diseño de un regulador pid para controlar un giroscopio usando la
Anuncio

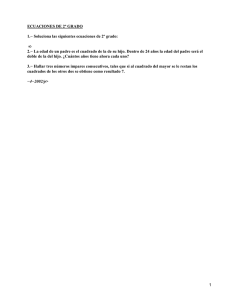
DISEÑO DE UN REGULADOR PID PARA CONTROLAR UN GIROSCOPIO USANDO LA TEORÍA DE BIFURCACIONES Manuel F. Pérez Polo, José Ángel Berná Galiano, Javier Gil Chica Departamento de Física Ingeniería de Sistemas y Teoría de la Señal. Universidad de Alicante. Escuela Politécnica Superior. Apartado 99, E-03080. Alicante. E-mail: [email protected]; [email protected] ; [email protected] Manuel Pérez Molina Dpto. Ciencia de Materiales Óptica y Tecnología Electrónica, Universidad Miguel Hernández, Avda. Ferrocarril sn 03202 Elche E-mail: [email protected] La teoría de bifurcaciones describe como las propiedades topológicas de un sistema dinámico (número de puntos de equilibrio y órbitas periódicas en el espacio de fases) cambian al variar uno o más parámetros del mismo. Un punto de equilibrio se dice que es hiperbólico cuando los autovalores de la matriz jacobiana, resultante de linealizar el sistema en ese punto, tienen partes reales no nulas. En tal caso la dinámica del sistema no lineal está determinada por la del sistema linealizado en dicho punto. Un punto de equilibrio se dice que es no hiperbólico cuando uno o más autovalores de la matriz jacobiana, resultante de linealizar el sistema en ese punto, tienen parte real nula. Es claro que los puntos no hiperbólicos son de los que se ocupa la teoría de bifurcaciones. El propósito de este trabajo es diseñar un algoritmo que permita ajustar los parámetros de un regulador PID usando el primer valor de Lyapunov deducido a partir de una bifurcación del tipo Andronov-Poincaré-Hopf, la cual aparece para ciertos valores de saturación de la acción integral. Se demuestra que el sistema puede tener varios puntos de equilibrio, cuya estabilidad o inestabilidad son fundamentales para el diseño del regulador PID. Los resultados de simulación muestran un buen comportamiento dinámico del sistema en función de los valores que se deducen del primer valor de Lyapunov. Resumen En este trabajo se estudia el diseño de un regulador PID para controlar la posición de un cuerpo conectado al anillo exterio,r a partir de la medida del ángulo de giro del anillo interio,r de un giroscopio en suspensión Cardan. El modelo matemático del giroscopio se obtiene a través de la teoría de nutación, que junto con las ecuaciones de un regulador PID, con saturación en la acción integral, puede dar lugar a una bifurcación del tipo AndronovPoincaré-Hopf. A partir del análisis de la estabilidad de dicha bifurcación, se presenta un algoritmo de cálculo que permite determinar la constante de acción proporcional, el tiempo de reset y el tiempo de acción derivado del regulador PID. Se estudian los puntos de equilibrio del sistema, la aparición de un foco débil y el cálculo del primer valor de Lyapunov, cuyo signo permite determinar la estabilidad de dicho punto. Se discute brevemente la aplicación del teorema de la variedad central y su aplicación al cálculo del primer valor de Lyapunov, así como algunas dificultades numéricas que aparecen en la simulación. Palabras clave: Giroscopio, regulador PID, bifurcación, Andronov-Poincaré-Hopf, variedad central, primer valor de Lyapunov. 1 INTRODUCCIÓN 2 MODELO MATEMATICO DEL GIROSCOPIO Actualmente es un hecho generalmente aceptado que la teoría de bifurcaciones puede ser una herramienta útil para el diseño del control en sistemas no lineales. Sin embargo, la concreción de esta idea en casos particulares puede presentar notables dificultades, aún con sistemas de control simples como puede ser un regulador PID [1], [3], [4], [6], [7], [8]. Es por ello que estas técnicas no están muy extendidas en el campo de la ingeniería de control, quizás por la complejidad de la maquinaria algebraica involucrada. [6], [7], [8], [9], [10], [11], [12]. Las ecuaciones del giroscopio son las siguientes [1], [6], [7], [8], [9] d α (t ) 2 J dt 2 + H cos β d β (t ) dt d β (t ) 2 Hr 1 dt 2 − H cos β dα dt ∗ ⎫ ⎪ ⎬ (25) ⎪ ⎪⎭ = Mα + M ⎪ =0 Engranaje N2 CUERPO A ESTABILIZAR SOMETIDO A PERTURBACIONES Y1 ≡ Y2 ≡ Y ANILLO INTERIOR ANILLO EXTERIOR dβ/dt dα/dt γ Mα(t) dγ/dt α X2 O M* ROTOR Z1 ≡ Z X1 ≡ X β + Z2 SENSOR Engranaje N1 M(t) β TRANSDUCTOR INVERSOR - R βr i(t) eb = K b dϕ u(t) dt ϕ AMPLIFICADOR Y REGULADOR PID Ka; Kp, τi, τd V(t) DC MOTOR: M(t) = Kmi(t) Figura 1. Giroscopio en suspensión Cardan.. Valores de parámetros: A1 = B1 = 0.045 kg.m2, C1 = 0.05625 kg.m2, A2 = 0.04875 kg.m2, A = 0.01125 kg.m2, C = 0.0225 kg.m2, Hr = 0.05625 kg.m2, Jm = 0.001 kg.m2, j = 10, Km = 5 N.m/A, Kb = 0.04 V.s, R = 0.5 Ω, L = 0.01 H, Ka = 10. horizontal debido al motor externo DC, y M* es un par externo de perturbaciones aplicado al cuerpo conectado al anillo exterior. Las ecuaciones (1) representan el modelo del giroscopio sin control. [1], [6], [7], [8], [9]. La señal de control V(t) se aplica a través del motor DC. Los parámetros R, Kb and Km son la resistencia, fuerza contra-electromotriz y constante del par del motor. El par motor se transmite al eje del anillo exterior a través de un tren de engranajes con relación del número de dientes j = N2/N1. Con las consideraciones anteriores se pueden escribir las siguientes ecuaciones: El parámetro J se define por la ecuación: J = A2 + A1 + A = A2 + C1 (2) en la que A2 el momento de inercia del anillo exterior referido a su eje de rotación, A1, B1, C1 son los momentos de inercia del anillo interior respecto a los ejes principales de inercia; A y C son los momentos de inercia polar y ecuatorial del rotor, y H r = A + B1 . La ecuación (39) significa que en el diseño mecánico del giro se supone que A1 + A = C1 , y por tanto el momento de inercia total del giro es constante. H es el momento cinético del rotor del giro que es una constante definida por: H = C ⋅ nr ⋅ 2π / 60 donde nr es la velocidad del rotor en rpm, Mα es el par aplicado al eje d ϕ (t ) 2 M (t ) = J m 5 dt 2 − Mα j (3) ; M (t ) = K m i ( t ) d ϕ (t ) d α (t ) =−j dt j= dt N2 ; L di (t ) N1 dt d α (t ) 2 ; Mα = − j Jm 2 dt + Ri (t ) = V (t ) − K b 2 − jK m i (t ) d ϕ (t ) dt (4) dα − jK m i (t ) 2 x 4 (t ) = d α (t ) 2 dt 2 + H cos β (t ) d β (t ) dt d β (t ) d α (t ) 2 Hr dt 2 − H cos β (t ) =0 dt Ri (t ) = V (t ) + jK b d α (t ) dt ∗ ⎫ ⎪ ⎪ ⎡ Rx (t ) − K K ( x (t ) − x ) ⎤ ⎪ 3 1r a p 1 ⎢ ⎥ ⎪ ⎥ x1(t ) = α c cos x1(t ) ⎢⎢ ⎪ Ka K p ⎥ ⎪ τ K K x ( t ) x ( t ) − − ⎢ d a p 2 τ i 4 ⎥⎦⎥ ⎪ ⎣⎢ ⎪ ⎪ x3 (t ) = −βc x3 (t ) − γ c x2 (t )cos x1(t ) + δ c cos x1(t ) ⋅ ⎪⎪ ⎬ ⎡ ⎤⎪ Ka K p ⎢ Rx (t ) − K K ( x (t ) − x ) −τ K K x (t ) − ⎥ x (t ) ⎪ 3 1r a p 1 d a p 2 ⎢ τi 4 ⎥ ⎪ ⎣ ⎦⎪ ⎪ Ka K p Ka K p jKb * ⎪ ⎡ x (t ) − x ⎤ + + x (t ) + M ⎪ 1r ⎦ Rτ i ⎣ 1 R 2 JT R ⎪ ⎪ ⎪ x4 (t ) = x1(t ) − x1r ⎪⎭ ⎫ ⎪ ⎪ ⎪ ⎬ ⎪ ⎪ ⎪ ⎭ (10) siendo: (6) siendo J T = J + j J m . Por otro la ecuación del regulador PID vienen dada por: ⎡ 1 V ( t ) = K a K p ⎢ β (t ) − β r + τi ⎢⎣ + K a K pτ d ∫ 0 αc = ⎤ ( β (τ ) − β r ) dτ ⎥ ⎥⎦ 2 + H cos β (t ) dt d β (t ) = − jK m i (t ) + M τ d Ka K p H jK b H r R j Km Kb RJ T = ; γc = τ d Ka K p R jK b H RJ T αc Por otro lado es conocido que en reguladores con acción integral es necesario limitarla para evitar problemas debidos a valores excesivos de la esta. Por tanto, si se limita el valor de la acción integral, las ecuaciones (10) se pueden simplificar asumiendo que x4 = Im, siendo Im el valor máximo que alcanza la acción integral del regulador PID. Las ecuaciones (10 quedan de la forma: d β (t ) ⎫ ⎪ dt dt ⎪ 2 d β (t ) d α (t ) ⎪ Hr − H cos β (t ) =0 2 ⎪⎪ dt dt ⎬ t 1 dβ ⎤⎪ ⎡ V (t ) = K a K p ⎢ β (t ) − β r + ∫ ( β − β r ) dτ + τ d ⎥ τi 0 dt ⎦ ⎪ ⎣ ⎪ d α (t ) ⎪ Ri (t ) = u (t ) + jK b ⎪⎭ dt 2 jK b H r ; βc = (11) De las ecuaciones (6) y (7), se obtienen el modelo matemático del sistema con regulador PID: d α (t ) 2 H δc = (7) JT r x1(t ) = x2 (t ) 2 t ∫ (β (τ ) − β )dτ (9) se deducen las siguientes ecuaciones: (5) = − jK m i (t ) + M ; x3 (t ) = i (t ) o dt Sustituyendo la ecuación (5) en la (1) se deducen las ecuaciones del giroscopio: JT dt t 2 Mα = − j Jm d β (t ) x1 (t ) = β (t ) ; x2 (t ) = siendo Jm el momento de inercia del eje del motor, M(t) es el par motor, ϕ(t) el ángulo de giro del eje del motor, Mα es el par aplicado al eje de rotación del anillo exterior, i(t) es la corriente a través del motor de corriente continua DC. Obsérvese que se supone que la inductancia del motor es despreciable. De las ecuaciones (4) se deduce: 2 En las ecuaciones (8) la variable α(t) solo aparece bajo el símbolo de derivada, por lo que se puede considerar que actúa de forma similar a una variable cíclica, por lo que conviene eliminarla entre las ecuaciones (8). Introduciendo las variables de estado: ∗ (8) 3 x1(t ) = x2 (t ) ⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ x3 (t ) = −βc x3 (t ) − γ c x2 (t )cos x1(t ) + δ c cos x1(t ) ⋅ ⎬ ⎪ ⎡ Ka K p ⎤ ⎪⎪ ⎢ Rx (t ) − K K ( x (t ) − x ) −τ K K x (t ) − I ⎥ 3 1r a p 1 d a p 2 ⎢ τ i m ⎥ ⎪⎪ ⎣ ⎦ ⎪ ⎪ Ka K p Ka K p jKb * ⎡ x (t ) − x ⎤ + ⎪ x t M ( ) + + 1r ⎦ ⎪ R 2 JT R Rτ i ⎣ 1 ⎭ ⎡ Rx (t ) − K K ( x (t ) − x ) ⎤ 3 1r ⎥ a p 1 ⎢ x1(t ) = α c cos x1(t ) ⎢⎢ K a K p ⎥⎥ Im ⎥ ⎢ −τ d K a K p x2 (t ) − τ i ⎣⎢ ⎦⎥ (12) π /2 Es importante tener en cuenta que cuando la acción integral es menor que el máximo valor permitido Im, la dinámica del sistema viene definida por las ecuaciones (10), (11), pero cuando se alcanza el valor Im la dinámica del sistema viene gobernada por las ecuaciones (11), (12). A partir de las ecuaciones (11) y (12) Eliminando x3e entre las ecuaciones (15) se 3 PUNTOS DE EQUILIBRIO Y ANALISIS DE LA BIFURCACION El mismo razonamiento permite obtener la acción integral asociada al punto de equilibrio P3: deduce: I I ⎞⎛ π ⎞ ⎟ ⎜ 2 − x1r ⎟ ⎠ ⎠⎝ 3π / 2 = RJ RM * ⎛ − ⎜τ i − 2 T K a K p jK m ⎝ j K m Kb τi ⎞ ⎛ 3π ⎞ ⎟ ⎜ 2 − x1r ⎟ ⎠ ⎠⎝ Es importante tener en cuenta que a partir de las ecuaciones (16) y (17) se deduce que si x1 r < π / 2 entonces I 3π / 2 <I π /2 . Los razonamientos anteriores permiten concluir que el sistema evolucionará al punto de equilibrio P1 si los autovalores de la matriz jacobiana tienen parte real negativa y los puntos P2 y P3 son inalcanzables. Por tanto, es necesario analizar el comportamiento del giroscopio en los puntos, P2 y P3. τi ⎪ ⎬ Ka K p jK b ∗ − β c x3 e + ( x1e − x1r ) + M = 0⎪ ⎪⎭ Lτ i LJ T (13) Punto P2 (x1e = π/2, x2e = 0, x3e,) donde el valor de x3e se calcula a partir de la segunda ecuación (13) sustituyendo x1e por π/2: • Punto P3 (x1e = 3π/2, x2e = 0, x3e,) en este caso el valor de x3e se determina de la segunda ecuación (13) sustituyendo x1e por : 3π/2 Nótese que para n entero y, x1e = (4n+1)π/2, x1e = (4n+1)3π/2 también se obtienen los puntos de equilibrio P2 y P3 respectivamente. Si la acción integral está restringida a un valor arbitrario Im en los puntos P2 y P3 se verifica: • 3.1. Análisis de la bifurcación en el punto P3 El análisis de la bifurcación comienza en el punto P3, puesto que como se verá más adelante este punto de equilibrio es el más importante para entender como se desarrolla el algoritmo de ajuste de los parámetros del regulador PID. Para ello, se realiza una translación de coordenadas para trasladar el punto al origen, o sea: x1′ (t ) = x1 (t ) − 3π 2 ; x2′ (t ) = x2 (t ) − x2 e (18) x3′ (t ) = x3 (t ) − x3 e Sustituyendo las ecuaciones (18) en las (12) y teniendo en cuenta las ecuaciones de equilibrio (13) se obtiene: ⎛π ⎞ Ka K p I ≠ 0 ⎫ P2 : Rx3 e − K a K p ⎜ − x1r ⎟ − m ⎪ ⎝2 ⎠ τi ⎪ ⎬ Ka K p 3π ⎛ ⎞ 3π / 2 − x1r ⎟ − I m ≠ 0⎪ P3 : Rx3 e − K a K p ⎜ ⎝ 2 ⎠ τi ⎭⎪ π /2 x1′(t ) = x2′ (t ) (14) x2′ (t ) = αcsenx1′(t ) ⎡⎢ Rx3′ (t ) − K a K p x1′(t ) −τ d K a K p x2′ (t ) + ⎣ Además, es posible determinar el valor de Im en los puntos P2 y P3, ya que a partir de las ecuaciones (14) particularizadas en el punto P2 se deduce: ⎛π ⎞ Ka K p I π / 2 = 0 ⎫ π /2 Rx3 e − K a K p ⎜ − x1r ⎟ − ⎪ ⎝2 ⎠ τi ⎪ − β c x3 e RJ RM * ⎛ − ⎜τ i − 2 T K a K p jK m ⎝ j K m Kb τi (17) Punto P1 (x1e, x2e = 0, x3e,) Considerando valores fijos de x1r, M*, Kp y τi, el valor de x1e y x3e de las ecuaciones (12) se deduce: Ka K p ⎫ Rx3 e − K a K p ( x1e − x1r ) − Im = 0⎪ π /2 = (16) A partir de las ecuaciones (11) y (12) se analizan los puntos de equilibrio del sistema global: • π /2 x3′ (t ) = −βc x3′ (t ) + δ csenx1′(t ) ⋅ ⎡ Rx′ (t ) − K K x′(t ) − (τ K K + γ / δ ) x′ (t ) + p ⎤ 3 3 ⎦⎥ a p 1 d a p c c 2 ⎣⎢ + Ka K p jK x′ (t ) + b M * R 2 JT R ⎫ ⎪ ⎪ ⎪ ⎪ ⎤ p3 ⎥ ⎪ ⎦⎪ ⎪ ⎬ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎭ (19) siendo: ⎬ jK b π ⎛ ⎞ + M * = 0⎪ ⎜ − x1r ⎟ + ⎪⎭ Lτ i ⎝ 2 ⎠ LJ t ⎛ 3π − x ⎞ − K a K p I m 1r ⎟ ⎝ 2 ⎠ τi Ka K p p3 = Rx3 e − K a K pπ ⎜ (20) (15) 4 Si se supone que Im = I3π/2 de las ecuaciones (17) y (20) se deduce que p3 = 0 y de las ecuaciones (19) es fácil deducir que el sistema tiene dos autovalores nulos. Por otro lado, si se supone Im = Iπ/2 + ε con ε > 0, entonces p3 < 0 y se puede comprobar que la parte lineal de las ecuaciones (19) tienen autovalores de la forma λ1,2 = ±i α c p origen Teniendo en cuenta las ecuaciones de equilibrio (13), se puede deducir un conjunto de ecuaciones similar a las (19), en donde p3 debe ser sustituido por p2 definido por la ecuación. ⎛π ⎞ Ka K p I p2 = Rx3 e − K a K p ⎜ − x1r ⎟ − m ⎝2 ⎠ τi (25) y por tanto el punto de Si ahora se toma: equilibrio P3 es un foco débil [13]. La estabilidad de un foco viene dada por el signo del primer valor de Lyapunov L1. Los detalles del la forma de operar se pueden encontrar en [[6], [7], [8], [9]. Los resultados se muestran a continuación: L1 = siendo ω = b11b02 8ω 3 αc R + 8ω a3 partir de un modelo similar al (19) to Eq (14) and taking into account the Eq (20), se comprueba que: a) Si Im = Iπ/2 - ε ⇒ El punto P2 es un foco débil. b) Si Im = Iπ/2 ⇒ En el punto P2 aparecen dos autovalores nulos. c) Si Im = Iπ/2 + ε ⇒ El punto P2 es una silla.. (21) Es claro que el caso a) se puede tratar como anteriormente, el caso c) es trivial porque P2 es inalcanzable, y solo el caso b) es problemático porque aparece una bifurcación del tipo Bogdanov-Takens. Sin embargo, esta dificultad α c p3 y los coeficientes b11, b02 y a3 se expresan en función de los parámetros del sistema de la forma: a = δ c p3 + f = Ka K p Rτ i a β c + bω βc + ω 2 2 ;b = Ka K p R 2 ;g = ; c = α c p3 ω ( bβ c − a ) βc + ω 2 2 ⎫ ⎪ ⎪ ⎬ (22) ⎪ ⎪⎭ puede evitarse si más que tomar I m = I +ε 3.3. Equilibrium point or set point P1 (23) Como en los casos anteriores, el análisis de este punto se realiza trasladándolo al origen, y a partir de las ecuaciones (19), los autovalores de la matriz jacobiana vienen dados por las raíces de la ecuación: βc ω (4ω + β c ) 2 π /2 con ε > 0, por tanto el análisis de esta bifurcación no es necesario porque el punto P2 siempre será inestable. b11 = α c ( Rg − τ d K a K pω ) ; b02 = α c ( Rf − K a K p ) a3 = I m = I π / 2 ± ε con ε << 1, a 2 2ω ⎡ ⎤ ( gα c − ωδ c ) ⎢ ⎥ (24) βc ⎢ ⎥ × ⎢⋅ [ ( Rf − K a K p ) − ( Rg − τ d K a K pω ]⎥ ⎢ ⎥ − γ cω 2 ⎢ ⎥ ⎢⎣ ⎥⎦ ⎫ ⎪ λ + b2 λ + b1λ + b0 = 0 ⎪ 2 jK m K a K pτ d ⎞ ⎪ H ⎪ ⎛ b2 = β c ; b1 = cos x1e ⎜ cos x1e + ⎟ ⎬ JT H r HR ⎝ ⎠ ⎪ ⎪ HK a K p ⎛ 1 ⎞ ⎪ b0 = β c x 1 − cos 1e ⎜ βτ ⎟ jK b H r ⎝ ⎭⎪ c i ⎠ 3 Si L1 > 0 el punto de equilibrio P3 será inestable, si L1 < 0 el punto de equilibrio será estable. Si L1 = 0 es necesario reducir el sistema (52) en la variedad central considerando términos de hasta 5.orden [13] Esto es debido a que se puede demostrar que los términos pares del desarrollo en serie de Taylor no influyen en las propiedades de estabilidad del foco débil. Se concluye que las ecuaciones (21), (22), (23) y (24) nos dan un criterio para conocer las propiedades de estabilidad del punto P3. 2 (26) A partir del criterio de estabilidad de RouthHurwitz se deduce que el punto P1 será estable si los coeficientes b0, b1 y b2 son positivos y se verifica la desigualdad a b1b2 > b0 . Esto implica que -π/2 < x1e < π/2, con 1 > 1 β τ . Puesto que c i βc >> 1 de acuerdo con los valores de los parámetro de la leyenda de la figura 1 y de la ecuación (11), la estabilidad del punto P1 esta asegurada. Con los resultados anteriores se puede diseñar un algoritmo de cálculo para ajustar los parámetros del regulador PID. 3.2 Punto de equilibrio P2 En este caso el análisis del punto de equilibrio se realiza trasladando el punto de equilibrio al 5 bifurcación del tipo Andronov-Poincaré-Hopf.. Tomando Im = Iπ/2 + ε, de las ecuaciones (28) y (31) se deduce: Ka K p ⎛ π ⎞ p3 = − K a K pπ − ⎜ ε − ⎟ (32) 4 AJUSTE DE LOS PARAMETROS DEL REGULADOR PID El análisis de las bifurcaciones en los puntos P2 y P3 revela que si la acción integral se limita a Im = Iπ/2 + ε el punto P2 es una silla y el primer valor de Lyapunov L1 es positivo, y por tanto los puntos P2 y P3 son inalcanzables. Por otro lado, a partir de las ecuaciones (26) el valor de x1e debe de estar en el intervalo -π/2 < x1e < π/2. Por tanto, a partir de las ecuaciones (13), particularizadas en el punto P2 quedan de la forma: ⎛π ⎞ K a K p I π / 2 = 0⎫ π /2 Rx3 e − K a K p ⎜ − x1 r ⎟ − ⎪ ⎝2 ⎠ τi ⎪ − β c x3 e π /2 τi A partir de las ecuaciones (21)-(24) y (27)-(32) y de la condición -π/2 < x1e < π/2 se deduce el siguiente algoritmo de cálculo de los parámetros del regulador PID: 1. ⎬ jK b ∗ π ⎛ ⎞ M =0 ⎪ + ⎜ − x1r ⎟ + Rτ i ⎝ 2 ⎠ RJ T ⎭⎪ 2. Ka K p 3. (27) Sustituyendo Im = Iπ/2 + ε en la segunda ecuación (13), es posible eliminar Iπ/2 entre las ecuaciones (13) y (27) para dar: 4. 5. K a K p ( x1e − x1r ) = Rx3 e − Rx3 e π /2 ⎛ π − x ⎞ − Ka K p ε 1r ⎟ ⎝2 ⎠ τi + Ka K p ⎜ Rx3 e (28) ⎬ jK b ∗ ⎤ ⎪ ⎡ Ka K p ⎛ π ⎞ M ⎥ = ⎜ − x1r ⎟ + β c ⎢⎣ Rτ i ⎝ 2 ⎠ RJ T ⎦⎭⎪ R (29) Restando las ecuaciones (24) se deduce: Ka K p ⎛ π⎞ ⎜ x1e − ⎟ τ i βc ⎝ 2⎠ Tomar un valor para el momento cinético del giroscopio H, par de perturbación M* y ángulo x1r. Si -π/2 < x1r < π/2 se puede elegir x1r≡ x1e. Escoger un punto de consigna x1e tal que π/2 < x1e < π/2. Teniendo en cuenta (32), tomar ε > π/βc para tener p3 < 0. El valor de ε no debe ser ni muy grande no muy pequeño para tener valores admisibles de τi. Calcularτi de la ecuación (31) con τi > 0. Escoger un intervalo de valores de K p K pmin , K pmax y τ d τ dmin ,τ dmax . [ ] [ ] Considerando las ecuaciones (21) a (24) y (31), (27) determinar el primer valor de Lyapunov de la forma: for i = 1:NKp for j = 1:Nτd L1(i,j) = f[τi, p3, Kp(i), τd(j)]; end end 6. Representar L1(i,j) frente a τd tomando Kp como parámetro. 7. Elegir valores de Kp y τd para tener L1 > 0. Así el punto de equilibrio P3 será inestable. Es posible elegir distintas combinaciones de Kp y τd para dar L1 > 0. 8. Seleccionado Kp calcular Iπ/2 a partir de (16). La máxima acción integral Por otro lado, de las ecuaciones (16) y (28) se deduce: jK R ⎡ Ka K p ⎤ ⎫ Rx3 e = ( x1e − x1r ) + b M ∗ ⎥ ⎪ ⎢ β c ⎣ Rτ i RJ T ⎦ ⎪ π /2 βc ⎠ ⎝ será: I m = I π / 2 + ε , de forma que el Sustituyendo la ecuación (30) en la (27) se obtiene una ecuación que relaciona el tiempo de reset τi del regulador PID con el ángulo de equilibrio deseado x1e : π − 2 x1e + 2 β c ε (31) τi = β c ( π − 2 x1e ) punto P2 será inalcanzable. Si el valor de Im es muy pequeño o negativo es necesario repetir los pasos anteriores hasta alcanzar un valor razonable. 10. Comprobar que P1 es estable a partir de las ecuaciones (26). La condición de estabilidad de P1 es b1b2 > b0, que se cumple sin problemas en casi todos los casos prácticos a partir de los datos en la leyenda de la figura 1. El valor de p3 < 0 viene dado or la ecuación (20) y es el responsable de que aparezcan dos autovalores complejos conjugados puros en el punto P3, o sea para que aparezca una Cuando todas las condiciones anteriores se cumplen, el diseño del regulador PID está terminado. Una forma sencilla de implementar los pasos anteriores es la siguiente. Rx3e − Rx3πe/ 2 = (30) 9. 6 Figure 2. Valor del primer valor de Lyapunov L1 función del tiempo derivado tomado como parámetro la acción proporcional Kp. Valor del tiempo de reset τi = 1.2784 s.. Figure 3. Diseño gráfico del regulador PID. Tiempo de reset τi = 1.2784 s. Constante de acción proporcional Kp frente al tiempo derivado τd tomando como parámetro el primer valor de Lyapunov L1 7 Cuando se cumplen los pasos anteriores, el diseño del regulador PID se puede dar por terminado. Una forma sencilla de implementar los pasos anteriores es escoger pequeños valores para L1 > 0 y determinar combinaciones de parámetros de Kp y τd que dan el mismo valor de L1. En estas condiciones, la función Kp = f(τd) se puede trazar gráficamente. Las figuras 2 y 3 muestran los resultados obtenidos para cierta combinación de valores de parámetros. Estas figuras se utilizan para seleccionar el regulador PID. De la figura 3 se deduce que para valores fijos del primer valor de Lyapunov y del tiempo de reset, si la acción proporcional disminuye, el correspondiente tiempo derivado debe aumentar, y por tanto es de esperar que se obtenga una respuesta más oscilante, tal como se discute en la siguiente sección. La figura 7 muestra un caso muy interesante, que demuestra la complejidad dinámica del sistema. En este caso se toma un valor de L1 > 0 pero pequeño. Se comprueba que el sistema alcanza el punto de equilibrio después de que el giroscopio tenga un comportamiento casi oscilante alrededor del punto de equilibrio P3. Sin embargo al ser P3 un foco débil inestable el giro termina por abandonar dicho punto y salta al punto de equilibrio. De lo anterior se deduce que desde un punto de vista cualitativo, la respuesta transitoria del giro depende del valor del primer valor de Lyapunov. 6 CONCLUSIONES En este trabajo se presenta un procedimiento para ajustar los parámetros de un regulador PID que controla la posición de un cuerpo unido al anillo exterior de un giroscopio en suspensión Cardan y sometido a pares externos de perturbación. A partir de un modelo simplificado del giro más el sistema de realimentación, se demuestra que el sistema tiene varios puntos de equilibrio, cuya estabilidad se analiza considerando la saturación de la acción integral del regulador PID. En el trabajo se demuestra que dependiendo de la saturación de a acción integral pueden aparecer bifurcaciones del tipo Andronov-Poincaré-Hopf y Bogdanov-Takens. A partir de un valor de saturación de la acción integral solo la bifurcación Andronov-Poincaré-Hopf aparece, la cual esta caracterizada por la presencia de un par de autovalores complejos conjugados puros. En tal caso, la estabilidad del punto de equilibrio viene fijada por el signo de un parámetro, conocido como primer valor de Lyapunov. El cálculo de este parámetro, aunque puede ser penoso, es la única herramienta analítica disponible para predecir resultados difícilmente explicables por otros procedimientos. En particular es posible deducir algoritmos que permitan diseñar leyes de control adecuadas, y además, permite explicar ciertos comportamientos oscilatorios y/o caóticos que pueden presentarse en muchos sistemas dinámicos. En el trabajo se muestra claramente como en función de los parámetros del regulador PID, puede variar el signo del primer valor de Lyapunov, lo cual conlleva un cambio en las propiedades dinámicas del sistema. En particular, es posible diseñar un algoritmo que permita la determinación de los parámetros del regulador PID para que se alcance un ángulo prefijado del anillo interior del giroscopio o punto de consigna. [9]. Las ideas expuestas en este trabajo se pueden extender a muchos sistemas con diferentes estructuras de control. 5 SIMULACIONES Y DISCUSIÓN DE LOS RESULTADOS En todas las simulaciones se utiliza el método de Runge-Kutta con pasos de integración comprendidos entre 0.00001 y 0.0001 s, para evitar problemas numéricos. En primer lugar se estudia la dinámica del giroscopio cuando el punto de consigna x1e y la referencia x1r coinciden. Los resultados de la simulación se muestran en la figura 4. Los valores de Kp yτd se toman de la figura 3 para un valor del primer de Lyapunov de L1 = 0.5 > 0. Es importante que el valor de Lyapunov no sea demasiado pequeño, ya que su valor se ha obtenido considerando los desarrollos en serie de Taylor hasta términos de tercer orden [6], [7], [8], [9]. Por eso es posible que el método numérico sea incapaz de distinguir la inestabilidad del punto P3 si L1 se toma muy pequeño. Por ejemplo para valores -0.001 < L1 < 0.001 nada puede asegurarse respecto a la estabilidad o inestabilidad de P3. Es claro que este problema se evita fácilmente y que no afecta a la estructura del algoritmo propuesto. Si se toma L1 = -0.5 < 0, la figura 5 muestra que el giroscopio evoluciona primero hacia el punto P2, sin embargo como Im = Iπ/2 + ε = 11.1570 + 2 > Iπ/2 = 11.1570, este punto es una silla inestable. Por consiguiente, transcurrido cierto tiempo el sistema salta al punto de equilibrio P3, el cual es un foco débil estable. De lo anterior se concluye que con condiciones iniciales nulas, o sea con el giroscopio en reposo no es posible alcanzar el punto de consigna. Es interesante resaltar que este comportamiento dinámico no es intuitivo y puede ser muy difícil de comprender sin el análisis de la naturaleza de los puntos de equilibrio y de las posibles bifurcaciones en dichos puntos. 8 Figura 4. Respuesta del giroscopio a) y b): nr = 2000 r.p.m.; M* = 100 N.m; x1r = x1e = 0 rad; ε = 2; τi = 1.2784 s; L1 = 0.5 > 0; Kp = 0.0997 V; τd = 0.2524 s; Ipi/2 = -0.7178; Im = 1.2822; Condiciones iniciales: β(0) = 0, dβ(0)/dt = 0, i(0) = 0.01 A, x4(0) = 0. Autovalores punto de consigna: [-95.8 ± 48.5j, -3.52]. Figura 5. Valores de parámetros en leyenda figura 1. L1 = -0.5 < 0.: nr = 2000 r.p.m.; M* = 100 N.m; x1r = π/8; ε = 10-5; Kp = 0.026 V τi = 1.827 s; τd = 0.4568 s; Ipi/2 = 4.88; Autovalores en P1 [-25 ± 95.56j; 6.73.10-5 ± 172.4j]. P1 ≈ P2 = π/2. 9 Figura 6. Valores de parámetros y condiciones iniciales están indicados en leyenda de la figura 9. Valores de simulación nr = 1500 rpm; M* = 200 N.m; x1r = π/8 rad; ε = 0.5; Kp = 0.026 V τi = 1.827 s; τd = 0.4568 s; Im = 8.7937. Autovalores en el punto de consigna: [-95.8 ± 48.5j, -3.656±1.357j]. L1 = 0.02569 > 0 en P3. [7] Pérez Polo M.F., Pérez Molina M. (2007). Chaotic and steady state behaviour of a nonlinear controlled gyro subjected to harmonic disturbances. Chaos Solitons & Fractals 33, 623-641. [8] Pérez Polo M.F., Pérez Molina M. (2007). A generalized mathematical model to analyze the nonlinear behavior of a controlled gyroscope in gimbals. Nonlinear Dynamics 48, 129-152 . [9] Pérez Polo M.F. Albertos P.,Berná Galiano J.A. (2008). Tuning of a PID controlled gyro by using bifurcation theory. Systems & Control Letters 57, 10-17. [10] Pérez Polo M.F., Pérez Molina M., Gil Chica J. (2007). Chaotic dynamic and control for Micro-Electro-MechanicalSystems of massive storage with harmonic base excitation. Chaos Solitons & Fractals (En prensa). [11] Shilnikov L-P, Shilnikov A.L., Turaev D.V., Chua, L.O. (2001). Methods of qualitative theory in nonlinear dynamics. Part II. New Jersey. World Scientific. [12] Wiggins S. (2002). Introduction to Applied Nonlinear Dynamical Systems and Chaos. Springer Verlag. N.Y. Referencias [1] Berná Galiano J.A. (2006) Diseño de algoritmos de control no lineales con aplicación a los problemas de seguimiento y regulación. Tesis Doctoral. Universidad de Alicante. [2] Glendinning, P.(1996). Stability, Instability and Chaos. Cambridge University Press. [3] Guckenheimer J., Holmes P. (1983). Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields. Springer Verlag, London. [4] Kutnesov Y. A. . (1998). Elements of Applied Bifurcation Theory. Springer Verlag, London. [5] Pérez Polo M.F., Berná Galiano J.A. Gil Chica J., Montava M.A. (2006). Control no lineal MIMO de un giroscopio en suspensión Cardan. XXVII Jornadas de Automática. Almería. [6] Pérez Polo., M:F.. Pérez Molina (2004). Regular self-oscillating and chaotic behaviour of a PID controlled gimbal suspensiom gyro. Chaos Solitons & Fractals, 21, 1057-1074. 10