) = 0
⇒
e ss = 1 / k v = 2
⇒
e ss = 1 / k a = ∞
Señal de entrada: Rampa
1 1
k v = lim sH ( s )G ( s ) = lim
=
S →0
S →0 s + 2
2
Señal de entrada: Parábola
s
k a = lim s 2 H ( s )G ( s ) = lim
=0
S →0
S → 0 s + 2
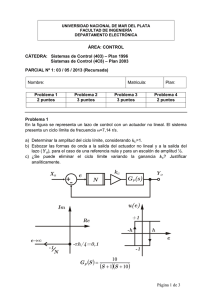
El siguiente programa en Matlab muestra la respuesta a la rampa.
num=[1];
den=[1 2 0];
f=tf(num,den);
t=0;0.1;10;
% Definición de tiempo de graficación
t=u;
% Definición de Rampa
lsim(feedback(f,1),u,t,'-'); % Gráfica la salida a un entrada arbitraria
hold on
plot(t,u,'.')
% Gráfica de la Rampa
grid on
Análisis de Respuesta Transitoria
23
Universidad del Cauca
DEIC-FIET
Figura 2.7: Respuesta a la Rampa.
En la siguiente tabla se presenta el error de estado estacionario para sistemas
de diferente orden.
Señal de Entrada
1er Orden
2do Orden
3er Orden
Escalón
Rampa
Parábola
1/(1+kp)
∞
∞
0
1/kv
∞
0
0
1/ka
Tabla 2.3
El error de estado estacionario no depende de la función de transferencia del
sistema realimentado, sino, de las funciones de transferencia del proceso y del
bloque de realimentación. A continuación se presenta un ejemplo en el que se
muestra esta aseveración.
Ejemplo 2.4
Determinar la función de transferencia y el error de estado estacionario de
los sistemas de la figura 2.8
R(s) +
_
1/(s+1)
C(s)
R(s) +
_
1/s
C(s)
2
(a)
(b)
Figura 2.8: Sistemas Realimentados.
Análisis de Respuesta Transitoria
24
Universidad del Cauca
DEIC-FIET
Las funciones de transferencia de los sistemas a y b de la figura 2.8 son
iguales, ahora se determinará el eSS para cada sistema a una entrada
escalón.
Para el sistema a:
1
=1
k p = lim H ( s )G ( s ) = lim
S →0
S →0 ( s + 1)
⇒
e ss = 1 /(1 + k p ) = 1 / 2
⇒
ess = 1 /(1 + k p ) = 0
Para el sistema b:
2
k p = lim H ( s )G ( s ) = lim = ∞
S →0
S →0 s
2.4
ANALISIS DE RESPUESTA TRANSITORIA
El análisis de sistemas dinámicos a partir de la función de transferencia H(s),
facilita el estudio de la estabilidad relativa del proceso o planta.
La función F(s) es la ganancia de transferencia desde U(s) a Y(s) es
denominada Función de Transferencia del sistema. Si la entrada u(t) es la
función impulso unitario δ(t), entonces y(t) es la respuesta del sistema al
impulso, la transformada de Laplace de u(t) es 1, entonces la función de
transferencia será.
Y(s) = F(s)
Por lo tanto la función de transferencia F(s) es la transformada de Laplace de
la repuesta al impulso unitario de f(t)
En otras palabras, sí se desea caracterizar un sistema lineal invariante en el
tiempo, se aplica un impulso unitario, la respuesta resultante es la función de
transferencia del sistema.
La función de transferencia de un sistema de control realimentado de la figura
2.1 esta dada por:
F (s) =
G(s)
1 + G ( s) H ( s)
(2.6)
Al denominador de la ecuación 2.6 se le llama función característica del
sistema.
T(s) = 1+H(s)G(s)
(2.7)
Análisis de Respuesta Transitoria
25
Universidad del Cauca
DEIC-FIET
El análisis de estabilidad relativa de un sistema parte del estudio de las raíces
de la función característica (o polos del sistema), otro aspecto a tener en
cuenta, es el que la respuesta transitoria de un sistema esta formada por
términos exponenciales y senoidales.
La figura 2.9 presenta el comportamiento de la salida de un sistema de control
realimentado dependiendo de la ubicación de las raíces de T(s).
jw
x
x
x
x
x
x
x
x
x
x
x
x
x
σ
Figura 2.9: Comportamiento con Respecto a la Ubicación de las Raíces de
T(s)=1+G(s)H(s).
Un sistema es inestable si la parte real de las raíces de T(s) es positiva.
De la figura 2.9 se concluye que:
•
Si la parte real de las raíces de T(s) es positiva entonces la señal de salida
crece debido a eσt.
•
Si la parte real de las raíces de T(s) es cero entonces la señal de salida es
constante debido a e0= 1.
•
Si la parte real de las raíces de T(s) es negativa entonces la señal de salida
decrece debido a e-σt.
Para el análisis del transitorio de la señal de salida de un sistema de control se
tomará como referencia la ecuación genérica de un sistema de segundo orden
con realimentación.
Análisis de Respuesta Transitoria
26
Universidad del Cauca
DEIC-FIET
F (s) =
wn2
s 2 + 2εwn s + wn2
(2.8)
Donde wn es la frecuencia natural del sistema y ε es el coeficiente de
amortiguamiento. Los polos y la relación con los parámetros wn y ε de la
función 2.8 o de un sistema de segundo orden genérico se presentan en la
figura 2.10, se suponen raíces con parte real negativa.
jw
θ=Sen-1 ε
x
wd
wn
σ
σ
Figura 2.10: Ubicación de Polos Complejos Conjugados.
Donde σ = wnε y wd = wn 1 − ε 2 .
Las raíces de la ecuación 2.8 son:
(
4ε 2 wn2 − 4 wn2
2εwn
P1, 2 = −
±
= wn − ε ± ε 2 − 1
2
2
)
(2.9)
De la ecuación 2.9, se tiene que:
•
•
•
•
Sí ε = 0 entonces P1,2 = ± jwn.
Sí 0 <ε <1 entonces P1,2 = wn (- ε ± j(1-ε2)1/2).
Sí ε =1 entonces P1,2 = -ε wn.
Sí ε >1 entonces P1,2 = wn (- ε ± (ε2-1)1/2).
De la figura 2.10 se puede apreciar lo siguiente: Si θ = 00, la respuesta del
sistema de control realimentado será oscilatoria con amplitud constantes,
debido a que las raíces de la función característica son imaginarias puras.
Como θ = Sen-1 ε entonces ε = 0, lo que indica que sí el coeficiente de
amortiguamiento es cero el sistema de segundo orden realimentado
unitariamente entonces respuesta del sistema será una señal oscilatoria de
amplitud constante alrededor del set-point.
Análisis de Respuesta Transitoria
Universidad del Cauca
DEIC-FIET
27
Por otra parte si θ = 900, el coeficiente de amortiguamiento es 1 y las raíces de
la función característica son reales negativas puras, por tanto la respuesta del
sistema decrece debido a la función exponencial e-σt y no presentará
oscilaciones.
Por lo tanto se puede deducir que entre mas cerca del eje imaginario se
encuentren las raíces de la función característica, el máximo sobre impulso
será mayor, al igual que el tiempo de establecimiento.
En el siguiente programa en Matlab se comprueba mediante simulación el
análisis realizado con respecto a la variación de ε.
%--------------------------------------------------%
% Análisis de Sistemas de Segundo Orden %
%--------------------------------------------------%
wn=1;
for e=0:0.4:1.2;
num=[wn*wn];
den=[1 2*e*wn wn*wn];
Planta=tf(num,den);
Planta_R=feedback(Planta,1);
hold on
step(Planta_R,20);
legend('e=0','e=0.4','e=0.8','e=1.2')
end
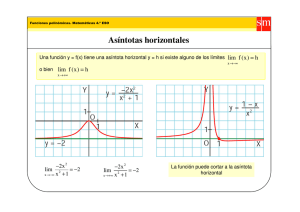
De la figura 2.11 se puede comprobar que entre más cerca del eje imaginario
se encuentren las raíces de la función característica, el sistema presentará
oscilaciones de mayor magnitud.
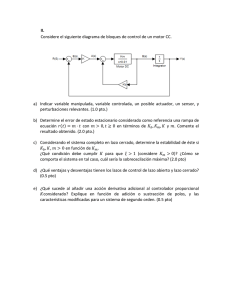
La figura 2.12 se muestra la respuesta al escalón unitario de un sistema de
segundo orden con wn = 1 y ε = 0.5, en esta gráfica se presentan las
diferentes características de la respuesta transitoria, como son: el tiempo de
elevación, tiempo de establecimiento y el máximo sobre impulso, recuerde que
como el sistema es de segundo orden y la señal de entrada es el escalón
unitario entonces el error de estado estacionario es cero.
Análisis de Respuesta Transitoria
28
Universidad del Cauca
DEIC-FIET
Figura 2.11: Respuesta al Escalón de un Sistema de Segundo Orden.
2.4.1
Análisis del Tiempo de Elevación (tr).
El tr se define como el tiempo que tarda la señal de salida en ir del 10% al
90% del valor final.
Mp
ts
tr
Figura 2.11: Respuesta al Escalón de Un Sistema de Segundo Orden. (ε = 0.5)
Análisis de Respuesta Transitoria
29
Universidad del Cauca
DEIC-FIET
Para 0 < ε < 1 el tiempo que tarda la señal de salida en ir de 0 a 1 (0% al
100%) es en promedio de 2.5 seg = wnt, y el tiempo de elevación es en
promedio de 1.8 seg = wntr, por lo tanto se tiene:
tr ≈ 1.8 / wn
(2.10)
Recuerde que esta constante es determinada empíricamente.
Análisis del Máximo Sobreimpulso (Mp).
2.4.2
El máximo sobre impulso es la diferencia entre el máximo valor que toma la
señal de salida en la primera oscilación y el valor final que toma la señal de
salida.
Para determinar el Mp se debe derivar la señal de salida en el dominio del
tiempo e igualarla a cero, pata así hallar la frecuencia para la cual la señal de
salida alcanza su valor máximo y luego por sustitución se determina la
magnitud de la señal de salida a la frecuencia donde ocurre el máximo.
Para una entrad escalón la señal de salida es:
C ( s) =
s( s 2
+
wn2
2e wn s + wn2 )
(2.11)
Aplicado antitransformada de Laplace:
-1
(C(s)) = 1 − e −σt cos( wd t ) +
σ
sen( wd t ) = c(t )
wd
(2.12)
Donde wd= wn 1 + ε 2 y
σ =ε wn.
dc(t )
σ
= 0 = σe −σt (cos( wd t ) +
sen( wd t )) − e −σt (− wd sen( wd t ) + σ cos( wd t ))
dt
wd
dc(t )
σ2
−σt
= 0 = σe ( wd sen( wd t ) +
sen( wd t ))
dt
wd
Para que la anterior igualdad se cumpla se requiere que wdt=π. Ahora se
sustituye wdt=π en c(t).
−σ π
wd
c(t ) = 1 + M p = 1 − e
−σ π
σ
wd
cos(π ) +
sen(π ) = 1 − e
wd
Análisis de Respuesta Transitoria
30
Universidad del Cauca
DEIC-FIET
c(t ) = 1 + M p = 1 + e
Mp =e
2.4.3
επ
−
1+ ε 2
−εwnπ
1−ε 2
wn
= 1+ e
επ
−
1+ε 2
Para 0<ε<1.
(2.13)
Análisis del Tiempo de Establecimiento (ts)
El ts se define como el tiempo que tarda la señal de salida en estar alrededor
de 1% de su valor final.
Para calcularlo matemáticamente se debe recordar que el factor que genera el
amortiguamiento de la señal de salida es e-σt, entonces:
e −σt s = e −εwnt s = 0.01
εwnts=4.6 ⇒ ts = 4.6/(εwn)= 4.6/σ
(2.14)
Las relaciones de Mp, Tr y Ts solo son validas para sistemas de segundo orden
que no tengan ceros.
2.5
CRITERIO DE ESTABILIDAD DE ROUTH-HURWITZ
Una característica muy importante del transitorio de un sistema de control es
su estabilidad, un sistema es estable si su respuesta es limitada, en otras
palabra, se dice que un sistema es estable si a una entrada o perturbación la
salida es de magnitud limitada.
De acuerdo con la figura 2.9, un sistema es estable si los polos del sistema
tienen parte real positiva, esta condición es necesaria para determinar la
estabilidad de un sistema realimentado, pero no suficiente; es decir que un
sistema aun teniendo todas las raíces de su función característica con parte
real negativa puede ser inestable.
El criterio de Routh-Hurwitz es suficiente y necesario para determinar la
estabilidad de sistema lineales y se basa en el ordenamiento de
los
coeficientes del polinomio característico que se presenta en la ecuación 2.15.
T(s)=ansn+an-1sn-1+an-2sn-2+...+a1s+a0
(2.15)
El ordenamiento de los coeficientes se muestra a continuación:
Análisis de Respuesta Transitoria
31
Universidad del Cauca
DEIC-FIET
sn
s n- 1
s n- 2
an
an- 1
b1
a n- 2
an- 3
b2
s n −3
M
c1
M
c2
M
s1
s0
d1
e1
d2
e2
an- 4 L
a n- 5 L
b3 L
c3 L
M
L
d3 L
e3 L
Donde
b1= [(an-1)(an-2) - (an)(an-3)]/an-1
b2= [(an-1)(an-4) - (an)(an-5)]/an-1
c1= [(b1)(an-3) - (an-1)(b2)]/b1
Así sucesivamente, hasta completar el arreglo. Para aplicar el criterio de
Routh-Hurwitz es necesario que ninguno de los coeficientes del polinomio
característico sea cero, en otra palabra el polinomio característico del sistema
debe tener la forma que se muestra en la ecuación 2.15.
El criterio de Routh-Hurwitz establece que el número de cambios de signo de la
primera columna del arreglo es igual al número de raíces con parte real
positiva que tiene el sistema.
Para que un sistema sea estable no se debe presentar cambios de signo en la
primera columna del arreglo de Routh-Hurwitz.
Existen tres casos diferentes que se deben tratar en forma independiente,
estos son:
•
•
•
Ningún elemento de la primera columna es cero.
Ceros en la primera columna, con algunos elementos de la fila que
contiene un cero diferentes de cero.
Todos los elemento de una fila iguales a cero.
A continuación se presentará cada caso por medio de ejemplos ilustrativos.
Caso I: Ningún elemento de la primera columna es cero.
Ejemplo 2.5
Determinar la estabilidad de un sistema de control realimentado que tiene la
siguiente función característica:
Análisis de Respuesta Transitoria
32
Universidad del Cauca
DEIC-FIET
T(s) = s3+s2+2s+24
El arreglo de Routh-Hurwitz será:
s3
s2
s1
s0
1
1
b1
c1
2
24
0
0
b1= (2-24)/1 = -22 y c1=24b1/b1=24
Primera columna
Como aparecen dos cambios de signo en la primera columna, entonces existen dos
raíces con parte real positiva en el plano complejo, por lo cual se deduce que el
sistema es inestable.
Caso II: Ceros en la primera columna, con algunos elementos de la fila
que contiene un cero, diferentes de cero.
Para este caso el cero de la columna se reemplaza por ε que es un número
positivo que tiende a cero.
Ejemplo 2.6
Dada la siguiente función característica, determinar la estabilidad del sistema por
medio del criterio de Routh-Hurwitz:
T(s) = s5+2s4+2s3+4s2+11s+10
El arreglo de Routh-Hurwitz es:
s 5 1 2 11
s 4 2 4 10
s3 ε 6 0
s 2 c1 10 0
s 1 d1 0 0
s 0 10 0 0
c1=(4ε-12)/ε ≈ -12/ε y d1=(6c1-10ε)/c1 ≈ 6
Hay dos cambios de signo en la primera columna del arreglo de Routh-Hurwitz, por
lo tanto el sistema es inestable ya que presenta dos raíces con parte real positiva.
Análisis de Respuesta Transitoria
33
Universidad del Cauca
DEIC-FIET
Caso III: Todos los elemento de una fila iguales a cero.
Ejemplo 2.7
Por medio del criterio de estabilidad de Routh-Hurwitz, determine la estabilidad del
sistema que tiene el siguiente polinomio característico:
T(s) = s5+s4+4s3+24s2+3s+63
El arreglo de Routh-Hurwitz es:
s5
s4
s3
s2
s1
1
4
3
1
24 63
− 20 − 60 0
21
0
63
0
0
0
Como se puede observar la fila correspondiente a s1 esta constituida por ceros, lo
cual impide continuar con el procedimiento para completar el arreglo, para solventar
este inconveniente se toma el polinomio generado por la fila anterior a la fila de ceros
(en este caso s2) y se deriva con respecto a s par obtener una nueva fila de s1 y así
continuar.
d(21s2+63)/dt = 42s
El arreglo de Routh-Hurwitz será:
s5
s4
s3
s2
s1
s0
1
4
3
1
24 63
− 20 − 60 0
21
63
0
42
0
0 Nueva fila
63
0
0
Hay dos cambios de signo en la primera columna del arreglo de Routh-Hurwitz, por
lo tanto el sistema es inestable ya que presenta dos raíces con parte real positiva.
Ejemplo 2.8
Determinar los rangos de k y a para que el sistema representado por la figura 2.12
sea estable.
Análisis de Respuesta Transitoria
34
Universidad del Cauca
DEIC-FIET
+
k ( s + a)
s +1
_
1
s ( s + 2)( s + 3)
Figura 2.12: Sistema de Control Realimentado.
Primero se determina la función característica del sistema:
F(s)=G(s)/(1+H(s)G(s))
Entonces
k ( s + a)
k ( s + a)
s ( s + 1)( s + 2)( s + 3)
F (s) =
=
k (s + a)
s ( s + 1)( s + 2)( s + 3) + k ( s + a )
1+
s ( s + 1)( s + 2)( s + 3)
F (s) =
k (s + a)
s + 6 s + 11s 2 + (6 + k ) s + ak
4
3
la función característica es el polinomio del denominador de la función de
transferencia, aplicando el criterio de Routh-Hurwitz, tenemos:
s4
s3
s2
s1
s0
1
6
60 − k
6
(60 − k )(6 + k ) + 36ak
60 − k
ak
11
6+k
ak
0
ak
0
0
0
0
0
Para que el sistema sea estable (60-k) > 0 y (60-k)(6+k)+36ak > 0
Por lo tanto;
k < 60 y a ≤ ((60-k)(6+k))/36k
Para un caso particular sí k = 30 entonces a ≤ 1.
Análisis de Respuesta Transitoria