SISTEMA DE RECONOCIMIENTO Y MEDICIÓN DE HALOS DE DEGRADACIÓN PARA LA ESTIMACIÓN DE ACTIVIDAD FIBRINOLÍTICA MEDIANTE TÉCNICAS DE VISIÓN ARTIFICIAL
Anuncio

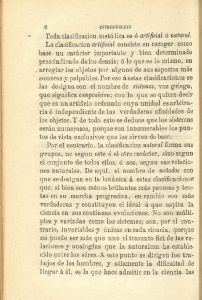
INGENIERÍA EN INFORMATICA PROYECTO DE TRABAJO FINAL DE CARRERA SISTEMA DE RECONOCIMIENTO Y MEDICIÓN DE HALOS DE DEGRADACIÓN PARA LA ESTIMACIÓN DE ACTIVIDAD FIBRINOLÍTICA MEDIANTE TÉCNICAS DE VISIÓN ARTIFICIAL Alumnos: Kilimik Rodrigo – Sandoval Manuel Director: Farm. Acosta Gabriela Matriculas: 65621 - 65856 Año: 2019 1 1. Tabla de Contenidos. 1. TÍTULO. ........................................................................................................................................... 3 2. PALABRAS CLAVES. ......................................................................................................................... 3 3. PLANTEAMIENTO DEL PROBLEMA. ................................................................................................ 3 4. OBJETIVOS. ..................................................................................................................................... 4 4.1 Objetivo general. ........................................................................................................................ 4 4.2 Objetivos específicos. ................................................................................................................. 4 5. ALCANCE. ........................................................................................................................................ 5 6. MARCO TEÓRICO. ........................................................................................................................... 5 6.1 Método de placa de fibrina. ....................................................................................................... 5 6.1.1 Actividad Fibrinolítica ............................................................................................ 5 6.1.2 Método de placa de fibrina para la estimación de la actividad fibrinolítica ......... 5 6.2 Visión artificial. ........................................................................................................................... 6 6.2.1 Concepto. .............................................................................................................. 6 6.2.2 Etapas de un Sistema de Visión Artificial. ............................................................. 6 6.2.3 Aplicaciones........................................................................................................... 8 6.2.4 Aplicaciones relacionadas. .................................................................................... 9 6.3 OpenCV..................................................................................................................................... 10 7. JUSTIFICACIÓN.............................................................................................................................. 11 8. METODOLOGÍA............................................................................................................................. 11 9. ACTIVIDADES Y CRONOGRAMA DE TRABAJO............................................................................... 12 10. BIBLIOGRAFÍA. .............................................................................................................................. 15 2 1. TÍTULO. Sistema de reconocimiento y medición de halos de degradación para la estimación de actividad fibrinolítica mediante técnicas de visión artificial. 2. PALABRAS CLAVES. Método de placa de fibrina. Enzimas Fibrinolíticas. Actividad Fibrinolítica. Procesamiento de imágenes digitales. Medición de halos de degradación. Visión Artificial. OpenCV. 3. PLANTEAMIENTO DEL PROBLEMA. En los proyectos de investigación científica la validez de los resultados depende directamente de que la metodología utilizada para obtenerlos esté libre de sesgo, mínimamente se debe analizar la presencia de errores en el diseño de investigación, los criterios de selección y en la forma de registrar y evaluar las variables intervinientes. Las fuentes de sesgo al hacer mediciones son: El instrumento de medición. El observador. Las personas que realizan la evaluación. Sujeto de estudio [1]. En el Instituto de Biotecnología Misiones (InBioMis) se encuentra en desarrollo una línea de investigación centrada en el estudio y producción de enzimas fibrinolíticas por hongos Agaricomicetes nativos de Misiones con potencial aplicación en la industria farmacéutica para uso en medicina cardiovascular trombolítica[2]. En una fase de la experimentación de dicha línea se utiliza un método denominado Método de Placa de Fibrina para Estimación de Actividad Fibrinolítica1 (M.P.F.) [3]. Este análisis requiere medir dos diámetros perpendiculares de los halos de degradación formados en una placa de Petri2; la medida puede ser tomada con diferentes herramientas (calibre manual, calibre digital, regla graduada, lector de zonas de inhibición [4]); en el InBioMis utilizan el calibre digital. A los fines de simplificar el nombre del método se utilizarán las siglas M.P.F. para denominarlo. Recipiente poco profundo y redondo, de cristal o plástico, usado en microbiología para el cultivo de microorganismos. 1 2 3 Figura 1: Halos de degradación de fibrina en placa de Petri. En la Figura 1 se observa una placa de fibrina con zonas de lisis correspondientes a la degradación de la fibrina por enzimas fibrinolíticas. En este escenario el observador es la principal fuente de sesgo debido a que la medición se ve afectada por la subjetividad del mismo dado que los halos son difusos y esto ocasiona que sea difícil determinar la expansión de los mismos. Por ejemplo, para un halo con 10 mm de diámetro, si se supone un sesgo de medición de tan solo +1 mm (11 mm) en cada diámetro perpendicular, entonces el error representa un 10%. Las técnicas y herramientas de visión artificial permiten identificar y reconocer formas en imágenes digitales, los que aplicados adecuadamente permiten establecer demarcaciones y determinar espacios y medidas. Estas tecnologías son propicias para brindar apoyo y sistematizar procesos con ciertos grados de automatización, debido a que el procesamiento digital de datos se realiza mediante recursos computacionales disponibles en la actualidad. 4. OBJETIVOS. 4.1 Objetivo general. Construir un prototipo de software basado en visión artificial para el reconocimiento y estimación del tamaño de halos de degradación resultante del método de la placa de fibrina. 4.2 Objetivos específicos. Analizar bibliografía y trabajos existentes sobre el M.P.F. para la estimación de actividad fibrinolítica, y sobre técnicas de visión artificial para reconocimiento y medición de figuras geométricas. Determinar los requerimientos específicos del InBioMis para la estimación de actividad fibrinolítica. Diseñar el sistema de reconocimiento y medición de halos de degradación para el M.P.F a partir de los requerimientos del ImBioMis. Desarrollar el modelo propuesto mediante la adaptación de las librerías de OpenCV. Planificar y ejecutar las pruebas de evaluación y ajustes del prototipo desarrollado. Analizar los resultados obtenidos frente a las mediciones manuales realizadas por los usuarios destinatarios del sistema. 4 5. ALCANCE. El presente trabajo estará acotado a los requerimientos específicos del InBioMis, por lo tanto, no se tendrán en cuenta requerimientos ajenos al Instituto. Se tendrán en cuenta únicamente los requerimientos funcionales, obviando los no funcionales. A partir de los diámetros perpendiculares de halos de degradación, el M.P.F. realiza una serie de cálculos para estimar la actividad fibrinolítica. El presente proyecto, mediante la visión artificial, se limitará únicamente al reconocimiento y estimación de la medida de esos diámetros. El proyecto estará enfocado en minimizar el error en los resultados de las mediciones de la actividad fibrinolítica introducidos por las fuentes de sesgo tanto del instrumento de medición como del observador; por lo tanto, no se tendrá en cuenta minimizar el sesgo pudiese introducirse a causa del evaluador ni del sujeto de estudio. Como salida del proceso se buscará que persistan los datos recolectados en cada experimento para poder compartirlos y reutilizarlos en análisis futuros. 6. MARCO TEÓRICO. En esta sección se introducen los conceptos a utilizar durante el desarrollo del proyecto final. Inicialmente se aborda el método de la placa de fibrina para la estimación de la actividad fibrinolítica debido a que representa los cimientos sobre los cuales se intenta construir una herramienta que facilite y optimice la medición de la unidad de estudio del mismo. A continuación, se expone el concepto de visión artificial junto con sus aplicaciones y para finalizar se presenta un conjunto de librerías ampliamente utilizadas para el desarrollo de aplicaciones en este campo. 6.1 Método de placa de fibrina. 6.1.1 Actividad Fibrinolítica Las enfermedades cardiovasculares representan la principal causa de muerte en el mundo, se estima que en el 2012 fallecieron aproximadamente 17 millones de personas y que para el año 2030 casi 23 millones de personas morirán por alguna afección cardiovascular[5]. Existen diversas causas que originan estas enfermedades, una de ellas es el mal funcionamiento del sistema Plasminógeno/Plasmina encargado de disolver los coágulos sanguíneos y como consecuencia se generan grandes residuos que quedan en circulación y pueden provocar diversas enfermedades en el sistema circulatorio[6]. Un coágulo de sangre se compone de una red de fibras de fibrina entrecruzada cuyo precursor es el fibrinógeno, una glicoproteína presente en el plasma, la acumulación de fibrina en la sangre puede llevar a trombosis, y esto puede derivar en ataques al corazón y otras enfermedades cardiovasculares[7]. En la sangre se encuentra presente una euglobulina denominada plasminógeno que se activa a plasmina, una enzima que se encarga de disolver las fibras de fibrina que componen los coágulos así como otros coagulantes proteicos como el fibrinógeno y factores de coagulación[8]. En resumen, se denomina actividad fibrinolítica a la capacidad que presenta una enzima para digerir las fibras de fibrina presentes en los coágulos sanguíneos. 6.1.2 Método de placa de fibrina para la estimación de la actividad fibrinolítica El método fue diseñado originalmente para la estimación de la actividad proteolítica en la sangre, pero puede utilizarse en la determinación de varias otras enzimas fibrinolíticas. Para llevar a cabo el procedimiento se coloca en una placa de Petri una solución de fibrinógeno coagulado mediante una solución de trombina, seguidamente con una pipeta se coloca una pequeña 5 cantidad de solución de la enzima a evaluar. El área de la fibrina digerida es una medida cuantitativa de la actividad de la enzima. Para obtener el área se realiza el siguiente procedimiento: 1. Se obtiene el diámetro total promediando de los diámetros perpendiculares del halo en cuestión y luego restando el diámetro del pocillo correspondiente a la siembra de la enzima. 𝑫𝒕 = 𝑫𝟏 + 𝑫𝟐 − 𝑫𝒑 𝟐 2. Se divide el diámetro por dos para obtener el Radio. 𝑹= 𝑫𝒕 𝟐 3. Se calcula el área de un círculo. 𝑨 = 𝝅𝑹𝟐 6.2 Visión artificial. 6.2.1 Concepto. La visión artificial (V.A.) es una disciplina científica que percibe información de un universo tridimensional a partir de una o varias imágenes bidimensionales. Un sistema de visión artificial (S.V.A.) es una serie de componentes que trabajando conjuntamente adquiere, procesa, analiza y mide diversas características de una representación de la realidad que le proporciona información sobre brillo, formas, colores, y otras propiedades del entorno físico. Estas representaciones de la realidad pueden ser imágenes estáticas o dinámicas. En ocasiones la complejidad del problema y/o la tecnología existente hacen que la capacidad humana sea la mejor solución, pero en otras, la capacidad de un S.V.A. para detectar y determinar las propiedades de los objetos facilitan a las personas la realización de tareas tediosas, difíciles y peligrosas como también la realización de algunas otras tareas que le serían imposibles, hacen que la V.A. sea la mejor solución. 6.2.2 Etapas de un Sistema de Visión Artificial. El ser humano es capaz de percibir la luz a través de sus ojos, descomponiendo la imagen compleja en elementos más simples, circulando esta información a través del nervio óptico hasta alcanzar el cerebro y ser procesado por el mismo para luego actuar en consecuencia. La V.A. en un intento por reproducir este comportamiento define tradicionalmente varias etapas. El diagrama en la imagen figura 2 muestra una de las metodologías más famosas, propuesta por Rafael C. González y Richard E. Woods [9]. La misma, no obliga a aplicar cada uno de los procesos como tampoco cada una de las interrelaciones; más bien, los procesos a aplicarse dependen directamente del dominio del problema y los objetivos. Por lo general, a mayor complejidad de la tarea de procesamiento de imágenes, mayor será la cantidad de módulos a utilizarse. Base de conocimiento: este es el paso previo a la definición de los métodos. Los datos conocidos previamente sobre el dominio del problema son codificados en forma de una base de datos. Este conocimiento puede ser tan simple como el detalle de las regiones de una imagen donde se encontraría al objeto de interés, el cual facilitaría la búsqueda; o bien tan complejo como una lista 6 interrelacionada de todos los principales defectos posibles en un problema de inspección de materiales. Adquisición: es el proceso inicial, y consiste en capturar la escena en una imagen digital mediante algún tipo de sensor óptico. Podría implicar una etapa de preprocesamiento, tal como el escalado. Realce: es una parte muy subjetiva del procesamiento de imágenes y consiste en, a través de técnicas de mejoramiento de imagen, resaltar detalles ocultos o bien las características que interesan en el dominio del problema. Un típico ejemplo sería el de aumentar el contraste. Restauración: también se ocupa de mejorar el aspecto de una imagen, pero a diferencia del realce, la restauración de la imagen es objetiva porque suelen basarse en modelos matemáticos o probabilísticos de degradación de la imagen; y el realce suele basarse en preferencias subjetivas del ser humano respecto a lo que constituye una "buena" mejora. Procesamiento de color: es un área que ha ido ganando importancia debido al aumento significativo en el uso de imágenes digitales a través de Internet. El color también se usa en como base para extraer características de interés en una imagen. Figura 2: Pasos fundamentales en el Procesamiento de imágenes digitales. Wavelets: son la base para representar imágenes en varios niveles de resolución. En particular, se utiliza para la compresión de datos de imágenes y para la representación piramidal, en la que las imágenes se subdividen sucesivamente en regiones más pequeñas. Compresión: trata con técnicas para reducir el almacenamiento requerido para guardar una imagen, o el ancho de banda requerido para transmitirla. La compresión de imágenes es familiar para la mayoría de los usuarios de computadoras en forma de extensiones de archivo de imagen, como la extensión de archivo jpg utilizada en el estándar de compresión de imagen JPEG (Joint Photographic Experts Group). En los últimos años los avances tecnológicos en cuanto al almacenamiento de información han crecido exponencialmente, no siendo así el caso de transmisión de la misma. Procesamiento morfológico: en esta etapa se comienza una transición de procesos que generan imágenes a procesos que generan atributos de esas imágenes. Extrae componentes de imágenes que son útiles en la representación y descripción de la forma del objeto de interés. Segmentación: su precisión depende directamente del éxito en la solución del problema de reconocimiento. Es un procedimiento que se encarga de dividir la imagen en las partes que la componen, normalmente separa del fondo de la imagen digital al objeto de interés. Es una de las tareas más difíciles en el procesamiento de imágenes digitales, pero clave para una solución robusta 7 en la identificación individual de objetos, ya que una segmentación débil implicaría fallos eventuales en el reconocimiento. Representación y Descripción: su objetivo es extraer atributos que describen las características físicas del objeto, como pueden ser su geometría, color, textura, entre otros. Generalmente reciben datos de pixeles sin procesar desde la etapa de segmentación, y el primer paso consiste en presentar los datos en un formato valido para su procesamiento informático. Estos pueden representarse de dos formas: la primera es en forma de límite, la cual es apropiada cuando las características de interés están en la forma externa del objeto; y la segunda es en forma de región, la cual es apropiada cuando se tiene interés en las propiedades internas del objeto como pueden ser su color o textura. El próximo paso consiste en especificar el método para describir los datos de forma que resalten las características de interés que dan como resultado información cuantitativa de interés y que, de ser necesario, le permitan al siguiente método poder clasificar al objeto. Reconocimiento: en base a los datos recibidos de la etapa de Representación y Descripción, y los datos conocidos del dominio del problema, este proceso se encarga de interpretar y clasificar al objeto. A grandes rasgos se pueden dividir a los métodos descriptos en dos categorías: métodos cuyas entradas y salidas son imágenes; y métodos cuyas entradas pueden ser imágenes, pero sus salidas son atributos de esas imágenes. 6.2.3 Aplicaciones. Sistema de visión artificial para determinar la fatiga en una persona con OpenCV. Figura 3: captura de un Sistema de visión artificial para estimar la fatiga en una persona con OpenCV. Sistema de Visión Artificial para la Detección y el Reconocimiento de Señales de Tráfico basado en Redes Neuronales. 8 Figura 4: Sistema de Visión Artificial para la Detección y el Reconocimiento de Señales de Tráfico basado en Redes Neuronales. NASA Ames desarrollo visión artificial para su Robot Rover K9. Utiliza un sistema de seguimiento visual que combina un rastreador basado en un punto de interés 2D y una técnica de alineación de formas 3D para realizar un seguimiento de las características y navegar hacia ellas. K9 también usa la visión para observar los obstáculos que presentan un peligro para el rover [10]. Figura 5: imagen procesada por el sistema de visión artificial para el Robot Rover K9 de NASA Ames. 6.2.4 Aplicaciones relacionadas. 6.2.4.1 Contador de unidades formadoras de Colonias. Es un sistema automático para el reconocimiento y conteo de unidades formadoras de colonias (UFC) utilizando técnicas de tratamiento digital de imágenes. El procedimiento se desarrolló para el control sanitario en el proceso de producción de leche de alta calidad y se caracteriza por su bajo costo a diferencia de los existentes en el mercado, el alto rendimiento y facilidad de uso. Se puede identificar que uno de los procedimientos claves es la segmentación [11]. 9 Figura 6: Procesamiento de imagen para conteo de Colonias. 6.2.4.2 Automatización de una cortadora de vaivén KASTO EBS 320 AU aplicando visión artificial para el corte de ejes acerados y análisis de la producción. Mediante la aplicación de visión artificial se logra automatizar cortador de que permite realizar múltiples cortes de aceros con formas circulares, sin la necesidad de un operario que supervise el proceso de medición o de corte. Uno parte del proceso consiste en medir el diámetro del circulo formado por el material a cortar. La implementación de la automatización en la cortadora, realizada por la Empresa IIP garantiza un bajo margen de error en cada una de las piezas cortadas, evitando así un desperdicio de materia prima, reduciendo pérdidas para la empresa. Adicionalmente, el proceso de automatización aportó a la reducción de los tiempos de corte, de esta forma optimiza el tiempo de trabajo de la máquina [12]. Figura 7: Medición del diámetro del material a cortar. 6.3 OpenCV. OpenCV es una biblioteca de software de Computer Vision y Machine learning, que por ser de código abierto facilita que cualquier persona pueda utilizar y modificar el código. Este proporciona una infraestructura común para las aplicaciones de visión artificial y para acelerar el uso de la percepción de la máquina en los productos comerciales. Tiene interfaces C ++, Python, Java y MATLAB y es compatible con Windows, Linux, Android y Mac OS. Está orientada principalmente hacia aplicaciones de visión en tiempo real. La biblioteca cuenta con más de 2500 algoritmos optimizados con su respectiva documentación explicativa de cada uno y además posee tutoriales, cursos y libros para muchos de 10 estos[13]. Estos algoritmos se pueden usar para detectar y reconocer rostros, identificar objetos, clasificar acciones humanas en videos, rastrear objetos en movimiento, extraer modelos 3D de objetos, unir imágenes para producir una resolución superior de una escena completa, encontrar imágenes similares de una base de datos, reconocer paisajes y establecer marcadores para superponerlos con realidad aumentada, etc. OpenCV cuenta con una comunidad de más de 47 mil usuarios activos y un número estimado de descargas superior a 18 millones. Esta biblioteca es utilizada ampliamente en empresas, grupos de investigación y por organismos gubernamentales. Junto con empresas bien establecidas como Google, Yahoo, Microsoft, Intel, IBM, Sony, Honda, Toyota que emplean la biblioteca, hay muchas otras empresas nuevas como Applied Minds, VideoSurf y Zeitera, que hacen un uso extensivo de ella[14]. 7. JUSTIFICACIÓN. Por medios de técnicas de reconocimiento y medición de imágenes digitales es posible determinar formas y medidas de manera automática; por esto se considera útil desarrollar una herramienta de software que sirva a los investigadores en la recolección de datos de la variable de interés (diámetro del halo de degradación), y que permita independizar el proceso de medición de la subjetividad del observador, con el objetivo de disminuir el sesgo proveniente de cada uno de los observadores mediante la estandarización del proceso de medición. En consecuencia, se contrastaría una importante diferencia de tiempo entre el proceso de medición actual y el propuesto, ya que la herramienta a desarrollar lo disminuiría significativamente, y esto a su vez evitaría el cansancio de los observadores debido a que es un experimento que conlleva varias horas y exige mucha atención. Esta solución también evitaría la necesidad de adquirir alguna de las herramientas que se encuentran en el mercado, que de hecho son costosos en relación a las prestaciones brindadas [4]. Adicionalmente, la herramienta funcionaría como un repositorio de información que persistirá los datos recolectados en cada experimento para compartirlos y reutilizarlos en proyectos futuros. Para complementar y facilitar el desarrollo, se decide utilizar la biblioteca orientada a visión artificial de OpenCV, por ser de código abierto permitiendo a cualquier persona utilizar y modificar su contenido. A su vez se considera que contenga una vasta cantidad de algoritmos optimizados con tutoriales, cursos y su documentación respectiva; además de una gran comunidad activa de usuarios. Las pruebas no se podrían realizar con mediciones en vivo/reales porque durante el plazo estimado para la realización de éstas con el software desarrollado, no se estaría realizando este experimento de medición de la actividad fibrinolítica. Es por esto que las pruebas se limitarán a realizarse con imágenes digitales de experimentos previos con que cuenta el ImBioMis. 8. METODOLOGÍA. La primera etapa del trabajo consistirá en el estudio del M.P.F. y de técnicas de visión artificial para el reconocimiento y medición de patrones circulares, considerando que los halos de degradación crecen radialmente. Para esto se recurrirá a fuentes de información primaria y secundaria, tales como papers, trabajos académicos y sitios web relacionados. Para determinar los requerimientos específicos del InBioMis se utilizará como técnica de recolección de información (o investigación de hechos) de fuentes primaria como ser entrevistas, muestreo de la documentación y bases de datos, como también observaciones del ambiente de trabajo. 11 En cuanto a la modelización de la herramienta de software se utilizará como base la metodología propuesta por Rafael C. González y Richard E. Woods. Una vez estudiado en profundidad el escenario y obtenido los requerimientos, se definiran los datos iniciales de la base de conocimiento y se decidirá cuales pasos fundamentales de la metodologia base se ajustan a las necesidades del problema. Se define a priori utilizar como lenguaje principal de programación la última versión estable de PHP3 (7.3) y JavaScript4 (1.8) disponible a la fecha de publicación debido a que los autores del trabajo poseen experiencia en la utilización de esto lenguajes. Para ordenar y simplificar el desarrollo se elige como Framework5 a Laravel6 por ser de código abierto. Se utilizará la biblioteca de visión artificial de (y/o código) de la plataforma de OpenCV para el desarrollo de la herramienta de software, pudiendo estos algoritmos ser modificados de ser necesario. A partir del diseño se desarrollará un prototipo para las pruebas que admita la fácil ejecución de distintos métodos en cada uno de los pasos fundamentales seleccionados para el escenario. Para las pruebas se utilizarán imágenes digitales reales brindadas por el InBioMis junto a los respectivos resultados obtenidos por los observadores. Estas imágenes fueron tomadas con cámaras digitales de celulares, y constan de 16 muestras por placa de Petri. Las pruebas consistirán en dos fases. En la primera se seleccionarán, en conjunción con uno de los entrevistados del InBioMis, unas pocas muestras que representen adecuadamente a todos los posibles casos y anomalías que se puedan dar en un experimento. Estas imágenes serán utilizadas para probar la implementación de las combinaciones de diferentes técnicas/algoritmos en cada uno de los pasos fundamentales que se observan en la figura 2 con el fin de seleccionar la que mayor precisión y exactitud posea. Seleccionada la mejor combinación de métodos, se desarrollará la versión final que permita ejecutar únicamente esa combinación. Reanudando las pruebas, se procede a la segunda fase, donde se medirán todas las imágenes de muestras obtenidas, y se contrastará con las mediciones reales de los observadores con el objetivo de determinar las conclusiones pertinentes al trabajo desarrollado. Este análisis será proporcionado por personas idóneas del InBioMis mediante encuestas determinando la eficiencia del modelo propuesto. 9. ACTIVIDADES Y CRONOGRAMA DE TRABAJO. El cronograma de actividades admitirá las siguientes etapas: Etapa 1. Analizar bibliografía y trabajos existentes sobre el M.P.F. para la estimación de actividad fibrinolítica, y sobre Técnicas de visión artificial para reconocimiento y medición de figuras geométricas. Actividad 1.1 Entrevistar a personas referentes del InBioMis. Actividad 1.2 Recopilación de información consultando las diferentes bibliografías. Etapa 2. Determinar los requerimientos específicos del InBioMis para la estimación de actividad fibrinolítica. Actividad 2.1 Identificar las necesidades de información analizando el dominio del problema. 3 Hipertext PreProcessor: Lenguaje de programación de código abierto ejecutado en el servidor. Lenguaje de programación ejecutado en el cliente o servidor. 5 marco de trabajo que establece una estructura para desarrollar y organizar un software. 6 Framework de código abierto desarrollado para PHP que simplifica y ordena el código. 4 12 Actividad 2.2 Definir cuáles serán las variables del sistema a desarrollar. Etapa 3. Diseñar el sistema de reconocimiento y medición de halos de degradación. Actividad 3.1 Analizar y definir los pasos fundamentales para el procesamiento de imágenes digitales que serán necesarios aplicar al escenario. Actividad 3.2 Analizar y Definir los diferentes métodos/algoritmos existentes en la librería OpenCV que se utilizarán para cada uno de los pasos fundamentales. Actividad 3.3 Definir los datos de la Base de conocimiento. Actividad 3.4 Diseñar el modelo del software. Etapa 4. Planificar las fases de prueba del Software. Actividad 4.1 Planificar la primera fase de pruebas. Actividad 4.2 Planificar la segunda fase de pruebas. Etapa 5. Desarrollar un prototipo de software de reconocimiento y medición. Actividad 5.1 Desarrollar el prototipo de software que permita la fácil ejecución de combinaciones de algoritmos elegidos en cada paso fundamental. Actividad 5.2 Ejecutar la primera fase de pruebas sobre el prototipo desarrollado. Actividad 5.3 Efectuar ajustes de precisión del prototipo desarrollado. Actividad 5.4 Desarrollar la versión definitiva del software. Actividad 5.5 Ejecutar la segunda fase de pruebas sobre la versión definitiva del software. Etapa 6. Analizar los resultados de mediciones manuales con las mediciones automáticas realizadas por el software y obtener conclusiones. Actividad 6.1 Contrastar los resultados de las mediciones manuales con las mediciones automáticas. Actividad 6.2 Evaluar los resultados conseguidos y obtener conclusiones sobre la solución propuesta. Se estima que la Trabajo Final de Carrera se desarrollará en un plazo aproximado de 5 (cinco) meses a partir de la fecha de aprobación de este documento. El desarrollo se estima de la siguiente manera: 13 Figura 8: Cronograma de actividades. 14 10. BIBLIOGRAFÍA. [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] M. Á. Villasís-Keever, H. Márquez-González, J. N. Zurita-Cruz, G. Miranda-Novales, and A. Escamilla-Núñez, “El protocolo de investigación VII. Validez y confiabilidad de las mediciones,” Rev. Alerg. Mex., 2018. P. D. Z. G.A. Acosta, M.I. Fonseca, J.I. Fariña, “Detección de actividad fibrinolítica en hongos nativos de Misiones,” in Jornadas Científico Tecnológicas, UNaM, 2018. T. Astrup and S. Müllertz, “The fibrin plate method for estimating fibrinolytic activity,” Arch. Biochem. Biophys., 1952. “Lector de zona de inhibición Scan 500.” [Online]. Available: https://www.interscience.com/es/productos/Lector-de-zonas-de-inhibicion473/Scan-r-500-inhibition-zone-reader-1407. [Accessed: 27-Apr-2019]. © Copyright Organización Mundial de la Salud (OMS), “OMS | ¿Qué son las enfermedades cardiovasculares?,” WHO, 2015. O. Cañas Bermúdez, D. A. Rojas, and L. F. Arbeláez Ramírez, “Determinación del tiempo de lisis del coágulo humano (in vitro) con el plasminógeno/plasmina de cuatro especies: humano, bovino, caprino y porcino,” Rev. Med. Vet. (Bogota)., 2015. O. A. Kudryavtseva, Y. E. Dunaevsky, O. V. Kamzolkina, and M. A. Belozersky, “Fungal proteolytic enzymes: Features of the extracellular proteases of xylotrophic basidiomycetes,” Microbiology, 2008. J. E. Hall, “Guyton E Hall Tratado De Fisiologia Médica,” Elsevier. 2011. R. C. Gonzalez and R. Eugene Woods, Tratamiento digital de imagenes / Rafael C. Gonzalez, Richard E. Woods. 2019. “NASA Machine Vision for Robotics.” [Online]. Available: https://www.nasa.gov/centers/ames/research/technology-onepagers/machinevision.html. [Accessed: 14-Jun-2019]. C. Peña, L. Peña, and G. Moreno, “Sistema de Visión Artificial para el Reconocimiento y el Conteo de Unidades Formadoras de Colonia (UFC),” Rev. Colomb. Tecnol. Av., 2011. Christian Paul Proaño Tipantasi, “Automatización de una Cortadora de Vaivén Kasto Ebs 320 AU Aplicando Visión Artificial+--,” Universidad Politécnica Salesiana Sede Quito, 2013. S. Brahmbhatt, Practical OpenCV. 2013. “OpenCV.” [Online]. Available: https://opencv.org/. [Accessed: 03-Jul-2019]. 15