análisis e implementación del sistema de control
Anuncio

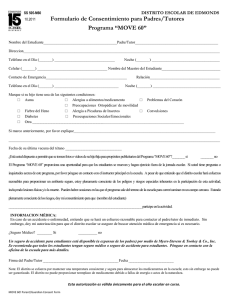
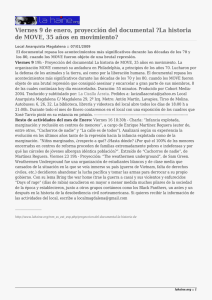
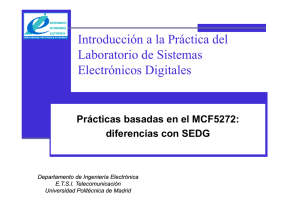
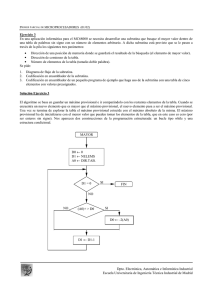
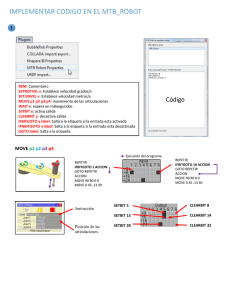
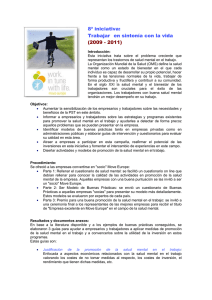
ANÁLISIS E IMPLEMENTACIÓN DEL SISTEMA DE CONTROL ADAPTIVO AUTOAJUSTABLE PARA UN MOTOR DC DE EXCITACIÓN INDEPENDIENTE SUJETO A CARGAS NO LINEALES, VÍA DSP Agustín Gutiérrez Páucar Jorge Luis Inca Rodríguez ANÁLISIS E IMPLEMENTACIÓN DEL SISTEMA DE CONTROL ADAPTIVO AUTOAJUSTABLE PARA UN MOTOR DC DE EXCITACIÓN INDEPENDIENTE SUJETO A CARGAS NO LINEALES, VÍA DSP Primera edición digital Julio, 2011 Lima - Perú © Agustín Gutiérrez Páucar Jorge Luis Inca Rodríguez PROYECTO LIBRO DIGITAL PLD 0163 Editor: Víctor López Guzmán http://www.guzlop-editoras.com/ [email protected] [email protected] facebook.com/guzlop twitter.com/guzlopster 428 4071 - 999 921 348 Lima - Perú PROYECTO LIBRO DIGITAL (PLD) El proyecto libro digital propone que los apuntes de clases, las tesis y los avances en investigación (papers) de las profesoras y profesores de las universidades peruanas sean convertidos en libro digital y difundidos por internet en forma gratuita a través de nuestra página web. Los recursos económicos disponibles para este proyecto provienen de las utilidades nuestras por los trabajos de edición y publicación a terceros, por lo tanto, son limitados. Un libro digital, también conocido como e-book, eBook, ecolibro o libro electrónico, es una versión electrónica de la digitalización y diagramación de un libro que originariamente es editado para ser impreso en papel y que puede encontrarse en internet o en CD-ROM. Por, lo tanto, no reemplaza al libro impreso. Entre las ventajas del libro digital se tienen: • su accesibilidad (se puede leer en cualquier parte que tenga electricidad), • su difusión globalizada (mediante internet nos da una gran independencia geográfica), • su incorporación a la carrera tecnológica y la posibilidad de disminuir la brecha digital (inseparable de la competición por la influencia cultural), • su aprovechamiento a los cambios de hábitos de los estudiantes asociados al internet y a las redes sociales (siendo la oportunidad de difundir, de una forma diferente, el conocimiento), • su realización permitirá disminuir o anular la percepción de nuestras élites políticas frente a la supuesta incompetencia de nuestras profesoras y profesores de producir libros, ponencias y trabajos de investigación de alta calidad en los contenidos, y, que su existencia no está circunscrita solo a las letras. Algunos objetivos que esperamos alcanzar: • Que el estudiante, como usuario final, tenga el curso que está llevando desarrollado como un libro (con todas las características de un libro impreso) en formato digital. • Que las profesoras y profesores actualicen la información dada a los estudiantes, mejorando sus contenidos, aplicaciones y ejemplos; pudiendo evaluar sus aportes y coherencia en los cursos que dicta. • Que las profesoras y profesores, y estudiantes logren una familiaridad con el uso de estas nuevas tecnologías. • El libro digital bien elaborado, permitirá dar un buen nivel de conocimientos a las alumnas y alumnos de las universidades nacionales y, especialmente, a los del interior del país donde la calidad de la educación actualmente es muy deficiente tanto por la infraestructura física como por el personal docente. • El p e r s o n a l d o c e n t e j u g a r á u n r o l d e t u t o r, f a c i l i t a d o r y c o n d u c t o r d e p r o y e c t o s de investigación de las alumnas y alumnos tomando como base el libro digital y las direcciones electrónicas recomendadas. • Que este proyecto ayude a las universidades nacionales en las acreditaciones internacionales y mejorar la sustentación de sus presupuestos anuales en el Congreso. En el aspecto legal: • Las autoras o autores ceden sus derechos para esta edición digital, sin perder su autoría, permitiendo que su obra sea puesta en internet como descarga gratuita. • Las autoras o autores pueden hacer nuevas ediciones basadas o no en esta versión digital. Lima - Perú, enero del 2011 “El conocimiento es útil solo si se difunde y aplica” Víctor López Guzmán Editor Memorias - XVII CONIMERA Análisis e implementación del sistema de control adaptivo autoajustable para un motor DC de excitación independiente sujeto a cargas no lineales, vía DSP Ing. Agustín Gutiérrez Páucar Ing. Jorge Luis Inca Rodríguez FIEE-UNI FIIS-UTP Resumen.- Mostramos los métodos de control adaptivo y control autoajustable vía tarjeta de procesamiento digital de señales, para controlar la posición y velocidad de un motor de excitación independiente, con rotor unido solidariamente a una varilla de aluminio, la cual toma una posición determinada mediante un controlador digital programado en lenguaje ensamblador. Introducción Se hace manifiesto de la utilidad del filtro RLS, con una introducción al filtro de Kalman, que es recursivo, disponiendo de un observador que utiliza resultados del algoritmo de identificación de parámetros bajo el principio de mínimos cuadrados, constituyendo así el control autoajustable, la estimación de parámetros sigue al proceso en todo instante y una etapa de control que utiliza los resultados del observador. Se siguen detenidamente las pruebas referidas en [8] llevadas a cabo en una PC y programado en C para un control adaptivo que trata de cumplir lo expuesto en [9], y así poder ajustar los cálculos al procesador digital de señales, donde se demuestran con experiencias ajustadas para usar dicho procesador. Las experiencias efectuadas con el programa en C para realizar estudios del microcontrolador fueron tres, la primera para un ángulo constante de 45º, la segunda para una excursión de 45º a 30º y una tercera para excursión de 10º a 350º, todas ellas satisfaciendo los criterios fraccionarios del lenguaje emsamblador del DSP. Aunque también es factible el uso de números enteros para aproximar valores mayores que 1 [12]. Para evaluar el observador y el control se utiliza las constantes obtenidas por matlab para la constante de Kalman y para la de control que ofrecen excelentes resultados dado que es extremadamente complicado poder extraerlos del Programa en C. Programa de control adaptivo de lenguaje C ofrece excelentes prestaciones y cumple requerimientos de control que permite adecuar el programa en el lenguaje ensamblador del DSP que tiene limitaciones así como también el DSP es muy bueno para realizar cálculos y operaciones repetitivas en el caso del uso de contadores en los sucesivos tiempos de muestreo. Se tiene en cuenta que el modelo lineal considera los datos durante un intervalo de tiempo de discretización como constantes. Además se fijan las incertidumbres y perturbaciones a cero. Para el aspecto del muestreo se utiliza el PLL del microcontrolador para una frecuencia de operación de 60 MHZ junto con el timer que sé programa para tener los datos del control u, y mantenerlos en el puerto paralelo del microcontrolador por el tiempo de discretización. También se tiene el siguiente esquema que pone de manifiesto el trabajo de conjunto de las diversas herramientas de cálculo para realizar un programa en lenguaje ensamblador de DSP como son Matlab, programa en C, tarjeta Lab PC. ver figura 1. 395 Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica durante corto periodo de tiempo sé esta logrando evitar el sobreimpulso y los problemas que ello deriva. Bases teóricas Fig.1: Los procesos de los DSPs para sistemas de control. A continuación se muestra el esquema general utilizado de la referencia [2] para la planta implementada en el laboratorio y que sé muestra en la figura 2. La introducción relativamente reciente del DSP, ha alterado el campo del servocontrol. El advenimiento de las técnicas digitales ha presentado gran flexibilidad para los algoritmos de control. Además la disposición del diagnóstico y de la información de estados convertida en una simple operación. Sin embargo la lectura del sensor de posición tiende a decidirse por usar la tarjeta LAB PC y leerlo de la computadora en algún puerto de datos o vía software usando la interface de comunicación serial (SCI), pero los datos también están disponibles completamente con los datos de salida del programa en C. Esencialmente el control adaptivo es aquel que cambia su comportamiento conforme a las nuevas circunstancias, intuitivamente, en un controlador adaptivo se tiene que es un controlador que modifica su comportamiento en respuesta a los cambios en la dinámica del proceso y en el carácter de las perturbaciones. En esta sección se expondrá el sistema de control adaptivo autoajustable expresado en [7] y [9] , la implementación en programación de Lenguaje C de un programa adaptivo se tiene en [8] y finalmente lo que he podido obtener en programación de lenguaje ensamblador del que se trata en la presente investigación siguiendo la implementación de los anteriores trabajos. La técnica del control adaptivo Básicamente cuando nos referimos al control adaptivo es aquel que cambia su comportamiento de acuerdo a las nuevas circunstancias. Intuitivamente un controlador adaptivo modifica su comportamiento en respuesta a la dinámica del proceso y al carácter de las pertubaciones. Considerando las dos técnicas de control adaptivo que veremos aplicadas al sistema físico para ver su respuesta a una señal de referencia constante en mantenerla (dejar igual) en presencia de disturbios (que podemos hacer cero o un nivel constante) tener dicha señal de referencia en la salida, proceso de regulación que identifica al control de posición que estudiamos. La función de transferencia G(z) de la planta es: G ( z) = Fig.2: El DSP utilizado para controlar un motor de corriente continua de excitación independiente. Debido al tiempo que se ha dejado de utilizar la planta la encontramos con distorsión por lo que se tuvo que hacer ajustes de entrada lo que anuló la distorsión y permitió comprobar que en el programa los parámetros de la planta no varían significativamente con lo que se ha podido hacer ajustes en el programa en lenguaje ensamblador, pero el sobreimpulso inicial que todavía estaba presente se limita utilizando referencia variable 396 b1 z −1 + b 2 z −2 1 + a 1z −1 + a 2z −2 = Y( z) U (z) (1) Los valores nominales de los parámetros de la planta son: a1= -1.6246, a2=0.6246, b1=0.041, b2=0.0479. Un regulador adaptivo debe incluir coeficientes ajustables tales que muestra el estado o comportamiento de la planta a cada instante, con un adecuado algoritmo que optimiza o prolonga el rango de funcionamiento del proceso. Los diferentes tipos de control adaptivo se Memorias - XVII CONIMERA diferencian en como cambian o ajustan los coeficientes del control. En este artículo se trata el control adaptivo con modelos paralelos y seriales de referencia que, junto con el control autoajustable son los únicos esquemas que han tenido aplicaciones practicas hasta la fecha. El control adaptivo con modelo de referencia paralelo es aquel situado en paralelo al sistema de bucle cerrado que en principio puede resolver el problema de control de seguimiento pero no el problema de control de posición. Un problema de control de seguimiento es cuando la referencia (r(k)) varia y se considera que no hay perturbaciones (d(k)) presentes en la salida y(k). El modelo paralelo es conveniente para solucionar el problema de comunicación lo que es demostrado por el que para solucionar esto sé requiere señales de control razonables, este modelo es conveniente para solucionar problemas de regulación y es demostrado por que en este caso se aceptan señales gaussianas para el control. Obtenemos señales aleatorias de control por que el error estimado diferencia entre la salida del modelo paralelo de referencia y la del sistema) converge a cero durante un ciclo de discretización. Para atenuar la señal de control, un modelo serial de referencia (en serie con la estimación del error) se puede agregar a la estructura. Esto supone convergencia a cero, con la elección de una reacción dinámica, que es menos severa que el caso anterior. Un sistema de control adaptivo que comprende un bucle interno de controlador adaptivo, autoajustable y RLS inclusive, sino también un bucle externo como controlador de parámetros para mantener la perfomance del sistema cuando hay variación en el proceso de la parametrización. Este segundo bloque es también de lazo cerrado. La variable controlada nos indica la perfomance del sistema. El arreglo se muestra esquemáticamente en la figura 3. Fig 3.- Control Adaptivo de lazo cerrado usando modelos de referencia. Este tipo de control adaptivo ofrece la ventaja de poder acomodar por separado el seguimiento y los problemas de regulación. Esto es porque la perfomance deseada del sistema controlado es definido por un modelo paralelo para el problema de seguimiento y por un modelo serial para el problema de regulación. Parámetros desconocidos del sistema En el caso adaptivo, por la estructura del controlador sus parámetros son iguales a los parámetros conocidos del sistema, excepto cuando sustituimos los sistemas invariantes por variantes. El papel del controlador adaptivo, o externo, es obtener los parámetros correctos usando realimentación, la ecuación del controlador de parámetros autoajustable viene dado por: U (k ) = [ 1 Bp ( q −1 ).R ( k ) − R (k , q −1 ).Y (k ) − Bˆ s (k , q −1 ).U (k − 1) bˆ0 (( k ) ] ( 2) Donde:bo(k),ro(k),..,bs1(k),son las estimaciones de los parámetros al tiempo de k. Por definición del vector de sintonización θ(k) y el vector de mediciones ψ(k) por las siguientes expresiones: [ θˆT ( k ) = bˆ0 (k ) bˆs 0 ( k ) rˆ0 (k ) rˆ1 (k ) ] (3) ψ (k ) = [U( k ) U(k − 1) Y(k ) Y( k − 1)] ( 4) La ecuación del controlador puede ser reescrita en la forma: T B p (q −1 ) − R (k ) = θˆ (k ).ψ ( k ) (5) Determinación de parámetros del controlador Los parámetros del regulador autoajustable se determinan por el criterio de los mínimos cuadrados que se basan en las condiciones asintóticas de estabilidad dictadas por el modelo de proceso de error. La exactitud para estimar el vector de parámetros en el tiempo k de tal manera que reduzca al mínimo la suma de los cuadrados de los errores filtrados entre el proceso y el modelo concluido en un horizonte de tiempo de las medidas en un tiempo k. Esto es expresado por la relación siguiente: k k i =1 i =1 J1 ( k ) = ∑ es 2 (i ) = ∑ [ Ap (q −1 ).(Y (i ) − Yref (i )]2 (6) 397 Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica Sistemas discretos no lineales Diseño estimador cuadratico lineal y discreto Nos referimos a sistemas continuos que hemos discretizado. Los sistemas no lineales hay que li- nealizarlos y entrar en un proceso de simulación. La linearización se establece para sistemas invariantes y discretizados, para los sistemas siso en el caso de segundo orden. Podemos escribir: x(k+1)=f(x(k),r(k)) (7) y c(k)=g(x(k),r(k)) (8) Las funciones no lineales son lo suficientemente lisas para poder distinguirlas y expresarlas en expansiones de series de taylor. Entonces después de ciertas manipulaciones y aproximaciones, cuyos detalles están disponibles en los textos, llegamos a la ecuación de linearizacion: X(k)=Ax(k)-Br(k) (9) y c(k)=Cx(k)-Dr(k) (10) Donde A, B, C y D son llamadas matrices de Jacobi. Ellas consisten de derivadas parciales las cuales toman la forma: ∂f1 ∂x A= 1 ∂f1 ∂x1 ∂f1 ∂f1 ∂ ∂g ∂x2 ; B = r ; C = f ∂ ∂f 2 2 ∂x1 ∂ r ∂x2 ∂g ∂g ; D = ∂x2 ∂r Se utiliza el comando DLQE de Matlab para obtener la solución de la ecuación de Ricatti de orden 2, la ganancia llamada de Kalman por ser obtenida con el filtro estacionario de Kalman discreto siendo de orden 2*1 permite actualizar las variables del observador. Para obtener la ganancia: F=DLQE(GE,HE,CE,Q,R) (12) Donde: GE=[ 0 1; -0.6246 1.6246], HE=[0;1], Q=0.01, R=0.04. Obteniendo: Kb(0)=1.16, Kb(1))=1.16. Obteniéndose además la solución de la ecuación de Ricatti que se usaron en el programa cmp1.cpp. Diseño del sistema regulador lineal cuadrático y discreto Se utiliza el comando DLQR de Matlab para obtener la solución de la ecuación de Ricatti de orden 3, la ganancia llamada de control que se obtiene con realimentación que reduce al mínimo la función del costo sujeta a la ecuación de diferencias. (11) Para obtener los datos: [K, S, E] = DLQR(G, H, Q, R) (13) Las cuatro matrices necesitan ser evaluadas en puntos de funcionamiento especifico que sé utilizan como puntos estacionarios, para una entrada de información x(k+1)=x(k). Entonces la naturaleza del sistema, en la vecindad de los puntos estacionarios, es descrita muy aproximadamente por las ecuaciones linealizadas. Utilizamos igual notación para las ecuaciones lineales que las no lineales. Obteniendo: K(0)=-0.5211, K(1)=1.3371, K(2)=- 0.5137, además de la solución de Ricatti que se usan en el programa cmp1.cpp. Algoritmos mínimos cuadrados recursivos Implementación Para diseñar un controlador dinámico, un modelo matemático que describe él cambió si lo hay debe ser implementado. Es posible obtener nuevos parámetros de la planta conocidos los datos previos de entrada y salida. Recogidos los datos de entrada y salida del sistema siso dinámico se procede a la ejecución del algoritmo, así se tienen los espesores de los coeficientes dinámicos del sistema nos determinan mejor las características de tiempo real de la planta pudiendo ser usados para el control. Para poder observar la señal de control más la señal de ofsset de 2.3 voltios DC, se implemento el circuito de la figura 4. Que esta constituido por un convertidor digital a analógico de 8 bits que con ayuda de amplificadores convierte la señal digital sintetizada de 8 bits del puerto b del DSP que lleva la información de la señal de control en análoga sumándole además 2.45 voltios y que debe ir al generador PWM que alimenta al motor DC, el DSP es excelente para mostrar la señal que se obtiene en un osciloscopio digital. El resultado es esperado 398 Donde: G=[0 1 0;-0.6246 1.6246 0; -0.041 –0.049 1], H=[0,1;0], Q=0.1, R=0.05. Memorias - XVII CONIMERA por la proporción que guardan los números en 8 bits con los originales en decimales obtenidos por calculo, inicialmente se utilizo un programa que escribía los valores de la señal de control en el puerto paralelo del DSP y luego a la señal análoga obtenida se le agregaba la señal de offset de 2.3 voltios mas 0.15 voltios, luego en otra prueba el programa sec.asm calcula mediante programa en cada tiempo de discretización, el valor cargado en el contador del timer se ajusta si es necesa sario para cumplir con el tiempo de discretizacion o lo que es lo mismo el tiempo total de la excursión. y que el sistema con etapa RLS utilizada en el programa en C de [8] no sea la mas adecuada, pues los parámetros del sistema casi no varían en esta fase inicial dicha etapa que nos brinda los nuevos parámetros del sistema se hace con ella más difícil el trabajo de obtener una señal estabilizada. Además la utilización de masa como una esfera de 45grs. agregada a la varilla fue posible con ligeras variaciones de los datos ajustándose el sistema a estas nuevas condiciones archivo comp2.cpp. 1.- Posicion (r(t)=0.35+0.435398*t, t<1.0 r(t)=0.785398, 20. >t >=1. ) Masa de la varilla 63.095grs. Programa sin etapa RLS pero con restricciones de salida (comp1.cpp). referencia(r) control (u) 0.8 0.55 0.75 0.7 0.5 0.45 0.65 0.4 0.6 posición(y) error (e) 0.8 0.35 0.7 0.3 0.6 0.25 0.5 0.2 e(t) 0.4 u(t) r(t) 0.55 y(t) 0.35 0.3 0.5 0.45 0.4 0.35 0.3 0 10 20 t 0.25 0.2 0.15 0.1 0 10 20 t 0.15 0.3 0.2 0.1 0 0 10 20 t 0.1 0.05 0 0 10 20 t Fig5.- Control de posición de 45°. Fig.4.- Circuito implementado. Resultados Los datos obtenidos inicialmente del Programa en C eran inestables se tuvo que dedicar tiempo a obtener la estabilidad para avanzar, en las deducciones se logro un control de posición estable para 20 segundos con el programa adecuado para la experiencia de usar el y las dificultades que ello conlleva. A continuación se tiene las gráficas que muestran los resultados que permiten comprobar que es posible utilizar DSP En esta figura el control de posición de referencia de 45° donde se elimino el sobreimpulso inicial, el programa no tiene etapa RLS pero tiene restricciones de salida, posterior al programa que también tenía restricciones de entrada, la estabilidad del proceso manifiesta que se puede implementar y que tiene robustez. 2.- Posición (r(t)=0.35+0.435398*t, t<1.0 r(t) = 0.785398, 20.>t>=1.0) Masa de la varilla 63.095grs. Programa con etapa de RLS y restricciones de salida. (adaro3.cpp). 399 Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica 0.75 0.5 0.7 0.65 0.4 r(t) u(t) 0.6 0.55 0.3 0.5 0.2 0.45 0.4 0.1 0.35 0.3 0 10 20 t 0 0 10 20 t posición(y) 0.8 0.4 0.7 0.3 0.6 0.2 0.5 0.1 0.4 error (e) e(t) control (u) 0.6 y(t) referencia (r) 0.8 0 0.3 -0.1 0.2 -0.2 0.1 -0.3 0 0 10 20 t -0.4 0 10 20 t Fig6.- Control de posición con etapa RLS. La figura muestra el control de posición de 45º, con la referencia que se indica, es sistema se estabiliza rápidamente, con la utilización de restricciones de salida más elaboradas que el caso anterior, pone de manifiesto la robustez de la planta, es muy parecida a la anterior, los valores que presenta también son asimilables por el DSP. Programa implementado (sec.asm) include ‘ycomp1.asm’ tcsr tcr pbc pbddr pbd pll bcr ipr equ equ equ equ equ equ equ equ $ffde $ffdf $ffe0 $ffe2 $ffe4 $fffd $fffe $ffff org y:$40 dc $000000,$000000,$000000 org jmp org movep movep movep movep movep movec movep andi move movep 400 P:$00 $0040 P:$0040 #$00,x:bcr #$000000,x:pbc #$261009,x:pll ; #$000fff,x:pbddr #$000012,x:tcsr #$0300,sr #$010000,x:ipr #$cf,mr #$900,r4 #>$f4240,x:tcr begin move move move move move sub jset move neg move move mpy lsl asr move move clr move move mac move mac neg move add move x_0 move move add move x_1 move move add move z move move sub move u clr move move mac move move mac move move mpy asr move move mac neg move move #$900,r3 #$1900,r5 y:(r3)+,x0 #$a90,a r3,y0 y0,a #00,sr,* x0,a a a,x0 #.01,y0 x0,y0,a a a a,y:>$0043 ;y1/100 #$40,r1 b y:(r1)+,y0 #$053f7d,x0 x0,y0,b y:(r1)+,y0 #.0479,x0 ;c(1)*10*x(1) x0,y0,b b b,x0 x0,a a,y:>$0044 y:>$0040,a y:>$0044,x0 ;rr x0,a a,y:>$0040 y:>$0041,a y:>$044,x0 ;rr x0,a a,y:>$0041 ;x(1) y:>$042,a y:>$043,y0 y0,a a,y:>$042 a y:$40,x0 ;x(0) #-0.5179,y0 x0,y0,a y:$42,x0 ;z #-.5128,y0 x0,y0,a y:$41,x0 ;x(1)/100 #>$00a,y0 x0,y0,b b #>$113a93,x0 b0,y0 x0,y0,a a ; a1,y:$45 a,x0 Memorias - XVII CONIMERA mpy x0,#16,a move a,x0 move #>$064,y0 mpy x0,y0,b asr b move b0,y:(r5); in_1 jsr xm1 jclr #07,x:tcsr,* jmp in_1 move y:$41,x0 move x0,y:$300 move #-.6246,y0 move y:$40,x0 ;x(0) mac x0,y0,a move y:$41,x0 ;*x(1) move #>$00a,y0 mpy x0,y0,b asr b move b0,y0 move #0.16246,x0 mac x0,y0,a move a1,y:$41 ;nuevo x(1)/100 move y:$300,x0 move x0,y:$40 ;nuevo x(0)/100 jmp begin xm1 movep y:(r5),x:pbd bset #$00,x:tcsr rts Conclusiones Este programa cuenta con una subrutina de espera a interrupción xm1 para tener datos en el puerto paralelo (se planteara usar sci o ssi con timer) la cual fue probada con datos de comp1.cpp la cual obtiene la señal de control u, además el programa tiene que calcular u lo cual es ligeramente menor que los resultados del programa en C, luego en ensamblador DSP se optimiza el valor de u para igualar condiciones con el programa en C se tendría que agregar un valor adecuado pero esto nos indica que el sistema en DSP es mejor. Finalmente se pudo hacer pruebas de seguimiento para periodos de 40 segundos con posiciones de 45º a 30º que fueron estables por los resultados de estabilidad anteriores para una ampliación a 100 seg. De tiempo con posiciones de 45º y 30º intercalándose cada 20 segundos, sólo él implementado sin etapa RLS y restricciones de salida fue posible de estabilizar, este sistema preparado para DSP también se pudo probar con carga de una esfera de 45 gramos. Estos sistemas pueden tener etapa RLS y se debe seleccionar una adecuada pues ella depende únicamente de la entrada y salida anterior. Este programa incluye todos los datos a partir de y: $900 del programa ubcomp1.asm que tiene los datos de la señal de control aproximada utilizando los 8 bits menos significativos que irán al dac 0808 del circuito implementado y de allí hacia el generador PWM. En esta investigación el objetivo fundamental es definir la posición y controlar la velocidad del motor de excitación independiente, para lo cual presentamos un programa que mejora el propuesto en [8]. Nuestro programa permite operar directamente en el ensamblador del DSP. Con este procesador de señales gozamos del proceso de convolución que le da a los datos que maneja y además se ha utilizado restricciones de salida para estabilizar la respuesta de posición siendo las restricciones más elaboradas para el caso que utilizamos etapa RLS. Además queda demostrado que se pueden hacer las simplificaciones necesarias sobre todo si se quiere trabajar con DSP en el caso del uso de comandos de Matlab. Los resultados numéricos caen dentro del dominio fraccionario del DSP lo que abre una gama de posibilidades para el manejo y mejora de algoritmos de control. Además se comprobó que la etapa RLS utilizada quizás no sea la más adecuada como se contemplan en la referencia indicada por Motorola fabricante del DSP utilizado en [12] teniéndose que seleccionar entre varios algoritmos RLS. El sistema no tiene complicaciones para uso de puertos paralelos de comunicación a manera de profundizar el problema se puede utilizar puertos en serie SCI y SSI del DSP nosotros intentaremos manejarlos con las facilidades del timer del DSP. 401