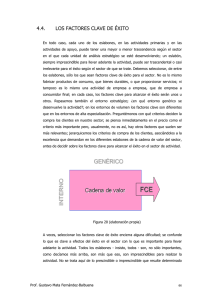
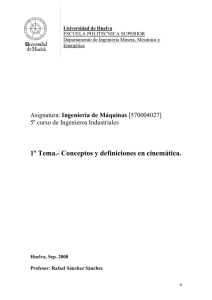
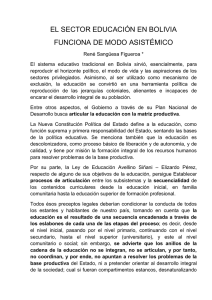
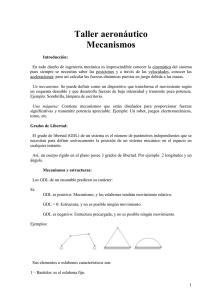
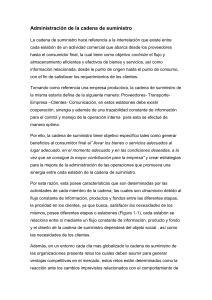
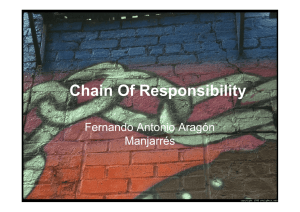
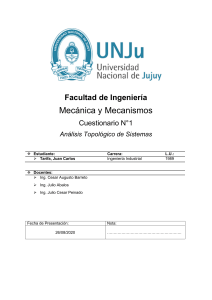
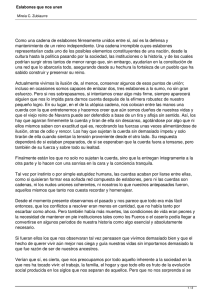
UNIVERSIDAD NACIONAL DE TRUJILLO Facultad de Ingeniería Escuela Profesional de Ingeniería Mecánica MOVILIDAD DE UN SISTEMA MECÁNICO Teoría de las Máquinas y los Mecanismos AUTORES : GUEVARA FLORES IRVING DOCENTE : Ing. RODRIGUEZ OCHOA, Jairo Javier CICLO : VI Trujillo, Perú 2020 “MOVILIDAD DE UN SISTEMA MECÁNICO” I. INTRODUCCIÓN: Mecanismo: Un mecanismo es un dispositivo que transforma el movimiento en un patrón deseable, y por lo general desarrolla fuerzas muy bajas y transmite poca potencia. Movilidad: La movilidad de un sistema mecánico (M) se puede clasificar de acuerdo con el número de grados de libertad (GDL) que posee. El GDL del sistema es igual al número de parámetros (mediciones) independientes que se requieren para definir de manera única su posición en el espacio en cualquier instante de tiempo. Tipos de movimiento Rotación pura: El cuerpo posee un punto (centro de rotación) que no tiene movimiento con respecto al marco de referencia “estacionario”. Todos los demás puntos del cuerpo describen arcos alrededor del centro. Una línea de referencia trazada en el cuerpo a través del centro cambia sólo su orientación angular. Traslación pura: Todos los puntos del cuerpo describen trayectorias paralelas (curvilíneas o rectilíneas). Una línea de referencia trazada en el cuerpo cambia su posición lineal pero no su orientación angular. Movimiento complejo: Una combinación simultánea de rotación y traslación. Cualquier línea de referencia trazada en el cuerpo cambiará tanto su posición lineal como su orientación angular. Los puntos en el cuerpo recorrerán trayectorias no paralelas, y habrá, en todo instante, un centro de rotación, el cual cambiará continuamente de ubicación. Vamos a explicar la manera de calcular los grados de libertad, permitiendo evaluar si estamos tratando con una estructura o mecanismo en función de los resultados obtenidos. Para comenzar, debemos entender algunos conceptos relacionados con los mecanismos: Una pieza es cada una de las partes indivisibles que componen un mecanismo Un miembro es un conjunto de piezas unidas rígidamente entre sí, no existiendo movimiento entre ellas. Los podemos clasificar en: o Miembros conductores o Miembros conducidos o Bastidores Denominamos par al conjunto formado por dos o más miembros de un mecanismo que están en contacto y tienen movimiento relativo entre ellos. Ejemplos de pares son el pistón-biela, biela-cigüeñal, cigüeñal-bastidor, bastidor-pistón… Una cadena cinemática es la agrupación de varios pares elementales, de manera que todos los miembros formen parte de dos pares simultáneamente. La cadena cinemática más sencilla consta sólo de dos miembros, por ejemplo, la cadena formada por un tornillo y su tuerca. Dicho esto, un mecanismo es una cadena cinemática a la que se le ha inmovilizado uno de sus miembros. A ese miembro fijo le denominamos bastidor. Podemos clasificar los mecanismos de la siguiente manera: En función de la movilidad de sus miembros o Desmodrómicos o de movilidad determinada o No desmodrómicos o de movilidad indeterminada En función del tipo de movimiento de sus miembros o Planos o Espaciales Los grados de libertad son el número de parámetros necesarios para definir su configuración geométrica, es decir, la posición en cada instante de todos sus miembros. Para su cálculo empleamos la fórmula de Grübler: Donde: G= grados de libertad N= número de miembros del mecanismo PI= número de pares binarios de un grado de libertad PII= número de pares binarios de dos grados de libertad Esta ecuación es muy importante, ya que nos permite determinar si nos encontramos ante un mecanismo o una estructura, y además nos indica el tipo de mecanismo o estructura. Tendremos los siguientes casos: G=1, mecanismo desmodrómico G=2, mecanismo no desmodrómico G=0, estructura estáticamente determinada (isostática) G=-1, estructura estáticamente indeterminada (hiperestática) Figura 01: Tipos de pares cinemáticos – Libro Norton II. OBJETIVOS: III. Diseñar mecanismos sencillos con movilidad en un software. Identificar y analizar la movilidad de los mecanismos básicos. Aplicar la ecuación de Gruebler y Kutzbach. Identificar los diferentes tipos pares cinemáticos en un mecanismo. DESARROLLO DE LA PRÁCTICA: Cada grupo deberá realizar las siguientes acciones: 1. Diseñar un mecanismo plano con las siguientes características: a. Que tenga un grado de libertad. b. Que sólo contenga pares cinemáticos de un grado de libertad. Figura 2: Simulación de pala de excavadora Calculo la movilidad: Se observa que existen cuatro eslabones en este mecanismo, además de que existen cuatro revolutas. Así: L = 4, P1 = 4 (4 revolutas), P2 = 0 Ahora: M = 3(L - 1) - 2 P1 - P2 = 3(4 - 1) - 2(4) - 0 = 1 Como se observa este mecanismo es simple ya que solo cuenta con un grado de libertad, del mecanismo complejo de una para de excavadora se extrajo dicho mecanismo, simplificando el diseño al buscar reproducir el movimiento común de una excavadora utilizando un mecanismo con eslabones Manivela – Balancín. Esto se corroborara en la simulación. 5. Diseñar mecanismo con las siguientes características: a. Que tenga un grado de libertad. b. Que contenga un par cinemático de dos grados de libertad. Figura 3: Simulación brazo transportador con trayectoria lineal. Calculo la movilidad: Se observa que existen seis eslabones en este mecanismo, además de que existen cinco revolutas y un par cinemático de dos grados de libertad (R y T). L = 4, P1 = 5(5 revolutas), P2 = 1(R y T) Ahora: M = 3(L - 1) - 2 P1 - P2 = 3(5- 1) - 2(5) - 1 = 1 Se observa un brazo con una corredera que permite tanto la traslación como la rotación considerándola por ende como un par cinemático con dos grados de libertad. Los demás pares cinemáticos solo son de revoluta. Según la ecuación este mecanismo cuenta con solo un grado de libertad. Trabajo de Investigación: Investigue un mecanismo de 1 GDL y otro de 2 GDL. Proporcione una imagen real de los mecanismos. Figura 4: Excavadora real M = 3(L - 1) - 2 P1 - P2 = 3(5- 1) - 2(5) - 0 = 2 El movimiento de la pala es un movimiento complejo que está ligado a los actuadores que en este caso se observan 2, lo que corrobora los dos grados de libertad. Figura 5: Llave de presión real M = 3(L - 1) - 2 P1 - P2 = 3(4- 1) - 2(4) - 0 = 1 Este mecanismo es muy simple y consta solo de 4 eslabones cuya función es hacer presión al ejercer una fuerza sobre los mangos extremos. IV. RESULTADOS Y CONCLUSIONES: Los mecanismos fueron diseñados, utilizando WorkingModel, tanto para las piezas así como para el ensamblaje. Con la ayuda de los conocimientos teóricos se realizaron los respectivos análisis sobre los mecanismos, identificando en cada uno de ellos a su número de eslabones asi mismo el número y tipo de unión utilizado. Creamos nuestros mecanismos así como sus modificaciones en base a eslabones simples, con dos uniones de (1GDL) y (2GDL). Se aplicó la ecuación de kutzbach y Gruebler y corroboramos que se cumplan las condiciones requeridas para cada mecanismo y modificación. V. REFERENCIAS BIBLIOGRÁFICAS: Norton, R. (2009). DISEÑO DE MAQUINARIA: Síntesis y análisis de máquinas y mecanismos. 4ta edición. (EDGAR, 2019) EDGAR, L. (2 de Septiembre de 2019). GRABCADCOMUNITY. Obtenido de GRABCADCOMUNITY: https://grabcad.com/library/plataforma-dealtura-ajustable-1