Cinemàtica
Fonaments Físics de l’enginyeria
Ramon Herrero Simon
Departament de Física i Enginyeria Nuclear
Universitat Politècnica de Catalunya
FONAMENTS FÍSICS DE L’ENGINYERIA
TEMA
Cinemàtica
1. Descripció del moviment: Vectors posició, velocitat i
acceleració
2. Moviments particulars: Velocitat constant, acceleració
consant, acceleració variable. Moviment parabòlic. Moviment
circular
3. Components intrínseques de l’acceleració
4. Velocitat relativa: Moviment en sistemes inercials
Bibliografia:
•P.A. Tipler,
Física para la ciencia y la tecnología, Ed. Reverté.
•R. A. Serway,
Física, Ed. McGraw-Hill, Méjico.
•W. E. Gettys, F. J. Keller y M. J. Skove
Física clásica y moderna, Ed. McGraw-Hill.
Galileo Galilei (1564-1642)
Descripció del moviment: Vectors posició, velocitat i acceleració
•Sistema de referència : O,{x,y,z}
Vector posició:
Posició en el sistema de referència O. Coordenades x,y i z
r
r
r
r
r (t ) = x(t )i + y (t ) j + z (t )k
z
Trajectòria
r(t)
y
O
Vector desplaçament:
x
Desplaçament sofert pel punt en un ∆t determinat
r
r
r
r
∆r = ∆x i + ∆y j + ∆z k
z
r(t)
O
x
∆r
r(t+∆t) y
Velocitat mitjana:
Relació entre el desplaçament sofert ∆r i l’increment de temps ∆t
z
r
r
∆r
vm =
∆t
r(t)
∆r
r(t+∆t) y
O
x
Velocitat instantània:
Variació de la posició en un cert instant de temps t. Tangent a la trajectòria
r
r
r
r
r
r
∆r dr dx r dy r dz r
v = lim ∆t →0
j + k = vx i + v y j + vz k
=
= i+
dt
∆t dt dt
dt
z
r(t)
O
x
v(t)
y
Acceleració mitjana:
Relació entre la variació de velocitat ∆v i l’increment de temps ∆t
r
r
∆v
am =
∆t
Acceleració instantània:
Variació de la velocitat en un cert instant de temps t.
r
r
r
r
r
r
∆v dv dv x r dv y r dv z r
a = lim ∆t →0
i+
j+
k = ax i + a y j + az k
=
=
dt
dt
dt
∆t dt
z
r(t)
O
x
a(t)
v(t)
y
En general:
Sabent r(t) podem obtenir v(t) i amb aquesta a(t)
r(t)
v(t)
r
r dr
v=
dt
a(t)
r
r dv
, a=
dt
I igualment, donades unes condicions inicials, sabent a(t) podem obtenir v(t) i amb aquesta r(t)
a(t)
v(t)
t
r r
r
r
r
dv = adt ⇒ v (t ) − v0 = ∫ adt
0
r(t)
t
r r
r
r
r
dr = v dt ⇒ r (t ) − r0 = ∫ v dt
0
Casos particulars:
Acceleració nul·la:
r
r
r dv
a=
= 0 ⇒ v = const
dt
r
t
r r
r
r
dr r
= v ⇒ r − r0 = ∫ v dt = v t
dt
0
Moviment rectilini uniforme:
a = 0 ⇒ v = v0
moviment unidimensional
⇒ x = x0 + v0t
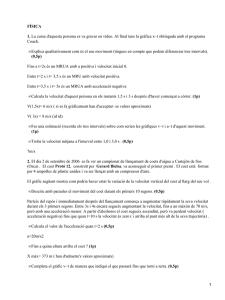
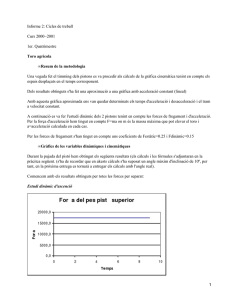
Exemple: Objecte desplaçant-se per sobre d’una superfície de gel sec.
Fregament menyspreable entre el gel i l’objecte
Fotografia estroboscòpica:
Un fotograma cada ∆t
∆t = 0.42 s.
v
x
r
∆r ∆x
= ,0,0 = const
∆t ∆t
r
∆v
=0
∆t
a=0
Acceleració constant:
r
t
r dv
r r
r
r
= const ⇒ v − v0 = ∫ adt = at
a=
dt
0
r
r r r
dr r r r
1r
= v = v0 + at ⇒ r = r0 + v0t + a t 2
dt
2
Cas unidimensional
quan
r r
v || a
Moviment rectilini uniformement accelerat:
a = const ⇒ v = v0 + at ⇒
1
x = x0 + v0t + at 2
2
⇒ v 2 = v02 + 2a ( x − x0 )
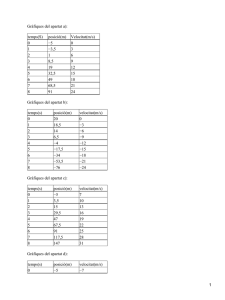
Moviment parabòlic:
Cas bidimensional
Eix x:
mov. rectilini uniforme
x = x0 + v x t
v x = v0 cosθ
Eix y:
mov. rectilini uniformement accelerat
1 2
gt
2
v y = v0 sin θ − gt
y = y0 + v y t −
y
v0
O
θ
(x0,y0)
Trajectòria:
y(x)
g
x
y ( x) = y0 + tan θ ( x − x0 ) −
g
2
(
x
−
x
)
0
2v0 cos 2 θ
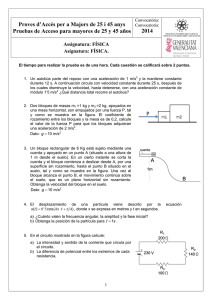
Moviment circular:
Moviment en 2 dimensions espacials:
•Coordenades cartesianes (x,y)
•Coordenades polars (r,θ)
y
ds
dθ
Relació entre elles
x = r cos θ
y = r sin θ
ds = R dθ
r(t)=R constant
θ(t) variable
R
θ
moviment unidimensional
x
Definim:
•Velocitat angular:
ω=
•Velocitat tangencial: v =
dθ
dt
[T ]−1
ds
dθ
=R
= Rω
dt
dt
•Acceleració angular:
•Acceleració tangencial:
α=
dω
dt
[T ]−2
dv
dω
=R
= Rα
dt
dt
Moviment circular uniforme:
α = 0 ⇒ ω = ω 0 ⇒ θ = θ 0 + ω 0t
•L’acceleració total no és nul·la
α =0 ,
r
r dv
a=
≠0
dt
La velocitat canvia la seva direcció
Moviment circular uniformement accelerat:
1
2
α = const ⇒ ω = ω 0 + αt ⇒ θ = θ 0 + ω 0t + αt 2
I igual que en el cas rectilini:
ω 2 = ω 02 + 2α (θ − θ 0 )
Components intrínseques de l’acceleració:
•Components extrínseques:
r
r
r
r
a = axi + a y j + az k
•Components intrínseques:
Base ortonormal: ut || v
y
v
En qualsevol interval prou petit de la trajectòria:
a
• v i a determinen el pla en el que es mou el mòbil en
aquest instant
•El moviment és circular de radi ρ (radi de curvatura)
ut
j
i
Sistema de referència un,ut centrat en el mov. circular :
r
r
r
un = cosθ i + sin θ j
r
r
r
ut = − sin θ i + cosθ j
un
ρ
θ
x
En el sistema de referència un,ut les derivades dels vectors directors compleixen:
r
r
r
u n = cos θ i + sin θ j
r
r
r
ut = − sin θ i + cosθ j
r
dun dθ r
=
ut
dt
dt
r
du t
dθ r
=−
un
dt
dt
•En aquest sistema amb r=ρ constant
derivant:
r
r
r = ru n
r
r dr r
du n
v = un + r
dt
dt
y
v
a
ut
j
r
dθ r
v =r
ut
dt
un
ρ
θ
i
x
r
2
r dv dr dθ r
d 2θ r
dθ r
i derivant altra vegada: a =
u n + r 2 ut − r
=
un
dt
dt
dt dt dt
r d 2 (rθ ) r
r
r
2r
a=
−
=
+
u
r
ω
u
a
u
a
u
t
n
t t
n n
dt 2
•Acceleració tangencial: Variació del mòdul
de la velocitat
d 2 (rθ ) d 2 s d ds dv
at =
= 2 =
=
dt 2
dt
dt dt dt
L’acceleració es pot expressar com a suma de dues
components, l’acceleració tangencial i l’acceleració normal
•Acceleració normal: Variació de la direcció
de la velocitat
v2
a n = − rω = −
r
2
Velocitat relativa:
Descripció del moviment en sistemes de referència inercials
Sistemes de referència inercials:
Són sistemes de referència no accelerats
Relació entre la posició del punt P en el sistema
O i en el sistema O’
z
r = r ' + o' o
Velocitat de O’ respecte O :
Vo 'o =
d o' o
dt
Derivant la posició respecte el temps
P
O
r
o'o
y
x
v = v' + Vo 'o
i tornant a derivar:
a = a'
Les lleis de la mecànica són les mateixes
en tots els sistemes inercials.
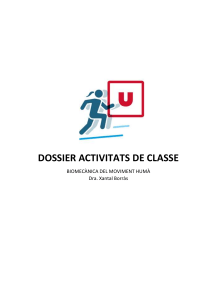
En sistemes de referència relativistes: Velocitats properes a la de la llum
En realitat lo anterior val per velocitats petites.
Segons la teoria de relativitat la màxima velocitat possible entre dos punts és la
velocitat de la llum:
Límit en la velocitat !!!!
c
c ¡ 3 ·108 m/s
La relació entre velocitats de dos sistemes inercials és en realitat:
v=
v' + Vo 'o
v' Vo 'o
1+ 2
c
A tenir en compte per cassos amb velocitats properes a c:
Partícules elementals, e-, atoms, i en astronomia