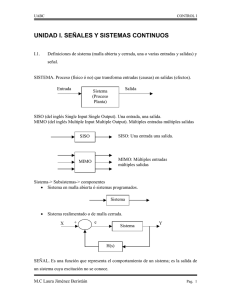
j - Uabc
Anuncio

UABC
MODELADO DE SISTEMAS DINAMICOS
Modelado matemático utilizando Funciones de Transferencia
Definición. La Transformada de Laplace de una señal o función f(t) se simboliza
∞
F(s)=L{f(t)} y se define por: F ( s ) = L{ f (t )} = ∫ f (t )e − st dt
0
donde s = σ + jω es una variable compleja, y a f(t) y F(s) se conocen como el par
transformado de Laplace.
En la tabla II.1 se muestran algunas de las fórmulas de las transformadas de Laplace.
TABLA II.1 ALGUNOS PARES TRANSFORMADOS DE LAPLACE.
f (t )
F (s )
f (t )
F (s )
δ (t )
1
e at
1
s−a
ua (t )
1
s
e jωt
1
s − jω
u0 (t − a)
1 − as
(e )
s
e − jωt
1
s + jω
t
1
s2
cos ωt
s
s +ω2
n!
s n +1
senωt
A
s
cosh ωt
1
s+a
senhωt
tn
A
e − at
2
ω
s +ω2
2
s
s −ω2
2
ω
s −ω2
2
PROPIEDADES Y TEOREMAS
Linealidad . Sean f1(t) y f2(t) funciones del tiempo cuyas transformadas de Laplace
existen y sean a y b dos constantes entonces:
L{a f 1 (t ) + b f 2 (t )} = a F1 ( s ) + b F2 ( s )
Transformada de la derivada . Si la señal f(t) es diferenciable para t ≥ 0 entonces
L f | (t ) = sF ( s ) − f (0)
{
}
La derivada en el dominio del tiempo llega a ser la multiplicación por la variable de
frecuencia “ s ”, más un término que contiene la condición inicial f(0).
M.C Laura Jiménez Beristáin
Pag. 1
UABC
MODELADO DE SISTEMAS DINAMICOS
En general para la enésima derivada:
L f n (t ) = s n F ( s ) − s n −1 f (0) − s n − 2 f | (0) − L − f (n −1) (0)
{
}
Propiedad de integración . La operación de integración en dominio del tiempo se
transforma en la operación algebraica de multiplicación 1/s en el dominio “ s “. La
transformada de una integral se encuentra a partir de la siguiente definición:
t
1
L ∫ f (t )dt = F ( s )
0
s
{
}
Desplazamiento (traslación) del tiempo . La traslación en el dominio del tiempo
corresponde a la multiplicación de un exponencial en el dominio de la frecuencia.
L{ f (t − t 0 )u (t − t 0 )} = e −t0 s F ( s ), t 0 > 0
Desplazamiento (traslación) de frecuencia . La traslación en el dominio de la frecuencia
corresponde a multiplicar con un exponencial en el del tiempo.
L{e − at f (t )} = F ( s + a)
Cambio de escala. La propiedad de cambio de escala da la relación entre f(t) y F(s)
cuando la variable del tiempo se multiplica por una variable constante positiva.
1 s
L f (at )} = F , a > 0
a a
donde la constante “a” se conoce como factor de compresión de tiempo.
Multiplicación por t . La multiplicación por la variable en el
corresponde a la diferenciación en el dominio de la frecuencia.
dominio del tiempo
d
F ( s)
ds
dn
L t n f (t ) = (−1) n n F ( s)
ds
L{tf (t )} = −
{
}
Propiedad de la Convolución . La transformada de Laplace de la Integral de convolución:
y (t ) = h(t ) * x(t ) ó y (t ) = ∫ h(τ )x(t − τ ) dτ , sean dos funciones f yg entonces:
t
0
L[ f * g ] = F (s ) G (s )
Teorema del valor final . Para que este teorema produzca resultados finitos correctos,
todas las raíces del denominador de F(s) deben tener partes reales y no más de una puede
estar en el origen
f (∞) = lim sF ( s )
s→0
Teorema del valor inicial . Para que este teorema sea válido, f(t0 debe de ser continua o
tener una discontinuidad de escalón en t=0 (es decir, no pulsos ni sus derivados en t=0).
f (0 + ) = lim sF ( s )
s →∞
M.C Laura Jiménez Beristáin
Pag. 2
UABC
MODELADO DE SISTEMAS DINAMICOS
TRANSFORMADA INVERSA DE LAPLACE
Para obtener la transformada inversa ( L−1 {F ( s )} = f (t ) ) generalmente se
descompone F(s) en términos más simples de tal manera que se puedan encontrar en las
tablas de transformadas. Para lograr la descomposición en términos positivos simples se
descompone la función en fracciones parciales.
La transformada inversa de Laplace, que nos permite encontrar f(t) dada F(s) es:
L−1 {F ( s )} =
1 σ + j∞
F (s )e st ds
∫
σ
−
j
∞
2πj
Método de fracciones parciales.
Sea F ( s ) =
a m s m + a m −1 s m −1 + a m − 2 s m − 2 + a m −3 s m −3 + K + a 0
, entonces L−1 {F ( s )} = f (t )
bn s n + bn −1 s n −1 + bn − 2 s n − 2 + bn −3 s n −3 + K + b0
donde
•
a y b son constantes reales .
•
m y n son enteros positivos.
•
N(s) y D(s) son polinomios en “s”.
•
Los valores de “s” que hacen que N(s) = 0 se llaman ceros de F(s).
•
Los valores de “s” que hacen que D(s) = 0 se llaman polos de F(s).
•
La razón
propia, si n > m
N (s)
se denomina función racional:
D( s)
impropia, si n ≤ m
Función propia: Al descomponer en fracciones parciales se pueden encontrar tres casos
posibles Fracciones parciales
Caso I. Polos simples, reales y distintas.
Caso II. Polos complejos y conjugados.
Para los casos I y II : K j = (s − s j )F (s )e st s = s
[
]
j
Caso III. Polos reales e iguales.
1 d r −1
r
Kj =
F (s )(s − s j ) s = s j
r −1
(r − 1)! ds
Función impropia: Si F(s) es racional impropia entonces es necesario dividir en Num/Den
[
]
(realizar una división larga) hasta llegar a una función racional propia y aplicar el
procedimiento de la transformada inversa de Laplace.
M.C Laura Jiménez Beristáin
Pag. 3
UABC
MODELADO DE SISTEMAS DINAMICOS
Modelado matemático utilizando Variables de estado
El modelo de espacio de estados es una opción para la representación matemática ya que
es de extenso uso en teoría de sistemas y control.
El método de FDT solo es válido para los SLIT, mientras que las ecuaciones de estado,
que son ecuaciones diferenciales de primer orden pueden utilizarse para describir tanto
sistemas lineales como no lineales.
El estado de un sistema se refiere a las condiciones pasadas, presentes y futuras del
mismo.
Para describir las características dinámicas de un sistema es conveniente definir un
conjunto de variables de estado x1 (t ), x 2 (t ),K, x n (t )
y ecuaciones de estado
x&1 (t ), x& 2 (t ),K, x& n (t ) .
Las variables de estado deben satisfacer las siguientes condiciones:
1. En cualquier momento t = t0 , las variables x1 (t 0 ), x 2 (t 0 ),K, x n (t 0 ) definen los
estados iniciales del sistema en el tiempo inicial seleccionado.
2. Una vez que se especifican las entradas al sistema para t≥ t0 y se definen los
estados iniciales como se acaba de describir, las variables de estado deben definir
totalmente el comportamiento futuro del sistema.
Definición:
Variables de estado: Son un conjunto mínimo de variables x1(t), x2(t)…,xn(t) tal que
su conocimiento en t = to y la entrada para t≥t0, caracterizan el comportamiento del
sistema para t≥t0.
Ejemplo: Dado el siguiente sistema, representarlo en variables de estado.
u(t)
U(s)
Sistema
Planta
Proceso
y(t)
Y(s)
d3
d2
3 3 y − 2 2 y − 6 y = 3u (t )
dt
dt
3 y ' ' '−2 y ' '−6 y = 3u
M.C Laura Jiménez Beristáin
Pag. 4
UABC
MODELADO DE SISTEMAS DINAMICOS
.
x1 = y
x&1 = y = x 2
.
x2 = y
.
..
.
...
x 2 = y = x3
..
x3 = y
x3 = y = u +
2
x3 + 2 x1
3
Gráfica de flujo de señal
.
x = Ax + Bu
y = Cx
x& 3
x. 1 0 1
x 2 = 0 0
.
x3 2 0
.
x3
X(s) s-1
U(s)
2
3
0 x1 0
1 x 2 + 0 u
2
x3 1
3
s-1
x& 2
x2
s-1
x1
1
x&1
2
x1
y = [1 0 0] x 2
x3
Las ecuaciones diferenciales de primer orden, llamadas ecuaciones de estado, pueden
expresarse de manera conveniente en forma matricial.
.
x = Ax + Bu
y = Cx + Du
En general para un sistema lineal de orden n para el que hay n variables de estado, n
ecuaciones de estado y p entradas, se tiene:
A
U
B
∫
∑
C
∑
Y
x
x
D
donde:
x = Vector de estado, formado por una matriz columna de (n x 1)
A = Matriz del sistema (n x n)
B = Matriz de entrada (n x p)
C = Matriz de salida (1 x n)
u = Vector de entrada (p x 1)
La representación anterior se generaliza para sistemas MIMO.
A un sistema coordenado n dimensional donde las coordenadas son las variables de
estado se le llama “espacio de estados”.
M.C Laura Jiménez Beristáin
Pag. 5
Y(s)