Sistemes propulsius
Anuncio

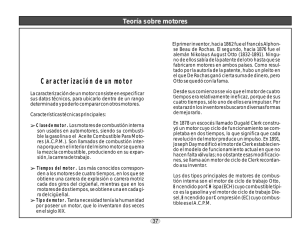
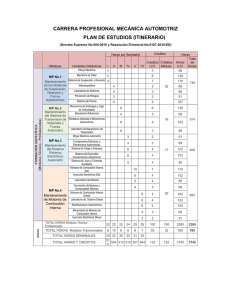
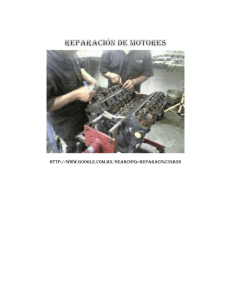
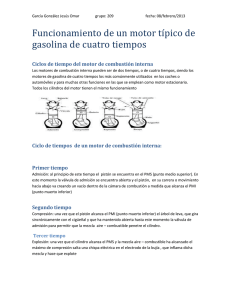
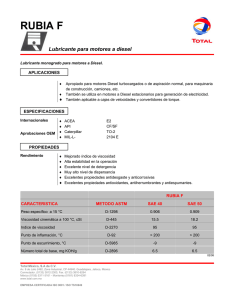
Enginyeria Aeronàutica Sistemes propulsius Ref : MTZ / April 2011 / Vol 72 Módulo 4 Motores alternativos de combustión interna Tema 10 Fundamentos Manel Quera Ramon Carreras Laboratori de Motors Tèrmics i Automòbils Dep. Màquines i Motors Tèrmics ETSEIA Terrassa MACI / Manel Quera, Ramon Carreras -2- ÍNDICE Motores alternativos de combustión interna. Fundamentos. 1. Introducción 2. Principio operative del motor Otto 2.1. Ciclo de trabajo del motor Otto 4T ( 4 tiempos ) 2.2. Ciclo de trabajo del motor Otto 2T ( 2 tiempos ) 3. Principio operative del motor Diesel 3.1. Ciclo de trabajo del motor Diesel 4T ( 4 tiempos ) 3.2. Ciclo de trabajo del motor Diesel 2T ( 2 tiempos ) 4. Resumen comparativo del motor Otto – motor Diesel 5. Características comunes de los MACI 5.1. Características dimensionales fundamentales 5.2. Características constructivas fundamentales 5.3. Características operativas 5.4. Características efectivas 6. Curvas características de un motor 7. Problemas 7.1. Balance de energía de un MACI ( Base PCI ) 7.2. Motor Otto 4T Bibliografía R. Stone. Introduction to Internal Combustion Engines. MacMillan Education Ltd. London (1985) J.B. Heywood. Internal Combustion Engine Fundamentals. McGraw-Hill (1988). R. Carreras, A .Comas, A. Calvo. Motores de Combustión Interna. Fundamentos. Departament de Màquines i Motors Tèrmics (ETSEIT). Edicions UPC (1993). D. Giacosa. Motores endotérmicos. Hoepli – Editorial Centífico-Médica. Barcelona. (1970) D. Cabronero. Motores de combustión interna y turbinas de gas. (1989) MTZ. Springer Automotive Media. Munich Revista mensual sobre los últimos avances tecnológicos en MACI de la industria alemana MACI / Manel Quera, Ramon Carreras -3- 1.- Introducción Los motores de combustión interna más utilizados actualmente, que operan según el principio de las máquinas volumétricas, pueden clasificarse en dos grandes grupos: Motores alternativos de combustión interna Motores rotativos de combustión interna En la Tabla 1 se incluyen las principales variantes de dicho tipos de motores. MOTORES TÉRMICOS DE COMBUSTIÓN INTERNA Motores Alternativos de Combustión Interna ( MACI ) Motores Rotativos de Combustión Interna ( MRCI ) Versión de motor Otto Diesel Wankel Tipo de ciclo 2T 4T 4T 2T De menor a mayor potencia Tipo de motor térmico 4T 2T : 2 Tiempos / 4T : 4 Tiempos Tabla 1 Principales tipos de motores de combustión interna Los motores de uso más extendido son los motores alternativos de dos o de cuatro tiempos en sus versiones Otto ( encendido por chispa ) y Diesel ( encendido por compresión ) No tan sólo son los típicos motores utilizados en automoción y en accionamiento de maquinaria para obras y servicios, sino que también los hallamos mayoritariamente en la propulsión naval y en propulsión aérea ligera y, en competencia con otros motores, en plantas generadoras eléctricas, en tracción ferroviaria y en el accionamiento de máquinas de muy diversa índole. La utilización del motor rotativo Wankel está restringido actualmente, entre otras aplicaciones, como motor de propulsión de determinados modelos de automóviles de un fabricante japonés ( Mazda ), siendo su presencia minoritaria, frente a los MACI convencionales ( Otto o Diesel ). Históricamente los MACI se desarrollaron, en una primera fase, para aplicaciones estacionarias (accionamiento de maquinaria) y transporte terrestre. Posteriormente se amplió su campo de utilización para transporte marítimo y propulsión aérea. Por dicho motivo gran parte de sus fundamentos y tecnología es común a la mayoría de aplicaciones. De cara a la presentación de los MACI para su aplicación en propulsión aeronáutica, se ha estructurado el texto en cuatro temas diferenciados : Tema 10 : MACI. Fundamentos Capítulo dedicado a principio operativo del motor Otto y del motor Diesel (en sus versiones 2T y 4T), principales características dimensionales, constructivas y operativas.Determinación de prestaciones y rendimiento de MACI (características efectivas), a partir de los resultados experimentales obtenidos en bancos de ensayo (curvas características de motores). MACI / Manel Quera, Ramon Carreras -4- Tema 11 : MACI. Tecnología Capítulo dedicado a las característica tecnológicas más destacbles de cada tipo de motor (Otto 4T, Diesel 4T), centradas en : regulación de par, sistemas de alimentación de combustible y sobrealimentación. Tema 12 : El motor Otto aeronáutico Capítulo dedicado a las principales características constructivas y operativas de los motores Otto, utilizados en propulsión aeronáutica, fundamentalmente en el campo de la aviación ligera. Es el tipo de motor más utilizado actualmente. Tema 13 : El motor Diesel aeronáutico Capítulo dedicado a las principales características constructivas y operativas de los motores Diesel, utilizados en propulsión aeronáutica. Se presenta un breve resumen histórico, desde los primeros motores Diesel aeronáuticos, hasta los prototipos más recientes. Este tipo de motor, aunque tiene un nivel de utilización en propulsión aeronáutica mucho menor que el motor Otto, presenta unas interesantes perspectivas futuras en aviación ligera, debido a los destacados avances tecnológicos conseguidos en sus aplicaciones terrestres, que pueden ser utilizados para el diseño de nuevos motores Diesel aeronáuticos. 2.- Principio operativo del motor Otto 2.1.- Ciclo de trabajo del motor Otto 4T ( 4 Tiempos ) En la Figura 1 se presenta un esquema simplificado de un motor monocilíndrico Otto 4T, que está constituído por tres partes o bloques constructivos básicos : Culata Bloque Cárter Bujía Válvula admisión Mezcla aire-gasolina ( Entrada ) Válvula escape Gases combustión ( Salida ) Culata PMS Cilindro s = carrera Pistón o émbolo PMI Bloque del motor biela Cigueñal ( eje motor ) manivela Cárter Figura 1 : Esquema básico constructivo de un motor Otto 4T MACI / Manel Quera, Ramon Carreras -5- En la culata o parte superior del motor se alojan los elementos que permiten regular la operación del motor : Válvula de admisión Permite la entrada de la mezcla aire-gasolina al interior del cilindro del motor Válvula de escape Permite la salida de los gases de combustión del cilindro una vez finalizado el ciclo de trabajo Bujía Es la responsable de provocar la ignición o inicio del proceso de combustión de la mezcla airegasolina ( encendido por chispa ) El bloque del motor contiene los elementos que permiten generar el trabajo mecánico obtenido en el motor por expansión del fluido de trabajo : Cilindro Pistón Cigüeñal o eje motor Durante el ciclo de trabajo del motor ( que más adelante se describe ) el pistón realiza cuatro carreras entre el PMS ( Punto Muerto Superior ) y el PMI ( Punto Muerto Inferior ), generando un movimiento lineal alternativo, que es convertido en movimiento rotativo, mediante un mecanismo tipo biela-manivela. Al final de este proceso se obtiene un par motor ( energía mecánica rotativa ) sobre el cigüeñal, como forma de energía más fácilmente explotable o utilizable. El Cárter es la tapa que permite sellar el motor en su parte inferior y contiene el aceite de lubricación, junto con la bomba de circulación e inyección de aceite ( no indicada en la figura ). Motor Otto 4T : Descripción del ciclo de trabajo El ciclo de trabajo del motor Otto 4T consta de cuatro etapas ( denominadas también 4 tiempos ), que corresponden a las cuatro carreras que debe realizar el pistón para completar dicho ciclo de trabajo (Figura 2 : 4 carreras = 2 revoluciones del cigüeñal ). 1. Admisión El pistón descendente aspira la mezcla gasolina-aire, a través de la válvula de admisión abierta, llenando todo el cilindro de dicha mezcla, hasta el PMI. La preparación de dicha mezcla se ha realizado previamente, en el colector de aspiración del motor, mediante un proceso (carburación o inyección), en el que se inyecta la gasolina líquida en el flujo de aire, que va camino del cilindro. Debido a la alta volatilidad de la gasolina, ésta se evapora muy rápidamente, por lo que puede considerarse que la mezcla homogénea aire-gasolina que penetra en el cilindro está en fase gas. 2. Compresión Con ambas válvulas cerradas (admisión y escape), el pistón ascendente comprime la mezcla. Cerca del PMS la bujía genera una chispa que inciará el proceso de combustión ( encendido por chispa ). 3. Expansión La mezcla aire-gasolina sufre un rápido proceso de combustión que genera unos gases de combustión a elevada presión y temperatura, que empujan el pistón descendente hacia el PMI (proceso de expansión) 4. Escape Se abre la válvula de escape y el pistón ascendente expulsa hacia el exterior los gases quemados. MACI / Manel Quera, Ramon Carreras 1 - Admisión -6- 2- Compresión 3- Expansión 4- Escape Figura 2 : Ciclo de trabajo del motor Otto 4T 2.2.- Ciclo de trabajo del motor Otto 2T ( 2 Tiempos ) El motor Otto 2T presenta unas diferencias constructivas significativas, respecto al motor Otto 4T, tal como se indica en la Figura 3 adjunta : No dispone de válvulas de admisión y escape, realizando la admisión de la mezcla aire-gasolina y el escape de los gases de combustión a través de unas lumbreras mecanizadas en el cilindro (lumbrera de admisión y lumbrera de escape) El bloque del motor y el cárter forman un conjunto constructivo que está comunicado por un canal interior, denominado lumbrera de transferencia o de carga Dispone de la bujía de encendido en culata, de foma similar al motor Otto 4T Figura 3 : Esquema básico constructivo de un motor Otto 2T ( tipo 3 lumbreras ) MACI / Manel Quera, Ramon Carreras -7- Motor Otto 2T : Descripción del ciclo de trabajo A nivel operativo, el motor Otto 2T realiza las cuatro etapas del ciclo de trabajo del motor Otto 4T, pero utilizando solamente dos carreras ( 1 revolución del eje o cigüeñal ) : Carrera descendente : Expansión y escape Carrera ascendente : Admisión y compresión En la Figura 4 se resume el ciclo de trabajo de dicho motor. 1. Carrera descendente : Expansión y escape La carrera descendente del pistón puede dividirse en cuatro tramos, en cada uno de los cuales se realizan diferentes procesos, correspondientes a las cuatro etapas del ciclo. En el primer tramo, el pistón situado en el PMS inicia la carrera descendente de expansión de los gases calientes (parte superior del cilindro), mientras en la cámara inferior del cilindro (cárter) se está produciendo simultáneamente la entrada de la mezcla aire-gasolina, a través de la lumbrera de admisión. En el segundo tramo de carrera, el pistón cierra el paso de la mezcla aire-combustible a través de la lumbrera admisión y realiza la precompresión de la mezcla confinada en el cárter. En el tercer tramo de carrera, el pistón descubre la lumbrera de escape y se inicia la fase de expulsión de los gases de combustión. En el cuarto y último tramo de carrera, el pistón descubre la lumbrera de carga, iniciando el paso o transferencia de la mezcla aire-combustible desde el cárter al cilindro, mientras simultáneamente sigue el proceso de escape o barrido de los gases de combustión. 2. Carrera ascendente : Admisión y compresión La carrera ascendente del pistón, desde el PMI al PMS, puede dividirse en tres tramos. En el primer tramo, el pistón cierra la lumbrera de transferencia, mientras sigue el proceso de expulsión de los gases de combustión, a través de la lumbrera de escape. En el segundo tramo, el pistón cierra la lumbrera de escape. En el tercer tramo el pistón realiza la compresión final de la mezcla aire-combustible, confinada en el cilindro, hasta el PMS. Poco antes del PMS la bujía genera una chispa que inciará el proceso de combustión. 1 – Carrera descendente : Expansión y escape 2 – Carrera ascendente : Admisión y compresión Figura 4 : Ciclo de trabajo del motor Otto 2T MACI / Manel Quera, Ramon Carreras -8- Resumen comparativo motor Otto 4T – motor Otto 2T El motor Otto 2T realiza las mismas cuatro etapas del ciclo de trabajo que el motor Otto 4T, pero utilizando solamente dos carreras. Esto implica que, a igualdad de tamaño de motor ( caracterizado por la cilindrada, tal como más adelante se define ) y para el mismo régimen de trabajo ( RPM = revoluciones por minuto del cigüeñal o eje motor ), un motor Otto 2T permite obtener teóricamente el doble de potencia efectiva que un motor Otto 4T, aunque a costa evidentemente de un mayor consumo de combustible. Esta constatación puede a llegar a deducirse conceptualmente, de un forma simple, a partir del trabajo efectivo generado por cada ciclo de trabajo del motor ( We ). En un motor 4T operando a una determinado régimen de trabajo ( RPM ), la potencia efectiva generada puede calcularse como : Pe ( W ) N revol 4 carreras 1 ciclo We ( J ) 1min min 2 revol 4 carreras 1 ciclo 60 s Pe We ·N 120 En un motor 2T de igual cilindrada y operando al mismo régimen de trabajo, el trabajo generado por ciclo será teóricamente igual ( We ), pero la potencia efectiva generada sería el doble : Pe ( W ) N revol 2 carreras 1 ciclo We ( J ) 1min min 1revol 2 carreras 1 ciclo 60 s Pe We ·N 60 En la realidad esto no es exactamente así, ya que, entre otros factores, la calidad del ciclo en un motor 2T es inferior al de un motor 4T, debido al diferente proceso de renovación de carga entre ambos tipos de motores. En el motor 4T la fase de admisión de mezcla aire-combustible ( primera carrera ) está claramente diferenciada de la fase de escape o expulsión de los gases quemados ( cuarta carrera ), pudiendo conseguir una buena renovación de la carga del fluido de trabajo en el cilindro. En el motor 2T la fase de admisión de mezcla aire-combustible en el cilindro y la fase de escape se realizan simultáneamente durante una parte del ciclo, situación que conduce a pérdidas de gas fresco (mezcla aire-combustible) a través del escape y a la dilución del gas fresco, durante el proceso de compresión, por la presencia de gases quemados, que no han sido completamente evacuados del clilindro al final del ciclo de admisión. Ello conduce a una peor renovación de carga, peor proceso de combustión y menor trabajo generado por ciclo ( We ). 3.- Principio operativo del motor Diesel 3.1.- Ciclo de trabajo del motor Diesel 4T ( 4 Tiempos ) El motor Diesel 4T es muy similar en determinados aspectos al motor Otto 4T, utilizando cuatro carreras para completar el ciclo de trabajo y estando constituido, desde el punto de vista constructivo, asimismo por tres partes : Culata Bloque Cárter MACI / Manel Quera, Ramon Carreras -9- La diferencia más significativa es que el motor Diesel no dispone de bujía de encendido en culata. En su lugar se coloca un inyector que permite pulverizar e introducir el combustible líquido (gasoil) directamente en el interior del cilindro. Dicho combustible en contacto con el aire caliente (previamente comprimido) inciará el proceso de combustión por autoignición térmica Motor Diesel 4T : Descripción del ciclo de trabajo Aunque el motor Diesel comparte el mismo número de etapas que el motor Otto, existen diferencias significativas en el funcionamiento del ciclo ( fundamentalmente en la etapas 1 y 2 ), que se resumen en la Figura 5. 1. Admisión El pistón descendente aspira solamente aire, a través de la válvula de admisión abierta, llenando todo el cilindro, hasta el PMI. Compresión Con ambas válvulas cerradas (admisión y escape), el pistón ascendente comprime el aire. Cerca del PMS, el inyector introduce en el cilindro el combustible líquido atomizado, que, al entrar en contacto con una masa de aire a elevada presión y temperatura, inicia un proceso de autoignición térmica (encendido por compresión). 2. Expansión Los gases de combustión a elevada presión y temperatura empujan el pistón descendente hacia el PMI (proceso de expansión) 3. Escape Se abre la válvula de escape y el pistón ascendente expulsa hacia el exterior los gases quemados. 1 - Admisión 2- Compresión 3- Expansión Figura 5 : Ciclo de trabajo del motor Diesel 4T 4- Escape MACI / Manel Quera, Ramon Carreras - 10 - 3.2.- Ciclo de trabajo del motor Diesel 2T ( 2 Tiempos ) El motor Diesel 2T presenta algunas diferencias constructivas, respecto al motor Diesel 4T, tal como se indica en la Figura 6 adjunta. Dicho motor presenta las siguientes características constructivas y operativas básicas: No dispone de válvulas de admisión y escape, realizando la admisión de aire y el escape de los gases de combustión a través de unas lumbreras mecanizadas en el cilindro. Realiza la admisión de aire a través de un compresor ( motor sobrealimentado ) Dispone de un inyector de combustible en culata para introducir el combustible atomizado en el interior del cilindro ( similar al Diesel 4T ) Inyector de combustible Aire Filtro Lumbrera escape ( Exhaust port ) Compresor Lumbrera admisión ( Inlet port ) Figura 6 : Esquema constructivo de motor Diesel 2T De forma similar al motor Otto 2T, el motor Diesel 2T realiza las cuatro etapas del ciclo de trabajo, utilizando solamente dos carreras ( 1 revolución del eje o cigüeñal ) : Carrera ascendente : Admisión y compresión Carrera descendente : Expansión y escape En las Figuras 7 y 8 adjuntas, se resume el ciclo de trabajo de dicho motor. MACI / Manel Quera, Ramon Carreras Figura 7 : Motor Diesel 2T / Carrera ascendente : Admisión y compresión Figura 8 : Motor Diesel 2T / Carrera descendente : Expansión y escape Ref : D.Cabronero. Motores de Combustión Interna y Turbinas de Gas - 11 - MACI / Manel Quera, Ramon Carreras - 12 - Resumen comparativo motor Diesel 4T – motor Diesel 2T Si realizamos un anàlisis comparativo entre Diesel 2T y 4T, pueden deducirse conclusiones análogas a las comentadas anteriormente entre el motor Otto 2T y 4T. El motor Diesel 2T realiza las mismas cuatro etapas del ciclo de trabajo que el motor Diesel 4T, pero utilizando solamente dos carreras. En consecuencia, a igualdad de tamaño de motor (cilindrada) y de régimen de trabajo ( RPM del cigüeñal o eje motor ), un motor Diesel 2T permite obtener teóricamente el doble de potencia efectiva que un motor Diesel 4T. Sin embargo el motor Diesel 2T realiza un mejor proceso de renovación de carga que el motor Otto 2T. En la etapa de admisión solamente penetra aire en el cilindro, por lo que las eventuales pérdidas de gas fresco por la lumbrera de escape no suponen una pérdida de combustible ( como ocurre con el motor Otto 2T ), si no simplemente de aire comprimido que favorece el barrido o expulsión de los gases quemados. Por dicho motivo, el motor Diesel 2T presenta un menor consumo de combustible (menores pérdidas) y mejor nivel de calidad de combustión y rendimiento que el motor Otto 2T. Estas buenas prestaciones del Diesel 2T le permiten competir incluso con el Diesel 4T en determinadas aplicaciones. A igualdad de régimen de trabajo (RPM) presenta mayores potencias y similares rendimientos o incluso superiores al Diesel 4T, por lo que es un motor utilizado en propulsión naval ( grandes motores Diesel lentos ). 4.- Resumen comparativo motor Otto – motor Diesel Los motores Otto y Diesel han sufrido una serie de evoluciones a lo largo de su historia con el objetivo de adaptarse a las diferentes aplicaciones a los que van destinados, así como al nivel creciente de exigencia en materia de eficiencia energética ( incrementar rendimiento y reducir consumo de combustible ) y en materia de impacto ambiental ( minimizar emisión de contaminantes ). En al Tabla 2 se presenta un resumen comparativo de las principales características del motor Otto y Diesel, como introducción al desarrollo de la temática en apartados posteriores. MACI / Manel Quera, Ramon Carreras - 13 - Variable Motor Otto Motor Diesel Tipo de ciclo 2T ( pequeña cilindrada ) / 4T ( gran cilindrada ) 4T ( pequeña cilindrada ) / 2T ( gran cilindrada ) Gasolina ( usual ) Gasoil ( usual ) Combustible Otros combustibles : GLP, gas natural, metanol Otros combustibles : fuel-oil, biodiesel H2, bioetanol Sistema encendido Provocado por chispa ( bujía ) Cuantitativa Cualitativa Regulación Se regula la cantidad de mezcla aire-gasolina Se regula la cantidad de combustible introducida en el motor inyectada en el cilindro Tipo de combustión Homogénea Hetereogénea Cualidad de la mezcla aire-combustible = 1 ( mezcla estequiométrica ) > 1 ( exceso de aire ) Carburación Inyección indirecta ( antecámara ) Sistema dosificación de combustible Inyección indirecta ( colector ): unipunto / multipunto Inyección directa ( cilindro ) ( Evolución histórica ) Inyección directa ( cilindro ) Sobrealimentación del motor Atmosférico ( usual ), sobrealimentado Atmosférico, sobrealimentado ( usual ) Relación compresión : = Vmax / Vmin Inyección indirecta ( 2 Válvulas ) : 8- 10 Inyección indirecta : 18- 24 Vmax = Volumen cilindro en PMI Inyección indirecta ( 4 Válvulas ) : 9- 11 Inyección directa : 17 -21 Vmin = Volumen cilindro en PMS Inyección directa ( 4 Válvulas ) : 11 - 14 Rango de potencia efectiva 1 - 500 kW 10 - 40.000 kW Rendimiento 25 - 35 % 35 - 51 % Aplicaciones Actividad I + D Autoignición térmica ( por compresión ) Transporte turismos ( motocicleta, automóvil ) Transporte turismos ( automóvil ) Transporte marítimo ( peq potencia ) Transporte industrial por carretera, marítimo, y ferroviario ( locomotoras ) Propulsión aeronáutica (aviación ligera) Estacionario : Accionamiento maquinaria pequeña Estacionario : Grupos electrógenos, potencia (grupo electrógeno,bombas,…) cogeneración ( mediana y gran potencia ) Minimizar consumos y reducir emisiones contaminantes Reducir emisiones contaminantes ( NOx ) Control electrónico Control electrónico Mejora ID-sobrealimentación Desarrollo inyección directa + sobrealimentación Utilización de combustibles alternativos : biodiesel Utilización de combustibles alternativos : bioetanol, hidrógeno,… Tabla 2 : Características constructivas y operativas básicas, principales aplicaciones y estado de desarrollo de los MACI ( Otto y Diesel ) MACI / Manel Quera, Ramon Carreras - 14 - 5.- Características comunes de los MACI La solución de convertir el trabajo de expansión de los gases en par motor en un eje, aprovechando el sistema émbolo-cilindro-biela-manivela, la hallamos en motores de combustión interna que operan con distintos procedimientos: Otto o Diesel, 2 tiempos, 4 tiempos... Sin embargo existen en ellos algunas características comunes que resulta ventajoso tratar unitariamente. Las características del motor se pueden dar desde distintos puntos de vista. De estas características podemos citar: características dimensionales características constructivas características operativas características efectivas Se analizarán a continuación por separado. 5.1.- Características dimensionales fundamentales En la Figura 9 se esquematiza el mecanismo básico de la mayoría de MACI: émbolo cilindro-bielamanivela, y junto a ella se resumen algunas de las características dimensionales fundamentales. Diámetro V max = VPMI Vmin = VPMS d PMS PMS Carrera s = 2r PMI PMS Cilindrada Vd Pistón o émbolo PMI l PMI l biela r r manivela eje cigueñal Vd = Cilindrada unitaria = Vmax - Vmin = d2 s 4 = Relación volumétrica de compresión = Vmax Vmin = Vd + Vmin Vmin = Relación manivela-biela = r / l = Relación carrera-diámetro = s / d Fig. 9 : Principales características dimensionales de un MACI MACI / Manel Quera, Ramon Carreras - 15 - Referencias posicionales PMS, PMI ( Punto Muerto Superior y Punto Muerto Inferior ) Como su nombre indica, estas referencias designan las posiciones extremas del recorrido del émbolo: PMS : Posición del émbolo al final de la carrera de compresión y de la carrera de escape PMI : Posición del émbolo al final de la carrera de aspiración y de la carrera de expansión En el PMI el volumen del cilindro es máximo ( Vmax ) y en el PMS el volumen del cilindro es mínimo (Vmin ). Es decir en un motor 4T, el pistón o émbolo pasará dos veces por el PMS y dos veces por el PMI. Referencias lineales Diámetro ( d ) y carrera ( s ) La dimensión lineal de referencia más importante en los motores alternativos es el diámetro del cilindro ( d ). En los análisis dimensionales y en cuestiones de semejanza el diámetro del cilindro es la dimensión empleada para definir el tamaño de un motor. La carrera ( s ) representa la distancia entre el punto muerto superior ( PMS ) y el punto muerto inferior ( PMI ). Esta magnitud, junto con el diámetro del cilindro, define la cilindrada unitaria del motor. Longitud de biela ( l ) y radio de la manivela ( r ) La longitud de la biela ( l ) se mide del centro de la cabeza al centro del pie ( Figura. 10 ). El radio de manivela ( r ) corresponde al radio del codo del cigüeñal y su tamaño es la mitad de la carrera. s 2r (1) Pie r l Cabeza Cigüeñal Biela Fig. 10 : Biela y cigüeñal de un motor de tipo automoción MACI / Manel Quera, Ramon Carreras - 16 - Referencias volumétricas ( Figura 3 ) Cilindrada ( Vd ) y relación de compresión ( ) El Volumen mínimo o volumen de la cámara combustión corresponde al volumen interior del cilindro cuando el pistón se halla en el PMS ( Vmin = VPMS ). El Volumen máximo corresponderá al existente cuando el émbolo se halla en su PMI ( Vmax = VPMI ). La Cilindrada unitaria Vdu de un motor corresponde al volumen desplazado por el émbolo al moverse entre el PMS y el PMI y es una medida de la capacidad de aspiración del cilindro. Vdu d2 s 4 (2) La Cilindrada total Vd de un motor policilíndrico resulta de multiplicar la cilindrada unitaria por el número z de cilindros del motor. Vd Vdu z (3) La Relación volumétrica de compresión o relación de compresión ( e ) se define como la relación entre el volumen máximo y el volumen mínimo. Vmax VPMI Vmin VPMS (4) En todos los MACI el rendimiento ( ) aumenta si la relación de compresión aumenta. No obstante, la pendiente ( d/d) resulta cada vez menor, por lo que llega un momento a partir del cual carece de interés seguir aumentando la relación de compresión con la finalidad de aumentar el rendimiento. Los valores de la relación de compresión habituales en la actualidad dependen del tipo de proceso motor. En el motor Otto interesa que la relación de compresión, dentro de lo viable, sea lo mayor posible ya que ello conduce a mejores rendimientos. Sin embargo, su valor viene limitado por el fenómeno del picado ( autoignición térmica de la mezcla aire-gasolina en la etapa de compresión, antes del instante del encendido provocado por la chispa de la bujía ). La relación de compresión media usual de un motor Otto se situa aproximadamente en ≈ 10. La relación de compresión máxima depende del tipo de motor : Motor Otto ( inyección indirecta en colector ) : max≈ 11 Motor Otto ( inyección directa en cilindro ) : max≈ 14 El motor Diesel debe operar a mayores relaciones de compresión, ya que al final de la carrera de compresión, el aire debe alcanzar una temperatura suficientemente alta ( entre 500 y 700 ºC ) para facilitar la autoignición térmica del combustible ( gasóleo ), cuando sea inyectado en la cámara de combustión. Dicho nivel de temperaturas solamente son alcanzables si el aire es comprimido a una presión suficientemente alta ( elevada e ). A partir de un límite superior de relación de compresión ( e > 24 aprox ) no resulta interesante la construcción de un motor Diesel, ya que, entre otras razones, las altas presiones que alcanza el aire al final de la etapa de compresión requiere la construcción de un motor cada vez más robusto, caro y pesado. MACI / Manel Quera, Ramon Carreras - 17 - La relación de compresión media usual de un motor Diesel se situa aproximadamente en ≈ 20. La relación de compresión máxima depende del tipo de motor : Motor Diesel ( inyección indirecta en antecámara ) : max≈ 24 Motor Diesel ( inyección directa en cilindro ) : max≈ 21 Las condiciones operativas de los motores Diesel reales ( e ≈ 20 ) conducen a un rendimiento térmico usualmente superior al de los motores Otto, que operan a menores relaciones de compresión ( e ≈ 10 ) . Relaciones entre dimensiones lineales Carrera/diámetro ( ) Una de las características geométricas del cilindro es la relación entre la carrera del émbolo y el diámetro del cilindro : s d (5) En función de dicha relación, los motores pueden clasificarse como: Motor cuadrado : Aquel cuya carrera es igual al diámetro ( = 1 ) Motor alargado : Si s > d ( > 1 ) Motor supercuadrado : Si s < d ( < 1 ) El hecho de diseñar un cilindro motor más o menos cuadrado tiene una serie de consecuencias a veces contrapuestas. El diseño final será una solución de compromiso que satisfaga las diferentes especificaciones y sus prioridades. Al ser la velocidad media del émbolo uno de los criterios definitorios de las solicitaciones mecánicas del motor, para igual cilindrada e igual velocidad media del émbolo, la disminución de la carrera a base de aumentar el diámetro, permite operar a mayor rpm, con lo que se puede conseguir mayor potencia máxima. Correspondientemente: un diseño cuadrado, para igual rpm, operará a menores velocidades medias del émbolo. El aumento del diámetro relativo proporciona más espacio para ubicar las válvulas, por tanto mayor sección de paso y menor pérdida de carga lo que mejora la capacidad de aspiración o rendimiento volumétrico del motor. En cambio, si el motor es más alargado, su cámara de combustión es más compacta y permite una combustión más rápida en el motor Otto y resulta más adecuada para tolerar relaciones de compresión más elevadas sin picar. El análisis de algunas de las consecuencias derivadas de una modificación de la relación s/d pone de manifiesto que la elección correcta deberá basarse en el establecimiento de unas prioridades (consumo, potencia, emisiones de contaminantes...), ya sea en una experiencia previa y en extensos ensayos experimentales o bien en el uso de un buen modelo de simulación numérica completada con unos ensayos de prototipos (diseño orientado por ordenador). Los motores Otto suelen ser cuadrados o ligeramente alargados. El motor Diesel 4T suele ser bastante más alargado que el motor Otto, ya que el motor Diesel opera a mayores relaciones de compresión que el motor Otto. Los grandes motores Diesel de 2 tiempos presentan en la actualidad un diseño superalargado. MACI / Manel Quera, Ramon Carreras - 18 - Radio manivela / longitud biela ( La segunda relación dimensional fundamental es la relación entre el radio de manivela ( r ) y la longitud de biela ( l ) : siendo: r s l 2l (6) s = 2 r = carrera dels pistón Obsérvese que esta relación en principio (salvo interferencia entre los elementos) es independiente de la relación carrera/diámetro. 5.2.- Características constructivas fundamentales Tipos constructivos de los MACI Por razones de regularidad de marcha, equilibrado y también por razones económicas y de relación peso/potencia, es habitual el uso de más de un cilindro motor actuando sobre el mismo eje. Con ello tenemos, además del motor monocilíndrico, el bicilíndrico y en general, los motores policilíndricos. En los motores policilíndricos, las disposiciones de los cilindros pueden ser también variadas: en línea, en boxer ( línea con cilindros alternativamente abatidos a 180° ) en V, en W, en H en X, en ∆ y en estrella. Algunas de ellas aparecen en la Figura 11 basada en la norma DIN 1940. Figura 11 Principales formas constructivas de los motores alternativos de combustión interna, según norma DIN 1940 Motor con émbolo buzo Motor horizontal Motor en V y en líneas de V Motor con cruceta Motor suspendido Motor en W Motor de simple efecto Motor en línea Motor de varias estrellas Motor de doble efecto Motor de doble línea Motor en H y en líneas de H Motor (boxer) cilindros opuestos Motor en estrella Motor vertical MACI / Manel Quera, Ramon Carreras - 19 - La configuración final del motor también dependerá del tipo de solución adoptada en los sistemas de distribución ( válvulas, lumbreras,...), en los de refrigeración ( agua, aire ), en los de alimentación (carburación, inyección) y en los de encendido ( espontáneo, por chispa: magneto, inducción, condensador...). La unidad básica de los motores alternativos la constituye el cilindro unitario. Esta unidad no tan sólo sirve para el desarrollo de un nuevo motor sino también para configurar un motor policilíndrico que satisfaga las necesidades de potencia de una aplicación determinada. Por ello pasamos a analizar las características dimensionales, constructivas y de operación en función del cilindro unitario. Número y disposición de cilindros: influencia sobre peso y volumen del motor La intuición nos podría llevar a pensar que para aumentar la potencia de un motor bastaría con aumentar su cilindrada unitaria. Sin embargo, esta solución basada en aumentar las dimensiones de sus cilindros conlleva un deterioro de la relación peso/potencia del motor. Ello se debe al hecho de que en motores mecánicamente semejantes1, la masa del motor aumenta con d3 mientras que la potencia lo hace con d2. La solución al problema del aumento de la potencia de un motor pasa por ganarla, no sólo a base de aumentar las dimensiones del cilindro, sino aumentando el número de cilindros del motor. Es por ello que en motores industriales se han comercializado motores constituidos por hasta 40 cilindros en H y 48 cilindros en X; sin embargo, el máximo habitual práctico se sitúa en 24. La solución del motor policilíndrico no solamente conlleva evitar el empeoramiento de la relación potencia/peso, sino que permite disminuir el grado de irregularidad en la velocidad de giro del motor al poder operar los distintos cilindros en forma desfasada. Esta práctica permite también reducir la masa del volante de inercia que incorporan los motores, con el fin de regularizar su marcha y almacenar energía en las fases que el motor proporciona un par positivo (expansión de la carga) para proporcionárselo cuando su par es negativo (compresión de la carga). En el campo de la automoción una reducción del 10% en el peso del vehículo puede suponer una disminución del 3-4% del consumo. Ello ha llevado al diseño de motores más compactos, cuya geometría ( disposición de cilindros ) va variando, al ir incrementando el nº de cilindros del motor : tipo en línea ( 4 cilindros ), V ( 6 a 12 cilindros ) y W ( 12 ó más cilindros ). En el campo aeronáutico, donde la reducción del tamaño y peso del motor es un condicionante más prioritario que en el sector terrestre, también se aplicaron estos criterios al concebir motores de diferente geometría ( orden creciente de cilindros y potencia del motor ) : línea, cilindros horizontales opuestos ( bóxer ), V, W, X ( estrella ) y H. Con la aparición del turborreactor, los MACI dejaron de utilizarse para motores de gran potencia, con lo que algunas de estas soluciones constructivas fueron abandonadas, utilizando actualmente los siguientes tipos de motores : Motores de mediana y gran potencia : Turborreactor Motores de pequeña potencia ( aviación ligera ) : MACI disposición horizontal tipo bóxer (horizontally opposed ) de 4, 6 ó 8 cilindros ( tipo constructivo más usual ). 1 Es decir, geométricamente semejantes y construidos con iguales materiales igualmente solicitados mecánicamente, (lo que implica: igual velocidad media del émbolo e igual presión media de trabajo). MACI / Manel Quera, Ramon Carreras - 20 - 5.3.- Características operativas Velocidad media de giro Habitualmente la velocidad media de giro N del eje de un motor se expresa en revoluciones por minuto (rpm). La frecuencia de giro en radianes/segundo será entonces 2 N 60 (7) La velocidad de giro de régimen nominal tiende a disminuir al aumentar el tamaño del cilindro. Velocidad media del émbolo Otro de los parámetros de funcionamiento de importancia en el diseño es la velocidad media del émbolo. Puesto que por cada revolución el émbolo recorre dos veces la carrera s, la velocidad media del émbolo vendrá dada por: 2sN e (8) 60 En motores de una misma tecnología se observa una cierta tendencia a la disminución de la velocidad media del émbolo al aumentar las dimensiones de sus cilindros. En el conjunto de los MACI de automoción, las velocidades medias del émbolo se sitúan entorno a los siguientes valores: Motores Diesel de transporte industrial 8÷12 m/s Motores Otto 4T de automóvil turismo 11÷16 m/s Motores Otto 4T deportivos y de competición hasta 25 m/s 5.4.- Características efectivas El concepto de magnitud efectiva va asociado al valor de dicha magnitud determinado en el eje del motor. Las magnitudes efectivas se hallan por vía experimental, siendo las más importantes o representativas de las prestaciones del motor : Trabajo efectivo Par motor efectivo Potencia efectiva Consumo específico Potencia efectiva específica We Me Pe ce pe [J] [N m] [kW] [g/kW h] [kW/l] Para la determinación experimental de dichas variables se recurre a la utilización de un banco de ensayos de motores, cuyo esquema básico se resume en la Figura 12, dónde a título de ejemplo se pretende ensayar un motor Otto 4T. De forma resumida, en un banco de ensayos se coloca el motor sobre una bancada y se conecta mecánicamente su eje (cigüeñal) al eje de un freno, de forma que permite girar ambos equipos al mismo régimen de operación (rpm). MACI / Manel Quera, Ramon Carreras - 21 - Para un determinado régimen de alimentación del motor (regulable manualmente según se indica en el esquema), éste genera un par motor efectivo ( Me ) al que se opone el par resistente generado por el freno ( Mr ), el cual es asimismo regulable a voluntad, mediante un mecanismo que incluye dicho freno ( R ). Caudalímetro Regulación caudal ( carga del motor ) Gases de combustión Analizador composición ma Aire Combustible Admisión RPM Mecanismo de regulación del par resistente Cigüeñal Mezcla aire-combustible Tacómetro Circuito de disipación de energía térmica generada ( Ej : circulación agua ) T mc Dosificación combustible ( Carburación ) Sonda temperatura A MOTOR FRENO Me R Mr Fig 12 Esquema de un banco de ensayos de un MACI ( Ejemplo : Motor Otto 4T ) Una vez estabilizado el punto de funcionamiento del motor ( rpm ), el par generado por el motor es el mismo que el par resistente generado por el freno, el cual es medible experimentalmente : Me = Mr Adicionalmente el banco incluye una serie de equipos de medición de las principales variables de operación de l motor: a =Caudal masico m de aire ( kg/s) c =Caudal masico m de combustible ( kg/s) T = Temperatura de los gases de combustión ( escape motor ) A = Análisis de composición de los gases de combustión ( O2, CO2, CO, NOx, CxHy, …) RPM = Régimen de operación del motor ( revol/min de giro del cigüeñal ) El motor puede ser ensayado para distintas condiciones de régimen de alimentación del motor (cantidad de mezcla aire-combustible) y para distintos niveles de carga resistente generada por el freno ( Mr ), obteniendo así un mapa completo de prestaciones del motor. En la actualidad existen diferentes tipos de bancos de ensayos de motores, en función del tipo de freno utilizado, destacando entre los más utilizados los siguientes: Freno mecànico o hidráulico ( agua, aceite) Freno electromagnético ( corrientes de Foucault o generador dinamo ) A partir de las variables de operación experimentales obtenidas en un banco de ensayos, es posible calcular las principales magnitudes efectivas del motor, tal como se resume a continuación. MACI / Manel Quera, Ramon Carreras - 22 - Potencia efectiva ( Pe ) Es la potencia que suministra el eje del motor en unas condiciones operativas determinadas y es calculable mediante la siguiente expresión : Pe Me siendo (9) Pe = Potencia efectiva o potencia mecánica generada en el eje ( W ) Me = Par motor efectivo ( N-m ) w = Régimen de operación del motor ( rad/s ) Con frecuencia el eje del motor (cigüeñal) acciona una serie de órganos auxiliares tales como: ventilador, bomba de agua, bomba de aceite, bomba de combustible, alternador, compresor del aire acondicioando, etc…. Es por ello a la hora de indicar la potencia efectiva del motor, debe indicarse si la potencia efectiva calculada es: Potencia efectiva bruta: Potencia sumnistrada por el motor sin tener en cuenta las pérdidas mecánicas para accionar los elementos auxiliares mencionados Potencia efectiva neta: Potencia disponible una vez descontadas las pérdidas mecánicas para accionar determinados elementos auxiliares Normalmente el ensayo de motores se realiza siguiendo determinadas normas, tales como norma SAE ( Society of Automotive Engineers / USA ) o norma DIN ( Standard of German Industry ). En la norma SAE, se acostumbra a indicar la potencia efectiva bruta y en la norma DIN, se indica la potencia efectiva neta. Consumo específico de combustible ( ce ) En los ensayos de motores se suelen determinar los consumos por hora de combustible y aire. Ahora bien, para obtener unas características de consumo de combustible comparativas entre diferentes condiciones de operación y de puesta a punto y entre diferentes motores, el consumo se expresa comúnmente como consumo horario en relación a la potencia efectiva generada, tal es el concepto de consumo específico (de combustible): ce c m Pe [ g/kW·h ] ( 10 ) El consumo específico de combustible es inversamente proporcional al rendimiento efectivo del motor: e Pe Pe 1 C PCI ce PCI Qaportado m ( 11 ) Es decir cuando el motor opera a mínimo consumo específico de combustible, opera a máximo rendimiento. MACI / Manel Quera, Ramon Carreras - 23 - Relación aire/combustible ( r ) Nótese que el cociente entre el consumo de aire y el de combustible nos proporciona información sobre el tipo de proceso de combustión que tiene lugar en el motor ( exceso o defecto de aire ). r a m c m ( 12 ) La relación aire/combustible de referencia es la relación estequiométrica re ( combustión químicamente ajustada ), es decir, la cantidad de aire es la justa para que todo el combustible de la mezcla se inflame, sin que haya exceso de aire ( oxígeno ), ni inquemados ( combustible ) al final de la combustión. Puesto que la relación estequiométrica varía en función de la composición del combustible, es práctico utilizar el concepto de factor lambda ( ) o factor de aire, definido como : r Relacion aire - combustible real re Relacion aire - combustible estequiometrica ( 13 ) Para < 1 : Mezcla rica ( exceso de combustible o defecto de aire ) Para = 1 : Mezcla neutra o estequiométrica ( usual en motores Otto 4T ) Para > 1 : Mezcla pobre (exceso de aire, usual en motores Diesel 4T ) Los motores Otto alcanzan su mayor potencia con un 0 a 10% de escasez de aire (mezcla rica) y su mayor rendimiento térmico y menor consumo con un 10% de exceso de aire (mezcla pobre). En cambio, los motores Diesel trabajan a máxima potencia con un exceso de aire del 10 al 15%. Potencia efectiva específica ( pe ) Cuando se trata de efectuar un análisis comparativo del nivel de prestaciones de motores de diferente tamaño o cilindrada, resulta útil el empleo de la potencia efectiva específica definida como: pe Pe Potencia efectiva Vd Cilindrada ( 14 ) La potencia específica de los motores de automóvil se sitúa actualmente entorno a los siguientes valores: Otto Aspirado ( 4 válvulas/cil ) ≈ 45-55 kW/l Diesel Aspirado : 22-27 kW/l. Turbosobrealimentado : 27-35 kW/l. Turbosobrealimentado + Refrigeración intermedia : 35-45 kW/l. Como podemos observar, la potencia efectiva específica es mayor en los motores Otto que en los Diesel. MACI / Manel Quera, Ramon Carreras - 24 - 6.- Curvas características de un motor A partir de los datos experimentales obtenidos en un banco de ensayos ( magnitudes efectivas ), los fabricantes de motores acostumbran a representar el nivel de prestaciones de un motor, utilizando dos grandes grupos de gráficos o mapas experimentales: Curvas características a plena carga Planos acotados de consumos específicos Curvas características a plena carga En este tipo de curvas se ensaya el motor a máximo nivel de alimentación de combustible (es decir, a gas máximo), determinando las principales magnitudes efectivas para diferentes régimenes de operación ( N : RPM ) : Par motor efectivo : Me ( N-m ) Potencia efectiva : Pe ( kW ) Consumo específico de combustible : ce ( g/kW-h ) A título de ejemplo, se indica en la Figura 13 adjunta la curva característica a plena carga de un motor Otto 4T. Características constructivas y operativas básicas Especificaciones del motor : Mercedes-Benz M 266 E20 (A 200) Tipo de motor : Otto 4T atmosférico 4 cilindros / Inyección indirecta de combustible multipunto en colector aspiración Diámetro / carrera : 83,0 / 94,0 mm Cilindrada total : 2034 cm3 = relación de compresión = 11 : 1 Características efectivas a plena carga Potencia efectiva máxima : 100,8 kW a 5500 r.p.m. Par motor máximo : 185 Nm a 3500 r.p.m. Consumo específico mínimo : 237 g/kW h a 2500 rpm Potencia específica del motor : 49,6 kW/l. MACI / Manel Quera, Ramon Carreras - 25 - 100,8 100 90 190 80 185 180 70 170 60 160 50 150 40 140 30 130 20 10 290 280 270 260 250 240 237 230 1000 2000 3000 4000 5000 6000 N : Régimen de trabajo ( RPM ) Fig. 13 Curvas características a plena carga de un motor Otto 4T atmosférico de inyección indirecta ( Mercedes-Benz A200 de 2,0 litros ) Para intentar justificar conceptualmente este tipo de curvas experimentales obtenidas en un banco de ensayos, se incluye a continuación un breve análisis comparativo entre el comportamiento teórico de un motor ideal y las prestaciones reales de un motor. Par motor ( Me ) En un motor que operase según un ciclo ideal de referencia, el trabajo por ciclo sería independiente del tiempo invertido en realizarlo (puesto que el rendimiento térmico de los ciclos ideales no es función del tiempo), y por tanto el par motor teórico (o el trabajo por ciclo), para una cantidad invariante de calor suministrado, se mantendría constante respecto al régimen de velocidad del motor ( N ). La evolución del par en este hipotético motor sería el de la línea horizontal punteada de la Figura 14. Ahora bien en, un motor real, el trabajo, y por tanto el par motor, dependen del tiempo empleado en realizar el proceso y, en consecuencia, del régimen de velocidad del motor. Esta dependencia se debe a que por una parte el rendimiento de un ciclo real puede depender de la velocidad con la que se realiza y por otro lado a que la cantidad de fluido motor que opera en el ciclo también se ve afectada por el tiempo disponible para renovar la carga. MACI / Manel Quera, Ramon Carreras - 26 - El hecho de que, a partir de un determinado régimen de velocidad, para el que se ha optimizado la renovación de la carga (tiempos de apertura y cierre de válvulas, longitudes y secciones de conductos, etc.), se produzca un deterioro de la capacidad de aspiración del motor (es decir, del llamado rendimiento volumétrico), provoca que a partir de un cierto número de revoluciones por minuto la masa de aire aspirado por ciclo disminuya, la cantidad de combustible que puede quemar también y asimismo el trabajo realizado; por tanto se detectará una caída del par motor. El efecto de la velocidad sobre el rendimiento se deberá esencialmente a la variación de las pérdidas por fricción, a la variación de las pérdidas de calor y a la velocidad angular del aporte de calor (combustión). M Motor ideal Motor real Los conductos y la distribución están optimizados para una velocidad. Al sobrepasarla los ciclos cada vez proporcionan menos trabajo por ser peor la admisión y el par decae... N [rpm] Fig.14 Curvas de par motor vs. velocidad para un motor que operase según un ciclo ideal y para un motor real La tendencia apuntada en la evolución del par motor se muestra en forma de línea continua en la gráfica anterior ( Motor real ). En la zona de menores rpm también se observa una disminución del par que podemos atribuir a que el motor opera fuera de la zona para la cual se ha optimizado el proceso. Potencia efectiva ( Pe ) La potencia del motor viene dada por P M 2 N M 60 ( 15 ) Según la ecuación 15, en un motor ideal ( M = cte ), la potencia crecería linealmente con el régimen de velocidad tal como se indica mediante la recta punteada de la Figura 15. MACI / Manel Quera, Ramon Carreras - 27 - P La disminución de la calidad de los ciclos no llega a ser compensada por el aumento del nº de ciclos realizados por unidad de tiempo tangente Motor ideal . Motor real Nmin NM max NP max Nmax N [rpm] Fig. 15 Curva de potencia vs. velocidad de un motor real respecto a uno que operase según un ciclo ideal. Puntos característicos de operación. En punteado se indica toda la zona útil de trabajo. Puesto que la disminución del par se hace cada vez más notable al ir aumentando las rpm, llega un momento en que el aumento del número de ciclos por unidad de tiempo no llega a compensar el empeoramiento de éste, y el producto Pe = M , tras pasar por un máximo, disminuye. Para un análogo tamaño y principio operativo de un motor, el régimen de velocidad al cual se obtiene el máximo de potencia es más o menos elevado según sea el diseño de su sistema de renovación de la carga. Así por ejemplo, el uso de válvulas con secciones totales de paso relativamente mayores y de apertura más rápida (3, 4 ó 5 válvulas por cilindro), el uso de conductos de admisión de geometría variable y el uso de sistemas de distribución variable permiten aumentar el régimen a partir del cual decae sensiblemente el par, y por tanto el valor y el correspondiente régimen de máxima potencia se desplazan a mayores cotas, consiguiéndose también potencias específicas superiores. Planos acotados de consumo específico En este tipo de curvas se ensaya el motor a diferentes niveles de alimentación de combustible ( es decir, a diferentes cargas parciales ), determinando las principales magnitudes efectivas para diferentes régimenes de operación ( N : RPM ) : Par motor efectivo : Me ( N-m ) Consumo específico de combustible : ce ( g/kW·h ) A título de ejemplo, se indica en la Figura 16 adjunta el plano acotado de consumos del mismo motor Otto 4T, del que se han indicado las curvas características a plena carga ( Mercedes-Benz A200 ). Dicho motor presenta las siguientes características básicas: Par motor máximo : Consumo específico mínimo : 230 g/kW h a 2500 rpm ( Carga parcial ) 185 Nm a 3500 r.p.m. ( Plena carga ) Debe indicarse que la curva superior de par ( Me ), representada en trazo negro grueso, corresponde a régimen de plena carga. Las prestaciones del motor a carga parcial se representan en forma de líneas de isoconsumo ( ce ) para diferentes régimenes de operación del motor ( N ) y diferente nivel de carga del motor. MACI / Manel Quera, Ramon Carreras - 28 - ce : Consumo específico ( g / kWh ) ce a plena carga 267 245 238 237 250 240 255 262 270 279 289 180 160 140 230 120 235 240 250 100 80 275 60 300 340 40 20 1000 400 600 2000 3000 4000 5000 6000 N : Régimen de trabajo ( RPM ) Fig. 16 Plano acotado de consumos de un motor Otto 4T atmosférico de inyección indirecta ( Mercedes-Benz A200 de 2,0 litros ) De forma similar a las curvas características a plena carga, se incluye a continuación una breve justificación teórica de las curvas obtenidas a carga parcial ( plano acotado de consumo ). Especialmente en el caso de la automoción, un motor no suele operar siempre gas a fondo, sino que puede trabajar dentro de un campo de utilización delimitado por un régimen de mínima velocidad estable, un régimen de máxima velocidad segura (sin daños), una carga mínima (en vacío) y una carga máxima (máxima alimentación). En el campo de los motores industriales estacionarios sí que es frecuente que el motor opere continuamente a plena carga, razón por la cual, un mismo motor, si se destina al campo industrial, se le rebaja la curva de par a plena carga respecto a la que se le toleraría en automoción. En la Figura 17, se han trazado dos curvas de potencia efectiva, la superior correspondiente a plena carga y la interior correspondiente a una carga parcial. La zona punteada, situada entre Nním y Nmáx, representa todo el campo de utilización del motor. MACI / Manel Quera, Ramon Carreras - 29 - Potencia resistente Pe puntos de equilibrio Pe = Pr Plena carga Pe = max Carga intermedia CAMPO DE UTILIZACION * N min Vacío (*ralentí Pe =0) N max Fig. 17 Campo de utilización de un motor Sobre el mismo gráfico se ha trazado una curva representativa de una potencia resistente del tipo de la hallada en una aplicación automotriz. Los puntos de intersección de la curva de potencia resistente con una curva de potencia motriz (efectiva) indican un régimen de equilibrio. Si se aumenta el gas, el motor acelera hasta interseccionar con la curva resistente a un mayor régimen de velocidad. Recíprocamente, para una carga (gas) constante, si se aumenta la resistencia (por ejemplo como consecuencia de un aumento de la pendiente de la carretera) se pasa a otra curva de resistencia de mayor curvatura (no representada) con lo que el motor perderá velocidad hasta hallar el nuevo punto de equilibrio. Un punto singular de la operación en vacío, y por tanto en el que toda la potencia generada es absorbida para vencer las pérdidas mecánicas de fricción y de accionamiento de auxiliares, es el de ralentí. En ralentí el motor no produce trabajo efectivo y gira al régimen de velocidad al que se equilibran las pérdidas mecánicas (función de N) con el trabajo generado (función de la cantidad de combustible suministrado). Este régimen de velocidad debe ser suficiente para que la energía cinética inercial almacenada como consecuencia del giro inducido por una explosión pueda realizar la compresión de la carga en el ciclo siguiente. En caso de que (I2) sea insuficiente, no se completará la compresión y el motor se calará. En un motor en concreto su rendimiento, y en consecuencia su consumo específico, no es constante sino que es función de las condiciones variables o controladas de operación. (variables: % carga, régimen de velocidad, estado térmico, y controladas: avances/retrasos en encendido, inyección, distribución, etc.). Es por ello que los consumos específicos variarán dentro de todo el campo de utilización del motor. Tal como ya se indicó, para visualizar los niveles de consumo específico dentro de toda la zona de utilización del motor se usan planos acotados de consumo específico, en los que mediante unas curvas de nivel se demarcan las zonas de isoconsumo (las curvas unen puntos de igual consumo específico). Esta técnica de representación gráfica se puede utilizar para describir otras características de operación del motor, trazando, por ejemplo dentro de la zona de utilización, las curvas de igual nivel de emisión de un determinado contaminante, las curvas de igual rendimiento mecánico, las de igual trabajo de bombeo, las de igual emisión sonora, etc. MACI / Manel Quera, Ramon Carreras - 30 - 7.- Problemas 7.1.- Balance de energía de un MACI ( Base PCI ) Un MACI tipo Otto 4 tiempos opera en las condiciones de trabajo indicadas de la figura adjunta. Datos de cálculo PCI gasolina : 41.500 kJ/kg Calor específico gases de combustión (escape) : cpGC = 1,2 kJ/kg°C Calor específico agua: cpW = 4,184 kJ/kg°C Gasolina To = 25 ºC mc= 13,57 kg/h 0 ma Mezcla aire-gasolina =1 Aire To = 25 ºC mGC TGC = 500 ºC GC 0 Gases combustión ( escape motor ) Sistema inyección gasolina ( colector aspiración ) 3000 rpm Volumen de control MACI W ef (kW) ( Otto 4T ) Eje motor Agua mw= 2.870 kg/h T2 = 90 ºC 1 2 Circuito refrigeración bloque del motor RADIADOR Qrad (kW) 1. Plantear el balance de energía del motor ( Base PCI ) Balance másico E = S ( kg/s ) c m a m GC m Combustible Aire Gases combustión T1 = 70 ºC Aire exterior T = 25 ºC MACI / Manel Quera, Ramon Carreras - 31 - Balance de energía E = S ( kW ) TGC HcTo HaTo HwT1 HwT2 HGC W ef TGC To To HcTo HaTo HGC HwT2 HwT1 HGC HGC W (1 ) ef Reacción de combustión a To = 25 ºC Combustible + Aire → GC + Qcomb ← ( Calor reacción a To = 25 ºC) To To To To HcTo HaTo HGC Q comb Qcomb Hc Ha HGC mc kg / s ·PCI kJ / kg (2) PCI = Calor generado por combustión del combustible ( gasolina ), suponiendo que la reacción tiene lugar a T0 = 25 ºC Entalpía gases ideales / líquidos Entalpía específica : h = cp·T ( kJ/kg ) ·h m ·cp ·T ( kW ) ( 3 ) Entalpía : H m Introduciendo las ecuaciones ( 2 ) y ( 3 ) en la ecuación general de balance de energía del motor ( 1 ), se llega a : To To To Q comb Hc Ha HGC mc ·PCI Calor generado por combustion H T2 H T1 m w ·c pw · ( T2 T1 ) Calor transferido al agua( refrigeracion del motor ) Q rad w w H TGC H To m GC ·c pGC · ( TGC To ) Perdidas de calor gases de escape Q esc GC GC Q comb Q rad Q esc W ef MOTOR TÉRMICO MOTOR TÉRMICO ( Principio operativo general ) ( Principio operativo MACI ) Fuente caliente Fuente caliente Tc Tc Qc ( Gases combustión ) ( Gases combustión ) Qc = Q comb Ciclo termodinámico de potencia Ciclo de potencia Otto W W ef Qesc Qf Qf = Qrad + Qesc Gases comb Tf ( Aire exterior 25 ºC) Tf Aire Fuente fría Qcomb = W Qc Fuente fría MACI ( Otto ) Wef = Combustible Agua Qrad Wef Qcomb ( Aire exterior 25 ºC) MACI / Manel Quera, Ramon Carreras - 32 - 2. Plantear la reacción estequiomètrica de combustión aire-gasolina y determinar la relación aire/combustible ( rea ) de dicha reacción Masas molares : C=12, H=1, Aire=28,965 C7H12 + 10 ( O2 + 3,76 N2 ) 7 CO2 + 6 H2O + 37,6 N2 Tomando de base 1 mol de gasolina : 1 mol C7H12 = 7x12 + 12x1 = 96 g gasolina 1 mol C7H12 reA 10 4,76 molsaire 28,965 g 1378,73 g aire 1 mol C7H12 1 molaire Masa aire 1378,73 17,36 kgaire / kgcomb Masa Combustible 96 3. Determinar la potencia efectiva ( potencia al eje ) suministrada por el motor Balance másico GC m c m a m c reA m c m GC 13,57 14,36·13,57 208,43 kg/h m Balance de energía Q comb Q rad Q esc W ef 13,57 Q 41500 156,3 kW comb m PCI 3600 m GC ·cP ·T 25 208,43 x1,2 x 500 25 33,0 kW Q esc GC 3600 m w ·cP · 90 70 2870 x4,184x 90 70 66,7 kW Q rad w 3600 156,3 33,0 66,7 W ef 56,6 kW W ef 4. Determinar el rendimiento al que opera el motor W 56,6 ef ef 0,362 Qcomb 156,3 Tc Qcomb = 156,3 kW Wef = 56,6kW Consumo específico del motor m 13,57 ·1000 g/h ce c 240 56,6 kW Wef QRad+ QEsc = 99,7 kW Tf Comentario final Los datos utilizados para realizar el balance de energía de un MACI que se ha presentado corresponden aproximadamente al motor Otto 4T Mercedes-Benz A 200, operando a 3000 rpm en régimen de plena carga. MACI / Manel Quera, Ramon Carreras - 33 - 7.2.- Motor Otto Se pretenden deducir las principales características efectivas del motor Otto 4T anteriormente descrito ( Mercedes-Benz A200 ), utilizando el plano acotado de consumos específicos de dicho motor ( Figura 16 ). Datos motor Otto 4T atmosférico / Inyección indirecta de combustible Cilindrada total : 2034 cm3 Datos combustible Gasolina : PCI = 41.500 kJ / kg / d = 0,75 kg/litro Fórmula aproximada: C7H12 Masas molares: C=12, H=1, 0=16 1. Determinar el máximo rendimiento efectivo que presenta este motor max Ce min 230 Ce 230 max g / h M 150 N·m kW N 2500 rpm g 1kWh 1 kg 6,389x10 5 kg / kJ x x h·kW 3600 kJ 1000 g 1 1 0,377 Ce ·PCI 6,389 x105 x 41500 2. Determinar la potencia efectiva máxima que presenta este motor Pe W M N·m ·w rad / s M 2 N 60 PeMAX MxN MAX A partir del gràfico podemos determinar el régimen para el que ( MxN ) sea máximo, mediante la siguiente tabla : N 3000 3500 4000 4500 5000 5500 6000 M 180 185 185 182 180 175 156 MxN 540.000 647.500 740.000 819.000 900.000 962.500 ←MAX 936.000 MACI / Manel Quera, Ramon Carreras PeMAX 175 - 34 - 2 5500 100.793 W 100,8 kW 60 Potencia efectiva específica : pe Pefectiva 100,8 kW 49,56 kW/l Vd 2,034 l 3. En el régimen de trabajo del motor indicado en la pregunta anterior, ¿Cuál sería el consumo horario de combustible y las emisiones de CO2 a la atmósfera que genera dicho motor? C7H12 + 10 ( O2 + 3,76 N2 ) 7 CO2 + 6 H2O + 37,6 N2 MC7H12 = 7x12 + 12 x 1 = 96 g/mol MCO2 = 1x12 + 16 x 2 = 44 g/mol Consumo de gasolina : 100,8 kW 279 g / h 28.123 g / h 28,12 kg / h 28,12 / 0,75 37,49 l / h 1 kW Emisiones de CO2 28,12 44 g CO2 1 kg CO2 kg gasolina 1000 g 1 mol gasolina 7 mol CO2 90,22 kg CO2 / h h 1 kg 96 g gasolina 1 mol gasolina 1 mol CO2 1000 g CO2