Método de M´ınimos Cuadrados Recursivo
Anuncio

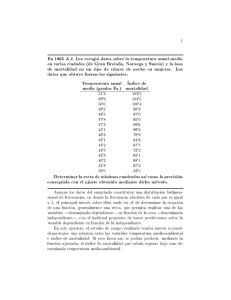
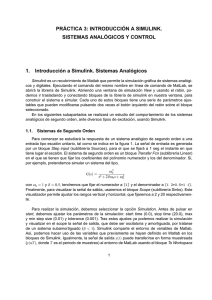
Control Avanzado Práctica 4 Método de Mı́nimos Cuadrados Recursivo José Gerardo Gomez Mendez Abril 27, 2015 Resumen El presente trabajo presenta un sistema de un circuito RLC, donde se utiliza el método de mı́nimos cuadrados recursivos para realizar una simulación que sea la más próxima al sistema real, que como ya se sabe de todos los métodos anteriormente utilizados es el que ofrece una mayor simplicidad conceptual y aplicabilidad en un amplio rango de situaciones. Índice 1. Introducción 1 2. Desarrollo 3 3. Resultados 5 4. Conclusiones 6 Índice de figuras 1. 2. 3. 1. Sistema eléctrico, circuito RLC . . . . . . . . . . . . . . . . . . . Simulación en Matlab . . . . . . . . . . . . . . . . . . . . . . . . Comparación del modelo identificado con el modelo original . . . 2 4 6 Introducción Los algoritmos de mı́nimos cuadrados pueden ser fácilmente interpretados desde el punto de vista de otros métodos, haciendo posible un tratamiento unificado del problema de identificación. Asimismp, la rapidez de convergencia (en 1 1. Introducción los algoritmos de mı́nimos cuadrados) de los parámetros del modelo a los del sistema es apropiada, ası́ como la robustez frente a distintos puntos de error como reuido, dinpamida no modelada, precisión numérica, etc. La estimación de los parámetros del modelo del proceso puede ser llecada a cabo, para el método de los mı́nimos cuadrados recursico (RLS), con el algoritmo que se detalla a continuación. Definiendo el error de ecuación como la discrepancia entre la salida medida y la obtenida a partir de la ecuación del modelo con los parámetros estimados: y(k)+a1 (k−1)y(k−1)+· · ·+am (k−1)y(k−m)−b1 (k−1)u(k−d−1)−· · ·−bm (k−1)u(k−d−m) = e(k) (1) Este error es debido a las perturbaciones que actúan sobre el sistema, errores en las mediciones y en la estimaci[on de los par[ametros. El error puede tambi[en especificarse en la forma: e(k) = y(k) − y( k ) k−1 (2) Siendo: k ) = −a1 (k−1)y(k−1)−· · ·−am (k−1)y(k−m)+b1 (k−1)u(k−d−1)+· · ·+bm (k−1)u(k−d−m) k−1 (3) Por tanto, con los conocimientos adquiridos se considerará el circuito de la figura 1 y( Figura 1: Sistema eléctrico, circuito RLC Para: 1. Calcular el modelo matemático del sistema representado en la figura 1, tiempo continuo. 2. Calcuare el equivalente discreto del modelo de la figura 1. 2 2. Desarrollo 3. Realizar una simulación del modelo discreto. 4. Implementar el algoritmo del Método de Mı́nimos Cuadrados Recursivo (MMCR). 5. Identificar el modelo usando el MMCR con los datos simulados. 6. Comparar el modelo identificado con el modelo original. 2. Desarrollo Para comenzar, es indispensable mediante el sistema inicial, propuesto, escribir las ecuaciones que describen su comportamiento, lo cuál para este caso en particular se logra mediante las leyes de Kirchhoff. Al tener dos mallas en el circuito, se sabe que serán a su vez dos las ecuaciones las que se tendrán, siendo: Z t 1 (i1 − i2 (t))dt (4) vi (t) = R1i1 (t) + C1 0 Y: 1 C1 Z t (i2 − i1 (t))dt + L 0 d 1 i2 (t) + dt C2 Z t i2 (t)dt = 0 (5) 0 Por lo que para calcular el voltaje de salida se obtiene: Z t 1 i2 (t)dt vo (t) = C2 0 (6) Como se sabe, para continuar es estrictamente necesario obtener su Transformada de Laplace, con lo cual queda: Vo (s) = 1 I2 (s) C2 (7) Vo (s) Vi (s) (8) Posteriormente y sabiendo que H(s) = Se obtiene la función de transferencia: H(s) = 1 1 × 10−10 s3 + 1 × 10−9 s2 + 0,2s + 1 (9) Ahora bien, para poder calcular el equivalente discreto de este función, primeramente se tiene que llevarla a un dominio del tiempo, por lo cual se aplica las ptropiedades de la transformada de Laplace, para posteriormente usar la definición de la transformada Z. Puesto que al tener una función con tres raı́ces donde dos de ellas se encuentran 3 2. Desarrollo en los números complejos, se simplificó la obtención de las mismas mediante el siguiente código de Matlab, utilizando un tiempo de muestreo de0 .01 segundos: F=tf([1] , [(r*l*c1*c2) (l*c2) ((r*c2)+(r*c1)) 1] Ts = 0.01; F2 = c2d(F,Ts) Ası́ es como con las raı́ces se obtiene un equivalente discreto mediante la transformada Z: 0,0487Z −1 − 0,0123Z −2 + 0,046Z −3 (10) H(Z) = 1 − 1,823Z −1 + 1,781Z −2 − 0,905Z −3 Posteriormente, para poder simular el modelo discreto, se obtiene la ecuaci[on de diferencias del modelo real: y(k) = 1,823y(k−1)−1,781y(k−2)+0,9048y(k−3)+0,0487u(k−1)−0,0423u(k−2)+0,0463u(k−3) (11) Al realizar la simulación en Matlab, se utilizaron 1000 muestras a una frecuencia de 100 rad/s, con un orden del modelo de n=3. Aunado a esto, se tiene una señal de exitación que mantiene un valor aleatorio de cero y uno, siendo constante durante las primeras 200 muestras, para posteriormente cambiar a otro. Figura 2: Simulación en Matlab En la figura anterior se puede ver la respuesta de la simulación, en donde la aproximación pasando un t=2 es bastante precisa. El paso número cuatro, consiste en implementar el algoritmo del Método de Mı́nimos Cuadrados Recursivos, para posteriormente identificarlo con los datos simulados. Puesto que con la simulación anterior se obtuvieron los pares de datos de la señal de excitación, ası́ como la respuesta del sistema, se calculan los parámetros de P para relacionar estor pares de datos que se encuentran en el vector Z. Con estas operaciones es posible construir un modelo discreto equivalente al modelo real. El último dato necesario es el de factor de olvida, que en este caso será de 0.95. Esto es porque el método al ser recursico, va actualizando los parámetros de P, dependiendo de los valores que se obtienen 4 3. Resultados de la excitación y de la respuesta. A continuación se presenta el algoritmo que se implementará en Matlab: g(t + 1) = C(t)Z(t + 1) (12) a2 (t + 1) = Φ2 + Z T (t + 1)g(t + 1) (13) e(t + 1) = y(t + 1) − P T (t)Z(t + 1) (14) P (t + 1) = P (t) + C(t + 1) = 3. 1 g(t + 1)e(t + 1) α2 (t + 1) 1 1 (C(t) − 2 g(t + 1)g T (t + 1)) Φ2 α (t + 1) (15) (16) Resultados Con los datos obtenidos en la simulación, se obtuvo el modelo discreto, el cual quedó de la siguiente forma: H(Z) = 0,0487Z −1 − 0,0123Z −2 + 0,046Z −3 1 − 1,823Z −1 + 1,781Z −2 − 0,905Z −3 (17) El último paso consiste en comparar tanto el modelo real, como el modelo discreto, para lo cual se utiliza un diagrama de bloques en simulink para obtener las gráficas de forma simultánea, arrojando lo siguiente: 5 4. Conclusiones Figura 3: Comparación del modelo identificado con el modelo original 4. Conclusiones Como se puede observar en la figura 3, el modelo discreto que se logró identificar se aproxima casi en su totalidad al modelo real cuando la magnitud es de 10, y esto es desde el tiempo cero. Lo que da como resultado que el Método de Mı́nimos Cuadrados Recursivos logra una aproximación bastante precisa, con solo ciertos puntos de diferencia. Lo que además se aprendió es que la precisión la basa en el ajuste en tiempo real de sus valores, por lo que es mucho más complejo que el normal. Referencias [1] Ollero Baturone Anı́bal, Control por computadora, Primera Edición,Marcombo, Barcelona, 1991. [2] Ogata Katsuhiko, Ingenierı́a de Control Moderna, Cuarta Edición,Pearson, Madrid, 2003. [3] Moreno Luis, y Garrido Santiago, Ingenierı́a de Control: Modelado, Análisis y Control de Sistemas Dinámicos, Primera Edición,Ariel Ciencia, Barcelona, 2003. 6