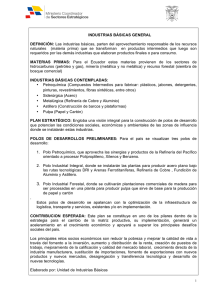
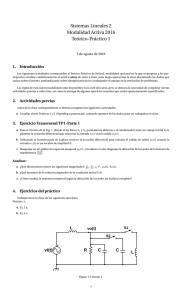
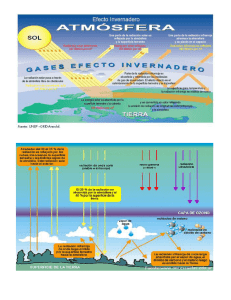
TECNOLOGICO DE MEXICO DINAMICA DE SISTEMAS ROUSS DOWZON ALUMNO reducción de bloques, transformada de Laplace con fracciones parciales, respuesta en el tiempo TEMA CARRERA: MECATRONICA SEMESTRE: 9 GRUPO: A INDICE REDUCCIÓN DE DIAGRAMAS DE BLOQUES................................... 3 DIAGRAMAS DE BLOCKS ............................................................... 3 EJEMPLO: SIMPLIFICAR EL DIAGRAMA DE BLOCKS ................ 4 EJEMPLO: ........................................................................................ 6 RESPUESTA EN EL TIEMPO ............................................................. 8 POLOS, CEROS Y REPUESTA DE UN SISTEMA ..........................10 POLOS DE UNA FUNCION DE TRANSFERENCIA ........................10 CEROS DE UNA FUNCION DE TRANSFERENCIA .......................10 POLOS Y CEROS DE UN SISTEMAS DE PRIMER ORDEN: EJEMPLO ........................................................................................11 TRANSFORMADA INVERSA DE LAPLACE MEDIANTE LA EXPANSIÓN EN FRACCIONES PARCIALES....................................14 EXPANSIÓN EN FRACCIONES PARCIALES .................................15 G(S) TIENE POLOS SIMPLES ........................................................15 G(S) TIENE POLOS DE ORDEN MÚLTIPLE ..................................16 G(S) TIENE POLOS COMPLEJOS CONJUGADOS SIMPLES .......18 BIBLIOGRAFÍA ..................................................................................20 REDUCCIÓN DE DIAGRAMAS DE BLOQUES Diagramas de blocks Los diagramas de blocks son una representación gráfica de las ecuaciones que describen el comportamiento de un sistema. Esta representación puede ser simplificada mediante el siguiente álgebra de blocks. Transformación Ecuación Diagrama original Diagrama equivalente w G1 z Blocks en cascada z G2 y x G3 y G2 z G1 w x G3 G2 G1 w x G1 G2 x G1 1 G1 G2 y G3 x x Blocks en cascada y G1 x G2 x x + Blocks y G1 + G2 en y G1 ( x G2 y) y G1 G2 y y retroalimentación x Desplazamiento de z G1 ( x y) un punto de suma después de un block y + G1 z x y G1 + G1 z x G1 + y Desplazamiento z x + y 1 G1 de z G1 x y z G1 un punto de suma antes de un block x y G1 x Desplazamiento x y G1 x 1 G1 de y G1 x un punto de toma después de un block x y G1 y Desplazamiento x y de y G1 x G1 y G1 un punto de toma antes de un block Cambio de puntos de w x y z x + + y w x + + z z y z z w suma Separación de un w x y z x + y w punto de suma Ejemplo: Simplificar el diagrama de blocks x + y + w R(s) + + - - G2 G1 G3 H1 + C(s) + G4 H2 R(s) + + - - G3 G4 G1G2 C(s) H1 H2 R(s) + - G1G2 1 G1G2 H1 G3 G4 C(s) H2 R(s) + - G1G2 (G3 G4 ) 1 G1G2 H1 C(s) H2 R(s) G1G2 (G3 G4 ) 1 G1G2 H1 G1G2 (G3 G4 ) 1 H2 1 G1G2 H1 C(s) G1G2 (G3 G4 ) 1 G1G2 H1 G1G2 (G3 G4 ) H2 R(s) C(s) EJEMPLO: H3 R(s) + - G1 + - + - G2 G3 C(s) H2 H1 H3 R(s) + - G1 + - + - G2 G3 H2 C(s) 1 G3 H1 H3 R(s) G1 + + - - - + H2 G1 C(s) G2 G3 H1 1 G3 R(s) G1 G2 G3 1 G2 G3 H3 + + H2 1 G3 + G1 H1 R(s) G1 + - G2 G3 1 G2 G3 H3 H2 G1H1 R(s) G1 + - C(s) G2 G3 1 G2 G3 H3 C(s) 1 G3 C(s) H2 G1 H1 G3 R(s) G1 R(s) G2 G3 1 G2 G3 H 3 G2 G3 H G1 H1 1 2 1 G2 G3 H 3 G3 G1G2 G3 1 G2 G3 H3 G2 ( H2 G1 H1 ) C(s) C(s) RESPUESTA EN EL TIEMPO la respuesta de un sistema de control, o un elemento del sistema, está formada de dos partes: La respuesta transitoria: es la parte de la respuesta de un sistema que se presenta cuando hay un cambio en la entrada y desaparece después de un breve intervalo. La respuesta en el estado estable: es la respuesta que permanece después de que desaparecen todos los transitorios. señales de prueba típicas: La señal de prueba regularmente son funciones escalón, rampa, impulso, senoidal etc. Con estas señales de prueba es posible realizar con facilidad análisis matemáticos y experimentales de sistemas de control, dado que las señales son funciones muy simples. Constante de tiempo: es el tiempo que tarda el sistema en alcanzar del 63.2% de su cambio total. t=T conforme más pequeña es la constante de tiempo la respuesta del sistema es más rápida. Tiempo de estabilización; o tiempo de respuesta es el tiempo que necesita la curva de respuesta para realizar la línea de 2% del valor final, o cuatro constantes de tiempo. t=4T POLOS, CEROS Y REPUESTA DE UN SISTEMA la respuesta de salida de un sistema es la suma de dos respuestas: la respuesta forzada y la respuesta libre. Aun cuando numerosas técnicas, por ejemplo, la solución de una ecuación diferencial o tomar la transformada inversa de Laplace. El concepto de polos y ceros, fundamental para el análisis y diseño de un sistema de control, simplifica la evaluación de la respuesta de un sistema. El lector debe dominar los conceptos de polos y su aplicación a problemas en todo este libro. Empecemos con definiciones. POLOS DE UNA FUNCION DE TRANSFERENCIA los polos de una función son 1) los valores de la variable de la transformada de la place, s, que ocasiona que la función de la función de transferencia se vuelva infinita o 2) cualquiera raíz del denominador de la función de transferencia que son comunes a las raíces del numerador. CEROS DE UNA FUNCION DE TRANSFERENCIA Los ceros de una función de transferencia son 1) los valores de las variables de la transformada de Laplace, s, que ocasiona que la función de transferencia se convierta en cero o 2) cualquiera raíz del numerador de la función de transferencia que sean comunes o las raíces del denominador. estrictamente hablando, los ceros de una función de transferencia satisfacen la definición 1. (Por ejemplo, las raíces del numerador son valores de s que hacen que la función 1. (Por ejemplo, las raíces del numerador son valores de s hacen que la función de transferencia se haga cero. sin embargo, si un factor del numerador puede ser cancelado por el mismo por el mismo factor del denominador, la raíz de este factor cancelado del numerador recia el nombre de cero, aun cuando la función de transferencia no sea cero en este valor. Por lo tanto, incluidos la definición. POLOS Y CEROS DE UN SISTEMAS DE PRIMER ORDEN: EJEMPLO Dada la función de transferencia G(s) de la fig 4.1(a), existe un polo en s=-5 y, un cero en -2. Estos valores están graficados en el plano s complejo de la figura 4.1(b), usando una x para el polo y una O para el cero. Para demostrar las propiedades de los polos y ceros, encontremos la respuesta de escalón unitario del sistema. Si multiplicamos la función de transferencia de la fig. 4.1(a) por la función de escalón, resulta donde entonces Del desarrollo resumido en la figura 4.1(c). se llega a las siguientes conclusiones: 1. un polo de función de entrada genera la forma de la respuesta forzada (es decir, el polo en el origen de una función de escalón a la salida.) figura 4.1 2. Un polo de la función de transferencia genera la forma de la respuesta libre (es decir, el polo en -5 produjo 𝑒 −5𝑡 . 3. un polo en el eje real genera una respuesta exponencial de la forma 𝑒 −ἀ , donde - ἀ es la posición del polo sobre el eje real negativo, con más rapidez decaerá a cero la respuesta transitoria exponencial (es decir, otra vez el polo en -5 genero 𝑒 −5𝑡 , para el caso general vea la fig 4.2 4. Los cero y polos generan amplitudes para las respuestas forzadas y libre [ esto se puede ver del cálculo de A y B de la ecuación (4.1)]. TRANSFORMADA INVERSA DE LAPLACE MEDIANTE LA EXPANSIÓN EN FRACCIONES PARCIALES En la mayoría de los problemas de sistemas de control, la evaluación de la transformada inversa de Laplace no recae en el uso de la integral de inversión de la ecuación (2-23). Más bien, la operación de la transformada inversa de Laplace que involucra funciones racionales se puede realizar mediante el empleo de la tabla de transformadas de Laplace y la expansión en fracciones parciales. Esta última y la búsqueda de la transformada inversa en la tabla de transformadas se pueden realizar a través de programas de computadora. EXPANSIÓN EN FRACCIONES PARCIALES Cuando la solución mediante la transformada de Laplace de una ecuación diferencial es una función racional en s, se puede escribir como: en donde P(s) y Q(s) son polinomios en s. Se supone que el grado de P(s) en ses mayor que el de Q(s). El polinomio P(s) se puede escribir como: en donde a0, a1, ... , ªn-l son coeficientes reales. Los métodos de la expansión en fracciones parciales serán dados para los casos de polos simples, polos de orden múltiple y polos complejos conjugados de G(s). G(S) TIENE POLOS SIMPLES Si todos los polos de G(s) son simples y reales, la ecuación (2-40) se puede escribir como: en donde s1 ≠ s2 ≠…. ≠sn. Al aplicar la expansión en fracciones parciales, la ecuación (2-42) se escribe como: El coeficiente Ksi (i = 1, 2, ... , n) se determina al multiplicar ambos miembros de la ecuación (2-42) o de la ecuación (2-43) por el factor (s + s1) y después se hace que s sea igual a -s;. Para encontrar el coeficiente Ksi' por ejemplo, se multiplican ambos miembros de la ecuación (2-42) por (s + s1) y se hace que s = -s1• Por lo que, que se expande en fracciones parciales como: Por lo que la ecuación (2-46) se convierte en: G(S) TIENE POLOS DE ORDEN MÚLTIPLE Si r de los n polos de G(s) son idénticos, o se dice que el polo en s = -s; es de multiplicidad r, G(s) se escribe: Los (n - r) coeficientes, Ks1, Ks2, ••• , Ks(n-r)' que corresponden a los polos simple.s, se pueden evaluar con el método descrito por la ecuación (2-44). Las ecuaciones para determinar los coeficientes que corresponden a los polos de orden múltiple se describen como sigue: EJEMPLO: G(S) TIENE POLOS COMPLEJOS CONJUGADOS SIMPLES La expansión en fracciones parciales de la ecuación (2-43) también es válida para los polos complejos conjugados simples. Debido a que los polos complejos conjugados son más difíciles de manejar y son de interés especial en los estudios de sistemas de control, merecen un tratamiento especial. Suponiendo que G(s) de la ecuación (2-40) contiene un par de polos complejos: s = -a + jw and s = -a – jw Los coeficientes correspondientes de estos polos son: EJEMPLO: BIBLIOGRAFÍA Kuo, B. C. (1996). sistema de control automatico. mexico: Prentice-hall hispanoamericana S.A. Nise, N. S. (2004). sistema de control para ingenieria . california : continental. ogata, k. (1987). Dinamica de sistemas. mexico: prentice-hall hispanoamericana. S.A.